
Sliding Mode Control with Feedforward Compensation for a Soft Manipulator That Considers Environment Contact Constraints

Abstract
:1. Introduction
2. Static Feedforward Model
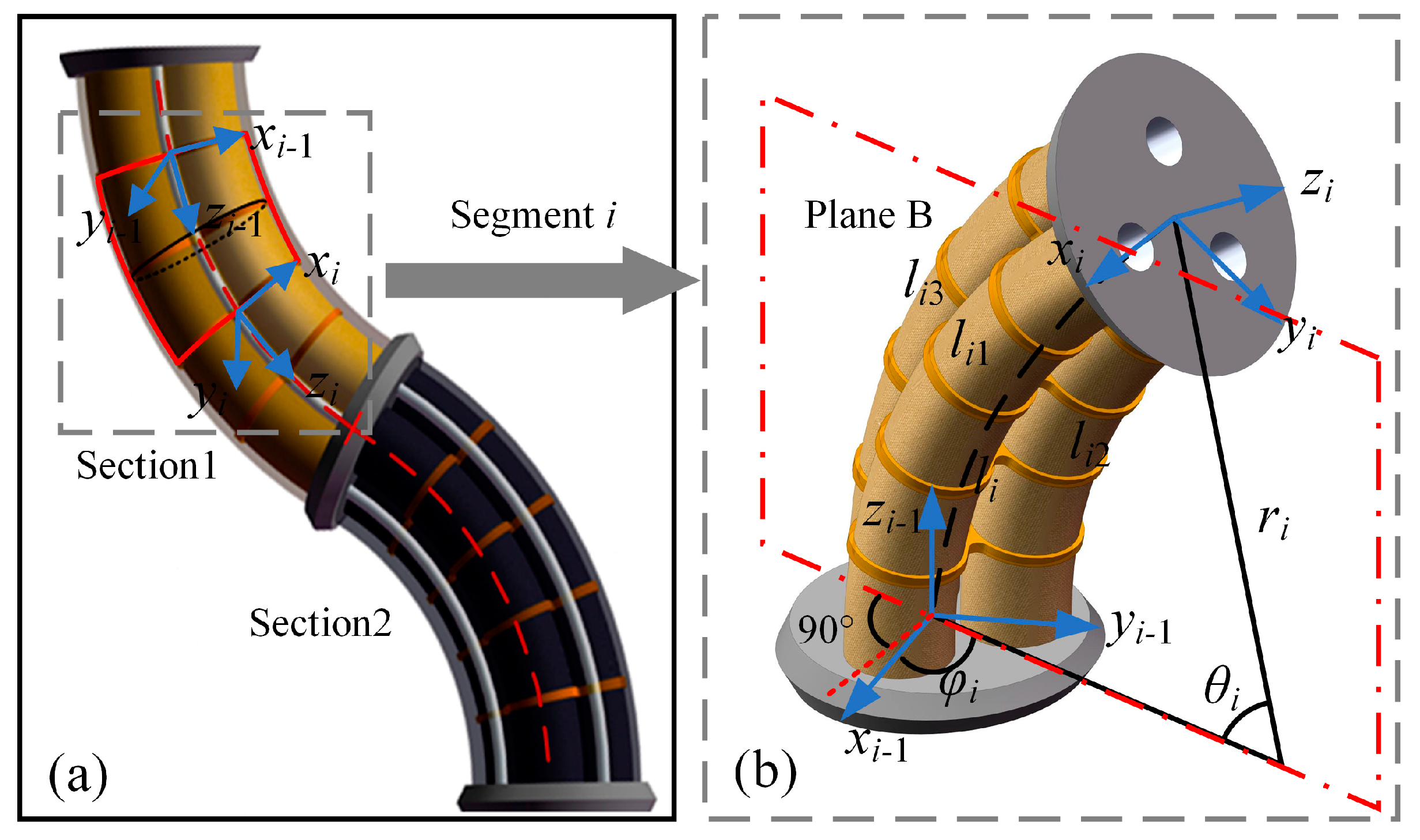
2.1. Static Feedforward Model
2.1.1. The Mapping fgx from Joint Space to Operational Space and Its Inverse Mapping fxg
2.1.2. The Mapping fgp from Joint Space to Actuator Space
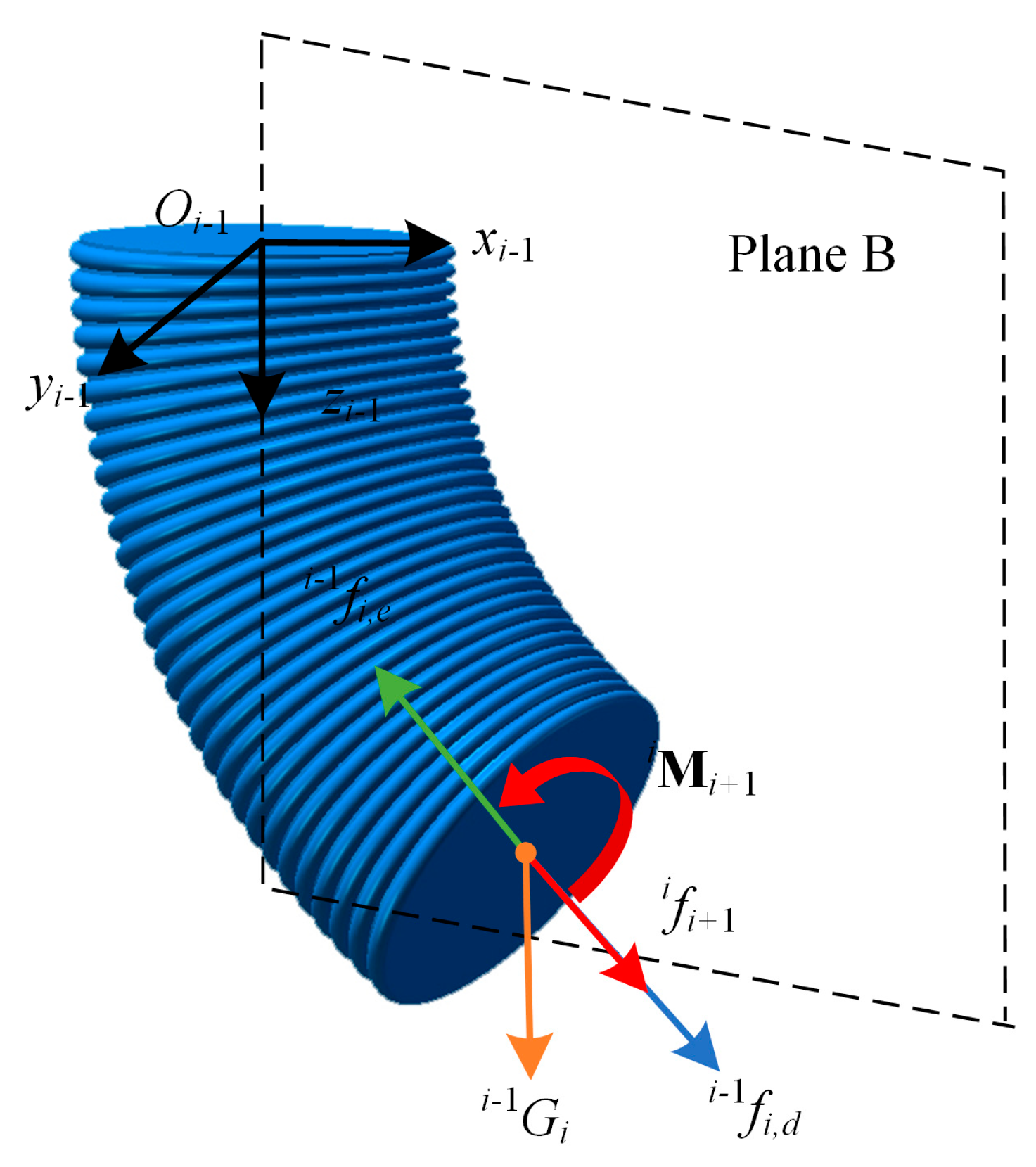
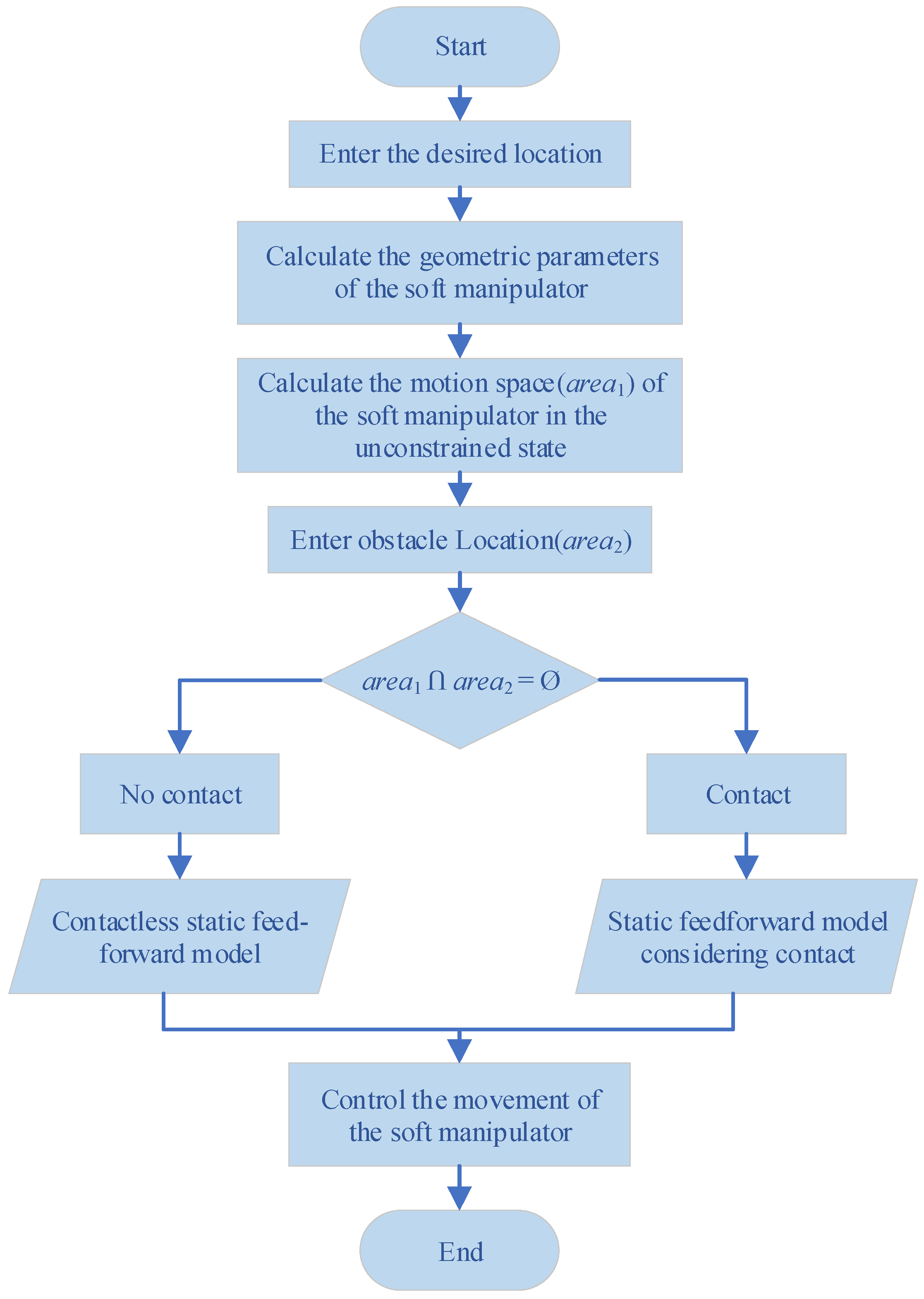
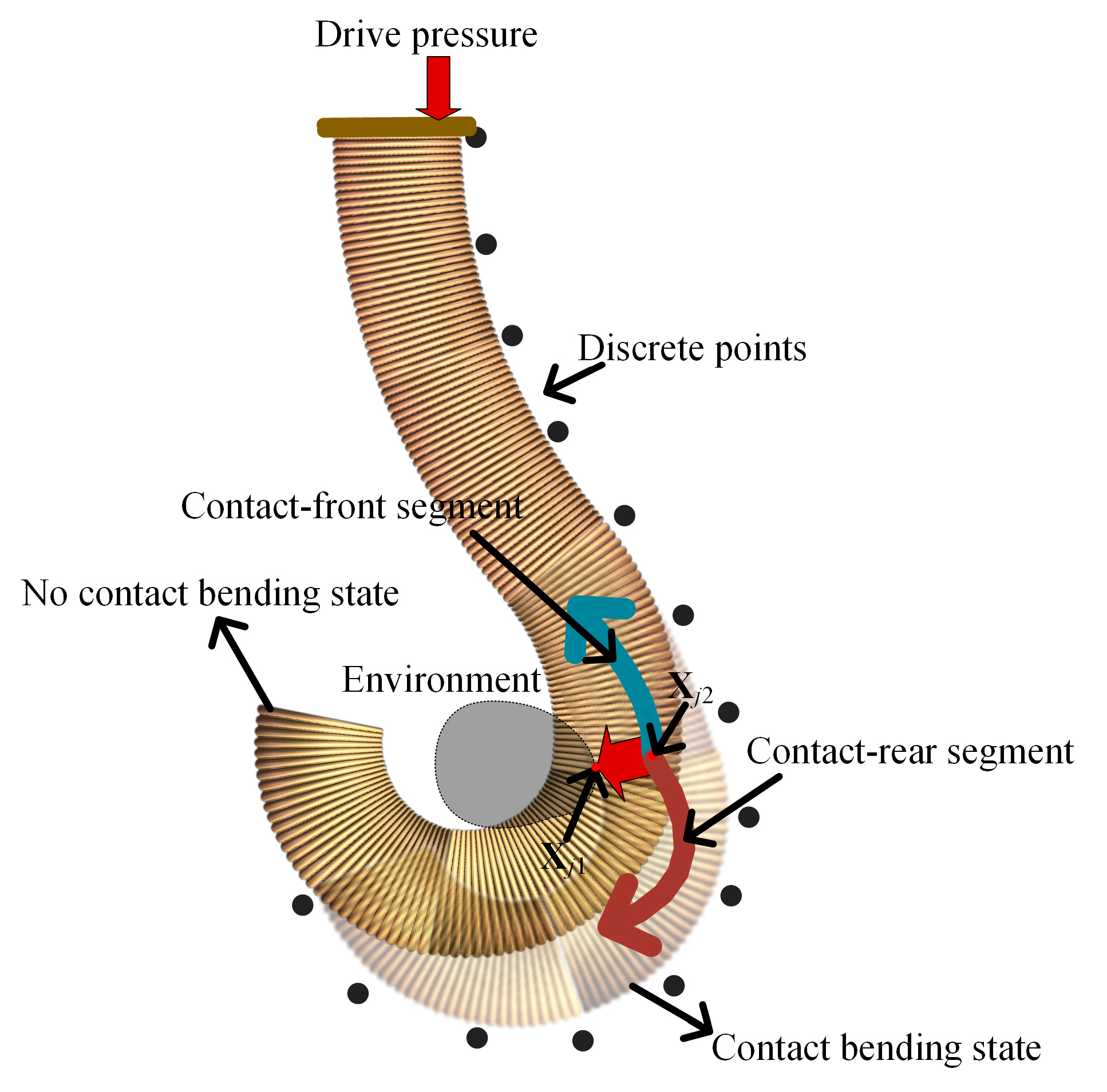
2.2. Static Feedforward Model with Contact Constraints
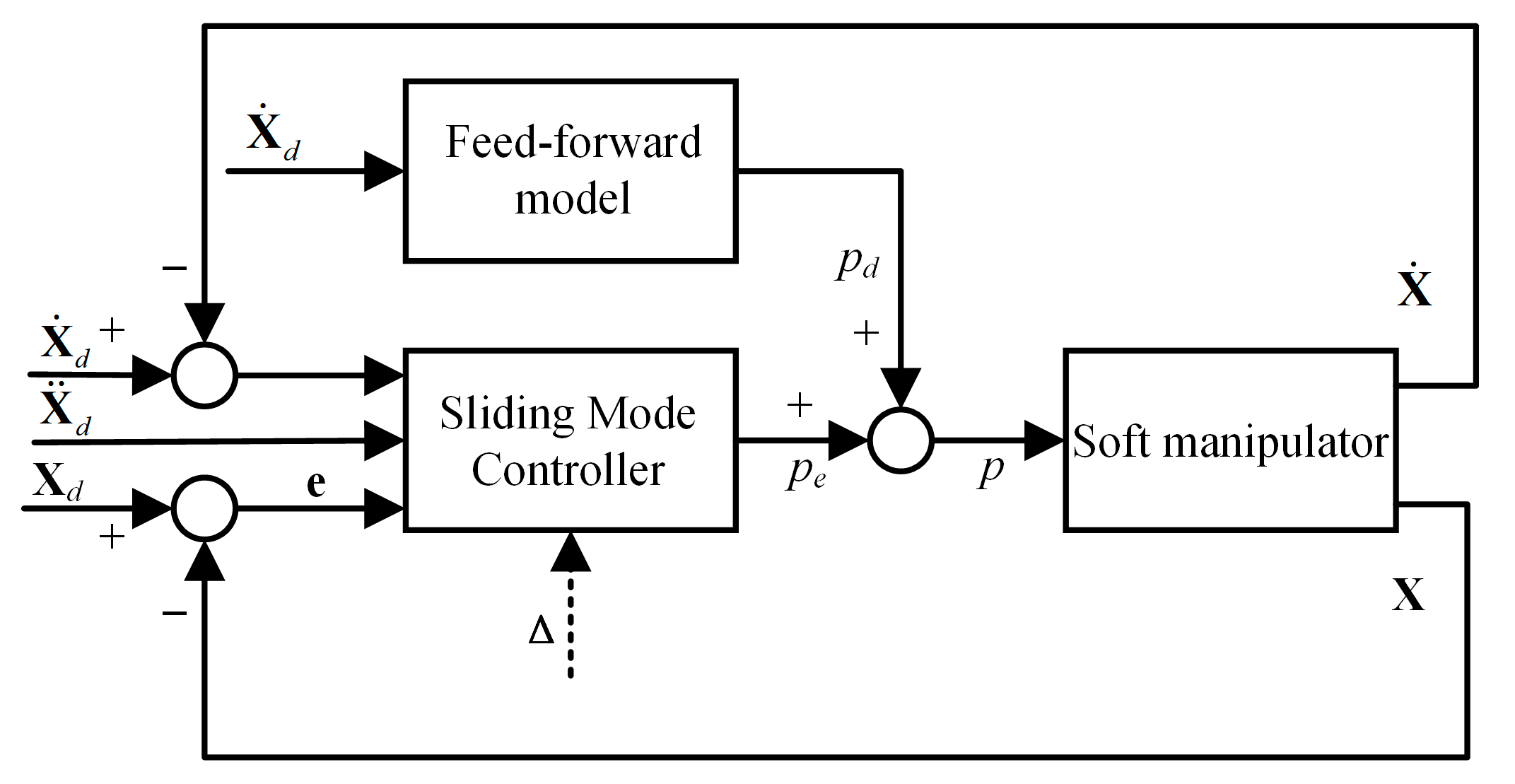
3. Design Controller
3.1. Operational Space Dynamics
3.2. Design Sliding Mode Controller
4. Simulation and Experiment
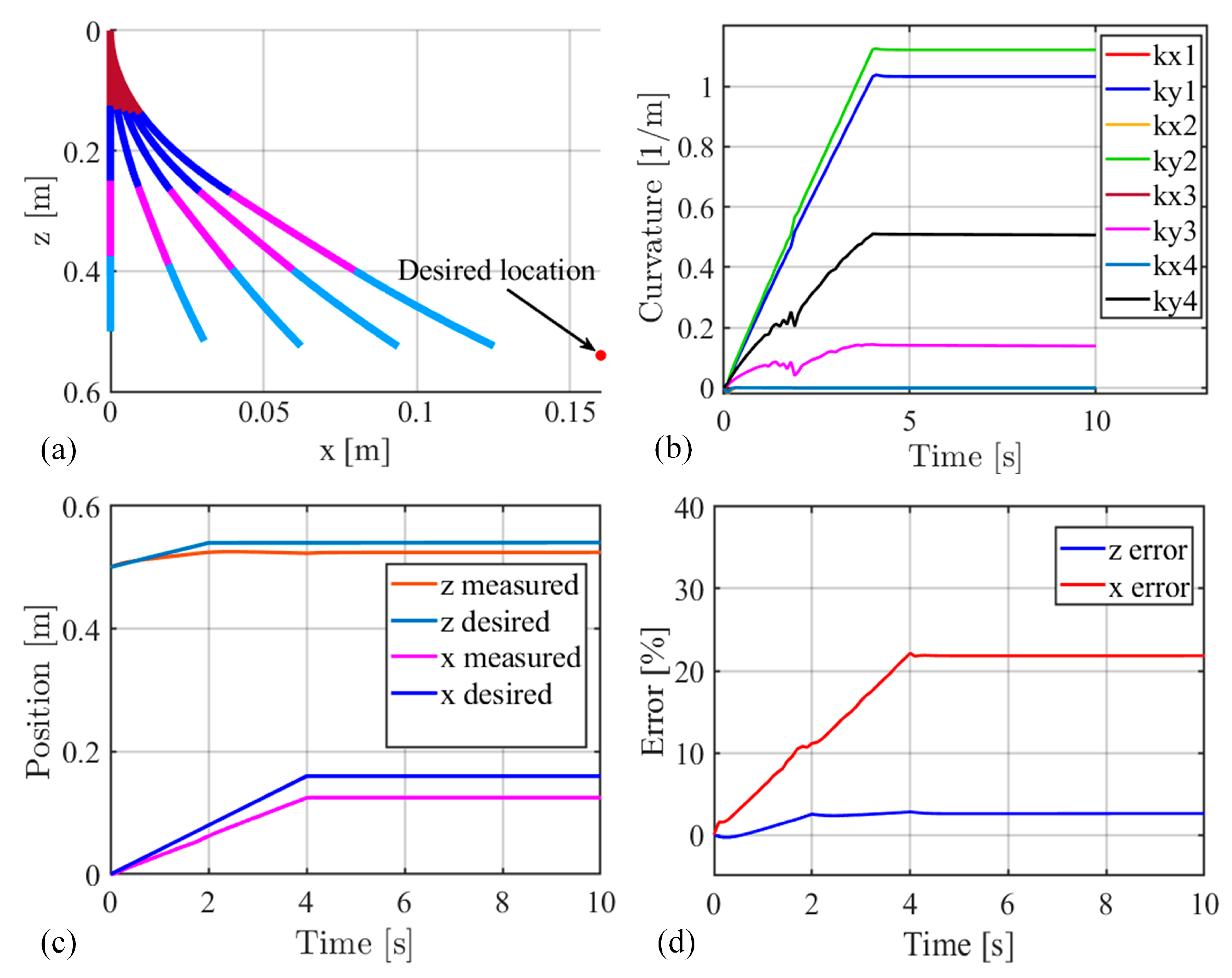
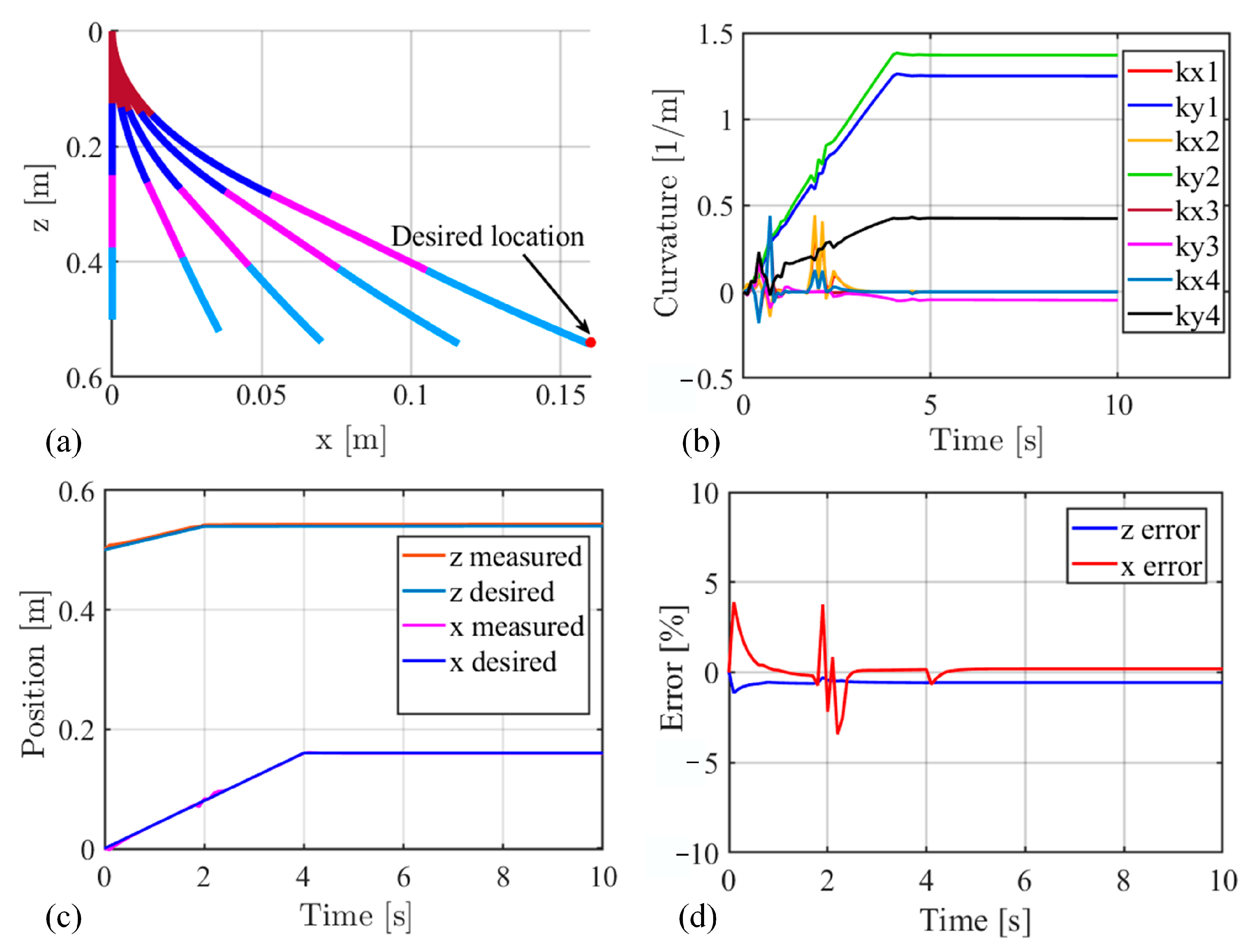
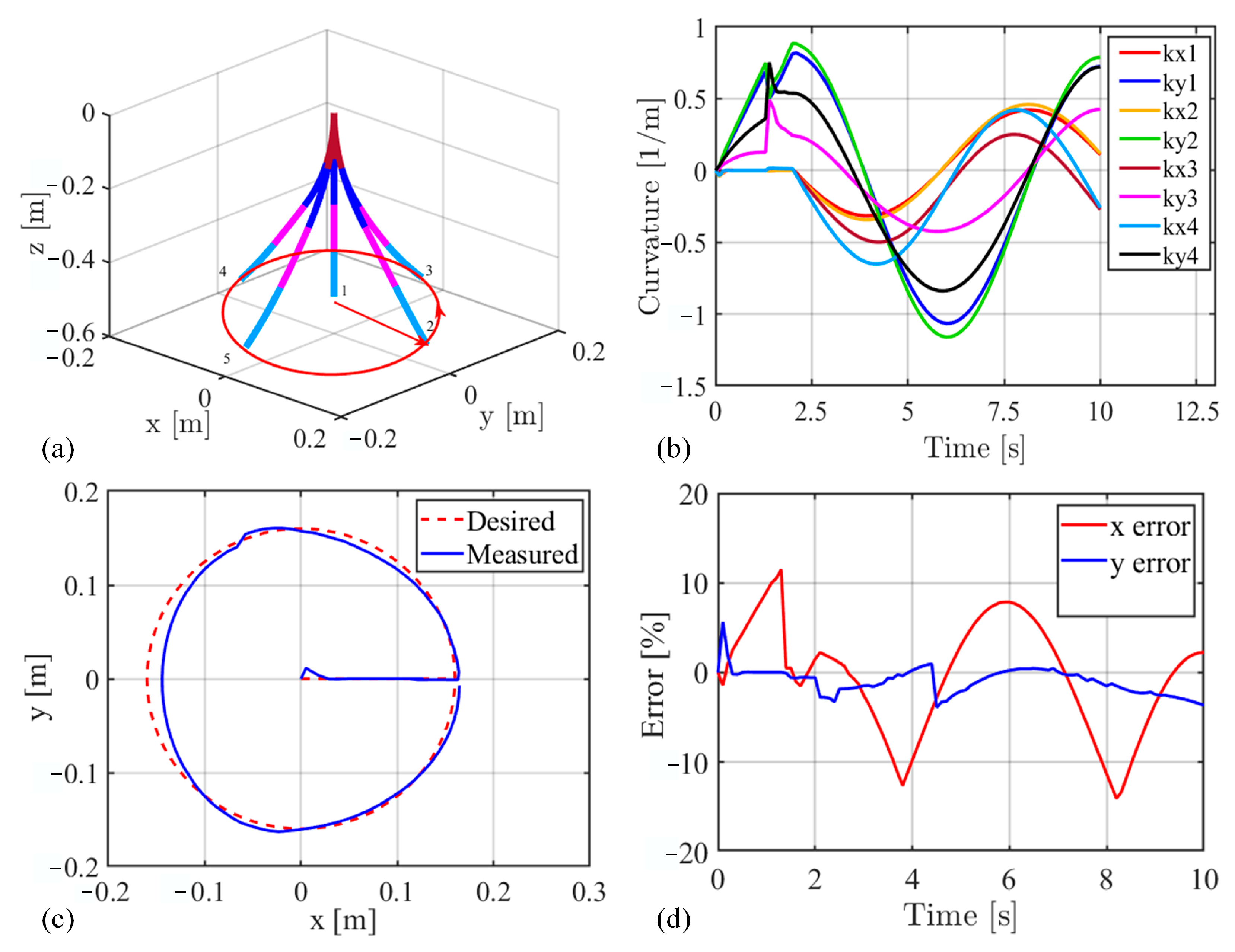
4.1. Simulation Result
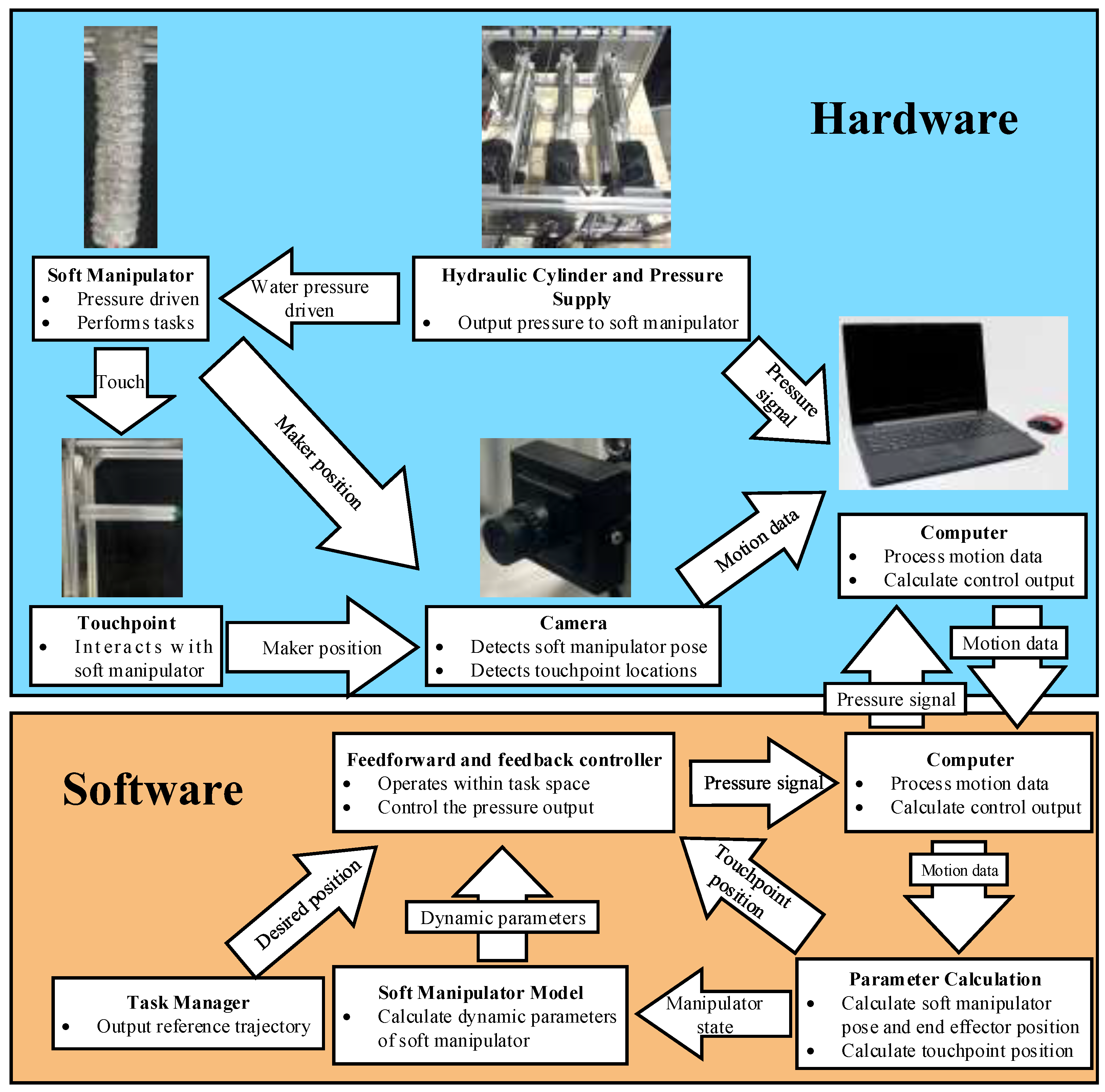
4.2. Experimental Result
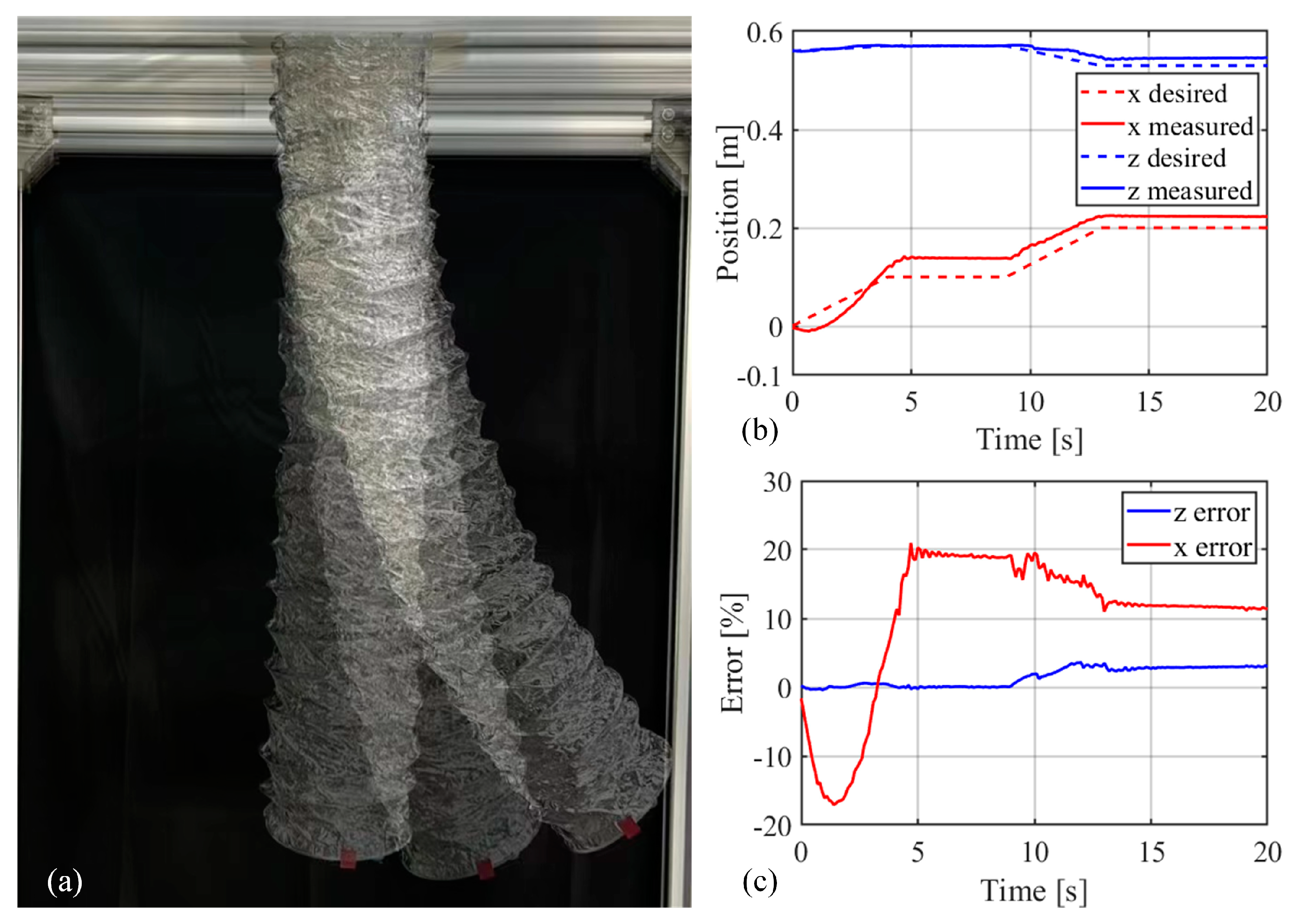
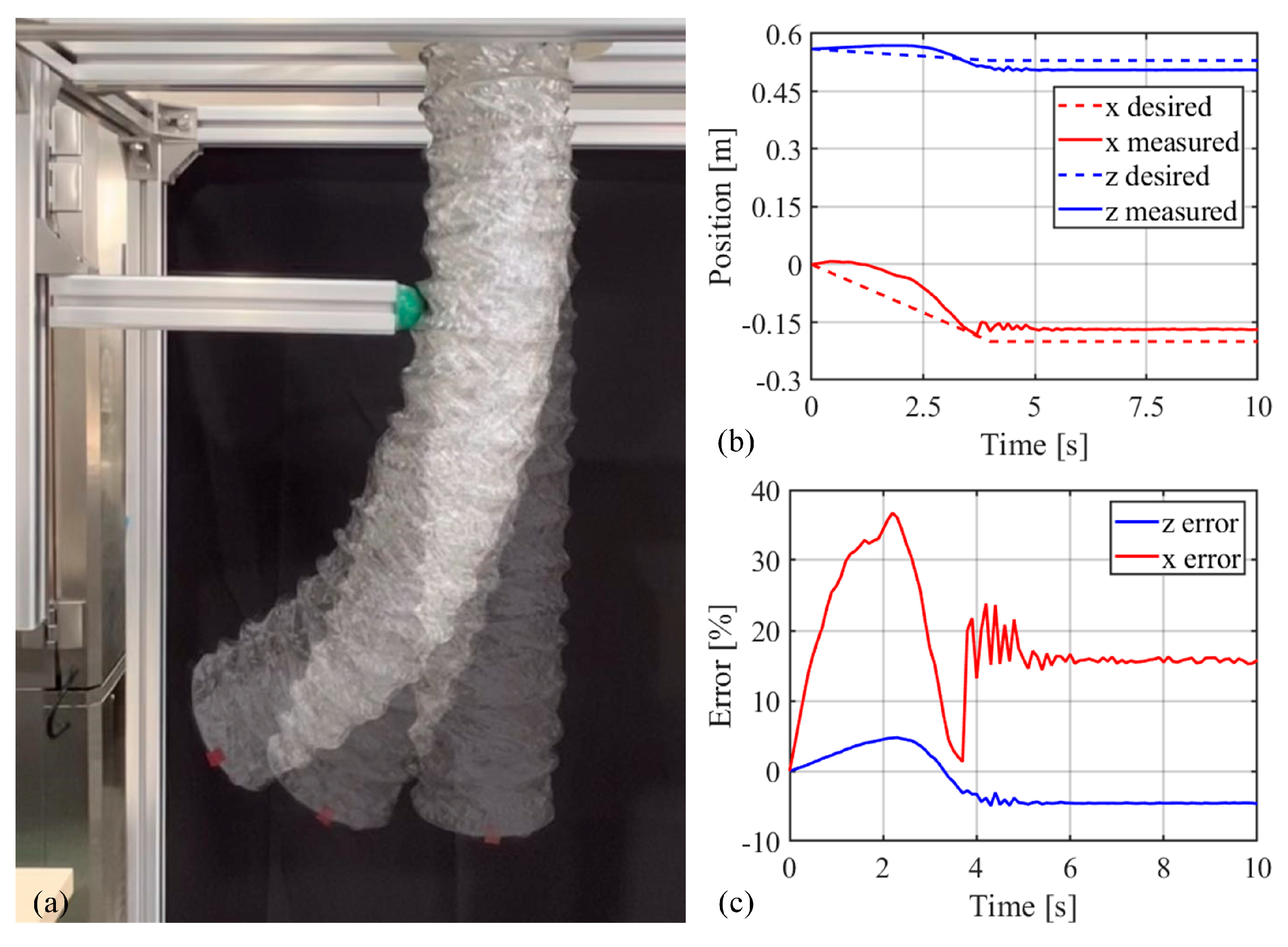
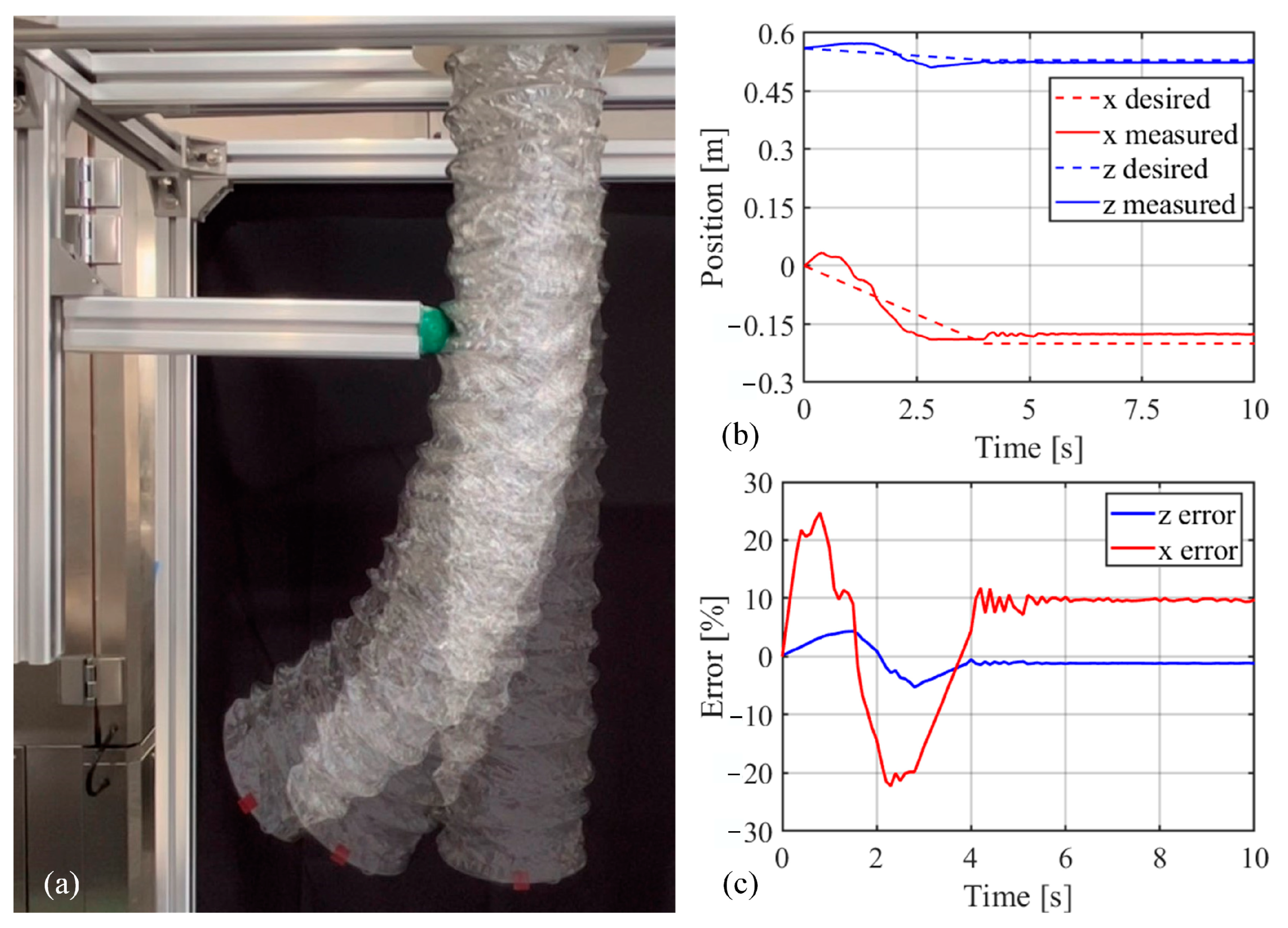
4.2.1. Trajectory-Tracking Experiment
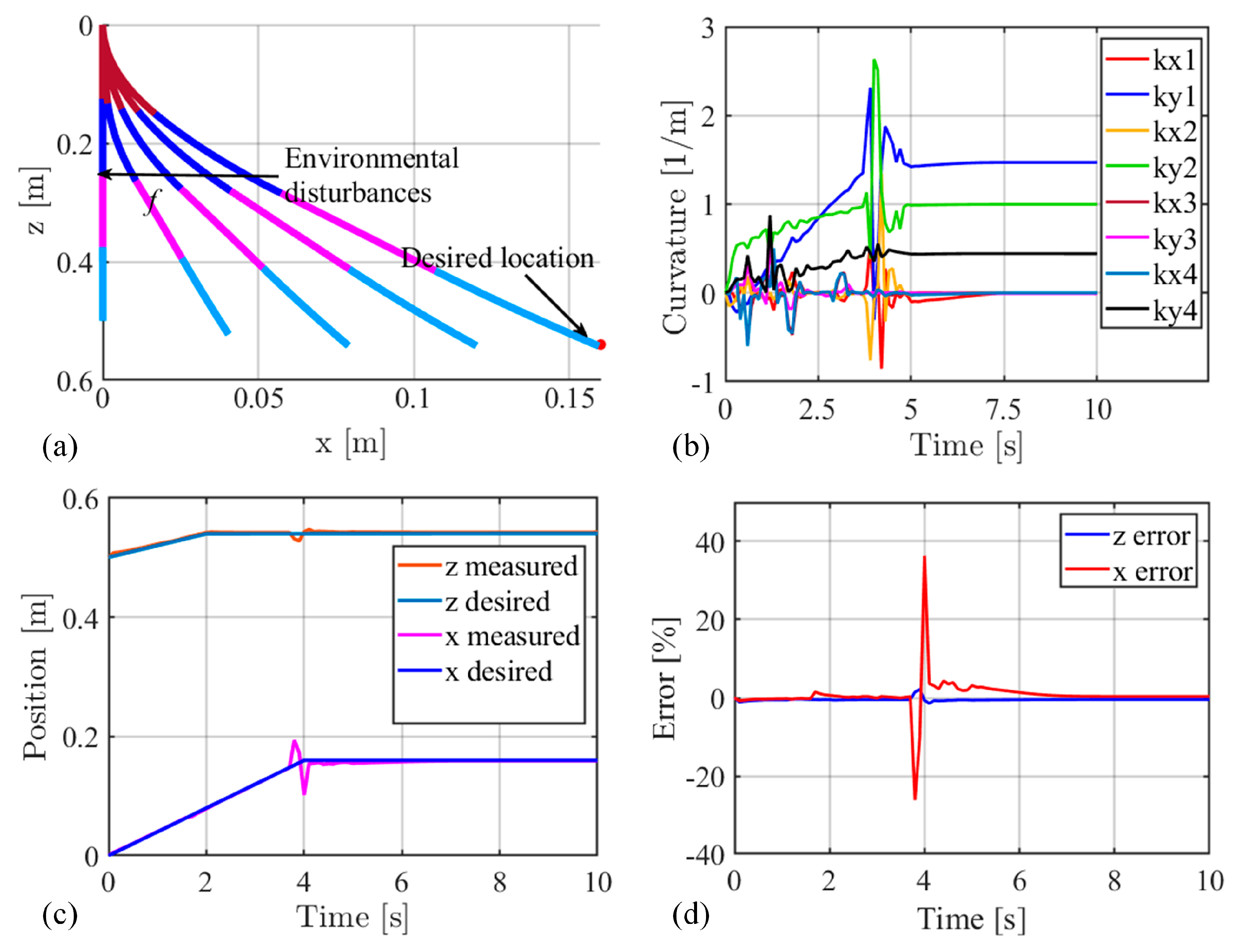
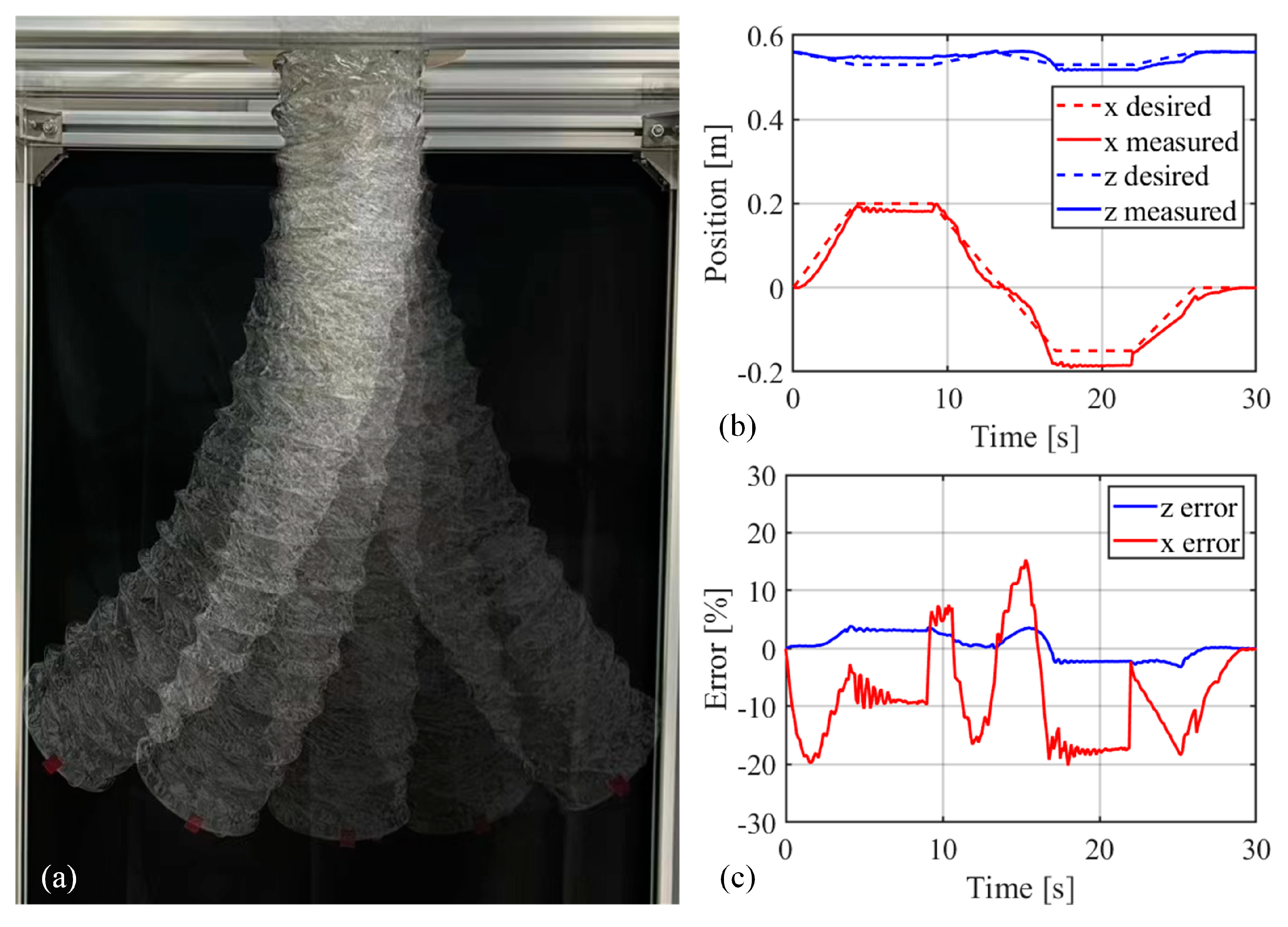
4.2.2. Collision Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, T.M.; Hao, Y.; Yang, X.; Wen, L. Soft Robotics: Structure, Actuation, Sensing and Control. J. Mech. Eng. 2017, 53, 1–13. [Google Scholar]
- Hou, T.G.; Wang, T.M.; Su, H.; Chang, S.; Chen, L.; Hao, Y.; Wen, L. Review on soft-bodied robots. Sci. Technol. Rev. 2017, 35, 20–28. [Google Scholar]
- Yan, J.H.; Shi, P.P.; Zhang, X.B.; Zhao, J. Review of Biomimetic Mechanism, Actuation, Modeling and Control in Soft Manipulators. J. Mech. Eng. 2018, 54, 1. [Google Scholar] [CrossRef]
- Umedachi, T.; Vikas, V.; Trimmer, B.A. Softworms: The design and control of non-pneumatic, 3D-printed, deformable robots. Bioinspir. Biomim. 2016, 11, 025001. [Google Scholar] [CrossRef]
- Marchese, A.D.; Onal, C.D.; Rus, D. Autonomous Soft Robotic Fish Capable of Escape Maneuvers Using Fluidic Elastomer Actuators. Soft Robot. 2014, 1, 75–87. [Google Scholar] [CrossRef] [Green Version]
- Rus, D.; Tolley, M. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [Green Version]
- Ricotti, L.; Trimmer, B.; Feinberg, A.W.; Raman, R.; Parker, K.K.; Bashir, R.; Sitti, M.; Martel, S.; Dario, P.; Menciassi, A. Biohybrid actuators for robotics: A review of devices actuated by living cells. Sci. Robot. 2017, 2, eaaq0495. [Google Scholar] [CrossRef]
- Deimel, R.; Brock, O. A novel type of compliant and underactuated robotic hand for dexterous grasping. Int. J. Robot. Res. 2016, 35, 161–185. [Google Scholar] [CrossRef] [Green Version]
- Fei, Y.; Wang, J.; Pang, W.; Uppalapati, N.K.; Krishnan, G.; Nguyen, P.H.; Sparks, C.; Nuthi, S.G.; Vale, N.M.; Polygerinos, P.; et al. A novel fabric-based versatile and stiffness-tunable soft gripper integrating soft pneumatic fingers and wrist. Soft Robot. 2019, 6, 1–20. [Google Scholar] [CrossRef]
- Hannan, M.W.; Walker, I.D. Kinematics and the implementation of an elephant’s trunk manipulator and other continuum style robots. J. Robot. Syst. 2003, 20, 45–63. [Google Scholar] [CrossRef]
- Webster, R.J., III; Jones, B.A. Design and Kinematic Modeling of Constant Curvature Continuum Robots: A Review. Int. J. Robot. Res. 2010, 29, 1661–1683. [Google Scholar] [CrossRef]
- Mahl, T.; Hildebrandt, A.; Sawodny, O. A Variable Curvature Continuum Kinematics for Kinematic Control of the Bionic Handling Assistant. IEEE Trans Robot. 2014, 30, 935–949. [Google Scholar] [CrossRef]
- Renda, F.; Cianchetti, M.; Giorelli, M.; Arienti, A.; Laschi, C. A 3d steady-state model of a tendon-driven continuum soft manipulator inspired by the octopus arm. Bioinspir. Biomim. 2012, 7, 025006. [Google Scholar] [CrossRef] [PubMed]
- Falkenhahn, V.; Mahl, T.; Hildebrandt, A.; Neumann, R.; Sawodny, O. Dynamic modeling of bellows-actuated continuum robots using the Euler–Lagrange formalism. IEEE Trans. Robot. 2015, 31, 1483–1496. [Google Scholar] [CrossRef]
- Xu, F.; Wang, H.; Au, K.W.S.; Chen, W.; Miao, Y. Underwater Dynamic Modeling for a Cable-Driven Soft Robot Arm. IEEE/ASME Trans. Mechatron. 2018, 23, 2726–2738. [Google Scholar] [CrossRef]
- Renda, F.; Cacucciolo, V.; Dias, J.; Seneviratne, L. Discrete Cosserat approach for soft robot dynamics: A new piece-wise constant strain model with torsion and shears. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 5495–5502. [Google Scholar]
- Rubin, M.B. Cosserat Theories: Shells, Rods and Points; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- Chikhaoui, M.T.; Lilge, S.; Kleinschmidt, S.; Burgner-Kahrs, J. Comparison of modeling approaches for a tendon actuated continuum robot with three extensible segments. IEEE Robot. Autom. Lett. 2019, 4, 989–996. [Google Scholar] [CrossRef]
- Chen, Y.L.; Sun, Q.; Guo, Q.; Gong, Y.J. Dynamic Modeling and Experimental Validation of a Water Hydraulic Soft Manipulator Based on an Improved Newton-Euler Iterative Method. Micromachines 2022, 13, 130. [Google Scholar] [CrossRef]
- Bailly, Y.; Amirat, Y. Modeling and control of a hybrid continuum active catheter for aortic aneurysm treatment. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005. [Google Scholar]
- Wang, H.; Chen, W.; Yu, X.; Deng, T.; Wang, X.; Pfeifer, R. Visual servo control of cable-driven soft robotic manipulator. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 57–62. [Google Scholar]
- Xu, F.; Wang, H.; Wang, J.; Au, K.W.S.; Chen, W. Underwater Dynamic Visual Servoing for a Soft Robot Arm with Online Distortion Correction. IEEE/ASME Trans. Mechatron. 2019, 24, 979–989. [Google Scholar] [CrossRef]
- Falkenhahn, V.; Hildebrandt, A.; Neumann, R.; Sawodny, O. Model-based feedforward position control of constant curvature continuum robots using feedback linearization. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; Volume 4, pp. 989–996. [Google Scholar]
- Ivansecu, M.; Stoian, V. A Controller for Hyper-Redundant Cooperative Robots. In Proceedings of the 1998 IEEE International Conference on Robotics and Automation (Cat. No.98CH36146), Victoria, BC, Canada, 17 October 1998; pp. 167–172. [Google Scholar]
- Della Santina, C.; Katzschmann, R.K.; Bicchi, A.; Rus, D. Model-based dynamic feedback control of a planar soft robot. Int. J. Robot. Res. 2020, 39, 490–513. [Google Scholar] [CrossRef]
- Marchese, A.D.; Tedrake, R.; Rus, D. Dynamics and trajectory optimization for a soft spatial fluidic elastomer manipulator. Int. J. Robot. Res. 2016, 35, 1000–1019. [Google Scholar] [CrossRef]
- Yip, M.C.; Camarillo, D.B. Model-Less Feedback Control of Continuum Manipulators in Constrained Environments. IEEE Trans. Robot. 2014, 30, 880–889. [Google Scholar] [CrossRef]
- Yip, M.C.; Camarillo, D.B. Model-Less Hybrid Position/Force Control: A Minimalist Approach for Continuum Manipulators in Unknown, Constrained Environments. IEEE Robot. Autom. Lett. 2016, 1, 844–851. [Google Scholar] [CrossRef]
- Toscano, L.; Falkenhahn, V.; Hildebrandt, A. Configuration space impedance control for continuum manipulators. In Proceedings of the 2015 6th International Conference on Automation, Robotics and Applications (ICARA), Queenstown, New Zealand, 17–19 February 2015; pp. 597–602. [Google Scholar]
- Stene, A.E. Robust Control for Articulated Intervention AUVs in the Operational Space; NTNU: Trondheim, Norway, 2019. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Variable Name | Value |
|---|---|---|
| E | the elastic modulus of the soft unit | 0.6 MPa |
| Ad | the effective area inside the soft unit | 3.14 × 10−4 m2 |
| As | the annular solid area of the soft unit | 3.93 × 10−4 m2 |
| rs | the cross-section radius of the soft manipulator | 0.05 m |
| c | the coefficient of the sliding mode surface | 3 |
| k | the coefficient of the sliding mode surface approach rate | 10 |
| Ɛ | the coefficient of the sliding mode surface approach rate | 0.01 |
| Δp | the upper bound of the interference force | 5 N |
| G | the gravity of the entire soft manipulator | 24.5 N |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Sun, Q.; Wang, J.; Zhang, J.; Zhao, P.; Gong, Y. Sliding Mode Control with Feedforward Compensation for a Soft Manipulator That Considers Environment Contact Constraints. J. Mar. Sci. Eng. 2023, 11, 1438. https://doi.org/10.3390/jmse11071438
Chen Y, Sun Q, Wang J, Zhang J, Zhao P, Gong Y. Sliding Mode Control with Feedforward Compensation for a Soft Manipulator That Considers Environment Contact Constraints. Journal of Marine Science and Engineering. 2023; 11(7):1438. https://doi.org/10.3390/jmse11071438
Chicago/Turabian StyleChen, Yinglong, Qiang Sun, Jia Wang, Junhao Zhang, Pengyu Zhao, and Yongjun Gong. 2023. "Sliding Mode Control with Feedforward Compensation for a Soft Manipulator That Considers Environment Contact Constraints" Journal of Marine Science and Engineering 11, no. 7: 1438. https://doi.org/10.3390/jmse11071438