
Investigation on Resistance, Squat and Ship-Generated Waves of Inland Convoy Passing Bridge Piers in a Confined Waterway


Abstract
:1. Introduction
2. Numerical and Experimental Details
2.1. Governing Equations Accounting for Solid Body Motions
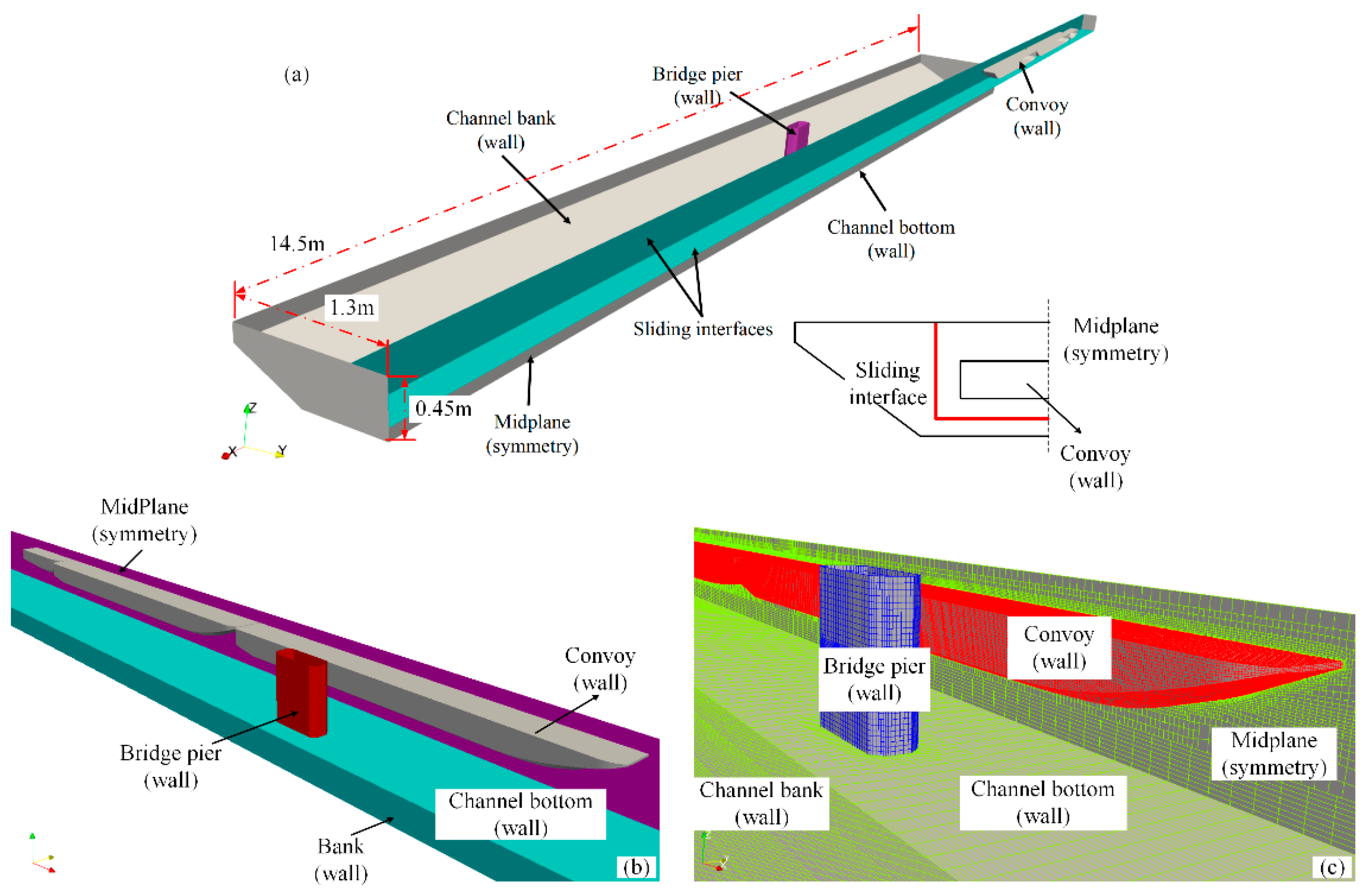
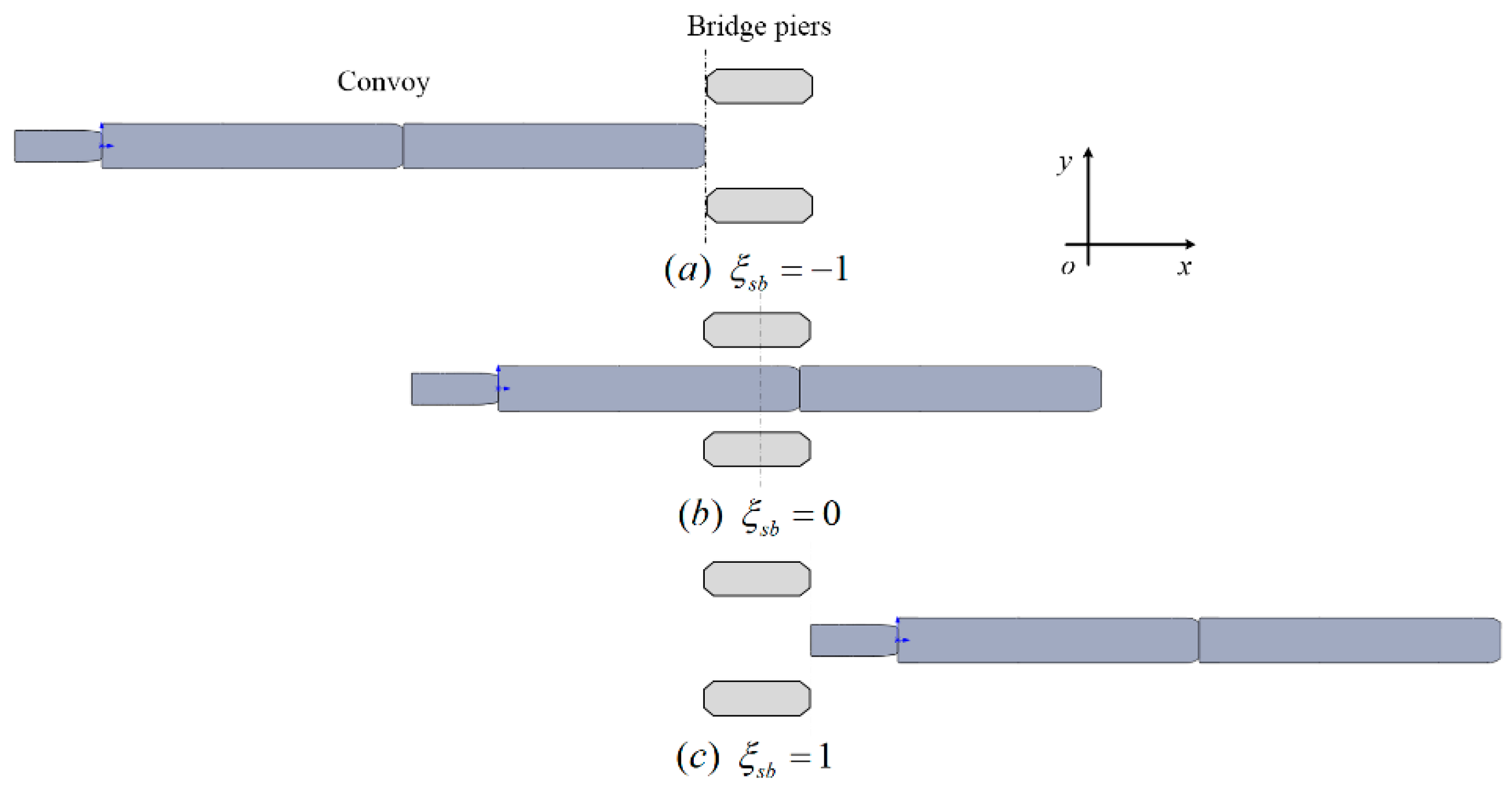
2.2. Testing Setups
3. Results and Discussions
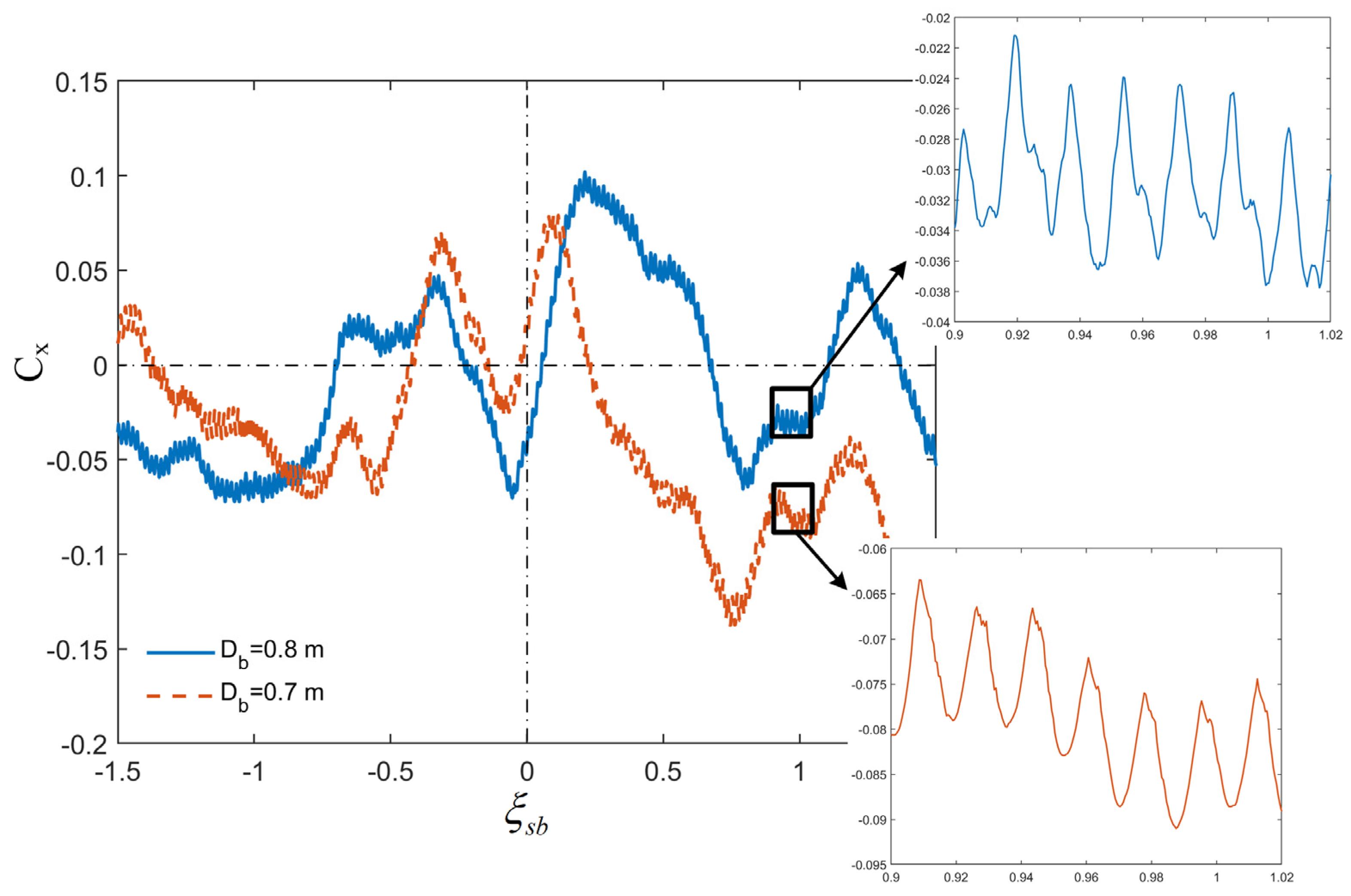
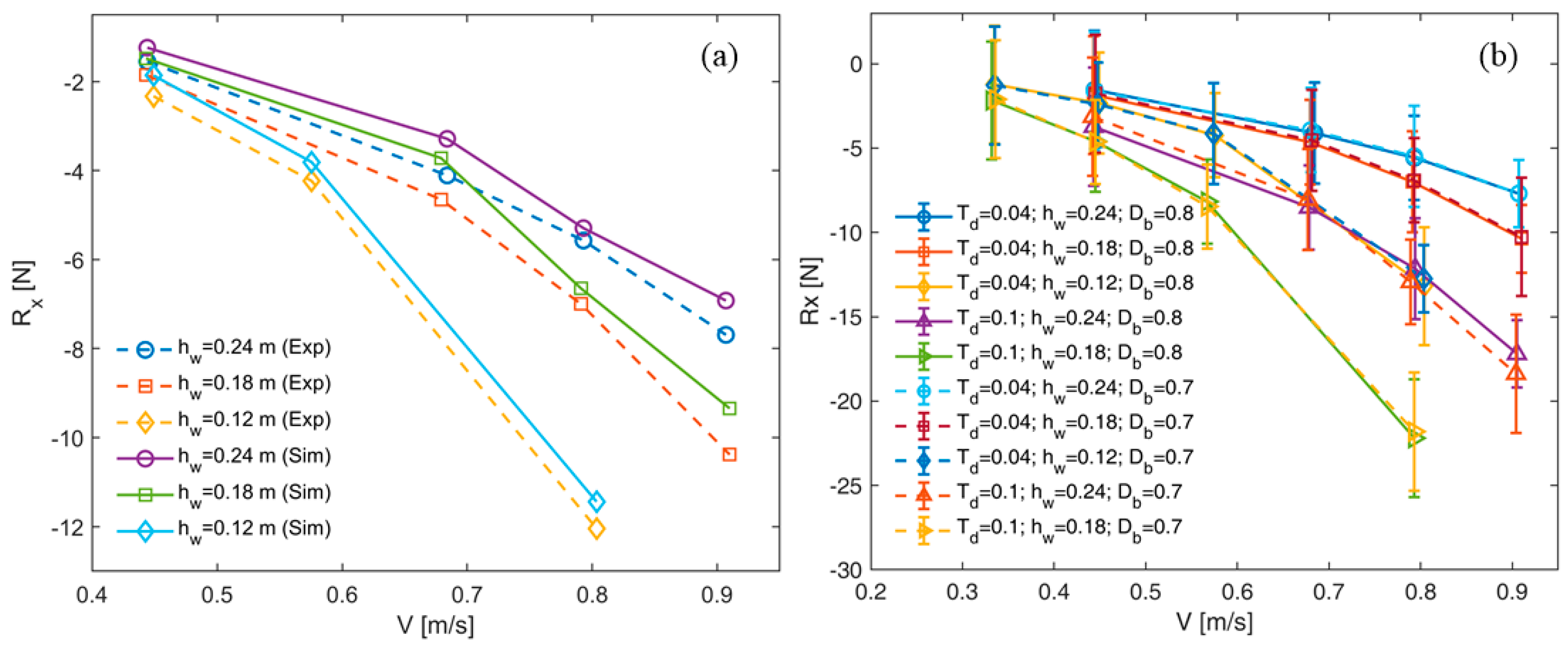
3.1. Advancing Resistance during the Convoy Passing Bridge Piers
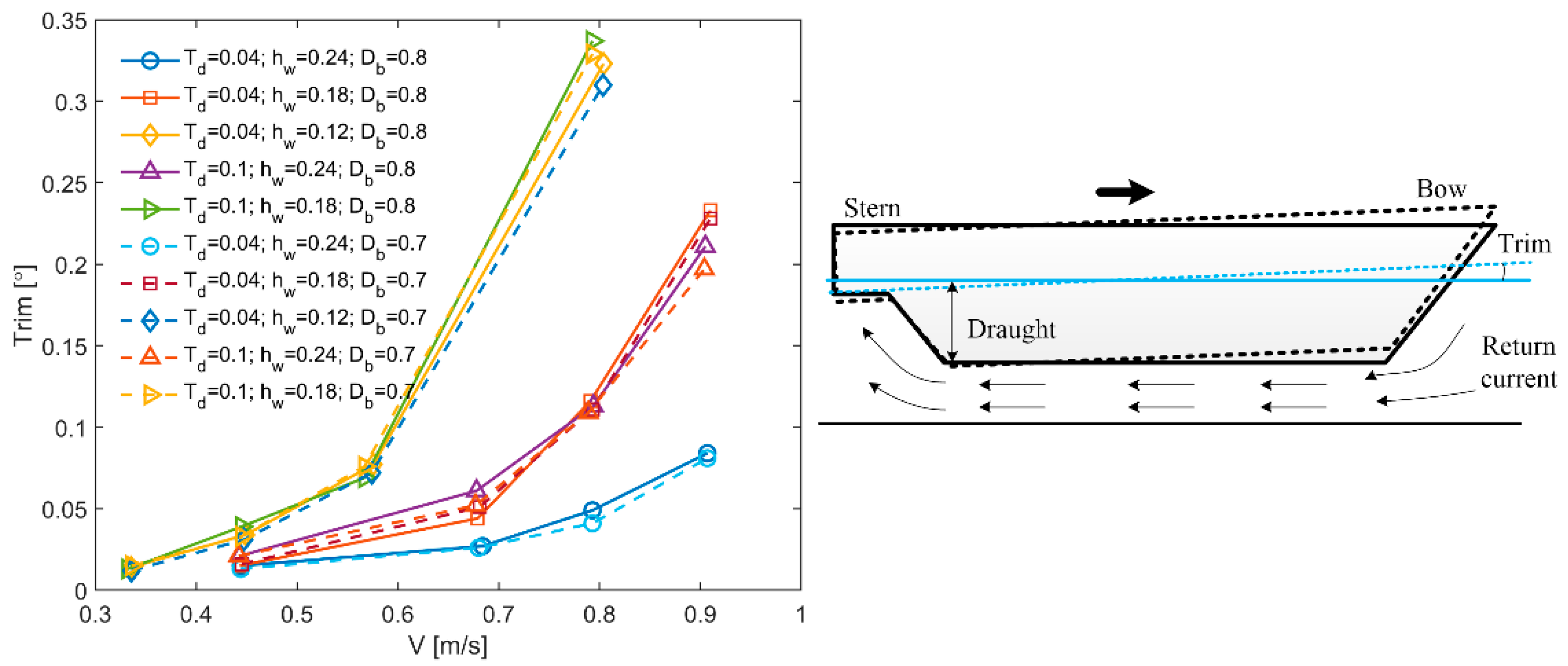
3.2. Trim and Sinkage Analysis
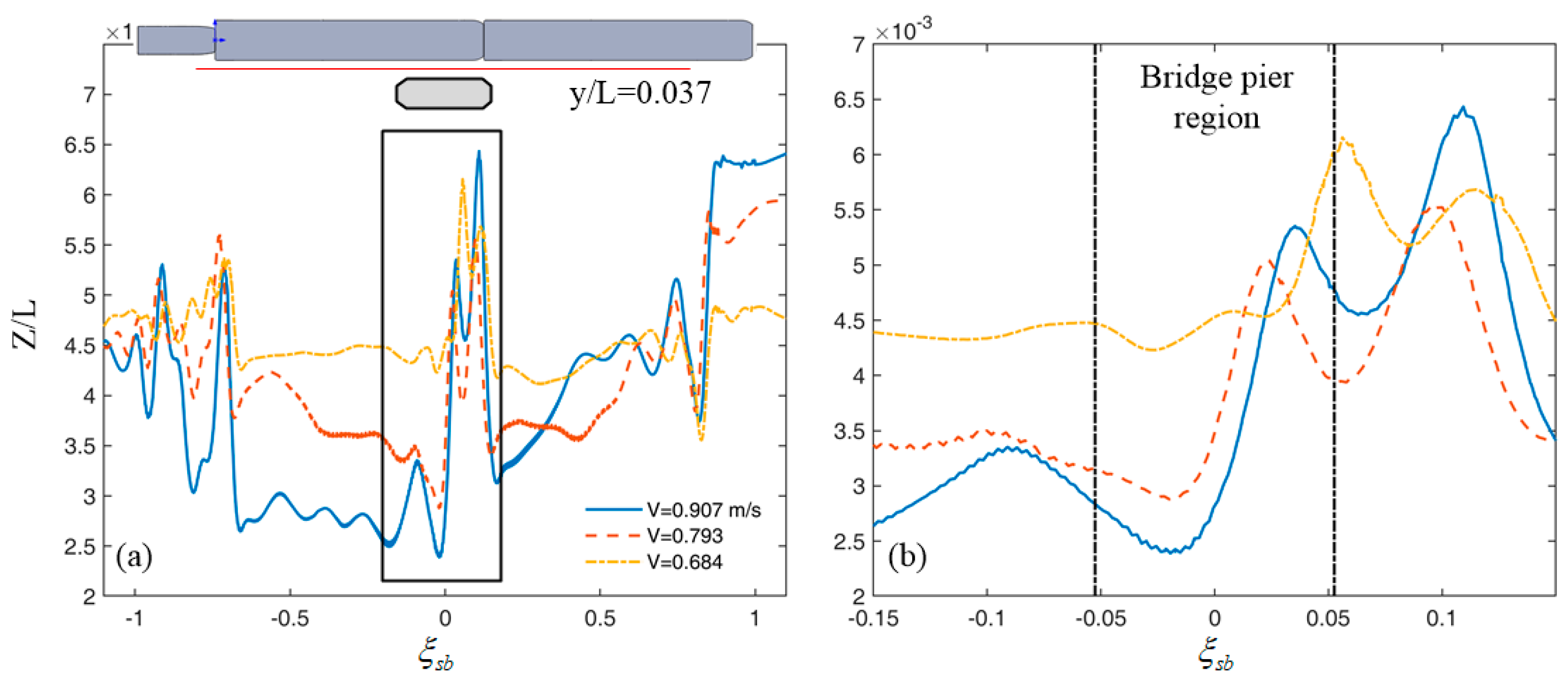
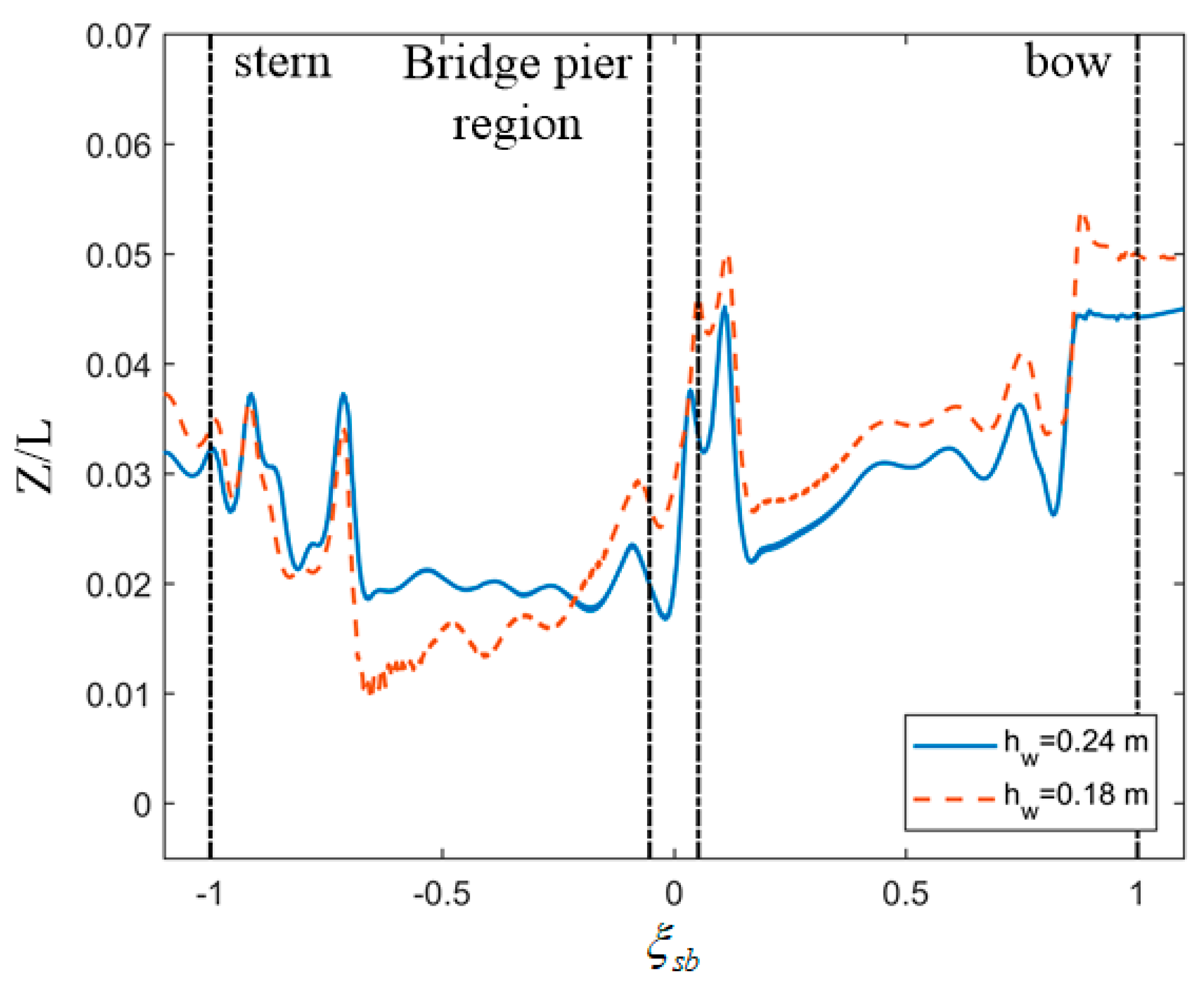
3.3. Ship-Generated Waves Influenced by Bridge Piers
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Xie, N.; Iglesias, G.; Hann, M.; Pemberton, R.; Greaves, D. Experimental study of wave loads on a small vehicle in close proximity to a large vessel. Appl. Ocean Res. 2019, 83, 77–87. [Google Scholar] [CrossRef]
- Xu, H.F.; Zou, L.; Zou, Z.J.; Yuan, Z.M. Numerical study on hydrodynamic interaction between two tankers in shallow water based on high-order panel method. Eur. J. Mech. B Fluids 2019, 74, 139–151. [Google Scholar] [CrossRef] [Green Version]
- Gourlay, T. Sinkage and trim of two ships passing each other on parallel courses. Ocean Eng. 2009, 36, 1119–1127. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Zou, L.; Wan, D. Numerical simulations of zigzag maneuver of free running ship in waves by rans-overset grid method. Ocean Eng. 2018, 162, 55–79. [Google Scholar] [CrossRef]
- Mousaviraad, S.M.; Sadat-Hosseini, S.H.; Carrica, P.M.; Stern, F. Ship–Ship interactions in calm water and waves. Part 2: URANS validation in replenishment and overtaking conditions. Ocean Eng. 2016, 111, 627–638. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.Z.; Zou, Z.J. Numerical study on hydrodynamic interaction between a berthed ship and a ship passing through a lock. Ocean Eng. 2014, 88, 409–425. [Google Scholar] [CrossRef]
- Wuttrich, R.; Wekezer, J.; Yazdani, N.; Wilson, C. Performance Evaluation of Existing Bridge Fenders for Ship Impact. J. Perform. Constr. Facil. 2001, 15, 17–23. [Google Scholar] [CrossRef]
- Wang, L.; Yang, L.; Tang, C.; Zhang, Z.; Chen, G.; Lu, Z. On the Impact Force and Energy Transformation in Ship-Bridge Collisions. Int. J. Prot. Struct. 2012, 3, 105–120. [Google Scholar] [CrossRef]
- Wang, L.; Yang, L.; Huang, D.; Zhang, Z.; Chen, G. An impact dynamics analysis on a new crashworthy device against ship-bridge collision. Int. J. Impact Eng. 2008, 35, 895–904. [Google Scholar] [CrossRef]
- Svensson, H. Protection of bridge piers against ship collision. Steel Constr. 2009, 2, 21–32. [Google Scholar] [CrossRef]
- Zhi-Qiang, H.; Yong-Ning, G.; Zhen, G.; Ya-Ning, L. Fast evaluation of ship-bridge collision force based on nonlinear numerical simulation. J. Mar. Sci. Appl. 2005, 4, 8–14. [Google Scholar] [CrossRef]
- Fan, W.; Liu, Y.; Liu, B.; Guo, W. Dynamic Ship-Impact Load on Bridge Structures Emphasizing Shock Spectrum Approximation. J. Bridg. Eng. 2016, 21, 04016057. [Google Scholar] [CrossRef]
- Proske, D.; Curbach, M. Risk to historical bridges due to ship impact on German inland waterways. Reliab. Eng. Syst. Saf. 2005, 90, 261–270. [Google Scholar] [CrossRef]
- Chu, L.M.; Zhang, L.M. Centrifuge Modeling of Ship Impact Loads on Bridge Pile Foundations. J. Geotech. Geoenvironmental Eng. 2011, 137, 405–420. [Google Scholar] [CrossRef]
- Xie, Z.; Zhang, Y.; Zhou, J.; Zhu, W. Theoretical and experimental research on the micro interface lubrication regime of water lubricated bearing. Mech. Syst. Signal Process. 2021, 151, 107422. [Google Scholar] [CrossRef]
- Xie, Z.; Zhu, W. An investigation on the lubrication characteristics of floating ring bearing with consideration of multi-coupling factors. Mech. Syst. Signal Process. 2022, 162, 108086. [Google Scholar] [CrossRef]
- Li, L.; Yuan, Z.-M.; Ji, C.; Li, M.-X.; Gao, Y. Investigation on the unsteady hydrodynamic loads of ship passing by bridge piers by a 3-D boundary element method. Eng. Anal. Bound. Elem. 2018, 94, 122–133. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Teng, B.; Liu, Z.; Zhang, L.W. Unsteady computation of hydrodynamic interaction forces and moments between ship hull and pier based on NURBS. J. Ship Mech. 2003, 7, 47–53. [Google Scholar]
- Li, Z.; Du, P.; Ouahsine, A.; Hu, H. Ship Hydrodynamics of Several Typical Scenes During Inland Waterway Transport. IOP Conf. Ser. Earth Environ. Sci. 2021, 697, 012003. [Google Scholar] [CrossRef]
- Guo, J.; Ai, W.Z.; Wang, J.H. The minimum distance between navigation ship and bridge. In Design, Manufacturing and Mechatronics: Proceedings of the 2015 International Conference on Design, Manufacturing and Mechatronics (ICDMM2015); World Scientific: Singapore, 2016; pp. 1447–1453. [Google Scholar]
- Khangaonkar, T.; Nugraha, A.; Wang, T. Hydrodynamic zone of influence due to a floating structure in a Fjordal Estuary-Hood Canal Bridge Impact Assessment. J. Mar. Sci. Eng. 2018, 6, 119. [Google Scholar] [CrossRef] [Green Version]
- Tan, Z.; Gan, L. Risk Assessment of Water Level Effect on Ship-Bridge Collision. In Proceedings of the 2008 International Symposium on Safety Science and Technology, Shanghai, China, 6–9 August 2008; pp. 290–293. [Google Scholar]
- Zhang, C.X.; Zou, Z.J.; Wang, H.M. Numerical prediction of the unsteady hydrodynamic interaction between a ship and a bridge pier. Chin. J. Hydrodynam. 2012, 27, 359–364. [Google Scholar]
- Xiang, X.; Eidem, M.E.; Sekse, J.H.; Minoretti, A. Hydrodynamic loads on a submerged floating tube bridge induced by a passing ship or two ships in maneuver in calm water. In International Conference on Offshore Mechanics and Arctic Engineering; American Society of Mechanical Engineers: New York, NY, USA, 2016; Volume 49989, p. V007T06A047. [Google Scholar]
- Zheng, G.D. Cross-sectional Curvature Method in Bridge Ship Impact Resistance Force Calculation. In Proceedings of the International Conference on Mechanics, Building Material and Civil Engineering (MBMCE), Guilin, China, 15–16 August 2015; pp. 893–898. [Google Scholar]
- Rusche, H. Computational Fluid Dynamics of Dispersed Two-Phase Flows at High Phase Fractions. Ph.D. Thesis, Imperial College London (University of London), London, UK, 2003. [Google Scholar]
- Jasak, H. Error Analysis and Estimation for the Finite Volume Method with Applications to Fluid Flows. Ph.D. Thesis, Imperial College London (University of London), London, UK, 1996. [Google Scholar]
- Pereira, F.; Eça, L.; Vaz, G. Verification and Validation exercises for the flow around the KVLCC2 tanker at model and full-scale Reynolds numbers. Ocean Eng. 2017, 129, 133–148. [Google Scholar] [CrossRef]
- Beaudoin, M.; Jasak, H. Development of a generalized grid interface for turbomachinery simulations with OpenFOAM. In Proceedings of the Open Source CFD International Conference, Berlin, Germany, 4 December 2008; Volume 2. [Google Scholar]
- Darwish, M.; Geahchan, W.; Moukalled, F. Fully implicit method for coupling multiblock meshes with nonmatching interface grids. Numer. Heat Transf. B Fundam. 2017, 71, 109–132. [Google Scholar] [CrossRef]
- Farrell, P.E.; Maddison, J.R. Conservative interpolation between volume meshes by local Galerkin projection. Comput. Methods Appl. Mech. Eng. 2011, 200, 89–100. [Google Scholar] [CrossRef]
- Linde, F.; Ouahsine, A.; Huybrechts, N.; Sergent, P. Three-dimensional numerical simulation of ship resistance in restricted waterways: Effect of ship sinkage and channel restriction. J. Waterw. Port Coast. Ocean Eng. 2017, 143, 06016003. [Google Scholar] [CrossRef]
- Kaidi, S.; Smaoui, H.; Sergent, P. Numerical estimation of bank-propeller-hull interaction effect on ship manoeuvring using CFD method. J. Hydrodyn. B 2017, 29, 154–167. [Google Scholar] [CrossRef]
- Du, P.; Ouahsine, A.; Hoarau, Y. Solid body motion prediction using a unit quaternion-based solver with actuator disk. Comptes Rendus Mécanique 2018, 346, 1136–1152. [Google Scholar] [CrossRef]
- Jiao, J.; Huang, S.; Soares, C.G. Numerical investigation of ship motions in cross waves using CFD. Ocean Eng. 2021, 223, 108711. [Google Scholar] [CrossRef]
- Jiao, J.; Huang, S. CFD simulation of ship seakeeping performance and slamming loads in bi-directional cross wave. J. Mar. Sci. Eng. 2020, 8, 312. [Google Scholar] [CrossRef]
- Yuan, Z.M.; Zhang, X.; Ji, C.Y.; Jia, L.; Wang, H.; Incecik, A. Side wall effects on ship model testing in a towing tank. Ocean Eng. 2018, 147, 447–457. [Google Scholar] [CrossRef] [Green Version]
- Pompée, P.J. About modelling inland vessels resistance and propulsion and interaction vessel-waterway key parameters driving restricted/shallow water effects. In Proceedings of the Smart Rivers 2015, Buenos Aires, Argentina, 7–11 September 2015. [Google Scholar]
- Barrass, C.B. The phenomena of ship squat. Int. Shipbuild. Prog. 1979, 26, 44. [Google Scholar] [CrossRef]
- Gourlay, T.P. A brief history of mathematical ship-squat prediction, focusing on the contributions of EO Tuck. J. Eng. Math. 2011, 70, 5–16. [Google Scholar] [CrossRef]
- Wang, J.; Wan, D. Cfd study of ship stopping maneuver by overset grid technique. Ocean Eng. 2020, 197, 106895. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | |||||||
|---|---|---|---|---|---|---|---|
| 1 | 1.44 | 0.7 | 0.04 | 0.12 | 0.80 | 0.738 | 1,284,531 |
| 2 | 0.18 | 0.91 | 0.685 | 1,423,626 | |||
| 3 | 0.24 | 0.91 | 0.593 | 1,426,806 | |||
| 4 | 0.1 | 0.18 | 0.80 | 0.602 | 1,340,223 | ||
| 5 | 0.24 | 0.91 | 0.593 | 1,437,711 | |||
| 6 | 0.8 | 0.04 | 0.12 | 0.80 | 0.738 | 1,278,281 | |
| 7 | 0.18 | 0.91 | 0.685 | 1,419,086 | |||
| 8 | 0.24 | 0.91 | 0.593 | 1,534,598 | |||
| 9 | 0.1 | 0.18 | 0.80 | 0.602 | 1,331,889 | ||
| 10 | 0.24 | 0.91 | 0.593 | 1,471,276 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, P.; Ouahsine, A.; Sergent, P.; Hoarau, Y.; Hu, H. Investigation on Resistance, Squat and Ship-Generated Waves of Inland Convoy Passing Bridge Piers in a Confined Waterway. J. Mar. Sci. Eng. 2021, 9, 1125. https://doi.org/10.3390/jmse9101125
Du P, Ouahsine A, Sergent P, Hoarau Y, Hu H. Investigation on Resistance, Squat and Ship-Generated Waves of Inland Convoy Passing Bridge Piers in a Confined Waterway. Journal of Marine Science and Engineering. 2021; 9(10):1125. https://doi.org/10.3390/jmse9101125
Chicago/Turabian StyleDu, Peng, Abdellatif Ouahsine, Philippe Sergent, Yannick Hoarau, and Haibao Hu. 2021. "Investigation on Resistance, Squat and Ship-Generated Waves of Inland Convoy Passing Bridge Piers in a Confined Waterway" Journal of Marine Science and Engineering 9, no. 10: 1125. https://doi.org/10.3390/jmse9101125