
A Coupled Hydrodynamic–Structural Model for Flexible Interconnected Multiple Floating Bodies

Abstract
:1. Introduction
2. Materials and Methods
2.1. Frequency-Domain Model
2.2. Coupled Time-Domain Model
3. Discussion of the Development of CPHSTDM and Parametric Study on Connector Parameters
3.1. Particulars of the Analyzed Model
3.2. Frequency-Domain Simulations of the Interconnected Three-Module System
3.3. Discussion of the Development of CPHSTDM and Parametric Study on Connector Parameters
4. Concluding Remarks
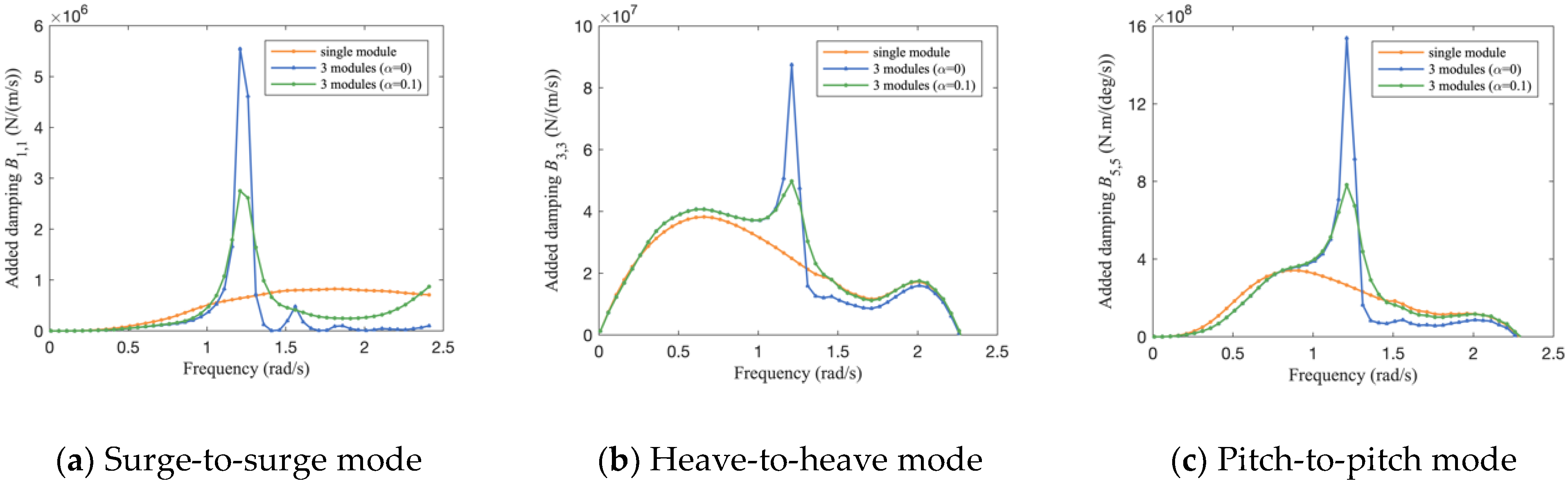
- The effects of hydrodynamic interactions in the multi-module floating system play a crucial role in the response of the system and directly affect the feasibility of the numerical model calculation, especially when transforming the frequency-domain results into the time domain. When the distorted hydrodynamic interaction results in potential theory are corrected, it would lead to stable time-domain results.
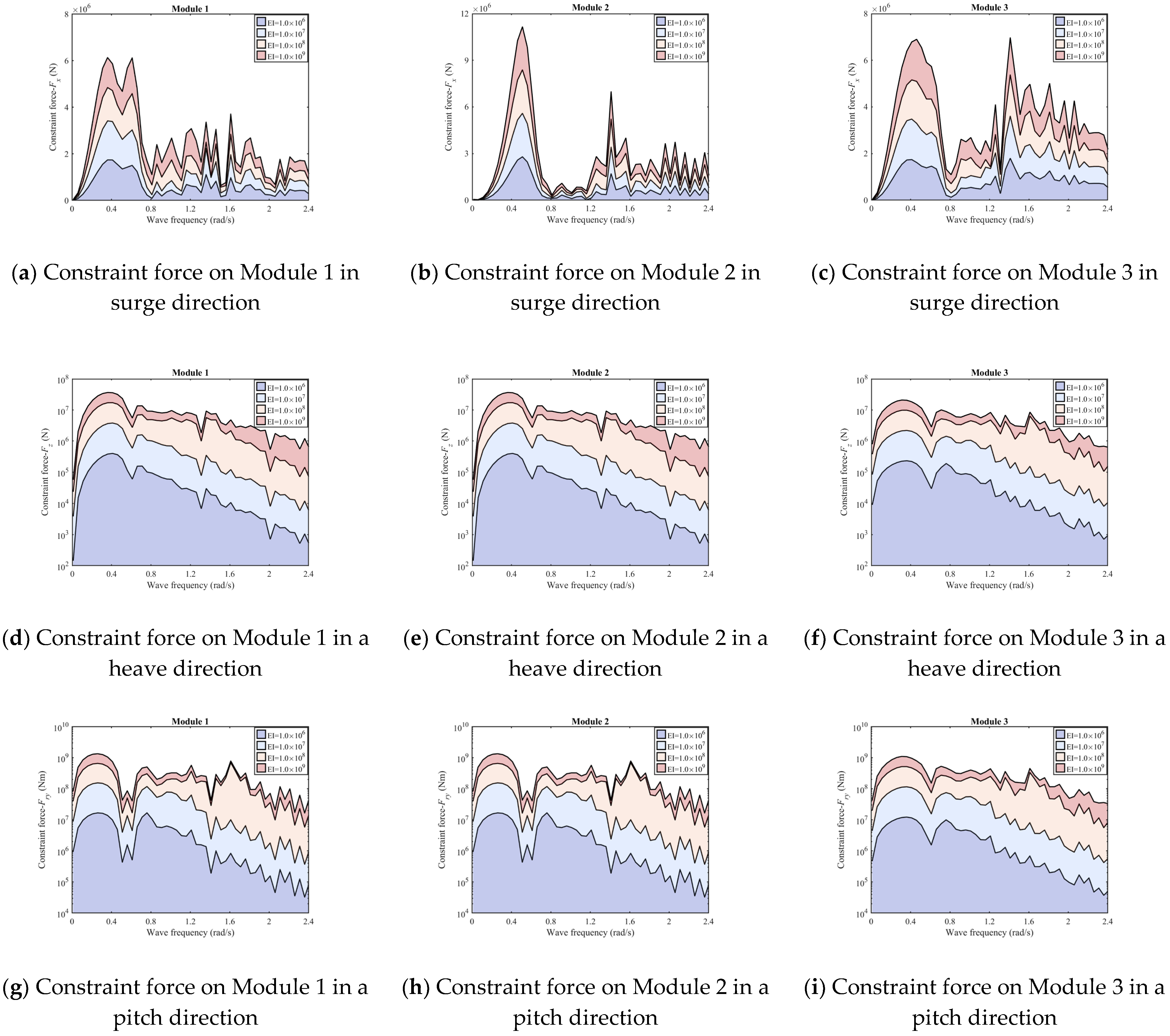
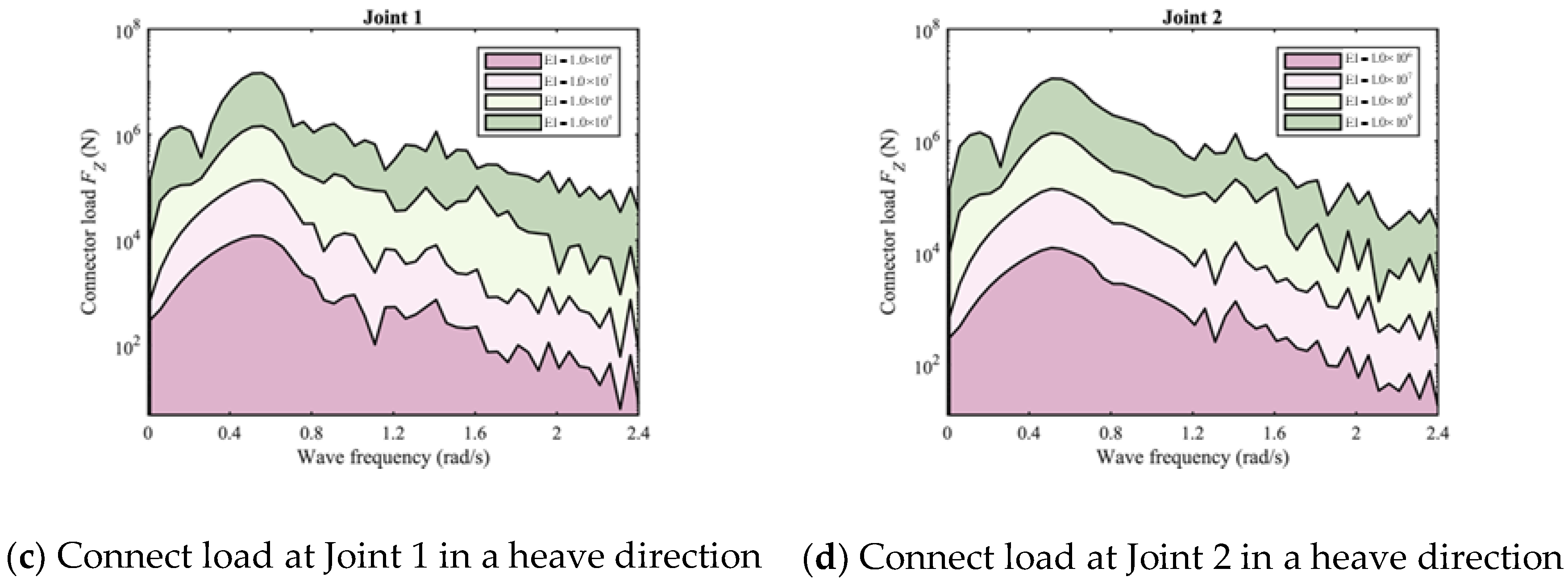
- Connector parameters such as bending stiffness have a significant impact on overall system performance. Both the response of the floating body and the internal load such as forces and moments obtained through the connections between adjacent modules are affected to varying degrees. For the semi-rigid connection system analyzed here, since the tension–compression characteristics are mainly determined by the axial stiffness EA, the force along the connector layout shows signs of insensitivity to different bending stiffness EI. With the exponential increase of the bending stiffness, loads in the surge direction seem to be insensitive for both connectors and the joint, while the loads in the heave and pitch direction of the connectors exhibit first exponential growth and then a slow-down at EI = 1.0 × 109 Nm2.
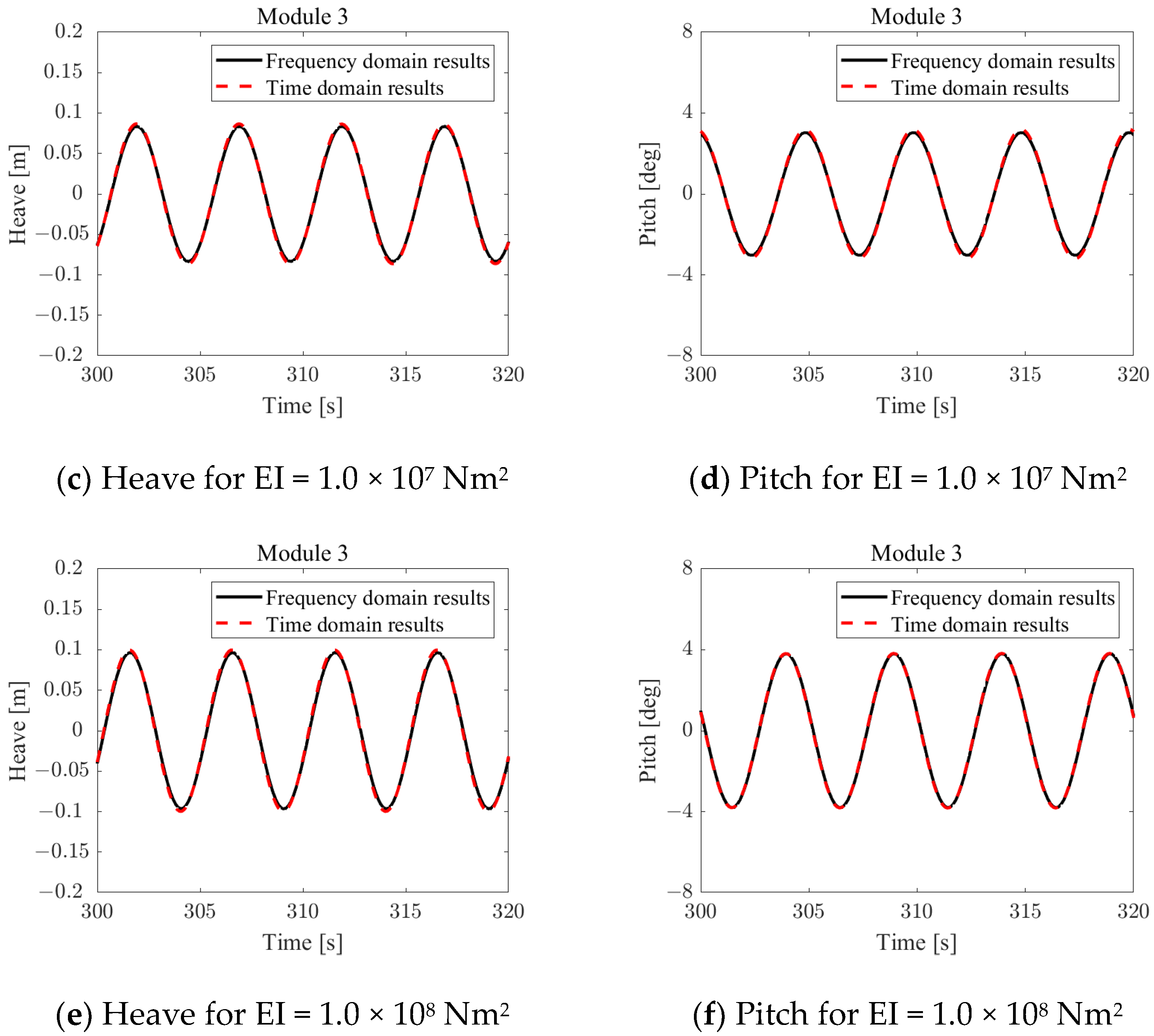
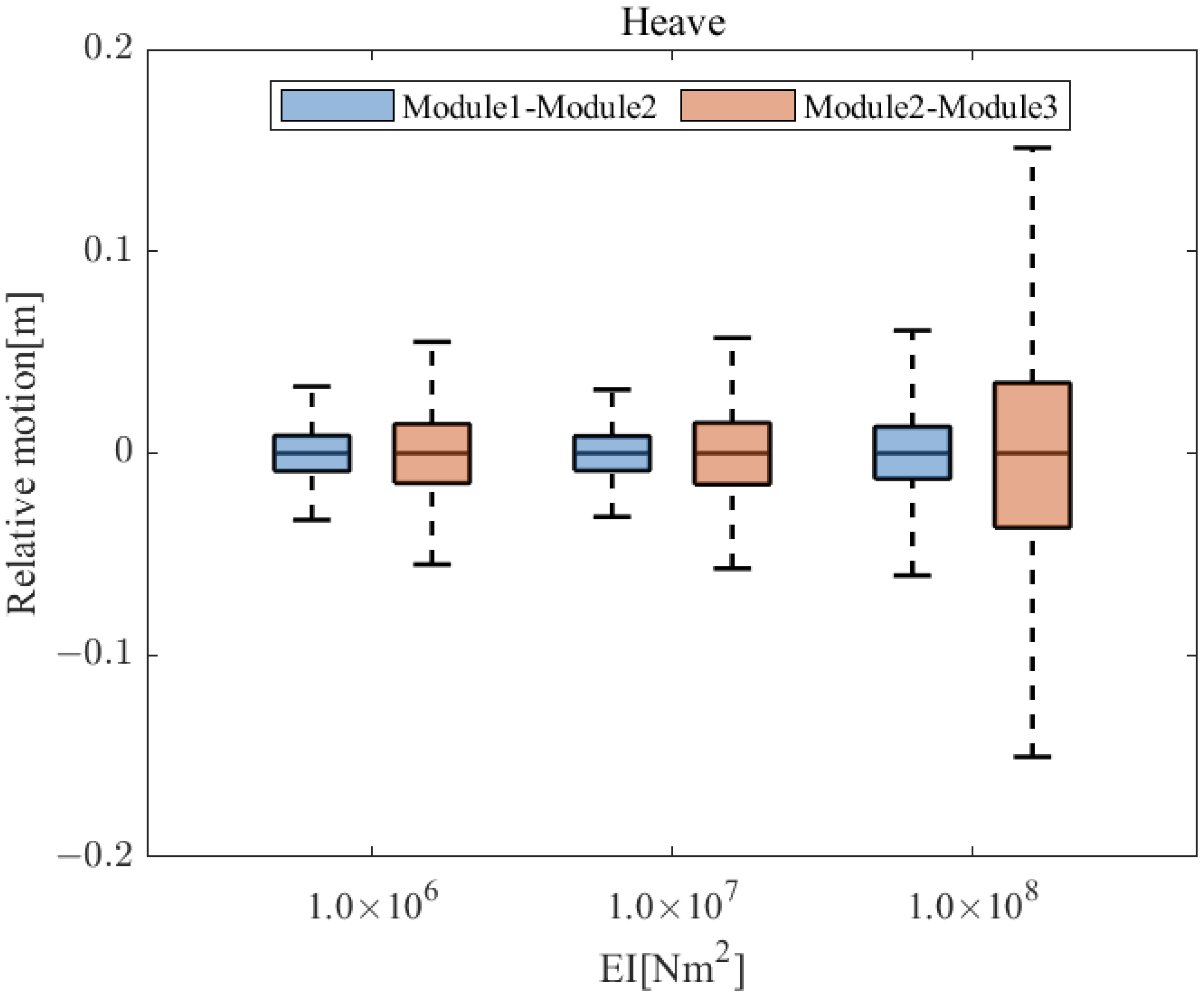
- The development of CPHSTDM makes it possible not only to analyze the system behaviors such as the specific motion state at a certain time and the relative motion between adjacent modules under the connection constraints, but also to judge the influence of stiffness selection on the whole system so that the phenomenon of global resonance caused by inappropriate stiffness selection can be avoided in the analysis of practical problems.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, M.; Guo, H.; Wang, R.; Tao, R.; Cheng, N. Effects of gap resonance on the hydrodynamics and dynamics of a multi-module floating system with narrow gaps. J. Mar. Sci. Eng. 2021, 9, 1256. [Google Scholar] [CrossRef]
- Koo, B.J.; Kim, M.H. Hydrodynamic interactions and relative motions of two floating platforms with mooring lines in side-by-side offloading operation. Appl. Ocean Res. 2005, 27, 292–310. [Google Scholar] [CrossRef]
- Zhao, W.; Yang, J.; Hu, Z.; Tao, L. Prediction of hydrodynamic performance of an FLNG system in side-by-side offloading operation. J. Fluids Struct. 2014, 46, 89–110. [Google Scholar] [CrossRef]
- Chen, M.; Eatock Taylor, R.; Choo, Y.S. Time domain modelling of the wave induced dynamics of multiple structures in close proximity. In Proceedings of the 3rd Marine Operations Specialty Symposium (MOSS), Singapore, 20–21 September 2016. [Google Scholar]
- Chen, M.; Zou, M.; Zhu, L. Frequency-domain response analysis of adjacent multiple floaters with flexible connections. J. Ship Mech. 2018, 22, 1164–1180. [Google Scholar]
- Zou, M.; Chen, M.; Zhu, L.; Li, L.; Zhao, W. A constant parameter time domain model for dynamic modelling of multi-body system with strong hydrodynamic interactions. Ocean. Eng. 2023, 268, 113376. [Google Scholar] [CrossRef]
- Chen, M.; Xiao, P.; Zhou, H.; Li, C.B.; Zhang, X. Fully Coupled Analysis of an Integrated Floating Wind-Wave Power Generation Platform in Operational Sea-States. Front. Energy Res. 2022, 10, 931057. [Google Scholar] [CrossRef]
- Zhang, X.; Li, B.; Hu, Z.; Deng, J.; Xiao, P.; Chen, M. Research on size optimization of wave energy converters based on a floating wind-wave combined power generation platform. Energies 2022, 15, 8681. [Google Scholar] [CrossRef]
- McAllister, K.R. Mobile offshore bases—An overview of recent research. J. Mar. Sci. Technol. 1997, 2, 173–181. [Google Scholar] [CrossRef]
- Remmers, G.; Zueck, R.; Palo, P.; Taylor, R. Mobile offshore base. In Proceedings of the The Eighth International Offshore and Polar Engineering Conference, Montréal, QC, Canada, 24–29 May 1998. [Google Scholar]
- Sakthivel, S.; Kumar, N.; Poguluri, S.K. Dynamic responses of serially connected truss pontoon-MOB—A numerical investigation. Ocean Eng. 2023, 277, 114209. [Google Scholar] [CrossRef]
- Jin, J. A Mixed Mode Function-Boundary Element Method for Very Large Floating Structure-Water Interaction Systems Excited by Airplane Landing Impacts. Ph.D. Thesis, University of Southampton, Southampton, UK, 2007. [Google Scholar]
- Fu, S.; Moan, T.; Chen, X.; Cui, W. Hydroelastic analysis of flexible floating interconnected structures. Ocean Eng. 2007, 34, 1516–1531. [Google Scholar] [CrossRef]
- Gao, R.; Wang, C.; Koh, C. Reducing hydroelastic response of pontoon-type very large floating structures using flexible connector and gill cells. Eng. Struct. 2013, 52, 372–383. [Google Scholar]
- Gao, J.-l.; Lyu, J.; Wang, J.-H.; Zhang, J.; Liu, Q.; Zang, J.; Zou, T. Study on Transient Gap Resonance with Consideration of the Motion of Floating Body. China Ocean Eng. 2022, 36, 994–1006. [Google Scholar] [CrossRef]
- Gao, J.; Gong, S.; He, Z.; Shi, H.; Zang, J.; Zou, T.; Bai, X. Study on Wave Loads during Steady-State Gap Resonance with Free Heave Motion of Floating Structure. J. Mar. Sci. Eng. 2023, 11, 448. [Google Scholar] [CrossRef]
- Molin, B. On the piston and sloshing modes in moonpools. J. Fluid Mech. 2001, 430, 27–50. [Google Scholar] [CrossRef]
- Zhao, W.; Pan, Z.; Lin, F.; Li, B.; Taylor, P.H.; Efthymiou, M. Estimation of gap resonance relevant to side-by-side offloading. Ocean Eng. 2018, 153, 1–9. [Google Scholar] [CrossRef]
- Jiang, D.; Tan, K.H.; Wang, C.M.; Dai, J. Research and development in connector systems for very large floating structures. Ocean Eng. 2021, 232, 109150. [Google Scholar] [CrossRef]
- Riggs, H.; Ertekin, R.; Mills, T. Impact of stiffness on the response of a multimodule mobile offshore base. Int. J. Offshore Polar Eng. 1999, 9, 126–133. [Google Scholar]
- Haney, J. Mob connector development. In Proceedings of the 3rd International Workshop on Very Large Floating Structures, Honolulu, HI, USA, 22–24 September 1999; Ertekin, R.C., Ed.; School of Ocean & Earth Science & Technology: Honolulu, HI, USA, 1999. VLFS’99. Volume 2. [Google Scholar]
- Rognaas, G.; Xu, J.; Lindseth, S.; Rosendahl, F. Mobile offshore base concepts. Concrete hull and steel topsides. Mar. Struct. 2001, 14, 5–23. [Google Scholar] [CrossRef]
- Xu, D.; Zhang, H.; Qi, E.; Hu, J.; Wu, Y. On study of nonlinear network dynamics of flexibly connected multi-module very large floating structures. In Vulnerability, Uncertainty, and Risk: Quantification, Mitigation, and Management, Proceedings of the Second International Conference on Vulnerability and Risk Analysis and Management (ICVRAM) and the Sixth International Symposium on Uncertainty Modeling and Analysis (ISUMA), Liverpool, UK, 13–16 July 2014; American Society of Civil Engineers: Reston, VA, USA, 30 October 2014; pp. 1805–1814. [Google Scholar]
- Wu, L.; Wang, Y.; Xiao, Z.; Li, Y. Hydrodynamic response for flexible connectors of mobile offshore base at rough sea states. Pet. Explor. Dev. 2016, 43, 1089–1096. [Google Scholar] [CrossRef]
- Xia, D.; Kim, J.W.; Ertekin, R.C. On the hydroelastic behavior of two-dimensional articulated plates. Mar. Struct. 2000, 13, 261–278. [Google Scholar] [CrossRef]
- Zhao, H.; Xu, D.; Zhang, H.; Shi, Q. A flexible connector design for multi-modular floating structures. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Madrid, Spain, 17–22 June 2018; p. V001T001A018. [Google Scholar]
- Qi, E.; Liu, C.; Xia, J.; Lu, Y.; Li, Z.; Yue, Y. Experimental study of functional simulation for flexible connectors of very large floating structures. J. Ship Mech. 2015, 19, 1245–1254. [Google Scholar]
- Zhang, H.; Qi, E.R.; Song, H.; Li, Z.W.; Xia, J.S. Study on mechanical property of connector with flexible sandwich of very large floating structures. J. Ship Mech. 2019, 23, 200–210. [Google Scholar]
- Loukogeorgaki, E.; Lentsiou, E.N.; Aksel, M.; Yagci, O. Experimental investigation of the hydroelastic and the structural response of a moored pontoon-type modular floating breakwater with flexible connectors. Coast. Eng. 2017, 121, 240–254. [Google Scholar] [CrossRef]
- Ding, J.; Wu, Y.-S.; Zhou, Y.; Ma, X.-Z.; Ling, H.J.; Xie, Z. Investigation of connector loads of a 3-module VLFS using experimental and numerical methods. Ocean Eng. 2020, 195, 106684. [Google Scholar] [CrossRef]
- Michailides, C.; Loukogeorgaki, E.; Angelides, D.C. Response analysis and optimum configuration of a modular floating structure with flexible connectors. Appl. Ocean Res. 2013, 43, 112–130. [Google Scholar] [CrossRef]
- Yang, P.; Li, Z.; Wu, Y.; Wen, W.; Ding, J.; Zhang, Z. Boussinesq-Hydroelasticity coupled model to investigate hydroelastic responses and connector loads of an eight-module VLFS near islands in time domain. Ocean Eng. 2019, 190, 106418. [Google Scholar] [CrossRef]
- Bispo, I.B.S.; Mohapatra, S.C.; Guedes Soares, C. Numerical model of a WEC-type attachment of a moored submerged horizontal set of articulated plates. Trends Marit. Technol. Eng. 2022, 2, 335–344. [Google Scholar]
- Bispo, I.B.S.; Mohapatra, S.C.; Guedes Soares, C. Numerical analysis of a moored very large floating structure composed by a set of hinged plates. Ocean Eng. 2022, 253, 110785. [Google Scholar] [CrossRef]
- Cummins, W. The impulse response function and ship motions. Schiffstechnik 1962, 9, 101–109. [Google Scholar]
- Tian, W.; Wang, Y.; Shi, W.; Michailides, C.; Wan, L.; Chen, M. Numerical study of hydrodynamic responses for a combined concept of semisubmersible wind turbine and different layouts of a wave energy converter. Ocean Eng. 2023, 272, 113824. [Google Scholar] [CrossRef]
- Shi, W.; Li, J.; Michailides, C.; Chen, M.; Wang, S.; Li, X. Dynamic Load Effects and Power Performance of an Integrated Wind–Wave Energy System Utilizing an Optimum Torus Wave Energy Converter. J. Mar. Sci. Eng. 2022, 10, 1985. [Google Scholar] [CrossRef]
- Chen, M.; Yuan, G.; Li, C.B.; Zhang, X.; Li, L. Dynamic analysis and extreme response evaluation of lifting operation of the offshore wind turbine jacket foundation using a floating crane vessel. J. Mar. Sci. Eng. 2022, 10, 2023. [Google Scholar] [CrossRef]
- Wang, D.; Ertekin, R.C.; Riggs, H.R. Three-dimensional hydroelastic response of a very large floating structure. Int. J. Offshore Polar Eng. 1991, 1, 307–316. [Google Scholar]
- Wang, Y.; Wang, X.; Xu, S.; Wang, L.; Ding, A.; Deng, Y. Experimental and Numerical Investigation of Influences of Connector Stiffness and Damping on Dynamics of a Multimodule VLFS. Int. J. Offshore Polar Eng. 2020, 30, 427–436. [Google Scholar] [CrossRef]
- Chen, M.; Zou, M.; Zhu, L.; Sun, L. Numerical analysis of GBS float-over deck installation at docking and undocking stages based on a coupled heave-roll-pitch impact model. In Proceedings of the ASME 2019 38th International Conference on Ocean, Offshore and Arctic Engineering, Glasgow, UK, 9–14 June 2019; American Society of Mechanical Engineers: New York, NY, USA, 2019. [Google Scholar]
- Chen, M.; Eatock Taylor, R.; Choo, Y.S. Time domain modeling of a dynamic impact oscillator under wave excitations. Ocean Eng. 2014, 76, 40–51. [Google Scholar] [CrossRef]
- Chen, M.; Eatock Taylor, R.; Choo, Y.S. Investigation of the complex dynamics of float-over deck installation based on a coupled heave-roll-pitch impact model. Ocean Eng. 2017, 137, 262–275. [Google Scholar] [CrossRef]
- Zou, M.; Zhu, L.; Chen, M. Numerical simulation of the complex impact behavior of float-over deck installation based on an efficient two-body heaving impact model. In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering, Madrid, Spain, 17–22 June 2018; American Society of Mechanical Engineers: New York, NY, USA, 2018. [Google Scholar]
- Zhu, L.; Zou, M.; Chen, M.; Li, L. Nonlinear dynamic analysis of float-over deck installation for a GBS platform based on a constant parameter time domain model. Ocean Eng. 2021, 235, 109443. [Google Scholar] [CrossRef]
- Chen, M.; Xiao, P.; Zhang, Z.; Sun, L.; Li, F. Effects of the end-stop mechanism on the nonlinear dynamics and power generation of a point absorber in regular waves. Ocean Eng. 2021, 242, 110123. [Google Scholar] [CrossRef]
- Hsu, C.S. On dynamic stability of elastic bodies with prescribed initial conditions. Int. J. Eng. Sci. 1966, 4, 1–21. [Google Scholar] [CrossRef]
- Liu, H.; Chen, M.; Han, Z.; Zhou, H.; Li, L. Feasibility study of a novel open ocean aquaculture ship integrating with a wind turbine and an internal turret mooring system. J. Mar. Sci. Eng. 2022, 10, 1729. [Google Scholar] [CrossRef]
- Sun, L.; Choo, Y.S.; Eatock Taylor, R.; Llorente, C. Responses of floating bodies with flexible connections. In Proceedings of the 2nd Marine Operations Specialty Symposium, Singapore, 6–8 August 2012; pp. 229–243. [Google Scholar]
- Eatock Taylor, R.; Taylor, P.; Stansby, P. A coupled hydrodynamic–structural model of the M4 wave energy converter. J. Fluids Struct. 2016, 63, 77–96. [Google Scholar] [CrossRef]
- Sun, L.; Eatock Taylor, R.; Choo, Y.S. Responses of interconnected floating bodies. IES J. Part A Civ. Struct. Eng. 2011, 4, 143–156. [Google Scholar] [CrossRef]
- Przemieniecki, J.S. Theory of Matrix Structural Analysis; Courier Corporation: Chelmsford, MA, USA, 1985. [Google Scholar]
- Qu, Z.-Q. Model Order Reduction Techniques with Applications in Finite Element Analysis: With Applications in Finite Element Analysis; Springer Science & Business Media: Berlin, Germany, 2004. [Google Scholar]
- Ogilvie, T.F. Recent Progress Towards the Understanding and Prediction of Ship Motions. In Proceedings of the Sixth Symposium on Naval Hydrodynamics, Washington, DC, USA, 28 September–4 October 1966. [Google Scholar]
- Taghipour, R.; Perez, T.; Moan, T. Hybrid frequency–time domain models for dynamic response analysis of marine structures. Ocean Eng. 2008, 35, 685–705. [Google Scholar] [CrossRef]
- Duarte, T.; Sarmento, A.; Alves, M.; Jonkman, J. State-Space Realization of the Wave-Radiation Force within FAST. In Proceedings of the 32nd International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 9–14 June 2013. [Google Scholar]
- Cheetham, P.; Du, S.; May, R.; Smith, S. Hydrodynamic analysis of ships side by side in waves. In Proceedings of the International Aerospace CFD Conference, Paris, France, 25–28 June 2007. [Google Scholar]
- Sun, L.; Taylor, R.E.; Choo, Y.S. Multi-body dynamic analysis of float-over installations. Ocean Eng. 2012, 51, 1–15. [Google Scholar] [CrossRef]
- Hu, Z.; Li, X.; Zhao, W.; Wu, X. Nonlinear dynamics and impact load in float-over installation. Appl. Ocean Res. 2017, 65, 60–78. [Google Scholar] [CrossRef]
- Hall, M. MoorDyn User’s Guide; Department of Mechanical Engineering, University of Maine: Orono, ME, USA, 2015. [Google Scholar]
- Li, C.B.; Choung, J. Structural Effects of Mass Distributions in a Floating Photovoltaic Power Plant. J. Mar. Sci. Eng. 2022, 10, 1738. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Module Characteristic | Value |
|---|---|
| Length, L(m) | 100 |
| Breadth, B(m) | 50 |
| Depth (m) | 5 |
| Draught, D(m) | 2 |
| Center of gravity above base, KG (m) | 2.5 |
| Radius of roll gyration, Rxx (m) | 14.5 |
| Radius of pitch gyration, Ryy (m) | 28.9 |
| Type | Bending Stiffness of the Connector | On Module 1 | On Module 2 | On Module 3 |
|---|---|---|---|---|
| Fx | EI = 1.0 × 106 Nm2 | 1.74 × 106 N | 2.80 × 106 N | 1.80 × 106 N |
| EI = 1.0 × 107 Nm2 | 1.67 × 106 N | 2.80 × 106 N | 1.74 × 106 N | |
| EI = 1.0 × 108 Nm2 | 1.56 × 106 N | 2.80 × 106 N | 1.80 × 106 N | |
| EI = 1.0 × 109 Nm2 | 1.53 × 106 N | 2.77 × 106 N | 1.80 × 106 N | |
| Fz | EI = 1.0 × 106 Nm2 | 2.33 × 105 N | 4.03 × 105 N | 2.34 × 105 N |
| EI = 1.0 × 107 Nm2 | 1.97 × 106 N | 3.42 × 106 N | 1.97 × 106 N | |
| EI = 1.0 × 108 Nm2 | 7.80 × 106 N | 1.35 × 107 N | 7.70 × 106 N | |
| EI = 1.0 × 109 Nm2 | 1.11 × 107 N | 1.94 × 107 N | 1.11 × 107 N | |
| Mry | EI = 1.0 × 106 Nm2 | 1.22 × 107 Nm | 1.69 × 107 Nm | 1.22 × 107 Nm |
| EI = 1.0 × 107 Nm2 | 1.03 × 108 Nm | 1.39 × 108 Nm | 1.04 × 108 Nm | |
| EI = 1.0 × 108 Nm2 | 4.09 × 108 Nm | 5.02 × 108 Nm | 4.04 × 108 Nm | |
| EI = 1.0 × 109 Nm2 | 5.82 × 108 Nm | 6.80 × 108 Nm | 5.82 × 108 Nm |
| Type | Bending Stiffness of the Connector | At Joint 1 | At Joint 2 |
|---|---|---|---|
| Fx | 1.0 × 106 Nm2 | 36.9 N | 36.9 N |
| 1.0 × 107 Nm2 | 36.9 N | 36.9 N | |
| 1.0 × 108 Nm2 | 36.8 N | 36.8 N | |
| 1.0 × 109 Nm2 | 36.5 N | 36.5 N | |
| Fz | 1.0 × 106 Nm2 | 1.20 × 104 N | 1.23 × 104 N |
| 1.0 × 107 Nm2 | 1.24 × 105 N | 1.27 × 105 N | |
| 1.0 × 108 Nm2 | 1.31 × 106 N | 1.24 × 106 N | |
| 1.0 × 109 Nm2 | 1.32 × 107 N | 1.16 × 107 N |
| k-SSM | R2 Defined by Equation (31) | ||
|---|---|---|---|
| 40 | K1,13(t) | K3,15(t) | K5,17(t) |
| 0.99568 | 0.99957 | 0.99286 | |
| K1,7(t) | K3,9(t) | K5,11(t) | |
| 0.9986 | 0.99905 | 0.99862 | |
| K7,13(t) | K9,15(t) | K11,17(t) | |
| 0.9986 | 0.99903 | 0.9984 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, M.; Ouyang, M.; Guo, H.; Zou, M.; Zhang, C. A Coupled Hydrodynamic–Structural Model for Flexible Interconnected Multiple Floating Bodies. J. Mar. Sci. Eng. 2023, 11, 813. https://doi.org/10.3390/jmse11040813
Chen M, Ouyang M, Guo H, Zou M, Zhang C. A Coupled Hydrodynamic–Structural Model for Flexible Interconnected Multiple Floating Bodies. Journal of Marine Science and Engineering. 2023; 11(4):813. https://doi.org/10.3390/jmse11040813
Chicago/Turabian StyleChen, Mingsheng, Mingjun Ouyang, Hongrui Guo, Meiyan Zou, and Chi Zhang. 2023. "A Coupled Hydrodynamic–Structural Model for Flexible Interconnected Multiple Floating Bodies" Journal of Marine Science and Engineering 11, no. 4: 813. https://doi.org/10.3390/jmse11040813