
A Novel Robust IMM Filtering Method for Surface-Maneuvering Target Tracking with Random Measurement Delay


Abstract
:1. Introduction
- The one-step predictive probability density function (PDF) and HTMN are assumed to obey Gaussian and STDs, respectively. This paper presents an RBV to characterize the OSRMD in JMSs. Aiming to introduce the VB method directly, this article converts measurement likelihood function form from weighted summation to exponential product, and constructs the HGSSM.
- To address the coupled state vectors and the noise covariance matrices, a novel IMM filter is designed by combining the VB theory with IMM method. In measurement update part, the mode conditional posterior PDFs are approximated recursively. The state vectors, RBVs, model probabilities, and unknown parameters are estimated through VB technique. Then, the final estimates are obtained by the weighted sum of sub-filters.
- Four parts of the surface target tracking simulation indicate that the presented method outperforms existing IMM filters on estimation accuracy. The presented algorithm provides a robust solution to the filtering problem in the scenarios of HTMNs coexisting with OSRMD.
2. Problem Statement
3. Construction of the HGSSM
3.1. Measurement Likelihood PDF Convertion
3.2. Prior PDFs Selection
4. Design of the Proposed Filter
| Algorithm 1: One filtering iteration of the designed algorithm. |
 |
5. Simulation Results of Maneuvering Target Tracking
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Zhang, W.; Zhao, X.; Liu, Z.; Liu, K.; Chen, B. Converted state equation Kalman filter for nonlinear maneuvering target tracking. Signal Process. 2023, 202, 108741. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, Y.; Zhao, Y.; Shi, P.; Chambers, J.A. A novel outlier-robust Kalman filtering framework based on statistical similarity measure. IEEE Trans. Autom. Control 2020, 66, 2677–2692. [Google Scholar] [CrossRef]
- Xu, B.; Hu, J.; Guo, Y. An Acoustic Ranging Measurement Aided SINS/DVL Integrated Navigation Algorithm Based on Multivehicle Cooperative Correction. IEEE Trans. Instrum. Meas. 2022, 71, 1–15. [Google Scholar] [CrossRef]
- Demirci, M.; Gözde, H.; Taplamacioglu, M.C. Improvement of power transformer fault diagnosis by using sequential Kalman filter sensor fusion. Int. J. Electr. Power Energy Syst. 2023, 149, 109038. [Google Scholar] [CrossRef]
- Lindner, L.; Sergiyenko, O.; Rivas-López, M.; Ivanov, M.; Rodríguez-Quiñonez, J.C.; Hernández-Balbuena, D.; Flores-Fuentes, W.; Tyrsa, V.; Muerrieta-Rico, F.N.; Mercorelli, P. Machine vision system errors for unmanned aerial vehicle navigation. In Proceedings of the 2017 IEEE 26th International Symposium on Industrial Electronics (ISIE), Edinburgh, UK, 19–21 June 2017; pp. 1615–1620. [Google Scholar]
- Mercorelli, P.; Lehmann, K.; Liu, S. Robust flatness based control of an electromagnetic linear actuator using adaptive PID controller. In Proceedings of the 42nd IEEE International Conference on Decision and Control (IEEE Cat. No. 03CH37475), Maui, HI, USA, 9–12 December 2003; Volume 4, pp. 3790–3795. [Google Scholar]
- Li, K.; Zhao, S.; Liu, F. Joint state estimation for nonlinear state-space model with unknown time-variant noise statistics. Int. J. Adapt. Control Signal Process. 2021, 35, 498–512. [Google Scholar] [CrossRef]
- Li, X.R.; Jilkov, V.P. Survey of maneuvering target tracking. Part V. Multiple-model methods. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1255–1321. [Google Scholar]
- Freni, G.; Mannina, G.; Viviani, G. Urban runoff modelling uncertainty: Comparison among Bayesian and pseudo-Bayesian methods. Environ. Model. Softw. 2009, 24, 1100–1111. [Google Scholar] [CrossRef]
- Djuric, P.M.; Kotecha, J.H.; Zhang, J.; Huang, Y.; Ghirmai, T.; Bugallo, M.F.; Miguez, J. Particle filtering. IEEE Signal Process. Mag. 2003, 20, 19–38. [Google Scholar] [CrossRef]
- Seah, C.E.; Hwang, I. Algorithm for performance analysis of the IMM algorithm. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1114–1124. [Google Scholar] [CrossRef]
- Hwang, I.; Seah, C.E.; Lee, S. A study on stability of the interacting multiple model algorithm. IEEE Trans. Autom. Control 2016, 62, 901–906. [Google Scholar] [CrossRef]
- Zhao, S.; Ahn, C.; Shi, P.; Shmaliy, Y.; Liu, F. Bayesian State Estimations for Markovian Jump Systems: Employing Recursive Steps and Pseudocodes. IEEE Syst. Man, Cybern. Mag. 2019, 5, 27–36. [Google Scholar] [CrossRef]
- Li, J.; Yuan, G.; Duan, H. Consensus CIF-Based IMM Filtering for Multiple-UAV Target Tracking. In Proceedings of the 2022 International Conference on Guidance, Navigation and Control: Advances in Guidance, Navigation and Control, Tianjin, China, 23–25 October 2020; pp. 7060–7069. [Google Scholar]
- Youn, W.; Ko, N.Y.; Gadsden, S.A.; Myung, H. A novel multiple-model adaptive Kalman filter for an unknown measurement loss probability. IEEE Trans. Instrum. Meas. 2020, 70, 1–11. [Google Scholar] [CrossRef]
- Zubača, J.; Stolz, M.; Seeber, R.; Schratter, M.; Watzenig, D. Innovative Interaction Approach in IMM Filtering for Vehicle Motion Models With Unequal States Dimension. IEEE Trans. Veh. Technol. 2022, 71, 3579–3594. [Google Scholar] [CrossRef]
- Blair, W.D.; Watson, G. Interacting multiple bias model algorithm with application to tracking maneuvering targets. In Proceedings of the 1992 31st IEEE Conference on Decision and Control, Tucson, AZ, USA, 16–18 December 1992; pp. 3790–3795. [Google Scholar]
- Sarkka, S.; Nummenmaa, A. Recursive noise adaptive Kalman filtering by variational Bayesian approximations. IEEE Trans. Autom. Control 2009, 54, 596–600. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, Y.; Wu, Z.; Li, N.; Chambers, J. A novel adaptive Kalman filter with inaccurate process and measurement noise covariance matrices. IEEE Trans. Autom. Control 2017, 63, 594–601. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, Y.; Li, N.; Wu, Z.; Chambers, J.A. A novel robust Student’s t-based Kalman filter. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1545–1554. [Google Scholar] [CrossRef]
- Zhu, H.; Zhang, G.; Li, Y.; Leung, H. An adaptive Kalman filter with inaccurate noise covariances in the presence of outliers. IEEE Trans. Autom. Control 2021, 67, 374–381. [Google Scholar] [CrossRef]
- Jia, G.; Huang, Y.; Zhang, Y.; Chambers, J. A novel adaptive Kalman filter with unknown probability of measurement loss. IEEE Signal Process. Lett. 2019, 26, 1862–1866. [Google Scholar] [CrossRef]
- Wang, G.; Wang, X.; Zhang, Y. Variational Bayesian IMM-filter for JMSs with unknown noise covariances. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 1652–1661. [Google Scholar] [CrossRef]
- Shen, C.; Xu, D.; Huang, W.; Shen, F. An interacting multiple model approach for state estimation with non-Gaussian noise using a variational Bayesian method. Asian J. Control 2015, 17, 1424–1434. [Google Scholar] [CrossRef]
- Li, D.; Sun, J. Robust Interacting Multiple Model Filter Based on Student’st-Distribution for Heavy-Tailed Measurement Noises. Sensors 2019, 19, 4830. [Google Scholar] [CrossRef] [PubMed]
- Yan, B.; Zuo, J.; Chen, X.; Zou, H. Improved multiple model particle filter for maneuvering target tracking in the presence of delayed measurements. In Proceedings of the 2017 International Conference on Computer Systems, Electronics and Control (ICCSEC), Dalian, China, 25–27 December 2017; pp. 810–814. [Google Scholar]
- Wang, X.; Liang, Y.; Pan, Q.; Zhao, C. Gaussian filter for nonlinear systems with one-step randomly delayed measurements. Automatica 2013, 49, 976–986. [Google Scholar] [CrossRef]
- Tong, Y.; Zheng, Z.; Fan, W.; Li, Q.; Liu, Z. An improved unscented Kalman filter for nonlinear systems with one-step randomly delayed measurement and unknown latency probability. Digit. Signal Process. 2022, 121, 103324. [Google Scholar] [CrossRef]
- Ito, K.; Xiong, K. Gaussian filters for nonlinear filtering problems. IEEE Trans. Autom. Control 2000, 45, 910–927. [Google Scholar] [CrossRef]
- Bai, M.; Huang, Y.; Chen, B.; Yang, L.; Zhang, Y. A novel mixture distributions-based robust Kalman filter for cooperative localization. IEEE Sens. J. 2020, 20, 14994–15006. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, Y.; Zhao, Y.; Chambers, J.A. A novel robust Gaussian–Student’s t mixture distribution based Kalman filter. IEEE Trans. Signal Process. 2019, 67, 3606–3620. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, Y.; Chambers, J.A. A novel Kullback–Leibler divergence minimization-based adaptive student’s t-filter. IEEE Trans. Signal Process. 2019, 67, 5417–5432. [Google Scholar] [CrossRef]
- Lu, C.; Feng, W.; Li, W.; Zhang, Y.; Guo, Y. An adaptive IMM filter for jump Markov systems with inaccurate noise covariances in the presence of missing measurements. Digit. Signal Process. 2022, 127, 103529. [Google Scholar] [CrossRef]
- Roth, M.; Özkan, E.; Gustafsson, F. A Student’s t filter for heavy tailed process and measurement noise. In Proceedings of the 2013 IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013; pp. 5770–5774. [Google Scholar]
- Jia, G.; Huang, Y.; Bai, M.B.; Zhang, Y. A novel robust Kalman filter with non-stationary heavy-tailed measurement noise. IFAC-PapersOnLine 2020, 53, 368–373. [Google Scholar] [CrossRef]
- Fu, H.; Cheng, Y. A Novel Robust Kalman Filter Based on Switching Gaussian-Heavy-Tailed Distribution. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 3012–3016. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Definition | Notation | Definition |
|---|---|---|---|
| VB | Variational Bayesian | HGSSM | Hierarchical Gaussian state space model |
| KF | Kalman filter | OSRMD | One-step random measurement delay |
| Probability density function | Gaussian distribution, | ||
| JMS | Jump Markov system | -mean vector, P-scale matrix | |
| STD | student’s t-distribution | Student’s t-distribution, | |
| RBV | Random Bernoulli variable | -mean vector, P-scale matrix, | |
| KLD | Kullback-Leibler divergence | v-degree of freedom parameter | |
| Expectation computation | Gamma distribution, | ||
| Trace operation | a-shape parameter, | ||
| HTMN | Heavy-tailed measurement noise | b-rate parameter |
| Index | Values |
|---|---|
| Probability of OSRMD | 0.5 |
| Sampling interval D | |
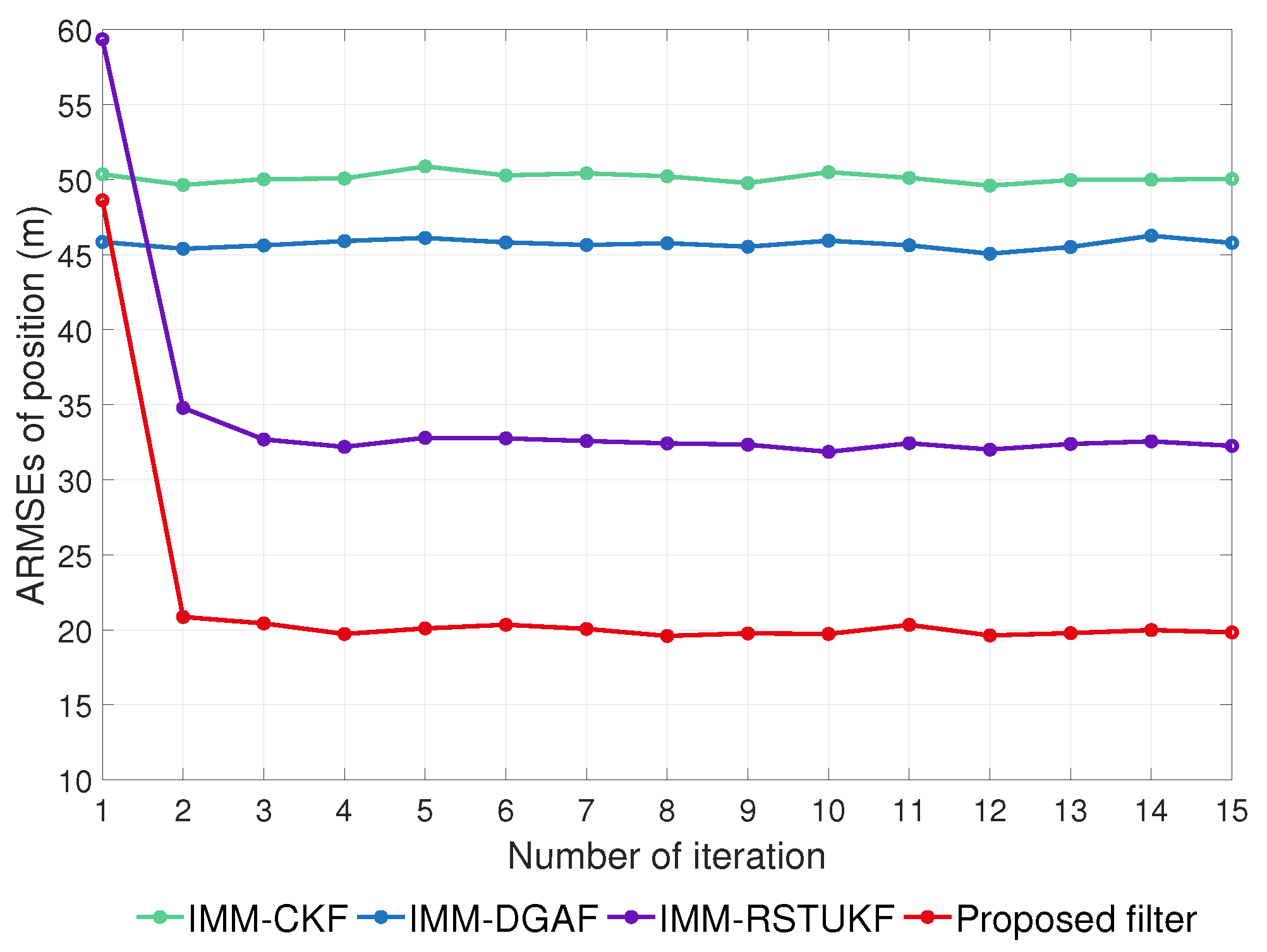
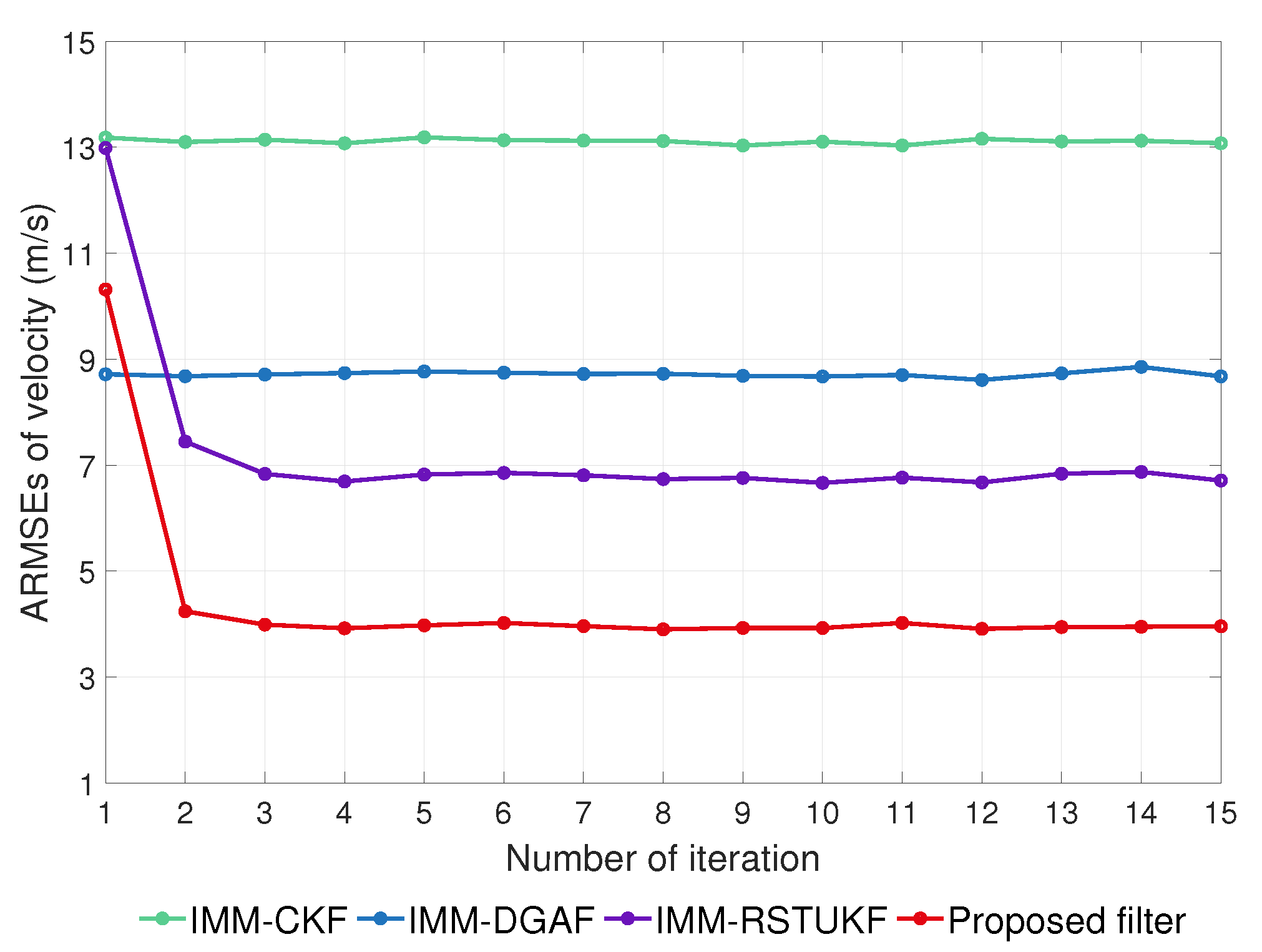
| Number of iterations N | 10 |
| Filtering parameter | |
| Simulation time | 1000 s |
| Power spectral densities | 0.1 ms |
| Power spectral densities | 1.75 × 10 rads |
| Transition probability matrix T | . |
| Time (s) | Filter 1 | Filter 2 | Filter 3 | Filter 4 | |
|---|---|---|---|---|---|
| ARMSE (m) | 1∼200 | 37.28 | 24.42 | 27.69 | 12.77 |
| 201∼400 | 53.33 | 35.49 | 52.29 | 21.60 | |
| 401∼600 | 47.07 | 28.45 | 37.60 | 15.66 | |
| 601∼800 | 65.01 | 41.03 | 61.88 | 26.29 | |
| 801∼1000 | 48.90 | 29.13 | 39.99 | 16.47 | |
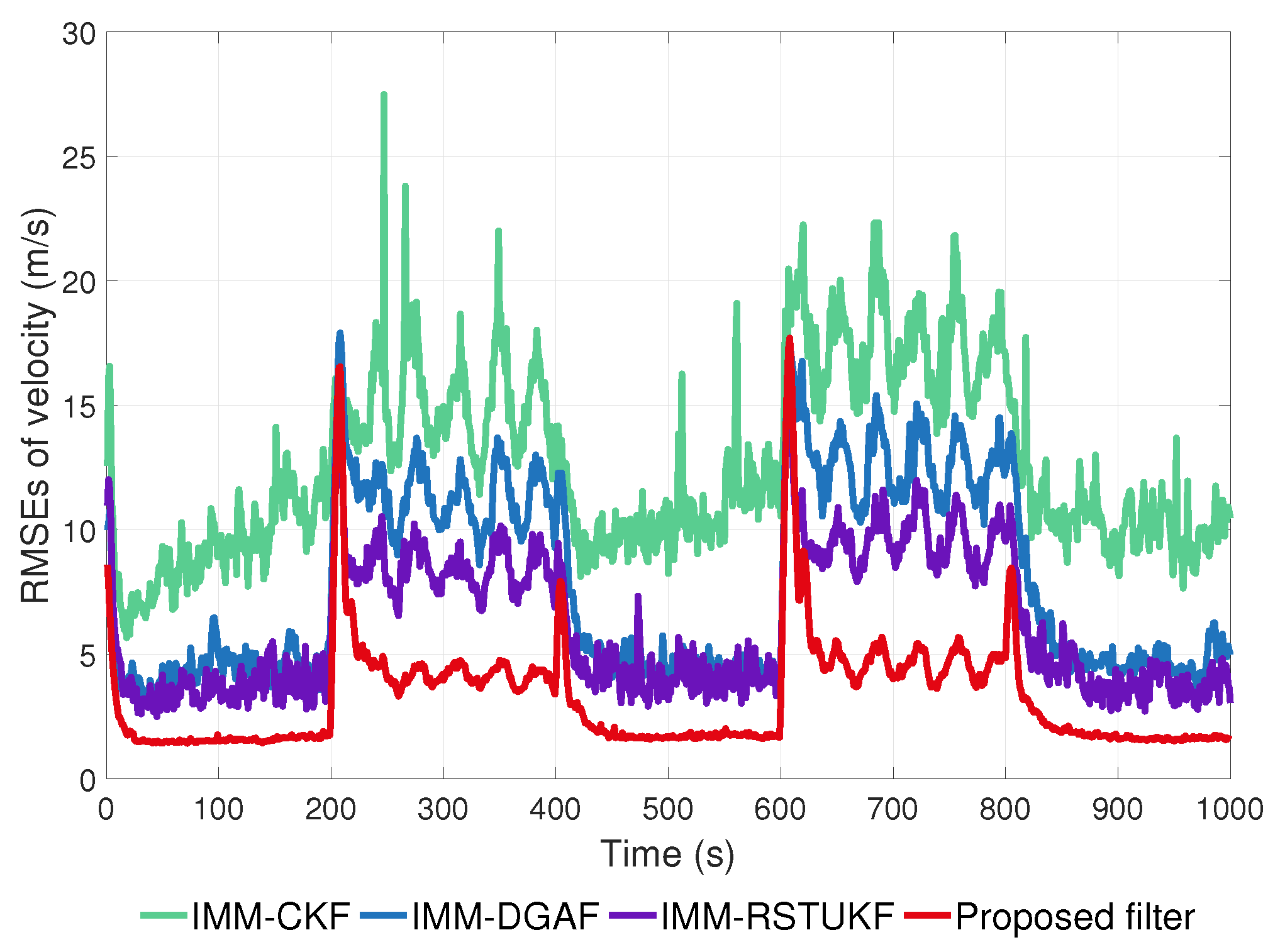
| ARMSE (m/s) | 1∼200 | 10.45 | 3.87 | 4.55 | 1.75 |
| 201∼400 | 16.00 | 8.79 | 11.64 | 4.74 | |
| 401∼600 | 11.65 | 4.37 | 5.28 | 2.06 | |
| 601∼800 | 18.06 | 9.52 | 12.48 | 5.41 | |
| 801∼1000 | 19.84 | 4.39 | 5.51 | 2.14 | |
| ARMSE (deg/s) | 1∼200 | 3.33 | 1.12 | 1.10 | 0.77 |
| 201∼400 | 9.80 | 9.07 | 9.08 | 8.85 | |
| 401∼600 | 3.19 | 1.30 | 1.27 | 0.91 | |
| 601∼800 | 9.73 | 8.91 | 8.94 | 8.71 | |
| 801∼1000 | 6.23 | 1.28 | 1.33 | 0.94 | |
| SSIT (ms) | 1∼1000 | 0.166 | 1.632 | 0.264 | 1.651 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.; Zhou, W.; Gao, L. A Novel Robust IMM Filtering Method for Surface-Maneuvering Target Tracking with Random Measurement Delay. J. Mar. Sci. Eng. 2023, 11, 1047. https://doi.org/10.3390/jmse11051047
Chen C, Zhou W, Gao L. A Novel Robust IMM Filtering Method for Surface-Maneuvering Target Tracking with Random Measurement Delay. Journal of Marine Science and Engineering. 2023; 11(5):1047. https://doi.org/10.3390/jmse11051047
Chicago/Turabian StyleChen, Chen, Weidong Zhou, and Lina Gao. 2023. "A Novel Robust IMM Filtering Method for Surface-Maneuvering Target Tracking with Random Measurement Delay" Journal of Marine Science and Engineering 11, no. 5: 1047. https://doi.org/10.3390/jmse11051047