
Improving the Accuracy of Seafloor Topography Inversion Based on a Variable Density and Topography Constraint Combined Modification Method
Abstract
:1. Introduction
2. Construction of the VDTCCM Method
3. Numerical Experiments and Analysis
3.1. Experimental Data and Pre-Processing
- (1)
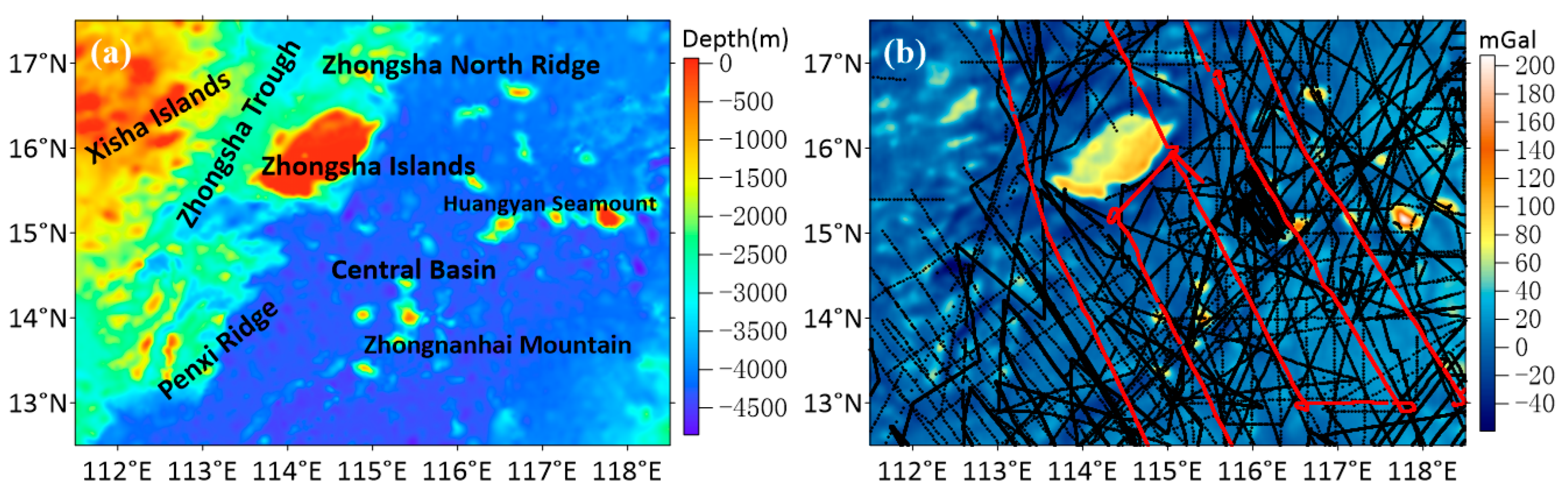
- 105396 shipborne sounding data (SSD) and the ETOPO1 bathymetric model [34] were obtained from the National Geophysical Data Center (NGDC) (Figure 1a). Due to the wide range and time interval of SSD collection and the difference in data processing methods, there are, inevitably, errors. Therefore, we preprocessed the SSD to ensure its quality. Then, we selected the data from track line S049 as the check points to evaluate the accuracy of the inversion seafloor topography model, as shown by the red dots in Figure 1b. The data of the remaining track lines are used as the control points for the inversion of the seafloor topography, and their distribution is shown in the black dots in Figure 1b.
- (2)
- (3)
3.2. Seafloor Topography Inversion Process and Results
3.2.1. Variable Density Model Construction
3.2.2. Seafloor Topography and Gravity Correlation Analysis and Filtering
3.2.3. Seafloor Topographic Inversion Results
3.3. Results and Discussion
4. Conclusions
- (1)
- The traditional methods for estimating the seafloor topography only consider the linear correlation between gravity anomalies and the seafloor topography, and also do not consider the variation of density contrast between the crust and seawater with depth. Therefore, we proposed the variable density and topography constraint combined modification (VDTCCM) method. This method combines Parker’s forward formula and the Bouguer plate formula to recover the topography-related nonlinear terms in the gravity anomaly. Moreover, we considered the effect of density contrast variation and topographic variability on the seafloor topography inversion. Therefore, the accuracy of the model was effectively improved by using the VDTCCM method, which was confirmed by the comparative analysis with the international models ETOPO1 and DTU10 using shipborne sounding check data.
- (2)
- The results of the difference between the crustal density and the seawater density in the study area are influenced by the variation of the seawater depth, and the model of density contrast is more consistent with the variation of the seafloor topography. The relationship between density contrast and seawater depth is an exponential function. In shallow areas, the density difference is large and varies sharply, while in the deep regions, the density difference is relatively small and varies gently. In addition, the results of the frequency domain correlation analysis show that the gravity anomaly in the study area is highly correlated with the seafloor topography in the wavelength range from 25 km to 100 km.
- (3)
- The accuracy evaluation of the seafloor topography model based on shipboard measured data found that the RMSE of the ST1 estimation using the VDTCCM method is 133.73 m, which is about 5.01% better than the accuracy of ST2 inversion using constant density contrast correction. ST1 is about 23.34% and 39.42% better than the international models ETOPO1 and DTU10, respectively. Moreover, the results of a linear regression fitting between the predicted depth of the four models and the real depth of the SSD show that the discrete dots of the ST1 model are more concentrated and have larger correlation coefficients. Thus, it is shown that the seafloor topography corrected with the VDTCCM method is closer to the external SSD, reflecting the superiority of the method.
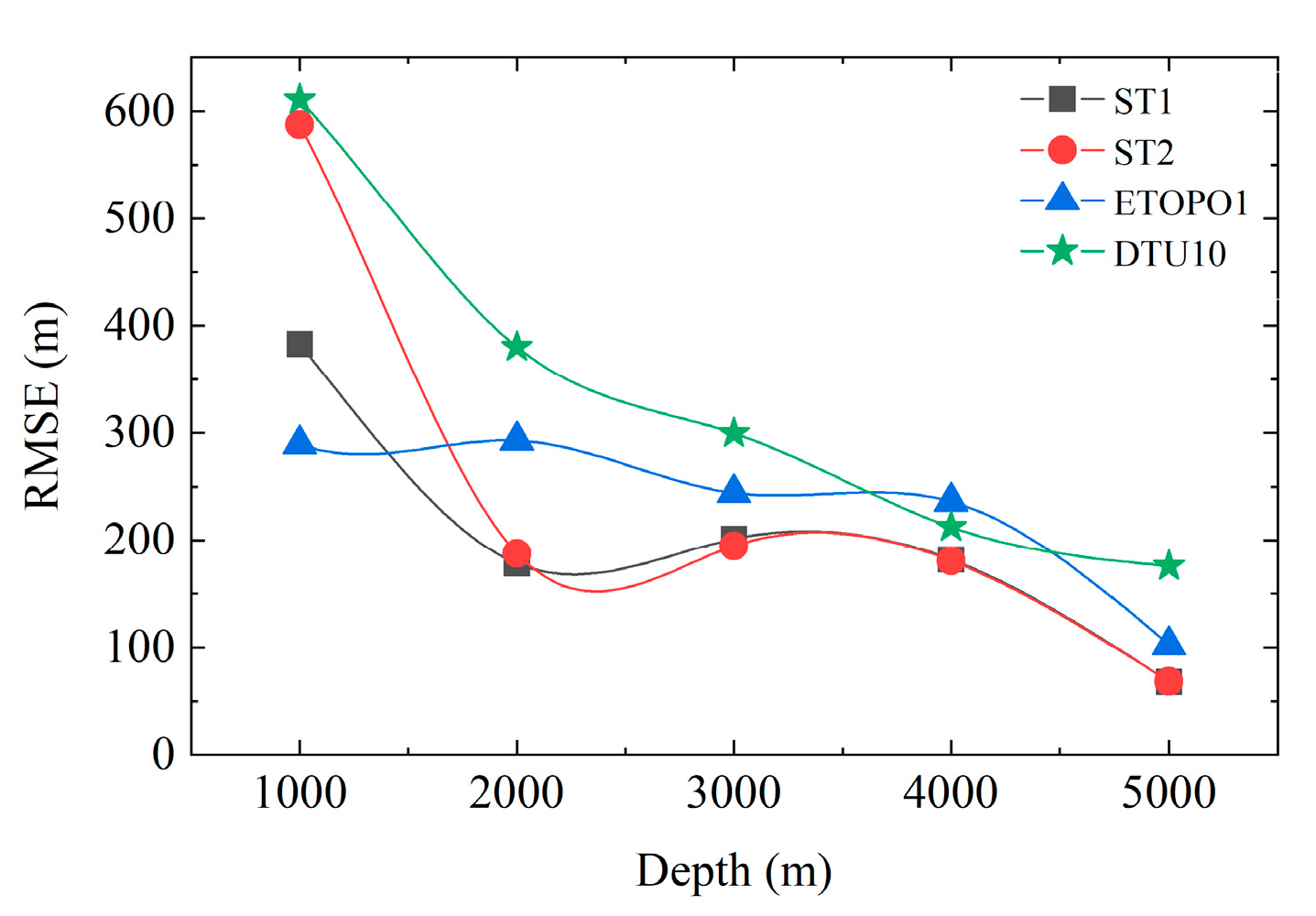
- (4)
- The accuracy of the model is affected by the variation of seawater depth, and the accuracy of the ST1 is significantly better than that of the ST2 in the depth range from 0 to 2000 m. Therefore, it is necessary to consider the density variation of seawater in the middle and shallow areas. From the distribution of the larger error points, the error points of the four models are mainly distributed in the rugged Zhongsha Islands and the areas around the seamounts, while the error points are relatively less distributed in the areas with gentle topographic changes in the Central Basin. Significantly, the ST1 exhibits more topographic details as a result of the power density spectral analysis.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sandwell, D.T.; Smith, W.H.F.; Gille, S.; Kappel, E.; Jayne, S.; Soofi, K.; Coakley, B.; Geli, L. Bathymetry from space: Rationale and requirements for a new, high-resolution altimetric mission. Comptes Rendus Geosci. 2006, 338, 1049–1062. [Google Scholar] [CrossRef]
- Chen, P.Y.; Li, Y.; Su, Y.M.; Chen, X.L.; Jiang, Y.Q. Review of AUV underwater terrain matching navigation. J. Navig. 2015, 68, 1155–1172. [Google Scholar] [CrossRef]
- Zhao, D.N.; Wu, Z.Y.; Zhou, J.Q.; Li, J.B.; Shang, J.H.; Li, S.J. A new method of automatic SVP optimization based on MOV algorithm. Mar. Geod.. 2015, 38, 225–240. [Google Scholar] [CrossRef]
- Klemas, V. Beach profiling and Lidar bathymetry: An overview with case studies. J. Coast Res. 2011, 27, 1019–1028. [Google Scholar] [CrossRef]
- Muzirafuti, A.; Barreca, G.; Crupi, A.; Faina, G.; Paltrinieri, D.; Lanza, S.; Randazzo, G. The contribution of multispectral satellite image to shallow water bathymetry mapping on the coast of Misano Adriatico, Italy. J. Mar. Sci. Eng. 2020, 8, 126. [Google Scholar] [CrossRef]
- Dixon, T.H.; Naraghi, M.; Mcnutt, M.K.; Smith, S.M. Bathymetric prediction from SEASAT altimeter data. J. Geophys. Res. 1983, 88, 1563–1571. [Google Scholar] [CrossRef]
- Li, Z.; Guo, J.Y.; Ji, B.; Wan, X.Y.; Zhang, S.J. A Review of Marine Gravity Field Recovery from Satellite Altimetry. Remote Sens. 2022, 14, 4790. [Google Scholar] [CrossRef]
- Smith, W.H.F.; Sandwell, D.T. Bathymetric prediction from dense satellite altimetry and sparse shipboard bathymetry. J. Geophys. Res. 1994, 99, 21803–21824. [Google Scholar] [CrossRef]
- Parker, R.L. The rapid calculation of potential anomalies. Geophys. J. Int. 1973, 31, 447–455. [Google Scholar] [CrossRef]
- Fan, D.; Li, S.S.; Meng, S.Y.; Zhang, J.H.; Shan, J.C.; Wang, A.M. Applying robust estimation method to estimate seafloor topography in the Sea of Japan. J. Chin. Inert. Tech. 2020, 28, 576–585. [Google Scholar]
- Ibrahim, A.; Hinze, W.J. Mapping buried bedrock topography with gravity. Ground Water 1972, 10, 18–23. [Google Scholar] [CrossRef]
- Kim, J.W.; Frese, R.R.B.; Lee, B.Y.; Roman, D.R.; Doh, S. Altimetry-derived gravity predictions of bathymetry by the Gravity-Geologic Method. Pure Appl. Geophys. 2011, 168, 815–826. [Google Scholar] [CrossRef]
- Xiang, X.S.; Wan, X.Y.; Zhang, R.N.; Li, Y.; Sui, X.H.; Wang, W.B. Bathymetry inversion with the gravity-geologic method: A study of long-wavelength gravity modeling based on adaptive mesh. Mar. Geod. 2017, 40, 329–340. [Google Scholar] [CrossRef]
- Sun, Y.J.; Zheng, W.; Li, Z.W.; Zhou, Z.Q. Improved the accuracy of seafloor topography from altimetry-derived gravity by the topography constraint factor weight optimization method. Remote Sens. 2021, 13, 2277. [Google Scholar] [CrossRef]
- Calmant, S. Seamount topography by least-squares inversion of altimetric geoid heights and shipborne profiles of bathymetry and/or gravity anomalies. Geophys. J. Int. 1994, 119, 428–452. [Google Scholar] [CrossRef]
- Jena, B.; Kurian, P.J.; Swain, D.; Tyagi, A.; Ravindra, R. Prediction of bathymetry from satellite altimeter based gravity in the Arabian Sea: Mapping of two unnamed deep seamounts. Int. J. Appl. Earth Obs. Geoinf. 2012, 16, 1–4. [Google Scholar] [CrossRef]
- Annan, R.F.; Wan, X.Y. Recovering bathymetry of the Gulf of Guinea using altimetry-derived gravity field products combined via convolutional neural network. Surv. Geophys. 2022, 43, 1541–1561. [Google Scholar] [CrossRef]
- Wan, X.Y.; Annan, R.F.; Ziggah, Y.Y. Altimetry-derived gravity gradients using spectral method and their performance in bathymetry inversion using back-progragation neural network. J. Geophys. Res. Solid Earth 2023, 128, e2022JB025785. [Google Scholar] [CrossRef]
- Sun, H.Y.; Feng, Y.K.; Fu, Y.G.; Sun, W.K.; Peng, C.; Zhou, X.H.; Zhou, D.X. Bathymetric prediction using multisource gravity data derived from a parallel linked BP neural network. J. Geophys. Res. Solid Earth 2023, 127, e2022JB024428. [Google Scholar] [CrossRef]
- Fan, D.; Li, S.S.; Meng, S.Y.; Xing, Z.B.; Zhang, C.; Yang, J.J.; Wan, X.Y.; Qu, Z.H. Applying iterative method to solving high-order terms of seafloor topography. Mar. Geod. 2020, 43, 63–85. [Google Scholar] [CrossRef]
- Oldenburg, D.W. The inversion and interpretation of gravity anomalies. Geophysics 1974, 39, 526–536. [Google Scholar] [CrossRef]
- Xu, C.; Li, J.B.; Wu, Y.L. Improved gravity-geologic method and its application to seafloor topography inversion in the South China Sea. Geophys. Inf. Sci. Wuhan Univ. 2022. [Google Scholar] [CrossRef]
- Yu, J.H.; An, B.; Xu, H.; Sun, Z.M.; Tian, Y.W.; Wang, Q.Y. An iterative algorithm for predicting seafloor topography from gravity anomalies. Remote Sens. 2023, 15, 1069. [Google Scholar] [CrossRef]
- Garcia-Adbeslem, J. 2-D inversion of gravity data using sources laterally bounded by continuous surfaces and depth-dependent density. Geophysics 2000, 65, 1128–1141. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, M.H.; Liu, L.; Qiao, J.H.; Liu, S.F. Improved interface inversion based on constrained varying density and its application. Chin. J. Geophys. 2020, 63, 3886–3895. [Google Scholar]
- Silva, J.B.C.; Costa, D.C.L.; Barbosa, V.C.F. Gravity inversion of basement relief and estimation of density contrast variation with depth. Geophysics 2006, 71, J51–J58. [Google Scholar] [CrossRef]
- Chakravarthi, V.; Kumar, P.M.; Ramama, B.; Sastry, S.R. Automatic gravity modeling of sedimentary basins by means of polygonal source geometry and exponential density contrast variation: Two space domain based algorithms. J. Appl. Geophy. 2016, 124, 54–61. [Google Scholar] [CrossRef]
- Brown, W.S. Physical properties of seawater. Springer Handbook of Ocean Engineering; Dhanak, M.R., Xiros, N.I., Eds.; Springer: Berlin/Heidelberg, Germany, 2016; pp. 101–110. [Google Scholar]
- Li, H.L.; Wu, Z.C.; Ji, F. Crustal density structure of the northern South China Sea from constrained 3-D gravity inversion. Chin. J. Geophys. 2020, 36, 1894–1912. [Google Scholar]
- Wu, L.Y. Efficient modelling of gravity effects due to topographic masses using the Gauss–FFT method. Geophys J. Int. 2016, 205, 160–178. [Google Scholar] [CrossRef]
- Marks, K.M.; Smith, W.F. Radially symmetric coherence between satellite gravity and multibeam bathymetry grids. Mar. Geophys. Res. 2012, 33, 223–227. [Google Scholar] [CrossRef]
- Wan, X.Y.; Han, W.P.; Ran, J.J.; Ma, W.J.; Annan, R.F.; Li, B. Seafloor density contrast derived from gravity and shipborne depth observations: A case study in a local area of Atlantic Ocean. Front. Earth Sci. 2021, 9, 668863. [Google Scholar] [CrossRef]
- Qin, X.W.; Zhao, B.; Li, F.Y.; Zhang, B.J.; Wang, H.J.; Zhang, R.W.; He, J.X.; Chen, X. Deep structural research of the South China Sea: Progress and directions. Geol. China 2019, 2, 530–540. [Google Scholar] [CrossRef]
- Amante, C.; Eakins, B.W. ETOPO1 1 Arc-Minute Global Relief Model: Procedures, Data Sources and Analysis; National Geophysical Data Center: Boulder, CO, USA, 2009; pp. 1–25. [Google Scholar]
- Sandwell, D.T.; Garcia, E.; Soofi, K.; Wessel, P.; Chandler, M.; Smith, W.H.F. Toward 1-mGal accuracy in global marine gravity from CryoSat-2, Envisat, and Jason-1. Lead. Edge 2013, 32, 892–899. [Google Scholar] [CrossRef]
- Andersen, O.B.; Knudsen, P. The DNSC08BAT Bathymetry Developed from Satellite Altimetry; EGU-2008 Meeting: Vienna, Austria, 2008. [Google Scholar]
- Laske, G.; Masters, G.; Ma, Z.T.; Pasyanos, M. Update on CRUST1.0—A 1-degree global model of Earth’s crust. In Proceedings of the EGU General Assembly 2013, Vienna, Austria, 7–12 April 2013. [Google Scholar]
- Gladkikh, V.; Tenzer, R. A mathematical model of the global ocean saltwater density distribution. Pure Appl. Geophys. 2011, 169, 249–257. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data | Max | Min | Mean | Median | STD |
|---|---|---|---|---|---|
| Control points of SSD | −23.00 m | −4992.7 m | −3802.68 m | −4117.00 m | 708.77 m |
| Check points of SSD | −364.00 m | −4436.50 m | −3762.05 m | −4102.40 m | 780.62 m |
| Gravity anomaly | 207.38 mGal | 59.50 mGal | 8.04 mGal | 6.31 mGal | 20.49 mGal |
| Model | Max | Min | Mean | Median | STD | RMSE |
|---|---|---|---|---|---|---|
| ST1-SSD | 563.94 | −1124.08 | −13.70 | −8.95 | 133.02 | 133.73 |
| ST2-SSD | 577.75 | −1212.33 | −15.66 | −8.63 | 139.91 | 140.78 |
| ETOPO1-SSD | 1019.13 | −1060.51 | −20.92 | −16.03 | 173.18 | 174.44 |
| DTU10-SSD | 2147.95 | −1996.82 | 58.99 | 69.00 | 212.73 | 220.76 |
| Range | Model | Max | Min | Mean | Median | RMSE |
|---|---|---|---|---|---|---|
| >1000 (183 #) | ST1 | 133.55 | −775.50 | −285.14 | −177.25 | 383.07 |
| ST2 | 49.96 | −976.26 | −549.68 | −497.15 | 587.22 | |
| ETOPO1 | 279.07 | −680.84 | −100.25 | −54.12 | 289.45 | |
| DTU10 | 734.86 | −1996.82 | −109.72 | 154.77 | 610.56 | |
| 1000~2000 (734) | ST1 | 359.97 | −1124.08 | −39.46 | −0.72 | 178.22 |
| ST2 | 342.50 | −1212.33 | −40.09 | 1.75 | 187.69 | |
| ETOPO1 | 522.91 | −1060.51 | −144.10 | −118.99 | 292.74 | |
| DTU10 | 1641.39 | −1503.22 | −70.54 | −22.62 | 380.27 | |
| 2000~3000 (1676) | ST1 | 503.17 | −824.84 | −30.66 | 3.67 | 201.30 |
| ST2 | 528.68 | −766.83 | −25.54 | 4.28 | 194.72 | |
| ETOPO1 | 951.71 | −868.28 | −35.09 | −24.99 | 244.26 | |
| DTU10 | 2147.95 | −933.34 | 1.84 | 7.12 | 299.47 | |
| 3000~4000 (4181) | ST1 | 546.57 | −809.83 | −13.92 | −3.48 | 181.37 |
| ST2 | 555.18 | −840.52 | −13.08 | −3.34 | 180.82 | |
| ETOPO1 | 1019.13 | −837.69 | −39.82 | −16.03 | 236.00 | |
| DTU10 | 1884.64 | −827.49 | 22.37 | 19.52 | 211.14 | |
| >4000 (10241) | ST1 | 563.94 | −355.08 | −4.13 | −10.11 | 68.23 |
| ST2 | 577.75 | −355.84 | −3.80 | −10.01 | 68.48 | |
| ETOPO1 | 999.51 | −411.57 | −0.64 | −14.72 | 102.03 | |
| DTU10 | 694.64 | −348.07 | 95.58 | 96.02 | 175.67 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Y.; Zheng, W.; Li, Z.; Zhou, Z.; Zhou, X. Improving the Accuracy of Seafloor Topography Inversion Based on a Variable Density and Topography Constraint Combined Modification Method. J. Mar. Sci. Eng. 2023, 11, 853. https://doi.org/10.3390/jmse11040853
Sun Y, Zheng W, Li Z, Zhou Z, Zhou X. Improving the Accuracy of Seafloor Topography Inversion Based on a Variable Density and Topography Constraint Combined Modification Method. Journal of Marine Science and Engineering. 2023; 11(4):853. https://doi.org/10.3390/jmse11040853
Chicago/Turabian StyleSun, Yongjin, Wei Zheng, Zhaowei Li, Zhiquan Zhou, and Xiaocong Zhou. 2023. "Improving the Accuracy of Seafloor Topography Inversion Based on a Variable Density and Topography Constraint Combined Modification Method" Journal of Marine Science and Engineering 11, no. 4: 853. https://doi.org/10.3390/jmse11040853