
Radial Basis Function Neural Network Sliding Mode Control for Ship Path Following Based on Position Prediction



Abstract
:1. Introduction
- (1)
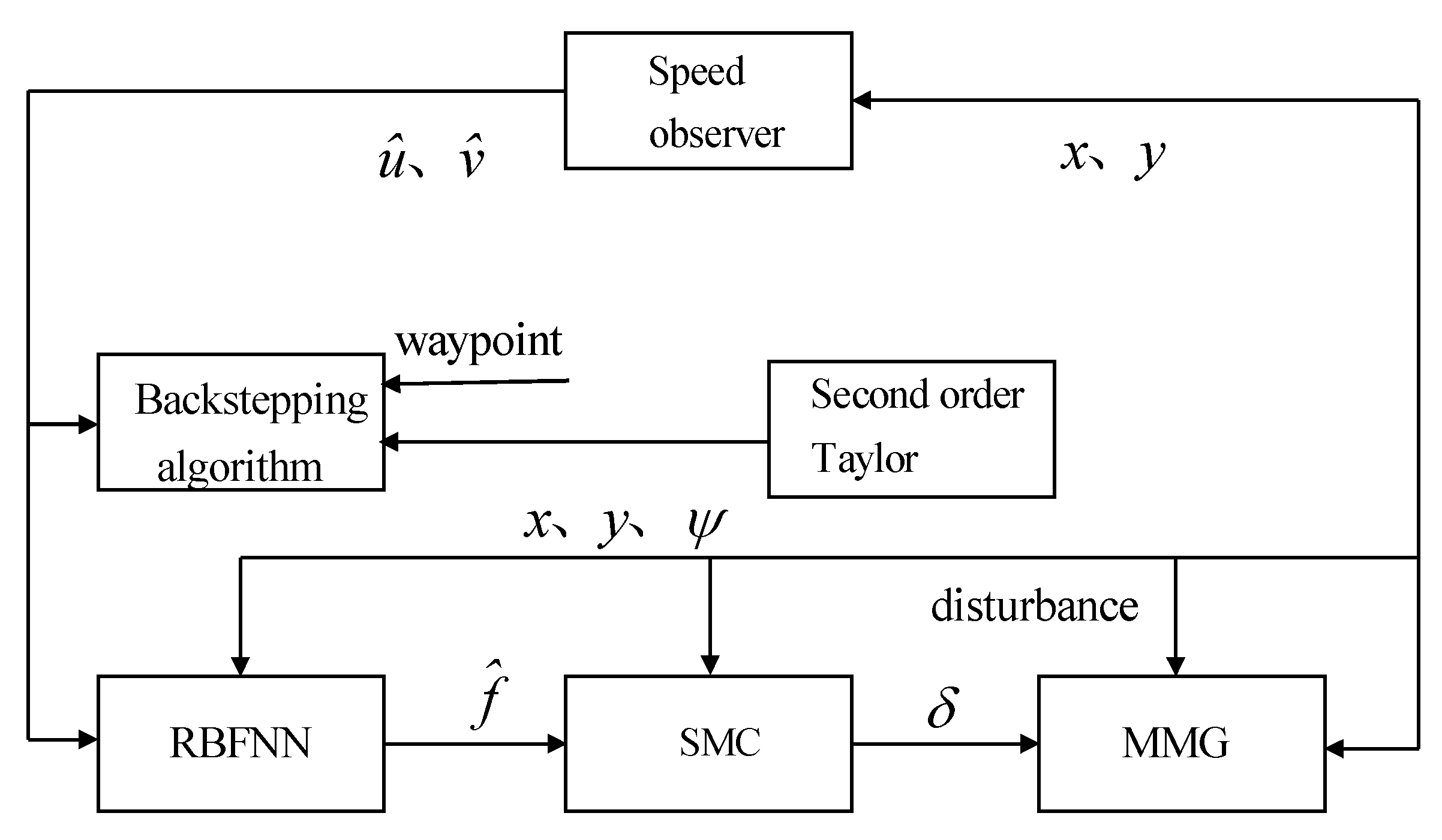
- Three-degree-of-freedom track tracking control is transformed into course control by the backstepping algorithm, and the future position is predicted by the second-order Taylor expansion method. The current error and future total error functions are constructed, and the errors are fed back to backstepping to form the desired heading angle in order to solve the problem of the inability to track the waypoint without overshoot in the process of following.
- (2)
- The RBF neural network and sliding mode control are combined to estimate unknown disturbance by the RBF neural network and feedback to the sliding mode controller to solve the external interference and the internal model uncertainty.
- (3)
- The nonlinear observer is used to obtain the velocity and solve the problem of unknown ship velocity.
2. Ship Motion Model
2.1. Simulation Model
2.2. Design Model
2.3. Wind and Wave Interference Model
2.4. Assumptions
- (1)
- The ship state values, , , and can be obtained.
- (2)
- The uncertainty f is bounded, that is || < .
- (3)
- The second derivative of displacements and is bounded, i.e., ||≤ , || < .
- (4)
- The motion of the ship in roll, pitch, and heave directions was neglected.
- (5)
- The ship had neutral buoyancy, and the origin of the body-fixed coordinate was located at the center of mass [35].
3. Path following Controller
3.1. Backstepping Algorithm
3.2. Design of RBF Neural Network Controller
3.3. Nonlinear Velocity Observer
4. Simulation Results
4.1. Comparative Experiment for Position Prediction
4.2. Comparative Experiment for Control Algorithm
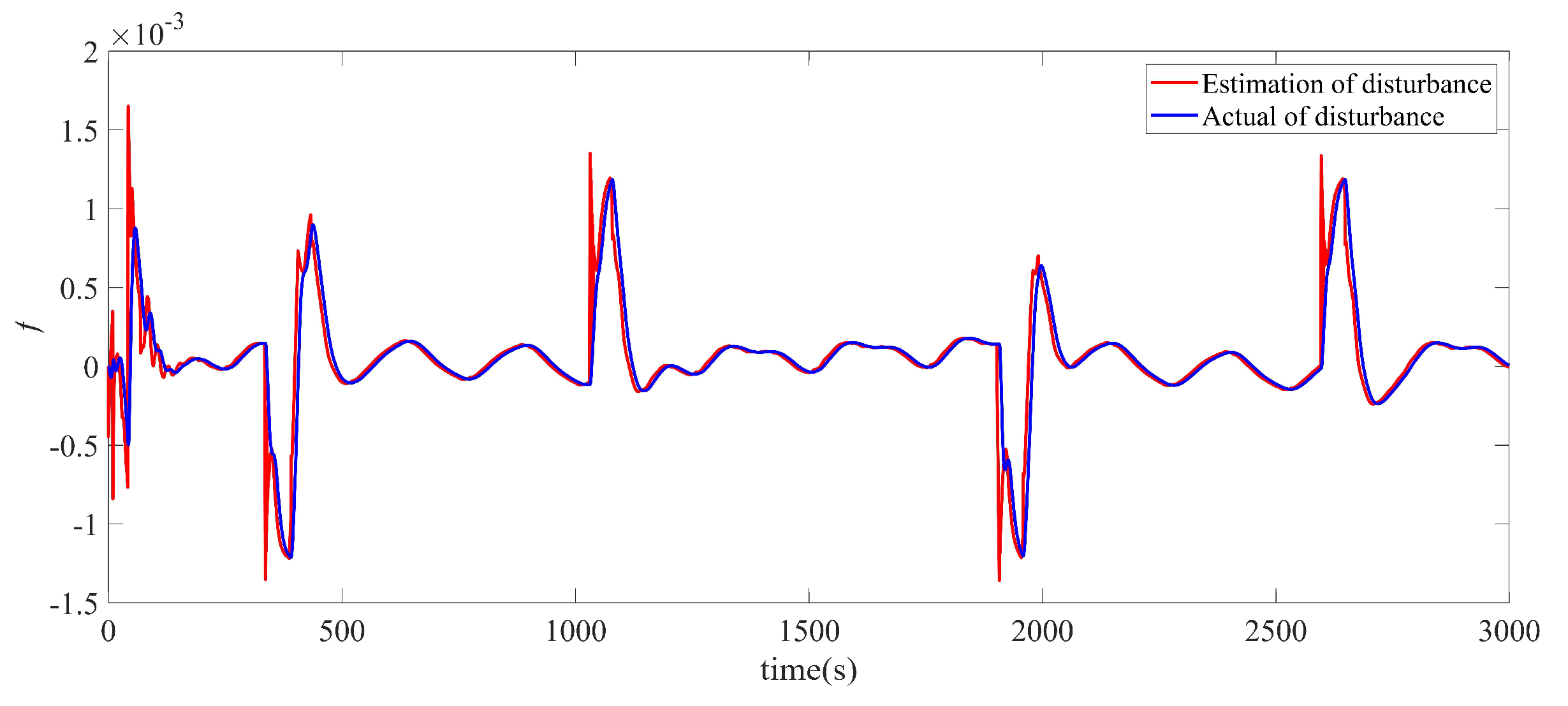
4.3. Verification of Effectiveness of Neural Network and Velocity Observer
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nagai, T.; Watanabe, R. Applying Position Prediction Model for Path Following of Ship on Curved Path. In Proceedings of the 2016 IEEE Region 10 Conference (TENCON), Singapore, 22–25 November 2016; pp. 3675–3678. [Google Scholar]
- Hu, X.; Wei, X.; Zhu, G.; Wu, D. Adaptive synchronization for surface vessels with disturbances and saturated thruster dynamics. Ocean Eng. 2020, 216, 107920. [Google Scholar] [CrossRef]
- Hu, X.; Wei, X.; Han, J.; Zhu, X. Adaptive Disturbance Estimation and Cancelation for Ships under Thruster Saturation. Int. J. Robust Nonlinear Control. 2020, 30, 5004–5020. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, X.; Bu, R. Active Disturbance Rejection Control of Ship Course Keeping Based on Nonlinear Feedback and ZOH Component. Ocean Eng. 2021, 233, 109136. [Google Scholar] [CrossRef]
- Vu, M.T.; Le Thanh, H.N.N.; Huynh, T.-T.; Thang, Q.; Duc, T.; Hoang, Q.-D.; Le, T.-H. Station-Keeping Control of a Hovering Over-Actuated Autonomous Underwater Vehicle Under Ocean Current Effects and Model Uncertainties in Horizontal Plane. IEEE Access 2021, 9, 6855–6867. [Google Scholar] [CrossRef]
- Vu, M.T.; Le, T.-H.; Thanh, H.L.N.N.; Huynh, T.-T.; Van, M.; Hoang, Q.-D.; Do, T.D. Robust Position Control of an Over-Actuated Underwater Vehicle under Model Uncertainties and Ocean Current Effects Using Dynamic Sliding Mode Surface and Optimal Allocation Control. Sensors 2021, 21, 747. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, X. Concise Robust Adaptive Path-Following Control of Underactuated Ships Using DSC and MLP. IEEE J. Ocean. Eng. 2014, 39, 685–694. [Google Scholar] [CrossRef]
- Peng, Z.; Wang, J.; Han, Q.-L. Path-Following Control of Autonomous Underwater Vehicles Subject to Velocity and Input Constraints via Neurodynamic Optimization. IEEE Trans. Ind. Electron. 2019, 66, 8724–8732. [Google Scholar] [CrossRef]
- Deng, Y. Model-Based Event-Triggered Tracking Control of Underactuated Surface Vessels With Minimum Learning Parameters. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 14. [Google Scholar] [CrossRef]
- Liu, C.; Negenborn, R.R.; Chu, X.; Zheng, H. Predictive Path Following Based on Adaptive Line-of-Sight for Underactuated Autonomous Surface Vessels. J. Mar. Sci. Technol. 2018, 23, 483–494. [Google Scholar] [CrossRef]
- Liu, L.; Wang, D.; Peng, Z.; Wang, H. Predictor-Based LOS Guidance Law for Path Following of Underactuated Marine Surface Vehicles with Sideslip Compensation. Ocean Eng. 2016, 124, 340–348. [Google Scholar] [CrossRef]
- Xu, H.; Fossen, T.I.; Guedes Soares, C. Uniformly Semiglobally Exponential Stability of Vector Field Guidance Law and Autopilot for Path-Following. Eur. J. Control 2020, 53, 88–97. [Google Scholar] [CrossRef]
- Perera, L.P.; Guedes Soares, C. Pre-Filtered Sliding Mode Control for Nonlinear Ship Steering Associated with Disturbances. Ocean Eng. 2012, 51, 49–62. [Google Scholar] [CrossRef]
- Fossen, T.I.; Breivik, M.; Skjetne, R. Line-of-Sight Path Following of Underactuated Marine Craft. IFAC Proc. Vol. 2003, 36, 211–216. [Google Scholar] [CrossRef]
- Lekkas, A.M.; Fossen, T.I. Integral LOS Path Following for Curved Paths Based on a Monotone Cubic Hermite Spline Parametrization. IEEE Trans. Contr. Syst. Technol. 2014, 22, 2287–2301. [Google Scholar] [CrossRef]
- Moreira, L.; Fossen, T.I.; Guedes Soares, C. Path Following Control System for a Tanker Ship Model. Ocean Eng. 2007, 34, 2074–2085. [Google Scholar] [CrossRef]
- Li, Z.; Li, R.; Bu, R. Path Following of Under-Actuated Ships Based on Model Predictive Control with State Observer. J. Mar. Sci. Technol. 2021, 26, 408–418. [Google Scholar] [CrossRef]
- Deng, Y.; Zhang, X.; Zhang, G. Line-of-Sight-Based Guidance and Adaptive Neural Path-Following Control for Sailboats. IEEE J. Ocean. Eng. 2020, 45, 1177–1189. [Google Scholar] [CrossRef]
- Kelasidi, E.; Liljeback, P.; Pettersen, K.Y.; Gravdahl, J.T. Integral Line-of-Sight Guidance for Path Following Control of Underwater Snake Robots: Theory and Experiments. IEEE Trans. Robot. 2017, 33, 610–628. [Google Scholar] [CrossRef] [Green Version]
- Qu, Y.; Xiao, B.; Fu, Z.; Yuan, D. Trajectory Exponential Tracking Control of Unmanned Surface Ships with External Disturbance and System Uncertainties. ISA Trans. 2018, 78, 47–55. [Google Scholar] [CrossRef] [PubMed]
- Borkowski, P.; Zwierzewicz, Z. Ship Course-Keeping Algorithm Based On Knowledge Base. Intell. Autom. Soft Comput. 2011, 17, 149–163. [Google Scholar] [CrossRef]
- Weng, Y.; Wang, N.; Guedes Soares, C. Data-Driven Sideslip Observer-Based Adaptive Sliding-Mode Path-Following Control of Underactuated Marine Vessels. Ocean Eng. 2020, 197, 106910. [Google Scholar] [CrossRef]
- Moreira, L.; Guedes Soares, C. Dynamic Model of Manoeuvrability Using Recursive Neural Networks. Ocean Eng. 2003, 30, 1669–1697. [Google Scholar] [CrossRef]
- Li, R.; Huang, J.; Pan, X.; Hu, Q.; Huang, Z. Path Following of Underactuated Surface Ships Based on Model Predictive Control with Neural Network. Int. J. Adv. Robot. Syst. 2020, 17. [Google Scholar] [CrossRef]
- Wang, D.; Huang, J. Neural Network Based Adaptive Dynamic Surface Control for Nonlinear Systems in Strict-Feedback Form. In Proceedings of the 40th IEEE Conference on Decision and Control (Cat. No.01CH37228), Orlando, FL, USA, 4–7 December 2001; pp. 3524–3529. [Google Scholar]
- Yu, Z.; Zhang, Y.; Liu, Z.; Qu, Y.; Su, C.-Y.; Jiang, B. Decentralized Finite-Time Adaptive Fault-Tolerant Synchronization Tracking Control for Multiple UAVs with Prescribed Performance. J. Frankl. Inst. 2020, 357, 11830–11862. [Google Scholar] [CrossRef]
- Yin, J.-C.; Perakis, A.N.; Wang, N. A Real-Time Ship Roll Motion Prediction Using Wavelet Transform and Variable RBF Network. Ocean Eng. 2018, 160, 10–19. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, C.; Li, J.; Zhang, X. Improved Composite Learning Path-Following Control for the Underactuated Cable-Laying Ship via the Double Layers Logical Guidance. Ocean Eng. 2020, 207, 107342. [Google Scholar] [CrossRef]
- Yin, J.; Zou, Z.; Xu, F. On-Line Prediction of Ship Roll Motion during Maneuvering Using Sequential Learning RBF Neural Networks. Ocean Eng. 2013, 61, 139–147. [Google Scholar] [CrossRef]
- Wang, Z.; Xu, H.; Xia, L.; Zou, Z.; Soares, C.G. Kernel-Based Support Vector Regression for Nonparametric Modeling of Ship Maneuvering Motion. Ocean Eng. 2020, 216, 107994. [Google Scholar] [CrossRef]
- Zhang, W.; Zou, Z.-J.; Deng, D.-H. A Study on Prediction of Ship Maneuvering in Regular Waves. Ocean Eng. 2017, 137, 367–381. [Google Scholar] [CrossRef]
- Li, R.; Jia, B.; Fan, S.; Pan, X. A Novel Active Disturbance Rejection Control with Hyperbolic Tangent Function for Path Following of Underactuated Marine Surface Ships. Meas. Control 2020, 53, 1579–1588. [Google Scholar] [CrossRef]
- Wang, J.; Zou, Z.; Wang, T. Path Following of a Ship Sailing in Restricted Waters Based on an Extended Updated-Gain High-Gain Observer. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Madrid, Spain, 17 June 2018; p. V07BT06A030. [Google Scholar]
- Xiaobin, Q.; Yong, Y.; Helong, S.; Xiaofeng, S.; Xiufeng, Z. Simulation System for Testing Ship Dynamic Positioning Control Algorithm. J. Syst. Simul. 2016, 28, 2028–2034. [Google Scholar]
- Vu, M.T.; Van, M.; Bui, D.H.P.; Do, Q.T.; Huynh, T.-T.; Lee, S.-D.; Choi, H.-S. Study on Dynamic Behavior of Unmanned Surface Vehicle-Linked Unmanned Underwater Vehicle System for Underwater Exploration. Sensors 2020, 20, 1329. [Google Scholar] [CrossRef] [PubMed] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Desired Waypoint | Coordinate |
|---|---|
| Waypoint 1 | (0,0) |
| Waypoint 2 | (2000,0) |
| Waypoint 3 | (4000,2000) |
| Waypoint 4 | (8000,2000) |
| Waypoint 5 | (10,000,4000) |
| Ship Initial States | Value |
|---|---|
| surge velocity u | 7.2 m/s |
| sway velocity v | 0 m/s |
| yaw rate r | 0 m/s |
| course | 0° |
| position coordinate (x,y) | (0,300) |
| Algorithm Types | MAE | MAC |
|---|---|---|
| The proposed algorithm | 3.82 m | 8.12 deg |
| The algorithm in [32] | 5.12 m | 9.07 deg |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Zhang, X.; Bu, R. Radial Basis Function Neural Network Sliding Mode Control for Ship Path Following Based on Position Prediction. J. Mar. Sci. Eng. 2021, 9, 1055. https://doi.org/10.3390/jmse9101055
Zhang H, Zhang X, Bu R. Radial Basis Function Neural Network Sliding Mode Control for Ship Path Following Based on Position Prediction. Journal of Marine Science and Engineering. 2021; 9(10):1055. https://doi.org/10.3390/jmse9101055
Chicago/Turabian StyleZhang, Hugan, Xianku Zhang, and Renxiang Bu. 2021. "Radial Basis Function Neural Network Sliding Mode Control for Ship Path Following Based on Position Prediction" Journal of Marine Science and Engineering 9, no. 10: 1055. https://doi.org/10.3390/jmse9101055