
Insight into Hydrodynamic Damping of a Segmented Barge Using Numerical Free-Decay Tests

Abstract
:1. Introduction
2. Numerical Methods
2.1. Modal Solver for the Structure
2.2. Rayleigh Damping
2.3. Damping Determination
2.4. Flow Solver
3. Modal-Based Coupling
| Algorithm 1 Reduced order modal approach to weakly coupled FSI. |
1. Calculate dry vibration natural frequencies and their mass-normalised mode shapes 2. Setup simulation initial conditions (e.g., initial structure displacement and fluid boundary conditions) 3. Build RBF connections fluid face/structural node 4. Simulation loop, for each time-step : (a) Transfer fluid loads to structural nodes (b) Solve set of Equation (10) for all mode shapes (c) Obtain new shape of the structure via Equation (6) (d) Perform RBF mesh interpolation from the old to the new structure shape (e) Solve flow for time , influenced by the deformation of the structure (f) If residuals of fluid solver are too high, go to step 4.(a) |
4. Vertical Vibrations of a Flexible Barge
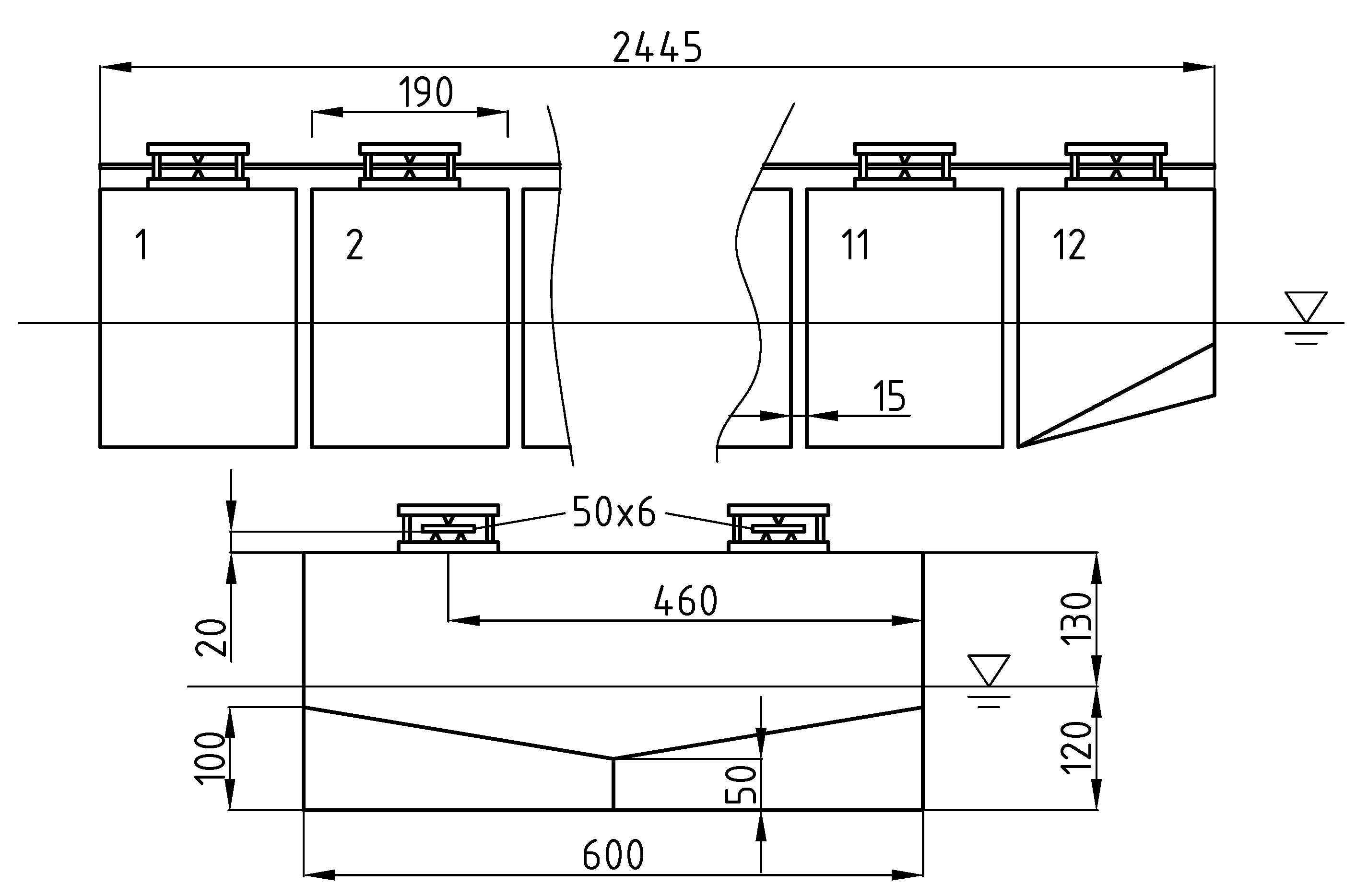
4.1. Barge Characteristics
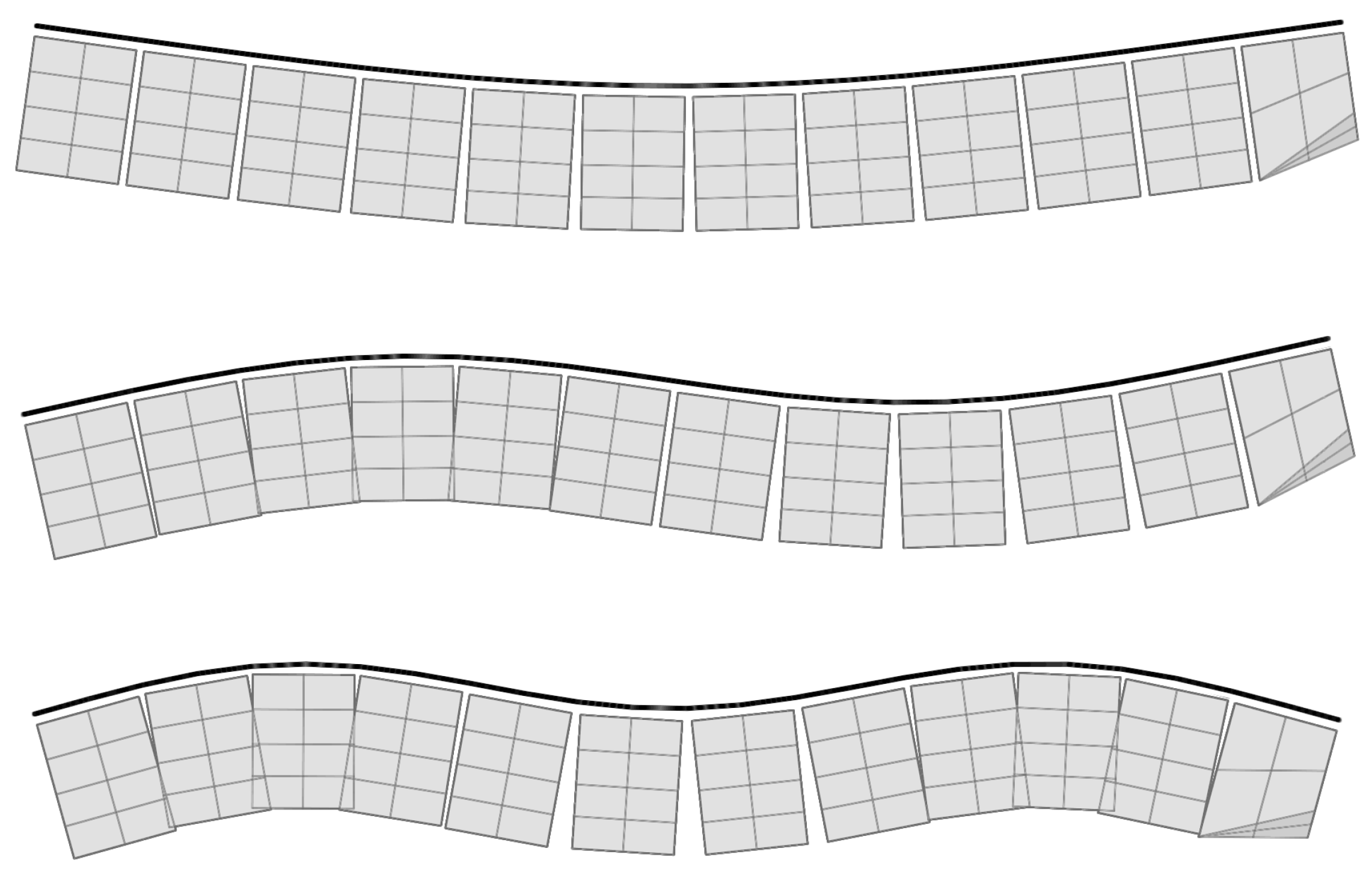
4.2. Extraction of Mode Shapes
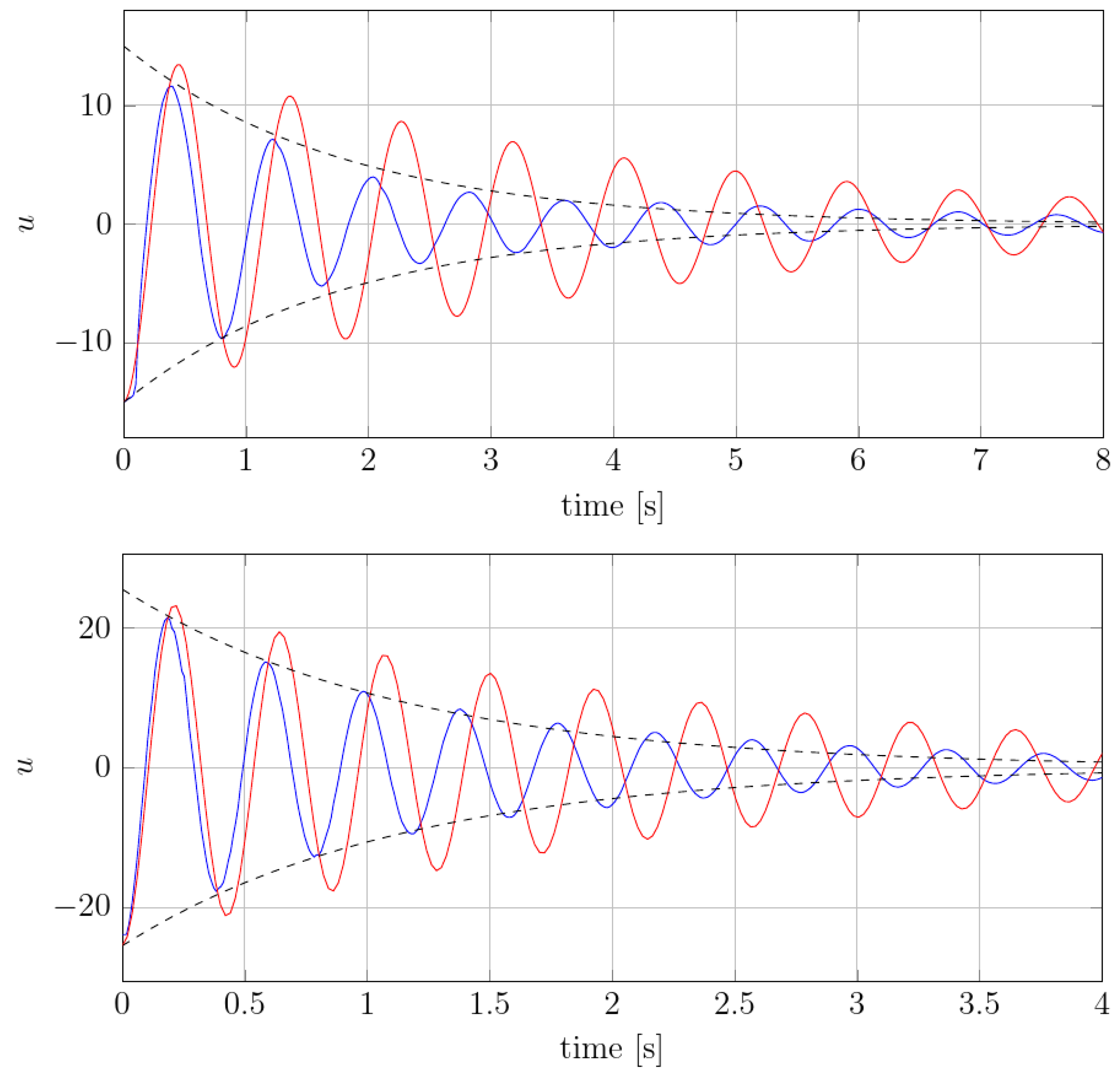
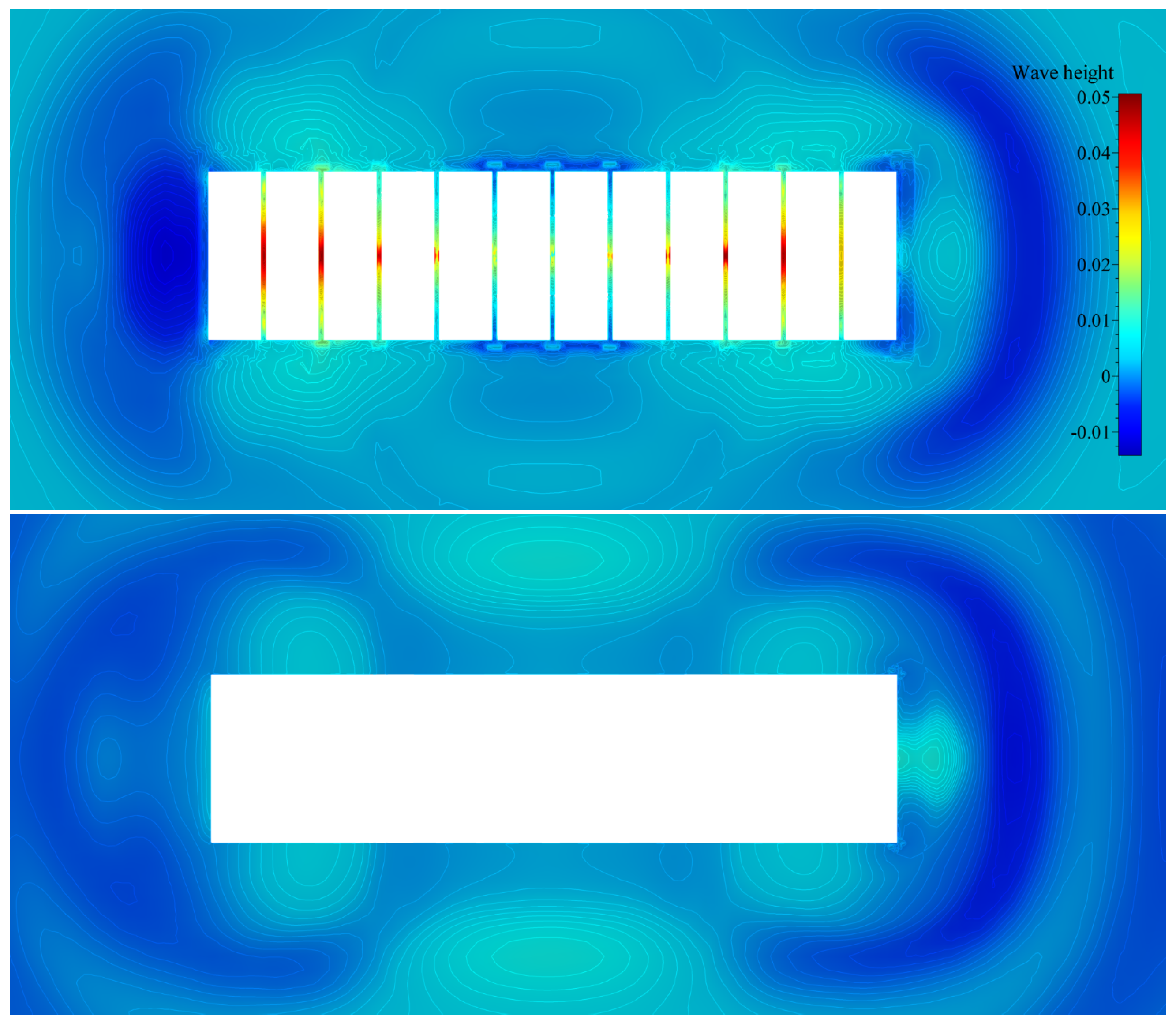
4.3. Hydroelastic Simulations
4.4. Discussion
5. Conclusions
References
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bašić, J.; Parunov, J. Analytical and Numerical Computation of Added Mass in Ship Vibration Analysis. Brodogradnja 2013, 64, 1–11. [Google Scholar]
- Abd Samad, F.I.; Mohd Yusop, M.Y.; Shaharuddin, N.M.R.; Ismail, N.; Yaakob, O.B. Slamming Impact Accelerations Analysis On Small High Speed Passenger Crafts. Brodogradnja 2021, 72, 79–94. [Google Scholar] [CrossRef]
- Kleivane, S.K.; Leira, B.J.; Steen, S. Development of a reliability model for crack growth occurrence for a secondary hull component. Brodogradnja 2023, 74, 99–115. [Google Scholar] [CrossRef]
- Kim, S.W.; Lee, S.J. Development Of A New Fatigue Damage Model For Quarter-Modal Spectra In Frequency Domain. Brodogradnja 2020, 71, 39–57. [Google Scholar] [CrossRef]
- Wenxi, L.; Huiren, G.; Qidou, Z.; Jingjun, L. Study On Structural-Acoustic Characteristics Of Cylindrical Shell Based On Wavenumber Spectrum Analysis Method. Brodogradnja 2021, 72, 57–71. [Google Scholar] [CrossRef]
- Jensen, J.J. Load and Global Response of Ships; Elsevier Ocean Engineering Series; Elsevier Science: Amsterdam, The Netherlands, 2001; pp. 268–271. [Google Scholar]
- Storhaug, G. Experimental Investigation of Wave Induced Vibrations and Their Effect on the Fatigue Loading of Ships. Ph.D Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2007. [Google Scholar]
- Storhaug, G. The measured contribution of whipping and springing on the fatigue and extreme loading of container vessels. Int. J. Nav. Archit. Ocean Eng. 2014, 6, 1096–1110. [Google Scholar] [CrossRef] [Green Version]
- Norwood, M.N.; Dow, R.S. Dynamic analysis of ship structures. Ships Offshore Struct. 2013, 8, 270–288. [Google Scholar] [CrossRef]
- Blake, W.K.; Chen, Y.K.; Walter, D.; Briggs, R. Design and Sea Trial Evaluation of the Containership MV Pfeiffer for Low Vibration. SNAME Trans. 1994, 102, 107–136. [Google Scholar]
- Colomés, O.; Verdugo, F.; Akkerman, I. A monolithic finite element formulation for the hydroelastic analysis of very large floating structures. Int. J. Numer. Methods Eng. 2023, 124, 714–751. [Google Scholar] [CrossRef]
- Chourdakis, G.; Davis, K.; Rodenberg, B.; Schulte, M.; Simonis, F.; Uekermann, B.; Abrams, G.; Bungartz, H.J.; Cheung Yau, L.; Desai, I.; et al. preCICE v2: A sustainable and user-friendly coupling library. Open Res. Eur. 2022, 2, 51. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, Y.; Tian, X.; Guo, X.; Li, X.; Zhang, X. A numerical framework for hydroelastic analysis of a flexible floating structure under unsteady external excitations: Motion and internal force/moment. Ocean Eng. 2022, 253, 111288. [Google Scholar] [CrossRef]
- Huang, H.; Chen, X.-j.; Liu, J.-y.; Ji, S. A method to predict hydroelastic responses of VLFS under waves and moving loads. Ocean Eng. 2022, 247, 110399. [Google Scholar] [CrossRef]
- Kashiwagi, M.; Kuga, S.; Chimoto, S. Time- and frequency-domain calculation methods for ship hydroelasticity with forward speed. In Proceedings of the 7th International Conference on Hydroelasticity in Marine Technology, Split, Croatia, 16–19 September 2015; pp. 477–492. [Google Scholar]
- Seng, S.; Jensen, J.J.; Malenica, S. Global hydroelastic model for springing and whipping based on a free-surface CFD code (OpenFOAM). Int. J. Nav. Archit. Ocean Eng. 2014, 6, 1024–1040. [Google Scholar] [CrossRef] [Green Version]
- Kumar Pal, S.; Iijima, K. Investigation of Springing Responses to High Harmonics of Wave Loads by Direct Coupling Between CFD and FEM. Volume 7: CFD and FSI. In Proceedings of the ASME 2022 41st International Conference on Ocean, Offshore and Arctic Engineering, Hamburg, Germany, 5–10 June 2022. [Google Scholar] [CrossRef]
- Kara, F. Time domain prediction of hydroelasticity of floating bodies. Appl. Ocean Res. 2015, 51, 1–13. [Google Scholar] [CrossRef]
- Debrabandere, F.; Tartinville, B.; Hirsch, C.; Coussement, G. Fluid-Structure Interaction Using a Modal Approach. J. Turbomach. 2012, 134, 51043. [Google Scholar] [CrossRef]
- Malenica, Š.; Molin, B.; Remy, F.; Senjanović, I. Hydroelastic response of a barge to impulsive and non-impulsive wave loads. In Proceedings of the 3rd International Conference on Hydroelasticity in Marine Technology, Oxford, UK, 15–17 September 2003; p. 9. [Google Scholar]
- Piro, D.J.; Maki, K.J. Whipping Response of a Box Barge in Oblique Seas. In Proceedings of the 28th International Workshop on Water Waves and Floating Bodies, Marseille, France, 7–10 April 2013; pp. 173–176. [Google Scholar]
- Bašić, J.; Degiuli, N.; Dejhalla, R. Total resistance prediction of an intact and damaged tanker with flooded tanks in calm water. Ocean Eng. 2017, 130, 83–91. [Google Scholar] [CrossRef]
- Andrun, M.; Blagojević, B.; Bašić, J. The influence of numerical parameters in the finite-volume method on the Wigley hull resistance. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2019, 233, 1123–1132. [Google Scholar] [CrossRef]
- Andrun, M.; Blagojević, B.; Bašić, J.; Klarin, B. Impact of CFD simulation parameters in prediction of ventilated flow on a surface-piercing hydrofoil. Ship Technol. Res. 2021, 68, 1–13. [Google Scholar] [CrossRef]
- De Boer, A.; van der Schoot, M.; Bijl, H. Mesh deformation based on radial basis function interpolation. Comput. Struct. 2007, 85, 784–795. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | Natural Frequency | Average Damping Ratio |
|---|---|---|
| 1 | 1.24 Hz | 7.3% |
| 2 | 2.40 Hz | 6.2% |
| Mode | Timoshenko | FEM, Mass Above Deck | Relative Difference | FEM, Figure 2 | Relative Difference |
|---|---|---|---|---|---|
| 1 | 1.367 Hz | 1.389 Hz | +1.6% | 1.295 Hz | −5.3% |
| 2 | 3.769 Hz | 3.823 Hz | +1.4% | 3.346 Hz | −11.2% |
| 3 | 7.389 Hz | 7.487 Hz | +1.3% | 5.900 Hz | −20.1% |
| Mode | Experiment | CFD, Segmented | Relative Difference | CFD, Monohull | Relative Difference | FEM, Monohull | Relative Difference |
|---|---|---|---|---|---|---|---|
| 1 | 1.24 Hz | 1.26 Hz | +1.6% | 1.12 Hz | −9.7% | 1.02 Hz | −17.7% |
| 2 | 2.40 Hz | 2.54 Hz | +5.8% | 2.33 Hz | −2.9% | 2.48 Hz | +3.3% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bašić, J.; Degiuli, N.; Malenica, Š. Insight into Hydrodynamic Damping of a Segmented Barge Using Numerical Free-Decay Tests. J. Mar. Sci. Eng. 2023, 11, 581. https://doi.org/10.3390/jmse11030581
Bašić J, Degiuli N, Malenica Š. Insight into Hydrodynamic Damping of a Segmented Barge Using Numerical Free-Decay Tests. Journal of Marine Science and Engineering. 2023; 11(3):581. https://doi.org/10.3390/jmse11030581
Chicago/Turabian StyleBašić, Josip, Nastia Degiuli, and Šime Malenica. 2023. "Insight into Hydrodynamic Damping of a Segmented Barge Using Numerical Free-Decay Tests" Journal of Marine Science and Engineering 11, no. 3: 581. https://doi.org/10.3390/jmse11030581