Research on the Bearing Capacity of a Damaged Jacket Repaired by a Grouting Clamp Based on a Type of Wedge Gripping


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Analysis of the Bearing Capacity of a Damaged Steel Pipe Pile
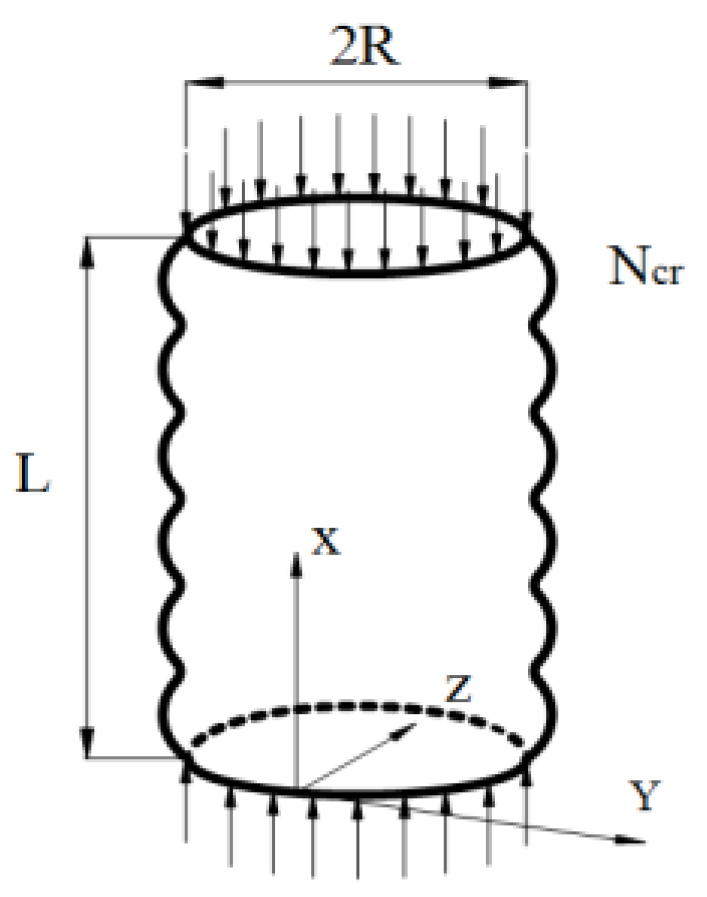
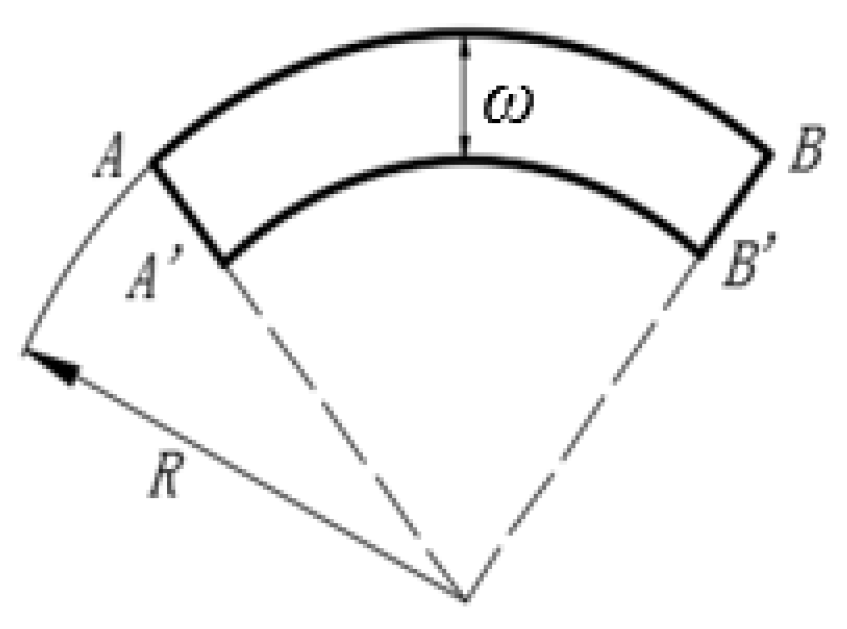
2.1. Buckling Analysis of an Ideal Steel Tubular Pile Under Axial Compression
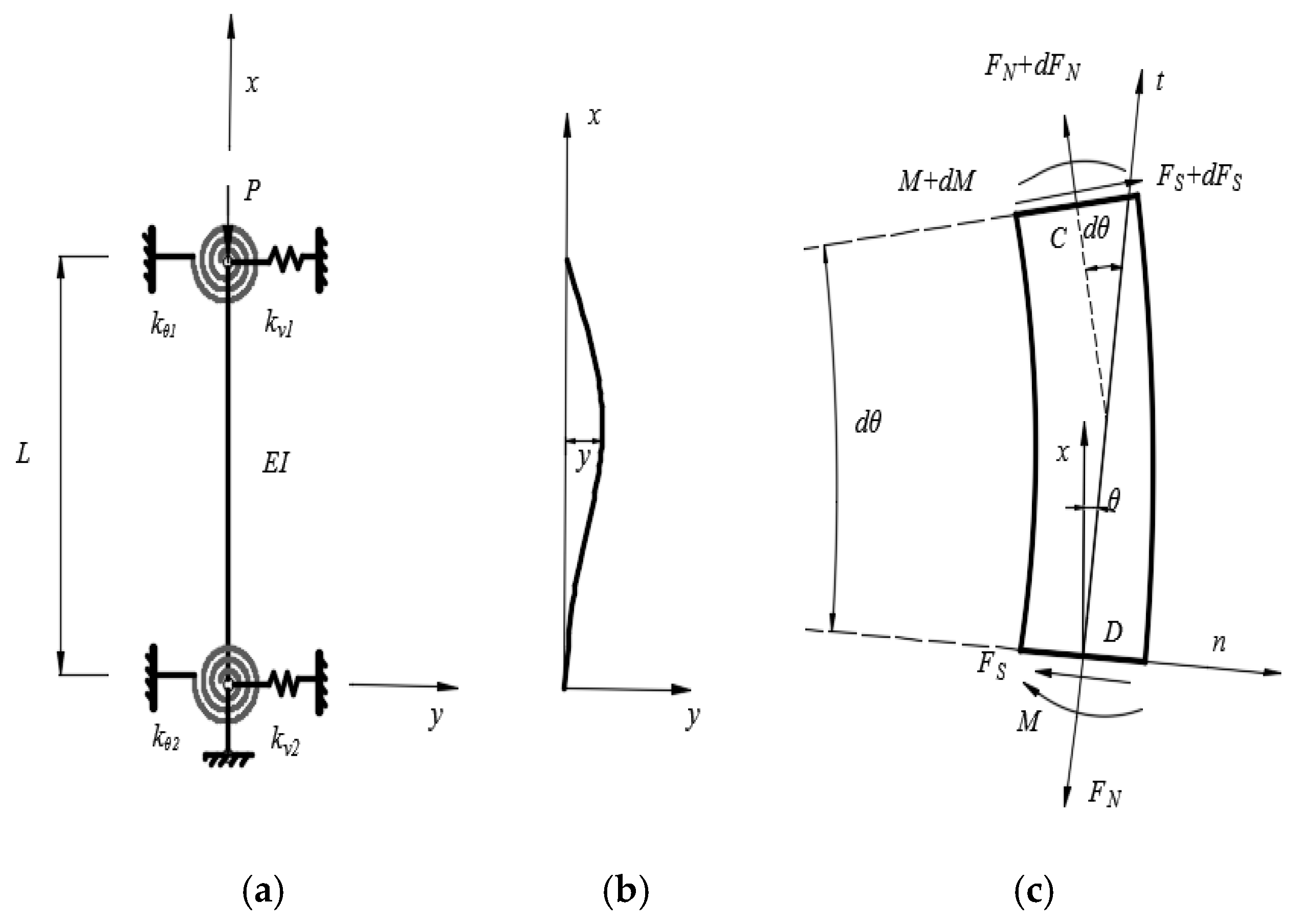
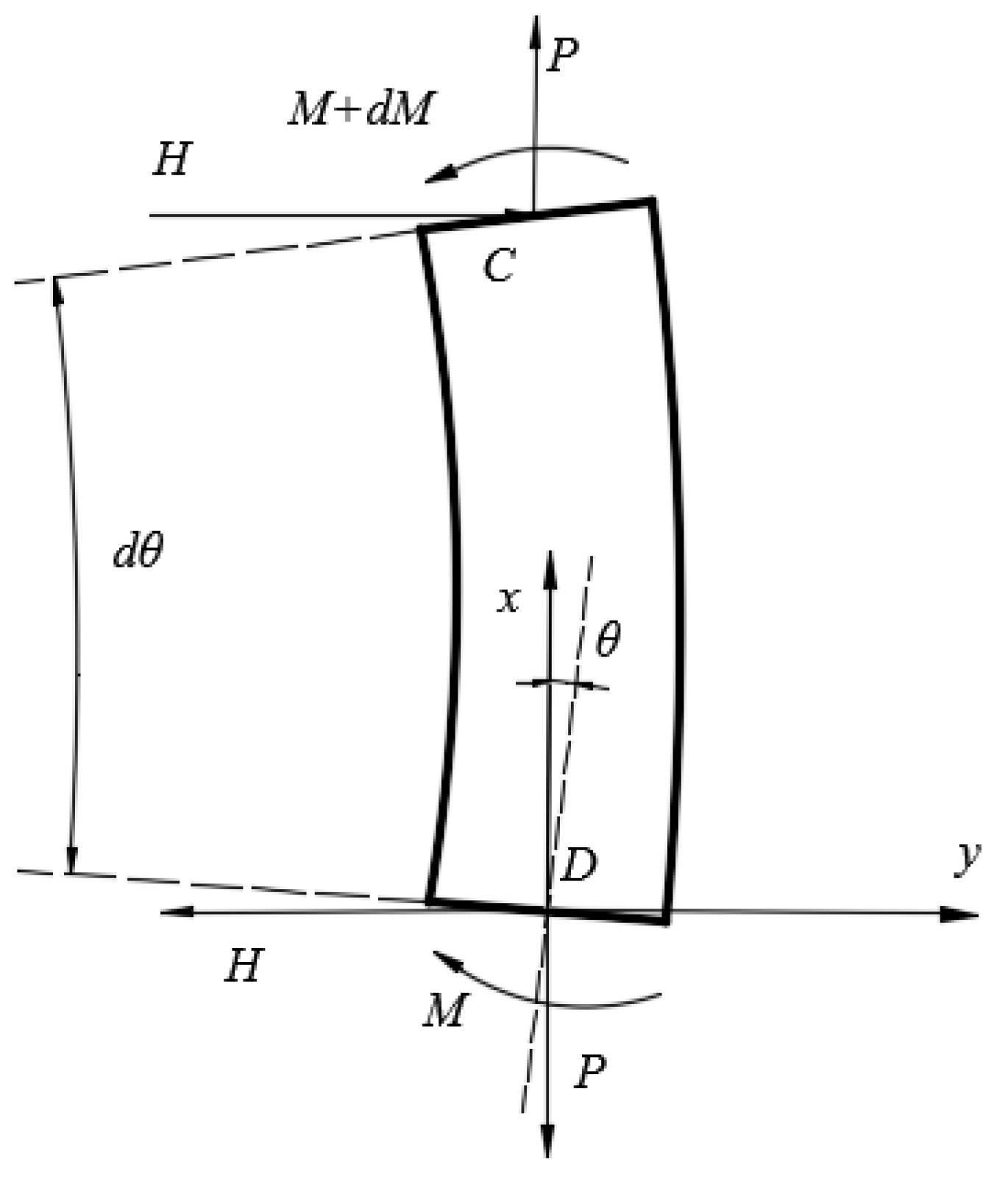
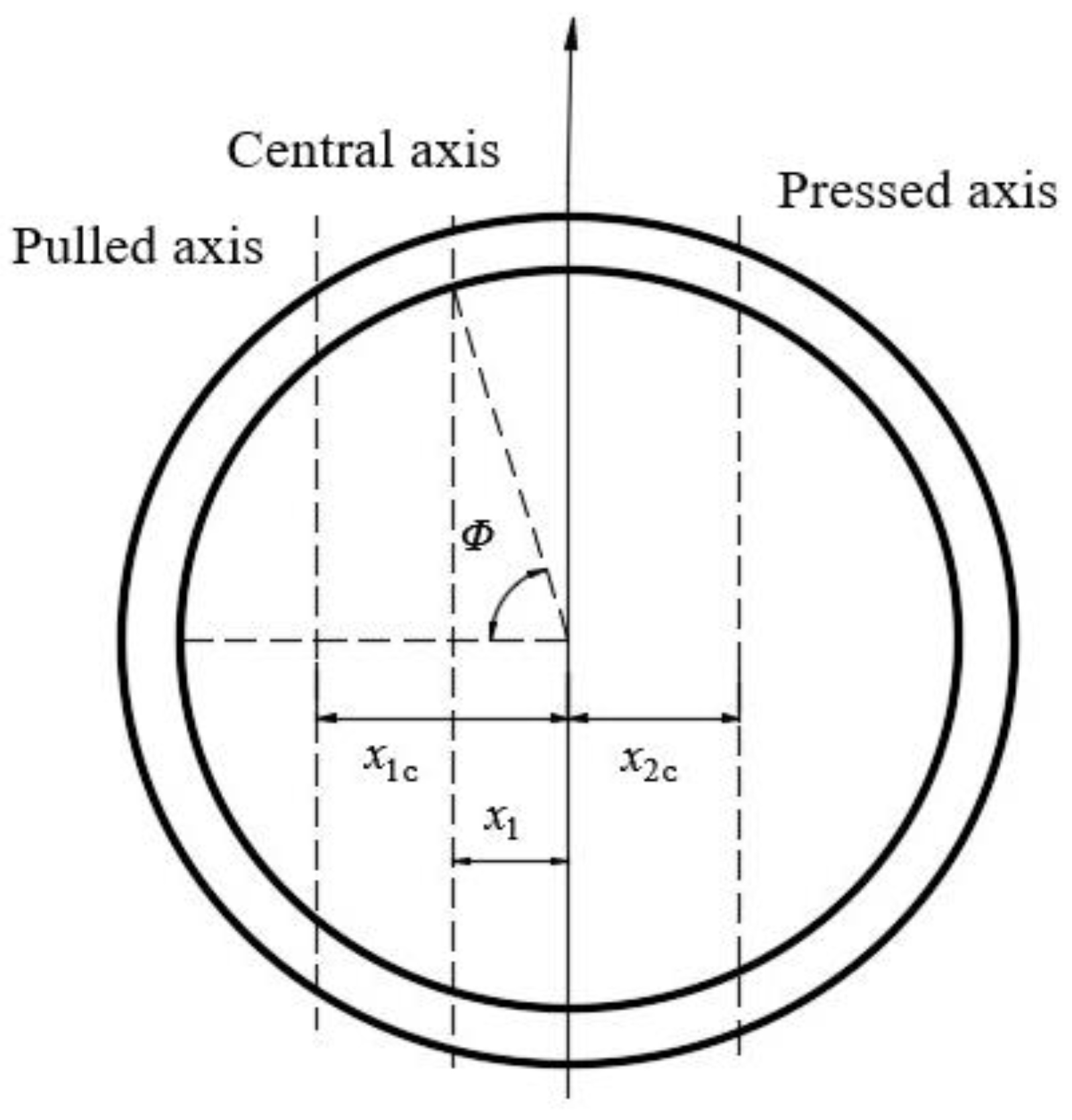
2.2. Buckling Analysis and Horizontal Bearing Capacity Analysis of a Bending Steel Tubular Pile under Axial Compression
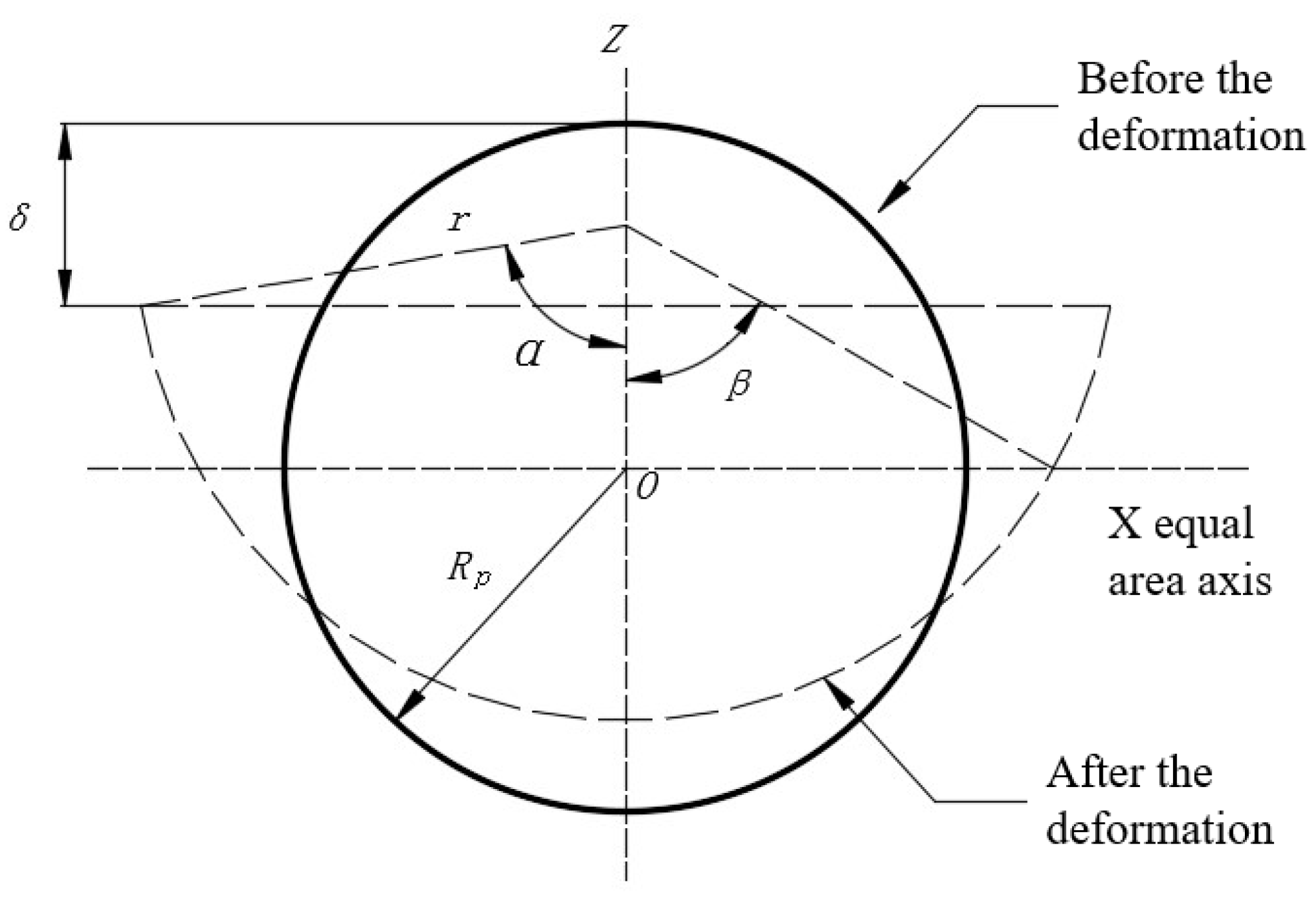
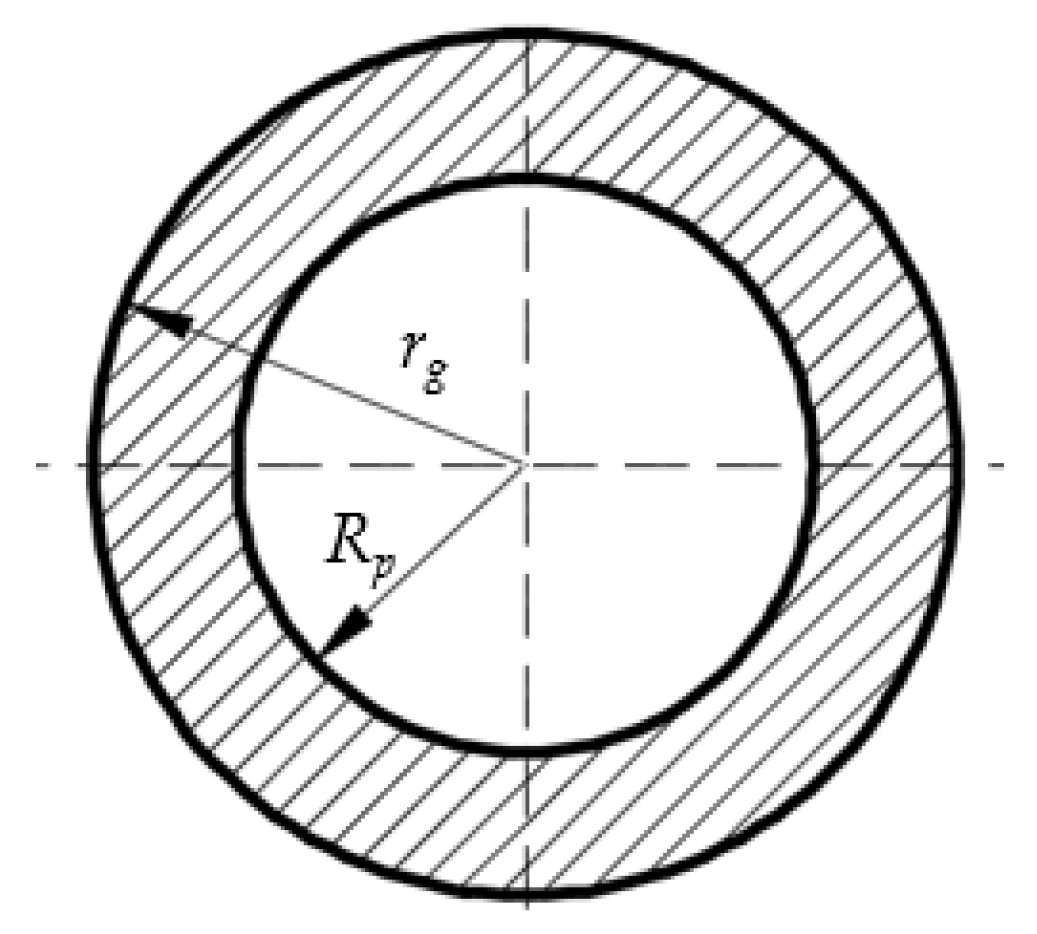
2.3. Ultimate Bending Moment and Axial Bearing Capacity of a Steel Pipe Pile with a Defective Section
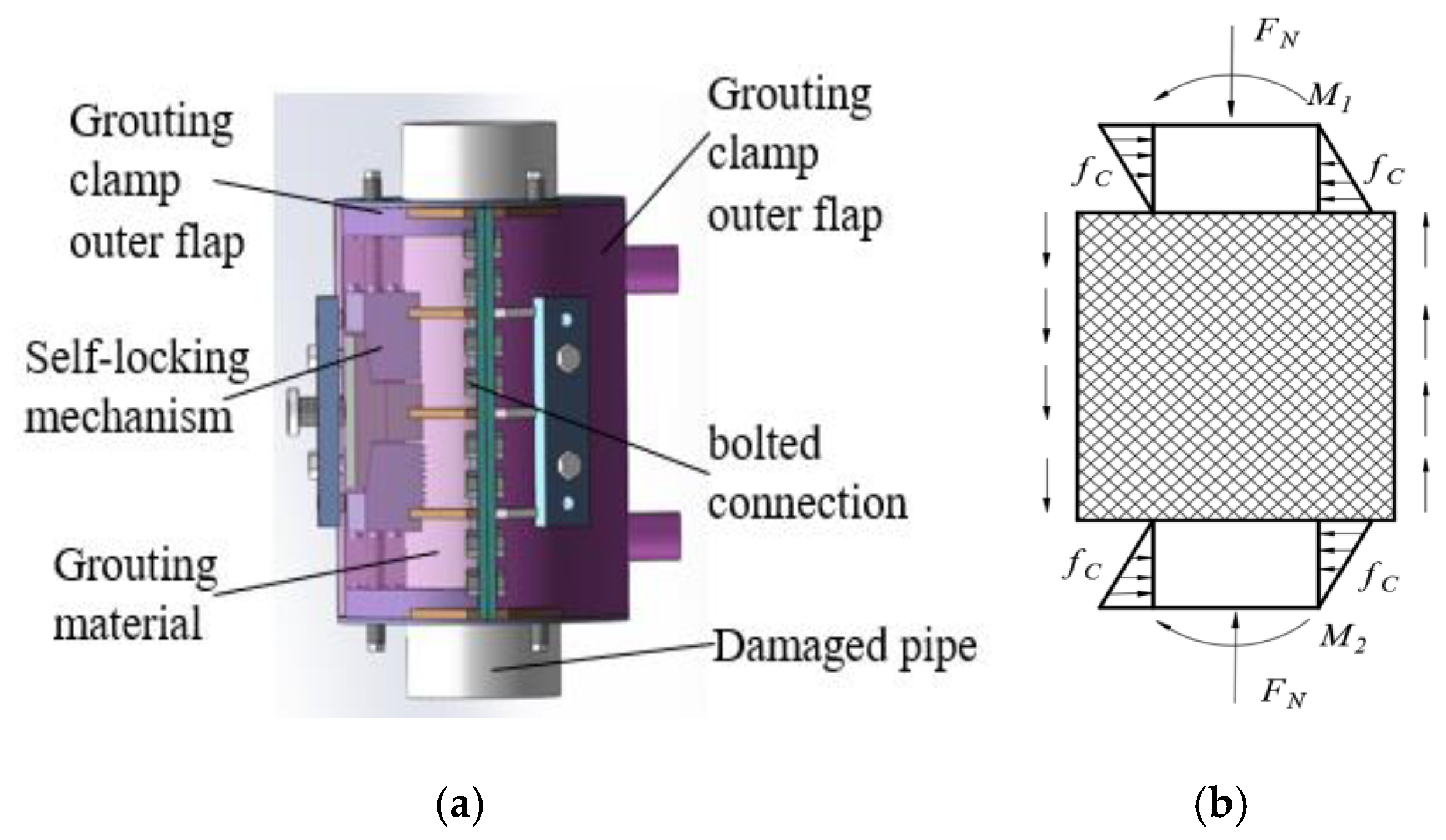
3. Analysis of the Bearing Capacity of a Grouting Clamp Based on a Type of Wedge Gripping
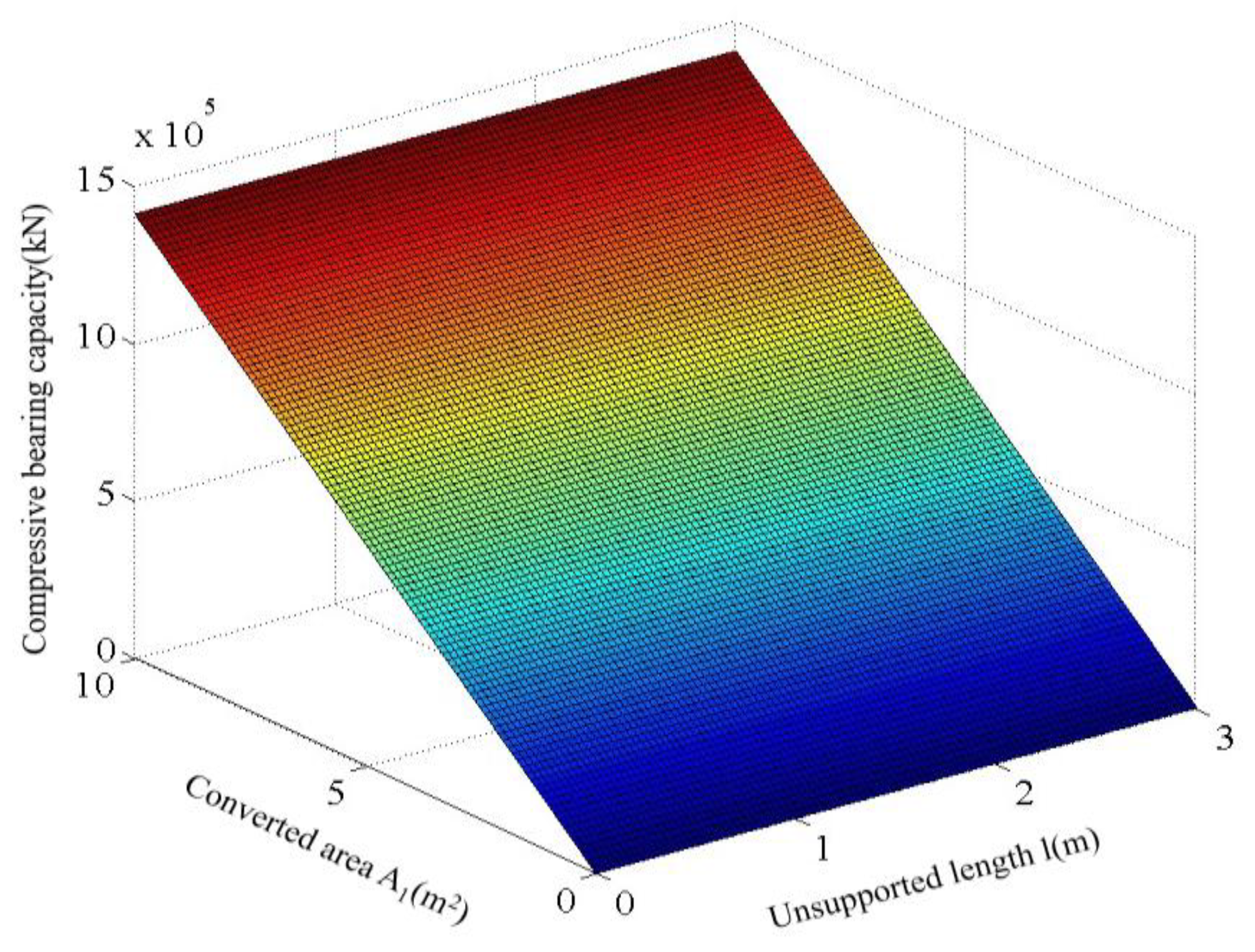
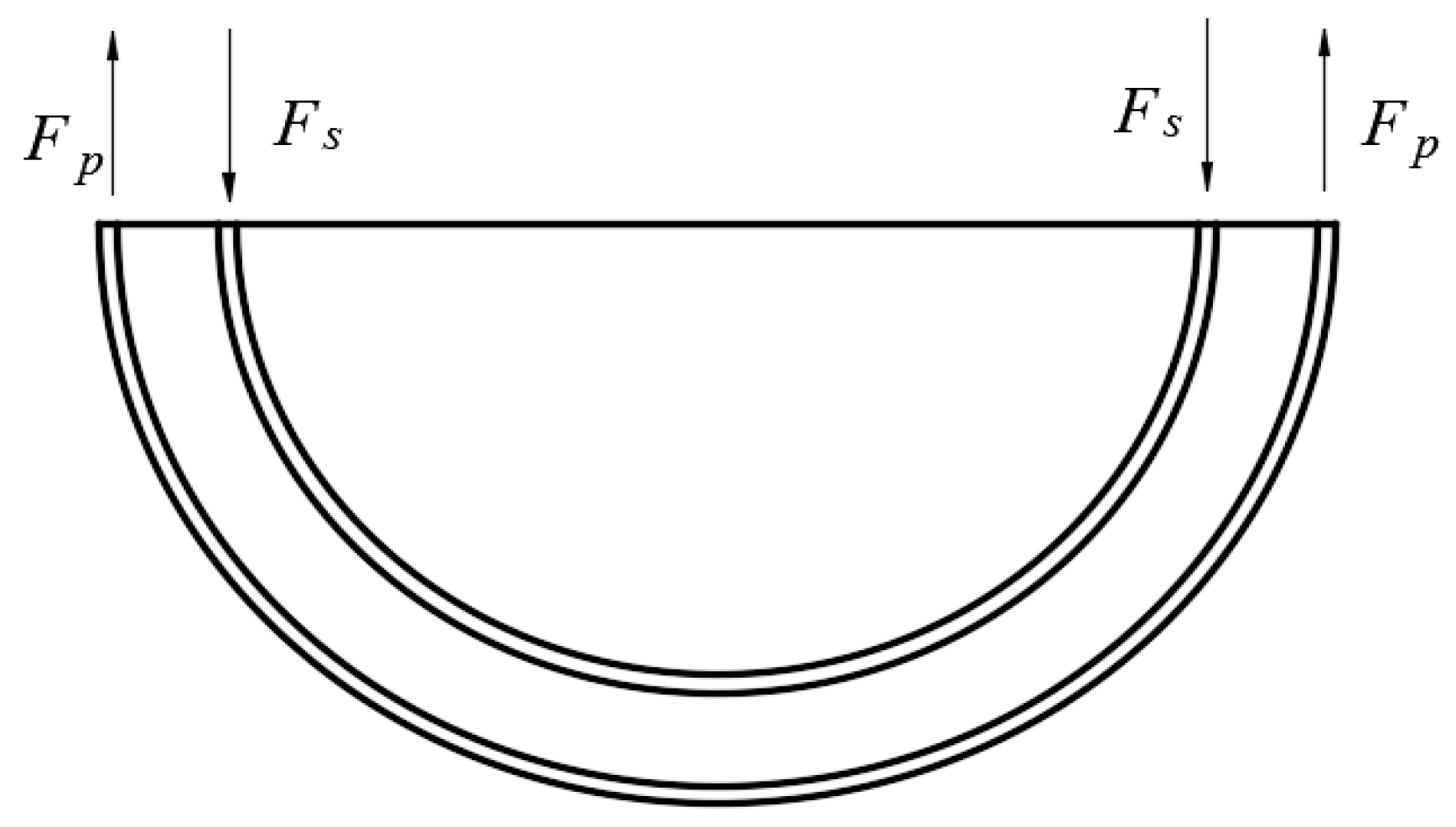
3.1. Analysis of the Axial Bearing Capacity of the Grouting Clamp
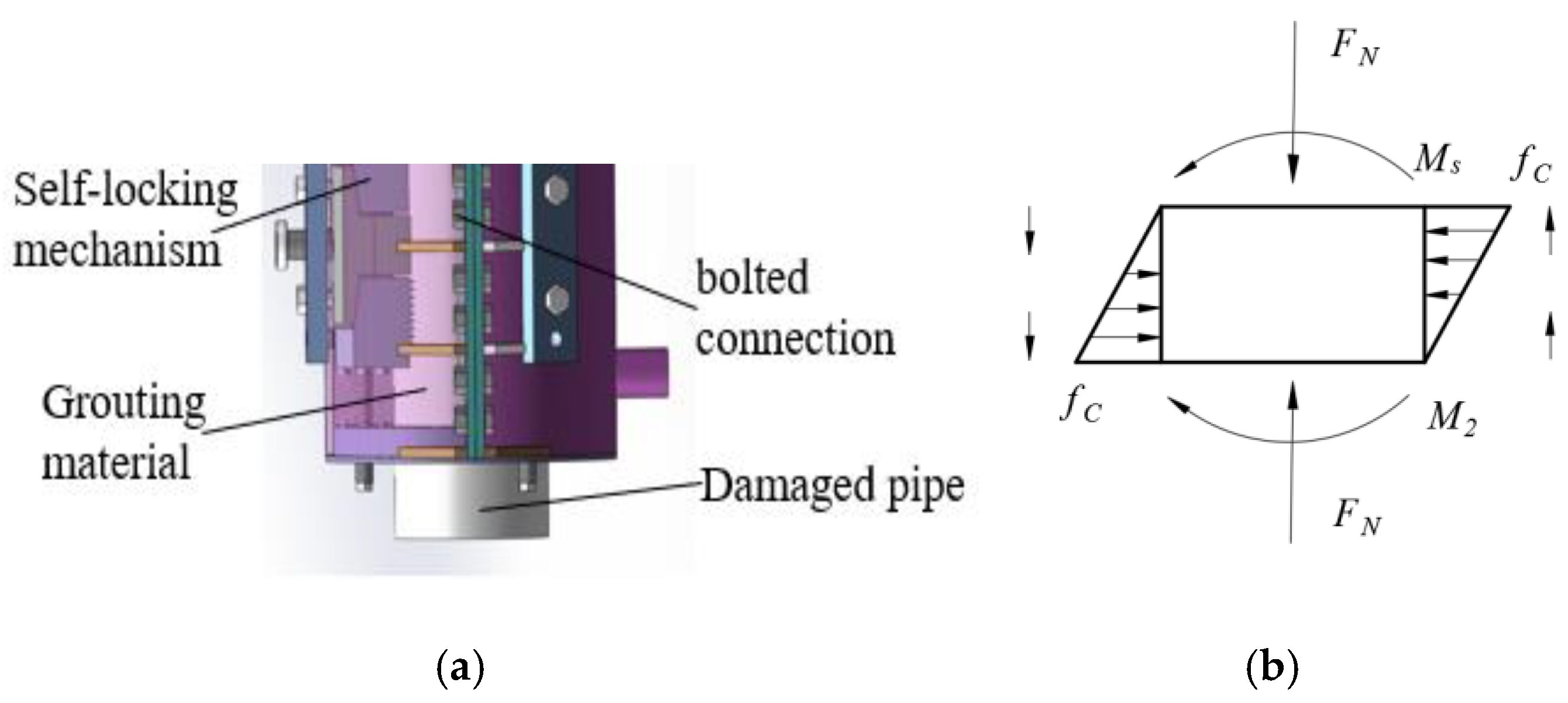
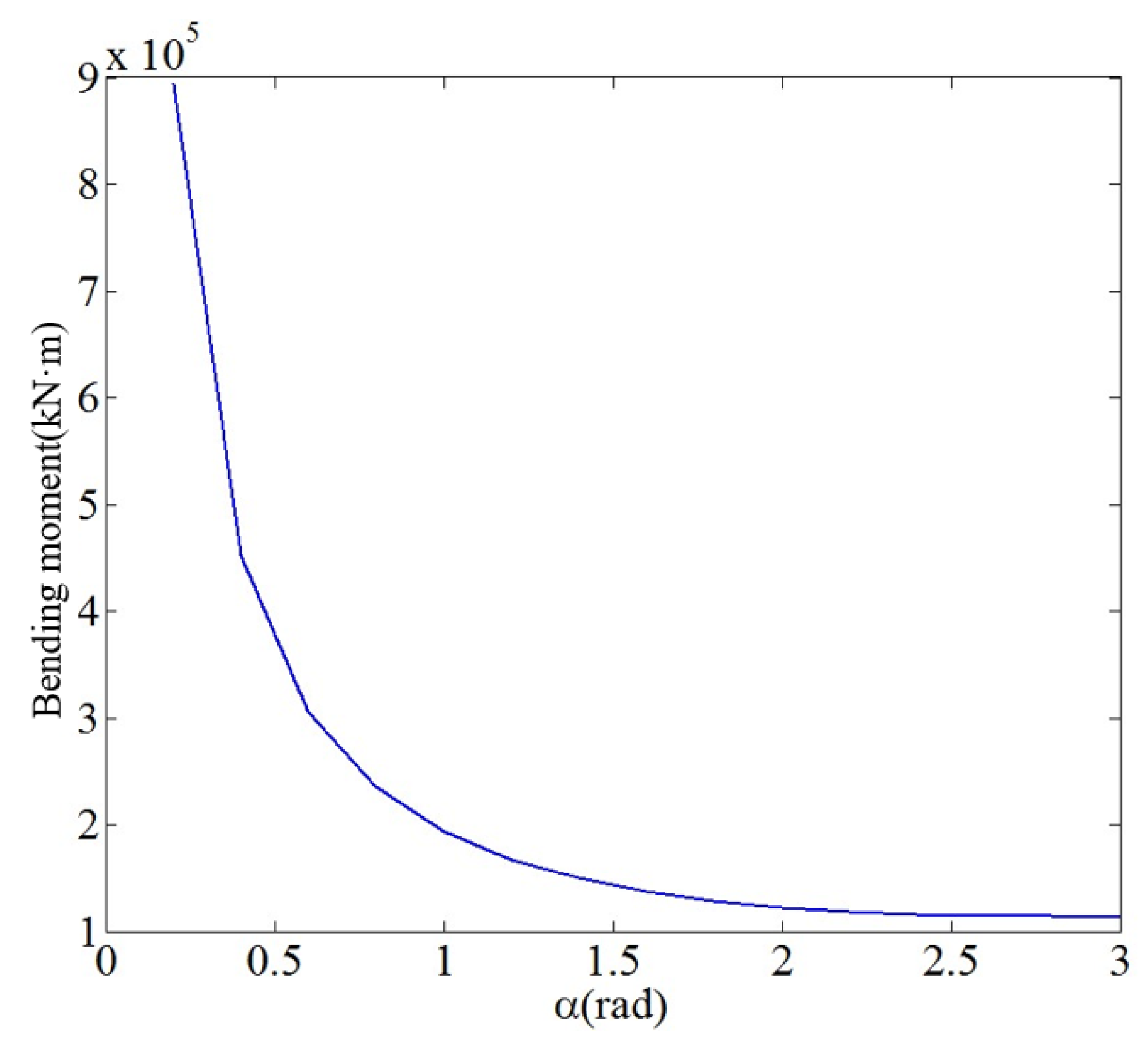
3.2. Analysis of the Moment Bearing Capacity of the Grouting Clamp
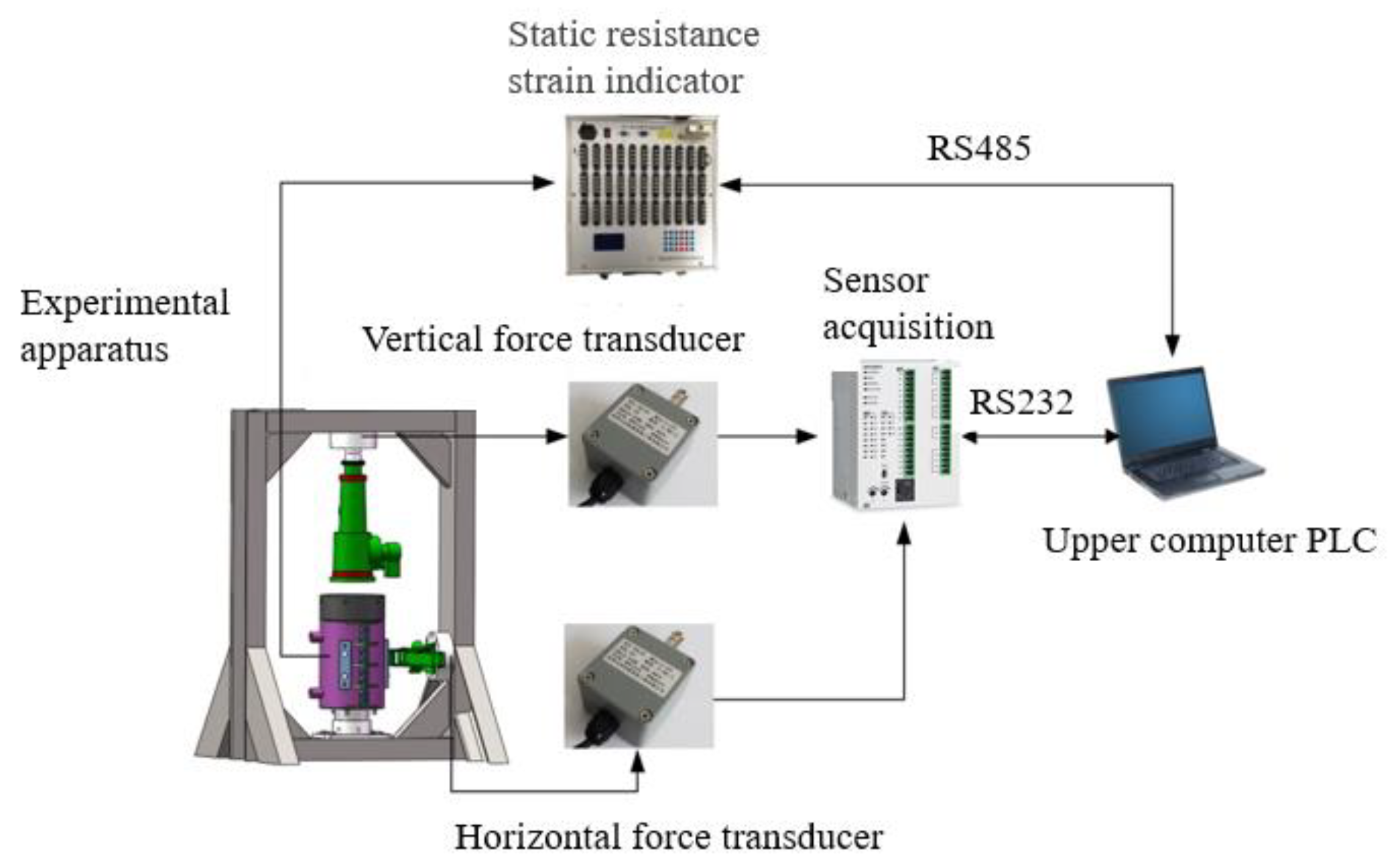
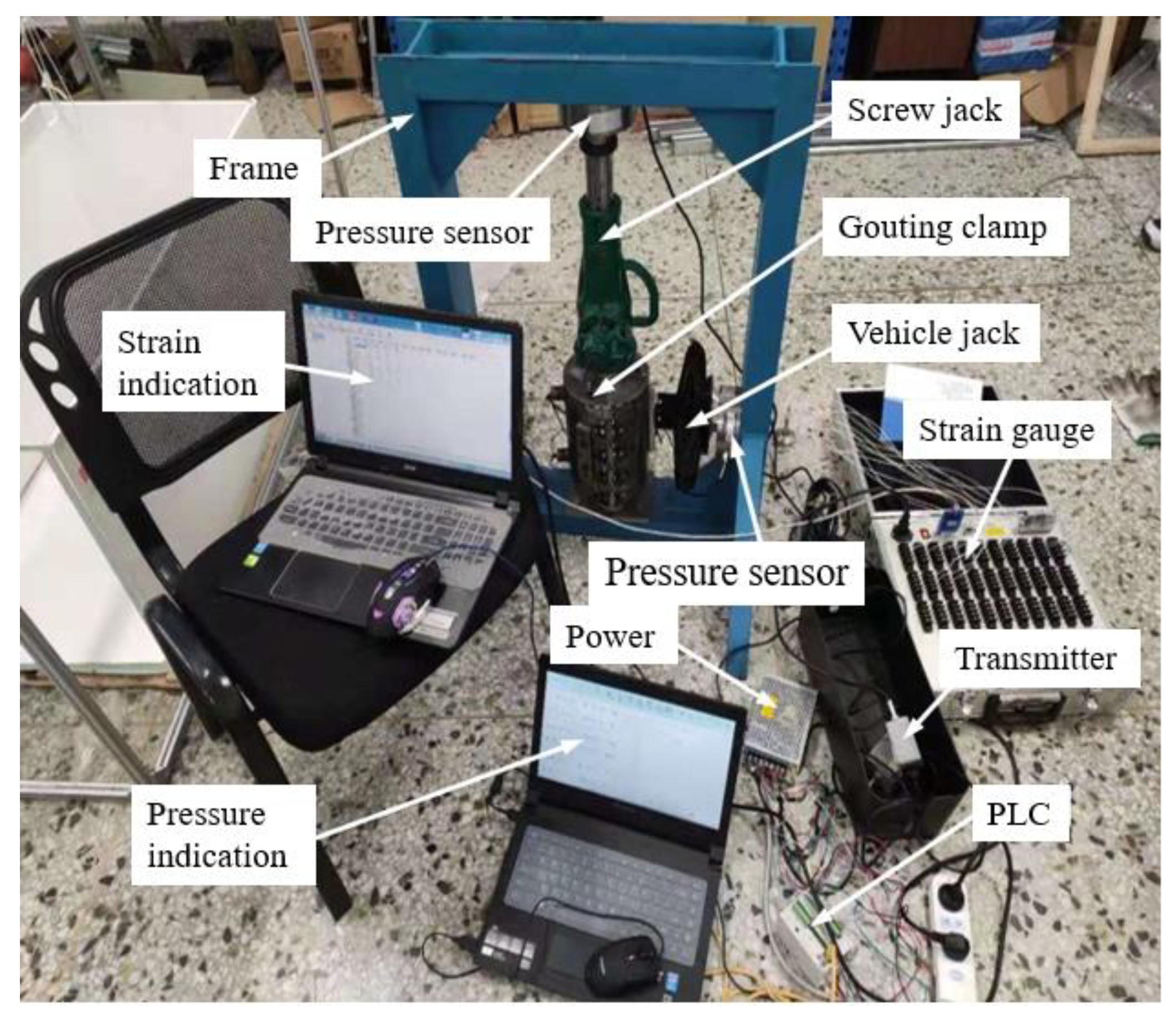
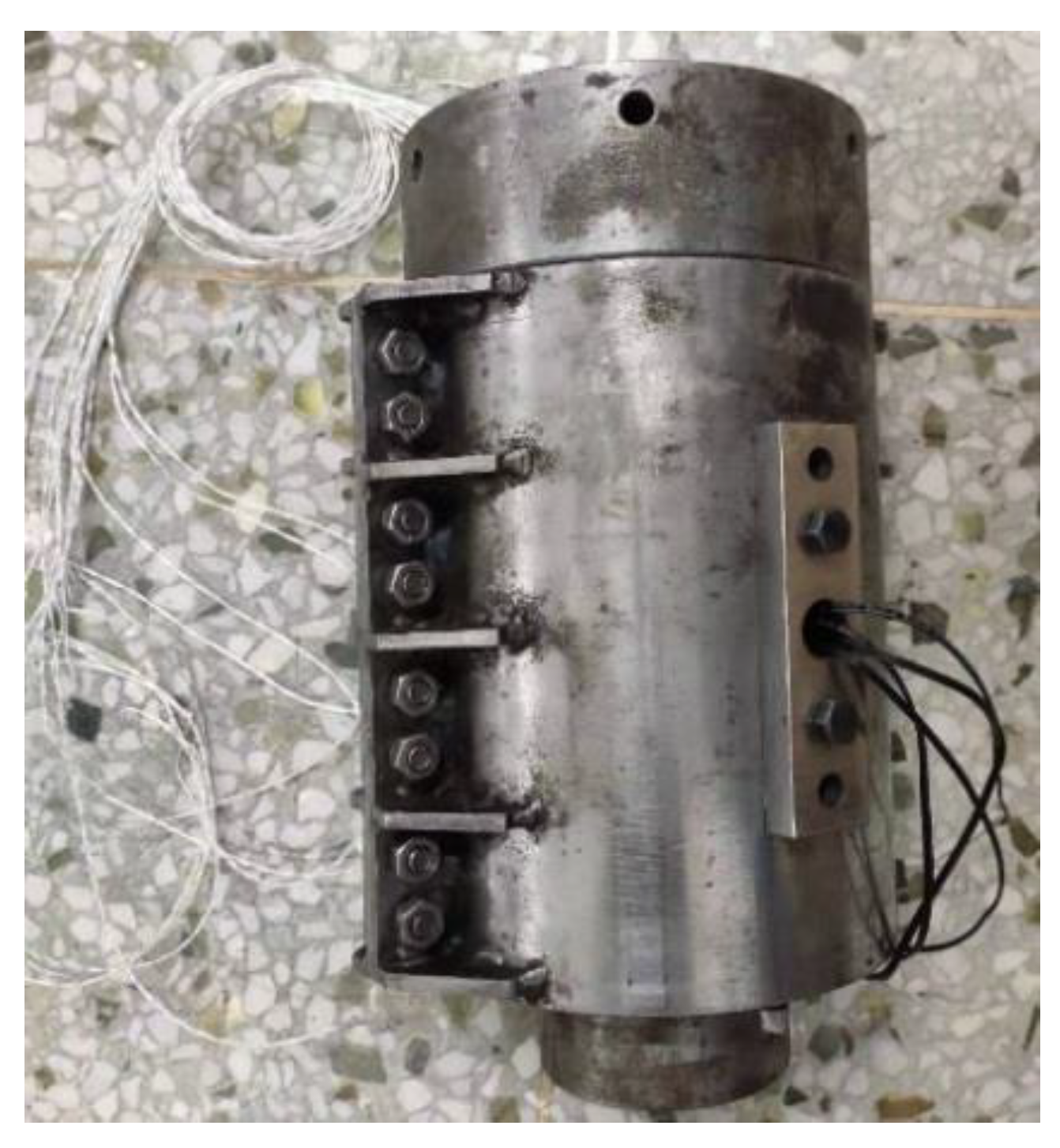
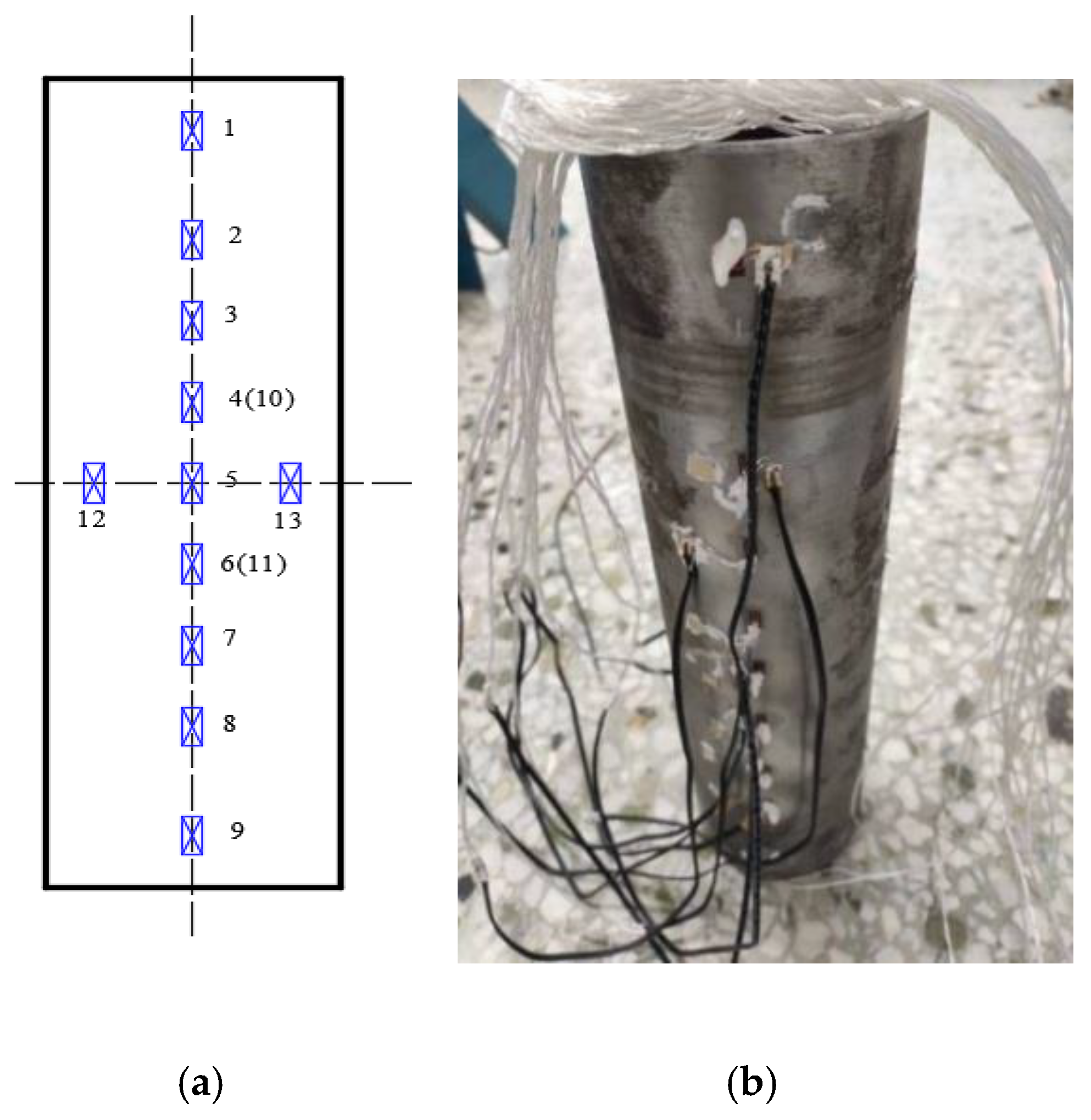
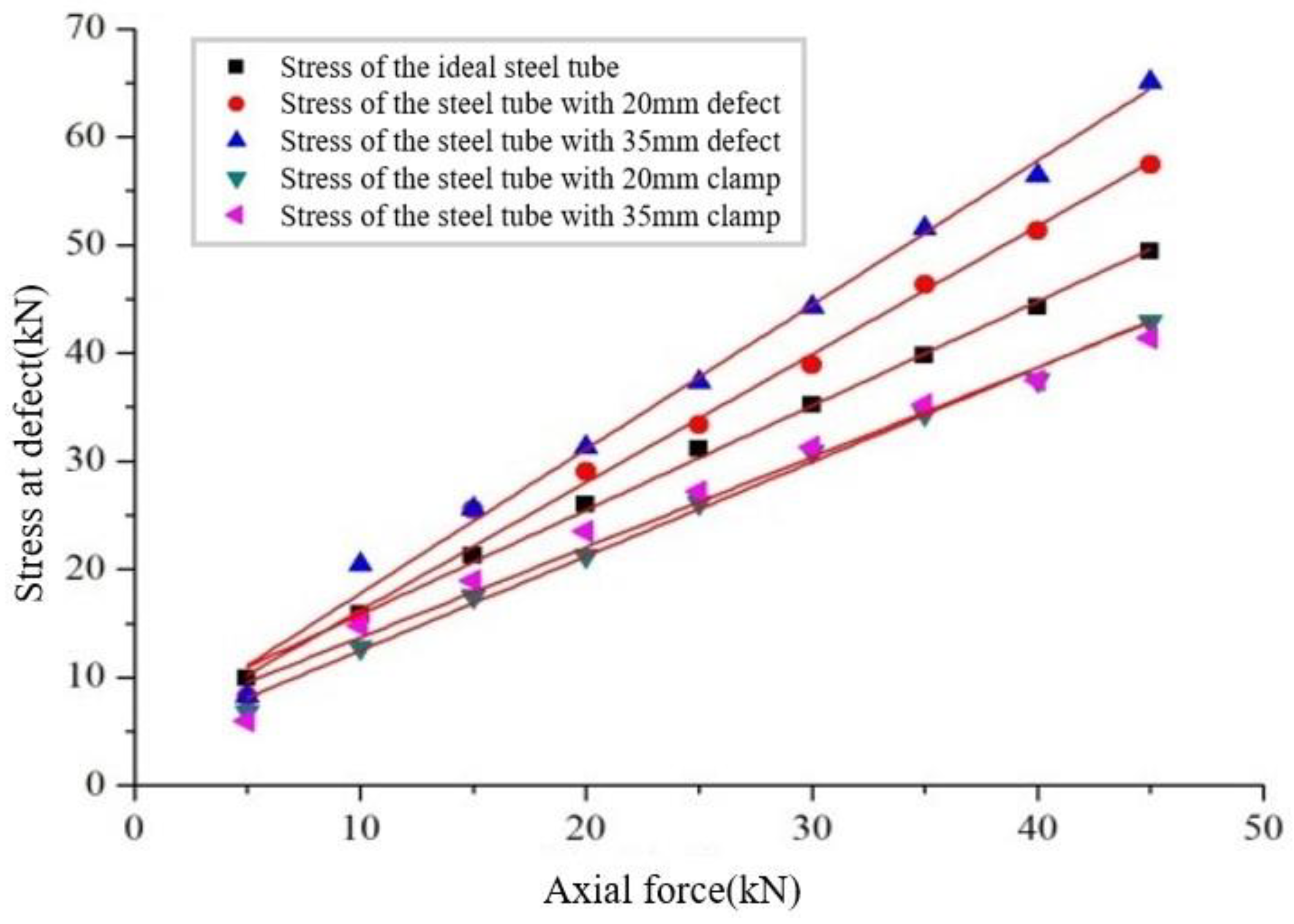
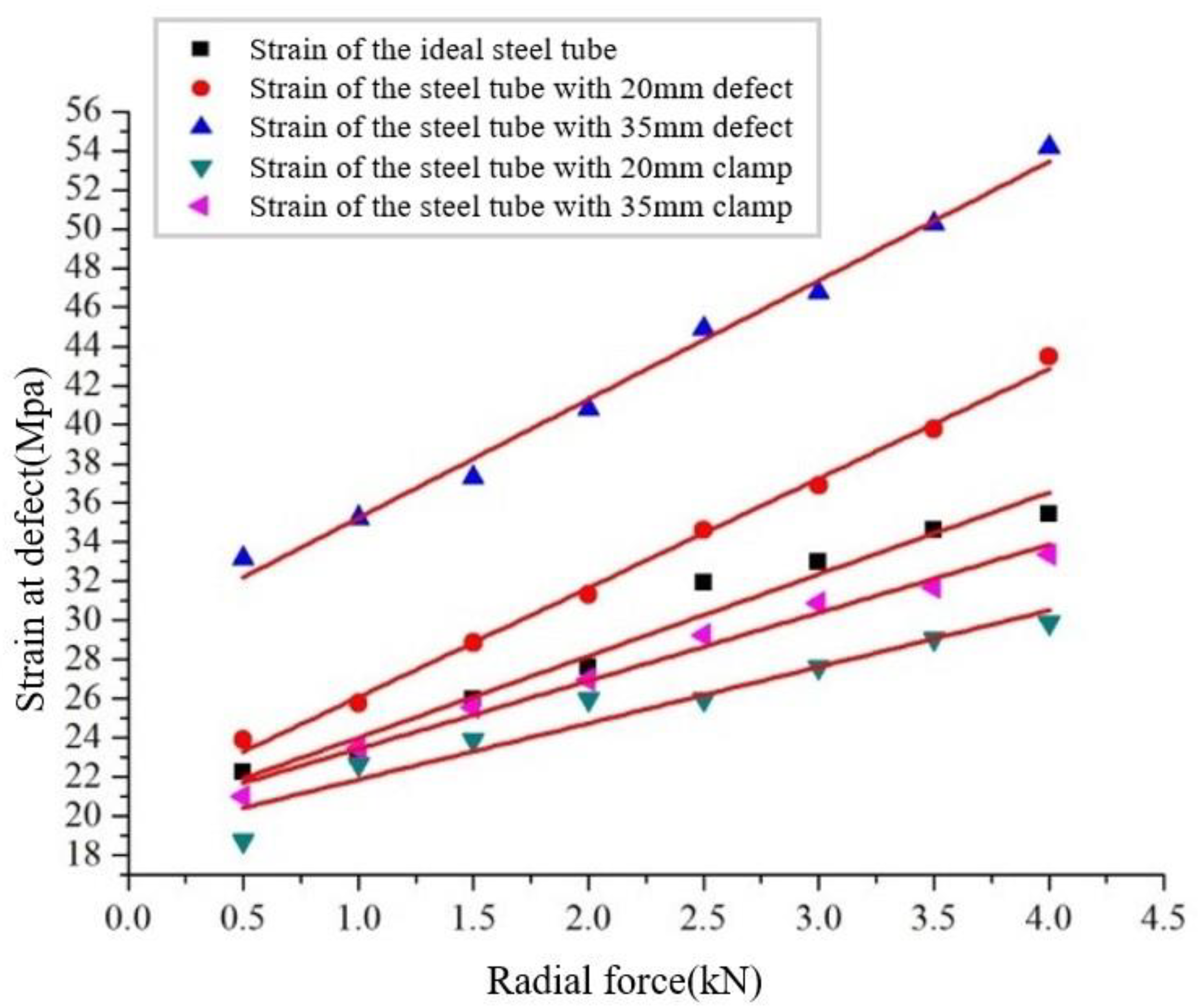
4. Mechanical Experiment Verification of the Grouting Clamp Based on a Type of Wedge Gripping
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ashish, A.; Sudath, C.S.; Ove, M.; Ivar, L. A framework to assess structural integrity of ageing offshore jacket structures for life extension. Mar. Struct. 2017, 562, 37–259. [Google Scholar]
- Gong, S.-F.; Jin, W.; Wang, Q.-Z. Repair and assessment of damaged components of offshore fixed platforms. China Ocean Platf. 2001, 16, 37–41. [Google Scholar]
- Gong, S.-F.; Shen, X.-W.; Li, F.; Wang, Q.-Z. Research on grouting clamp technology for offshore platforms. Ocean Eng. 2001, 19, 32–37. [Google Scholar]
- David, L.; Giovanni, S.; Paul, D. Design of novel drilled-and grouted pile in sand for offshore oil & gas structures. Mar. Struct. 2014, 39, 39–49. [Google Scholar]
- Zhao, X.L.; Grundy, P.; Lee, Y.T. Grout sleeve connections under large deformation cyclic loading. In Proceedings of the Twelfth International Society of Offshore and Polar Engineers, ISOPE, Kitakyushu, Japan, 26–31 May 2002; Volume IV, pp. 53–59. [Google Scholar]
- Jin, W.-L.; Song, J.; Gong, S.-F.; Bai, B.-R. Bearing capacity and reinforcement analysis of damaged components of offshore platform. Eng. Mech. 2003, 20, 37–42. [Google Scholar]
- Zhao, X.L.; Ghojel, J.; Grundy, P.; Han, L.H. Behavior of grouted sleeve connections at elevated temperatures. Thin-Walled Struct. 2006, 447, 751–758. [Google Scholar] [CrossRef]
- Jan, D.; Michael, M. Advanced representation of tubular joints in jacket models for offshore wind turbine simulation. Energy Procedia 2013, 35, 234–243. [Google Scholar]
- Yang, B.; Shi, X.; Li, H.-J. Pressure measurement method of expansion self-stress grouting clamp. Offshore Eng. 2010, 28, 80–85. [Google Scholar]
- Jiang, S.C.; Wang, Z.; Zhao, X.L. Structural Performance of Prestressed Grouted Pile-to-Sleeve Connectionsin. In Proceedings of the Twelfth East Asia-Pacific Conference on Structural Engineering and Construction, Hong Kong, China, 26–28 January 2011; Volume 14. [Google Scholar]
- Samarakoon, S.M.S.M.K.; Ratnayake, R.M.C.; Siriwardane, S.A.S.C. Structural integrity control of ageing offshore structures: Repairing and strengthening with grouted connections. In Proceedings of the Asme 32nd International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 9–14 June 2013; Volume 3. [Google Scholar]
- Djukic, L.P.; Sum, W.S.; Leong, K.H. Development of a fibre reinforced polymer composite clamp for metallic pipeline repair. Mater. Des. 2015, 706, 8–80. [Google Scholar] [CrossRef]
- Sum, W.S.; Leong, K.H.; Djukic, L.P. Design, testing and field deployment of a composite clamp for pipeline repairs. Plast. Rubber Compos. 2016, 45, 81–94. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.H. Interfacial shear behavior of a high-strength pile to sleeve grouted connection. Eng. Struct. 2017, 1517, 704–723. [Google Scholar] [CrossRef]
- Jiao, G.; Zhou, L.; Shi, X.; Fang, K. Load-bearing performance test of large-size model of expansion self-stress grouting clamp. J. Ocean Univ. China 2017, 47, 111–118. [Google Scholar]
- Gunnar, S.; Atle, J. Design recommendations for grouted pile sleeve connections. Mar. Struct. 2018, 601, 1–14. [Google Scholar]
- Johansen, A.; Solland, G.; Lervik, A.; Strande, M.; Nybo, T. Testing of jacket pile sleeve grouted connections exposed to variable axial loads. Mar. Struct. 2018, 582, 254–277. [Google Scholar] [CrossRef]
- Chellappan, N.V.; Nallayarasu, S. Axial and moment carrying capacity of split sleeve grouted connections for repair of tubular member. In Proceedings of the Asme 38th International Conference on Ocean, Offshore and Arctic Engineering, Glasgow, Scotland, 9–14 June 2019; Volume 3. [Google Scholar]
- Wu, X.; An, W. Effect of distributed axisymmetric defects on buckling reliability of thin-walled cylindrical shells. J. Harbin Eng. Univ. 2009, 30, 635–638. [Google Scholar]
- Yang, X. Experimental study on flexural behavior of corroded reinforced concrete beams. J. Nat. Disasters 2018, 27, 70–78. [Google Scholar]
- Yuan, Y.; Jia, F.; Cai, Y. Degradation of mechanical properties of corroded steel bars. Ind. Archit. 2000, 30, 43–46. [Google Scholar]
- Wang, X.Q.; Zhang, S.M.; Liao, J.; Huang, Y.S. Research and development on similarity principle of model pile. In Applied Mechanics and Materials; Trans Tech Publications Ltd.: Stafa-Zurich, Switzerland, 2014; Volume 580–583. [Google Scholar]




















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, B.; Zhang, Q.R.; Wang, T.; Wang, Z. Research on the Bearing Capacity of a Damaged Jacket Repaired by a Grouting Clamp Based on a Type of Wedge Gripping. J. Mar. Sci. Eng. 2020, 8, 973. https://doi.org/10.3390/jmse8120973
Zhang B, Zhang QR, Wang T, Wang Z. Research on the Bearing Capacity of a Damaged Jacket Repaired by a Grouting Clamp Based on a Type of Wedge Gripping. Journal of Marine Science and Engineering. 2020; 8(12):973. https://doi.org/10.3390/jmse8120973
Chicago/Turabian StyleZhang, Bo, Qing Rui Zhang, Tao Wang, and Zhuo Wang. 2020. "Research on the Bearing Capacity of a Damaged Jacket Repaired by a Grouting Clamp Based on a Type of Wedge Gripping" Journal of Marine Science and Engineering 8, no. 12: 973. https://doi.org/10.3390/jmse8120973