
Effect of Composite Bionic Micro-Texture on Bearing Lubrication and Cavitation Characteristics of Slipper Pair
 ,
,
Abstract
:1. Introduction
2. Research Model and Method
2.1. Establishment of Simulation Model
2.2. Meshing
2.3. Boundary Conditions Setting
2.4. Verification of Calculation Method
2.5. Design of Orthogonal Test
3. Analysis of Simulation Results
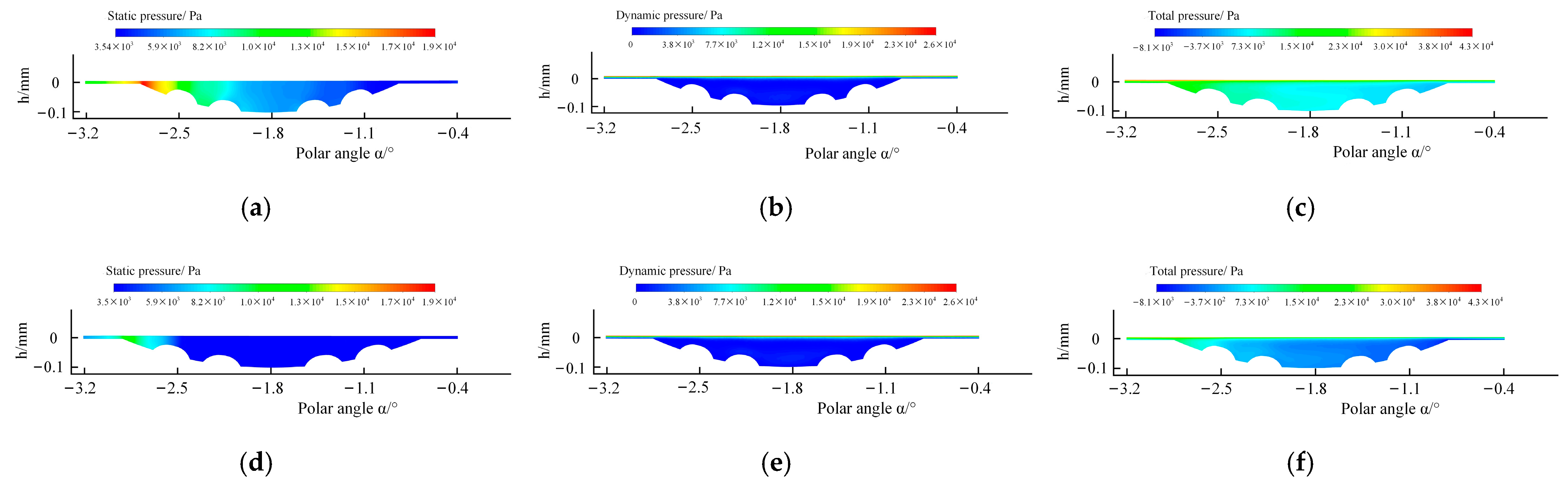
3.1. Effect of Cavitation on Surface Pressure of the Water Film
3.2. Effect of Cavitation on Water Film Bearing Force
3.3. Analysis of Orthogonal Test Results
4. Conclusions
- (1)
- When seawater enters the divergence wedge of the circular pit, the static pressure decreases; when the convergence wedge flows out, the static pressure increases. The maximum dynamic pressure appears in the water film part. The divergent wedge of the circular pit can generate a low-pressure zone. Due to the pressure difference, the upper surface of the water film has a bearing capacity, so introducing the cavitation effect can improve the bearing lubrication characteristics of the water film of the slipper pair. The vapor volume fraction behind the crater is the largest, and there is a high probability of cavitation.
- (2)
- Introducing the cavitation effect can improve the static pressure value and total pressure value of the water film. Although the dynamic pressure value is slightly reduced, the total pressure bearing force of the water film with the cavitation effect is significantly improved compared with the total pressure carrying force of the water film without the cavitation effect. Among them, the total pressure bearing force of the 5th test group increased by about 90% after introducing the cavitation effect, and the total pressure bearing force of the 17th test group increased by about 86.9% compared with the 16th test group and the 18th test group at the same speed. Through the summary and analysis of these two test groups, the optimal second-stage composite structure size is obtained.
- (3)
- Rotational speed is the first test factor affecting bearing force. The influence of the test factors is as follows: rotational speed > first-stage aspect ratio > first-stage diameter > second-stage aspect ratio > area ratio > second-stage diameter > distribution angle. And the optimal combination is A6B2C1D3E3F2G3.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, Y.; Wu, D.; Li, D. Applications and research progress of hydraulic technology in deep sea. J. Mech. Eng. 2018, 54, 14–23. [Google Scholar] [CrossRef]
- Guo, X.; Xing, T.; Ruan, J. Industrial application and new progress of hydraulic technology. Chin. High Technol. Lett. 2020, 30, 644–654. [Google Scholar]
- Wang, W.; Wen, H.; Chen, W. Research status on tribological behaviors of materials under seawater environment. Mater. Rep. 2017, 31, 51–58. [Google Scholar]
- Chen, B.; Wang, J.; Yan, F. Comparative investigation on the tribological behaviors of CF/PEEK composites under sea water lubrication. Tribol. Int. 2012, 52, 170–177. [Google Scholar] [CrossRef]
- Yang, Y.; Yankey, R.; Li, H. Research on the Friction Pairs in Water Hydraulic Piston Pumps. J. Phys. Conf. Ser. 2022, 2218, 012067. [Google Scholar] [CrossRef]
- Gachot, C.; Rosenkranz, A.; Hsu, S.M.; Costa, H.L. A critical assessment of surface texturing for friction and wear improvement. Wear 2017, 372–373, 21–41. [Google Scholar] [CrossRef]
- Wang, Z.; Ye, R.; Xiang, J. The performance of textured surface in friction reducing: A review. Tribol. Int. 2023, 177, 108010. [Google Scholar] [CrossRef]
- Mohammad, A.; Dinesh, K.S.; Saurabh, K.; Nitin, S. Implication of Surface Texture and Slip on Hydrodynamic Fluid Film Bearings: A Comprehensive Survey: Review. Tribol. Online 2020, 15, 265–282. [Google Scholar]
- Philipp, G.G.; Francisco, J.P.; Andreas, R. Multi-Scale Surface Texturing in Tribology—Current Knowledge and Future Perspectives. Lubricants 2019, 7, 95. [Google Scholar]
- Kovalchenko, A.M.; Erdemir, A.; Ajayi, O.O.; Etsion, I. Tribological Behavior of Oil-Lubricated Laser Textured Steel Surfaces in Conformal Flat and Non-Conformal Contacts. Mater. Perform. Charact. 2017, 6, 1–23. [Google Scholar] [CrossRef]
- Codrignani, A.; Frohnapfel, B.; Magagnato, F.; Schreiber, P.; Schneider, J.; Gumbsch, P. Numerical and experimental investigation of texture shape and position in the macroscopic contact. Tribol. Int. 2018, 122, 46–57. [Google Scholar] [CrossRef]
- Liu, W.; Ni, H.; Chen, H.; Wang, P. Numerical simulation and experimental investigation on tribological performance of micro-dimples textured surface under hydrodynamic lubrication. Int. J. Mech. Sci. 2019, 163, 105095. [Google Scholar] [CrossRef]
- Braun, D.; Greiner, C.; Schneider, J.; Gumbsch, P. Efficiency of laser surface texturing in the reduction of friction under mixed lubrication. Tribol. Int. 2014, 77, 142–147. [Google Scholar] [CrossRef]
- Wang, Z.; Fu, Q.; Wood, R.; Wu, J.; Wang, S. Influence of bionic non-smooth surface texture on tribological characteristics of carbon-fiber-reinforced polyetheretherketone under seawater lubrication. Tribol. Int. 2019, 144, 106100. [Google Scholar] [CrossRef]
- Wang, Z.; He, H.; Wu, S.; Xiang, J.; Ni, J. Effect of surface topography and wettability on friction properties of CFRPEEK. Tribol. Int. 2022, 171, 107573. [Google Scholar] [CrossRef]
- Hamilton, D.B.; Walowit, J.A.; Allen, C.M. A theory of lubrication by micro-irregularities. Fluids Eng. 1966, 88, 177–185. [Google Scholar]
- Dowson, D.; Taylor, C.M. Cavitation in bearings. Annu. Rev. Fluid Mech. 1979, 11, 35–65. [Google Scholar] [CrossRef]
- Cao, S.; Tang, P.; Xu, J. The Influence of slip velocity on the cavitation effect of surface texture. Mach. Tool Hydraul. 2017, 45, 37–40. [Google Scholar]
- Wang, L.; Guo, S.; Yin, G. Research on micro-textured journal bearing characteristics considering the effect of cavitation. Lubr. Eng. 2018, 43, 65–69. [Google Scholar]
- Fang, X.; Yan, Z.; Wang, J. Effect of micro-convex texture on lubrication performance of friction pair considering cavitation phenomenon. Lubr. Eng. 2020, 45, 32–41. [Google Scholar]
- Caramia, G.; Carbone, G.; De Palma, P. Hydrodynamic lubrication of micro-textured surfaces: Two dimensional CFD-analysis. Tribol. Int. 2015, 88, 162–169. [Google Scholar] [CrossRef]
- Gropper, D.; Wang, L.; Harvey, T.J. Hydrodynamic lubrication of textured surfaces: A review of modeling techniques and key findings. Tribol. Int. 2016, 94, 509–529. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; Zhang, H.; Liu, Q. Research on load carrying capacity of multi-phase flow water film of hybrid bearing based on CFD method. Lubr. Eng. 2017, 42, 79–83. [Google Scholar]
- Barthlott, W.; Neinhuis, C. Purity of the sacred lotus, or escape from contamination in biological surfaces. Planta 1997, 202, 1–8. [Google Scholar] [CrossRef]
- Liang, Y. Research on Lubrication and Drag Reduction Mechanism and Friction and Wear of Slipper Pair with Bionic Non-Smooth Surface in Seawater Axial Piston Pump. Ph.D. Thesis, Yanshan University, Qinhuangdao, China, 2017. [Google Scholar]
- Bai, S.; Peng, X.; Li, Y.; Sheng, S. Gas Lubrication Analysis Method of Step-Dimpled Face Mechanical Seals. J. Tribol. 2012, 134, 011702. [Google Scholar] [CrossRef]
- Wang, H.; Song, Y.; Song, Y. Flow distribution simulation about slipper pair of hydraulic axial ram pump. J. Syst. Simul. 2015, 27, 634–642. [Google Scholar]
- Zhang, J.; Ma, Q.; Sun, S. Simulation of sliding boots vices in axial piston pump based on CFD. New Technol. New Process 2012, 8, 1–3. [Google Scholar]
- ZeinEldin, R.A.; Ullah, A.; Khalifa, H.A.E.-W.; Ayaz, M. Analytical Study of the Energy Loss Reduction during Three-Dimensional Engine Oil-Based Hybrid Nanofluid Flow by Using Cattaneo–Christov Model. Symmetry 2023, 15, 166. [Google Scholar] [CrossRef]
- Yan, W. Selection and application of three multiphase flow models based on FLUENT. Yunnan Chem. Technol. 2020, 47, 43–44. [Google Scholar]
- Chen, D.; Wan, Y.; Cai, Y. Friction Simulation Analysis of Hydraulic Valve Core by Multiphase Flow Based on Fluent. Mach. Tool Hydraul. 2016, 44, 134–139. [Google Scholar]
- Pan, L.; Wang, Q.; He, Z. Practical Multiphase Flow Numerical Simulation—ANSYS Fluent Multiphase Flow Model and Its Engineering Application, 1st ed.; Science Press: Beijing, China, 2020; pp. 20–22. [Google Scholar]
- Alharbi, K.A.M.; Ullah, A.; Ikramullah; Fatima, N.; Khan, R.; Sohail, M.; Khan, S.; Khan, W.; Ali, F. Impact of viscous dissipation and coriolis effects in heat and mass transfer analysis of the 3D non-Newtonian fluid flow. Case Stud. Therm. Eng. 2022, 37, 102289. [Google Scholar] [CrossRef]
- Shah, Z.; Ullah, A.; Musa, A.; Vrinceanu, N.; Ferrandiz, B.S.; Iqbal, S.; Deebani, W. Entropy Optimization and Thermal Behavior of a Porous System With Considering Hybrid Nanofluid. Front. Phys. 2022, 10, 509. [Google Scholar] [CrossRef]
- He, W.; Xue, W.; Tang, B. Optimized Test Design Method and Data Analysis, 1st ed.; Chemical Industry Press: Beijing, China, 2012; pp. 1–10. [Google Scholar]
- Zhu, H. Cavitation and cavitation erosion and their application. Yunnan Chem. Technol. 2020, 47, 20–23. [Google Scholar]
- Liang, Y.; Gao, D.; Wu, S. Hydrodynamic lubrication calculation for slipper/swash plate pair with bionic non-smooth concave surface. J. Mech. Eng. 2015, 51, 153–160. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Number | Test Factors | ||||||
|---|---|---|---|---|---|---|---|
| A Rotational Speed n/(r/min) | B First-Stage Diameter d1/mm | C First-Stage Aspect Ratio δ1 | D Second-Stage Diameter d2/mm | E Second-Stage Aspect Ratio δ2 | F Area Ratio S/% | G Distribution Angle θ/° | |
| 1 | 1 (1000) | 1 (0.7) | 1 (0.1) | 1 (0.07) | 1 (0.1) | 1 (10) | 1 (0) |
| 2 | 1 | 2 (1.0) | 2 (0.3) | 2 (0.1) | 2 (0.3) | 2 (20) | 2 (1.8) |
| 3 | 1 | 3 (1.3) | 3 (0.5) | 3 (0.13) | 3 (0.5) | 3 (30) | 3 (2.7) |
| 4 | 2 (1250) | 1 | 1 | 2 | 2 | 3 | 3 |
| 5 | 2 | 2 | 2 | 3 | 3 | 1 | 1 |
| 6 | 2 | 3 | 3 | 1 | 1 | 2 | 2 |
| 7 | 3 (1500) | 1 | 2 | 1 | 3 | 2 | 3 |
| 8 | 3 | 2 | 3 | 2 | 1 | 3 | 1 |
| 9 | 3 | 3 | 1 | 3 | 2 | 1 | 2 |
| 10 | 4 (1750) | 1 | 3 | 3 | 2 | 2 | 1 |
| 11 | 4 | 2 | 1 | 1 | 3 | 3 | 2 |
| 12 | 4 | 3 | 2 | 2 | 1 | 1 | 3 |
| 13 | 5 (2000) | 1 | 2 | 3 | 1 | 3 | 2 |
| 14 | 5 | 2 | 3 | 1 | 2 | 1 | 3 |
| 15 | 5 | 3 | 1 | 2 | 3 | 2 | 1 |
| 16 | 6 (2250) | 1 | 3 | 2 | 3 | 1 | 2 |
| 17 | 6 | 2 | 1 | 3 | 1 | 2 | 3 |
| 18 | 6 | 3 | 2 | 1 | 2 | 3 | 1 |
| Sum of Bearing Force | E1 | E3 |
|---|---|---|
| With cavitation effect | 2.982 N | 2.991 N |
| Without cavitation effect | 2.427 N | 2.418 N |
| Type | Priority | Optimal Combination |
|---|---|---|
| With cavitation effect | C > B > E > F > D > G | B2C1D3E3F2G3 |
| Without cavitation effect | C > B > E > F > G > D | B2C1D3E1F2G3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, Y.; Wang, C.; Wang, W.; Xing, H.; Zhang, Z.; Gao, D. Effect of Composite Bionic Micro-Texture on Bearing Lubrication and Cavitation Characteristics of Slipper Pair. J. Mar. Sci. Eng. 2023, 11, 582. https://doi.org/10.3390/jmse11030582
Liang Y, Wang C, Wang W, Xing H, Zhang Z, Gao D. Effect of Composite Bionic Micro-Texture on Bearing Lubrication and Cavitation Characteristics of Slipper Pair. Journal of Marine Science and Engineering. 2023; 11(3):582. https://doi.org/10.3390/jmse11030582
Chicago/Turabian StyleLiang, Yingna, Cunyuan Wang, Wei Wang, Hao Xing, Zhepeng Zhang, and Dianrong Gao. 2023. "Effect of Composite Bionic Micro-Texture on Bearing Lubrication and Cavitation Characteristics of Slipper Pair" Journal of Marine Science and Engineering 11, no. 3: 582. https://doi.org/10.3390/jmse11030582