Mitigation Effect of Perforation Drilling on the Sliding Risk during Spudcan Installation Close to Footprints


Abstract
:1. Introduction
2. CEL Model and Verification
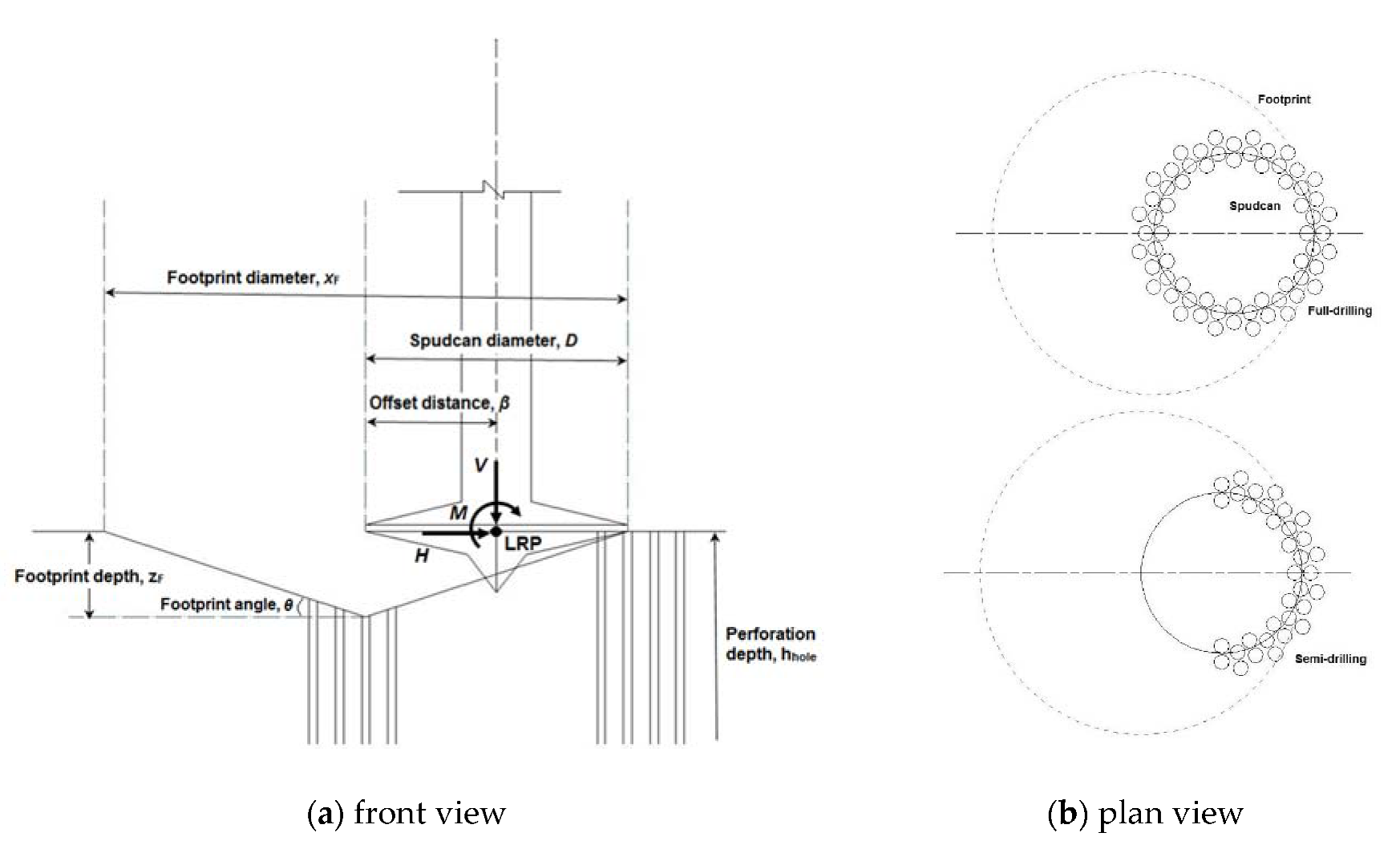
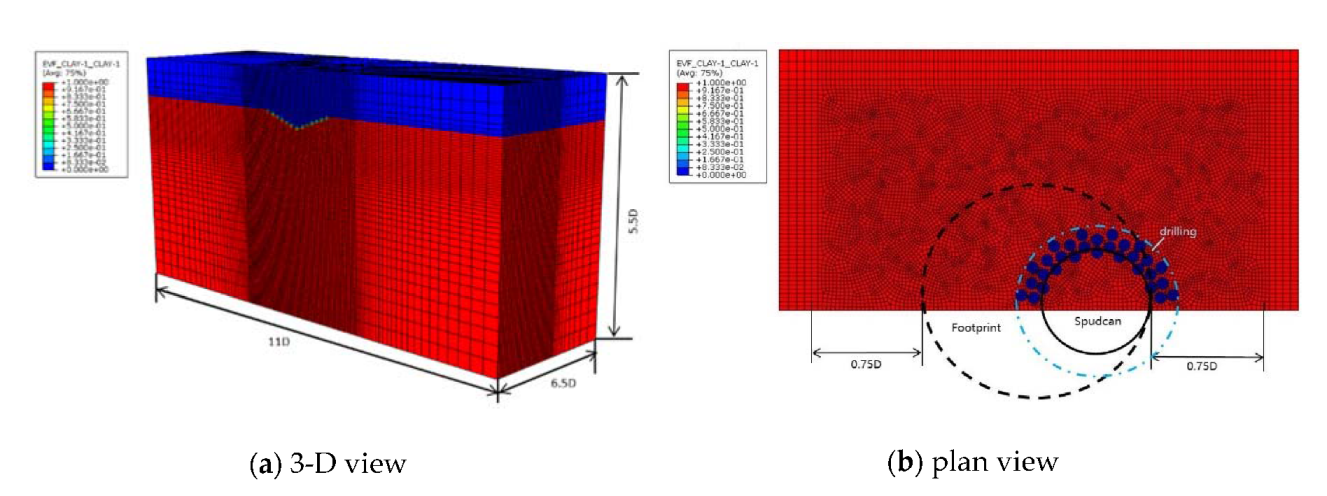
2.1. Finite Element Model
2.2. Boundary Conditions
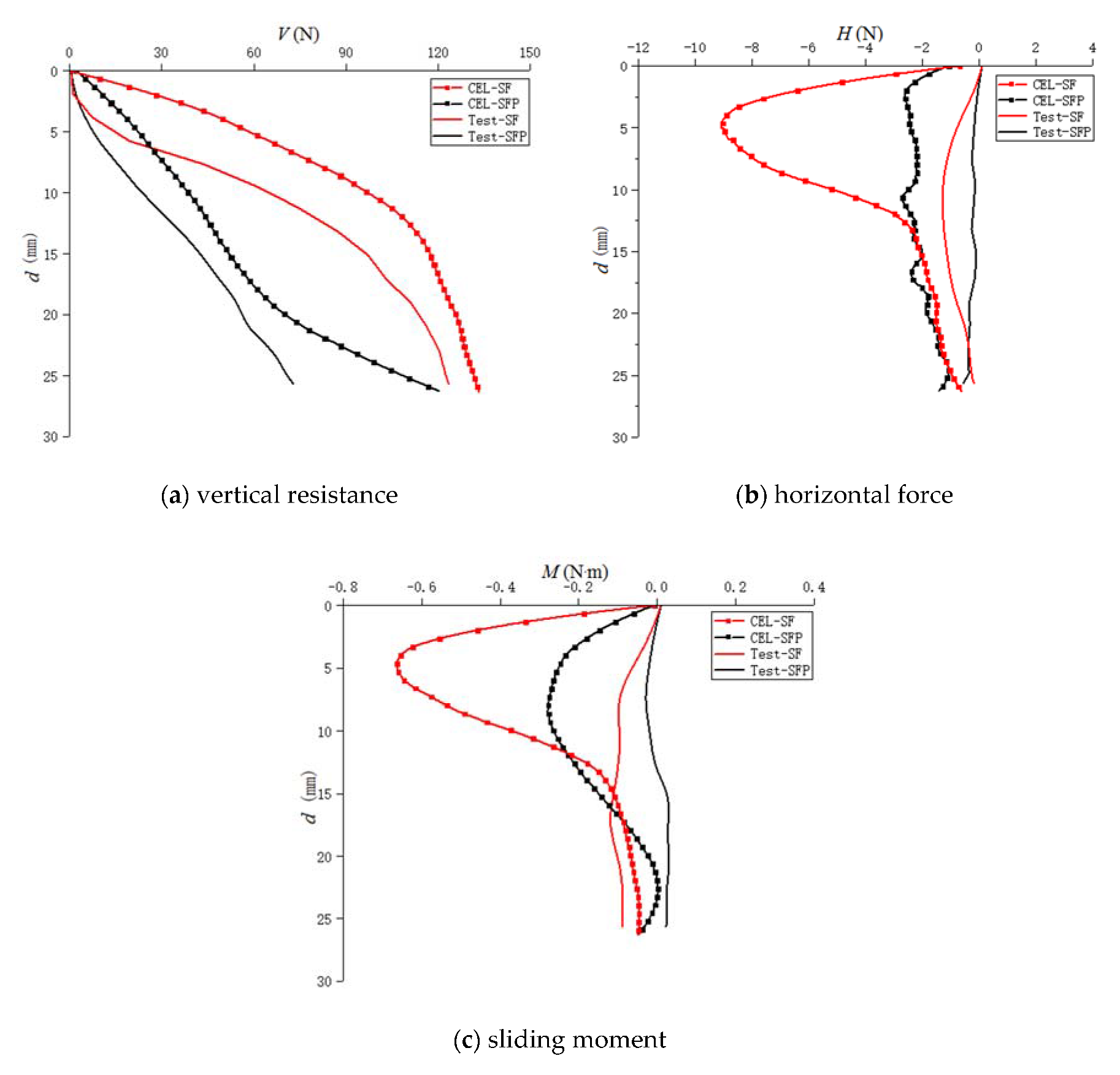
2.3. Model Validation
3. Results and Discussion
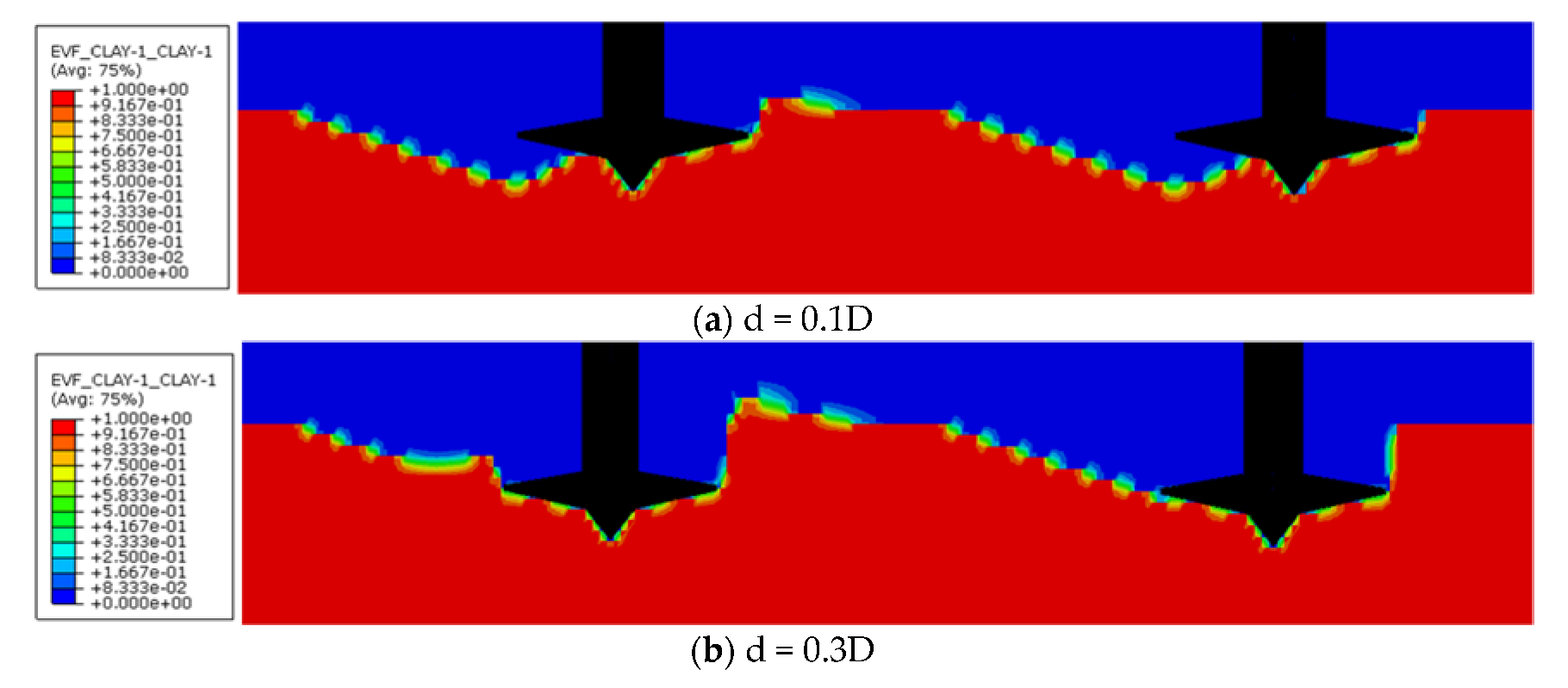
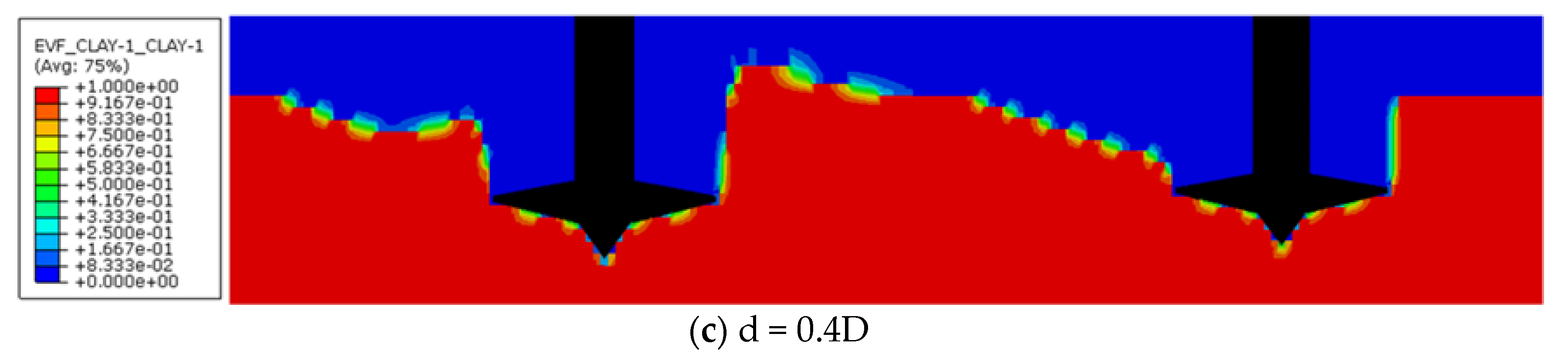
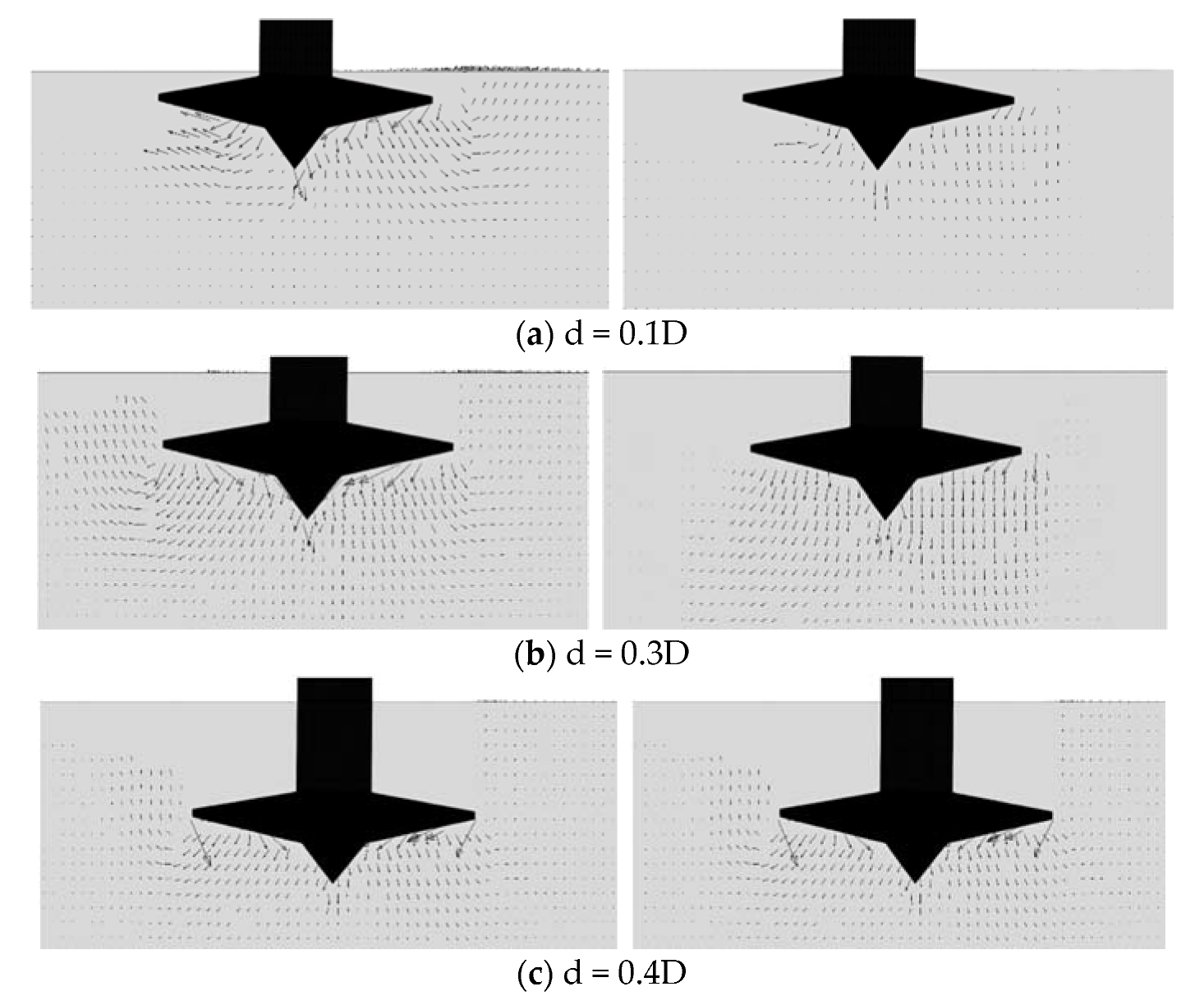
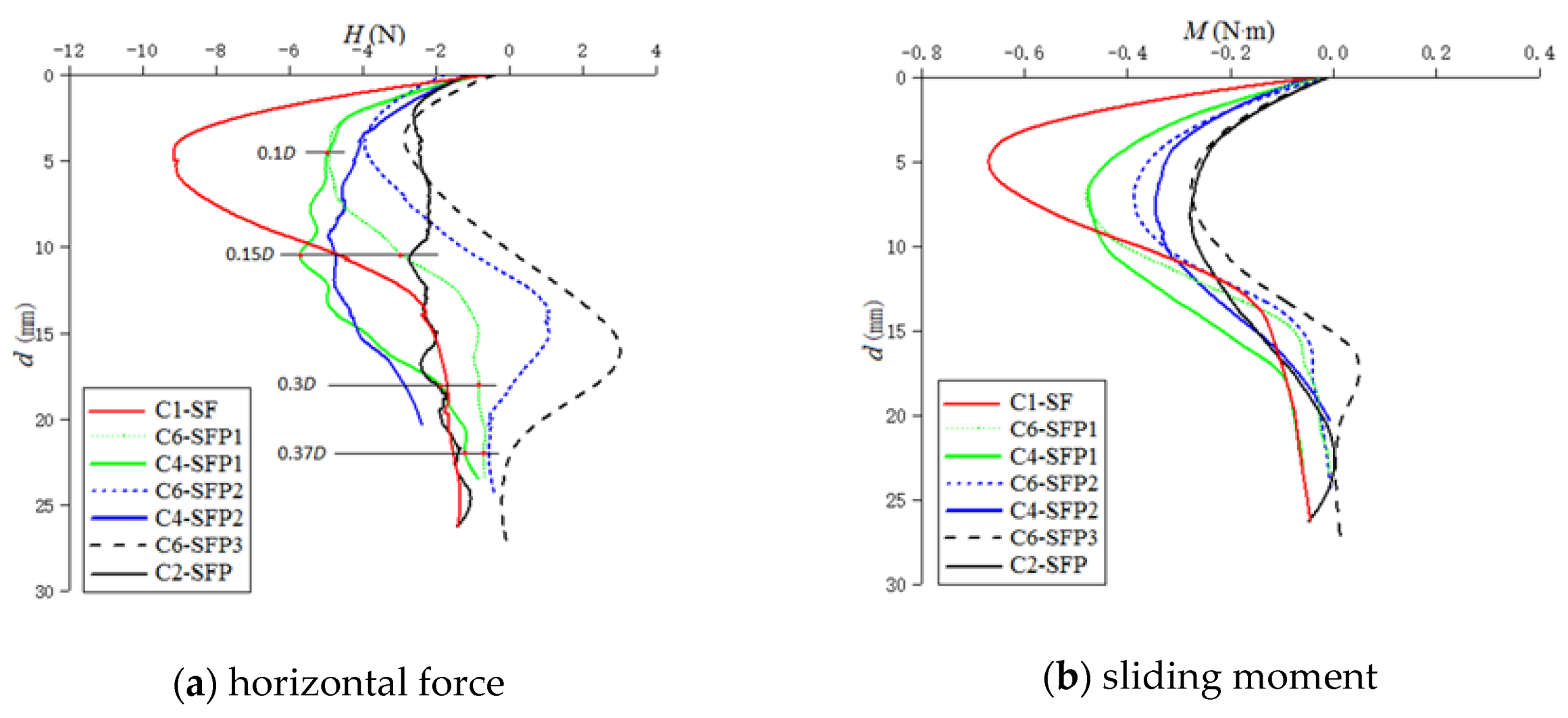
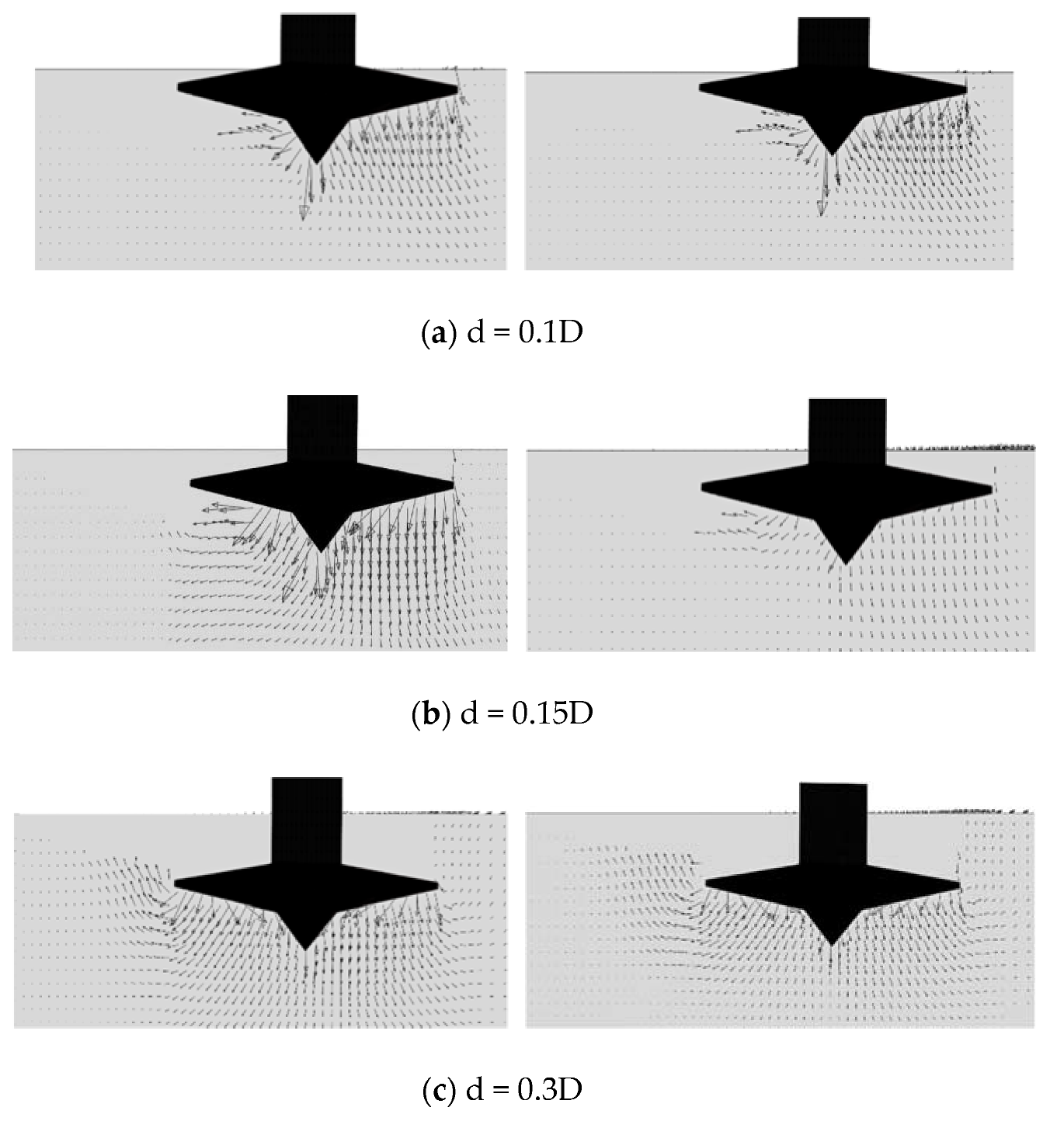
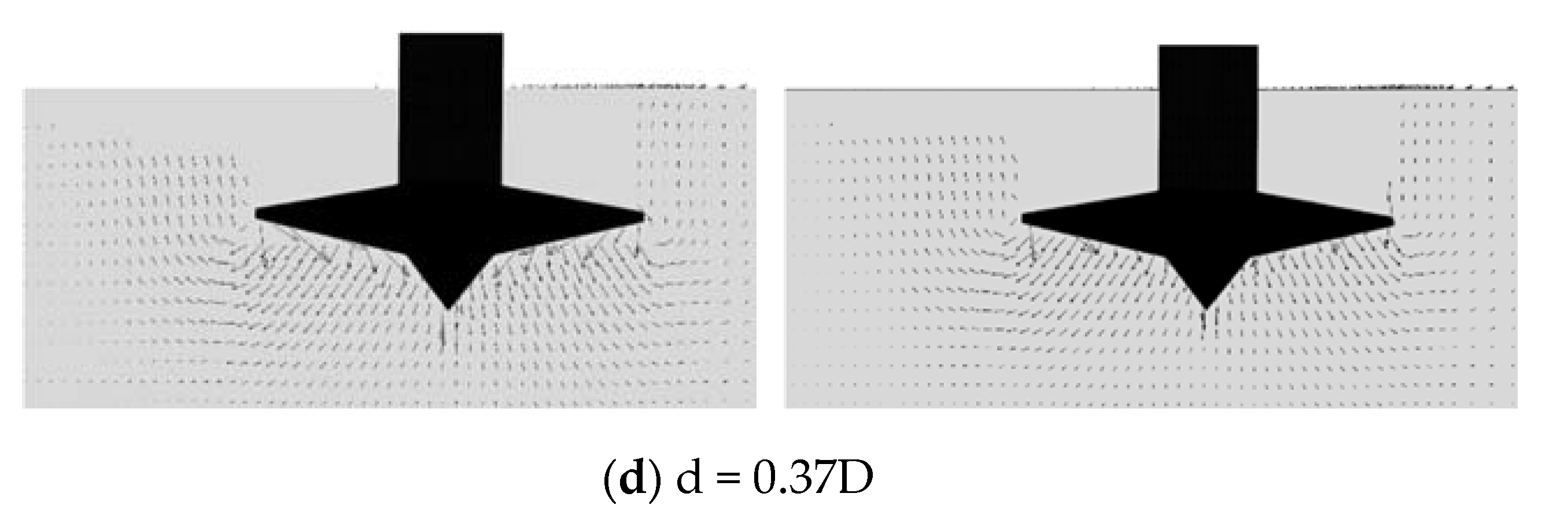
3.1. Mitigation Mechanism
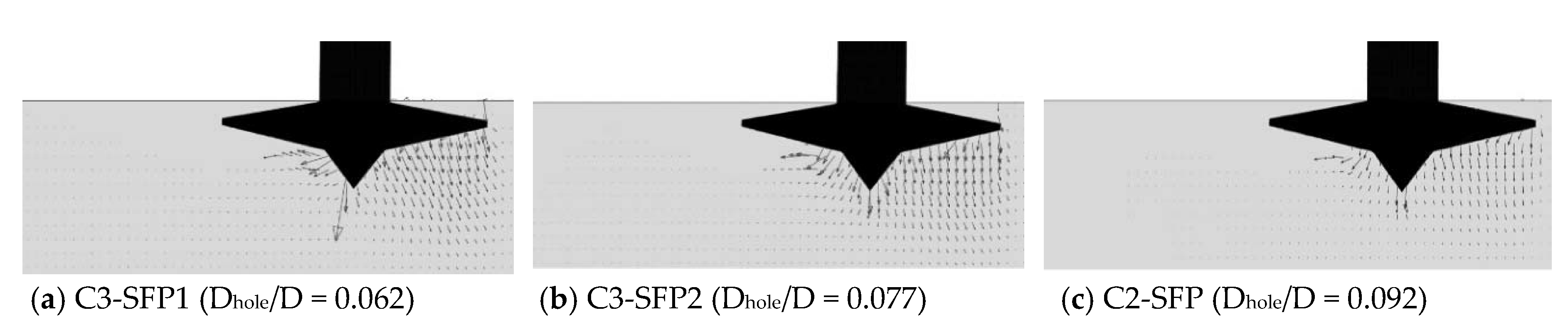
3.2. Effect of Borehole Diameter
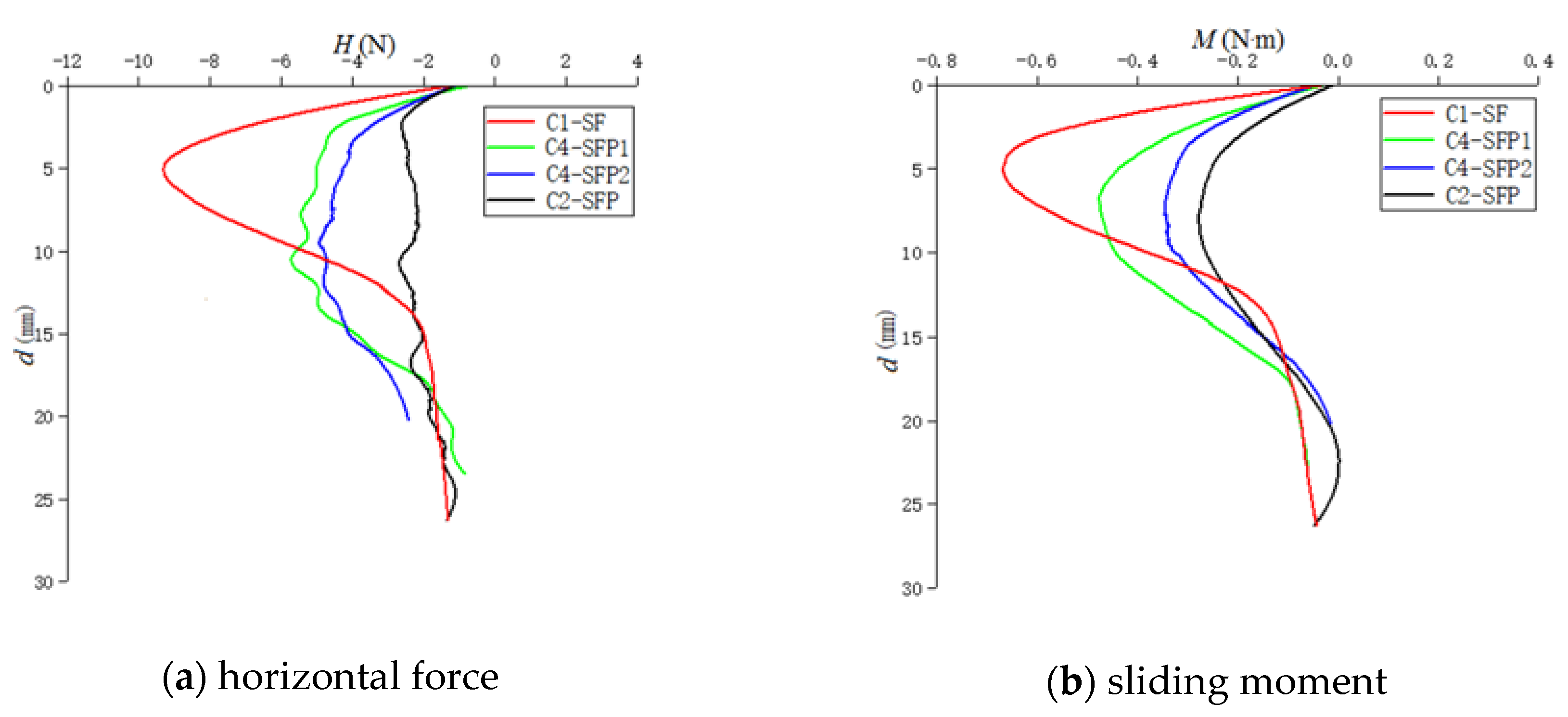
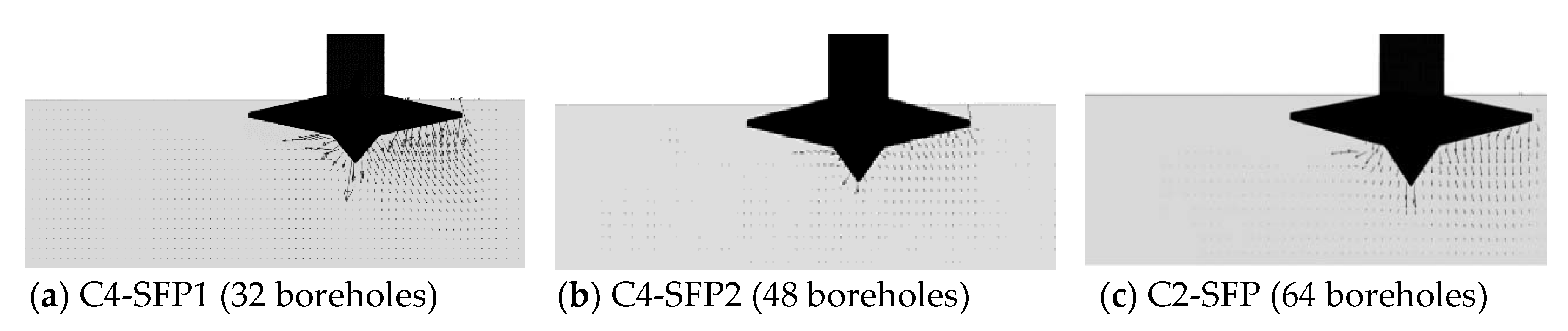
3.3. Effect of Borehole Number
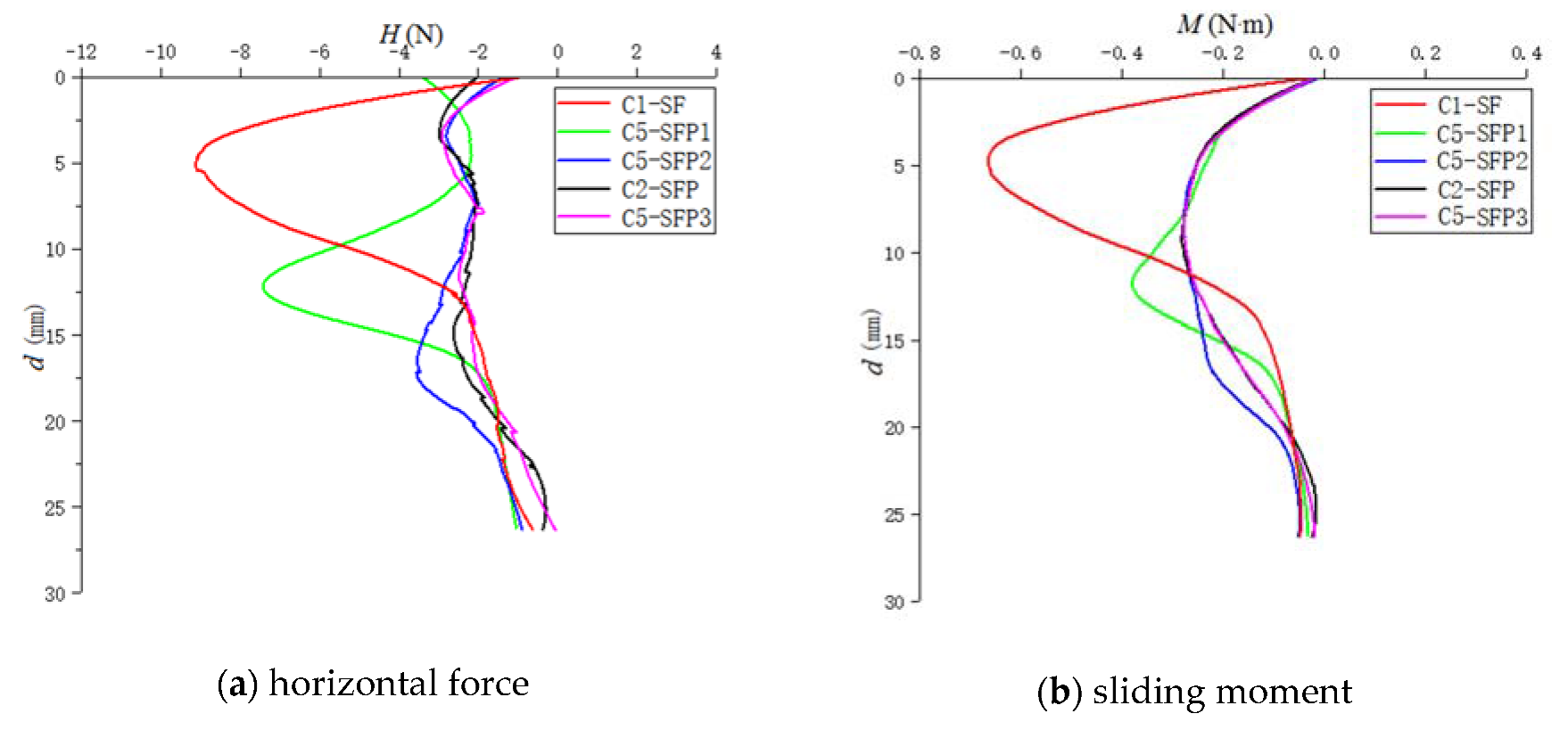
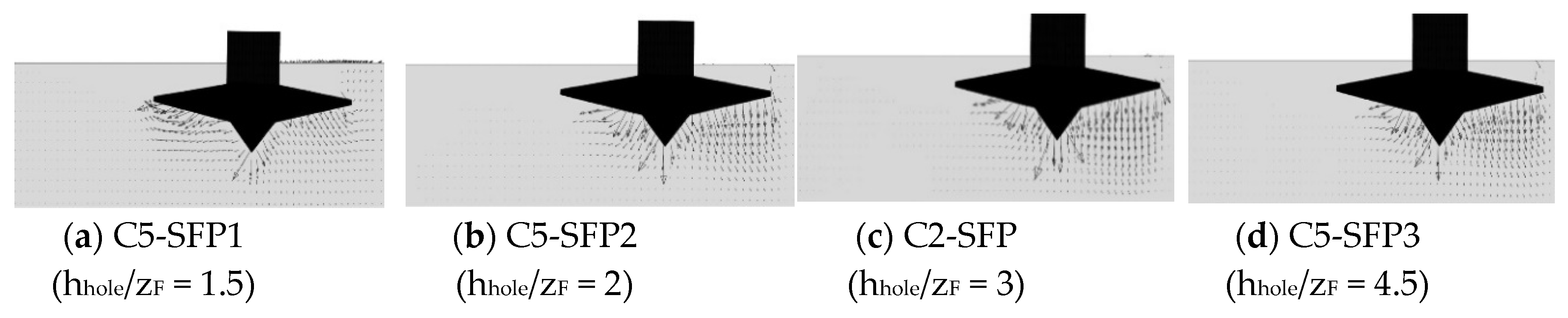
3.4. Effect of Borehole Depth
3.5. Effect of Drilling Range
4. Conclusions
- (1)
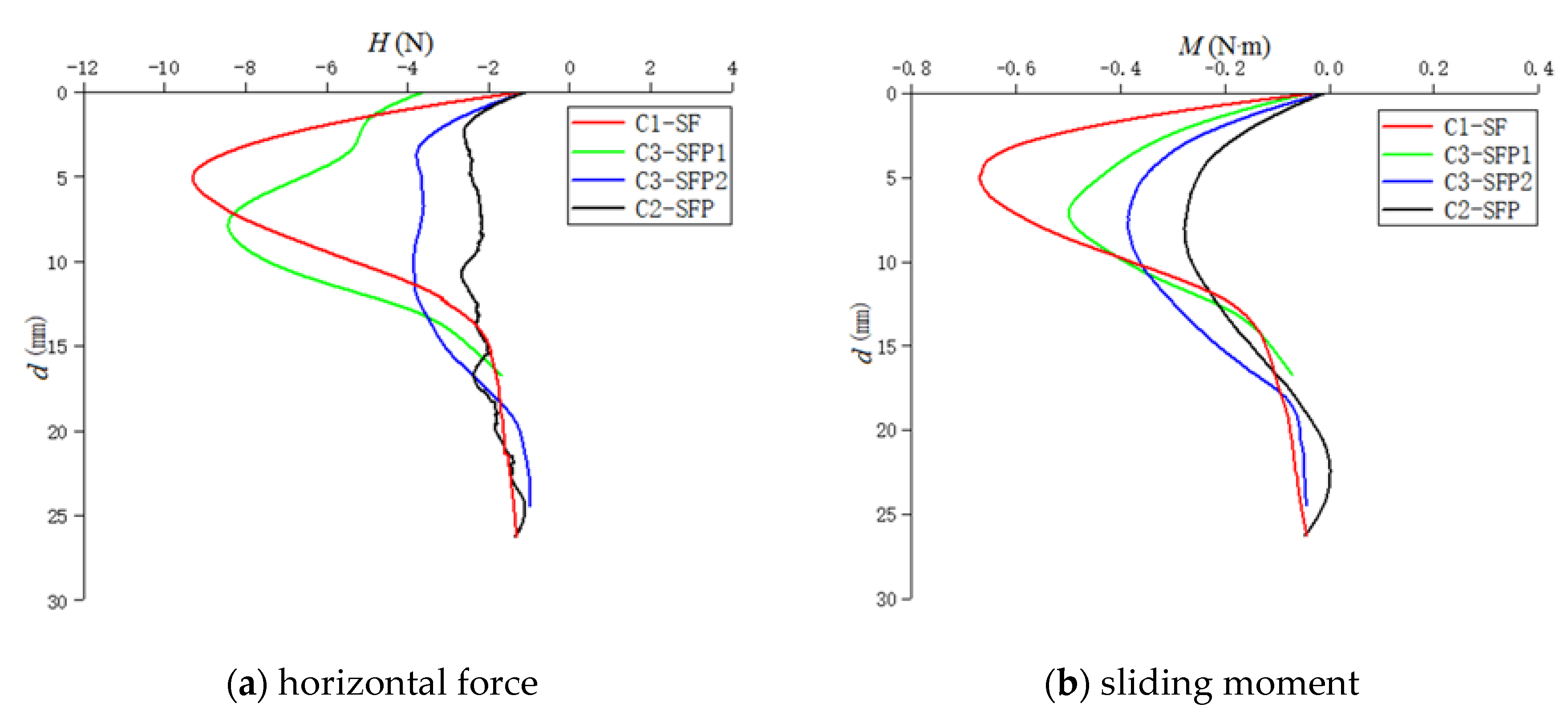
- The CEL model is effective in simulating the spudcan installation close to footprints with perforation drilling. During the spudcan installation close to footprints, the induced sliding moment and horizontal force increases and reaches the peak values, followed by a reduction. With proper configuration, the perforation drilling method can significantly reduce the peak sliding loads.
- (2)
- The larger the borehole diameter and the borehole number are, the smaller the bending moment and horizontal force acting on the spudcan are, indicating higher efficiency in mitigating the sliding risk. The perforation drilling with 64 boreholes of Dhole/D = 0.092 significantly reduces the maximum bending moment and horizontal force by 60% and 71%, respectively.
- (3)
- The mitigation efficiency increases with the borehole depth. However, it shows little improvement when the borehole depth is deeper than 2zF. Therefore, an optimal perforation drilling depth of 2zF is recommended in the engineering practice.
- (4)
- The semi-drilling is more effective in mitigating sliding risks than the full-drilling. The main reason is that the semi-drilling only weakens the strong side in the soil under the spudcan, while the full-drilling simultaneously weaken both the strong and weak side. Considering the significant costs of perforation drilling in the engineering practice, it is recommended to perform semi-drilling on the outer side of the footprint for sliding risk mitigation.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Stewart, D.P.; Finnie, M.S. Spudcan–Footprint Interaction During Jack–Up Workovers. In Proceedings of the Eleventh International Offshore and Polar Engineering Conference. International Society of Offshore and Polar Engineers, Stavanger, Norway, 17–22 June 2001. [Google Scholar]
- Cassidy, M.J.; Quah, C.K.; Foo, K.S. Experimental Investigation of the Reinstallation of Spudcan Footings Close to Existing Footprints. J. Geotech. Geoenviron. Eng. 2009, 135, 474–486. [Google Scholar] [CrossRef]
- Gan, C.T. Centrifuge Model Study on Spudcan-Footprint Interaction. Ph.D. Thesis, National University of Singapore, Singapore, 2009. [Google Scholar]
- Gan, C.T.; Leung, C.F.; Cassidy, M.J.; Gaudin, C.; Chow, Y.K. Effect of time on spudcan- footprint interaction in clay. Géotechnique 2012, 62, 401–413. [Google Scholar] [CrossRef]
- Gaudin, C.; Kong, V.; Cassidy, M. An Overview of Spudcan Reinstallation Near a Footprint. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 30 April–3 May 2012. [Google Scholar]
- Kong, V.; Cassidy, M.J.; Gan, C.T. Experimental study of the effect of geometry on reinstallation of jack-up next to footprint. Can. Geotech. J. 2013, 50, 557–573. [Google Scholar] [CrossRef]
- Kong, V.; Cassidy, M.J.; Gaudin, C. Failure mechanisms of a spudcan penetrating next to an existing footprint. Theor. Appl. Mech. Lett. 2015, 5, 64–68. [Google Scholar] [CrossRef] [Green Version]
- Fang, Y.S.; Liu, C.; Shih, Y.C. Re-Penetration of a Spudcan on Sand Near an Existing Footprint. J. Geoengin. 2019, 14, 141–154. [Google Scholar]
- Yuan, Y.; Zhang, Y.; Zhang, C.; Fan, L.; Duan, M. Three-legged Jack-up unit Scale Model Experiment Study of Spudcan Reinstallation Close to Footprint. In Proceedings of the 29th International Ocean and Polar Engineering Conference. International Society of Offshore and Polar Engineers, Honolulu, HI, USA, 16–21 June 2019; pp. 2049–2054. [Google Scholar]
- Mao, D.F.; Zhang, M.H.; Zhang, L.B.; Duan, M.L.; Song, L.S. Sliding risk of jack-up platform re-installation close to existing footprint and its countermeasure. Pet. Explor. Dev. 2015, 42, 233–237. [Google Scholar] [CrossRef]
- Zhang, W. Investigation of Spudcan-Footprint Interaction in Clay with a Novel Implementation of a Three–Dimensional Large Deformation Finite Element Method. Ph.D. Thesis, The University of Western Australia, Perth, Australia, 2018. [Google Scholar]
- Yu, L.; Zhang, H.Y.; Li, J.; Wang, X. Finite Element Analysis and Parametric Study of Spudcan Footing Geometries Penetrating Clay Near Existing Footprints. J. Mar. Sci. Eng. 2019, 7, 175. [Google Scholar] [CrossRef] [Green Version]
- Zheng, J.; Wang, D. Numerical investigation of spudcan-footprint interaction in non-uniform clays. Ocean. Eng. 2019, 188, 106295. [Google Scholar] [CrossRef]
- Jun, M.J.; Kim, Y.H.; Hossain, M.S.; Cassidy, M.J.; Hu, Y.; Park, S.G. Global jack-up rig behaviour next to a footprint. Mar. Struct. 2019, 64, 421–441. [Google Scholar] [CrossRef]
- Dean, E.T.R.; Serra, H. Concepts for mitigation of spudcan-footprint interaction in normally consolidated clay. In Proceedings of the Fourteenth International Offshore and Polar Engineering Conference. International Society of Offshore and Polar Engineers, Toulon, France, 23–28 May 2004; pp. 721–728. [Google Scholar]
- Hossain, M.S.; Stainforth, R.; Ngo, V.T.; Cassidy, M.J.; Kim, Y.H.; Jun, M.J. Experimental investigation on the effect of spudcan shape on spudcan-footprint interaction. Appl. Ocean Res. 2017, 69, 65–75. [Google Scholar] [CrossRef]
- Jun, M.J.; Hossain, M.S.; Cassidy, M.J.; Hu, Y.; Park, S.G. Physical and numerical modelling of novel spudcan to ease spudcan-footprint interactions. In Proceedings of the 28th International Ocean and Polar Engineering Conference. International Society of Offshore and Polar Engineers, Sapporo, Japan, 10–15 June 2018; pp. 557–561. [Google Scholar]
- Jun, M.J.; Kim, Y.H.; Hossain, M.S.; Cassidy, M.J.; Hu, Y.; Sim, J.W. Numerical investigation of novel spudcan shapes for easing spudcan-footprint interactions. J. Geotech. Geoenvironmental Eng. 2018, 144, 4018055. [Google Scholar] [CrossRef] [Green Version]
- Jun, M.J.; Kim, Y.H.; Hossain, M.S.; Cassidy, M.J.; Hu, Y.; Park, S.G. Optimising spudcan shape for mitigating horizontal and moment loads induced on a spudcan penetrating near a conical footprint. Appl. Ocean Res. 2018, 79, 62–73. [Google Scholar] [CrossRef]
- Hossain, M.S.; Dong, D.; Gaudin, C.; Kong, V.W. Skirted spudcans and perforation drilling for installation of spudcans close to existing footprints. In Proceedings of the Offshore Site Investigation and Geotechnics: Integrated Technologies-Present and Future. Society of Underwater Technology, London, UK, 12–14 September 2012; pp. 597–605. [Google Scholar]
- Hossain, M.S.; Stainforth, R. Perforation drilling for easing spudcan-footprint interaction issues. Ocean Eng. 2016, 113, 308–318. [Google Scholar] [CrossRef] [Green Version]
- Brennan, R.; Diana, H.; Stonor, R.W.P. Installing jackups in punch-through-sensitive clays. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 1–4 May 2006. [Google Scholar]
- Chan, N.H.C.; Paisley, J.M.; Holloway, G.L. Characterization of soils affected by rig emplacement and Swiss cheese operations-Natura Sea, Indonesia, a case study. In Proceedings of the 2nd Jack-up Asia Conference and Exhibition, Singapore, 17–18 November 2008. [Google Scholar]
- Hartono, H.; Tho, K.; Leung, C.; Chow, Y. Centrifuge and Numerical Modelling of Reaming as a Mitigation Measure for Spudcan–Footprint Interaction. In Proceedings of the Offshore Technology Conference—Asia: Offshore Technology Conference, Kuala Lumpur, Malaysia, 25–28 March 2014; pp. 1478–1492. [Google Scholar]
- Qiu, G.; Henke, S.; Grabe, J. Application of a coupled Eulerian–Lagrangian approach on geomechanical problems involving large deformations. Comput. Geotech. 2011, 38, 30–39. [Google Scholar] [CrossRef]
- Tho, K.K.; Leung, C.F.; Chow, Y.K.; Swaddiwudhipong, S. Eulerian finite- element technique for analysis of jack-up spudcan penetration. Int. J. Geomech. 2012, 12, 64–73. [Google Scholar] [CrossRef]
- Wang, D.; Bienen, B.; Nazem, M. Large deformation finite element analyses in geotechnical engineering. Comput. Geotech. 2015, 65, 104–114. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Value |
|---|---|
| Soil effective unit weight, γ (kN/m3) | 7 |
| Internal friction angle, φ (°) | 0 |
| Dilatancy angle, ψ (°) | 0 |
| Undrained shear strength, su (kPa) | 6 |
| Elastic Modulus, E(kPa) | 500 su |
| Poisson’s ratio, υ | 0.49 |
| Numerical Cases | Dhole/D | hhole/zF | Number of Drilling | Range of Drilling |
|---|---|---|---|---|
| C1-SF | 0 | 0 | 0 | |
| C2-SFP | 0.092 | 3 | 64 | Full-drilling |
| C3-SFP1 | 0.062 | 3 | 64 | Full-drilling |
| C3-SFP2 | 0.077 | 3 | 64 | Full-drilling |
| C4-SFP1 | 0.092 | 3 | 32 | Full-drilling |
| C4-SFP2 | 0.092 | 3 | 48 | Full-drilling |
| C5-SFP1 | 0.092 | 1.5 | 64 | Full-drilling |
| C5-SFP2 | 0.092 | 2 | 64 | Full-drilling |
| C5-SFP3 | 0.092 | 4.5 | 64 | Full-drilling |
| C6-SFP1 | 0.092 | 3 | 32 | Semi-drilling |
| C6-SFP2 | 0.092 | 3 | 48 | Semi-drilling |
| C6-SFP3 | 0.092 | 3 | 64 | Semi-drilling |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, P.; Liu, Z.; Shi, D.; Fu, X.; Yan, K. Mitigation Effect of Perforation Drilling on the Sliding Risk during Spudcan Installation Close to Footprints. J. Mar. Sci. Eng. 2020, 8, 118. https://doi.org/10.3390/jmse8020118
Gao P, Liu Z, Shi D, Fu X, Yan K. Mitigation Effect of Perforation Drilling on the Sliding Risk during Spudcan Installation Close to Footprints. Journal of Marine Science and Engineering. 2020; 8(2):118. https://doi.org/10.3390/jmse8020118
Chicago/Turabian StyleGao, Pan, Zhihui Liu, Danda Shi, Xuehua Fu, and Keliang Yan. 2020. "Mitigation Effect of Perforation Drilling on the Sliding Risk during Spudcan Installation Close to Footprints" Journal of Marine Science and Engineering 8, no. 2: 118. https://doi.org/10.3390/jmse8020118