
Evaluation by a Quantitative Index about Intact Stability Performance in Waves of a Set of Megayacht Units


Abstract
:1. Introduction
2. Intact Stability in Waves
2.1. First Generation Intact Stability Criteria
2.2. Second Generation Intact Stability Criteria
- –
- restoring arm variation due to wave profile;
- –
- maneuvering-related phenomena;
- –
- dead ship condition.
2.2.1. First Vulnerability Criteria—Lv1
2.2.2. Second Vulnerability Criteria—Lv2
3. Assessment of the Intact Stability Performance
The Intact Stability in Waves Index
4. Application Case
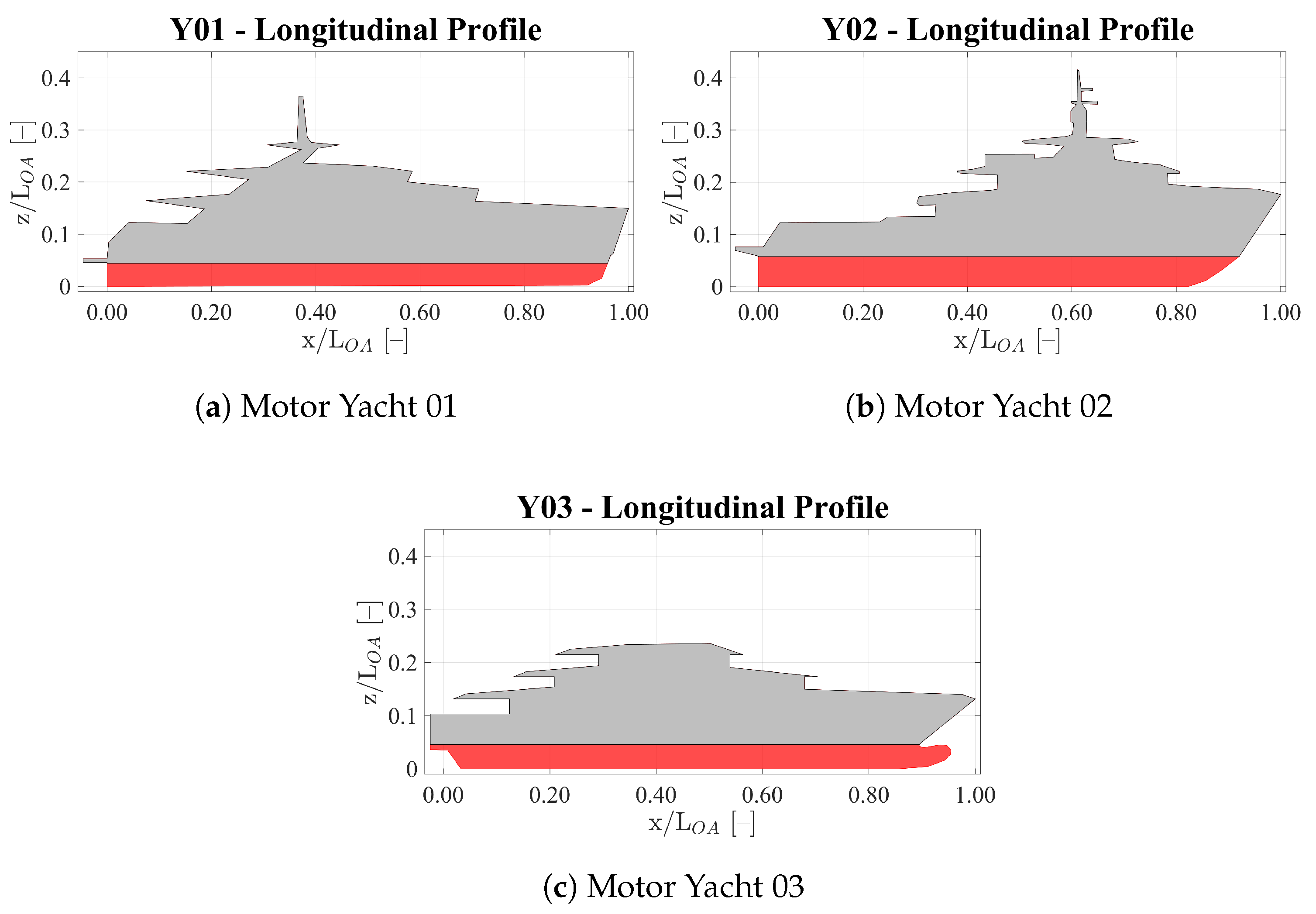
Investigated Units
5. Results
5.1. Stability in Waves Calculation
5.2. Calculation of the Intact Stability in Waves Index
5.3. The Impact of the Environmental Conditions on the ISWI
6. Conclusions
- –
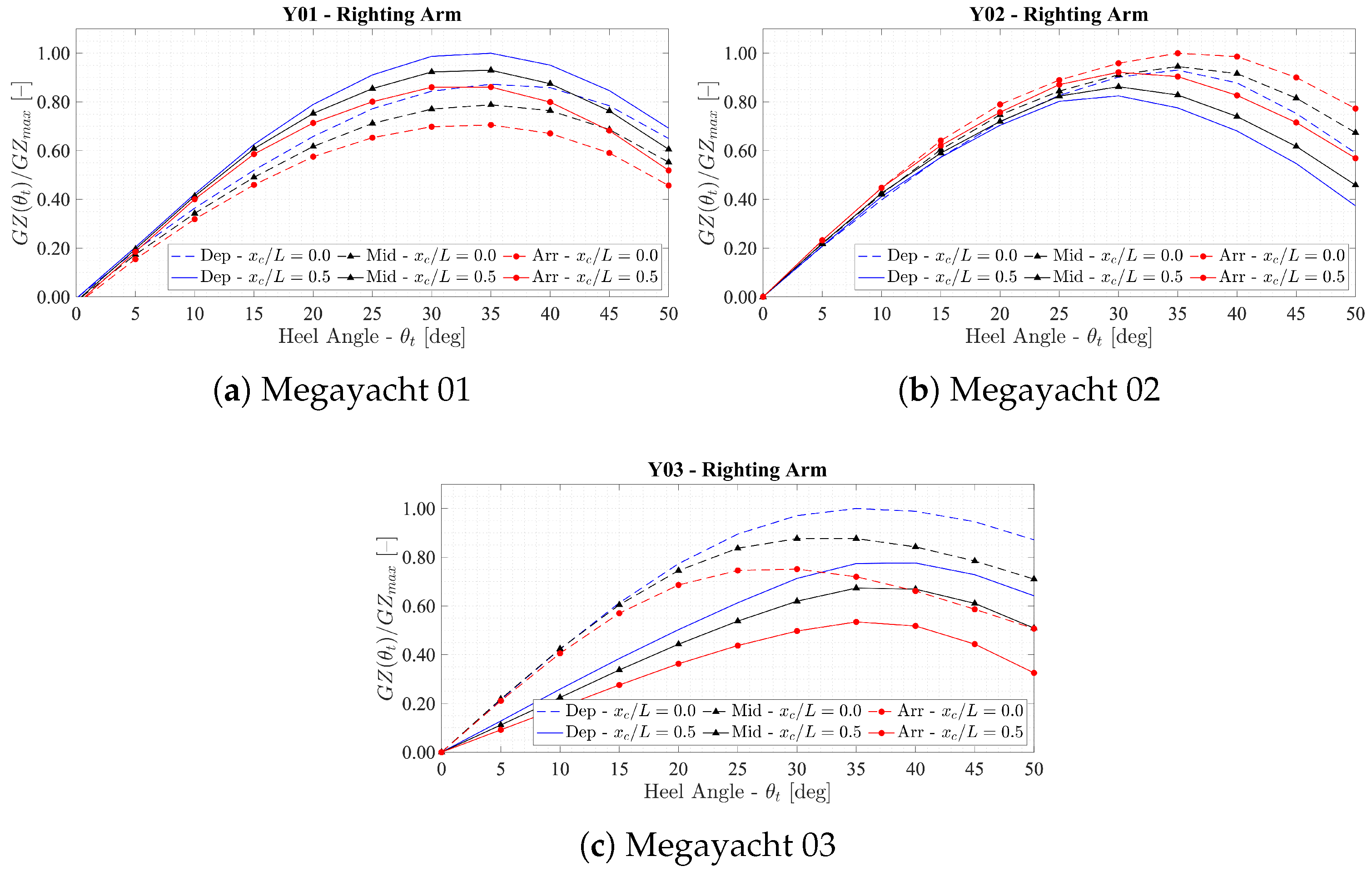
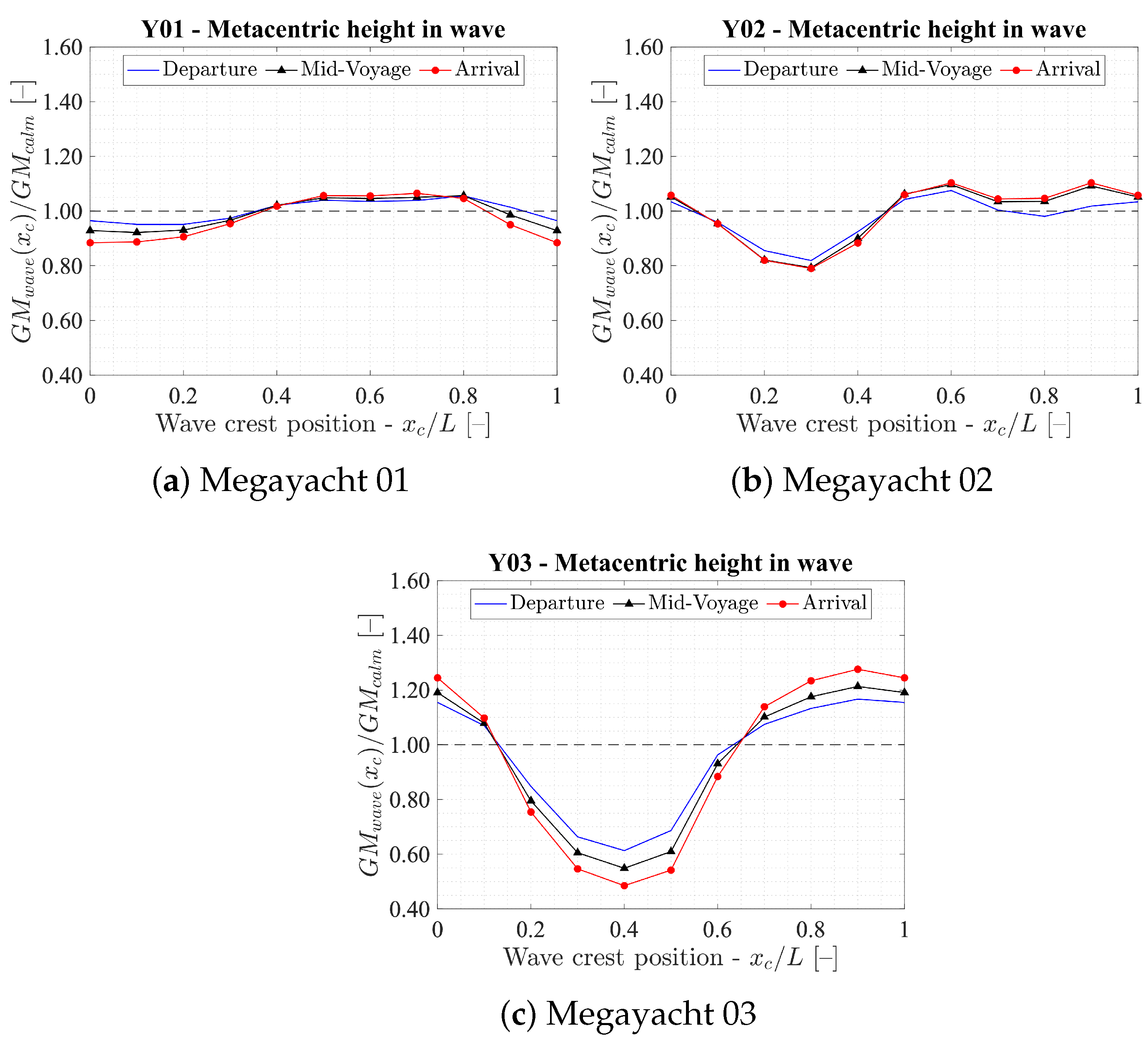
- As a first analysis, the effects on the righting moment and on the metacentric height of the wave passages have been studied. It appears that Y01 has a different behavior to the other units, in terms of the investigated stability parameters. This trend is ascribed to the typical planning hull shape and to the presence of spray rails. In turn, all other units are semi-displacement hull, with a classic round bilge hull.
- –
- The outcomes provided by the SGISc application, show that Y01 seems to be the worst unit in terms of stability in waves performance. This can be attributed to it having the smallest size and to its vertical position of the CoG. In fact, Y01 presents the highest value of the dimensionless ratios and , compared to the other units. These results are well reflected in the ISWI application.
- –
- The outcomes show that the change in geographical area negatively affects the Lv1 criteria, resulting in larger related criteria for all vessels. On the contrary, Lv2 criteria assume an undefined trend, which in some cases results in an improved performance.
- –
- The application of the ISWI results in consistent outcomes, reflecting well the changes in stability in waves criteria due to the chosen operational restriction related to the geographical area, i.e., the central Mediterranean Sea. The results of the ISWI reflect well the behavior of the SGISc, resulting in a consistent assessment of the intact stability in waves performance.
- –
- It is deemed that the definition of an exhaustive index for each loading condition, will positively affect the assessment of operative aspects by the master during navigation. In fact, the availability of a stability index related also to the environmental conditions, may be a valuable support to the decision making process in the routing operations.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations and Symbols
| Metacentric height variation in waves, [m]; | |
| Ship displacement, [t]; | |
| Immersed volume at a draft equal to D, [m]; | |
| ∇ | Immersed volume at a draft d, [m]; |
| Heel angle due to the steady wind action in the weather criterion, [deg]; | |
| Angle of side-deck immersion, [deg]; | |
| Characteristic roll amplitude, [-]; | |
| Waterplane area at a draft equal to d, [m]; | |
| a | Weather criterion left-side area below the righting arm, [m·rad]; |
| b | Weather criterion right-side area below the righting arm, [m·rad]; |
| B | Ship breadth, [m]; |
| Lv1 criterion on the hull shape, [-]; | |
| Lv1 criterion of dead ship condition on the underlined GZ area, [-]; | |
| Lv1 criterion of dead ship condition on the heeling angle , [deg]; | |
| Lv2 criterion of dead ship condition, [-]; | |
| Lv1 criterion of excessive acceleration, [-]; | |
| Lv2 criterion of excessive acceleration, [-]; | |
| Generic long-term criterion, [-]; | |
| Lv1 criterion of pure loss of stability, [-]; | |
| Lv2 criterion of pure loss of stability, [-]; | |
| Lv1 criterion of parametric roll, [-]; | |
| Lv2 criterion of parametric rolling on the righting arm variations in waves, [-]; | |
| Lv2 criterion of parametric rolling on the dynamic roll response, [-]; | |
| Lv2 criterion of surf-riding, [-]; | |
| Generic short-term criterion, [-]; | |
| Minimum value achievable by the considered criterion; | |
| Value of the considered criterion; | |
| Draft passing through the wave crest, [m]; | |
| Draft passing through the wave trough, [m]; | |
| D | Ship depth, [m]; |
| d | Ship draft, [m]; |
| Froude number, [-]; | |
| g | Gravity acceleration, [m·s]; |
| Minimum metacentric height in waves, [m]; | |
| Metacentric height in calm water, [m]; | |
| Righting arm in calm water, [m]; | |
| Vertical position above the roll axis where crew and passengers | |
| may be present, [m]; | |
| Coupling factor taking into account the simultaneous action | |
| of pitch, roll, and yaw, [-]; | |
| k | Weighting factor in the ISWI, [-]; |
| Overall ship length, [m]; | |
| L | Ship length according to IS code, [m]; |
| Partial index constituting the ISWI, [-]; | |
| Standard threshold for the Lv1 PR, [-]; | |
| R | Generic standard threshold for Lv2, [-]; |
| Wave steepness, [-]; | |
| Standard threshold of the considered criterion; | |
| Ship natural roll period, [s]; | |
| Ship service speed, [m·s]; | |
| Sea state weighting factor, [-]; | |
| CoG | Center of gravity; |
| DS | Dead ship condition stability failure mode; |
| DSA | Direct stability assessment; |
| EA | Excessive acceleration stability failure mode; |
| IMO | International maritime organization; |
| IS code | Intact stability code; |
| ISWI | Intact stability in waves index; |
| Lv1 | First vulnerability level; |
| Lv2 | Second vulnerability level; |
| MSC | Maritime safety committee of IMO; |
| OG | Operational guidance; |
| OL | Operational limitations; |
| OM | Operational measures; |
| PL | Pure loss of stability stability failure mode; |
| PR | Parametric roll stability failure mode; |
| RAO | Response amplitude operator; |
| SDC | Ship design and construction sub-committee of IMO; |
| SGISc | Second generation intact stability criteria; |
| SR | Surf-riding stability failure mode. |
References
- Miguez González, M.; Díaz Casás, V.; Caamaño Santiago, L. Real-time stability assessment in mid-sized fishing vessels. In Proceedings of the 15th International Ship Stability Workshop, Stockholm, Sweden, 13–15 June 2016; pp. 201–208. [Google Scholar]
- Wolfson Unit. HSC–Evaluation of Existing Criteria; Mca Research Project 509: Final Report; Wolfson Unit: Southampton, UK, 2005. [Google Scholar]
- Wolfson Unit. Simplified Presentation of Fishing Vessels Stability Information for Vessels 12 M Registered Length and over; Mca Research Project 560: Final Report; Wolfson Unit: Southampton, UK, 2006. [Google Scholar]
- Miguez González, M.; Caamaño Sobrino, P.; Tédin Álvarez, R.; Díaz Casás, V.; Mártinez Lopez, A.; López Peña, F. Fishing vessel stability assessment system. Ocean Eng. 2012, 41, 67–78. [Google Scholar] [CrossRef]
- Im, N.K.; Hwang, S.J.; Choe, H. Development of Stability Index for Vessel Operators Support System. J. Korean Soc. Mar. Environ. Saf. 2018, 24, 1–9. [Google Scholar] [CrossRef]
- IMCO. Recommendation on Intact Stability for Passenger and Cargo Ships under 100 Metres in Length; Resolution A.167(AS.IV); Inter-Governmental Maritime Consultative Organization: London, UK, 1968. [Google Scholar]
- IMCO. Recommendation on Intact Stability of Fishing Vessels; Resolution A.168(ES.IV); Inter-Governmental Maritime Consultative Organization: London, UK, 1968. [Google Scholar]
- Rahola, J. The Judging of the Stability of Ships and the Determination of the Minimum Amount of Stability Especially Considering the Vessels Navigating Finnish Waters. Ph.D. Thesis, Technical University of Finland, Helsinki, Finland, 1939. [Google Scholar]
- IMO. Recommendation on a Severe Wind and Rolling Criterion (Weather Criterion) for the Intact Stability of Passenger and Cargo Ships of 24 Metres in Length and Over; Resolution A.562(14); International Maritime Organization: London, UK, 1982. [Google Scholar]
- IMO. Adoption of the International code on Intact Stability; Resolution MSC.267(85); International Maritime Organization: London, UK, 2008. [Google Scholar]
- Francescutto, A. Intact stability criteria of ships—Past, present and future. Ocean Eng. 2016, 120, 312–317. [Google Scholar] [CrossRef]
- Kobyliński, L. Stability Criteria—Present status and perspectives of improvement. Int. J. Mar. Navig. Saf. Sea Transp. 2014, 8, 281–286. [Google Scholar] [CrossRef] [Green Version]
- Belenky, V.; Bassler, C.; Spyrou, K. Development of Second Generation Intact Stability Criteria; Hydromechanics Department Report; Naval Warfare Center Carderock Division: Carderock, MA, USA, 2011. [Google Scholar]
- Paulling, J. Parametric Rolling of Ships—Then and Nows. In Contemporary Ideas on Ship Stability and Capsizing in Wave; Neves, M., Belenky, V., de Kat, J., Spyrou, K., Umeda, N., Eds.; Springer: Dordrecht, The Netherlands, 2011; Volume 93. [Google Scholar]
- U.S. Coast Guard. Continued Development of Second Generation Intact Stability Criteria; Naval Architecture Division Report; U.S. Coast Guard Office of Design and Engineering Standards: Washington, DC, USA, 2019.
- IMO. Interim Guidelines on the Second Generation Intact Stability Criteria; Circular MSC.1/1627; International Maritime Organization: London, UK, 2020. [Google Scholar]
- Shin, D.; Chung, J. Application of dead ship condition based on IMO second-generation intact stability criteria for 13K oil chemical tanker. Ocean Eng. 2021, 238, 109776. [Google Scholar] [CrossRef]
- Szodza, S.; Krata, P. Towards Evaluation of the Second Generation Intact Stability Criteria—Examination of a Fishing Vessel Vulnerability to Surf-Riding, Based on Historical Capsizing. Ocean Eng. 2022, 248, 110796. [Google Scholar] [CrossRef]
- Petacco, N.; Vernengo, G.; Villa, D.; Coppedé, A.; Gualeni, P. Influence of Systematic Hull Shape Variations on Ship Stability Performances in Waves. J. Ship Res. 2021, 65, 243–256. [Google Scholar] [CrossRef]
- Gualeni, P.; Paolobello, D.; Petacco, N.; Lena, C. Seakeeping time domain simulations for surf-riding/broaching: Investigations toward a direct stability assessment. J. Mar. Sci. Technol. 2020, 25, 1120–1128. [Google Scholar] [CrossRef]
- Shigunov, V.; Themelis, N.; Spyrou, K. Critical Wave Groups Versus Direct Monte-Carlo Simulations for Typical Stability Failure Modes of a Container Ship. In Contemporary Ideas on Ship Stability; Springer: Cham, Switzerland, 2019; Volume 119, pp. 407–421. [Google Scholar]
- Spyrou, K.J.; Weems, K.M.; Belenky, V. Patterns of Surf-Riding and Broaching-to Captured by Advanced Hydrodynamic Modelling. In Proceedings of the 10th International Conference on Stability of Ships and Ocean Vehicles, Glasgow, UK, 7–11 June 2009; pp. 331–345. [Google Scholar]
- Yang, S. Study on the Parametric Rolling of Medium-Sized Containership Based on Nonlinear Time Domain Analysis. In Proceedings of the 39th International conference on Offshore Mechanics and Arctic Engineering (ASME), Online, 3–7 August 2020; Volume 6b. [Google Scholar]
- Bačkalov, I.; Bulian, G.; Rosén, A.; Shigunov, V.; Themelis, N. Improvement of ship stability and safety in intact condition through operational measures: Challenges and opportunities. Ocean Eng. 2016, 120, 353–361. [Google Scholar] [CrossRef]
- Liwång, H. Exposure, vulnerability and recoverability in relation to a ship’s intact stability. Ocean Eng. 2019, 187, 106218. [Google Scholar] [CrossRef]
- Shigunov, V.; Themelis, N.; Bačkalov, I.; Begović, E.; Eliopoulou, E.; Hasimoto, H.; Hinz, T.; McCue, L.; Míguez González, M.; Rodríguez, C.A. Operational measures for intact ship stability. In Proceedings of the 1st International Conference on the Stability and Safety of Ships and Ocean Vehicles, Online, 7–11 June 2021. [Google Scholar]
- Tompuri, M.; Ruponen, P.; Lindroth, D. Second generation intact stability criteria and operational limitations in initial ship design. In Proceedings of the 13th International Symposium on Practical Design of Ships and Other Floating Structures—PRADS2016, Copenhagen, Denmark, 4–8 September 2016. [Google Scholar]
- Rudaković, S.; Bačkalov, I. Operational limitations of a river-sea container vessel in the framework of the Second Generation Intact Stability Criteria. Ocean Eng. 2019, 183, 409–418. [Google Scholar] [CrossRef]
- Begović, E.; Boccadamo, G.; Rosano, G.; Rinauro, B. Excessive acceleration simplified Operational Guidance. Int. J. Nav. Archit. Ocean. Eng. 2022, 14, 100473. [Google Scholar] [CrossRef]
- Bulian, G.; Orlandi, A. Effect of environmental data uncertainty in the framework of second generation intact stability criteria. Ocean Eng. 2022, 253, 111253. [Google Scholar] [CrossRef]
- Begović, E.; Bertorello, C.; Rinauro, B.; Rosano, G. Simplified operational guidance for second generation intact stability criteria. Ocean Eng. 2023, 270, 113583. [Google Scholar] [CrossRef]
- Petacco, N. An alternative methodology for the simplified operational guidance in the framework of second generation intact stability criteria. Ocean Eng. 2022, 266, 112665. [Google Scholar] [CrossRef]
- IMO. Interim Guidelines for Alternative Assessment of the Weather Criterion; Circular MSC.1/1200; International Maritime Organization: London, UK, 2006. [Google Scholar]
- Petacco, N.; Gualeni, P. Second Generation Intact Stability criteria for mega-yachts: Application and design consideration. In Maritime Technology and Engineering III, Proceedings of the 3rd International Conference on Maritime Technology and Engineering, MARTECH 2016, Lisbon, Portugal, 4–6 July 2016; Guedes Soares, G., Santos, T., Eds.; CRC Press/Balkema: Lisbon, Portugal, 2016; pp. 673–682. [Google Scholar] [CrossRef]
- Petacco, N.; Pitardi, D.; Podenzana Bonvino, C.; Gualeni, P. Application of the IMO Second Generation Intact Stability criteria to a Ballast Free Containership. J. Mar. Sci. Eng. 2021, 9, 17. [Google Scholar] [CrossRef]
- Shin, D.M.; Moon, B.Y.; Chung, J. Application of surf-riding and broaching mode based on IMO second- generation intact stability criteria for previous ships. Int. J. Nav. Archit. Ocean. Eng. 2021, 13, 545–553. [Google Scholar] [CrossRef]
- Shin, D.M.; Moon, B.Y. Assessment of Excessive Acceleration of the IMO Second Generation Intact Stability Criteria for the Tanker. J. Mar. Sci. Eng. 2022, 10, 229. [Google Scholar] [CrossRef]
- Im, N.K.; Choe, H. A quantitative methodology for evaluating the ship stability using the index for marine ship intact stability assessment model. Int. J. Nav. Archit. Ocean. Eng. 2021, 13, 246–259. [Google Scholar] [CrossRef]
- International Maritime Organization. SDC 1/INF.8—Information Collected by the Correspondence Group on Intact Stability; Submitted by Japan; International Maritime Organization: London, UK, 2013. [Google Scholar]
- Petacco, N.; Gualeni, P.; Stio, G. Second Generation Intact Stability criteria: Application of operational limitations & guidance to a megayacht unit. In Developments in Maritime Technology and Engineering: Celebrating 40 Years of Teaching in Naval Architecture and Ocean Engineering in Portugal and the 25th Anniversary of CENTEC, 1st ed.; Guedes Soares, G., Santos, T., Eds.; CRC Press: Lisbon, Portugal, 2021; Chapter 40; pp. 357–363. [Google Scholar] [CrossRef]
- Angelou, M.; Spyrou, K. Dynamic stability assessment of yacht downwind sailing in regular waves. Appl. Ocean. Res. 2021, 111, 102651. [Google Scholar] [CrossRef]
- International Association of Classification Society. Standard Wave Data; Recommendation n.34–Rev.1 34; International Association of Classification Society: London, UK, 2001. [Google Scholar]
- Petacco, N.; Gualeni, P. IMO Second Generation Intact Stability criteria: General overview and focus on Operational Measures. J. Mar. Sci. Eng. 2020, 8, 494. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Criterion | Standard | Criterion | Standard | ||
|---|---|---|---|---|---|
| ≥ | 1.00 | ≤ | 0.06 | ||
| ≤ | ≤ | ||||
| ≤ | ≤ | 0.06 | |||
| ≥ | 0.05 m | ≤ | 0.06 | ||
| ≤ | R | ≤ | 0.025 | ||
| ≤ | 0.005 |
| Main Dimensions | |||||
|---|---|---|---|---|---|
| Unit | Y01 | Y02 | Y03 | ||
| Overall length | 44.70 | 47.00 | 74.40 | ||
| Maximum breadth | B | 8.60 | 9.00 | 13.2 | |
| Depth | D | 4.30 | 4.80 | 7.00 | |
| Service speed | 20.0 | 13.0 | 17.5 | ||
| Displacement | 348 | 485 | 1630 | ||
| Transverse metacentric height | 1.43 | 0.82 | 1.91 | ||
| KG/D | 0.784 | 0.773 | 0.733 | ||
| KG/d | 1.762 | 1.433 | 1.666 | ||
| Level 1 | Loading Conditions | Level 2 | Loading Conditions | |||||
|---|---|---|---|---|---|---|---|---|
| Criterion | Arrival | Mid-Voyage | Departure | Criterion | Arrival | Mid-Voyage | Departure | |
| 0.966 | 1.393 | 7.986 | 0.790 | 0.745 | 0.655 | |||
| 8.560 | 7.830 | 7.140 | 2.27 × 10 | 2.43 × 10 | 2.20 × 10 | |||
| 6.226 | 5.957 | 7.813 | 0.305 | 0.004 | 0.000 | |||
| 0.409 | 0.543 | 0.183 | 0.115 | 0.000 | 0.000 | |||
| 0.206 | 0.183 | 0.192 | 3.77 × 10 | 3.67 × 10 | 7.24 × 10 | |||
| 0.104 | 0.104 | 0.104 | ||||||
| Level 1 | Loading Conditions | Level 2 | Loading Conditions | |||||
|---|---|---|---|---|---|---|---|---|
| Criterion | Arrival | Mid-Voyage | Departure | Criterion | Arrival | Mid-Voyage | Departure | |
| 0.769 | 0.675 | 0.704 | 0.392 | 0.405 | 0.400 | |||
| 8.45 | 8.73 | 8.78 | 5.86 × 10 | 3.79 × 10 | 2.11 × 10 | |||
| 6.226 | 5.957 | 5.686 | 0.009 | 0.013 | 0.029 | |||
| −0.041 | −0.044 | 0.082 | 0.000 | 0.000 | 0.000 | |||
| 0.479 | 0.490 | 0.475 | 0.000 | 0.000 | 0.000 | |||
| 0.0079 | 0.0076 | 0.0078 | ||||||
| Level 1 | Loading Conditions | Level 2 | Loading Conditions | |||||
|---|---|---|---|---|---|---|---|---|
| Criterion | Arrival | Mid-Voyage | Departure | Criterion | Arrival | Mid-Voyage | Departure | |
| 0.445 | 0.441 | 0.436 | 0.213 | 0.183 | 0.161 | |||
| 5.74 | 4.89 | 4.33 | 2.01 × 10 | 4.70 × 10 | 7.91 × 10 | |||
| 7.042 | 7.379 | 7.470 | 0.07 | 0.033 | 0.013 | |||
| −0.440 | −0.116 | 0.176 | 0.000 | 0.000 | 0.000 | |||
| 0.506 | 0.408 | 0.299 | 0.012 | 0.007 | 0.008 | |||
| 0.0329 | 0.0320 | 0.0455 | ||||||
| Partial Index for Y01 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Loading Condition | |||||||||||
| Arrival | 1.034 | 0.535 | 1.260 | −6.180 | 0.110 | 13.167 | 58.205 | 5.083 | 1.917 | 0.015 | 20.800 |
| Mid-Voyage | 0.607 | 0.489 | 1.206 | −8.860 | 0.098 | 12.417 | 62.308 | 0.067 | 0.000 | 0.001 | 20.800 |
| Departure | −5.986 | 0.446 | 1.582 | −1.660 | 0.103 | 10.917 | 56.410 | 0.000 | 0.000 | 0.000 | 20.800 |
| Partial Index for Y02 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Loading Condition | |||||||||||
| Arrival | 1.231 | 0.528 | 1.260 | 2.820 | 0.900 | 6.533 | 1.503 | 0.150 | 0.000 | 0.000 | 1.580 |
| Mid-Voyage | 1.325 | 0.546 | 1.206 | 2.880 | 0.917 | 6.750 | 0.972 | 0.217 | 0.000 | 0.000 | 1.520 |
| Departure | 1.296 | 0.549 | 1.151 | 0.360 | 0.855 | 6.667 | 0.541 | 0.483 | 0.000 | 0.000 | 1.560 |
| Partial Index for Y03 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Loading Condition | |||||||||||
| Arrival | 1.555 | 0.359 | 1.426 | 10.800 | 1.378 | 3.550 | 0.515 | 1.167 | 0.000 | 0.480 | 6.580 |
| Mid-Voyage | 1.559 | 0.306 | 1.494 | 4.320 | 1.111 | 3.050 | 1.205 | 0.550 | 0.000 | 0.280 | 6.400 |
| Departure | 1.564 | 0.271 | 1.512 | −1.520 | 0.814 | 2.683 | 2.028 | 0.217 | 0.000 | 0.320 | 9.100 |
| ISWI—Intact Stability in Waves Index | |||
|---|---|---|---|
| Unit | Arrival | Mid-Voyage | Departure |
| Y01 | 11.4748 | 10.8662 | 10.0435 |
| Y02 | 1.5453 | 1.5171 | 1.3361 |
| Y03 | 2.3589 | 1.8682 | 1.8434 |
| Level 1 | Loading Conditions | Level 2 | Loading Conditions | |||||
|---|---|---|---|---|---|---|---|---|
| Criterion | Arrival | Mid-Voyage | Departure | Criterion | Arrival | Mid-Voyage | Departure | |
| 0.966 | 1.393 | 7.986 | 0.652 | 0.635 | 0.581 | |||
| 8.56 | 7.83 | 7.14 | 2.69 × 10 | 2.89 × 10 | 2.72 × 10 | |||
| 6.226 | 5.957 | 7.813 | 0.282 | 0.116 | 0.076 | |||
| −2.152 | −2.021 | −1.867 | 0.899 | 0.027 | 0.000 | |||
| 0.973 | 0.875 | 0.717 | 1.50 × 10 | 5.51 × 10 | 2.12 × 10 | |||
| 0.0991 | 0.0993 | 0.0991 | ||||||
| Level 1 | Loading Conditions | Level 2 | Loading Conditions | |||||
|---|---|---|---|---|---|---|---|---|
| Criterion | Arrival | Mid-Voyage | Departure | Criterion | Arrival | Mid-Voyage | Departure | |
| 0.769 | 0.675 | 0.704 | 0.218 | 0.208 | 0.205 | |||
| 8.45 | 8.73 | 8.78 | 5.00 × 10 | 2.63 × 10 | 1.12 × 10 | |||
| 6.226 | 5.957 | 5.686 | 0.028 | 0.038 | 0.076 | |||
| −1.762 | −1.786 | −1.767 | 0.000 | 0.000 | 0.000 | |||
| 1.058 | 1.088 | 1.001 | 0.000 | 0.000 | 0.000 | |||
| 0.0179 | 0.0177 | 0.0208 | ||||||
| Level 1 | Loading Conditions | Level 2 | Loading Conditions | |||||
|---|---|---|---|---|---|---|---|---|
| Criterion | Arrival | Mid-Voyage | Departure | Criterion | Arrival | Mid-Voyage | Departure | |
| 0.445 | 0.441 | 0.436 | 0.087 | 0.087 | 0.083 | |||
| 5.74 | 4.89 | 4.33 | 2.27 × 10 | 2.43 × 10 | 2.20 × 10 | |||
| 7.042 | 7.379 | 7.470 | 0.041 | 0.031 | 0.024 | |||
| −2.491 | −2.2170 | 1.963 | 0.000 | 0.000 | 0.000 | |||
| 1.149 | 0.971 | 0.820 | 7.70 × 10 | 5.00 × 10 | 5.40 × 10 | |||
| 0.0204 | 0.0200 | 0.0245 | ||||||
| ISWI—Intact Stability in Waves Index | |||
|---|---|---|---|
| Unit | Arrival | Mid-Voyage | Departure |
| Y01 | 16.8940 | 15.2407 | 13.9300 |
| Y02 | 3.5394 | 3.4977 | 3.5529 |
| Y03 | 11.0437 | 11.1348 | 10.2035 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Petacco, N.; Gualeni, P. Evaluation by a Quantitative Index about Intact Stability Performance in Waves of a Set of Megayacht Units. J. Mar. Sci. Eng. 2023, 11, 814. https://doi.org/10.3390/jmse11040814
Petacco N, Gualeni P. Evaluation by a Quantitative Index about Intact Stability Performance in Waves of a Set of Megayacht Units. Journal of Marine Science and Engineering. 2023; 11(4):814. https://doi.org/10.3390/jmse11040814
Chicago/Turabian StylePetacco, Nicola, and Paola Gualeni. 2023. "Evaluation by a Quantitative Index about Intact Stability Performance in Waves of a Set of Megayacht Units" Journal of Marine Science and Engineering 11, no. 4: 814. https://doi.org/10.3390/jmse11040814