
Higher-Harmonic Response of a Slender Monopile to Fully Nonlinear Focused Wave Groups


Abstract
:1. Introduction
2. Mathematical Formulation
2.1. Incident Wave Modeling: Spectral Solution Representations
2.1.1. Stream Function Theory for Regular Waves
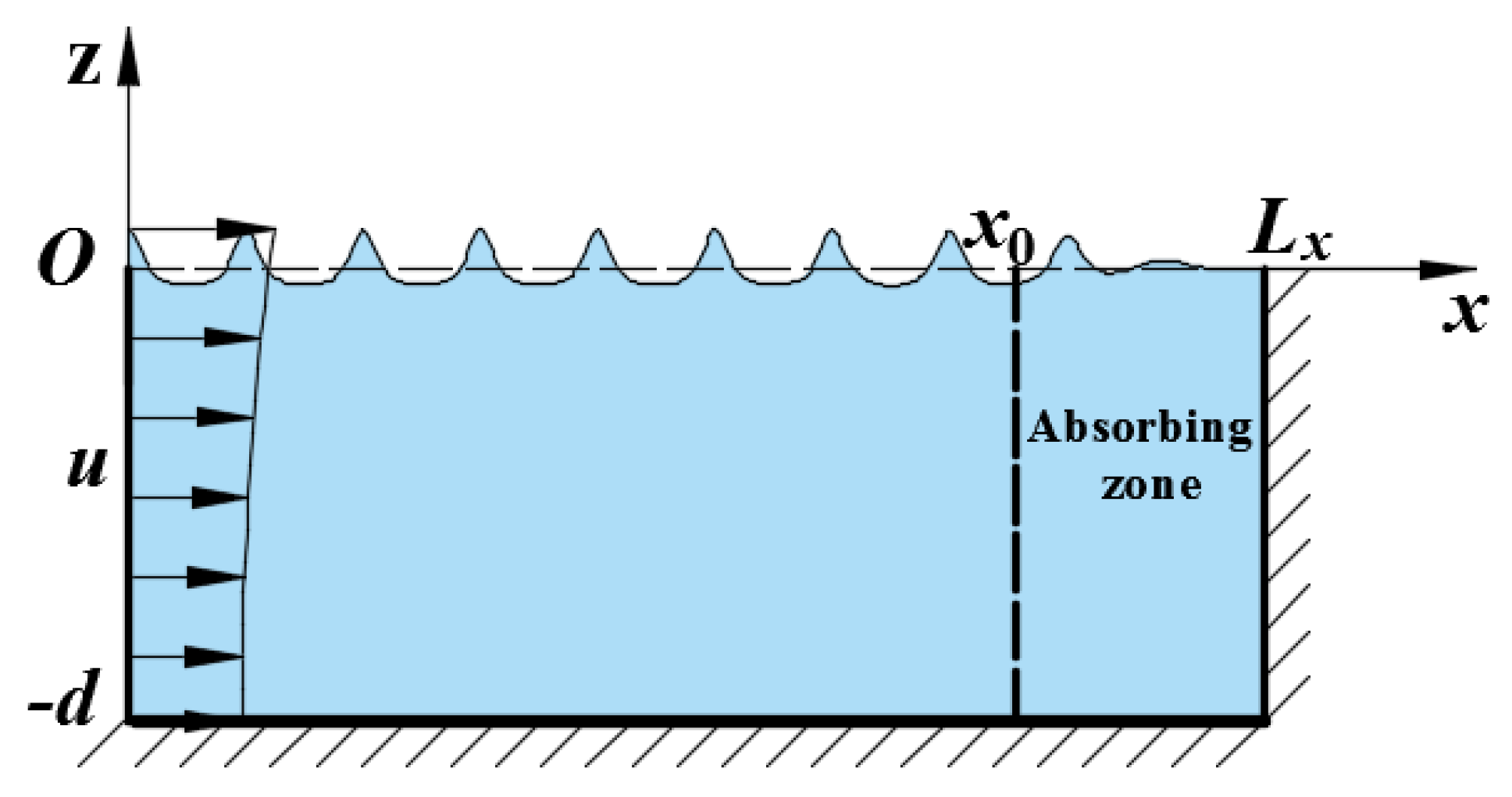
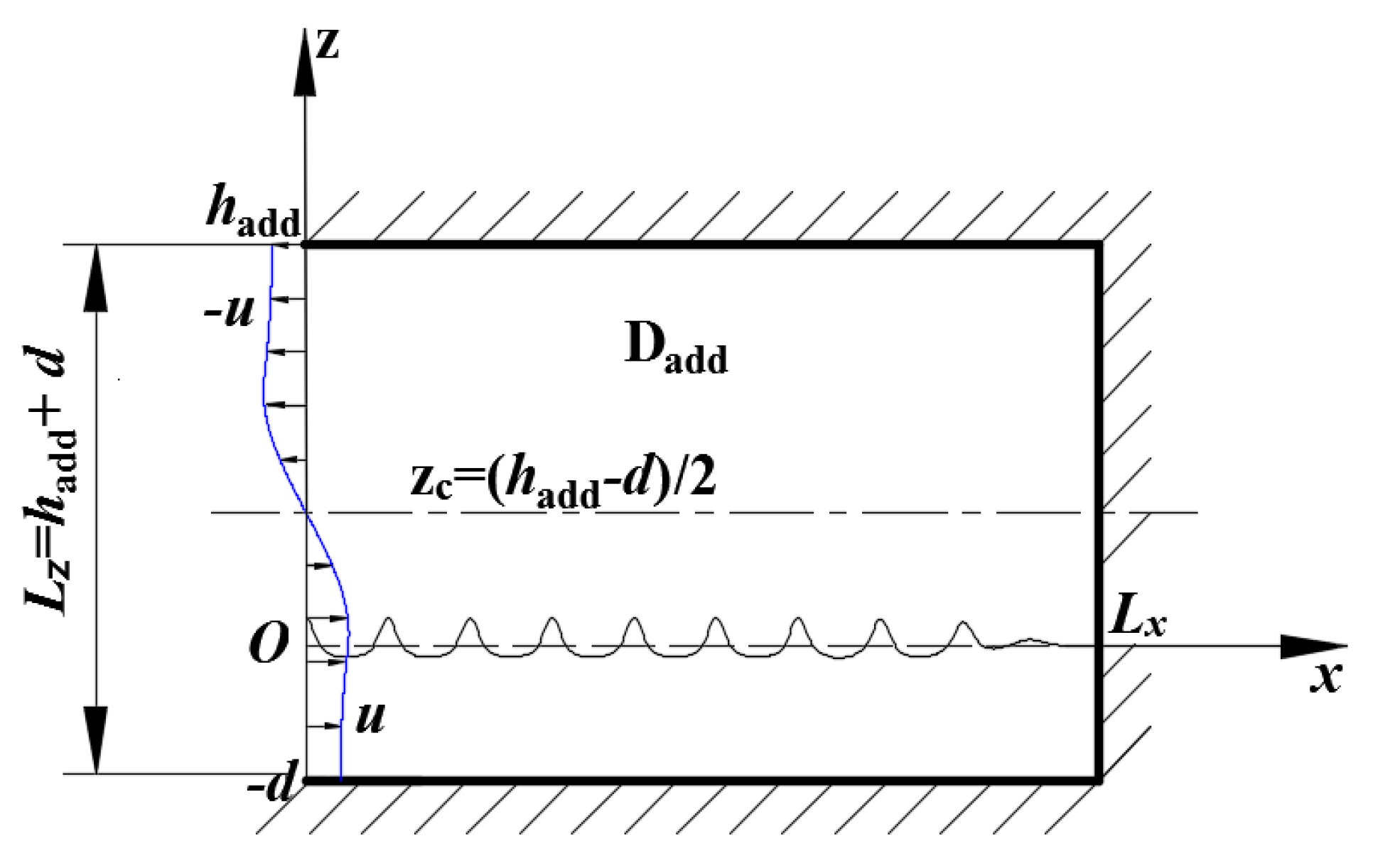
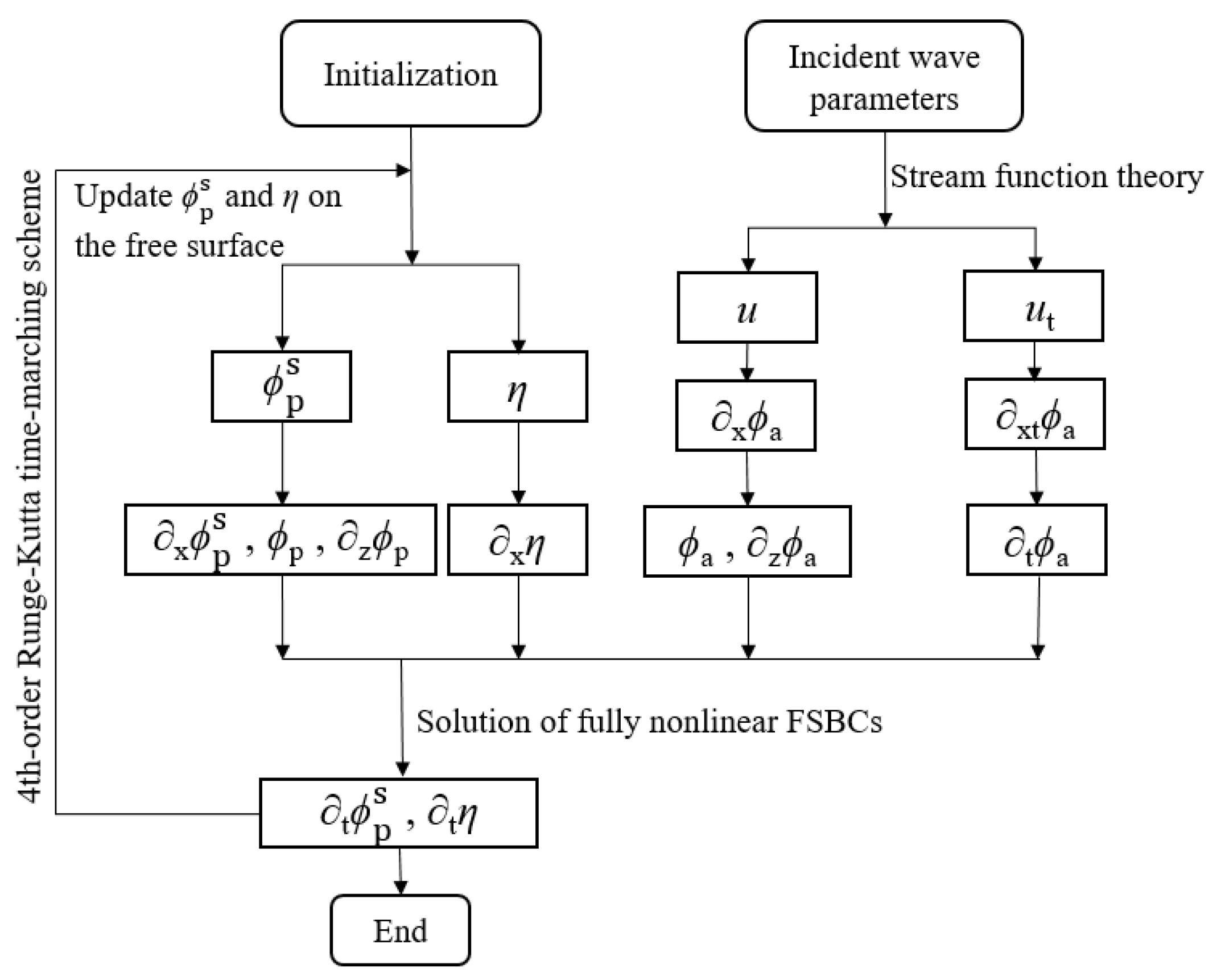
2.1.2. High-Order Spectral Numerical Wave Tank for Focused Wave Groups
2.2. Hydro-Elastic Model for Monopile
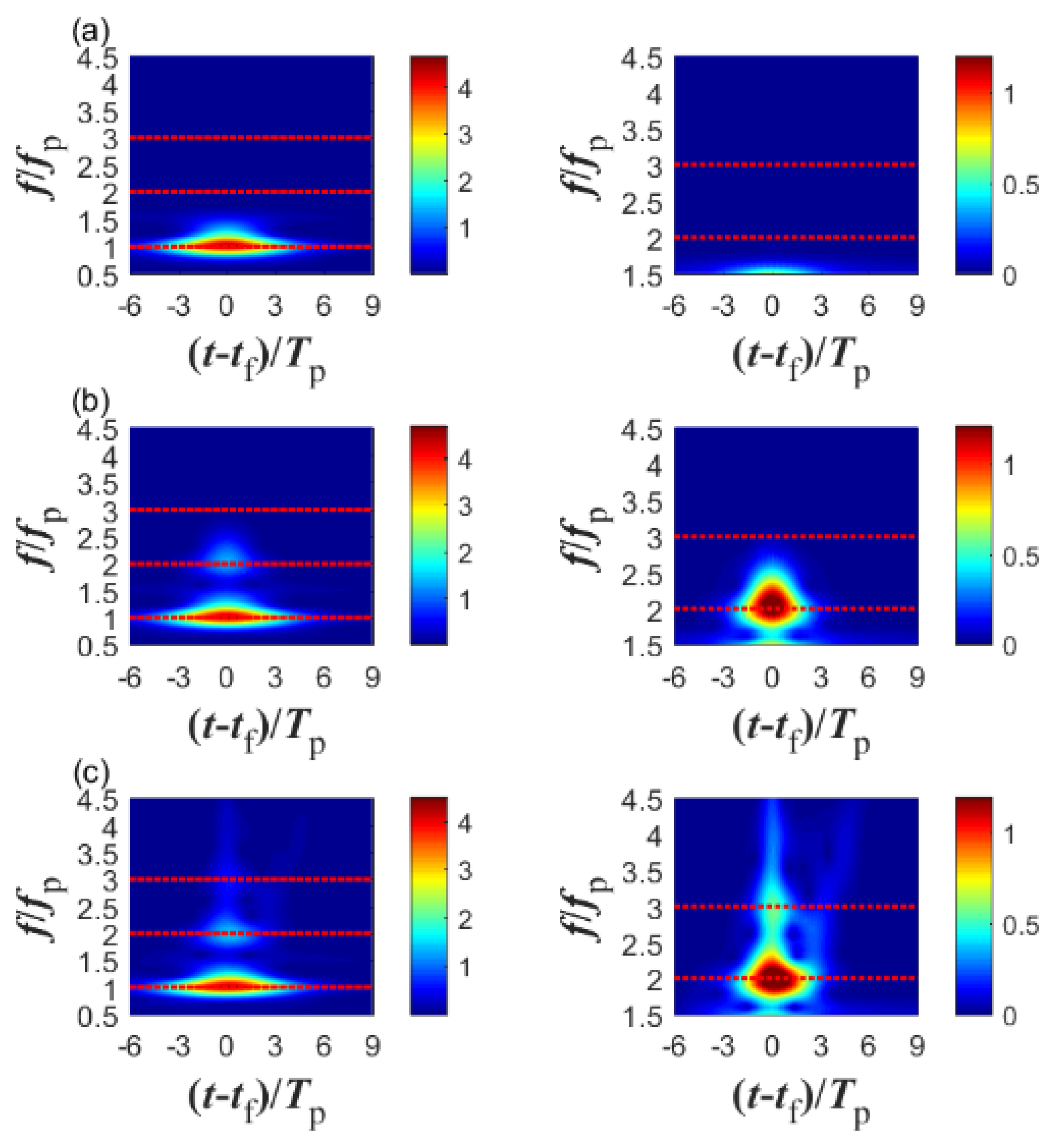
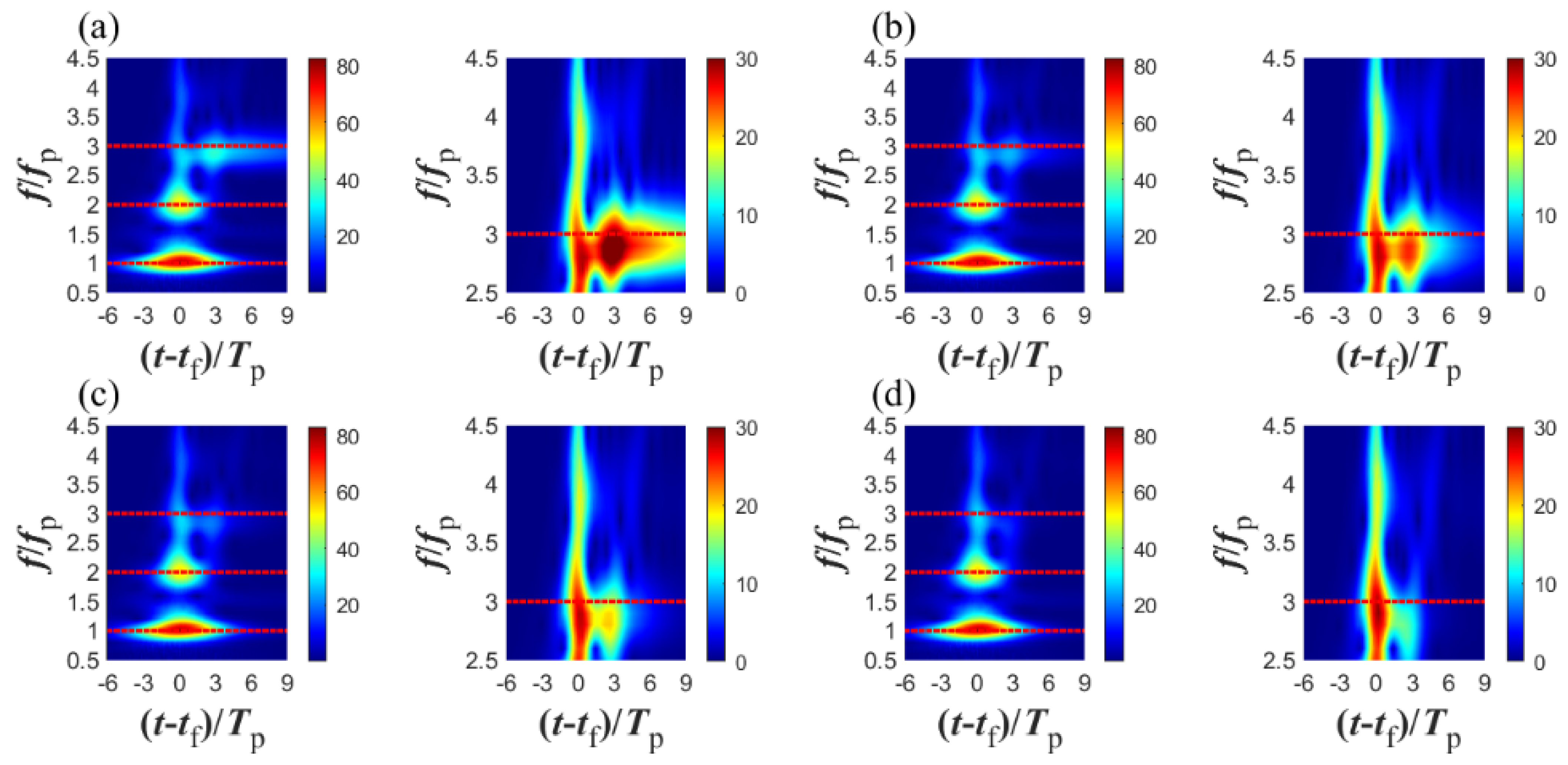
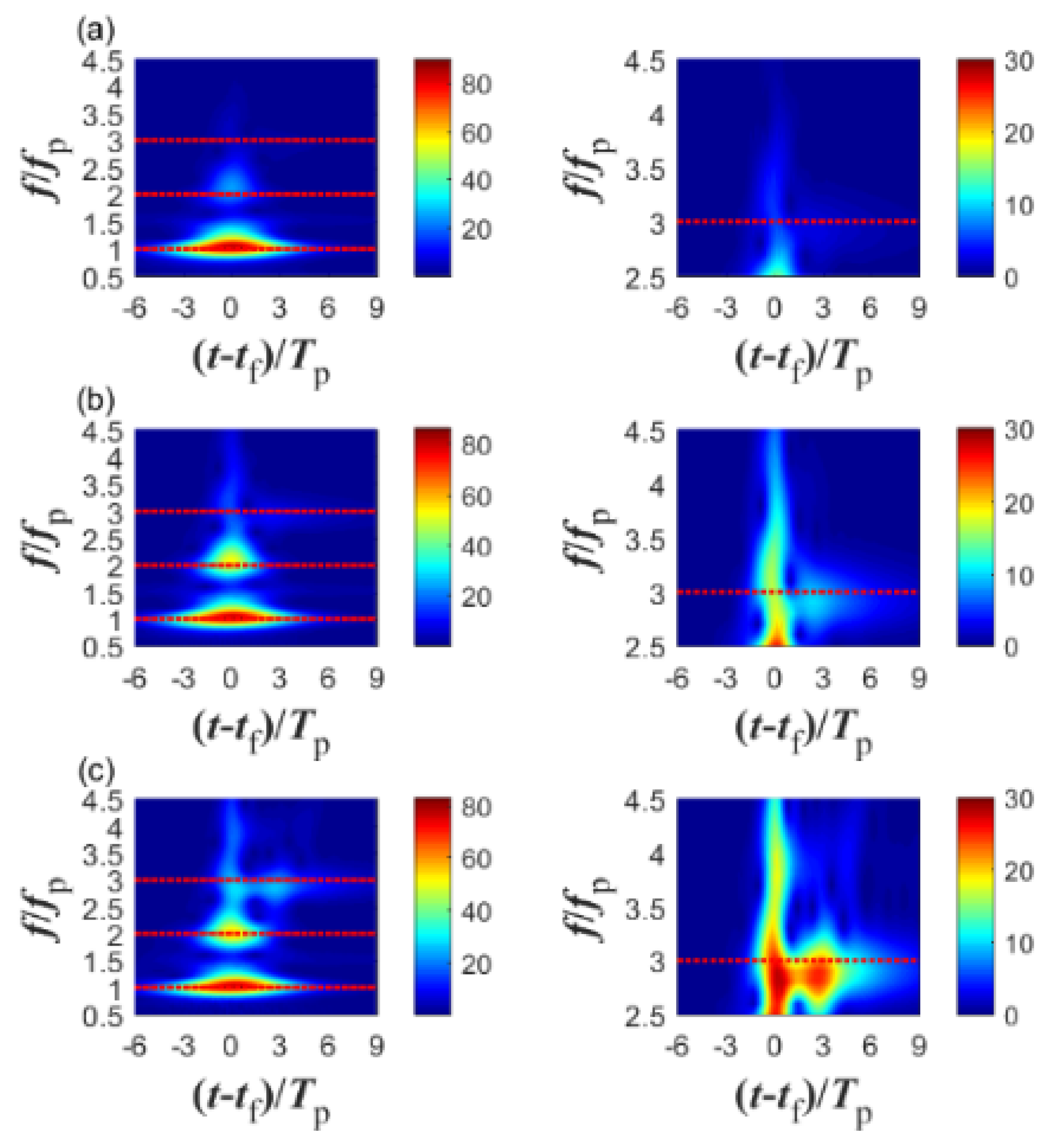
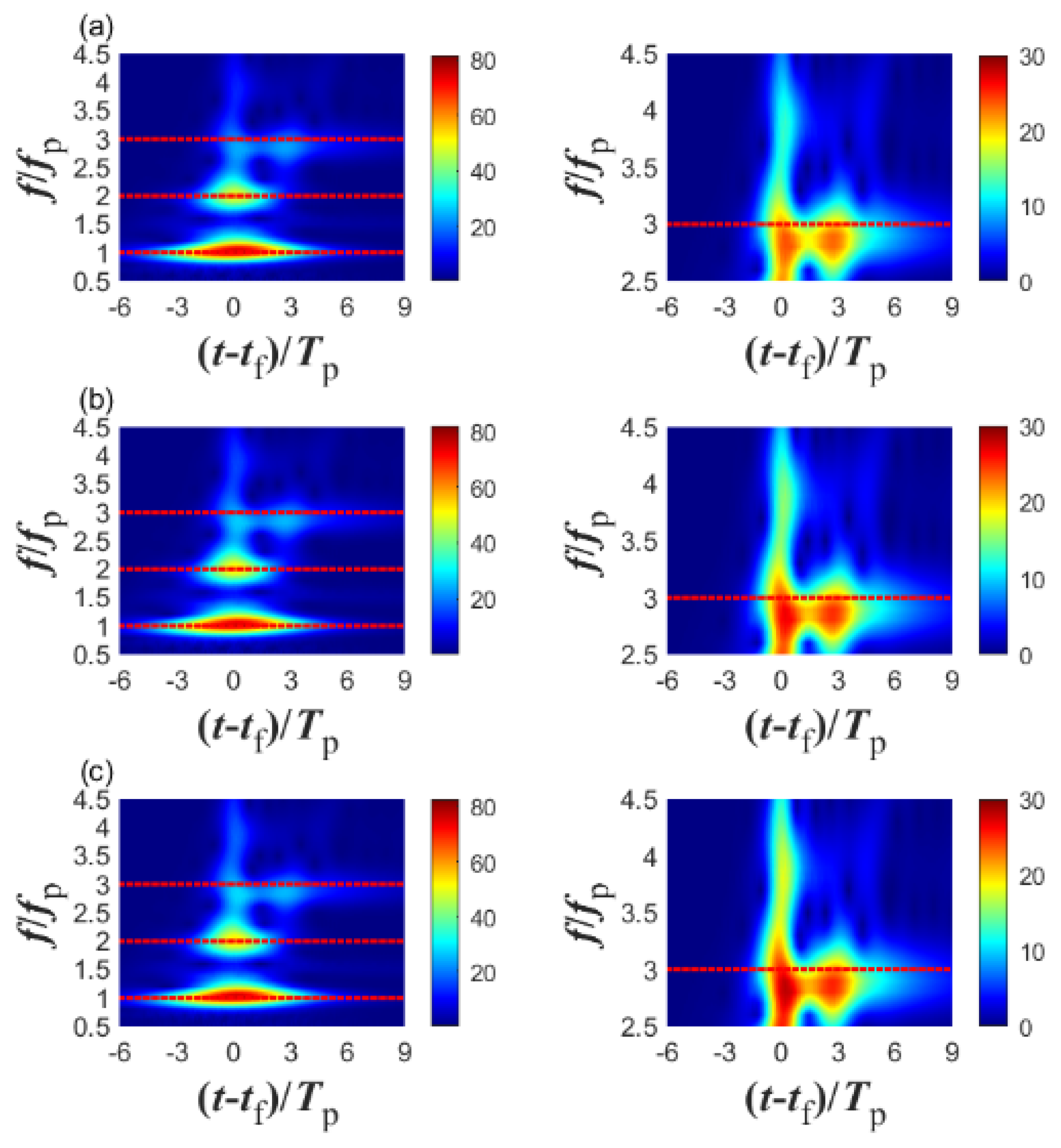
2.3. Wavelet Transform-Based Analyses
3. Comparisons and Verifications
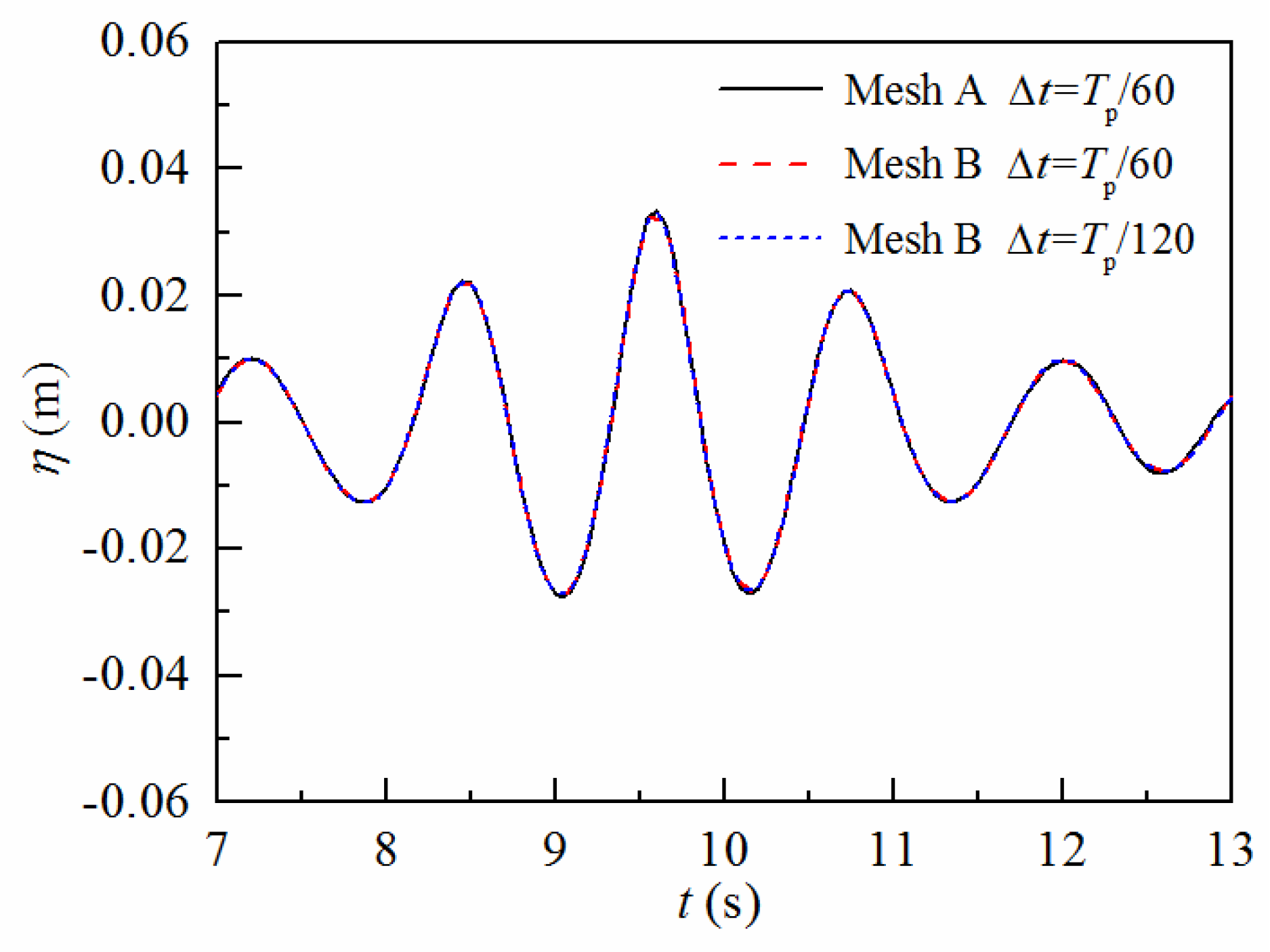
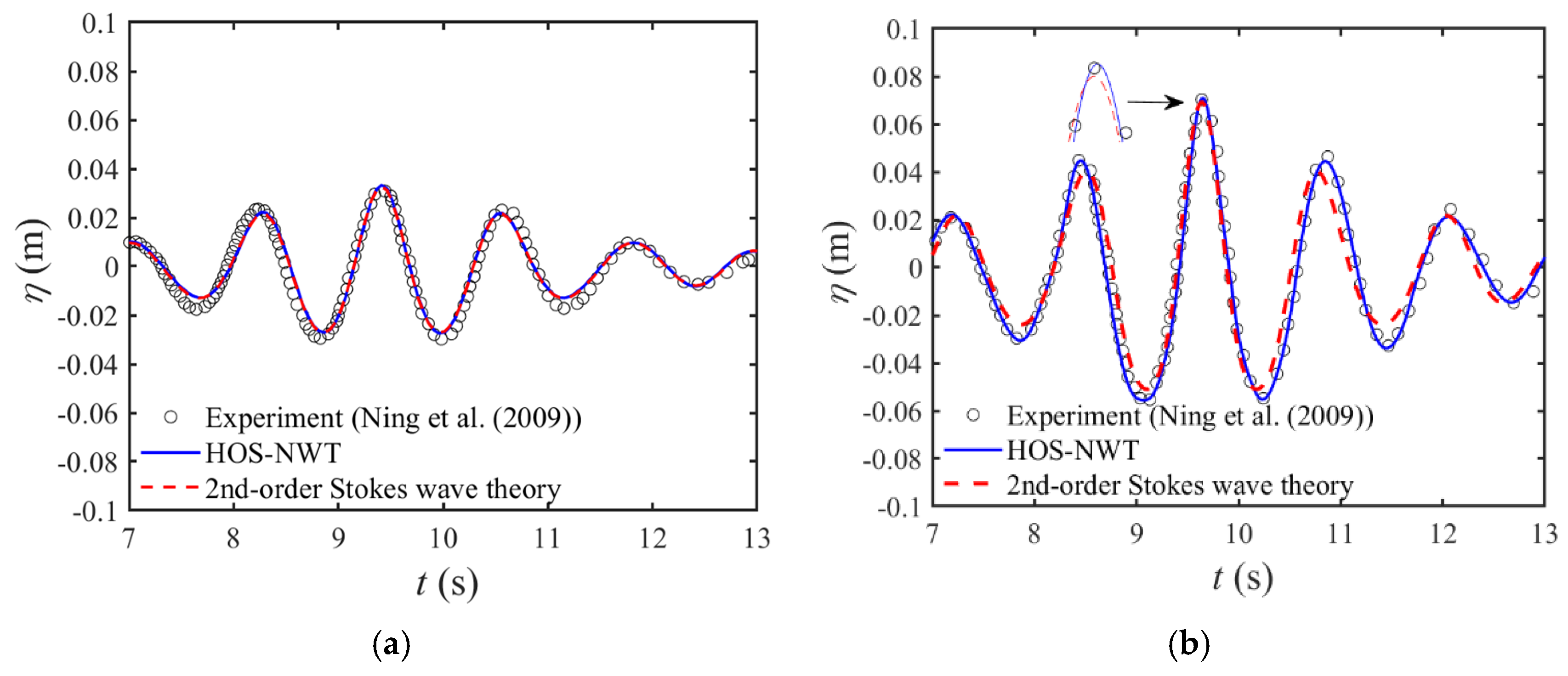
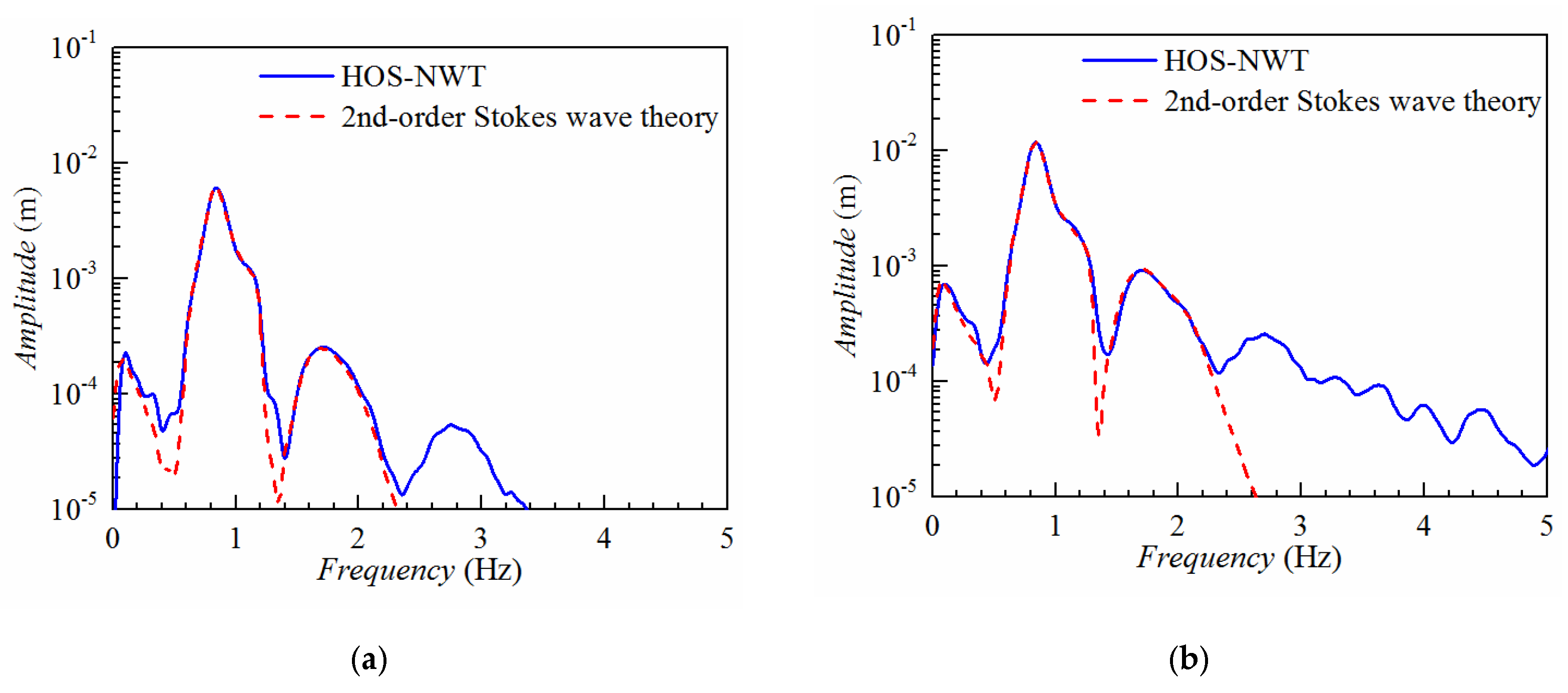
3.1. Validation Tests of Focused Wave Groups
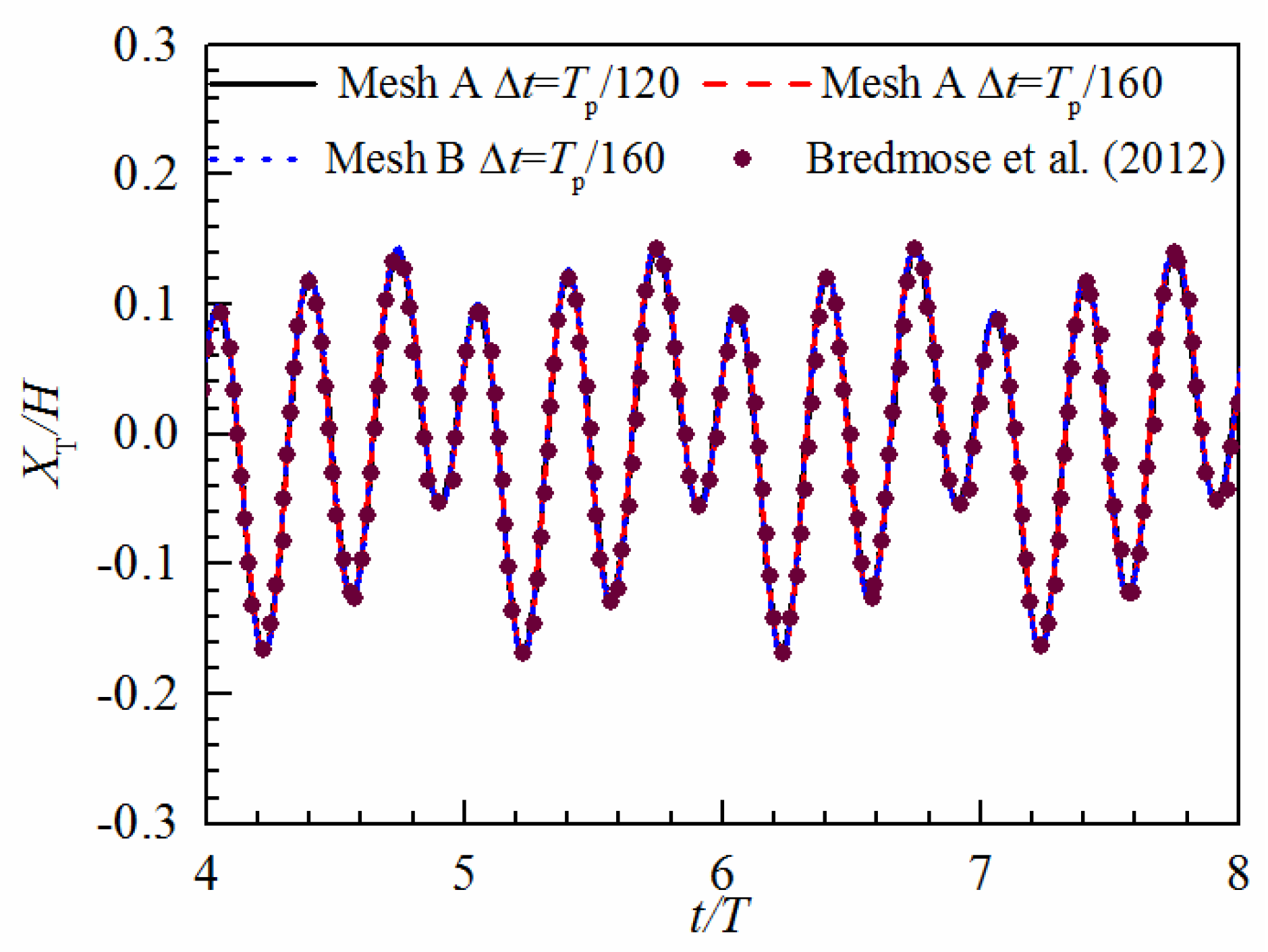
3.2. Validation Tests of Hydro-Elastic Model
4. Numerical Results and Discussion
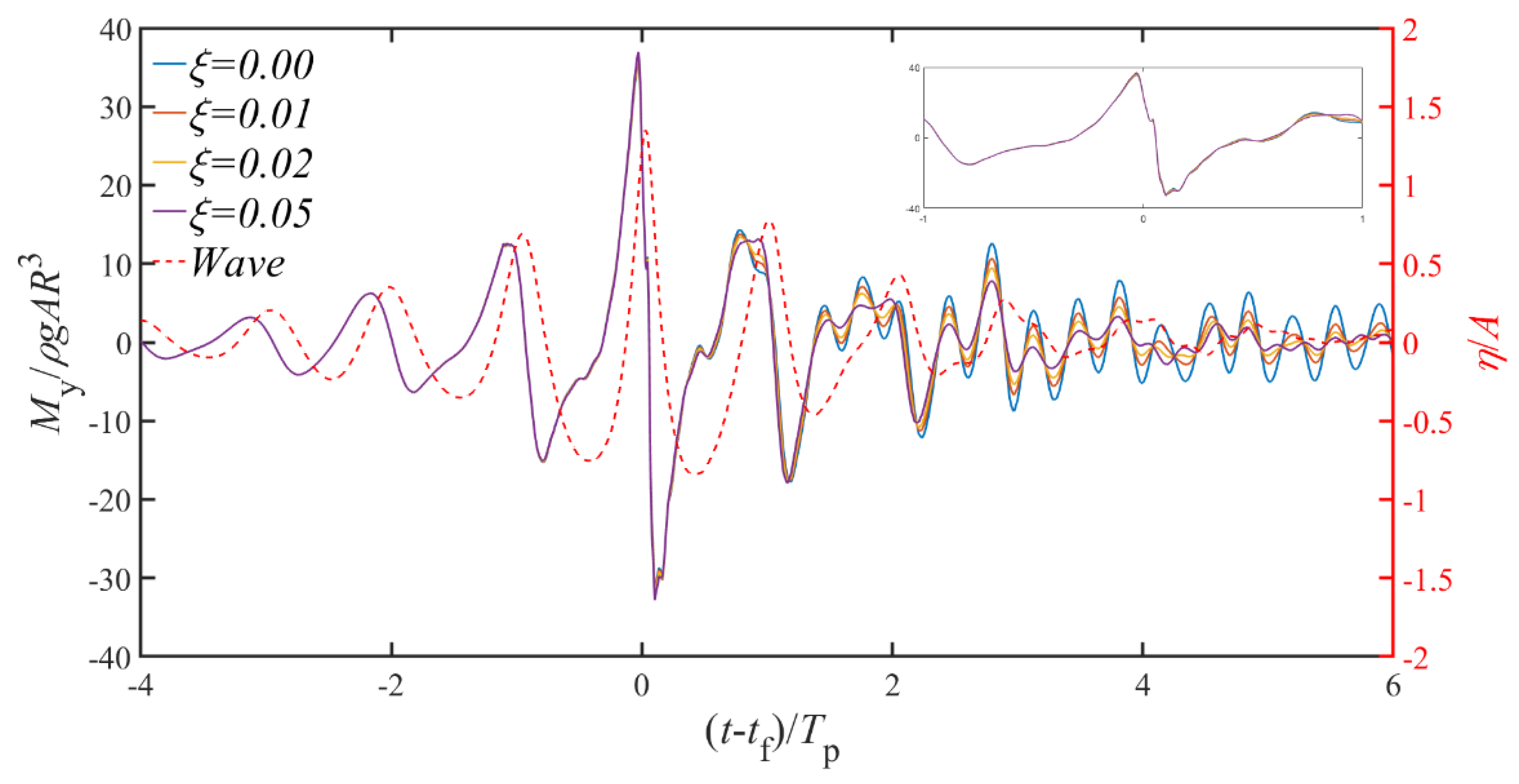
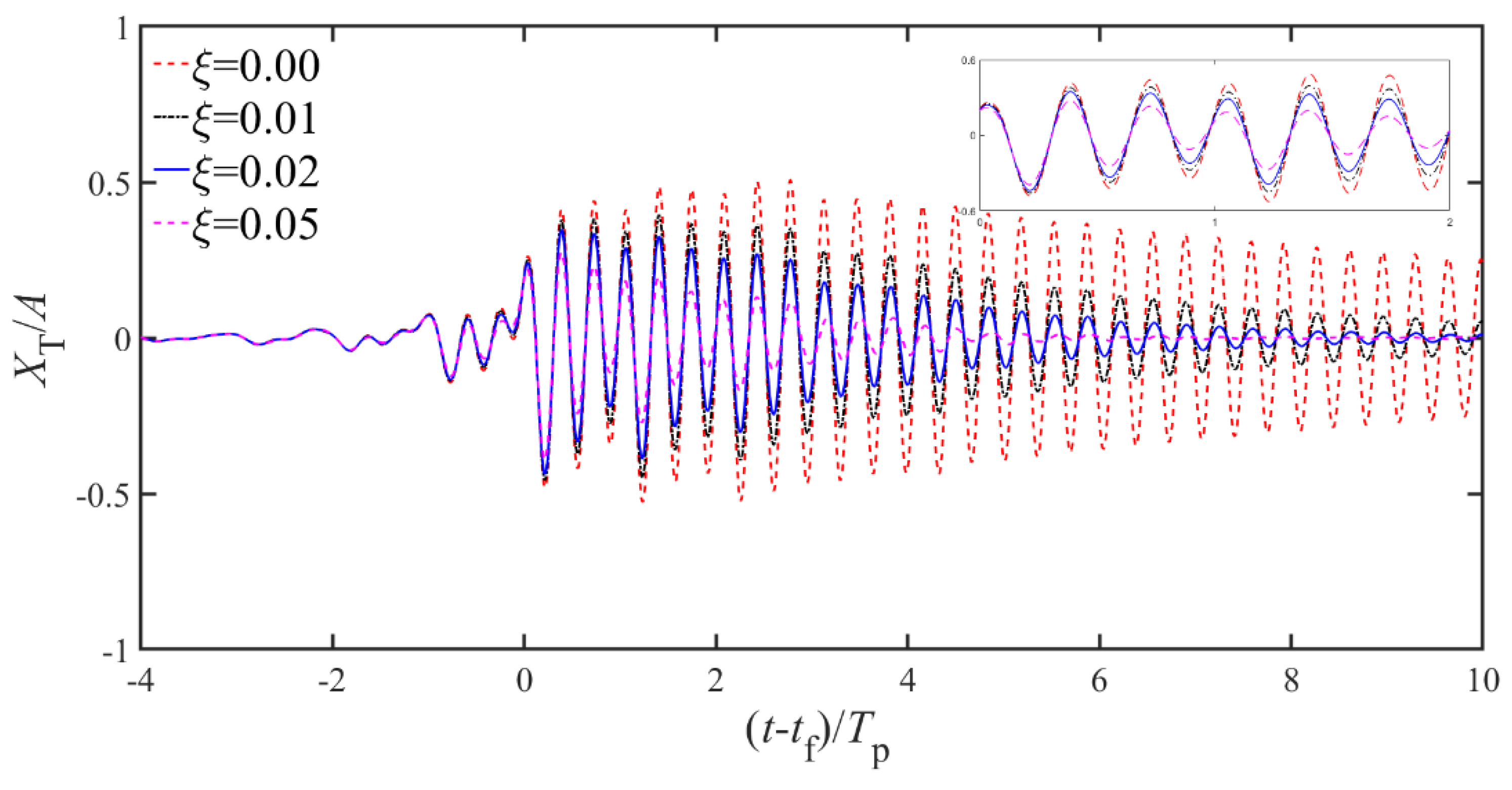
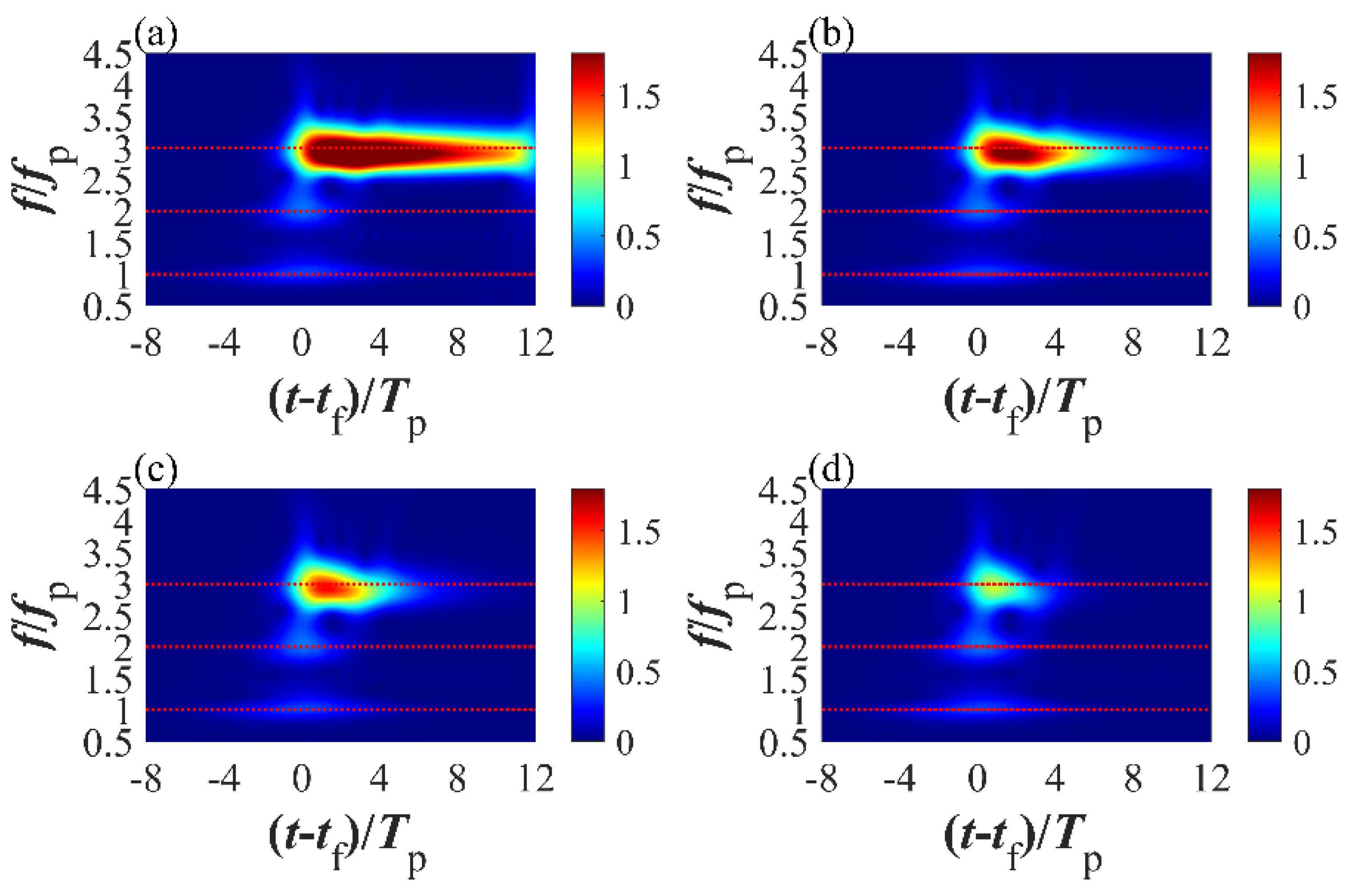
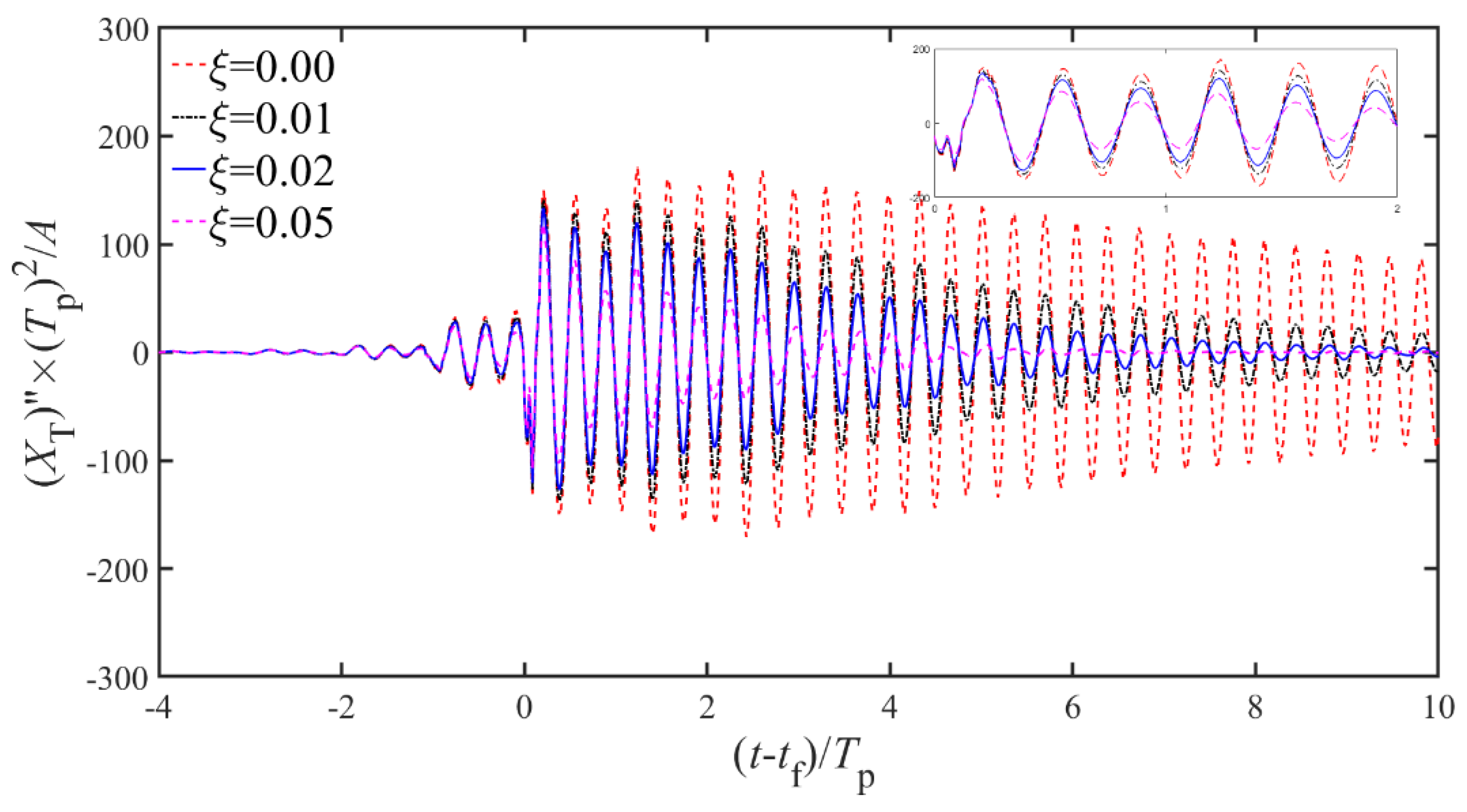
4.1. Damping Ratio Study
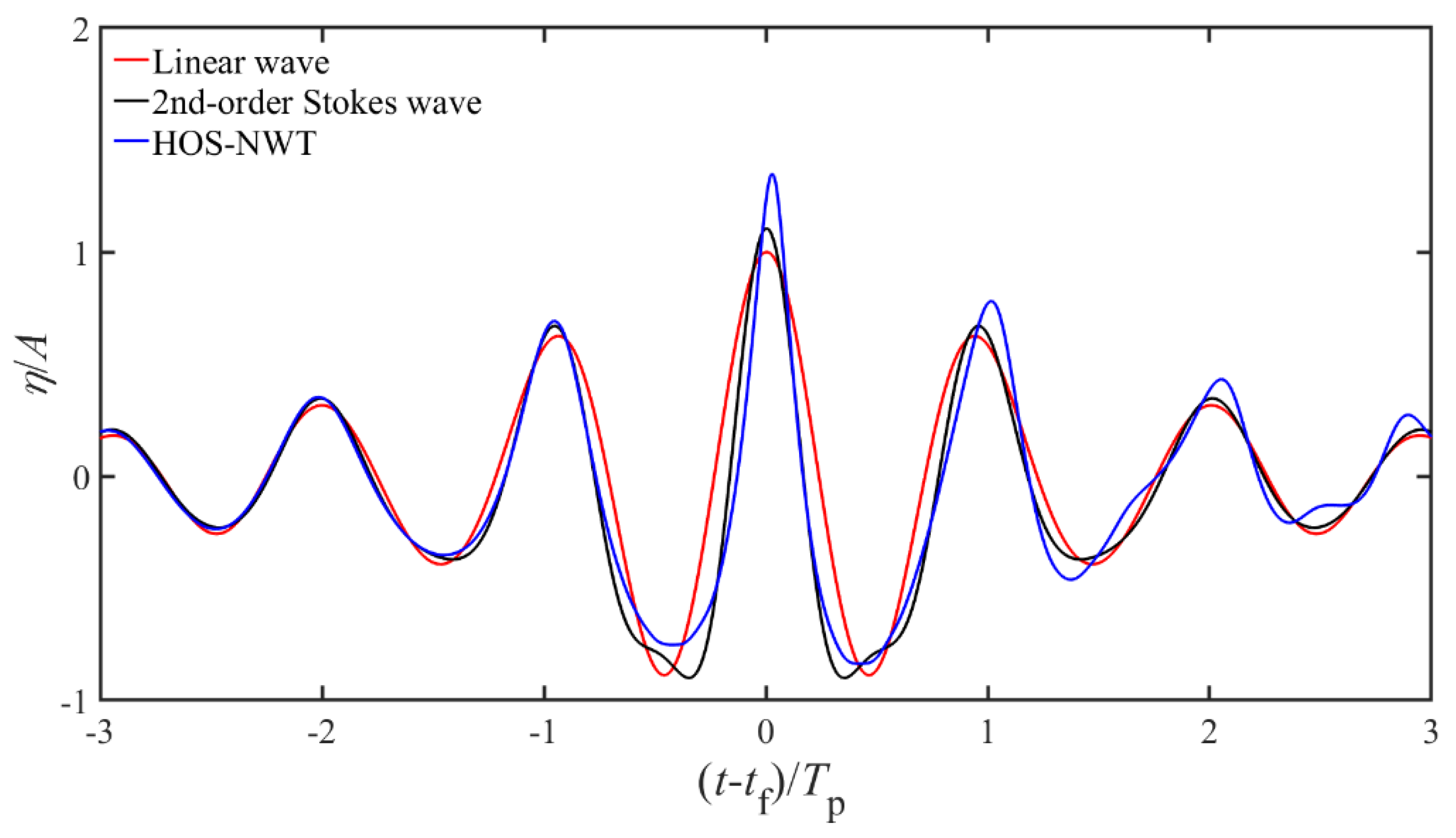
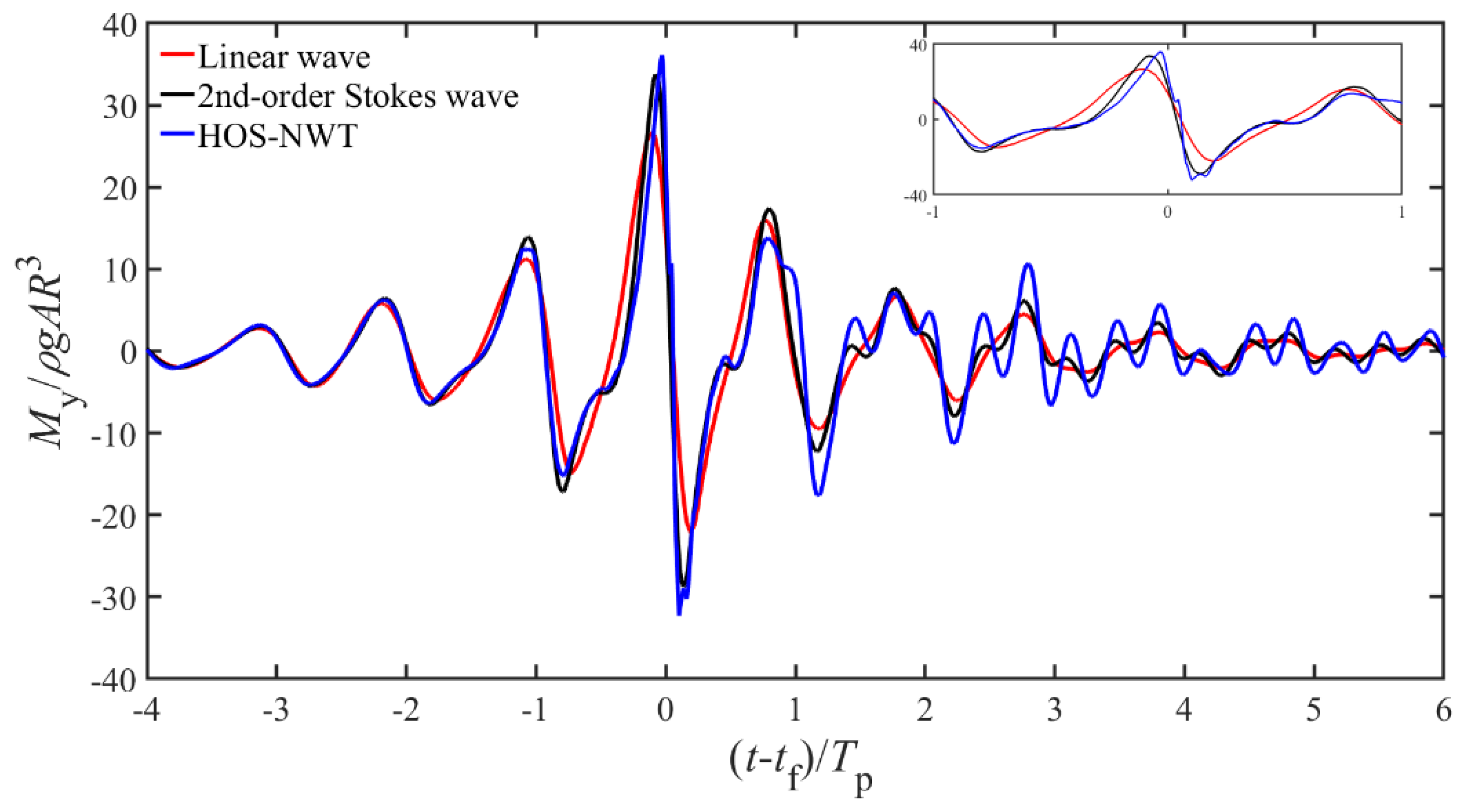
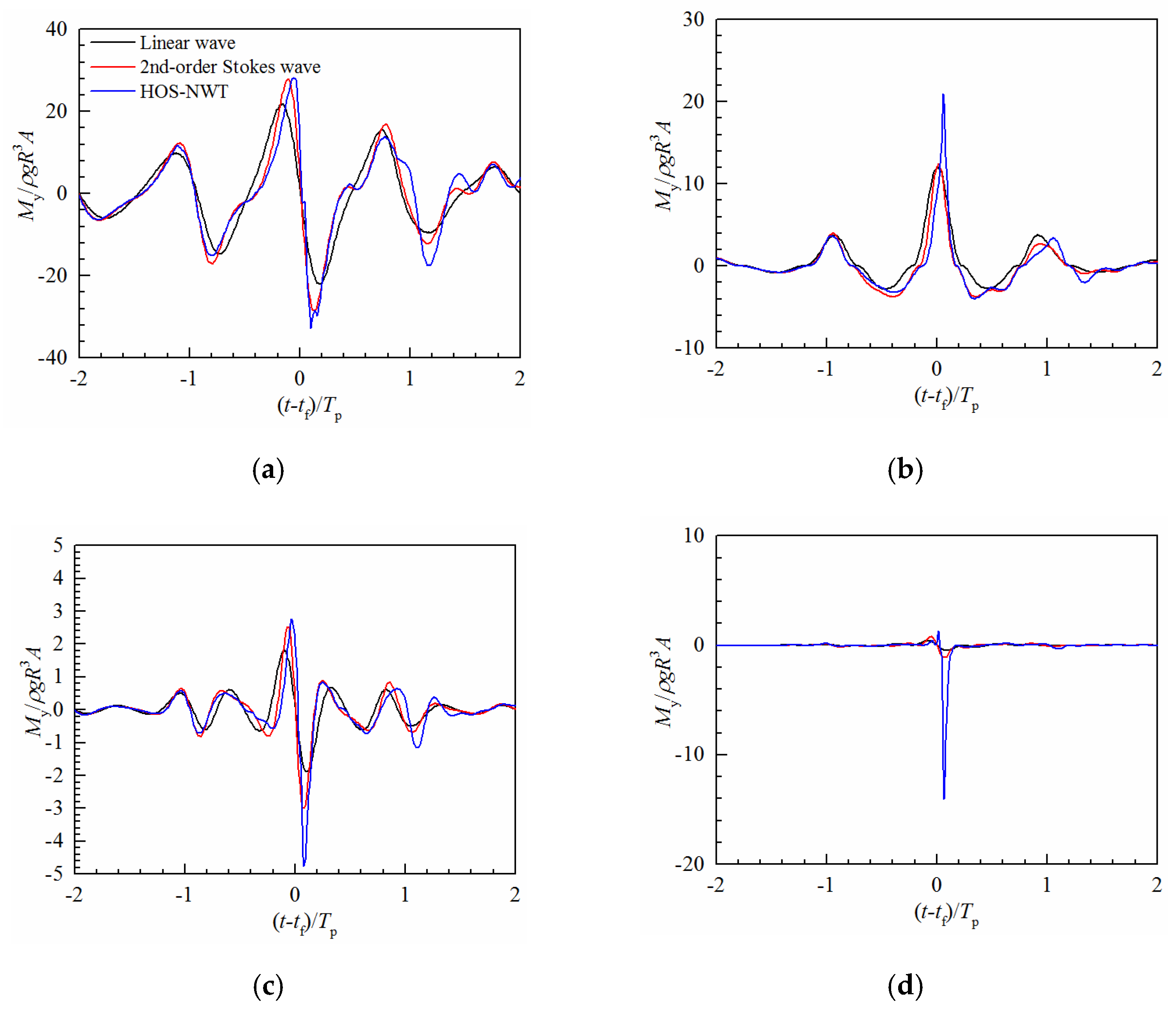
4.2. Different Wave Models for Wave Loads and Ringing Response
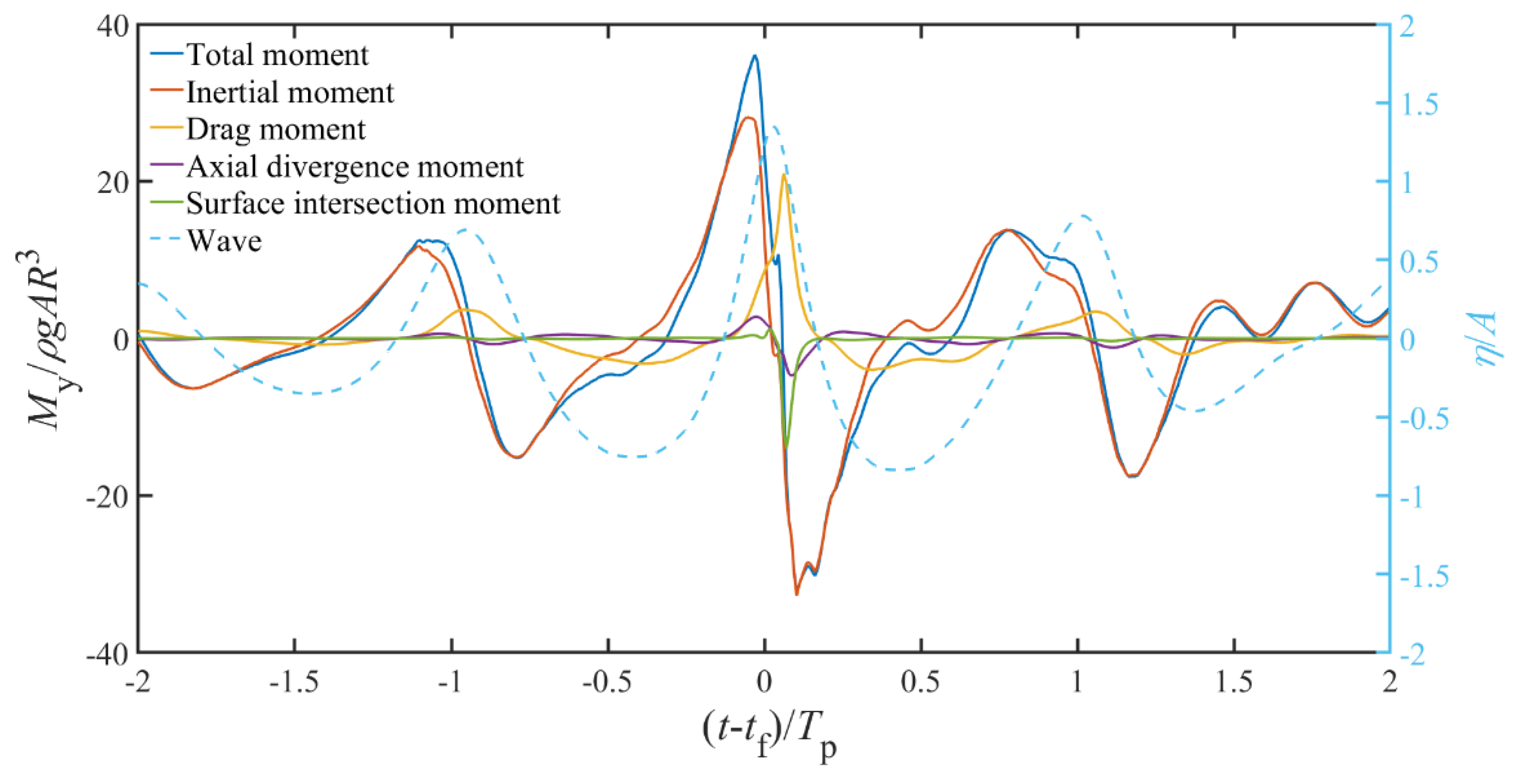
4.3. Different Hydrodynamic Models for Wave Loads and Ringing Response
5. Conclusions
- (1)
- The magnitude of the damping ratio has a slight influence on the peak wave loads and induced response. However, a larger damping ratio leads to a faster decay of the subsequent resonance response.
- (2)
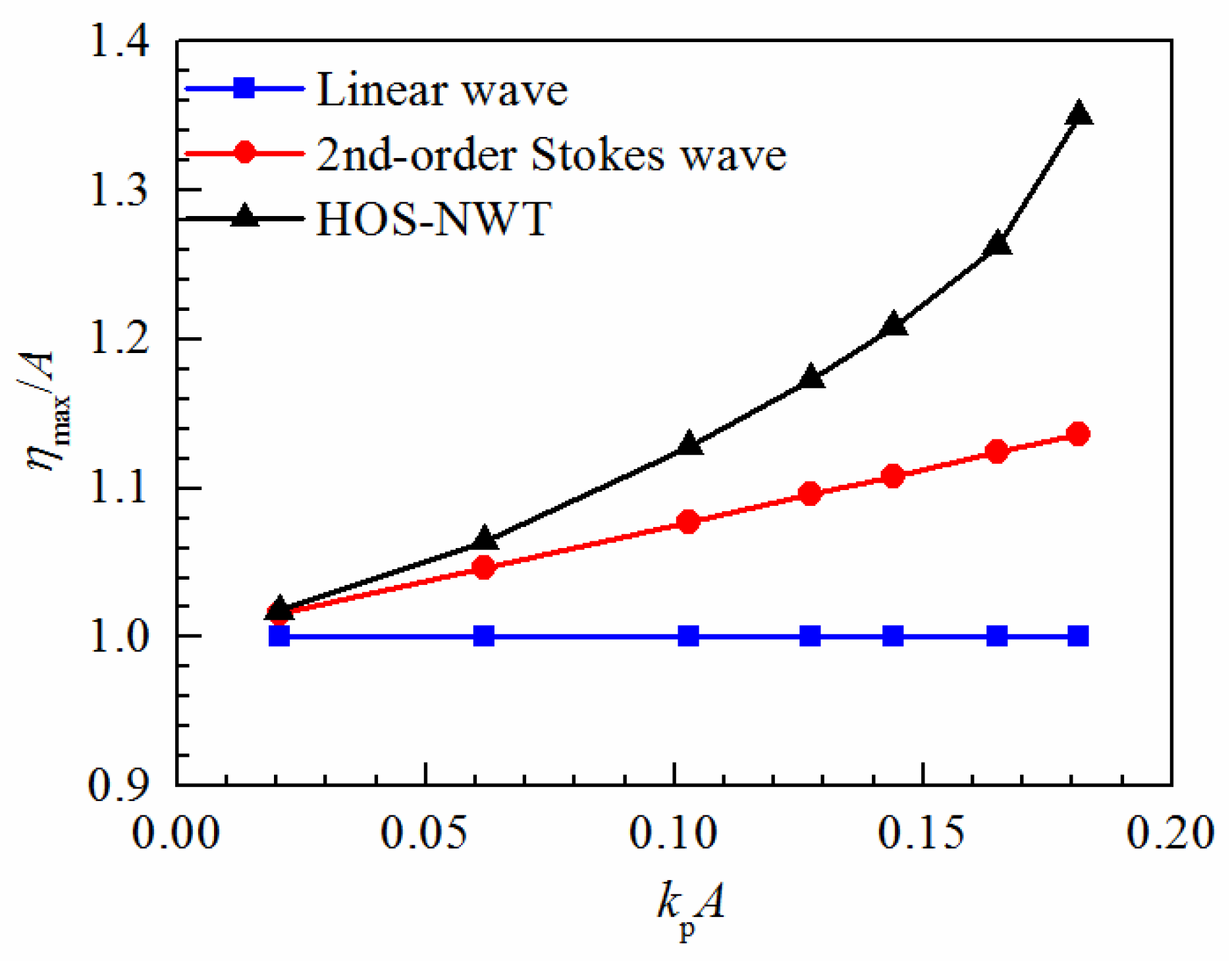
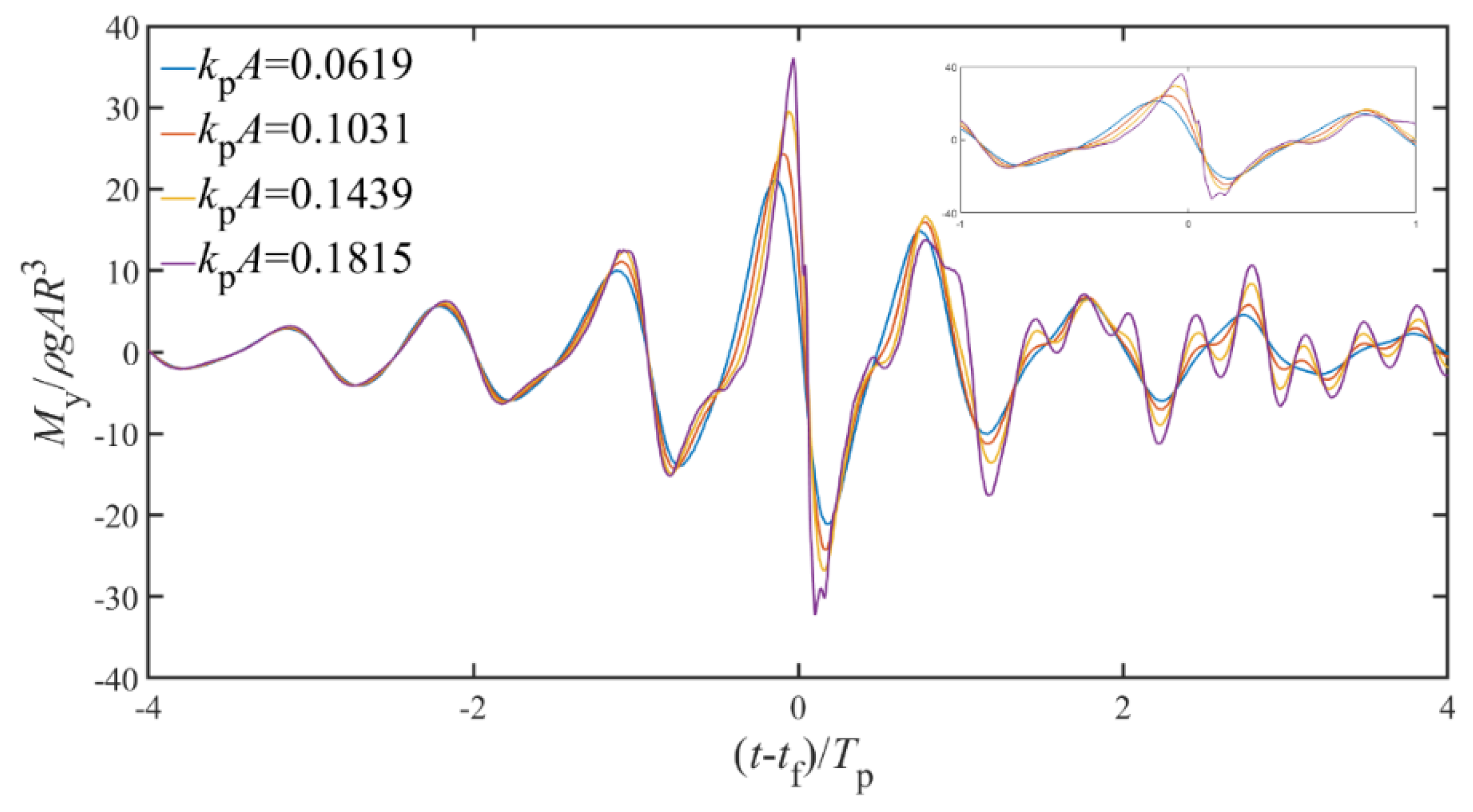
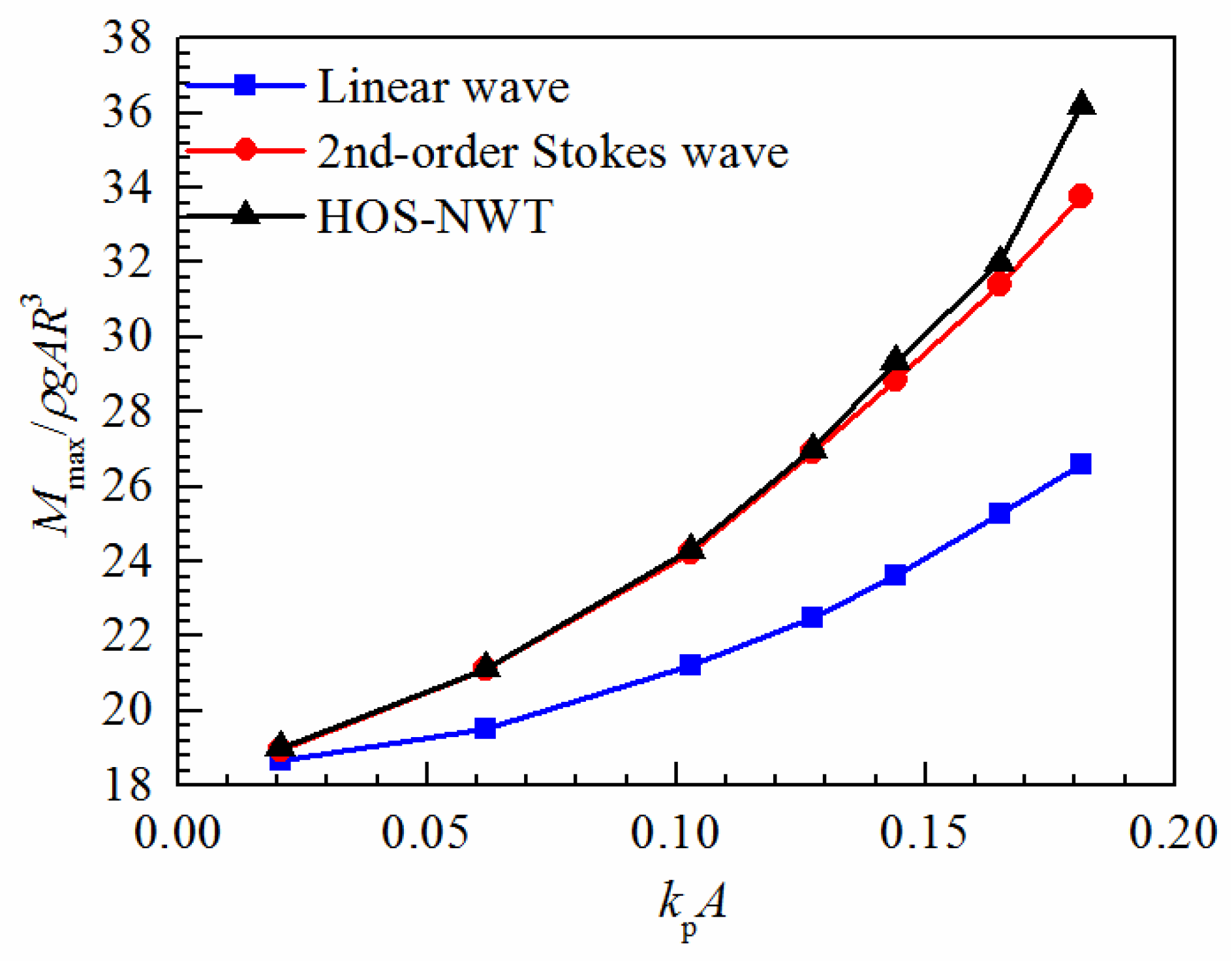
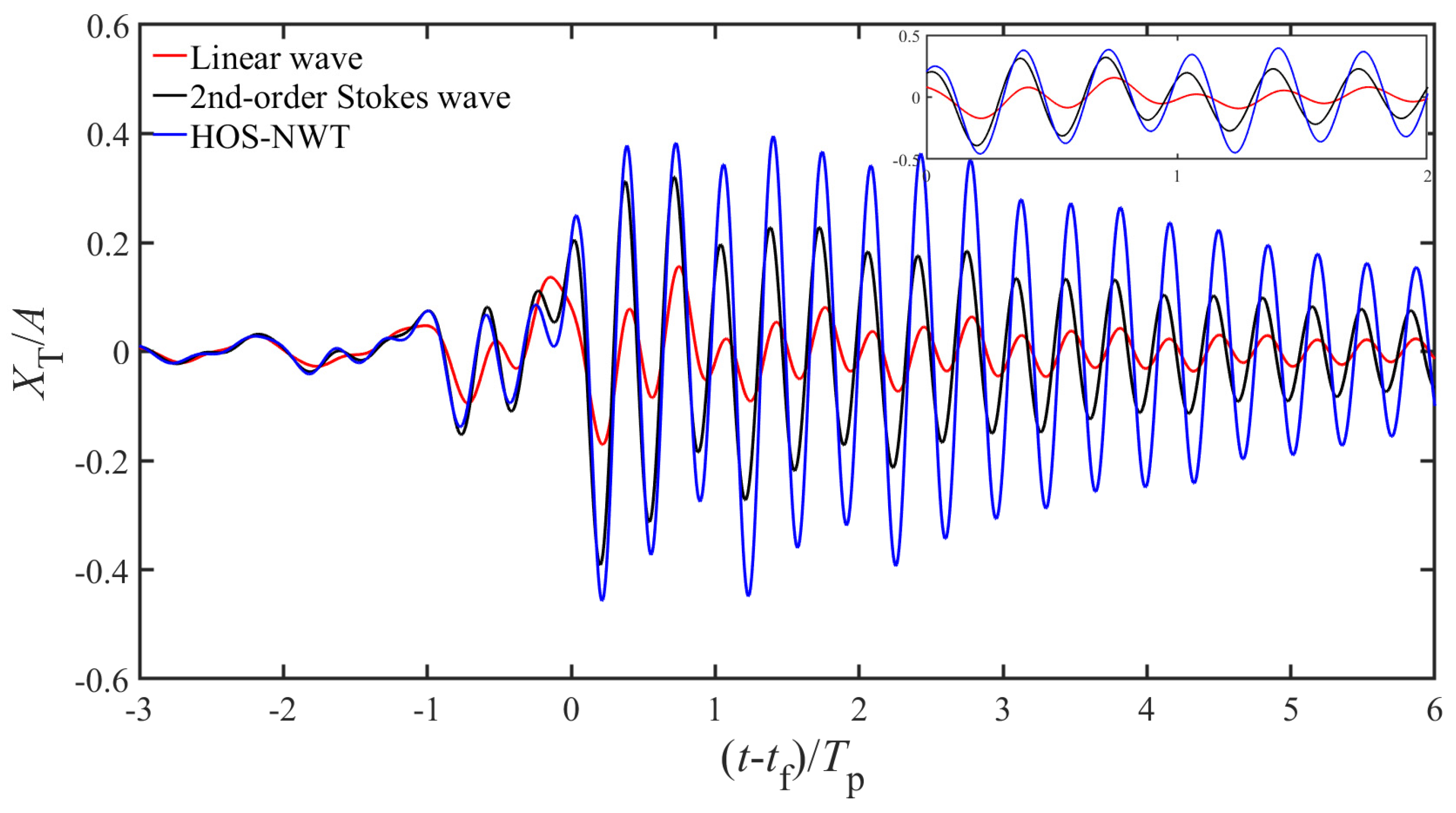
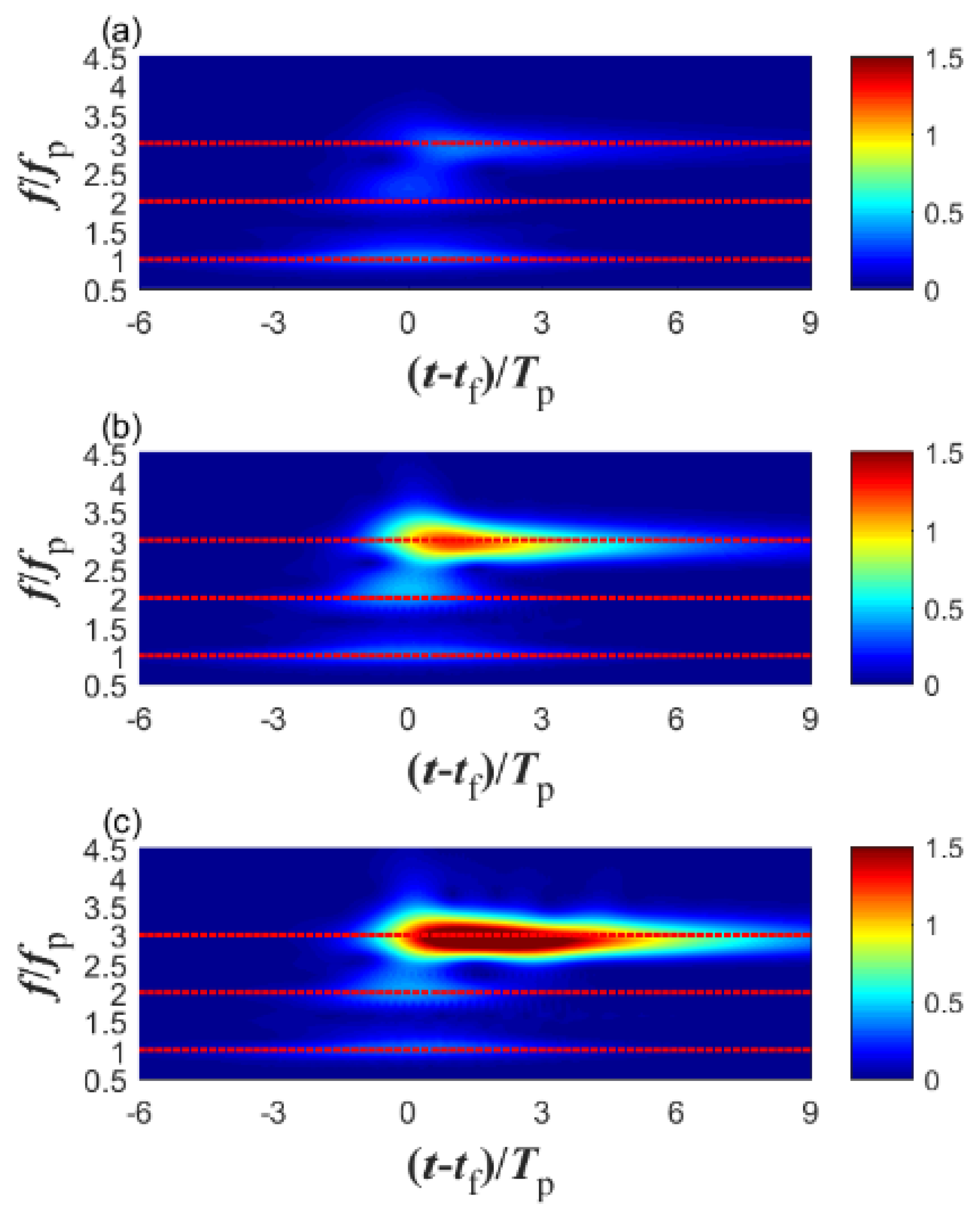
- Nonlinear wave models are important for the prediction of ultimate wave loads and induced responses. The prediction of peak wave loads using nonlinear wave models exceeds that using a linear wave model by a margin that increases rapidly with wave steepness. Although second-order wave theory performs well for ultimate loads, it performs worse for the prediction of the ringing response because the higher harmonics of the moment cannot be captured.
- (3)
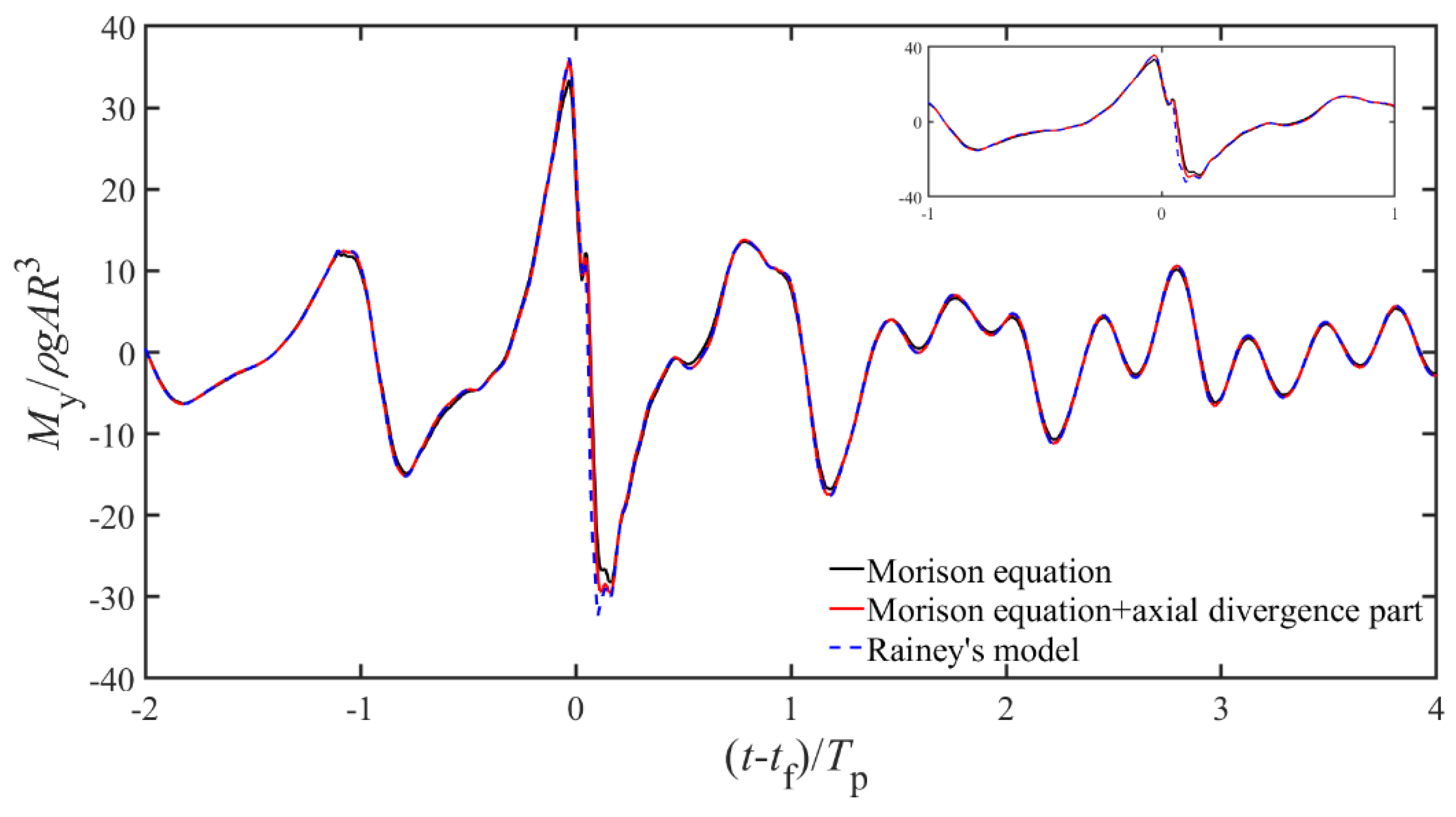
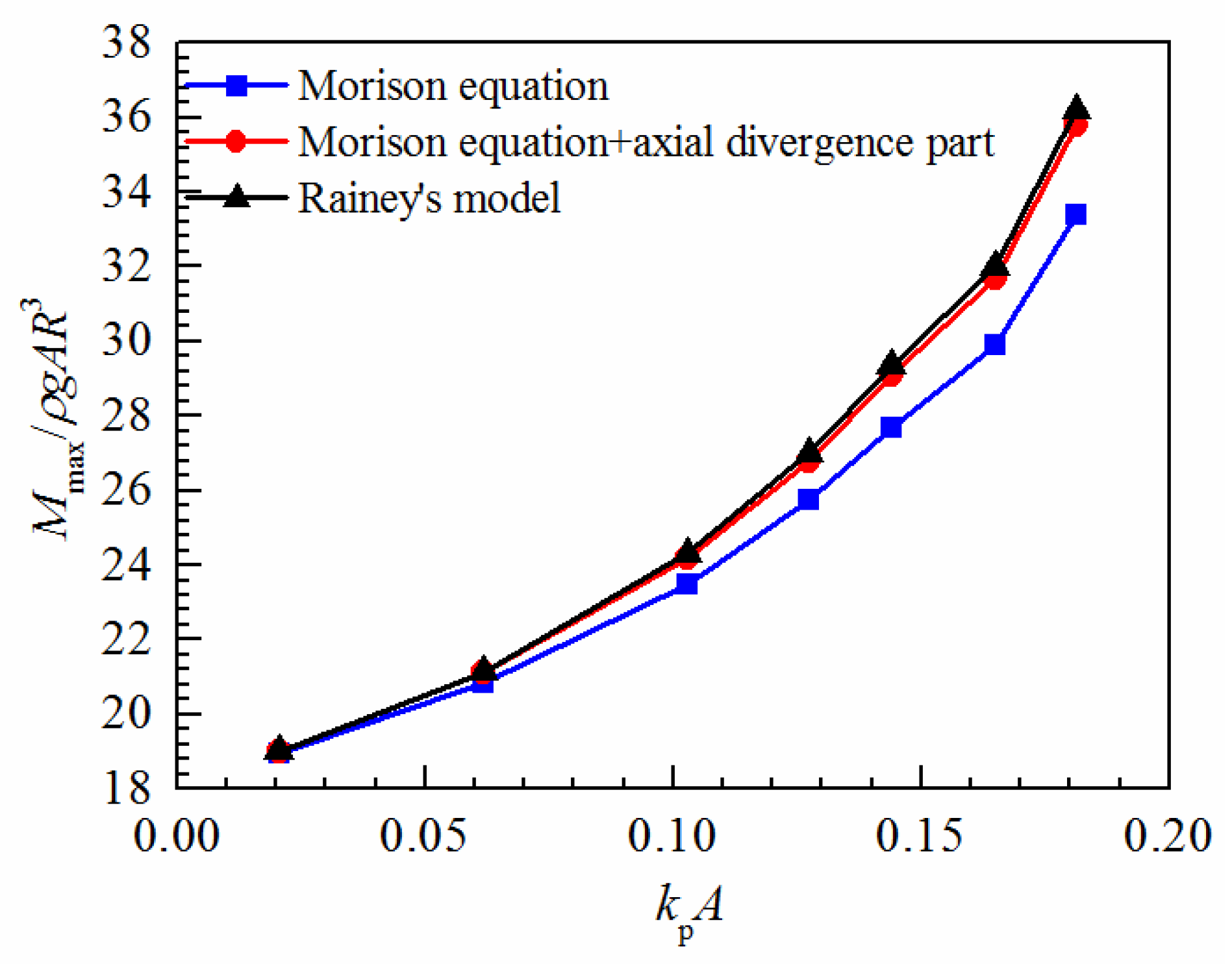
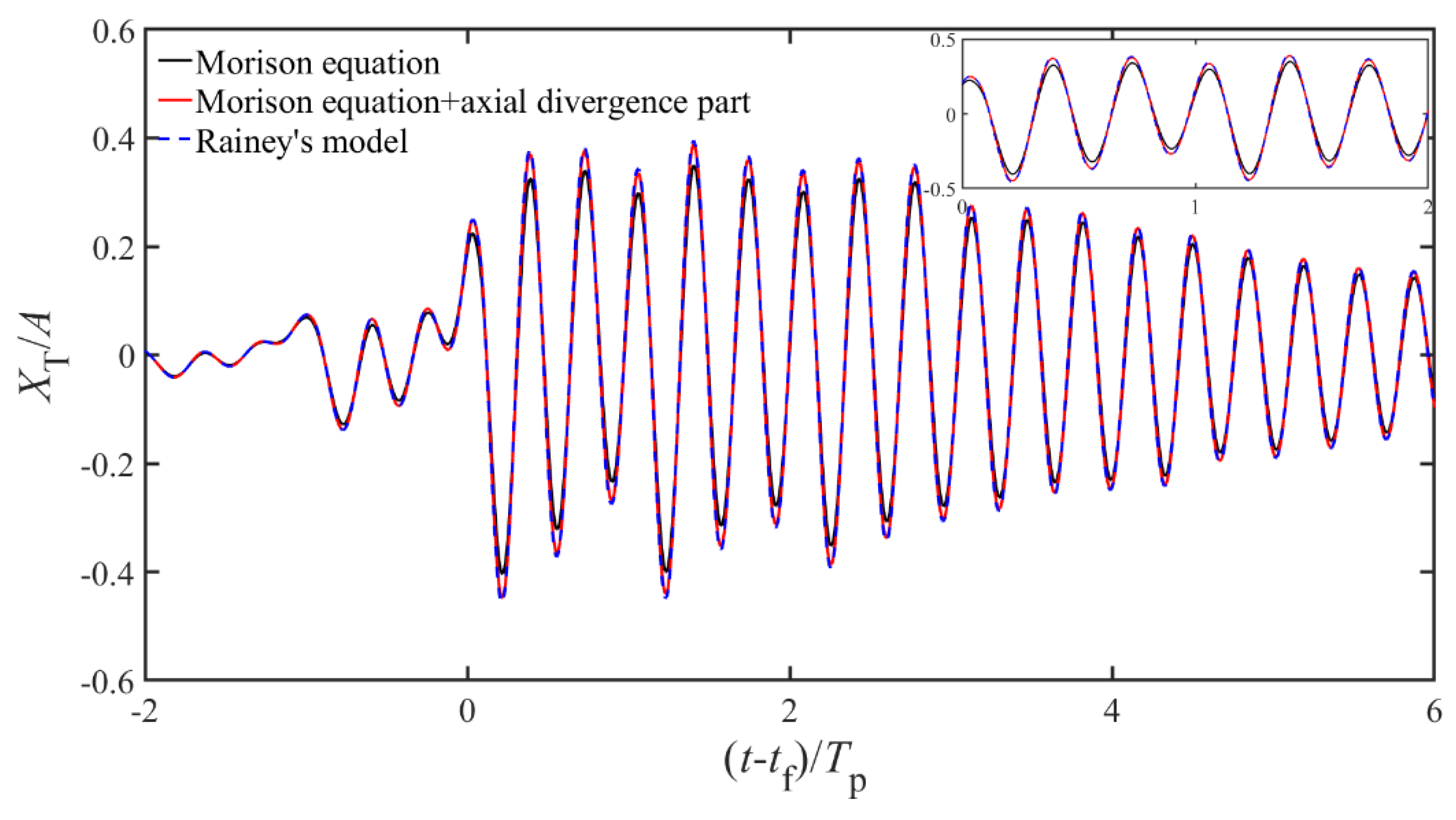
- Rainey’s model gives a larger peak sectional moment than the Morison equation because of slender-body corrections, which are essential for accurate prediction of the wave loads. As a result, a higher peak of the dimensionless top-point motion was observed. The discrepancies in the dimensionless peak moments between the two hydrodynamic models tend to increase with wave steepness.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ridder, E.J.D.; Aalberts, P.; Berg, J.V.D.; Buchner, B.; Peeringa, J. The dynamic response of an offshore wind turbine with realistic flexibility to breaking wave impact. In Proceedings of the ASME International Conference on Ocean, Offshore and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011. [Google Scholar]
- Natvig, B.J.; Teigen, P. Review of hydrodynamic challenges in TLP design. Int. J. Offshore Polar Eng. 1993, 3, 294–302. [Google Scholar]
- Bredmose, H.; Schløer, S.; Bo, T.P. Higher-harmonic response of a slender cantilever beam to fully nonlinear regular wave forcing. In Proceedings of the ASME International Conference on Ocean, Offshore and Arctic Engineering, Rio de Janeiro, Brazil, 1–6 July 2012. [Google Scholar]
- Atkins, N.; Lyons, R.; Rainey, R. Summary of Findings of Wave Load Measurements on the Tern Platform; HSE Books: London, UK, 1997. [Google Scholar]
- Rainey, R.C.T. A new equation for calculating wave loads on offshore structures. J. Fluid Mech. 1989, 204, 295–324. [Google Scholar] [CrossRef]
- Rainey, R.C.T. Slender-body expressions for the wave load on offshore structures. Proc. R. Soc. A Math. Phys. Eng. Sci. 1995, 450, 391–416. [Google Scholar]
- Manners, W.; Rainey, R.C.T. Hydrodynamic forces on fixed submerged cylinders. Proc. R. Soc. A Math. Phys. Eng. Sci. 1992, 436, 13–32. [Google Scholar]
- Tromans, P.S.; Anaturk, A.R.; Hagemeijier, P. A new model for the kinematics of large ocean waves-application as a design wave. In Proceedings of the First International Offshore and Polar Engineering Conference, Edinburgh, UK, 11–16 August 1991. [Google Scholar]
- Wang, W.; Kamath, A.; Pakozdi, C.; Bihs, H. Investigation of focusing wave properties in a numerical wave tank with a fully nonlinear potential flow model. J. Mar. Sci. Eng. 2019, 7, 375. [Google Scholar] [CrossRef] [Green Version]
- Zijlema, M.; Stelling, G.S.; Smit, P.B. SWASH: An operational public domain code for simulating wave fields and rapidly varied flows in coastal waters. Coast. Eng. 2011, 58, 992–1012. [Google Scholar] [CrossRef]
- Ducrozet, G.; Bonnefoy, F.; Touze, D.L.; Ferrant, P. A modified high-order spectral method for wavemaker modeling in a numerical wave tank. Eur. J. Mech. B Fluids 2012, 34, 19–34. [Google Scholar] [CrossRef]
- Vyzikas, T.; Stagonas, D.; Buldakov, E.; Greaves, D. The evolution of free and bound waves during dispersive focusing in a numerical and physical flume. Coast. Eng. 2018, 132, 95–109. [Google Scholar] [CrossRef]
- Vyzikas, T.; Stagonas, D.; Maisondieu, C.; Greaves, D. Intercomparison of three open-source numerical flumes for the surface dynamics of steep focused wave groups. Fluids 2021, 6, 9. [Google Scholar] [CrossRef]
- Dommermuth, D.G.; Yue, D.K.P. A high-order spectral method for the study of nonlinear gravity waves. J. Fluid Mech. 1987, 184, 267–288. [Google Scholar] [CrossRef]
- West, B.J.; Brueckner, K.A.; Janda, R.S.; Milder, D.M.; Milton, R.L. A new numerical method for surface hydrodynamics. J. Geophys. Res. 1987, 92, 11803–11824. [Google Scholar] [CrossRef]
- Ning, D.Z.; Zang, J.; Liu, S.X.; Eatock Taylor, R.E.; Teng, B.; Taylor, P.H. Free-surface evolution and wave kinematics for nonlinear uni-directional focused wave groups. Ocean Eng. 2009, 36, 1226–1243. [Google Scholar] [CrossRef]
- Dalzell, J.F. A note on finite depth second-order wave–wave interactions. Appl. Ocean Res. 1999, 21, 105–111. [Google Scholar] [CrossRef]
- Rienecker, M.M.; Fenton, J.D. A fourier approximation method for steady water waves. J. Fluid Mech. 1981, 104, 119–137. [Google Scholar] [CrossRef]
- Bonnefoy, F.; Touzé, D.L.; Ferrant, P. A fully-spectral 3d time-domain model for second-order simulation of wavetank experiments. Part a: Formulation, implementation and numerical properties. Appl. Ocean Res. 2006, 28, 33–43. [Google Scholar] [CrossRef]
- Bonnefoy, F.; Touzé, D.L.; Ferrant, P. A fully-spectral 3d time-domain model for second-order simulation of wavetank experiments. Part b: Validation, calibration versus experiments and sample applications. Appl. Ocean Res. 2006, 28, 121–132. [Google Scholar] [CrossRef] [Green Version]
- Goda, Y. A comparative review on the functional forms of directional wave spectrum. Coast. Eng. J. 1999, 41, 1–20. [Google Scholar] [CrossRef]
- Agnon, Y.; Bingham, H.B. A non-periodic spectral method with application to nonlinear water waves. Eur. J. Mech. B Fluids 1999, 18, 527–534. [Google Scholar] [CrossRef]
- Zakharov, V.E. Stability of periodic waves of finite amplitude on the surface of a deep fluid. J. Appl. Mech. Tech. Phys. 1968, 9, 190–194. [Google Scholar] [CrossRef]
- Cash, J.R.; Karp, A.H. A variable order Runge–Kutta method for initial value problems with rapidly varying right-hand sides. ACM Trans. Math. Softw. 1990, 16, 201–222. [Google Scholar] [CrossRef]
- Yamamoto, C.T.; Meneghini, J.R.; Saltara, F.; Fregonesi, R.A.; Ferrari, J.A. Numerical simulations of vortex-induced vibration on flexible cylinders. J. Fluids Struct. 2004, 19, 467–489. [Google Scholar] [CrossRef]
- Newmark, N.M. A method of computation for structural dynamics. J. Eng. Mech. ASCE 1959, 85, 67–94. [Google Scholar]
- Torrence, C.; Compo, G.P. A practical guide to wavelet analysis. Bull. Am. Meteorol. Soc. 1998, 79, 61–78. [Google Scholar] [CrossRef] [Green Version]
- Farge, M. Wavelet transforms and their applications to turbulence. Annu. Rev. Fluid Mech. 1992, 24, 395–458. [Google Scholar] [CrossRef]
- Kallehave, D.; Byrne, B.W.; LeBlanc Thilsted, C.; Mikkelsen, K.K. Optimization of monopiles for offshore wind turbines. Philos. Trans. R. Soc. Lond. A 2015, 373, 20140100. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Grue, J.; Huseby, M. Higher-harmonic wave forces and ringing of vertical cylinders. Appl. Ocean Res. 2002, 24, 203–214. [Google Scholar] [CrossRef]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case (Ning et al. [16]) | Frequency Band f (Hz) | Peak Frequency fp (Hz) | Input Amplitude AI (m) |
|---|---|---|---|
| 1 | 0.60 ≤ f ≤ 1.20 | 0.83 | 0.0313 |
| 2 | 0.60 ≤ f ≤ 1.30 | 0.83 | 0.0632 |
| Case | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| A (m) | 0.5 | 1.5 | 2.5 | 3.1 | 3.5 | 4 | 4.4 |
| kpA | 0.02062 | 0.06186 | 0.10310 | 0.12743 | 0.14393 | 0.16496 | 0.18145 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Teng, B. Higher-Harmonic Response of a Slender Monopile to Fully Nonlinear Focused Wave Groups. J. Mar. Sci. Eng. 2021, 9, 286. https://doi.org/10.3390/jmse9030286
Liu J, Teng B. Higher-Harmonic Response of a Slender Monopile to Fully Nonlinear Focused Wave Groups. Journal of Marine Science and Engineering. 2021; 9(3):286. https://doi.org/10.3390/jmse9030286
Chicago/Turabian StyleLiu, Jiawang, and Bin Teng. 2021. "Higher-Harmonic Response of a Slender Monopile to Fully Nonlinear Focused Wave Groups" Journal of Marine Science and Engineering 9, no. 3: 286. https://doi.org/10.3390/jmse9030286