Rogue Wave Formation in Adverse Ocean Current Gradients

Abstract
:1. Introduction
2. The CFD Model
3. Methodology
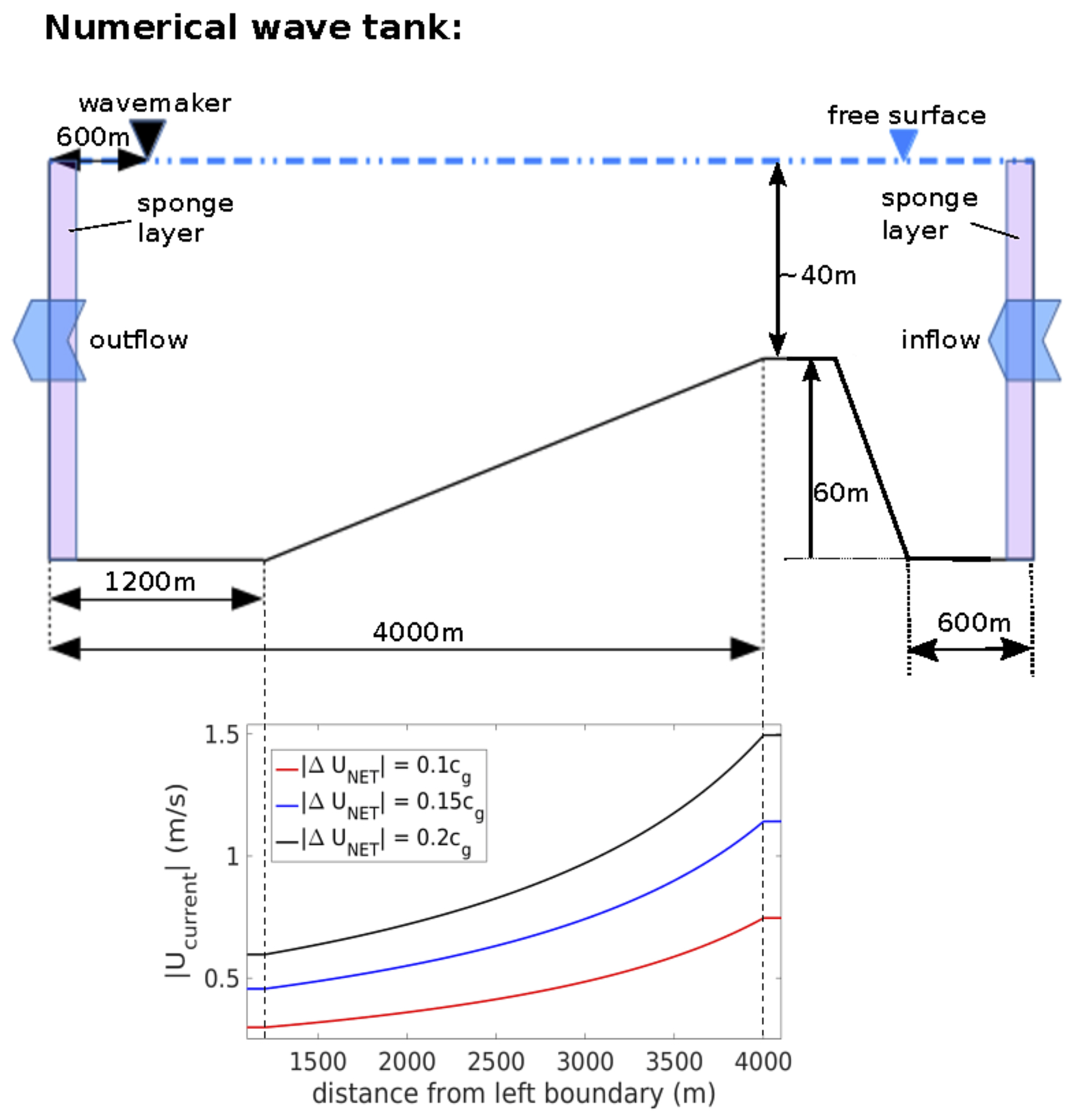
3.1. Model Setup
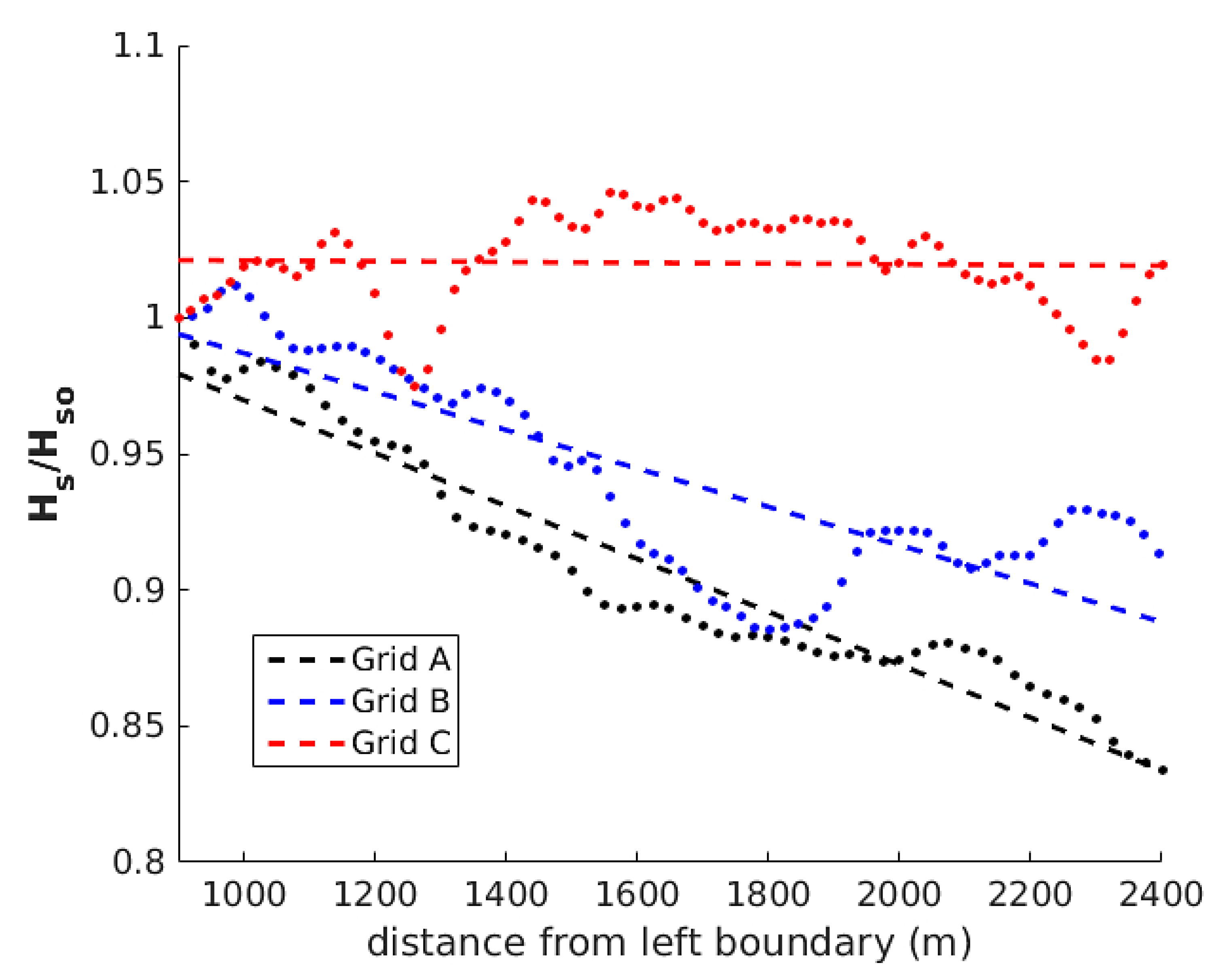
3.2. Grid Resolution and Convergence Testing
4. Results
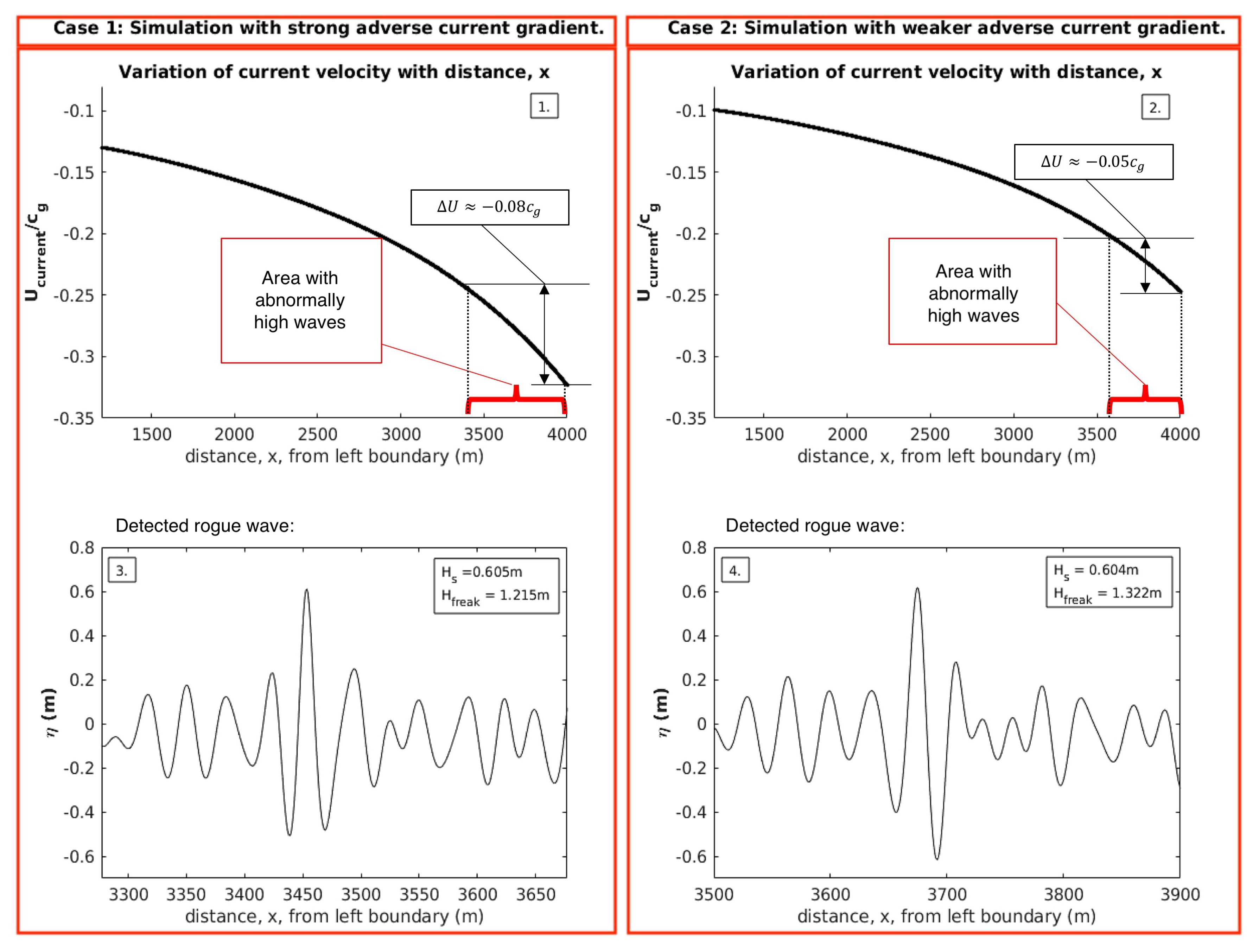
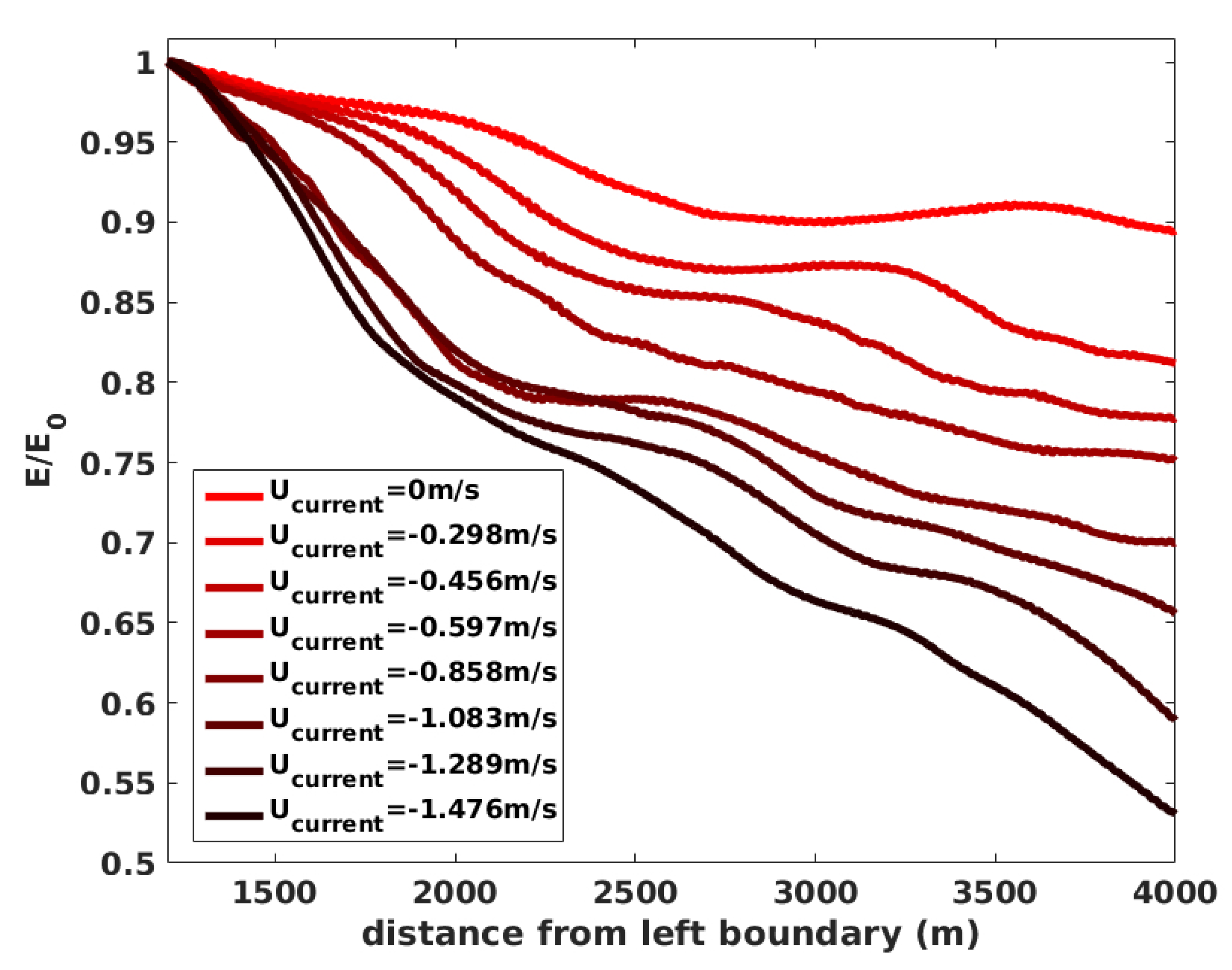
4.1. Qualitative Analysis: Observation of Rogue Waves and of Changes in Wave Characteristics Induced by Adverse Current Gradients
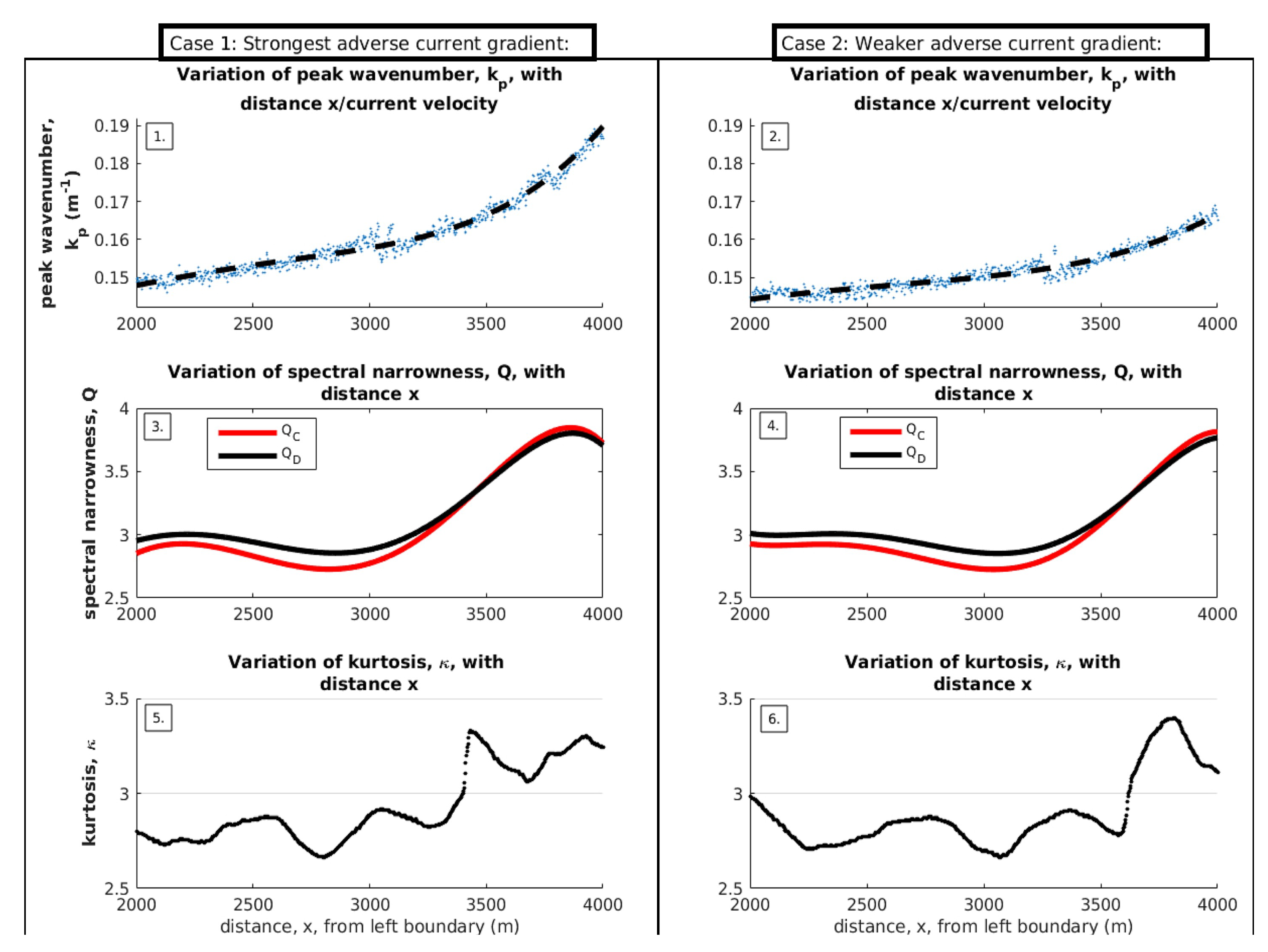
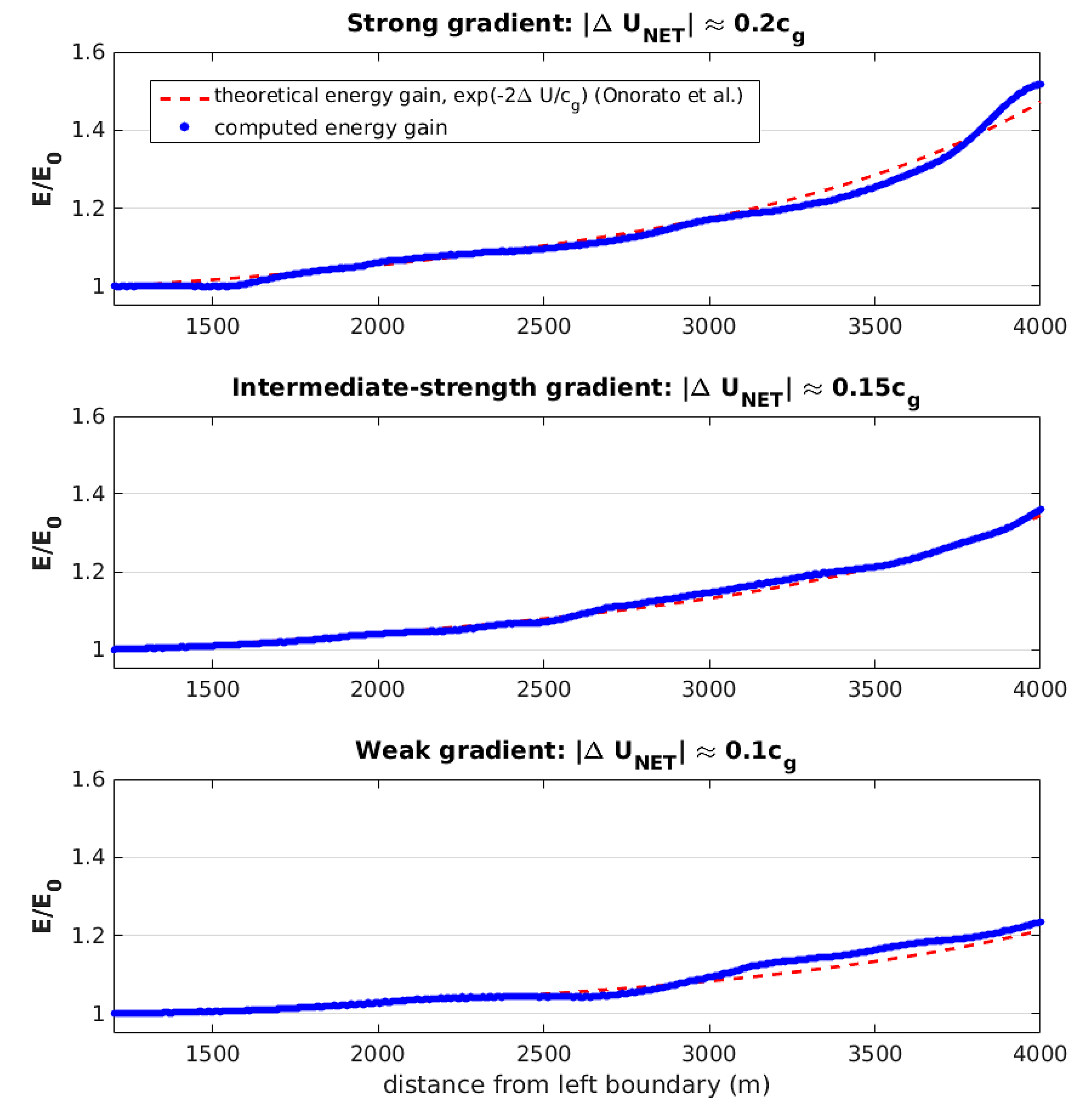
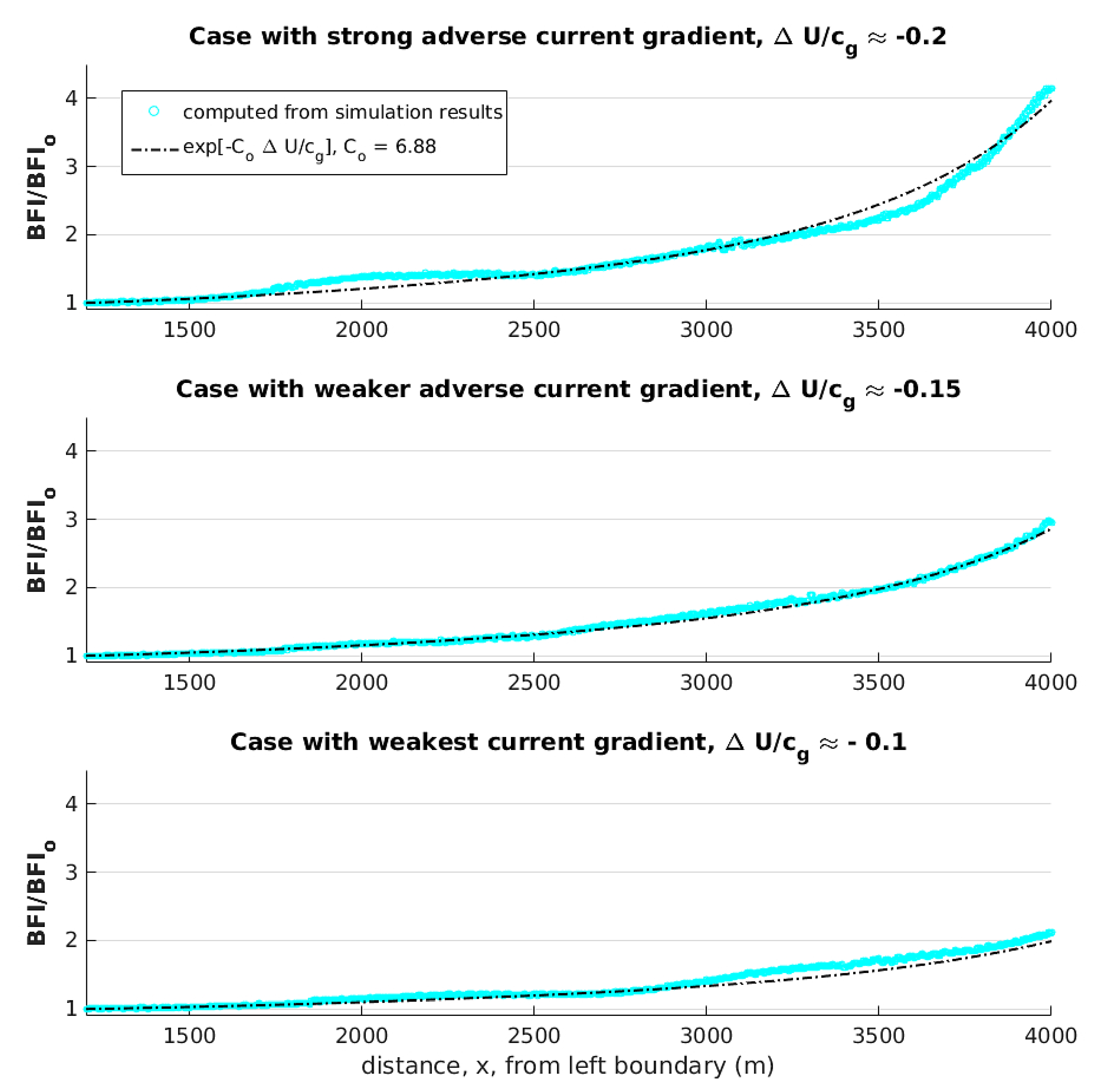
4.2. Quantitative Analysis: Estimating Current Gradient-Induced Energy Gain and BFI Increase
5. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Procedure for Correcting/Calibrating the Model for Numerical Dissipation

References
- Benjamin, T.B.; Feir, J.E. The disintegration of wave trains on deep water: Part 1. Theory. J. Fluid Mech. 1967, 27, 417–430. [Google Scholar] [CrossRef]
- Kharif, C.; Pelinovsky, E. Physical mechanisms of the rogue wave phenomenon. Eur. J. Mech. B Fluids 2003, 22, 603–634. [Google Scholar] [CrossRef] [Green Version]
- Manzetti, S. Mathematical modeling of rogue waves: A survey of recent and emerging mathematical methods and solutions. Axioms 2018, 7, 42. [Google Scholar] [CrossRef]
- Tulin, M.; Waseda, T. Laboratory observations of wave group evolution, including breaking effects. J. Fluid Mech. 1999, 378, 197–232. [Google Scholar] [CrossRef]
- Waseda, T.; Tulin, M. Experimental study of the stability of deep-water wave trains including wind effects. J. Fluid Mech. 1999, 401, 55–84. [Google Scholar] [CrossRef]
- Chabchoub, A.; Hoffman, N.P.; Akhmediev, N. Rogue wave observation in a water wave tank. Phys. Rev. Lett. 2011, 106, 204502. [Google Scholar] [CrossRef]
- Babanin, A.V.; Rogers, W.E. Generation and limiters of rogue waves. Int. J. Ocean Clim. Syst. 2014, 5, 39–49. [Google Scholar] [CrossRef]
- Babanin, A.V.; Waseda, T.; Shugan, I.; Hwung, H.-H. Modulational instability in directional wave fields, and extreme wave events. In Proceedings of the ASME 2011 30th International Conference on Ocean, Offshore and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011. [Google Scholar]
- Babanin, A.V.; Waseda, T.; Kinoshita, T.; Toffoli, A. Wave breaking in directional wave fields. J. Phys. Oceanogr. 2011, 41, 145–156. [Google Scholar] [CrossRef]
- Janssen, P.A.E.M. Nonlinear four-wave interactions and freak waves. J. Phys. Oceanogr. 2003, 33, 863–884. [Google Scholar] [CrossRef]
- Ankiewicz, A.; Crespo, J.M.S.; Chowdhury, M.A.; Akhmediev, N. Rogue waves in optical fibers in presence of third-order dispersion, self-steepening, and self-frequency shift. J. Opt. Soc. Am. B 2013, 30, 87–94. [Google Scholar] [CrossRef]
- Hjelmervik, K.B.; Trulsen, K. Freak wave statistics on collinear currents. J. Fluid Mech. 2009, 637, 267–284. [Google Scholar] [CrossRef]
- Adcock, T.A.A.; Taylor, P.H. The physics of anomalous (‘rogue’) ocean waves. Rep. Prog. Phys. 2014, 77, 105901. [Google Scholar] [CrossRef]
- Zakharov, V. Stability of periodic waves of finite amplitude on the surface of a deep fluid. J. Appl. Mech. Tech. Phys. 1968, 9, 190–194. [Google Scholar] [CrossRef]
- Onorato, M.; Osborne, A.R.; Serio, M.; Bertone, S. Freak waves in random oceanic sea states. Phys. Rev. Lett. 2001, 86, 5831. [Google Scholar] [CrossRef]
- Mori, M.; Janssen, P.A.E.M. On kurtosis and occurrence probability of freak waves. J. Phys. Oceanogr. 2006, 36, 1471–1483. [Google Scholar] [CrossRef]
- Lavrenov, I.V. The wave energy concentration at the Agulhas current off South Africa. Nat. Hazards 1998, 17, 117–127. [Google Scholar] [CrossRef]
- Onorato, M.; Proment, D.; Toffoli, A. Triggering rogue waves in opposing currents. Phys. Rev. Lett. 2011, 107, 184502. [Google Scholar] [CrossRef]
- Ruban, V.P. On the nonlinear schrödinger equation for waves on a nonuniform current. JETP Lett. 2012, 95, 486–491. [Google Scholar] [CrossRef]
- Ma, Y.; Ma, X.; Perlin, M.; Dong, G. Extreme waves generated by modulational instability on adverse currents. Phys. Fluids 2013, 25, 114109. [Google Scholar] [CrossRef]
- Toffoli, A.; Waseda, T.; Houtani, H.; Kinoshita, T.; Collins, K.; Proment, D.; Onorato, M. Excitation of rogue waves in a variable medium: An experimental study on the interaction of water waves and currents. Phys. Rev. E 2013, 87, 051201. [Google Scholar] [CrossRef] [Green Version]
- Toffoli, A.; Waseda, T.; Houtani, H.; Cavaleri, L.; Greaves, D.; Onorato, M. Rogue waves in opposing currents: An experimental study on the deterministic and stochastic wave trains. J. Fluid Mech. 2015, 769, 277–297. [Google Scholar] [CrossRef]
- Toffoli, A.; Cavaleri, L.; Babanin, A.V.; Benoit, M.; Bitner-Gregersen, E.M.; Monbaliu, J.; Onorato, M.; Osborne, A.R.; Stansberg, C.T. Occurence of extreme waves in three-dimensional mechanically generated wave fields propagating over an oblique current. Nat. Hazards Earth Syst. Sci. NHESS 2011, 11, 895–903. [Google Scholar] [CrossRef]
- Shrira, V.I.; Slunyaev, A.V. Nonlinear dynamics of trapped waves on jet currents and rogue waves. Phys. Rev. E 2014, 89, 041002. [Google Scholar] [CrossRef]
- Ablowitz, M.J.; Baldwin, D.E. Nonlinear shallow ocean-wave soliton interactions on flat beaches. Phys. Rev. E 2012, 86, 036305. [Google Scholar] [CrossRef] [PubMed]
- Gerber, M. The Benjamin-Feir instability of a deep-water Stokes wavepacket in the presence of a non-uniform medium. J. Fluid Mech. 1987, 176, 311–332. [Google Scholar] [CrossRef]
- Ardhuin, F.; Gille, S.T.; Menemenlis, D.; Rocha, C.B.; Rascle, N.; Chapron, B.; Gula, J.; Molemaker, J. Small-scale open ocean currents have large effects on wind wave heights. J. Geophys. Res. Oceans 2017, 122, 4500–4517. [Google Scholar] [CrossRef] [Green Version]
- Romero, L.; Lenain, L.; Melville, W.K. Observations of surface wave-current interaction. J. Phys. Oceanogr. 2017, 47, 615–632. [Google Scholar] [CrossRef]
- Ma, G.; Shi, F.; Kirby, J.T. Shock-capturing non-hydrostatic model for fully dispersive surface wave processes. Ocean Model. 2012, 43–44, 22–35. [Google Scholar] [CrossRef]
- Hirsch, C. Numerical Computation of internal & external flows. In The Fundamentals of Computational Fluid Dynamics, 2nd ed.; Butterworth-Heinemann: Burlington, MA, USA, 2007; ISBN 978-0-7506-6594-0. [Google Scholar]
- Harten, A.; Lax, P.D.; Van Leer, B. On upstream differencing and Godunov-type schmes for hyperbolic conservation laws. SIAM Rev. 1983, 25, 35–61. [Google Scholar] [CrossRef]
- Derakhti, M.; Kirby, J.T.; Shi, M.G. NHWAVE: Model Revisions and Tests on Wave Breaking in Shallow and Deep Water; Research Report No. CACR-15-8; University of Delaware: Newark, DE, USA, 2015. [Google Scholar]
- Ardhuin, F.; Chapron, B.; Collard, F. Observation of swell dissipation across oceans. J. Geophys. Res. Oceans 2017, 36, 1–5. [Google Scholar] [CrossRef]
- Gross, M.G. Oceanography, 6th ed.; Merrill: Columbus, OH, USA, 1990. [Google Scholar]
- Rogers, W.E.; Van Vledder, G.P. Frequency width in predictions of windsea spectra and the role of the nonlinear solver. Ocean Model. 2013, 70, 52–61. [Google Scholar] [CrossRef]
- Goda, Y. Numerical experiments on wave statistics with spectral simulation. Rep. Port Harb. Res. Inst. 1970, 9, 57. [Google Scholar]
- Mori, N.; Onorato, M.; Janssen, P.A.E.M. On the estimation of the kurtosis in directional sea states for freak wave forecasting. J. Phys. Oceanogr. 2011, 41, 1484–1497. [Google Scholar] [CrossRef]
- Ribal, A.; Babanin, A.V.; Young, I.; Toffoli, A. Recurrent solutions of the Alber equation initialized by Joint North Sea Project spectra. J. Fluid Mech. 2013, 719, 314–344. [Google Scholar] [CrossRef]
- Rap, A.; Ghosh, S.; Smith, H.M. Shepard and Hardy Multiquadric Interpolation Methods for Multicomponent Aerosol-Cloud Parametrization. J. Atmos. Sci. 2009, 66, 105–115. [Google Scholar] [CrossRef]
| 1. | The authors made a minor correction to their original formula [22]. |







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grid | (m) | (m) |
|---|---|---|
| A | 0.25 | 4.0 |
| B | 0.22 | 2.0 |
| C | 0.20 | 1.33 |
| Dispersion Error | Grid A | Grid B | Grid C |
|---|---|---|---|
| 1.050 | 0.954 | 0.973 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Manolidis, M.; Orzech, M.; Simeonov, J. Rogue Wave Formation in Adverse Ocean Current Gradients. J. Mar. Sci. Eng. 2019, 7, 26. https://doi.org/10.3390/jmse7020026
Manolidis M, Orzech M, Simeonov J. Rogue Wave Formation in Adverse Ocean Current Gradients. Journal of Marine Science and Engineering. 2019; 7(2):26. https://doi.org/10.3390/jmse7020026
Chicago/Turabian StyleManolidis, Michail, Mark Orzech, and Julian Simeonov. 2019. "Rogue Wave Formation in Adverse Ocean Current Gradients" Journal of Marine Science and Engineering 7, no. 2: 26. https://doi.org/10.3390/jmse7020026