
Study of a Method for Drivability of Monopile in Complex Stratified Soil

Abstract
:1. Introduction
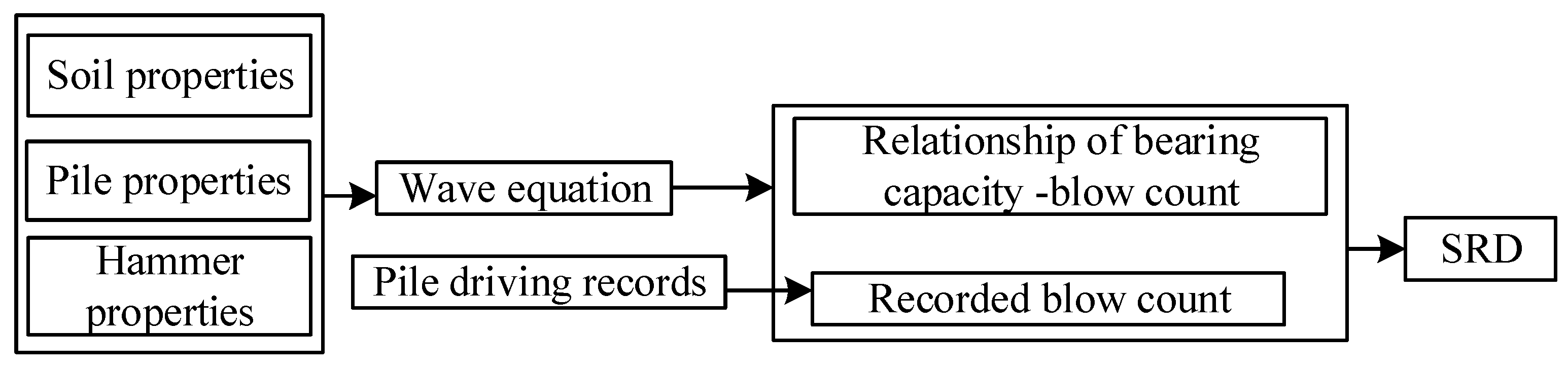
2. SRD Obtained by Back Analysis
3. Methods for Predicted SRD
- (1)
- Steven’s Method (1982)
- (2)
- Alm’s Method (2001)
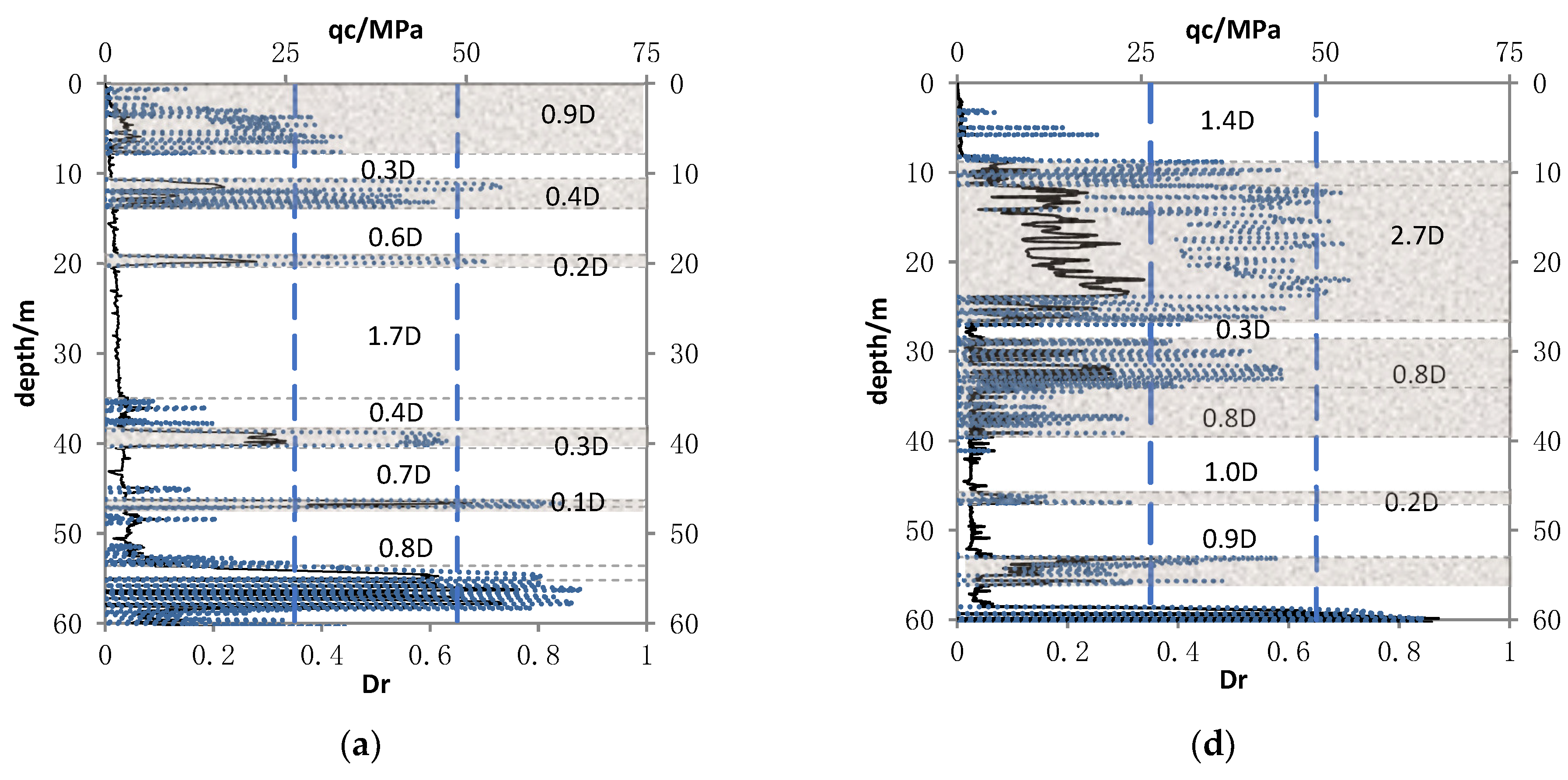
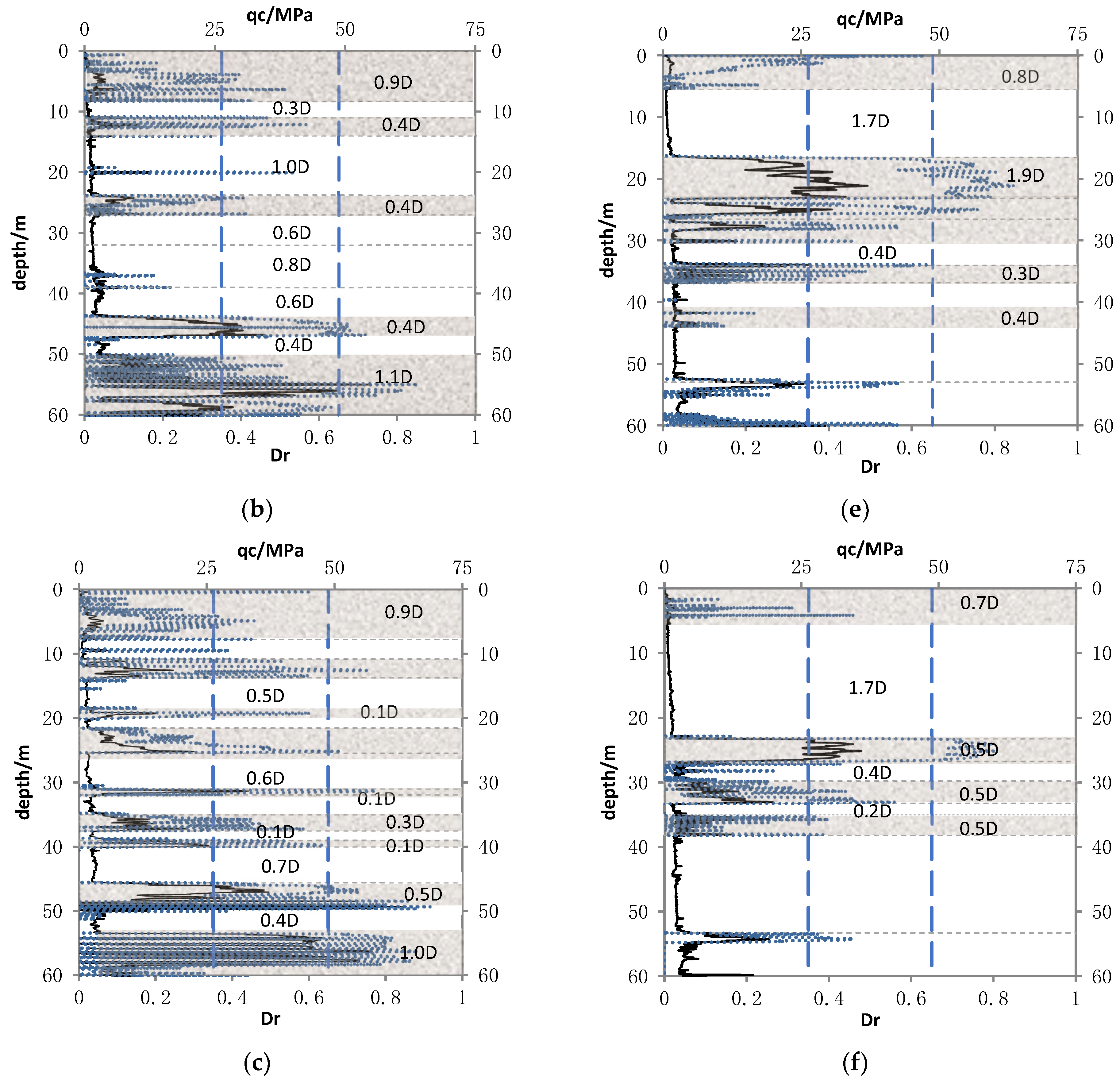
4. Pile Database
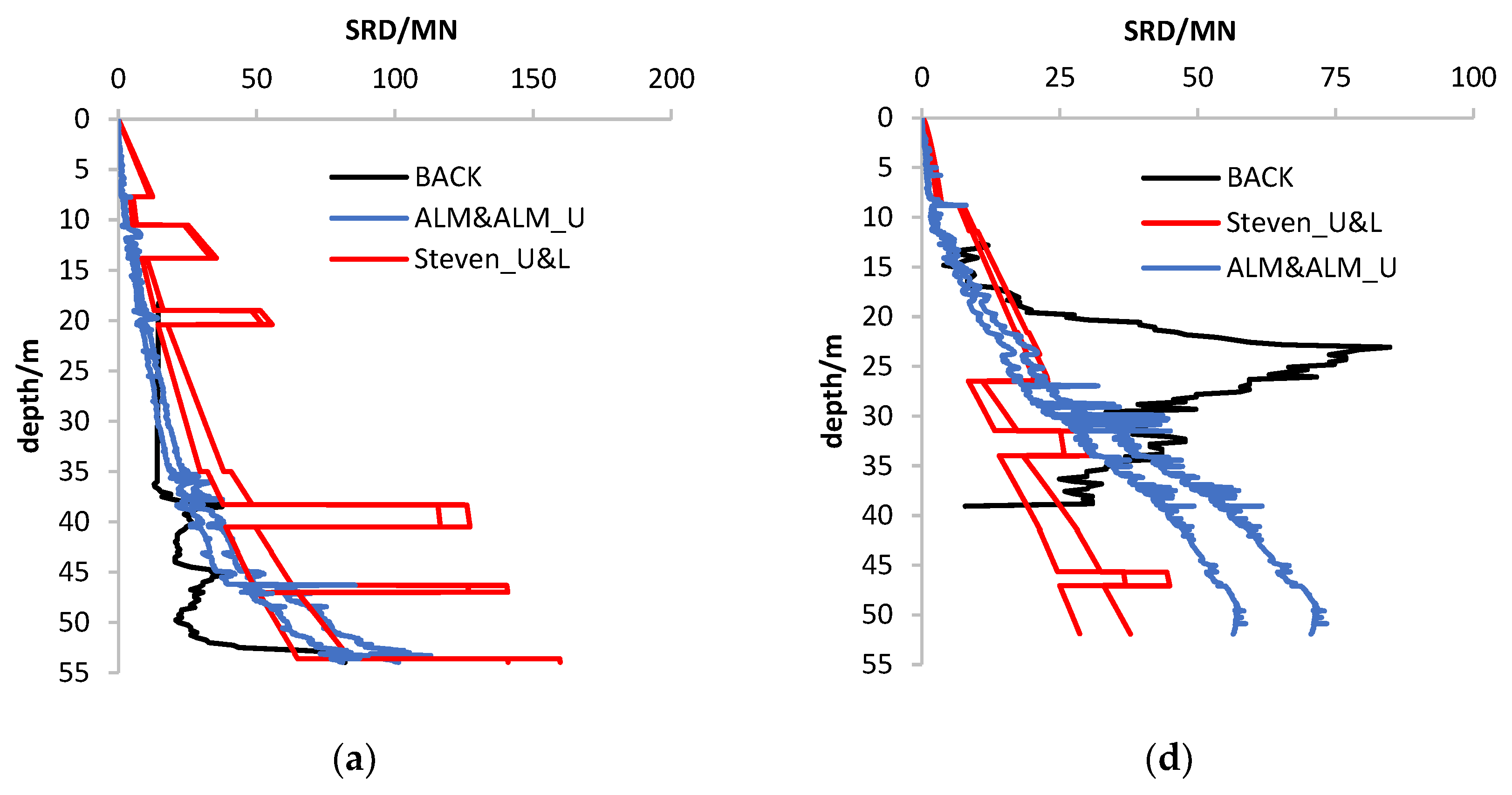
5. Back Analysis
6. Modified SRD Approach
6.1. Variation Characteristics of SRD with Soil Layer
6.2. Modified Method for SRD
7. Conclusions
- (1)
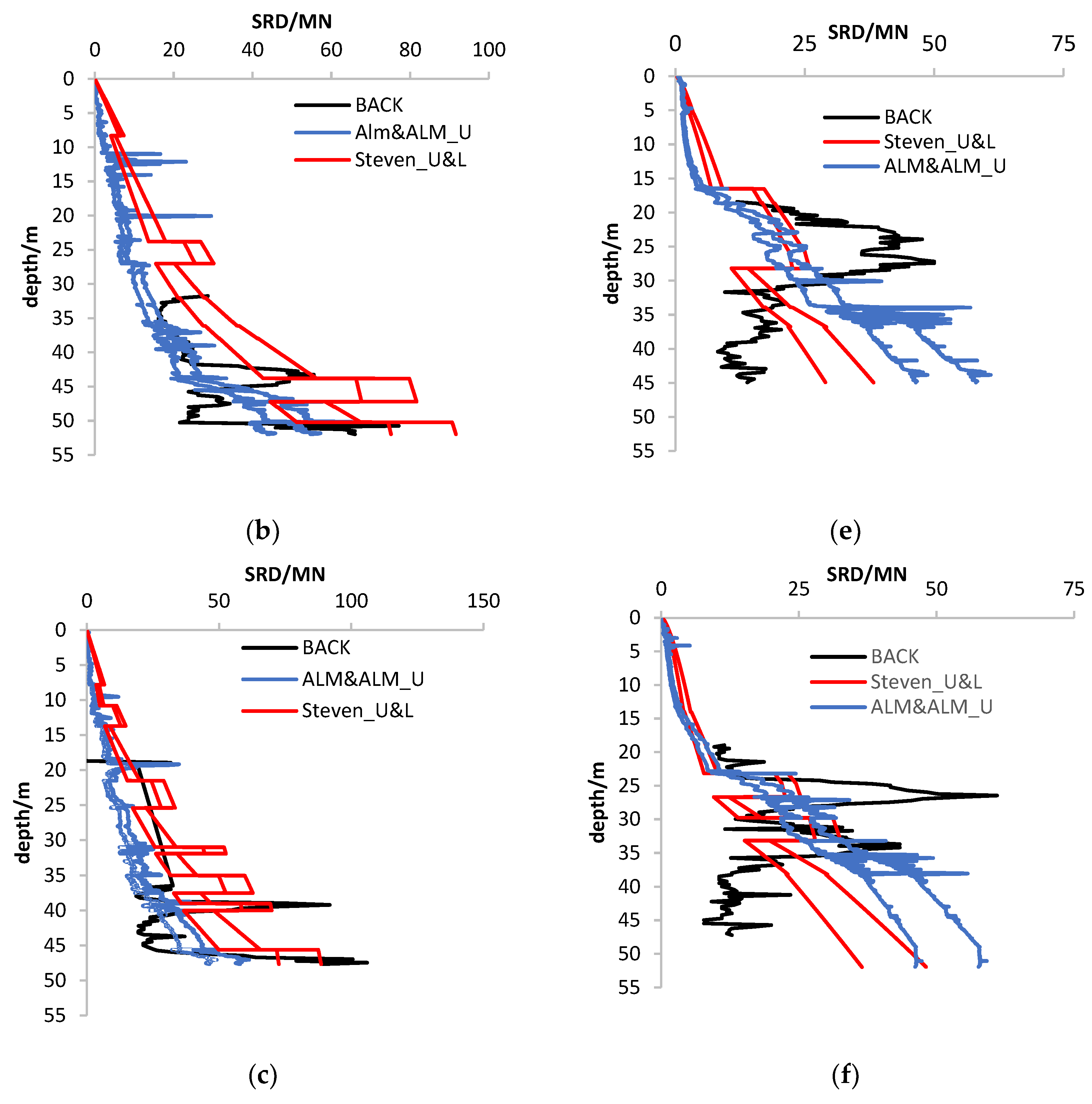
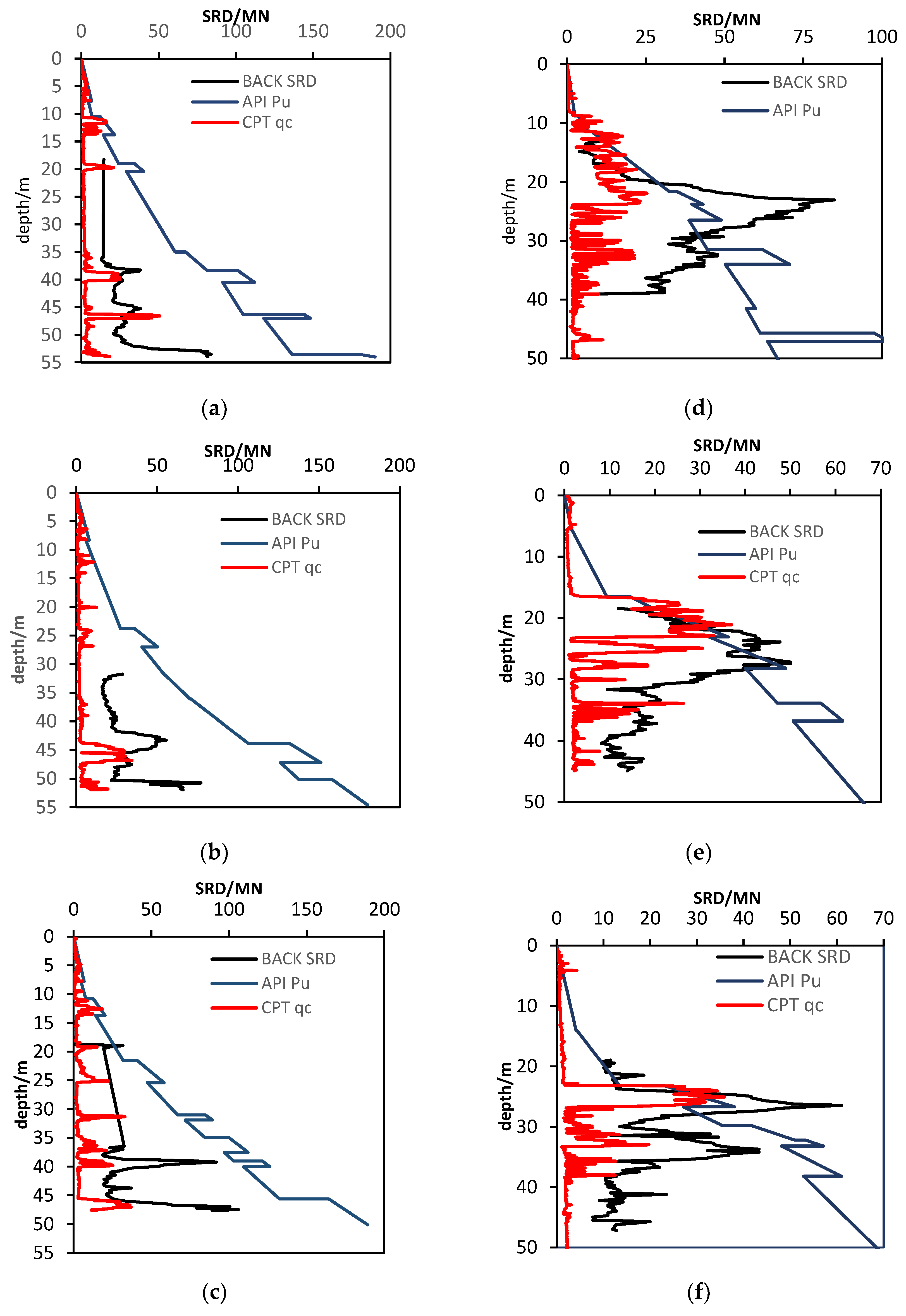
- The SRDs calculated using the Steven and Alm methods were generally consistent with those obtained by back analysis based on pile driving records, but the predicted SRD of the clay layer was higher than that obtained by back analysis, while the predicted SRD of sand layer was lower.
- (2)
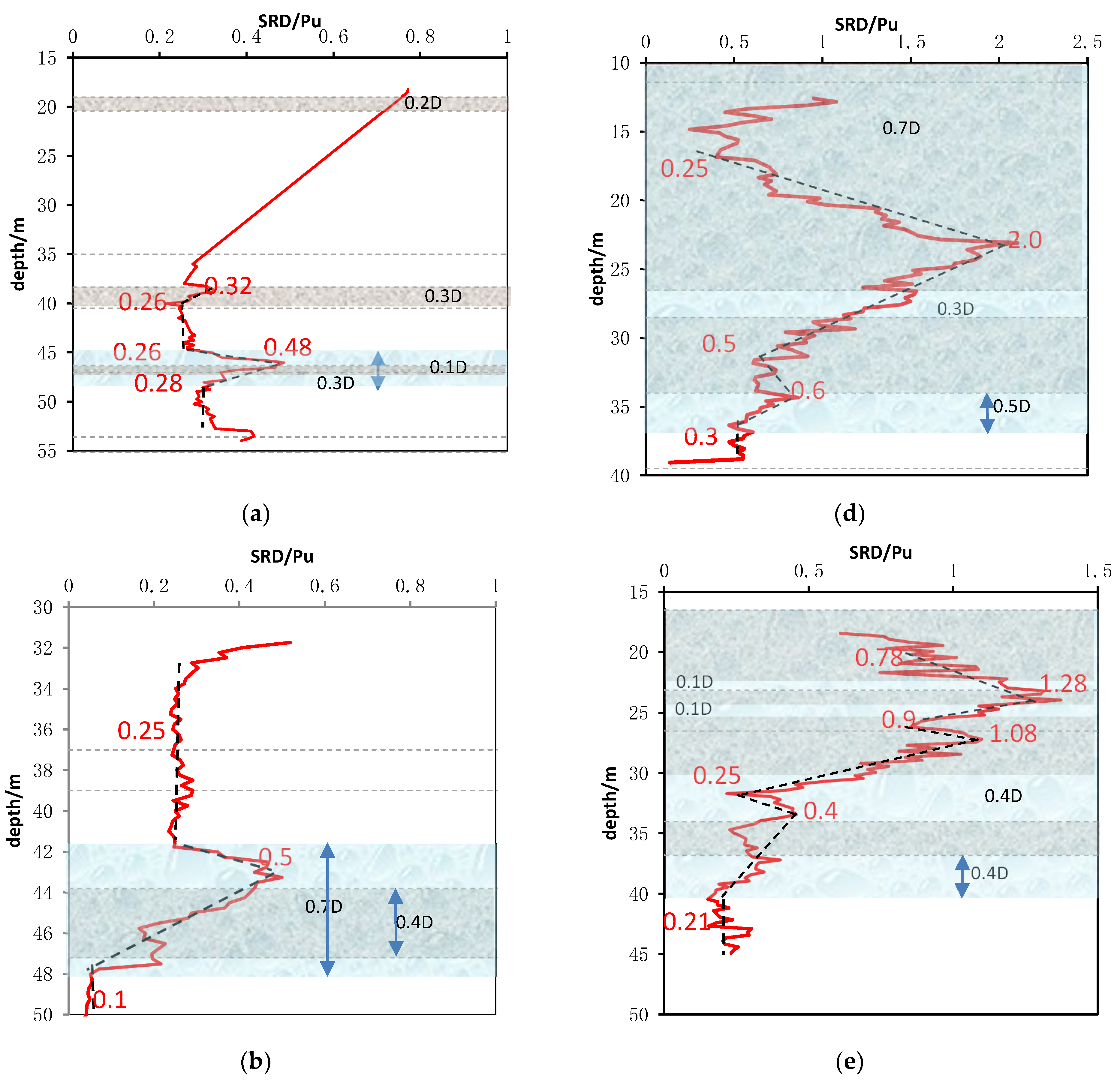
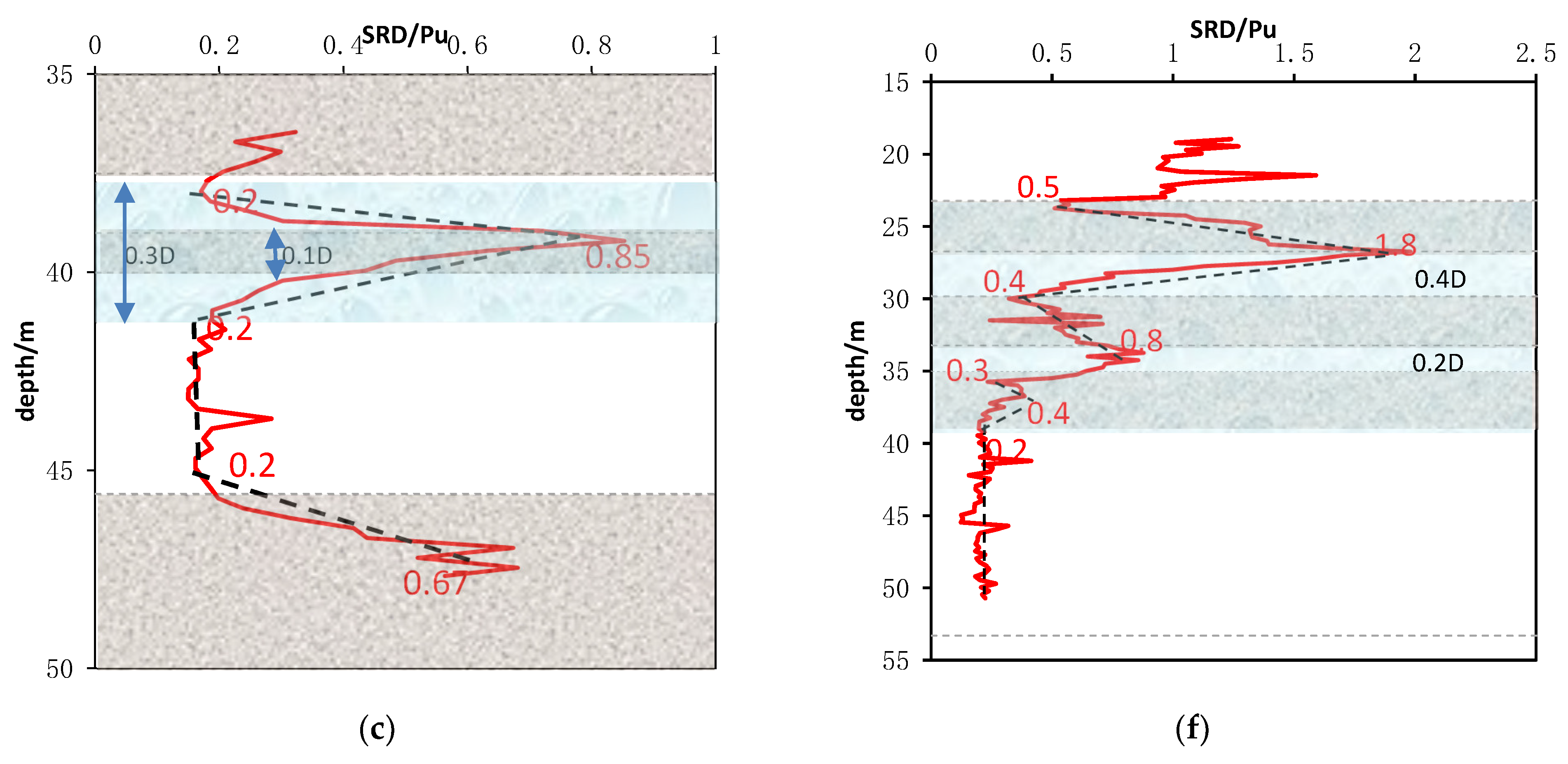
- During pile driving, SRD is very sensitive to the presence of a sand layer. Even if the thickness of the sand layer is only 0.1 D, this will cause the obvious fluctuation in SRD in the range of approximately 3 D. The influence of the clay layer with a thickness not exceeding 0.5 D on SRD is mainly concentrated in the range of the clay layer. The SRD/Pu is also sensitive to the presence of a sand layer, while the presence of a clay layer is not significant to SRD/Pu.
- (3)
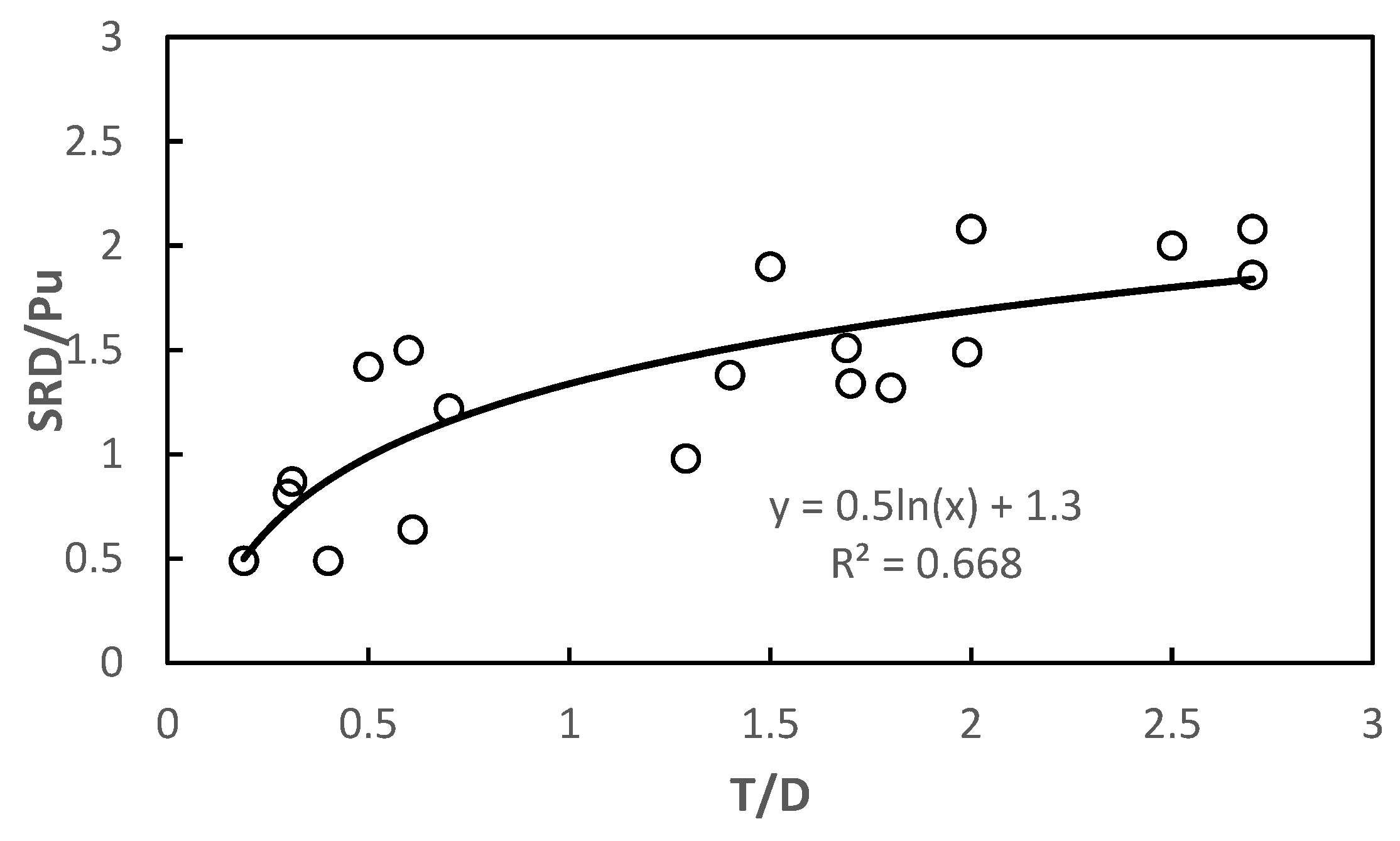
- The SRD/Pu for the clay layer is stable, and it is approximately 0.2–0.3 in two kinds of stratified soil regardless of the soil layer distribution. The SRD/Pu of the sand layer shows an approximately linear increment at first and then a decrement with the increase in penetration depth into sand layer, and the maximum SRD/Pu in the sand layer is related to the T/D in this study.
- (4)
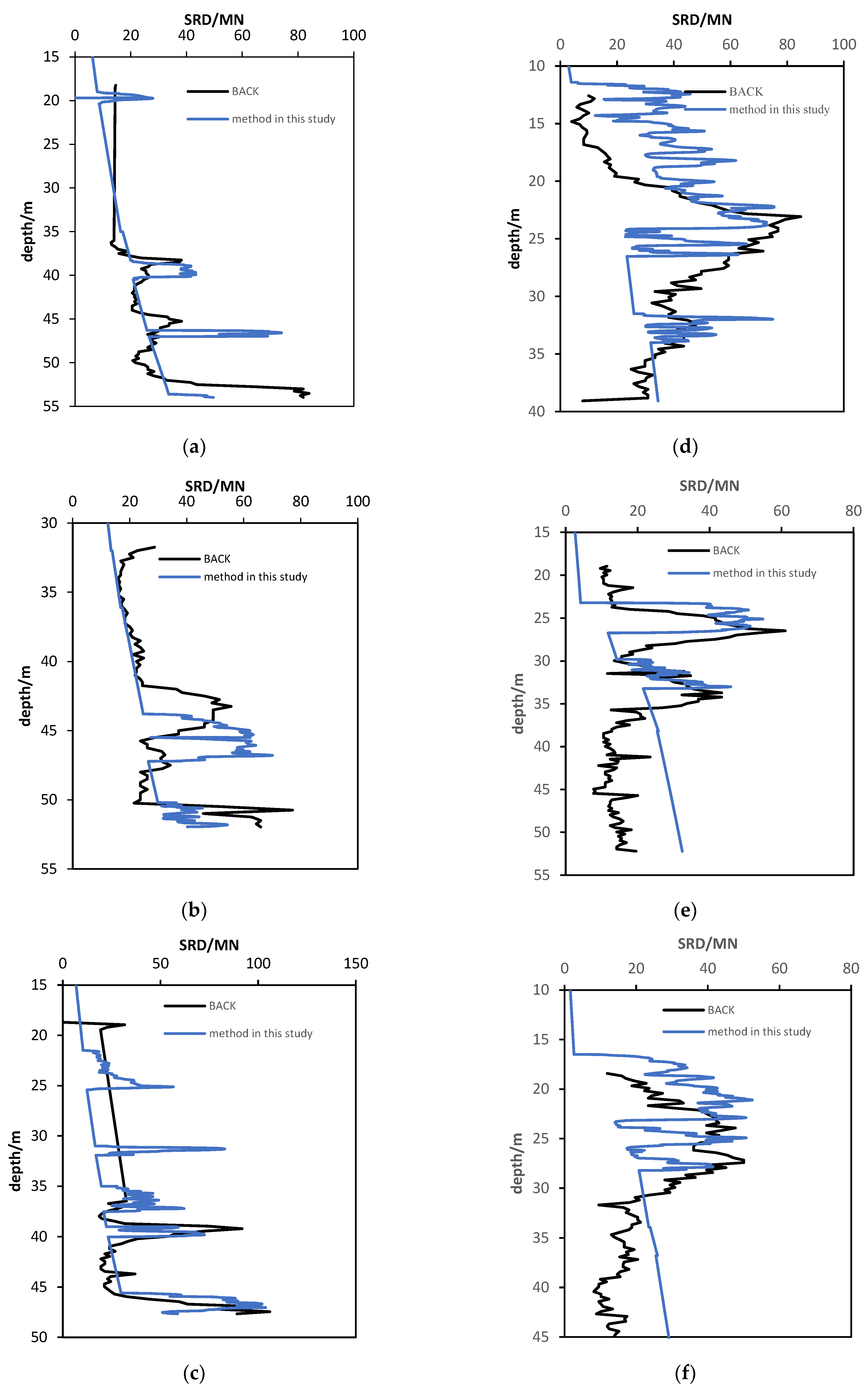
- The modified method is proposed by modifying the unit skin friction in clay and the unit end resistance in sand. Considering the influence of the soil layer distribution on the unit end resistance in sand, the reduction factor is determined considering the influence of T/D. The calculation results show that the proposed method is in good agreement with the results obtained by back analysis.
- (5)
- In this study, when the thickness of the sand layer is less than or equal to 0. 3 D, pile running occurred. It could be implied that the existence of a thin sand layer is more likely to cause pile running. More attention should be paid to this situation in practice.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, L.; Shi, W.; Zeng, Y.; Michailides, C.; Zheng, S.; Li, Y. Experimental investigation on the hydrodynamic effects of heave plates used in floating offshore wind turbines. Ocean Eng. 2023, 267, 113103. [Google Scholar] [CrossRef]
- Shi, W.; Zhang, L.; Karimirad, M.; Michailides, C.; Jiang, Z.; Li, X. Combined effects of aerodynamic and second-order hydrodynamic loads for three semisubmersible floating wind turbines in different water depths. Appl. Ocean. Res. 2023, 130, 103416. [Google Scholar] [CrossRef]
- Vignesh, V.; Mayakrishnan, M. Design parameters and behavior of helical piles in cohesive soils—A review. Arab. J. Geosci. 2020, 13, 1194. [Google Scholar] [CrossRef]
- Rathod, D.; Krishnanunni, K.T.; Nigitha, D. A Review on Conventional and Innovative Pile System for Offshore Wind Turbines. Geotech. Geol. Eng. 2020, 38, 3385–3402. [Google Scholar] [CrossRef]
- Byrne, B.W.; Houlsby, G. Helical piles: An innovative foundation design option for offshore wind turbines. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2015, 373, 20140081. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Stanier, S.A.; Black, J.A.; Hird, C.C. Modelling helical screw piles in soft clay and design implications. Geotech. Eng. 2013, 167, 447–460. [Google Scholar] [CrossRef] [Green Version]
- Vignesh, V.; Muthukumar, M. Experimental and numerical study of group effect on the behavior of helical piles in soft clays under uplift and lateral loading. Ocean Eng. 2023, 268, 113500. [Google Scholar] [CrossRef]
- Ding, H.; Wang, L.; Zhang, P.; Liang, Y.; Tian, Y.; Qi, X. The Recycling Torque of a Single-Plate Helical Pile for Offshore Wind Turbines in Dense Sand. Appl. Sci. 2019, 9, 4105. [Google Scholar] [CrossRef] [Green Version]
- Sánchez, S.; López-Gutiérrez, J.-S.; Negro, V.; Esteban, M.D. Foundations in Offshore Wind Farms: Evolution, Characteristics and Range of Use. Analysis of Main Dimensional Parameters in Monopile Foundations. J. Mar. Sci. Eng. 2019, 7, 441. [Google Scholar] [CrossRef] [Green Version]
- Esandi, J.M.; Buldakov, E.; Simons, R.; Stagonas, D. An experimental study on wave forces on a vertical cylinder due to spilling breaking and near-breaking wave groups. Coast. Eng. 2020, 162, 103778. [Google Scholar] [CrossRef]
- Shi, W.; Zeng, X.; Feng, X.; Shao, Y.; Li, X. Numerical study of higher-harmonic wave loads and runup on monopiles with and without ice-breaking cones based on a phase-inversion method. Ocean Eng. 2023, 267, 113221. [Google Scholar] [CrossRef]
- Webster, S.; Robinson, B. Driveability Analysis Techniques for Offshore Pile Installations. In Proceedings of the ASME 2013 32nd International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 9–14 June 2013. [Google Scholar] [CrossRef] [Green Version]
- Lehane, B.M.; Randolph, M.F. Evaluation of a Minimum Base Resistance for Driven Pipe Piles in Siliceous Sand. J. Geotech. Geoenviron. Eng. 2002, 128, 198–205. [Google Scholar] [CrossRef]
- Smith, E.A.L. 1960, Pile Driving Analysis by the Wave Equation. J. Soil Mech. Found. Div. 1962, 127, 1145–1193. [Google Scholar]
- Semple, R.M.; Gemeinhardt, J.P. Stress history approach to analysis of soil resistance to pile driving. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 1–4 May 1981. [Google Scholar] [CrossRef]
- Stevens, R.S.; Wiltsie, E.A.; Turton, T.H. Evaluating pile drivability for hard clay, very dense sand, and rock. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 3–6 May 1982. [Google Scholar] [CrossRef]
- Toolan, F.E.; Fox, D.A. Geotechnical planning of piled foundations for offshore platforms. Proc. Inst. Civ. Eng. 1977, 62, 221–244. [Google Scholar] [CrossRef] [Green Version]
- Alm, T.; Hamre, L. Soil model for pile driveability predictions based on cpt interpretations. In Proceedings of the International Conference on Soil Mechanics and Geotechnical Engineering, Istanbul, Turkey, 27–31 August 2001. [Google Scholar]
- Schneider, J.A.; Harmon, I.A. Analyzing drivability of open ended piles in very dense sands. DFI J.—J. Deep Found. Inst. 2010, 4, 32–44. [Google Scholar] [CrossRef]
- Jardine, R.J.; Chow, F.C.; Overy, R.F.; Standing, J. ICP Design Methods for Driven Piles in Sands and Clays; Institution of Civil Engineering (ICE): London, UK, 2005. [Google Scholar]
- Lehane, B.; Schneider, J.; Xu, X. The UWA-05 method for prediction of axial capacity of driven piles in sand. In Proceedings of the International Symposium on Frontiers in Offshore Geotechnics, Perth, Australia, 19–21 September 2005. [Google Scholar]
- Kolk, H.J.; Baaijens, A.E.; Senders, M. Design criteria for pipe piles in silica sands. In Proceedings of the First International Symposium on Frontiers in Offshore Geotechnics, Perth, Australia, 19–21 September 2005. [Google Scholar]
- Prendergast, L.J.; Gandina, P.; Gavin, K. Factors influencing the prediction of pile driveability using cpt-based approaches. Energies 2020, 13, 3128. [Google Scholar] [CrossRef]
- Anusic, I.; Eiksund, G.; Liingaard, M. Comparison of pile driveability methods based on a case study from an offshore wind farm in North Sea. In Proceedings of the 17th Nordic Geotechnical Meeting Challenges in Nordic Geotechnic, Reykjavik, Iceland, 25–28 May 2016; pp. 1037–1046. [Google Scholar]
- Available online: https://www.bladt.dk/ (accessed on 1 October 2022).
- Ferreira, J.M. Drveability Study for XL Offshore Monopile Foundation. Master’s Thesis, University of Porto, Porto, Portugal, 2016. [Google Scholar]
- Davidson, J.; Castelletti, M.; Torres, I.; Terente, V.A.; Irvine, J.; Raymackers, S. The evaluation of current pile driving prediction methods for driven monopile foundations in London clay. In Proceedings of the 20th International Conference on Soil Mechanics and Geotechnical Engineering, Paris, France, 19–20 February 2018. [Google Scholar]
- Byrne, T.; Gavin, K.; Prendergast, L.J.; Cachim, P.; Doherty, P.; Chenicheri Pulukul, S. Performance of CPT-based methods to assess monopile driveability in north sea sands. Ocean Eng. 2018, 166, 76–91. [Google Scholar] [CrossRef] [Green Version]
- Georgios, P.S.; Meissl, T.S. Evaluation of SRD methodologies prediction accuracy at offshore wind farms in the Irish Sea. In Proceedings of the 16th Asian Regional Conference on Soil Mechanics and Geotechnical Engineering, Taipei, Taiwan, 14–18 October 2019. [Google Scholar]
- Maynard, A.W.; Hamre, L.; Butterworth, D.; Davison, F. Improved Pile Installation Predictions for Monopiles, Stress Wave Theory and Testing Methods for Deep Foundations: 10th International Conference; ASTM International: West Conshohocken, PA, USA, 2019; pp. 426–449. [Google Scholar] [CrossRef]
- Jamiolkowski, M.; Ghionna, V.N.; Lancellotta, R.; Pasqualini, E. New correlations of penetration tests for design practice. In Penetration Testing 1988: Proceedings of the First International Symposium on Penetration Testing ISOPT-1, Orlando, FL, USA, 20–24 March 1988; Pergamon: Oxford, UK, 1990. [Google Scholar]
- Robertson, P.K.; Cabal, K. Guide to Cone Penetration Testing; Gregg Drilling LLC.: California, CA, USA, 2022. [Google Scholar]
- Lambe, T.W.; Whitman, R.V. Soil Mechanics; John Wiley & Sons: California, CA, USA, 1969. [Google Scholar]
- Lunne, T.; Robertson, P.K.; Powell, J.J.M. Cone Penetration Testing in Geotechnical Practice; Blackie Academic & Professional: London, UK, 1997. [Google Scholar]
- De Ruiter, J.; Beringen, F.L. Pile foundations for large North Sea structures. Mar. Geotechnol. 1979, 3, 267–314. [Google Scholar] [CrossRef]
- Bustamante, M.; Gianeselli, L. Pile bearing capacity by means of static penetrometer CPT. In Proceedings of the 2nd European Symposium on Penetration Testing, Amsterdam, The Netherlands, 24–27 May 1982. [Google Scholar]
- White, D.J.; Bolton, M.D. Comparing CPT and pile base resistance in sand. Geotech. Eng. 2005, 158, 3–14. [Google Scholar] [CrossRef]
- Randolph, M.F.; May, M.; Leong, E.C.; Hyden, A.M.; Murff, J.D. Soli plug response in open ended pipe piles. J. Geotech. Eng. 1992, 118, 743–759. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Case 1 (a) | Case 1 (b) | Case 1 (c) | Case 2 (a) | Case 2 (b) | Case 2 (c) |
|---|---|---|---|---|---|---|
| Diameter (m) | 8.8 | 9.0 | 8.8 | 6.5 | 6.5 | 7.0 |
| Thickness at tip (mm) | 94 | 96 | 94 | 90 | 90 | 80 |
| Length (m) | 108.8 | 107.0 | 101.9 | 69.0 | 75.0 | 82.3 |
| Penetration underweight pile + hammer (m) | 18.0 | 31.5 | 18.7 | 12.3 | 18.2 | 18.7 |
| Pile running (m) | 18.5–36.0 | / | 19.5–36.5 | / | / | / |
| Final penetration depth (m) | 54.0 | 52.0 | 47.7 | 38.9 | 44.9 | 52.2 |
| Hammer | MHU3500 | MHU 3500 | MHU3500 | MHU1900 | IHC1400 | IHC1400 |
| Dominant soil | Clay, Su = 16–115 Kpa | Sand, most are MED DENSE sand | ||||
| Interlayer soil | The thickness of each sand layer is about 0.1–0.5 D | The thickness of each clay layer is about 0.1–0.4 D | ||||
| Quake (mm) | Damping (s/m) | |||
|---|---|---|---|---|
| Shaft | Toe | Shaft | Toe | |
| Sand | 2.5 | 2.5 | 0.16 | 0.5 |
| Clay | 2.5 | 2.5 | 0.65 | 0.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Shen, K.; Wang, B.; Wen, G.; Li, S. Study of a Method for Drivability of Monopile in Complex Stratified Soil. J. Mar. Sci. Eng. 2023, 11, 603. https://doi.org/10.3390/jmse11030603
Zhang J, Shen K, Wang B, Wen G, Li S. Study of a Method for Drivability of Monopile in Complex Stratified Soil. Journal of Marine Science and Engineering. 2023; 11(3):603. https://doi.org/10.3390/jmse11030603
Chicago/Turabian StyleZhang, Jie, Kanmin Shen, Bin Wang, Guangyuan Wen, and Sa Li. 2023. "Study of a Method for Drivability of Monopile in Complex Stratified Soil" Journal of Marine Science and Engineering 11, no. 3: 603. https://doi.org/10.3390/jmse11030603