
Asymptotic Ray Method for the Double Square Root Equation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. DSR Equation—Asymptotic Solution
2.2. DSR Equation—Rays and Hamiltonians
2.3. DSR Equation—Dynamic Ray Tracing
2.4. Initial Conditions for Ray Tracing and Dynamic Ray Tracing
2.4.1. Exploding Reflector Initial Conditions
2.4.2. Survey Sinking Initial Conditions
2.5. Asymptotic Ray Amplitudes and True-Amplitude Recovery
2.5.1. Asymptotic Ray Amplitudes
2.5.2. True-Amplitude Recovery
3. Results
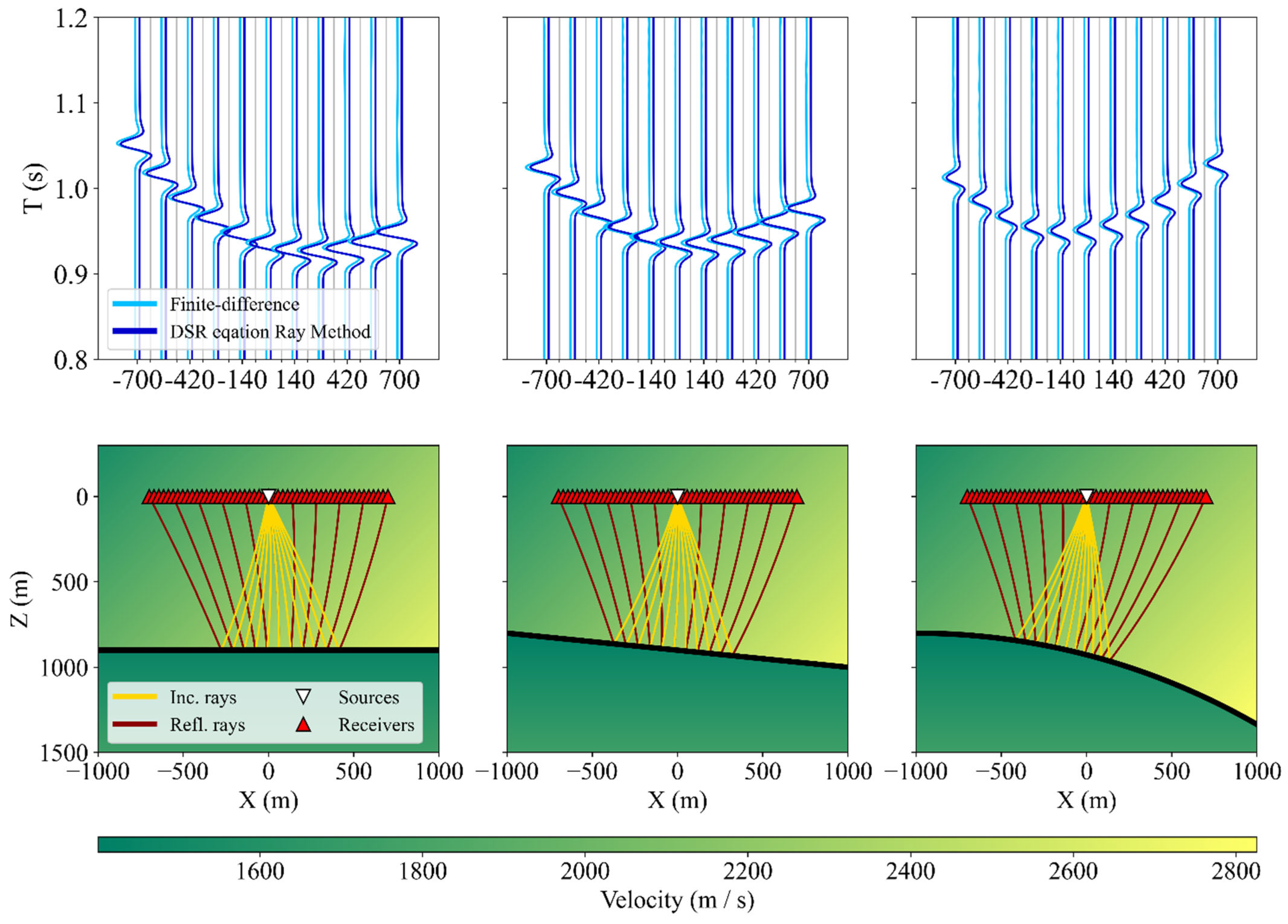
- Trace a family of DSR rays from the reflector to the surface using the Ray Tracing System (19) with initial conditions (31).
- Compute ray amplitudes using formula (43) and form synthetic seismograms using the technique presented in [18].
- Compare the DSR ray-synthetic seismograms with finite-difference wave equation gathers computed in the same model.
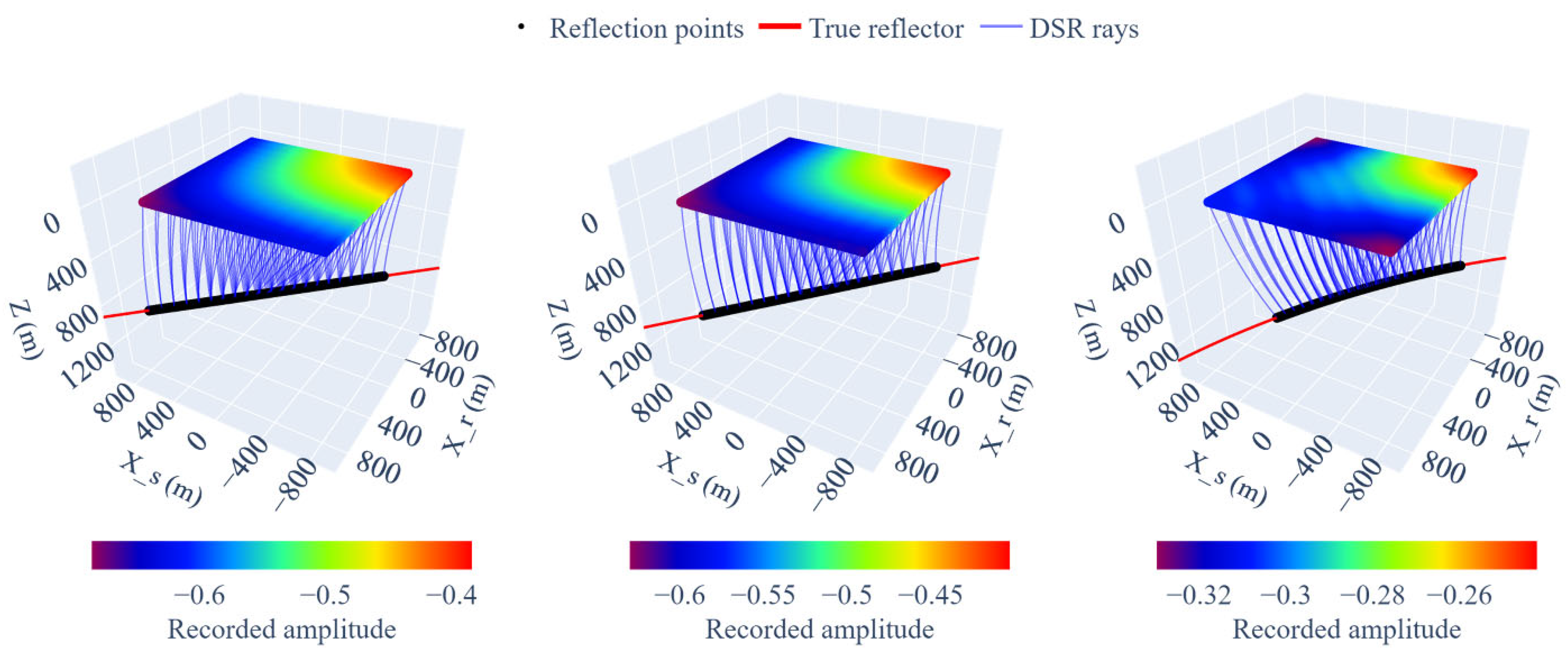
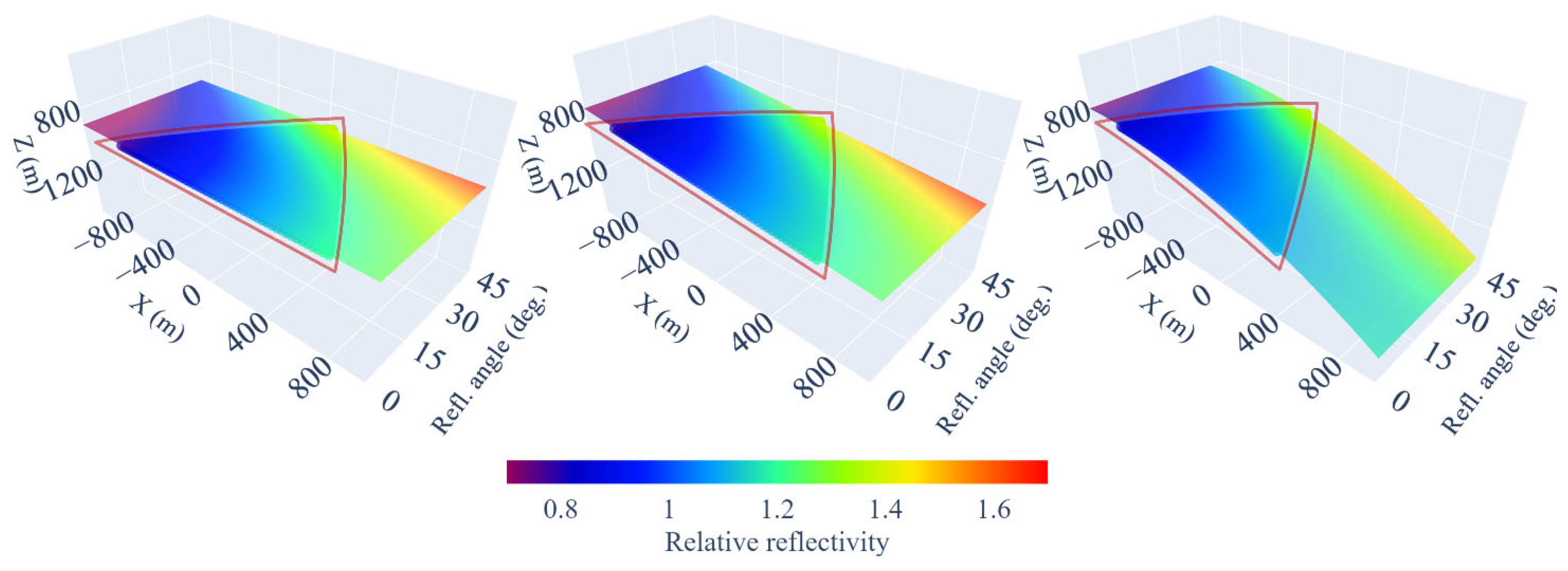
- Back-propagate the DSR rays from the survey plane down to the reflector using the Ray Tracing System (19) and initial conditions (35).
- Extract the reflectivities from the finite-difference data using formula (48) and compare them to the true ones.
4. Discussion and Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Jensen, F.B.; Kuperman, W.A.; Porter, M.B.; Schmidt, H. Computational Ocean Acoustics, 2nd ed.; Springer: New York, NY, USA, 2011; ISBN 978-1-4419-8677-1. [Google Scholar]
- Claerbout, J.F. Imaging the Earth’s Interior; Blackwell Scientific Publications: Oxford, UK, 1985. [Google Scholar]
- Makarov, D.V.; Petrov, P.S. Full Reconstruction of Acoustic Wavefields by Means of Pointwise Measurements. Wave Motion 2022, 115, 103084. [Google Scholar] [CrossRef]
- Bleistein, N.; Cohen, J.K.; Stockwell, J.W.J. Mathematics of Multidimensional Seismic Imaging, Migration, and Inversion; Springer: New York, NY, USA, 2001; Volume 13, ISBN 978-1-4612-6514-6. [Google Scholar]
- Biondi, B.L. 3D Seismic Imaging; Society of Exploration Geophysicists: Tulsa, OK, USA, 2006; ISBN 978-1-56080-137-5. [Google Scholar]
- Roux, P.; Kuperman, W.A.; Hodgkiss, W.; Chun, H.; Akal, T.; Stevenson, M. A Nonreciprocal Implementation of Time Reversal in the Ocean. J. Acoust. Soc. Am. 2004, 116, 1009–1015. [Google Scholar] [CrossRef]
- Belonosova, A.V.; Alekseev, A.S. On one formulation of the inverse kinematic seismic problem for a two-dimensional inhomogeneous medium. In Some Methods and Algorithms for Interpreting Geophysical Data; Nauka: Moscow, Russia, 1967; pp. 137–154. (In Russian) [Google Scholar]
- Stolk, C.C.; Symes, W.W. Kinematic Artifacts in Prestack Depth Migration. Geophysics 2004, 69, 562–575. [Google Scholar] [CrossRef]
- Alkhalifah, T.; Fomel, S.; Wu, Z. Source–Receiver Two-Way Wave Extrapolation for Prestack Exploding-Reflector Modelling and Migration. Geophys. Prospect. 2014, 63, 23–34. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, G.; Bleistein, N. True Amplitude Wave Equation Migration Arising from True Amplitude One-Way Wave Equations. Inverse Probl. 2003, 19, 1113–1138. [Google Scholar] [CrossRef]
- Zhang, Y.; Xu, S.; Zhang, G.; Bleistein, N. How to Obtain True Amplitude Common-angle Gathers from One-way Wave Equation Migration? In SEG Technical Program Expanded Abstracts; Society of Exploration Geophysicists: Houston, TX, USA, 2005; pp. 1021–1024. [Google Scholar]
- Zhang, Y.; Xu, S.; Bleistein, N.; Zhang, G. True-Amplitude, Angle-Domain, Common-Image Gathers from One-Way Wave-Equation Migrations. Geophysics 2007, 72, S49–S58. [Google Scholar] [CrossRef]
- Cao, J.; Wu, R.S. Lateral Velocity Variation Related Correction in Asymptotic True-Amplitude One-Way Propagators. In SEG Technical Program Expanded Abstracts; Society of Exploration Geophysicists: Houston, TX, USA, 2009; Volume 28, pp. 2687–2691. [Google Scholar] [CrossRef]
- You, J.; Wu, R.S.; Liu, X. One-Way True-Amplitude Migration Using Matrix Decomposition. Geophysics 2018, 83, S387–S398. [Google Scholar] [CrossRef]
- Wu, C.; Feng, B.; Wang, H.; Wang, T. Three-Dimensional Angle-Domain Double-Square-Root Migration in VTI Media for the Large-Scale Wide-Azimuth Seismic Data. Acta Geophys. 2020, 68, 1021–1037. [Google Scholar] [CrossRef]
- Khoury, A.; Symes, W.; Williamson, P.; Shen, P. DSR Migration Velocity Analysis by Differential Semblance Optimization. In SEG Technical Program Expanded Abstracts; Society of Exploration Geophysicists: Houston, TX, USA, 2006; pp. 2450–2454. [Google Scholar]
- Popov, M.M. Ray Theory and Gaussian Beam Method for Geophysicists; EDUFBA: Salvador, Brazil, 2002; ISBN 8523202560. [Google Scholar]
- Červený, V. Seismic Ray Theory; Cambridge University Press: Cambridge, UK, 2001; ISBN 9780521366717. [Google Scholar]
- Duchkov, A.A.; De Hoop, M.V. Extended Isochron Rays in Prestack Depth (Map) Migration. Geophysics 2010, 75, S139–S150. [Google Scholar] [CrossRef]
- Wolfram Research Inc. Mathematica, Version 13.2.0; Wolfram Research: Champaign, IL, USA, 2023.
- Fomel, S.; Sava, P.; Vlad, I.; Liu, Y.; Bashkardin, V. Madagascar: Open-Source Software Project for Multidimensional Data Analysis and Reproducible Computational Experiments. J. Open Res. Softw. 2013, 1, e8. [Google Scholar] [CrossRef]
- Harris, C.R.; Millman, K.J.; van der Walt, S.J.; Gommers, R.; Virtanen, P.; Cournapeau, D.; Wieser, E.; Taylor, J.; Berg, S.; Smith, N.J.; et al. Array Programming with NumPy. Nature 2020, 585, 357–362. [Google Scholar] [CrossRef]
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. SciPy 1.0: Fundamental Algorithms for Scientific Computing in Python. Nat. Methods 2020, 17, 261–272. [Google Scholar] [CrossRef]
- Hunter, J.D. Matplotlib: A 2D Graphics Environment. Comput. Sci. Eng. 2007, 9, 90–95. [Google Scholar] [CrossRef]
- Plotly Technologies Inc. Collaborative Data Science; Plotly Technologies Inc.: Montreal, QC, Canada, 2015. [Google Scholar]
- Lambaré, G. Stereotomography. Geophysics 2008, 73, VE25–VE34. [Google Scholar] [CrossRef]
- Stolk, C.C.; de Hoop, M.V.; Symes, W.W. Kinematics of Shot-Geophone Migration. Geophysics 2009, 74, WCA19–WCA34. [Google Scholar] [CrossRef]
- Schleicher, J.; Costa, J.C.; Santos, L.T.; Novais, A.; Tygel, M. On the Estimation of Local Slopes. In SEG Technical Program Expanded Abstracts; Society of Exploration Geophysicists: Houston, TX, USA, 2008; pp. 2998–3002. [Google Scholar]
- Kai, X.; Yang, K.; Wang, Y.-X. Extracting a High-Quality Data Space for Stereo-Tomography Based on a 3D Structure Tensor Algorithm and Kinematic de-Migration. J. Geophys. Eng. 2017, 14, 792–801. [Google Scholar] [CrossRef]
- Billette, F.; Le Bégat, S.; Podvin, P.; Lambaré, G. Practical Aspects and Applications of 2D Stereotomography. Geophysics 2003, 68, 1008–1021. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shilov, N.N.; Duchkov, A.A. Asymptotic Ray Method for the Double Square Root Equation. J. Mar. Sci. Eng. 2024, 12, 636. https://doi.org/10.3390/jmse12040636
Shilov NN, Duchkov AA. Asymptotic Ray Method for the Double Square Root Equation. Journal of Marine Science and Engineering. 2024; 12(4):636. https://doi.org/10.3390/jmse12040636
Chicago/Turabian StyleShilov, Nikolay N., and Anton A. Duchkov. 2024. "Asymptotic Ray Method for the Double Square Root Equation" Journal of Marine Science and Engineering 12, no. 4: 636. https://doi.org/10.3390/jmse12040636