
Underwater Color-Cast Image Enhancement by Noise Suppression and Block Effect Elimination

Abstract
:1. Introduction
- (1)
- An underwater color-cast image enhancement method based on noise suppression and blocking effect elimination is proposed, which can effectively correct the color distortion of underwater images, suppress noise and eliminate blocking effects, and provide theoretical support for underwater visual environment perception technology.
- (2)
- An automatic white balance algorithm of brightness and color balance is designed to correct the color distortion of underwater images and effectively restore the brightness and color of underwater images.
- (3)
- A noise suppression algorithm of heat conduction matrix in the wavelet domain is proposed, which can suppress the noise of the image and improve the contrast and edge details of the underwater image.
- (4)
- A block effect elimination algorithm in a compressed domain is proposed, which can eliminate the block effect in the process of image enhancement and balance the bright and dark areas in the image.
2. Models and Methods
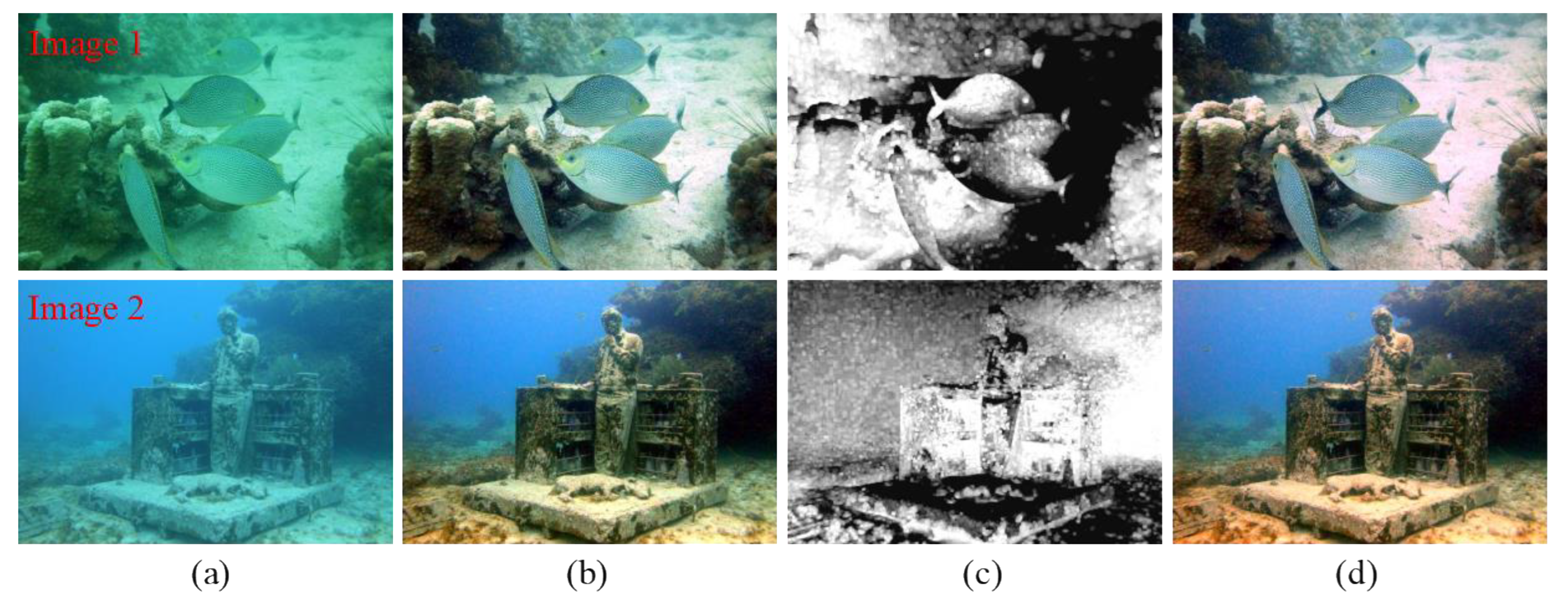
2.1. Brightness and Color Equalization Module
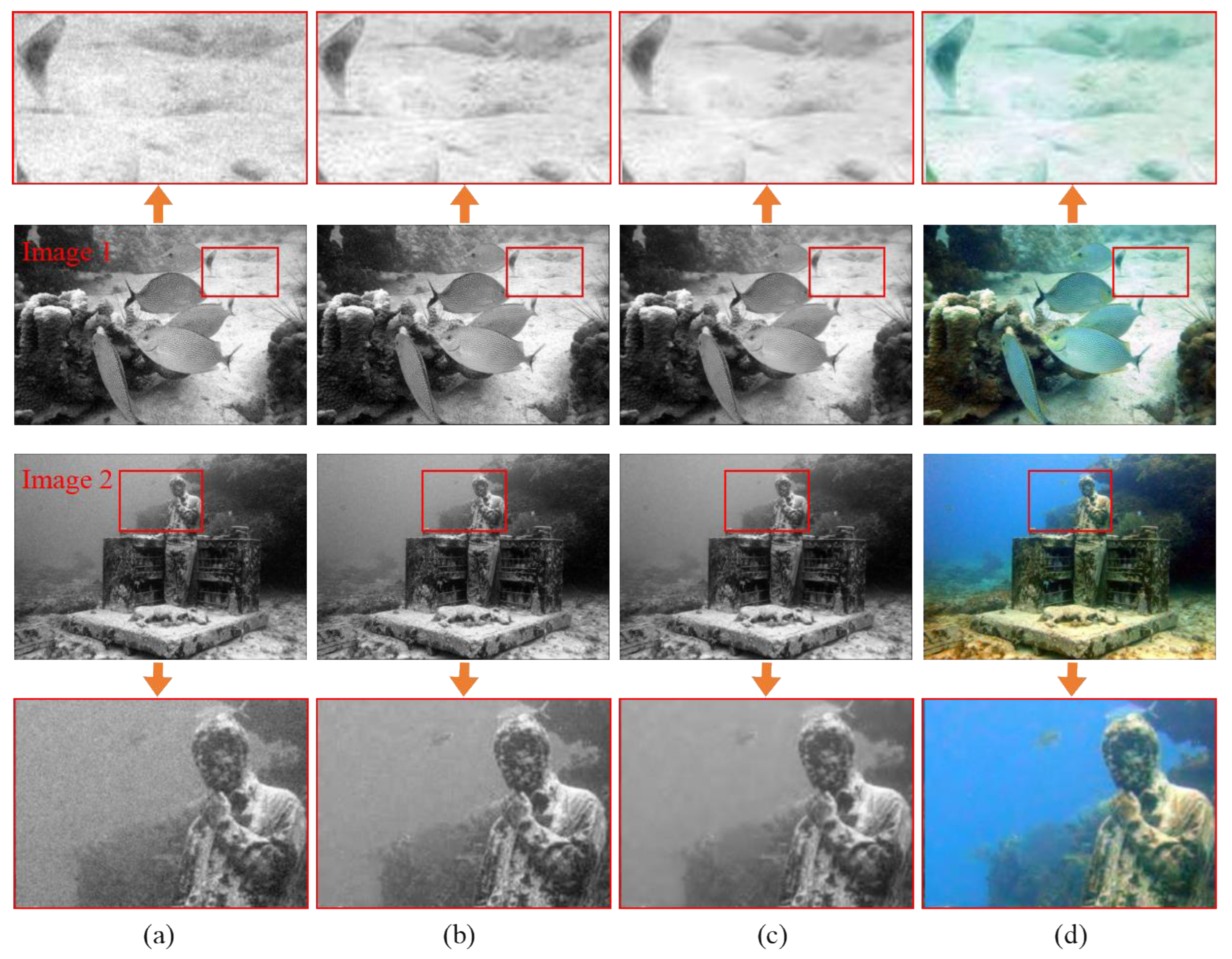
2.2. Noise Suppression Module
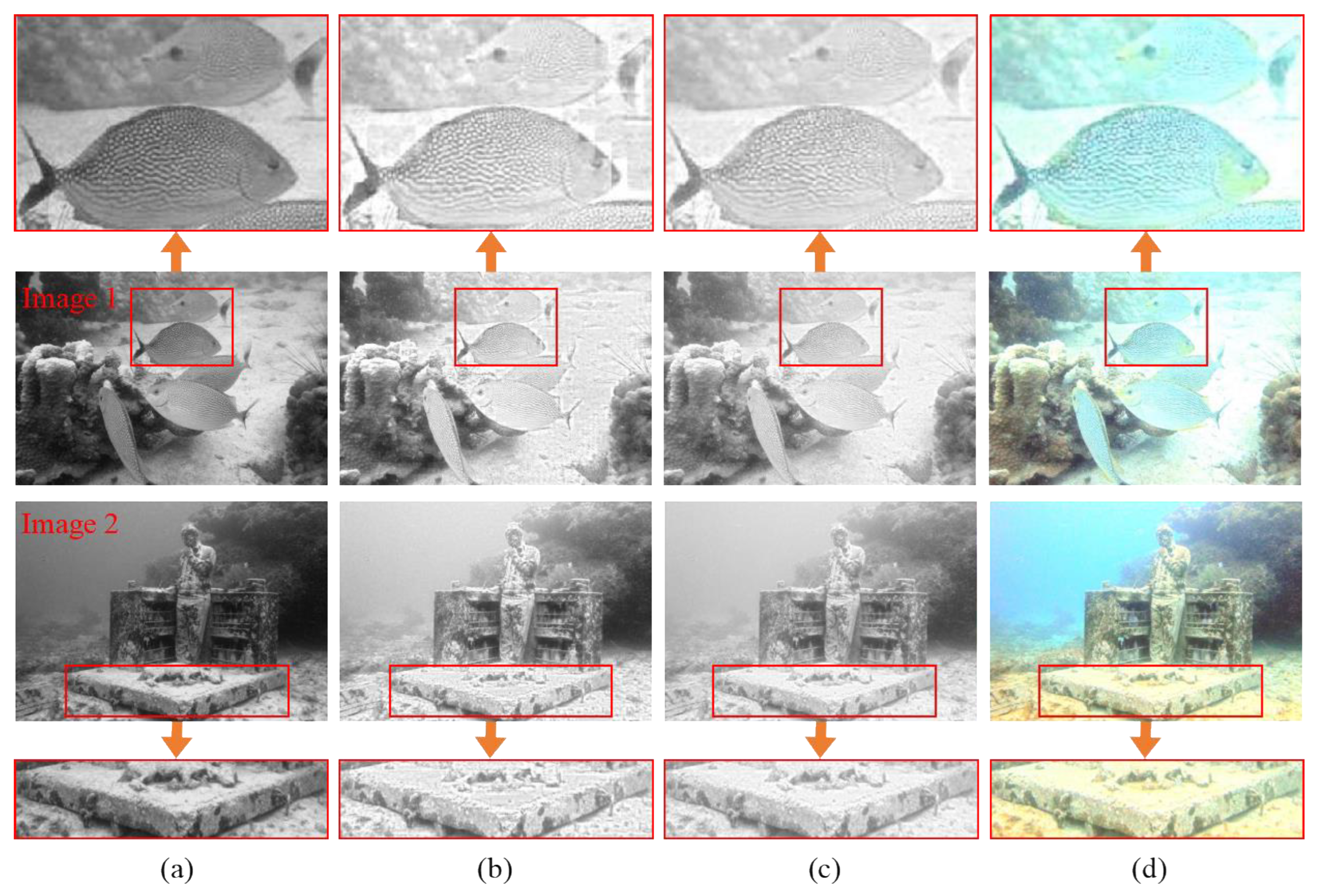
2.3. Blocking Effect Elimination Module
2.4. Multi-Scale Image Fusion Module

3. Experimental Results and Discussion
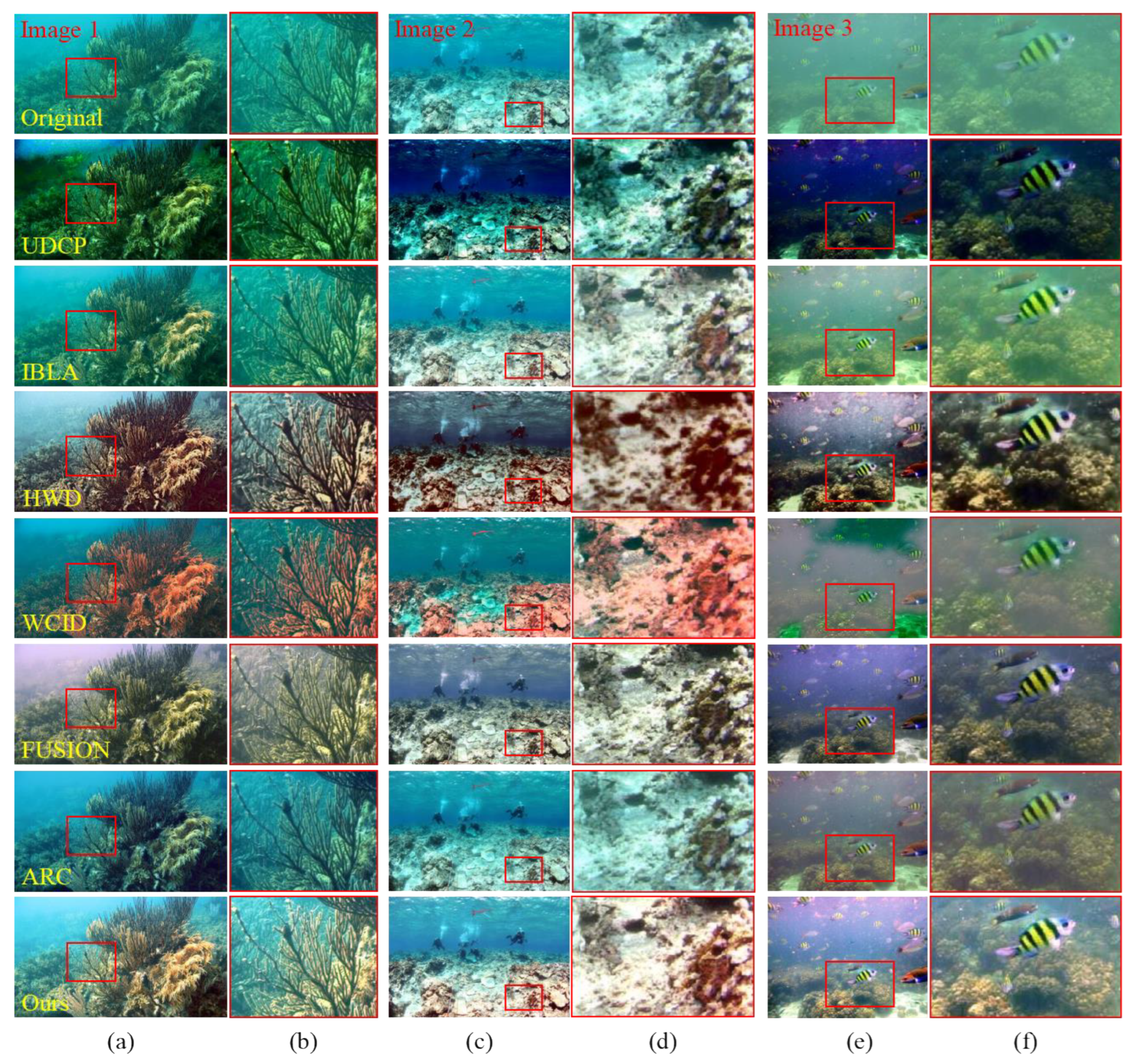
3.1. Qualitative Comparison
3.2. Quantitative Comparison
3.3. Application Test
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, Z.; Chao, X.; Hameed, I.; Li, J.; Zhao, W.; Jing, X. Biomimetic omnidirectional multi-tail underwater robot. Mech. Syst. Signal Process. 2022, 173, 109056. [Google Scholar] [CrossRef]
- Yurugi, M.; Shimanokami, M.; Nagai, T.; Shintake, J.; Ikemoto, Y. Cartilage structure increases swimming efficiency of underwater robots. Sci. Rep. 2021, 11, 11288. [Google Scholar] [CrossRef] [PubMed]
- Yao, P.; Sui, X.; Liu, Y.; Zhao, Z. Vision-based environment perception and autonomous obstacle avoidance for unmanned underwater vehicle. Appl. Ocean Res. 2023, 134, 103510. [Google Scholar] [CrossRef]
- Huang, H.; Tang, Q.; Li, J.; Zhang, W.; Bao, X.; Zhu, H.; Wang, G. A review on underwater autonomous environmental perception and target grasp, the challenge of robotic organism capture. Ocean Eng. 2020, 195, 106644. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhou, L.; Li, H.; Zhu, J.; Du, W. Marine Application Evaluation of Monocular SLAM for Underwater Robots. Sensors 2022, 22, 4657. [Google Scholar] [CrossRef]
- Chen, Q.; Zhang, Z.; Li, G. Underwater Image Enhancement Based on Color Balance and Multi-Scale Fusion. IEEE Photonics J. 2022, 14, 3963010. [Google Scholar] [CrossRef]
- Muniraj, M.; Dhandapani, V. Underwater image enhancement by modified color correction and adaptive Look-Up-Table with edge-preserving filter. Signal Process. Image Commun. 2023, 113, 116939. [Google Scholar] [CrossRef]
- Hu, J.; Jiang, Q.; Cong, R.; Gao, W.; Shao, F. Two-branch deep neural network for underwater image enhancement in HSV color space. IEEE Signal Process. Lett. 2021, 28, 2152–2156. [Google Scholar] [CrossRef]
- Peng, Y.T.; Cao, K.; Cosman, P.C. Generalization of the dark channel prior for single image restoration. IEEE Trans. Image Process. 2018, 27, 2856–2868. [Google Scholar] [CrossRef]
- Chiang, J.Y.; Chen, Y.C. Underwater image enhancement by wavelength compensation and dehazing. IEEE Trans. Image Process. 2011, 21, 1756–1769. [Google Scholar] [CrossRef]
- Jayasree, M.S.; Thavaseelan, G.; Scholar, P.G. Underwater color image enhancement using wavelength compensation and dehazing. Int. J. Comput. Sci. Eng. Commun. 2014, 2, 389–393. [Google Scholar]
- Galdran, A.; Pardo, D.; Picón, A.; Alvarez-Gila, A. Automatic red-channel underwater image restoration. J. Vis. Commun. Image Represent. 2015, 26, 132–145. [Google Scholar] [CrossRef] [Green Version]
- Drews, P.; Nascimento, E.; Moraes, F.; Botelho, S.; Campos, M. Transmission estimation in underwater single images. In Proceedings of the IEEE International Conference on Computer Vision Workshops, Sydney, Australia, 2–8 December 2013; pp. 825–830. [Google Scholar] [CrossRef]
- Peng, Y.T.; Cosman, P.C. Underwater image restoration based on image blurriness and light absorption. IEEE Trans. Image Process. 2017, 26, 1579–1594. [Google Scholar] [CrossRef]
- Wang, Y.; Song, W.; Fortino, G.; Qi, L.Z.; Zhang, W.; Liotta, A. An experimental-based review of image enhancement and image restoration methods for underwater imaging. IEEE Access 2019, 7, 140233–140251. [Google Scholar] [CrossRef]
- Ghani AS, A.; Isa NA, M. Automatic system for improving underwater image contrast and color through recursive adaptive histogram modification. Comput. Electron. Agric. 2017, 141, 181–195. [Google Scholar] [CrossRef] [Green Version]
- Ancuti, C.O.; Ancuti, C.; De Vleeschouwer, C.; Bekaert, P. Color balance and fusion for underwater image enhancement. IEEE Trans. Image Process. 2017, 27, 379–393. [Google Scholar] [CrossRef] [Green Version]
- Huang, D.; Wang, Y.; Song, W.; Sequeira, J.; Mavromatis, S. Shallow-water image enhancement using relative global histogram stretching based on adaptive parameter acquisition. In MultiMedia Modeling: Proceedings of the 24th International Conference, MMM 2018, Bangkok, Thailand, 5–7 February 2018; Proceedings, Part I 24; Springer International Publishing: Berlin/Heidelberg, Germany, 2018; pp. 453–465. [Google Scholar] [CrossRef] [Green Version]
- Hou, G.; Pan, Z.; Huang, B.; Wang, G.; Luan, X. Hue preserving-based approach for underwater colour image enhancement. IET Image Process. 2018, 12, 292–298. [Google Scholar] [CrossRef]
- Katırcıoğlu, F. Colour image enhancement with brightness preservation and edge sharpening using a heat conduction matrix. IET Image Process. 2020, 14, 3202–3214. [Google Scholar] [CrossRef]
- Mukherjee, J.; Mitra, S.K. Enhancement of color images by scaling the DCT coefficients. IEEE Trans. Image Process. 2008, 17, 1783–1794. [Google Scholar] [CrossRef] [PubMed]
- Bai, L.; Zhang, W.; Pan, X.; Zhao, C. Underwater image enhancement based on global and local equalization of histogram and dual-image multi-scale fusion. IEEE Access 2020, 8, 128973–128990. [Google Scholar] [CrossRef]
- Li, C.; Guo, J.; Guo, C. Emerging from water: Underwater image color correction based on weakly supervised color transfer. IEEE Signal Process. Lett. 2018, 25, 323–327. [Google Scholar] [CrossRef] [Green Version]
- Yu, X.; Qu, Y.; Hong, M. Underwater-GAN: Underwater image restoration via conditional generative adversarial network. In Pattern Recognition and Information Forensics: Proceedings of the ICPR 2018 International Workshops, CVAUI, IWCF, and MIPPSNA, Beijing, China, 20–24 August 2018; Revised Selected Papers 24; Springer International Publishing: Berlin/Heidelberg, Germany, 2019; pp. 66–75. [Google Scholar] [CrossRef]
- Pan, P.; Yuan, F.; Cheng, E. Underwater image de-scattering and enhancing using dehazenet and HWD. J. Mar. Sci. Technol. 2018, 26, 6. [Google Scholar] [CrossRef]
- Anwar, S.; Li, C. Diving deeper into underwater image enhancement: A survey. Signal Process. Image Commun. 2020, 89, 115978. [Google Scholar] [CrossRef]
- Chung, Y.L.; Chung, H.Y.; Chen, Y.S. A Study of Single Image Haze Removal Using a Novel White-Patch RetinexBased Improved Dark Channel Prior Algorithm. Intell. Autom. Soft Comput. 2020, 26, 367–383. [Google Scholar]
- Song, H.; Wang, R. Underwater image enhancement based on multi-scale fusion and global stretching of dual-model. Mathematics 2021, 9, 595. [Google Scholar] [CrossRef]
- Li, C.; Guo, C.; Ren, W.; Cong, R.; Hou, J.; Kwong, S.; Tao, D. An underwater image enhancement benchmark dataset and beyond. IEEE Trans. Image Process. 2019, 29, 4376–4389. [Google Scholar] [CrossRef] [Green Version]
- Zhou, J.; Zhang, D.; Zou, P.; Zhang, W.; Zhang, W. Retinex-based laplacian pyramid method for image defogging. IEEE Access 2019, 7, 122459–122472. [Google Scholar] [CrossRef]
- Eskicioglu, A.M.; Fisher, P.S. Image quality measures and their performance. IEEE Trans. Commun. 1995, 43, 2959–2965. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Zhang, L.; Mou, X.; Zhang, D. FSIM: A feature similarity index for image quality assessment. IEEE Trans. Image Process. 2011, 20, 2378–2386. [Google Scholar] [CrossRef] [Green Version]
- Yang, M.; Sowmya, A. An underwater color image quality evaluation metric. IEEE Trans. Image Process. 2015, 24, 6062–6071. [Google Scholar] [CrossRef]
- Zhang, W. Combination of SIFT and Canny edge detection for registration between SAR and optical images. IEEE Geosci. Remote Sens. Lett. 2020, 19, 4007205. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image | Evaluation | Original Image | UDCP | IBLA | HWD | WCID | FUSION | ARC | Ours |
|---|---|---|---|---|---|---|---|---|---|
| Image 1 | IE | 6.1730 | 7.0756 | 6.8205 | 7.6736 | 6.7709 | 7.6110 | 7.3386 | 7.8367 |
| SF | 7.1611 | 18.9345 | 13.1641 | 21.4327 | 20.9087 | 18.4898 | 14.1668 | 24.5150 | |
| AVG | 4.0169 | 9.6824 | 7.0680 | 12.7567 | 11.3337 | 10.3918 | 7.8155 | 14.0663 | |
| UCIQE | 0.3412 | 0.5254 | 0.3920 | 0.5775 | 0.5638 | 0.5444 | 0.4955 | 0.6092 | |
| PCQI | 0.1155 | 0.9269 | 0.3492 | 1.4669 | 1.4055 | 1.0272 | 0.5606 | 1.7884 | |
| UIQM | −1.0844 | 2.8537 | 0.1935 | 4.2822 | 4.1925 | 5.4152 | 3.1842 | 5.7959 | |
| Image 2 | IE | 6.9273 | 6.3046 | 7.5011 | 7.6830 | 6.8700 | 7.6020 | 7.4544 | 7.8081 |
| SF | 7.1706 | 6.6462 | 12.4892 | 13.1213 | 11.8997 | 13.6910 | 11.5925 | 14.7812 | |
| AVG | 3.6784 | 3.2128 | 6.1060 | 7.0207 | 5.5016 | 6.6600 | 5.6504 | 7.5488 | |
| UCIQE | 0.4788 | 0.4697 | 0.5723 | 0.5931 | 0.5775 | 0.5753 | 0.5897 | 0.6377 | |
| PCQI | 0.1634 | 0.1655 | 0.4702 | 0.7884 | 0.5563 | 0.7870 | 0.5425 | 0.7300 | |
| UIQM | 0.3890 | 1.3871 | 2.0448 | 4.5529 | 3.1865 | 4.6508 | 3.6126 | 4.6494 | |
| Image 3 | IE | 7.2758 | 6.4948 | 7.6227 | 7.7248 | 6.8425 | 7.6880 | 7.4372 | 7.8066 |
| SF | 9.0983 | 10.8452 | 13.7887 | 13.1459 | 14.2047 | 14.9623 | 9.5933 | 15.9068 | |
| AVG | 4.5316 | 4.9056 | 6.9629 | 7.1850 | 7.0474 | 7.3011 | 4.9649 | 8.2921 | |
| UCIQE | 0.5103 | 0.5679 | 0.5522 | 0.5870 | 0.5880 | 0.5604 | 0.5606 | 0.6115 | |
| PCQI | 0.2366 | 0.5175 | 0.4865 | 0.7115 | 0.6332 | 0.7309 | 0.3410 | 0.6950 | |
| UIQM | 1.2895 | 3.6031 | 2.6220 | 4.5301 | 2.1466 | 4.3712 | 2.4874 | 4.5686 | |
| Image 4 | IE | 6.4022 | 6.1045 | 6.7861 | 7.6169 | 6.2930 | 7.1979 | 6.9821 | 7.4177 |
| SF | 9.6588 | 14.9818 | 11.7586 | 17.2785 | 17.0975 | 14.0079 | 11.3911 | 21.2587 | |
| AVG | 3.9917 | 5.6029 | 5.0714 | 7.9500 | 7.6011 | 5.9433 | 4.7747 | 9.9995 | |
| UCIQE | 0.4595 | 0.5386 | 0.5128 | 0.6153 | 0.5462 | 0.5472 | 0.5441 | 0.6460 | |
| PCQI | 0.2097 | 0.7527 | 0.3151 | 1.0090 | 0.8265 | 0.6262 | 0.3532 | 1.1339 | |
| UIQM | −1.1012 | 0.9939 | −0.3045 | 3.4181 | 3.0988 | 3.1856 | 0.3089 | 3.8822 | |
| Image 5 | IE | 7.1977 | 7.1668 | 7.5379 | 7.6535 | 7.2188 | 7.6854 | 7.5304 | 7.9026 |
| SF | 17.2602 | 22.6997 | 20.4228 | 21.7335 | 28.5593 | 25.5970 | 18.5187 | 30.1024 | |
| AVG | 7.8303 | 10.2353 | 9.6517 | 10.7348 | 12.8359 | 11.0387 | 8.8036 | 13.9104 | |
| UCIQE | 0.5227 | 0.6200 | 0.5667 | 0.6159 | 0.6182 | 0.5597 | 0.5981 | 0.6559 | |
| PCQI | 0.7617 | 1.8689 | 1.1657 | 1.8462 | 2.4584 | 2.0905 | 1.1066 | 2.4011 | |
| UIQM | 0.5072 | 2.9257 | 2.0424 | 3.7696 | 2.7125 | 4.7360 | 2.0239 | 4.7363 | |
| Image 6 | IE | 6.8182 | 7.1318 | 7.2758 | 7.7073 | 6.2652 | 7.6673 | 7.4053 | 7.7350 |
| SF | 4.7954 | 6.4699 | 6.7351 | 10.4445 | 6.4032 | 8.8425 | 7.2828 | 9.6852 | |
| AVG | 2.4374 | 3.2586 | 3.5034 | 6.0534 | 3.2567 | 4.4011 | 3.7650 | 5.3092 | |
| UCIQE | 0.4190 | 0.5262 | 0.4740 | 0.5920 | 0.4980 | 0.5398 | 0.5691 | 0.6237 | |
| PCQI | 0.0705 | 0.1543 | 0.1461 | 0.2908 | 0.1610 | 0.3510 | 0.2378 | 0.5252 | |
| UIQM | −1.1549 | 1.9136 | 0.3493 | 3.7068 | 2.1806 | 3.0121 | 1.7157 | 3.7351 | |
| Image 7 | IE | 6.7866 | 6.4223 | 7.2479 | 7.6995 | 6.4903 | 7.6013 | 7.3318 | 7.7558 |
| SF | 6.2295 | 8.9492 | 8.5717 | 13.1801 | 9.1468 | 11.3936 | 8.2485 | 13.9449 | |
| AVG | 3.6579 | 4.7825 | 5.0653 | 7.6213 | 5.1488 | 6.5304 | 4.8770 | 7.8985 | |
| UCIQE | 0.4660 | 0.5955 | 0.5329 | 0.6248 | 0.5259 | 0.6222 | 0.6004 | 0.6729 | |
| PCQI | 0.1271 | 0.4079 | 0.2501 | 0.7353 | 0.3234 | 0.6748 | 0.2851 | 0.8334 | |
| UIQM | 0.0866 | 1.7185 | 1.1415 | 3.8796 | 3.1447 | 3.6038 | 1.9316 | 3.8761 | |
| Average | IE | 6.7973 | 6.6715 | 7.2560 | 7.6798 | 6.6787 | 7.5790 | 7.3543 | 7.7518 |
| SF | 8.7677 | 12.7895 | 12.4186 | 15.7624 | 15.4600 | 15.2834 | 11.5420 | 18.5992 | |
| AVG | 4.3063 | 5.9543 | 6.2041 | 8.4746 | 7.5322 | 7.4666 | 5.8073 | 9.5750 | |
| UCIQE | 0.4568 | 0.5490 | 0.5147 | 0.6008 | 0.5597 | 0.5641 | 0.5654 | 0.6367 | |
| PCQI | 0.2406 | 0.6848 | 0.4547 | 0.9783 | 0.9092 | 0.8982 | 0.4895 | 1.1581 | |
| UIQM | −0.1526 | 2.1994 | 1.1556 | 4.0199 | 2.9517 | 4.1392 | 2.1806 | 4.4634 |
| Image | Evaluation | Original Image | UDCP | IBLA | HWD | WCID | FUSION | ARC | Ours |
|---|---|---|---|---|---|---|---|---|---|
| Image 1 | IE | 6.9413 | 7.1788 | 7.6517 | 7.7043 | 6.8687 | 7.4658 | 7.5773 | 7.7702 |
| SF | 16.5507 | 22.4061 | 23.7404 | 25.8526 | 24.9547 | 27.6475 | 21.7263 | 28.3122 | |
| AVG | 9.1179 | 12.2500 | 13.8986 | 15.1799 | 12.9638 | 14.7825 | 12.6657 | 16.0165 | |
| UCIQE | 0.4790 | 0.6017 | 0.5917 | 0.5843 | 0.5468 | 0.5831 | 0.5670 | 0.6063 | |
| PCQI | 0.8191 | 2.6184 | 1.7355 | 2.3345 | 2.3160 | 2.7781 | 1.6140 | 2.9782 | |
| UIQM | 4.1100 | 4.4031 | 5.1453 | 4.8751 | 4.6889 | 4.9529 | 5.1750 | 5.0115 | |
| Image 2 | IE | 6.1807 | 6.5237 | 6.9405 | 7.5977 | 6.5810 | 7.0964 | 7.0210 | 7.4781 |
| SF | 7.5997 | 15.2537 | 11.1595 | 17.3059 | 12.3343 | 16.9424 | 11.4035 | 17.6959 | |
| AVG | 3.8277 | 7.2732 | 6.3265 | 10.4345 | 6.1023 | 8.6055 | 6.3742 | 10.4866 | |
| UCIQE | 0.4398 | 0.5985 | 0.5324 | 0.6282 | 0.5275 | 0.6169 | 0.5727 | 0.6361 | |
| PCQI | 0.1475 | 0.9104 | 0.3155 | 0.7985 | 0.6047 | 1.0453 | 0.4666 | 1.2467 | |
| UIQM | 1.9781 | 3.3552 | 3.5295 | 4.0038 | 2.8710 | 3.9887 | 4.1131 | 4.3789 | |
| Image 3 | IE | 7.7281 | 5.9921 | 7.6008 | 7.6462 | 7.4401 | 7.6910 | 7.6617 | 7.9219 |
| SF | 11.0799 | 10.2487 | 11.9238 | 10.9366 | 13.3751 | 13.9125 | 12.8272 | 15.9482 | |
| AVG | 4.6015 | 4.2366 | 5.0169 | 5.0204 | 5.5886 | 5.5834 | 5.4538 | 6.6066 | |
| UCIQE | 0.6001 | 0.5273 | 0.6162 | 0.5525 | 0.6483 | 0.5950 | 0.5924 | 0.6054 | |
| PCQI | 0.6613 | 0.7800 | 0.9957 | 0.5861 | 0.9639 | 0.8825 | 0.8101 | 1.0562 | |
| UIQM | 1.5430 | 1.6192 | 2.5134 | 3.0406 | 3.2798 | 2.4863 | 2.5992 | 3.4429 | |
| Image 4 | IE | 6.6410 | 6.3765 | 7.1880 | 7.7222 | 6.5033 | 7.7030 | 6.9132 | 7.7449 |
| SF | 3.9538 | 14.5004 | 5.2084 | 7.4497 | 6.0109 | 10.0183 | 4.2353 | 7.8849 | |
| AVG | 1.6643 | 4.6287 | 2.3592 | 4.2025 | 2.2232 | 4.5312 | 1.8866 | 4.0729 | |
| UCIQE | 0.4177 | 0.5688 | 0.4890 | 0.5942 | 0.4848 | 0.5710 | 0.4824 | 0.6073 | |
| PCQI | 0.0322 | 0.1537 | 0.0632 | 0.2154 | 0.0962 | 0.2328 | 0.0443 | 0.6421 | |
| UIQM | −0.2032 | 1.8418 | 0.5754 | 3.0802 | 3.0837 | 2.6809 | 0.9180 | 3.1075 | |
| Image 5 | IE | 6.9984 | 5.8732 | 7.5364 | 7.6858 | 6.5305 | 7.4274 | 7.2002 | 7.7910 |
| SF | 3.2520 | 3.4841 | 5.0970 | 5.6284 | 4.0174 | 5.2747 | 3.8886 | 6.0968 | |
| AVG | 1.8816 | 1.6021 | 3.0876 | 3.7066 | 2.2733 | 3.1048 | 2.2563 | 3.6260 | |
| UCIQE | 0.4676 | 0.5069 | 0.5459 | 0.5352 | 0.5055 | 0.5546 | 0.4937 | 0.5814 | |
| PCQI | 0.0388 | 0.0772 | 0.1336 | 0.1537 | 0.0739 | 0.1390 | 0.0527 | 0.1945 | |
| UIQM | 2.3480 | 3.2217 | 4.0281 | 4.1381 | 2.7323 | 3.8985 | 3.0845 | 4.0683 | |
| Image 6 | IE | 5.8945 | 6.6629 | 7.0873 | 7.7094 | 6.2580 | 7.5810 | 7.0100 | 7.7791 |
| SF | 2.2938 | 5.2742 | 3.6473 | 7.2574 | 2.3987 | 5.8954 | 3.5809 | 6.5521 | |
| AVG | 1.3702 | 2.8764 | 2.3579 | 4.6705 | 1.3028 | 3.6526 | 2.2283 | 4.0897 | |
| UCIQE | 0.3683 | 0.5397 | 0.5267 | 0.5993 | 0.4110 | 0.6040 | 0.5334 | 0.6343 | |
| PCQI | 0.0139 | 0.1065 | 0.0475 | 0.1366 | 0.0288 | 0.1375 | 0.0733 | 0.2337 | |
| UIQM | 2.0476 | 4.4508 | 3.4762 | 4.3846 | 3.6359 | 3.9020 | 3.6001 | 5.2295 | |
| Image 7 | IE | 6.1759 | 6.7924 | 7.2614 | 7.7005 | 6.1213 | 7.5970 | 7.2277 | 7.8172 |
| SF | 4.4066 | 10.9227 | 9.2212 | 12.5761 | 6.5210 | 13.2963 | 9.6893 | 13.4009 | |
| AVG | 2.3878 | 5.4169 | 4.8795 | 7.8970 | 3.2288 | 6.9882 | 5.3026 | 7.6241 | |
| UCIQE | 0.3562 | 0.5335 | 0.4754 | 0.5726 | 0.3900 | 0.5814 | 0.5314 | 0.5987 | |
| PCQI | 0.0447 | 0.3674 | 0.1889 | 0.4812 | 0.1399 | 0.5596 | 0.3156 | 0.6488 | |
| UIQM | 1.0481 | 2.2040 | 2.5637 | 4.5171 | 2.2803 | 4.7816 | 4.3655 | 4.8693 | |
| Average | IE | 6.6514 | 6.4857 | 7.3237 | 7.6809 | 6.6147 | 7.5088 | 7.2302 | 7.7575 |
| SF | 7.0195 | 11.7271 | 9.9997 | 12.4295 | 9.9446 | 13.2839 | 9.6216 | 13.6987 | |
| AVG | 3.5501 | 5.4691 | 5.4180 | 7.3016 | 4.8118 | 6.7497 | 5.1668 | 7.5032 | |
| UCIQE | 0.4470 | 0.5538 | 0.5396 | 0.5809 | 0.5020 | 0.5866 | 0.5390 | 0.6099 | |
| PCQI | 0.2511 | 0.7162 | 0.4971 | 0.6723 | 0.6033 | 0.8250 | 0.4824 | 1.0000 | |
| UIQM | 1.8388 | 3.0137 | 3.1188 | 4.0056 | 3.2246 | 3.8130 | 3.4079 | 4.3011 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ning, Y.; Jin, Y.-P.; Peng, Y.-D.; Yan, J. Underwater Color-Cast Image Enhancement by Noise Suppression and Block Effect Elimination. J. Mar. Sci. Eng. 2023, 11, 1226. https://doi.org/10.3390/jmse11061226
Ning Y, Jin Y-P, Peng Y-D, Yan J. Underwater Color-Cast Image Enhancement by Noise Suppression and Block Effect Elimination. Journal of Marine Science and Engineering. 2023; 11(6):1226. https://doi.org/10.3390/jmse11061226
Chicago/Turabian StyleNing, Yu, Yong-Ping Jin, You-Duo Peng, and Jian Yan. 2023. "Underwater Color-Cast Image Enhancement by Noise Suppression and Block Effect Elimination" Journal of Marine Science and Engineering 11, no. 6: 1226. https://doi.org/10.3390/jmse11061226