2.1. Description of the Problem
In order to investigate a ship’s hydrodynamic performance in waves by means of a towing tank test, it is generally required to use something like soft rope or a spring to restrict the ship’s slow-drift motions of surge, sway and yaw due to the waves.
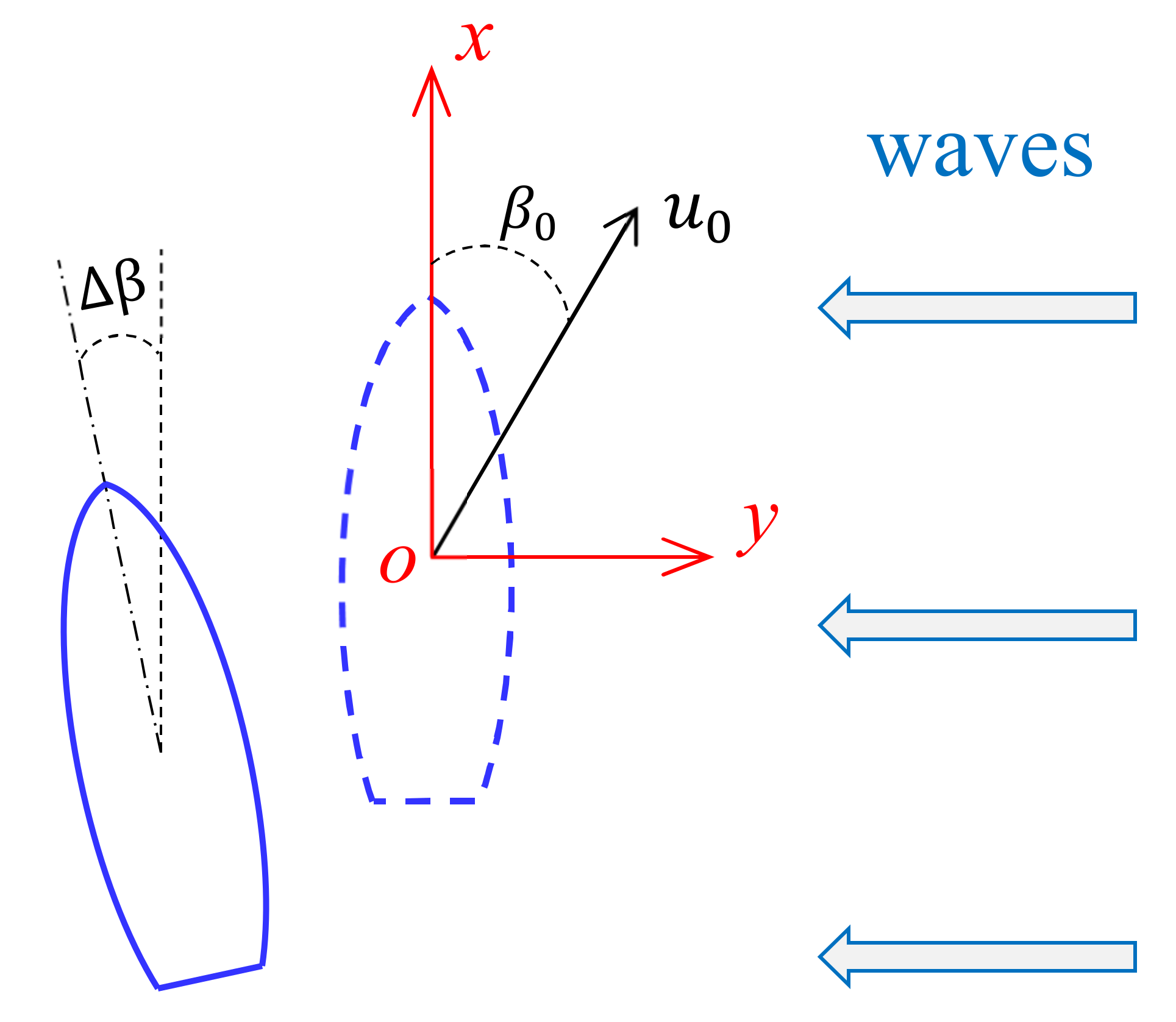
Figure 1 illustrates the situation of a ship model towed obliquely in regular beam waves. The oblique angle
is defined in the horizontal plane when the ship (shown by the dashed line in
Figure 1) is towed obliquely with a velocity of
in calm water. Due to the actions of both the waves and spring, the ship will oscillate periodically around a mean position in space. The mean position, e.g., the position of the ship shown by the solid line in
Figure 1, is determined by
,
, spring stiffness, wave length, wave height, and wave incident angle. In such a situation, the mean ship heading is different from the ship heading in calm water, and the mean oblique angle can be assumed as
, where
is caused by the spring and slow-drift effects of waves. Note that
is not zero when the ship moves obliquely, even in calm water, because the deformation of the spring system will occur, producing forces and moments which balance the hydrodynamic forces and moments acting on the ship. Therefore, the real oblique angle
in calm water is also a sum of
and
. It is the same thing for the wave incident angle. If the wave incident angle
is defined in the horizontal plane when the ship is at rest in calm water, the real-time incident wave angle
will change periodically as the ship oscillates in the waves, and the mean incident wave angle
is then
, where
is caused by the spring and slow-drift effects of waves as well.
For the problem of ship maneuvering in waves, we sometimes prefer to analyze maneuvering and seakeeping separately, although they are coupled in nature. The problem of maneuvering is regarded as a problem of low-frequency ship motion, whereas seakeeping is of high frequency, as mentioned above. It is necessary to separate these two kinds of forces, moments and ship motions, when analyzing them separately. For the situation shown in
Figure 1, because the ship oscillates periodically, the transient force or moment acting on the ship, as well as the transient ship motion, may be generally expressed in series form:
where
represents a general variable of force, moment or ship motion;
is wave encounter frequency, which should be understood as the mean encounter frequency; and
is natural frequency of the spring. The wave-induced component
contains the terms with the frequencies
, where
runs from 1 to
. The component
arises from the spring.
For ship maneuvering, the low-frequency forces and moments acting on the ship, as well as low-frequency motions, are usually of more concern. Note that is a transient variable. If we perform a time average operation to over an appropriate time interval, the components and can be completely filtered out, and it then results in . Obviously, is a constant of the zeroth order. It may be assumed that the frequency of is zero or its period is . Thus, or are of low frequency. For seakeeping, the wave-induced high-frequency component is more interesting. The interference of the spring is undesirable or even harmful to component analysis, as the components and will be disturbed by the spring, and do not include just the pure effects of the ship maneuvering motions and waves. In order to reduce the interference, must be far from , avoiding resonance. Certainly, the ship maneuvering motions, waves and spring will contribute to the components , and .
In this study, we attempt to compute the mean forces and moments, and the wave-induced 6DOF motions for the container ship S-175 moving obliquely in regular head and beam waves by employing the RANS technique based on OpenFOAM, as mentioned. The principal dimensions of S-175 are listed in
Table 1. All of the RANS computations are performed for a bare ship model 3.5 m long. The ship towing speed
is 0.879 m/s, corresponding to the Froude number
and the Reynolds number
. The oblique angles
considered are
,
,
and
. A few head and beam waves (five wave lengths and one wave amplitude) are taken into account. The non-dimensional wave lengths
are
, and the non-dimensional wave amplitude
is
, where
and
are defined by
and
respectively.
The above case setup accords with that in the experiment by Yasukawa [
12]. In addition, a virtual spring system consisting of one longitudinal spring and two transverse springs is attached to the ship model during RANS computations, according to the test conditions in the towing tank as well. The longitudinal spring with stiffness 529.2 N/m is attached at the center of gravity, and the two transverse springs with stiffness 313.6 N/m are attached at the positions 1.15 m and 1.22 m before and behind the center of gravity, respectively.
2.2. RANS Method
A right-handed Cartesian coordinate system in the horizontal plane is used to describe the flow around the ship. When the ship is at rest in calm water, the origin is positioned at the intersection of the mid-ship sections and the water’s surface, with the
-axis forward, the
-axis starboard, and the
-axis vertically downwards (see the coordinate system
-
shown in
Figure 1). Because the horizontal coordinate system is always fixed during RANS computations, in order to simulate the ship oblique motion, the uniform oblique flow relative to the ship is set on the far-field boundaries. However, the available method of dynamic grid deformation is used to allow the ship to perform 6DOF motions in space due to the actions of the waves and spring system.
Under the assumption of an incompressible Newtonian fluid, the conservation equations of mass (continuity equation) and momentum (RANS equation) can be expressed as
where
and
are independent Cartesian coordinates and flow velocity components, respectively;
is the fluid density;
is the kinematic viscosity coefficient;
is pressure; and
is the Reynolds stress tensor.
According to the Bousinesq hypothesis, the specific Reynolds stress is assumed to be
where
is the eddy viscosity;
is the turbulent kinetic energy; and
is the Kronecker symbol.
The
-
SST turbulence model [
13] is employed to approximate the eddy viscosity in Equation (4), where SST is the acronym of Shear-Stress-Transport, and
is the specific dissipation rate. The method of VOF (Volume of Fluid) is applied to capture the free surface of the water–air flow.
The computational domain is limited by a box, which ranges from
to
along the longitudinal direction, from
to
along the transverse direction, and from
to
along the vertical direction. Computational grids are generated by using the commercial software Hexpress.
Figure 2 presents a grid arrangement. The beam waves in the present consideration propagate from the starboard side to the port side. The longitudinal and transversal cell size is expanded downstream of the wave propagation, as seen in
Figure 2. The purpose of the cell size expansion is to reduce the cell number, and to dampen the wave amplitude downstream.
Because wall functions are employed to model the flow in the boundary layer, the spacing of the first grid point to the hull surface is justified to satisfy the use condition that the near-wall points locate in the log-layer (usually the dimensionless distance . is more than 30) after a few pre-computations. The present mean is around 80. For resistance, the ITTC (International Towing Tank Conference) committee of resistance recommends that should range from 30 to 300.
In this study, a new module of the wave boundary condition was programed into OpenFOAM. The method of prescribing flow values on the far domain boundaries is employed to generate waves in the computational domain. In the horizontal coordinate system, the freestream flow velocity in the far field is superposed by the uniform oblique flow velocity, i.e.,
, and the wave orbital velocity from the solution of the potential theory of linear waves. If freestream wave evaluation is expressed as
the velocity components of the freestream flow are
where
is the wave number and
is the natural frequency of the waves.
The four far boundaries at
,
and
,
are considered to be wave boundaries, on which the wave evaluation and flow velocities are specified by Equation (5) and Equations (6)–(8), respectively. In order to prevent wave reflection, relaxation zones adjacent to these boundaries are set up. A relaxation function
is applied inside the relaxation zones. The function expression [
14] is below.
where
is the relative distance, as illustrated in
Figure 3.
is always zero at the interface between the non-relaxed part of the computational domain and the relaxation zone, and 1 at the wave maker boundary.
varies from 0 to 1, depending on
.
During RANS computations, the wave evaluation and flow velocity in the relaxation zone are updated at each time step in the following way:
where
is either the flow velocity component or the wave evaluation;
is the value from RANS; and
is the freestream value prescribed by Equation (5) or Equations (6)–(8).
The bottom boundary at
is set as a free slip wall. The top boundary at
is set as a pressure outlet. The boundary types are listed in
Table 2.
The RANS solver in OpenFOAM is based on a finite volume technique which permits the use of arbitrary polyhedral grids, including hexahedron, tetrahedron, and prism, etc. A suite of basic discretization schemes and solution algorithms are available. In the present applications, a second-order upwind difference scheme (UDS) and a central difference scheme (CDS) are selected to approximate the convective terms and diffusive terms, respectively. A second-order backward scheme is applied for time discretization. Turbulence is discretized with the second-order UDS. The systems of linear equations resulting from the discretization are solved by using iterative solvers, which here are Gauss-Seidel relaxation for the velocity, k and ω, and a Generalized Geometric Multi-Grid (GAMG) for pressure. The PIMPLE algorithm, which merges the PISO (Pressure Implicit with Splitting of Operators) and SIMPLE (Semi-Implicit Method for Pressure-Linked Equations) algorithms, is applied to couple the mass and momentum equations. More details about boundary conditions and numerical settings can be found in the previous publication by Yao et al. [
15].
Besides this, in order to improve the numerical stability, the virtual wave maker is inactivated at the beginning, i.e., in calm-water conditions, until it reaches a steady flow. The calm-water simulation lasts for 100 s. Afterwards, the wave generation starts. For each case, around 2000 time steps per encounter period are performed, and ten outer-loop iterations are carried out during each time step. Each simulation runs for more than 20 encounter periods.
2.3. Post-Processing
The forces and moments directly from RANS are obtained by integrating the pressure and viscous stress over the hull surface. The pressure is the total pressure, including the dynamic pressure and static pressure. In the present consideration, the forces and moments, as well as the ship motions, are evaluated at the center of gravity in the completely ship-fixed coordinate system. This means that the results from RANS have to be transformed from the horizontal coordinate system to the ship-fixed coordinate system during the data post-processing. The low-frequency components and high-frequency components of force, moment or motion can be extracted by regressing the time histories of the RANS results.
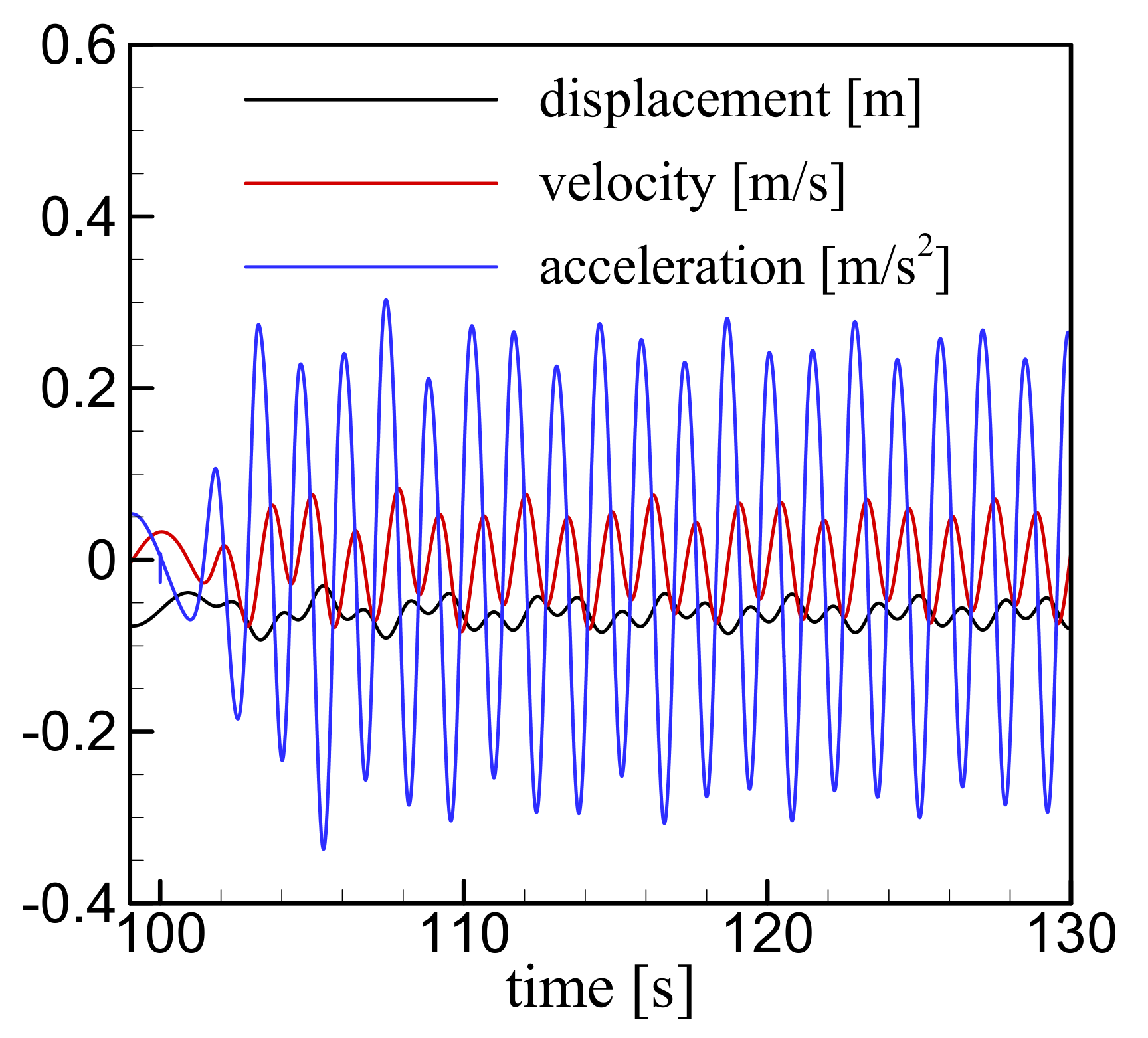
Figure 4 presents the computed time histories of the displacement, velocity and acceleration of the surge motion for a case. The surge displacement contains the initial longitudinal elongation of the spring system which produces a force to balance the ship resistance in calm water. As observed, the traces are explicitly characterized by two different periods. One is excited by waves, which is definitely consistent with the wave period. The other is due to the spring system, and larger than the wave-induced one. In order to separate out the low-frequency component and high-frequency component from the time histories, Fourier series with double frequencies, i.e., Equation (1), are employed to regress the time histories. The Fourier series taken here are up to the fifth order. The spring frequency
obtained from regression analysis is around 1.604 s
−1, corresponding to a period of 3.92 s.
During the towing tank test, the aforementioned forces and moments obtained by integrating the pressure and viscous stress over the hull surface cannot be directly measured, as the ship performs inertia motions in the waves. The inertia forces and moments are naturally included in the measured data. In this regard, it is very similar to the PMM (Planar Motion Mechanism) test or CMT (Circular Motion Test). For comparison purposes, we can first subtract the inertia forces and moments from the directly measured data of the PMM test or CMT, then compare the resulting data with the computed results for validation. The works by Uharek and Cura-Hochbaum [
16] and Lengwinat and Cura Hochbaum [
17] confirmed the contributions of inertia effects to the mean forces and moments acting on a ship in waves. The inertia forces and moments are not of small values for some cases, compared with that obtained by integrating the pressure and viscous stress over the hull surface.
In order to validate the present computed results, they are compared with the experimental data published by Yasukawa [
12]. The experimental data should include the inertia effects. The mean surge force, sway force and yaw moment, including inertia effects, may be expressed in a ship-fixed coordinate system as
where
is the ship mass;
,
and
are inertia moments and
is assumed;
is the acceleration due to gravity;
,
and
are the force or moment due to both hydrodynamics and hydrostatics;
,
and
are components of ship linear velocity;
,
and
are components of ship angular velocity;
is the transformation matrix; and
is the component at the third row of first column. The dot over a variable denotes a derivative with respect to time, and the bar over a variable denotes the mean of the variable.
For the data post-processing, the forces, moments and ship motions directly from RANS are first transformed from the horizontal coordinate system to the ship-fixed coordinate system, as mentioned. Then, Equation (1) is used to regress the resulting data, and , , , , and can be consequently obtained. For the mean terms of two coupling motion variables, such as , the time histories of their product are calculated at first, and then the resulting time histories are regressed using Equation (1).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}