
Bottom Multi-Parameter Bayesian Inversion Based on an Acoustic Backscattering Model
 ,
,
Abstract
:1. Introduction
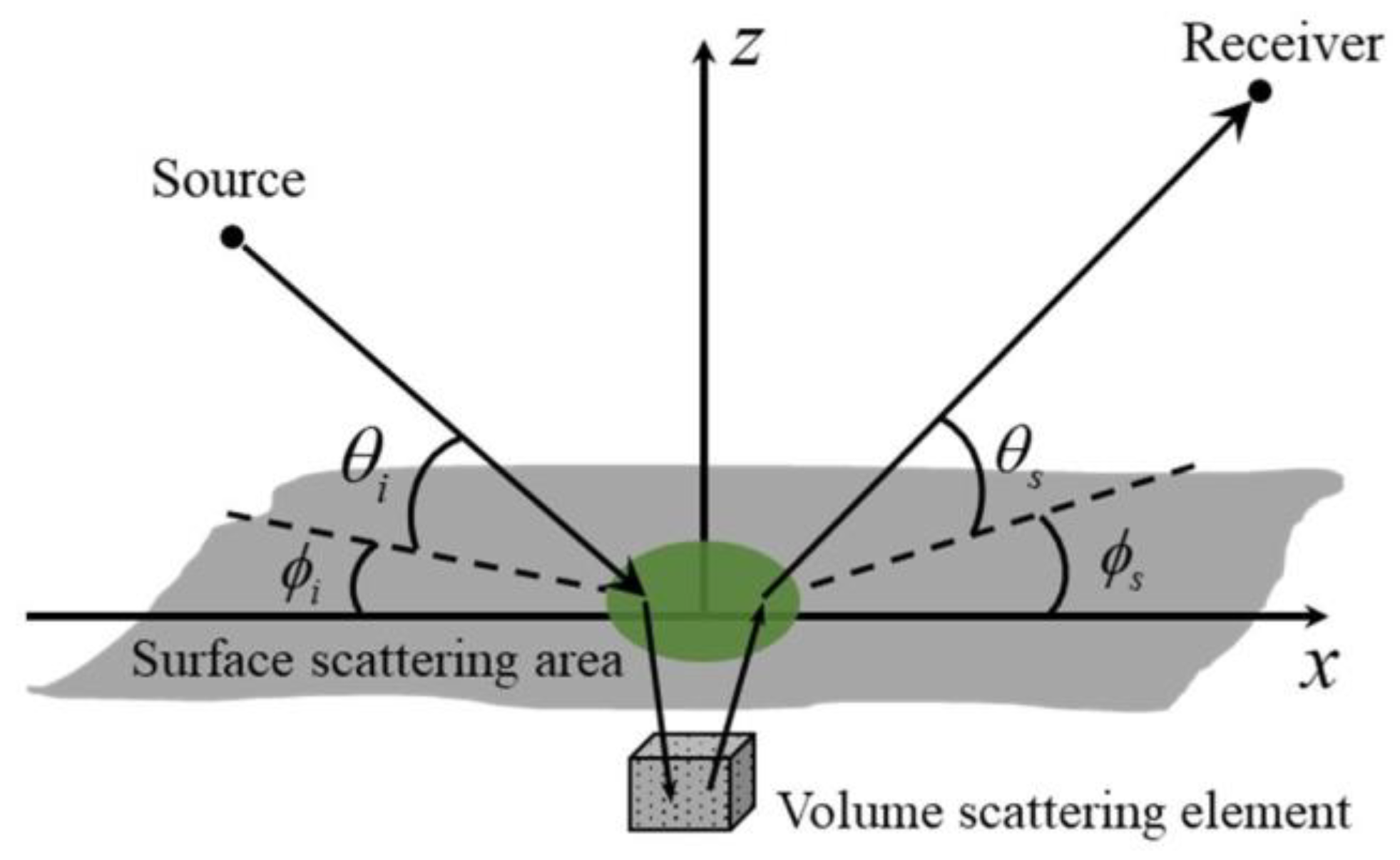
2. Acoustic Backscattering Model
2.1. Roughness Scattering Model
2.2. Volume Scattering Model
3. Inversion Theory
3.1. Bayesian Inversion Theory
3.2. Objective Function and Sampling Method
4. Numerical Simulation and Analysis
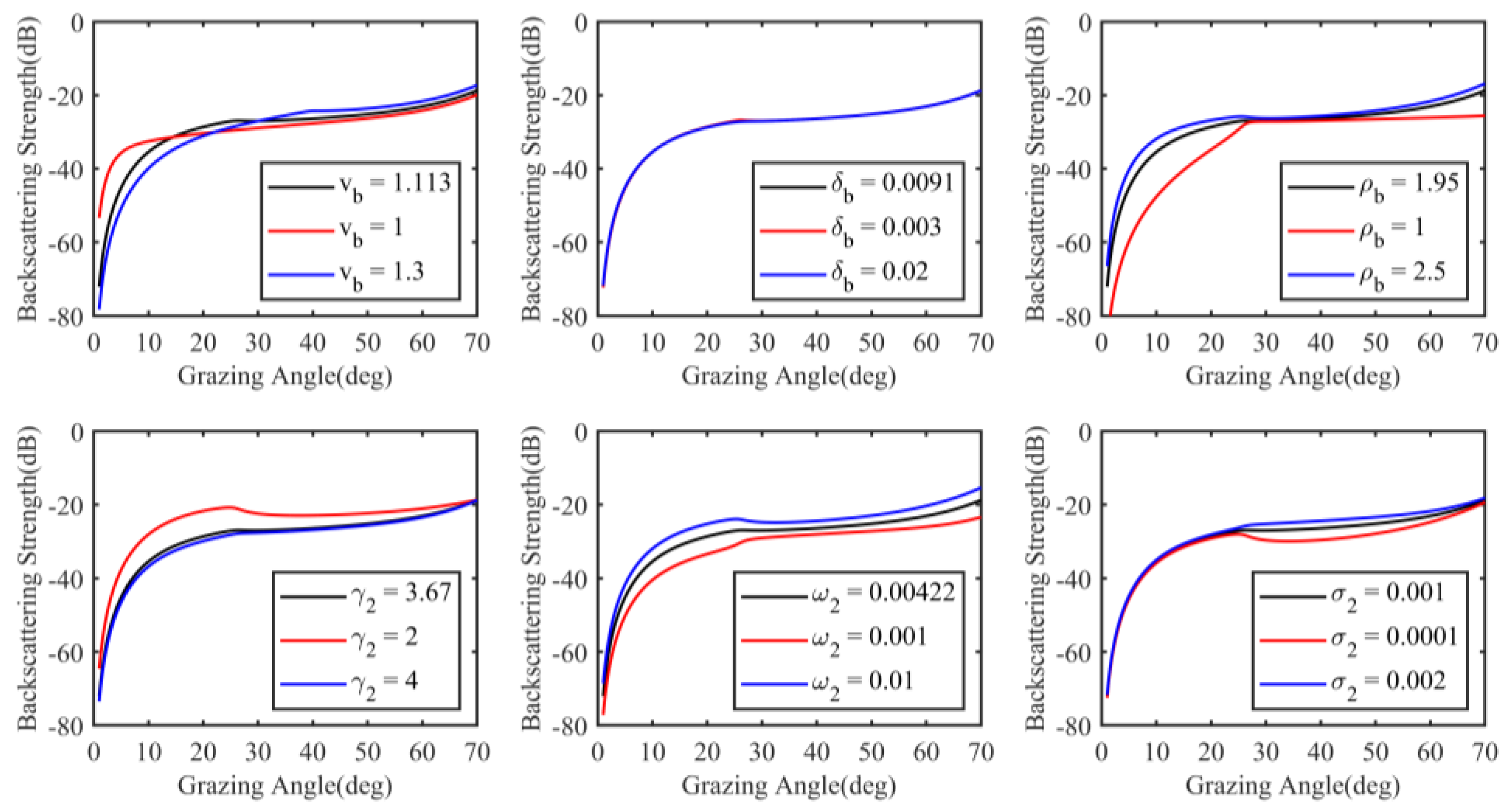
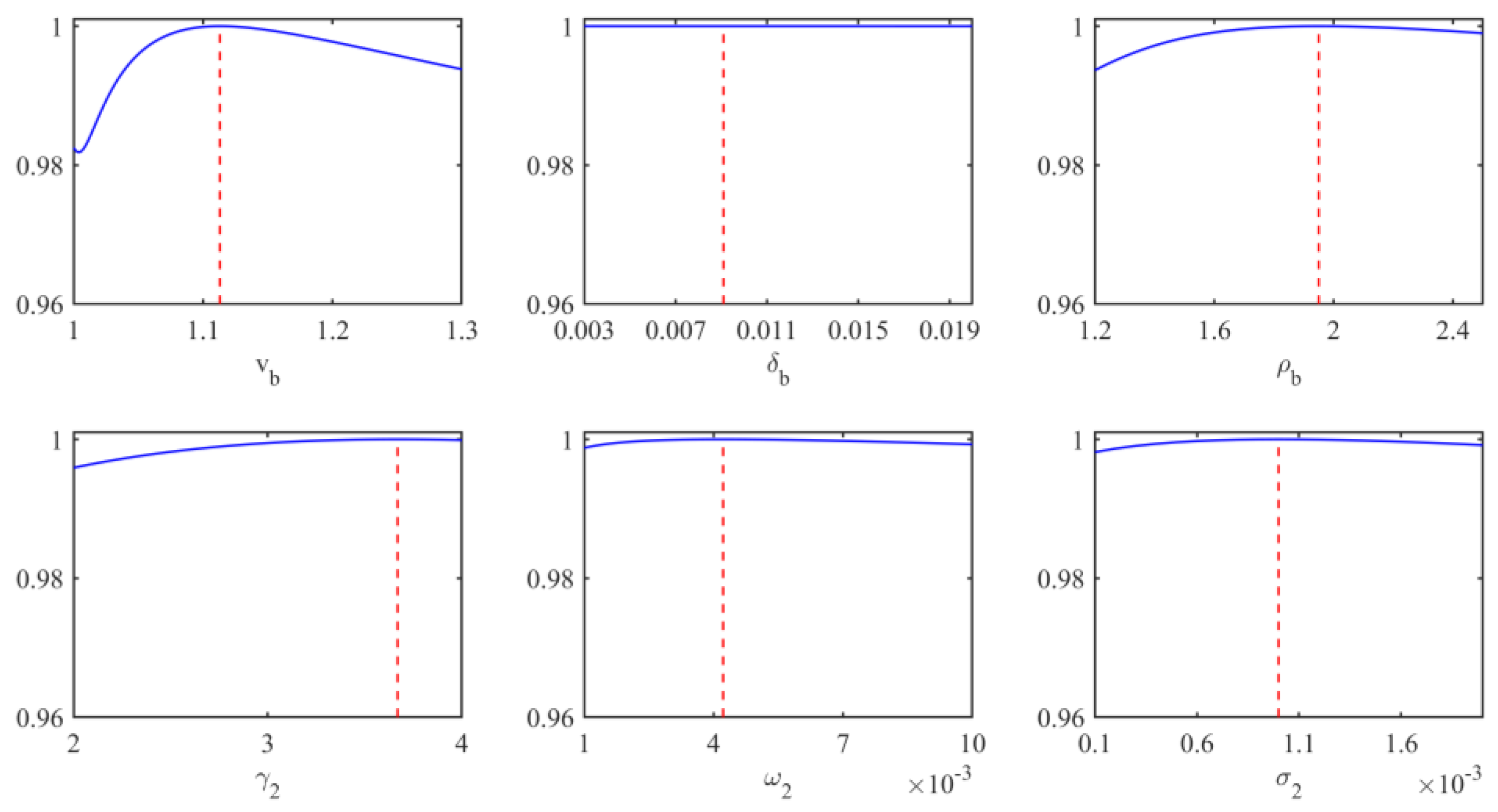
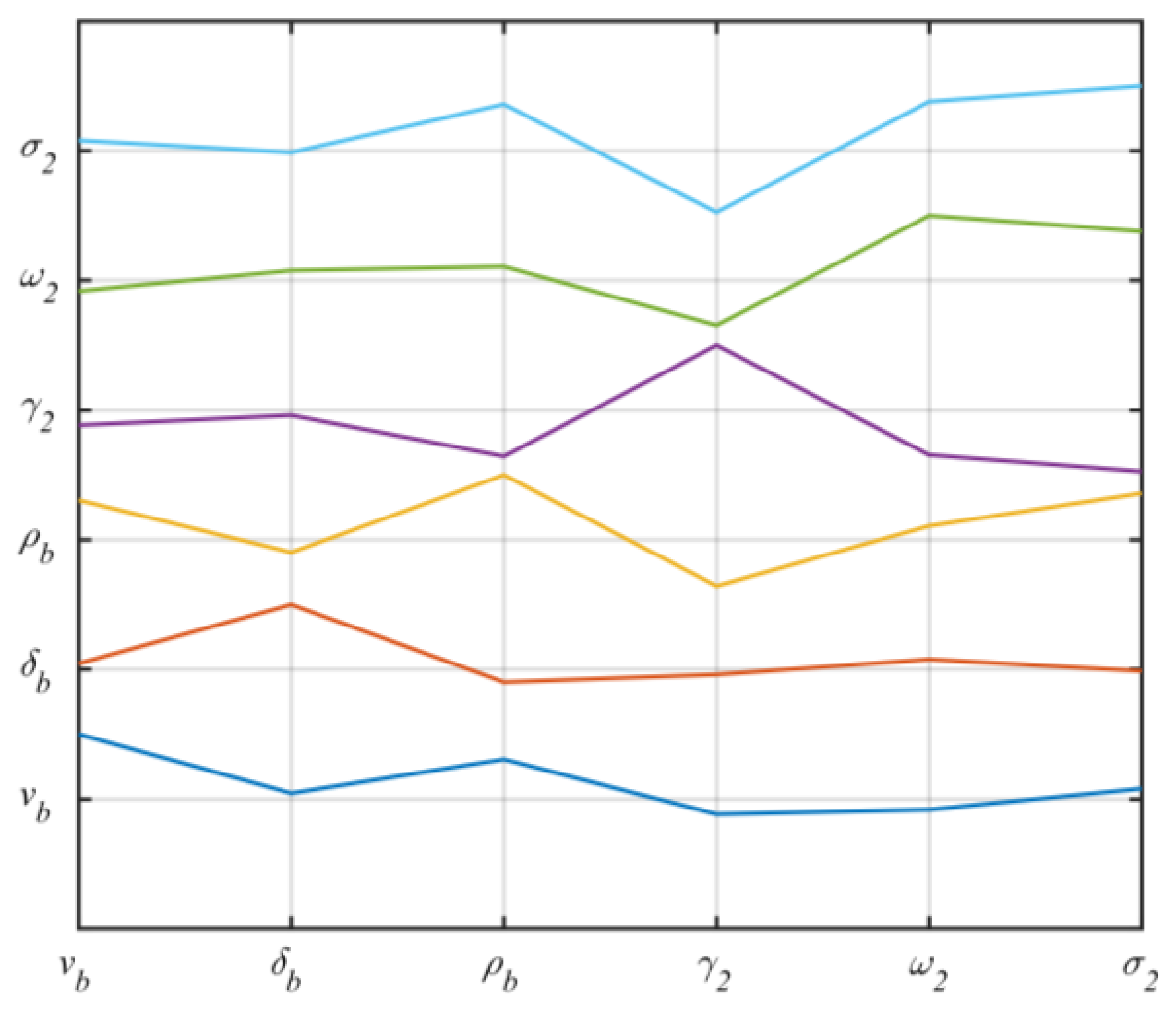
4.1. Sensitivity Analysis
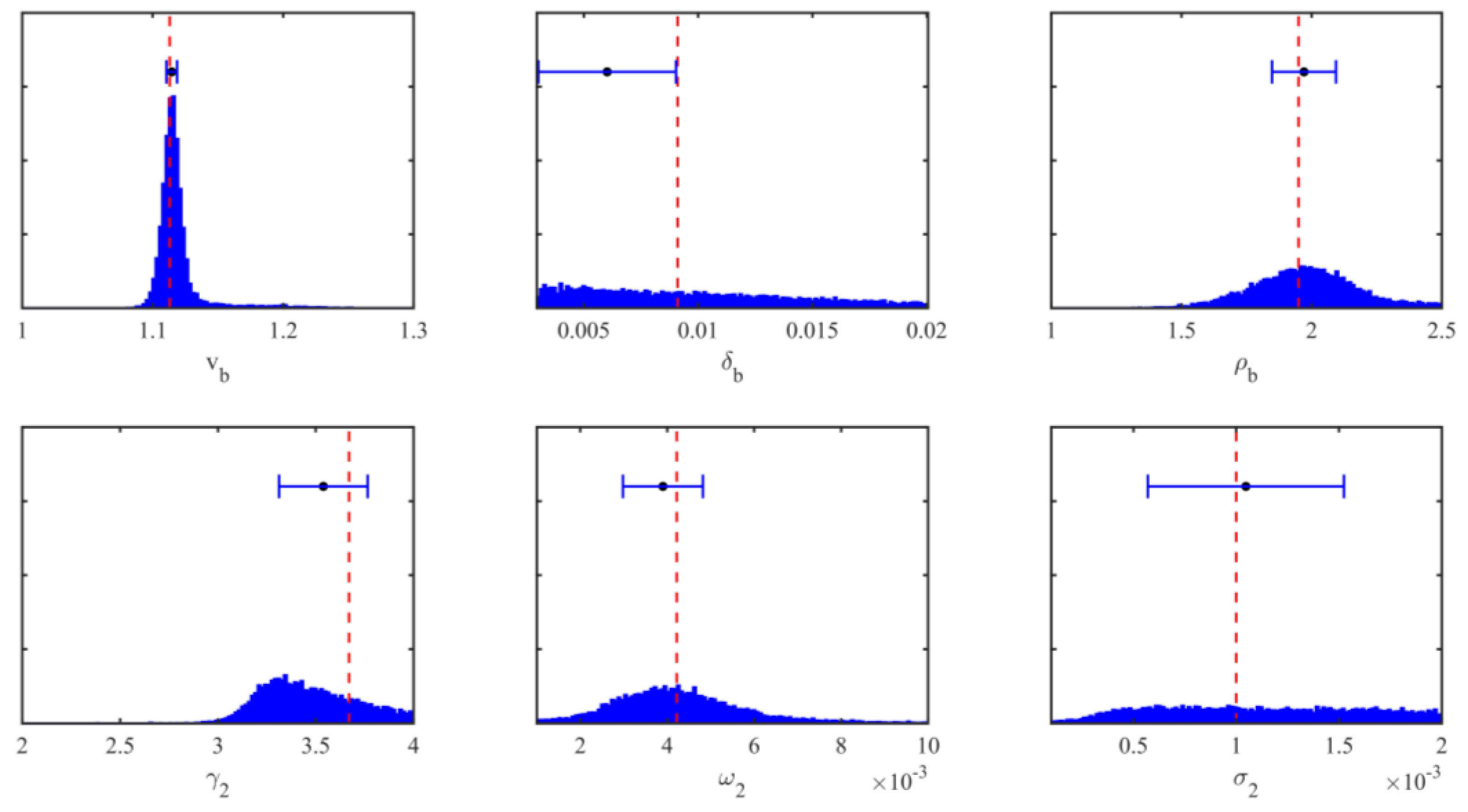
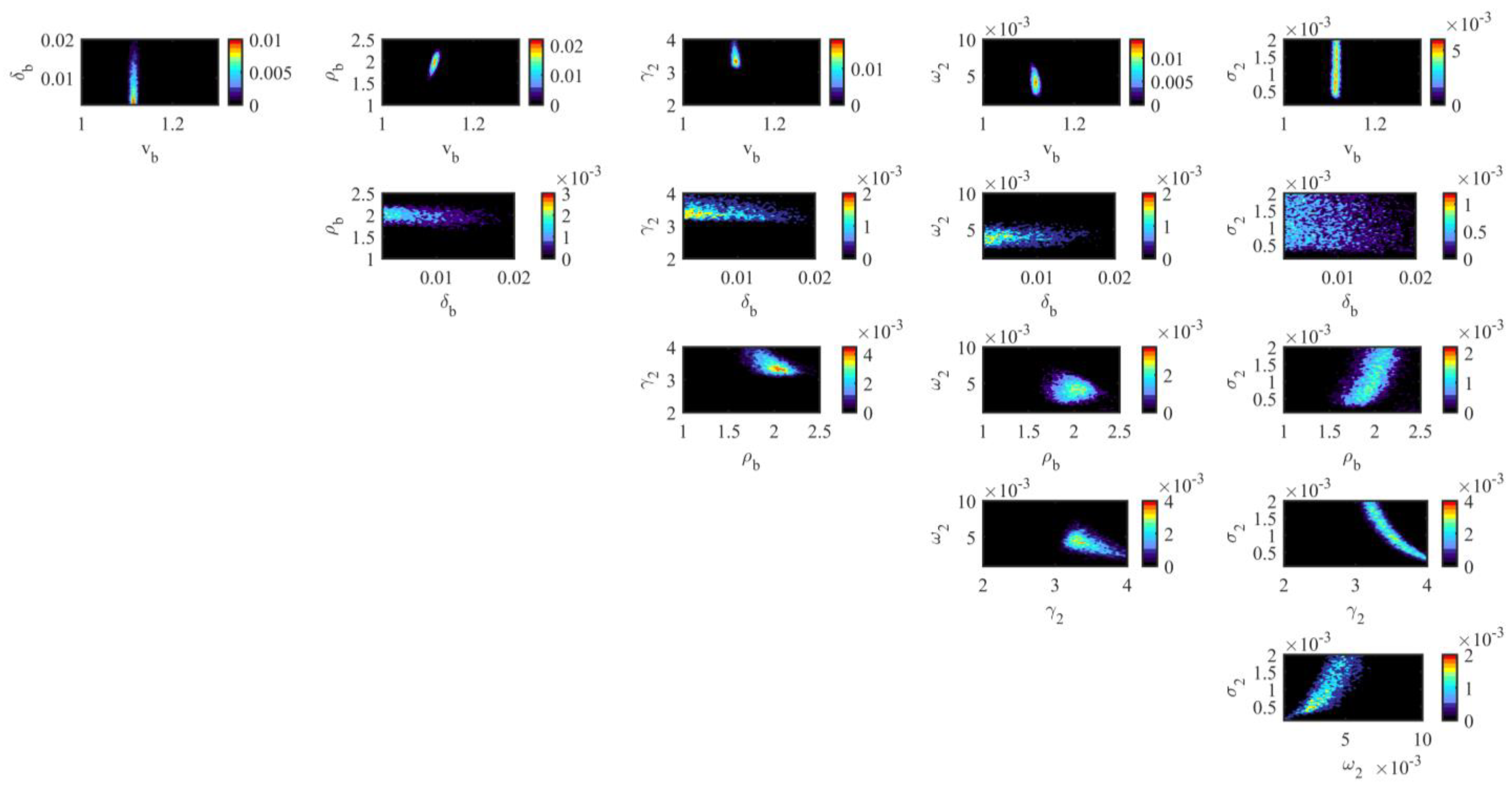
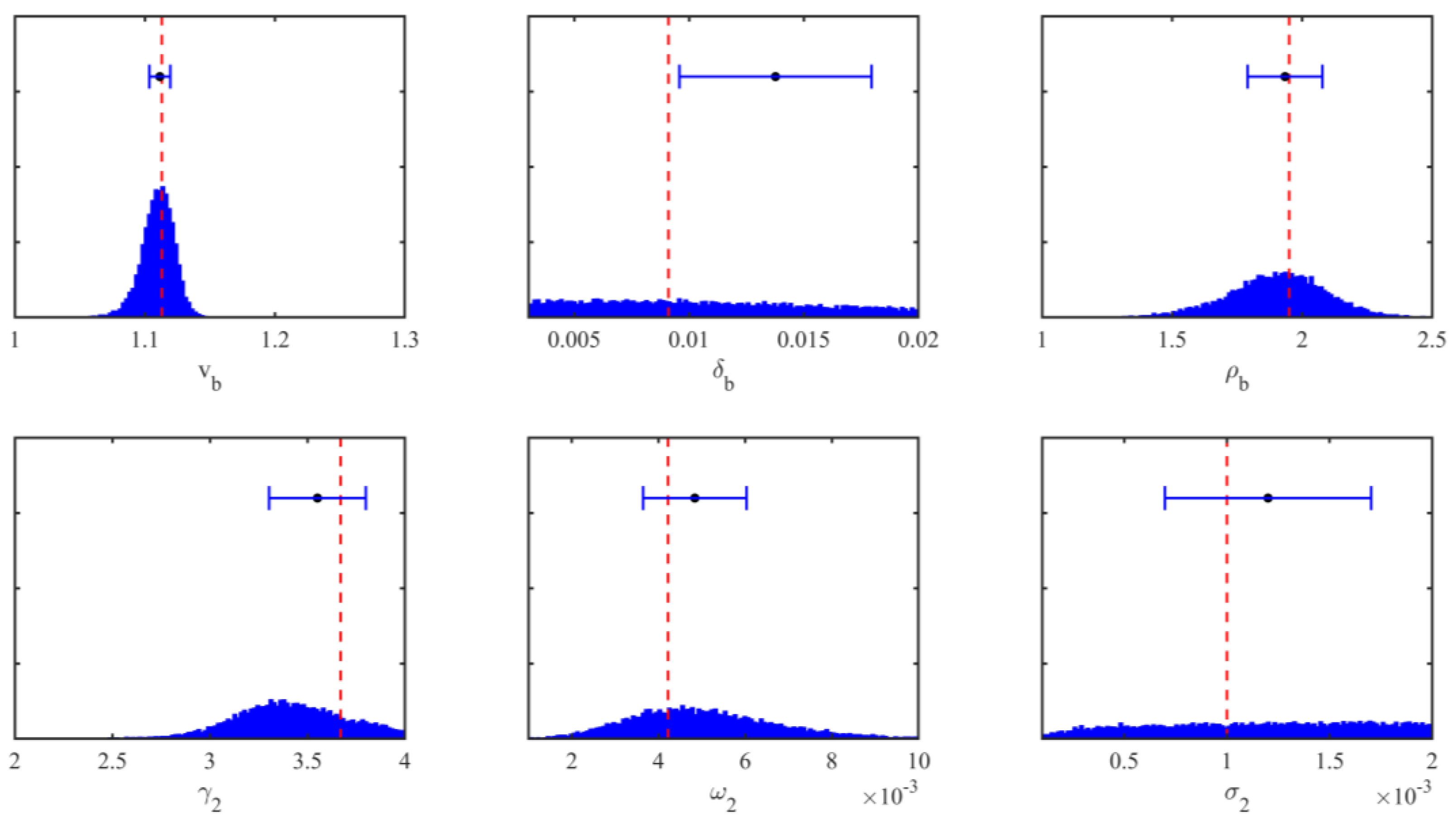
4.2. Analysis of Simulation Results
5. Validation with Historical Backscattering Data
5.1. Experiment Data Description
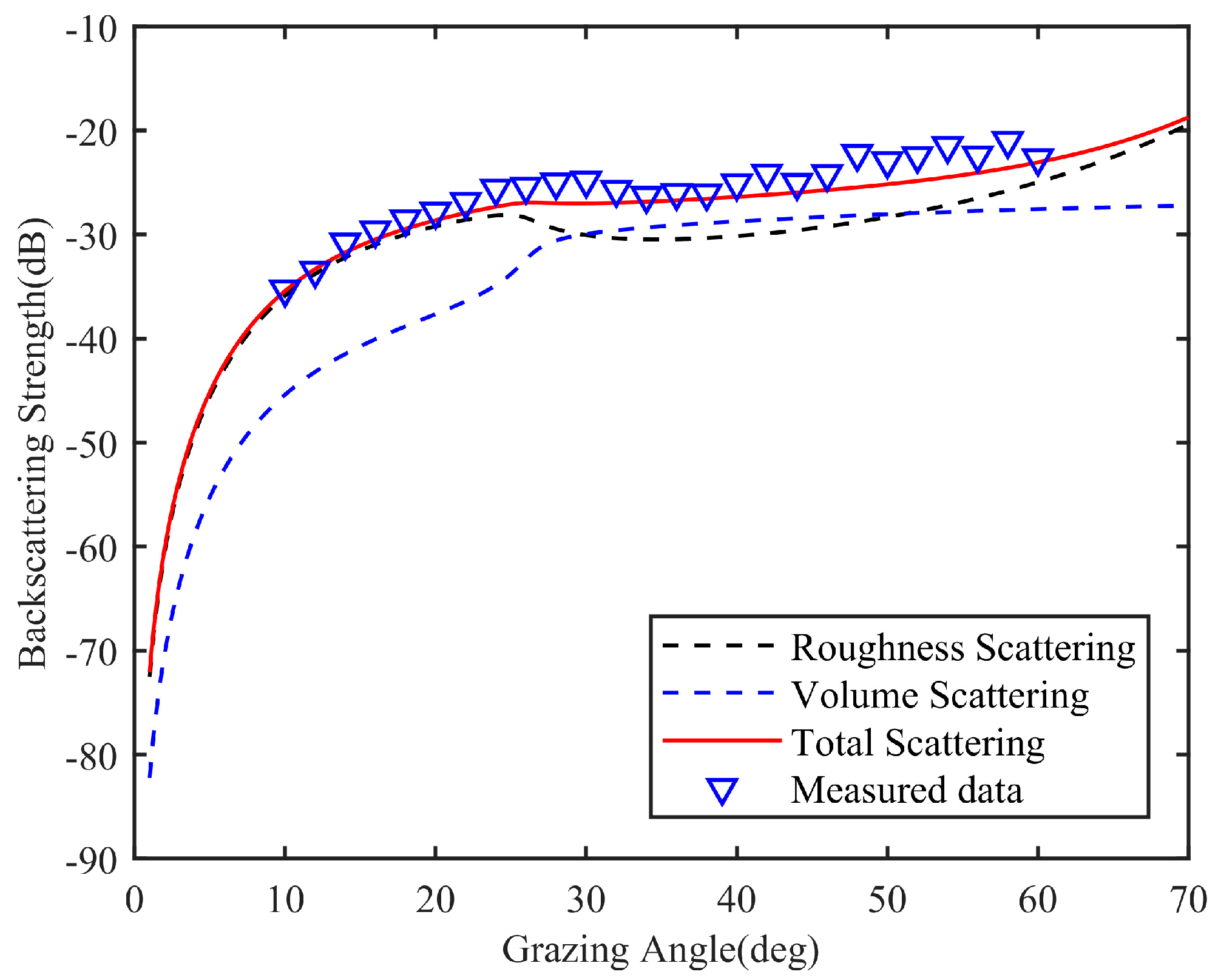
5.2. Analysis of Experiment Results
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jackson, D.; Richardson, M. High-Frequency Seafloor Acoustics; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Colin, M.; Otnes, R.; van Walree, P.; Prior, M.; Dol, H.; Ainslie, M. From sonar performance modelling to underwater communication performance modelling. In Proceedings of the 4th Underwater Acoustics Conference and Exhibition, Skiathos, Greece, 3–8 September 2017; pp. 221–228. [Google Scholar]
- Lynch, J.; Tang, D. Overview of Shallow Water 2006 JASA EL Special Issue Papers. J. Acoust. Soc. Am. 2008, 124, EL63–EL65. [Google Scholar] [CrossRef] [PubMed]
- Lee, K.M.; Ballard, M.S.; McNeese, A.R.; Muir, T.G.; Wilson, P.S.; Costley, R.D.; Hathaway, K.K. In situ measurements of sediment acoustic properties in Currituck Sound and comparison to models. J. Acoust. Soc. Am. 2016, 140, 3593–3606. [Google Scholar] [CrossRef] [PubMed]
- Jiang, Y.-M.; Holland, C.W.; Dosso, S.E.; Dettmer, J. Depth and frequency dependence of geoacoustic properties on the New England Mud Patch from reflection coefficient inversion. J. Acoust. Soc. Am. 2023, 154, 2383–2397. [Google Scholar] [CrossRef] [PubMed]
- Dosso, S.E.; Yeremy, M.L.; Ozard, J.M.; Chapman, N.R. Estimation of ocean-bottom properties by matched-field inversion of acoustic field data. IEEE J. Oceanic. Eng. 1993, 18, 232–239. [Google Scholar] [CrossRef]
- Liu, M.; Niu, H.; Li, Z.; Liu, Y.; Zhang, Q. Deep-learning geoacoustic inversion using multi-range vertical array data in shallow water. J. Acoust. Soc. Am. 2022, 151, 2101–2116. [Google Scholar] [CrossRef] [PubMed]
- Chapman, N.R.; Shang, E.C. Review of Geoacoustic Inversion in Underwater Acoustics. J. Theor. Comput. Acoust. 2021, 29, 66. [Google Scholar] [CrossRef]
- Uscinski, B.J. Matched Field Processing for Underwater Acoustics. By ALEXANDRA TOLSTOY. World Scientific, 1993. 212 pp. J. Fluid Mech. 1994, 259, 375. [Google Scholar] [CrossRef]
- Shi, J.; Sun, D.; Dosso, S.E.; Liu, Q. Geoacoustic inversion of the pressure gradient data using a single vector sensor. J. Acoust. Soc. Am. 2018, 144, 1974. [Google Scholar] [CrossRef]
- Jiang, Y.-M.; Holland, C.W.; Dosso, S.; Dettmer, J. Bayesian geoacoustic inversion of 1–2 kHz seabed reflection data for layered muddy sediments. J. Acoust. Soc. Am. 2022, 152, A145. [Google Scholar] [CrossRef]
- Xue, Y.; Zhu, H.; Wang, X.; Zheng, G.; Liu, X.; Wang, J. Bayesian geoacoustic parameters inversion for multi-layer seabed in shallow sea using underwater acoustic field. Front. Mar. Sci. 2023, 10, 1058542. [Google Scholar] [CrossRef]
- Jackson, D.R.; Baird, A.M.; Crisp, J.J.; Thomson, P.A.G. High-frequency bottom backscatter measurements in shallow water. J. Acoust. Soc. Am. 1986, 80, 1188–1199. [Google Scholar] [CrossRef]
- Williams, K.L.; Jackson, D.R.; Thorsos, E.I.; Dajun, T.; Briggs, K.B. Acoustic backscattering experiments in a well characterized sand sediment: Data/model comparisons using sediment fluid and Biot models. IEEE J. Oceanic. Eng. 2002, 27, 376–387. [Google Scholar] [CrossRef]
- Radhakrishnan, S.; Anu, A.P. Characterization of seafloor roughness from high-frequency acoustic backscattering measurements in shallow water off the west coast of India. J. Acoust. Soc. Am. 2020, 148, 2987–2996. [Google Scholar] [CrossRef] [PubMed]
- Turgut, A. Inversion of bottom/subbottom statistical parameters from acoustic backscatter data. J. Acoust. Soc. Am. 1997, 102, 833–852. [Google Scholar] [CrossRef]
- Zou, B.; Zhai, J.; Qi, Z.; Li, Z. A Comparison of Three Sediment Acoustic Models Using Bayesian Inversion and Model Selection Techniques. Remote Sens. 2019, 11, 562. [Google Scholar] [CrossRef]
- Yu, S.; Liu, B.; Yu, K.; Yang, Z.; Kan, G.; Zong, L. Inversion of bottom parameters using a backscattering model based on the effective density fluid approximation. Appl Acoust 2021, 182, 108187. [Google Scholar] [CrossRef]
- Dosso, S.E.; Nielsen, P.L.; Harrison, C.H. Bayesian inversion of reverberation and propagation data for geoacoustic and scattering parameters. J. Acoust. Soc. Am. 2009, 125, 2867–2880. [Google Scholar] [CrossRef]
- Gerstoft, P.; Mecklenbräuker, C.F. Ocean acoustic inversion with estimation of a posteriori probability distributions. J. Acoust. Soc. Am. 1998, 104, 808–819. [Google Scholar] [CrossRef]
- Lapinski, A.L.S.; Dosso, S.E. Bayesian geoacoustic inversion for the Inversion Techniques 2001 Workshop. IEEE J. Oceanic. Eng. 2003, 28, 380–393. [Google Scholar] [CrossRef]
- Dosso, S.E. Quantifying uncertainty in geoacoustic inversion. I. A fast Gibbs sampler approach. J. Acoust. Soc. Am. 2002, 111, 129–142. [Google Scholar] [CrossRef]
- Dosso, S.E.; Nielsen, P.L. Quantifying uncertainty in geoacoustic inversion. II. Application to broadband, shallow-water data. J. Acoust. Soc. Am. 2002, 111, 143–159. [Google Scholar] [CrossRef] [PubMed]
- Malinverno, A. A Bayesian criterion for simplicity in inverse problem parametrization. Geophys. J. Int. 2000, 140, 267–285. [Google Scholar] [CrossRef]
- Ivakin, A.N. A unified approach to volume and roughness scattering. J. Acoust. Soc. Am. 1998, 103, 827–837. [Google Scholar] [CrossRef]
- Jackson, D.R.; Briggs, K.B.; Williams, K.L.; Richardson, M.D. Tests of models for high-frequency seafloor backscatter. IEEE J. Oceanic. Eng. 1996, 21, 458–470. [Google Scholar] [CrossRef]
- Williams, K.L.; Jackson, D.R. Bistatic bottom scattering: Model, experiments, and model/data comparison. J. Acoust. Soc. Am. 1998, 103, 169–181. [Google Scholar] [CrossRef]
- Yu, S.; Liu, B.; Yu, K.; Yang, Z.; Kan, G.; Zhang, X. Comparison of acoustic backscattering from a sand and a mud bottom in the South Yellow Sea of China. Ocean Eng. 2020, 202, 107145. [Google Scholar] [CrossRef]
- Jackson, D.R.; Winebrenner, D.P.; Ishimaru, A. Application of the composite roughness model to high-frequency bottom backscattering. J. Acoust. Soc. Am. 1986, 79, 1410–1422. [Google Scholar] [CrossRef]
- Olson, D.R. A series approximation to the Kirchhoff integral for Gaussian and exponential roughness covariance functions. J. Acoust. Soc. Am. 2021, 149, 4239–4247. [Google Scholar] [CrossRef]
- Battle, D.J.; Gerstoft, P.; Hodgkiss, W.S.; Kuperman, W.A.; Nielsen, P.L. Bayesian model selection applied to self-noise geoacoustic inversion. J. Acoust. Soc. Am. 2004, 116, 2043–2056. [Google Scholar] [CrossRef]
- Sanjana, M.; Latha, G.; Potty, G.R. Sensitivity analysis of model parameters in geoacoustic inversion. In 2013 Ocean Electronics (SYMPOL); IEEE: Piscataway, NJ, USA, 2013; pp. 96–100. [Google Scholar]
- Wan, L.; Badiey, M.; Knobles, D.P.; Wilson, P.S. The Airy phase of explosive sounds in shallow water. J. Acoust. Soc. Am. 2018, 143, EL199–EL205. [Google Scholar] [CrossRef]
- Briggs, K.B. High-Frequency Acoustic Scattering from Sediment Interface Roughness and Volume Inhomogeneities; Stennis Space Center, MS: Naval Research Laboratory: Coral Gables, FL, USA, 1994. [Google Scholar]
- Steininger, G.; Dettmer, J.; Dosso, S.E.; Holland, C.W. Trans-dimensional joint inversion of seabed scattering and reflection data. J. Acoust. Soc. Am. 2013, 133, 1347–1357. [Google Scholar] [CrossRef] [PubMed]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bottom Parameter | Symbol | Unit | True Value | Search Range | Mean ± Standard Deviation | MAP |
|---|---|---|---|---|---|---|
| Sediment/water sound speed ratio | dimensionless | 1.113 | 1–1.3 | 1.115 ± 0.004 | 1.116 | |
| Loss parameter of sediment | dimensionless | 0.0091 | 0.003–0.02 | 0.0060 ± 0.0030 | unclear | |
| Sediment/water density ratio | dimensionless | 1.95 | 1–2.5 | 1.95 ± 0.12 | 1.96 | |
| Spectral exponent of roughness spectrum | dimensionless | 3.67 | 2–4 | 3.54 ± 0.23 | - | |
| Spectral strength of roughness spectrum | cm4 | 0.00422 | 0.001–0.01 | 0.00391 ± 0.00092 | 0.00425 | |
| Volume scattering cross-section/attenuation coefficient ratio | dimensionless | 0.001 | 0.0001–0.002 | 0.0011 ± 0.0005 | unclear |
| Bottom Parameter | Symbol | Unit | True Value | Search Range | Mean ± Standard Deviation | MAP |
|---|---|---|---|---|---|---|
| Sediment/water sound speed ratio | dimensionless | 1.113 | 1–1.3 | 1.112 ± 0.008 | 1.114 | |
| Loss parameter of sediment | dimensionless | 0.0091 | 0.003–0.02 | 0.0138 ± 0.0042 | unclear | |
| Sediment/water density ratio | dimensionless | 1.95 | 1–2.5 | 1.94 ± 0.14 | 1.93 | |
| Spectral exponent of roughness spectrum | dimensionless | 3.67 | 2–4 | 3.42 ± 0.25 | - | |
| Spectral strength of roughness spectrum | cm4 | 0.00422 | 0.001–0.01 | 0.00481 ± 0.00123 | 0.00462 | |
| Volume scattering cross-section/attenuation coefficient ratio | dimensionless | 0.001 | 0.0001–0.002 | 0.0012 ± 0.0005 | unclear |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, Y.; Yu, S.; Qin, Z.; Liu, X.; Xie, C.; Liu, M.; Zhao, J. Bottom Multi-Parameter Bayesian Inversion Based on an Acoustic Backscattering Model. J. Mar. Sci. Eng. 2024, 12, 629. https://doi.org/10.3390/jmse12040629
Zheng Y, Yu S, Qin Z, Liu X, Xie C, Liu M, Zhao J. Bottom Multi-Parameter Bayesian Inversion Based on an Acoustic Backscattering Model. Journal of Marine Science and Engineering. 2024; 12(4):629. https://doi.org/10.3390/jmse12040629
Chicago/Turabian StyleZheng, Yi, Shengqi Yu, Zhiliang Qin, Xueqin Liu, Chuang Xie, Mengting Liu, and Jixiang Zhao. 2024. "Bottom Multi-Parameter Bayesian Inversion Based on an Acoustic Backscattering Model" Journal of Marine Science and Engineering 12, no. 4: 629. https://doi.org/10.3390/jmse12040629