
A Novel Short-Term Ship Motion Prediction Algorithm Based on EMD and Adaptive PSO–LSTM with the Sliding Window Approach


Abstract
:1. Introduction
- Due to having less generalization ability, a single neural network encounters the problems of over-fitting, vanishing gradients, and network training explosions when faced with the complex patterns in a ship’s motion dataset.
- When dealing with huge datasets, simple neural network models may become unstable and have low efficiency.
- To complete the short-term prediction, a few seconds of ship motion attitude data are derived by the proposed model.
- The sliding window technique is introduced to turn time series predictions into supervised learning for ML methods. Each window is utilized to train and update the model. After each computation is completed, the window shifts to a new position by one step.
- Because of the nonstationary characteristics of time-series data, the prediction accuracy is affected by the unstable mean and variance of datasets. Therefore, to obtain better prediction results, the present work needs to use a data pre-processing method to reduce the effect of nonstationary characteristics.
- Considering the practicality of predictive models, the proposed model needs to guarantee high-accuracy results when faced with multi-step-ahead predictions.
2. Basic Knowledge
2.1. Empirical Mode Decomposition Method
- Find all maximum and minimum points of the time series and then fit a curve with a cubic spline function to obtain the upper and lower envelope of , which can be represented, respectively, as and .
- Calculate the average of and to obtain the mean envelope , which is shown as Equation (1):
- New time series can be calculated as
- Judge if is satisfied with the condition of IMFs. Repeat Steps (1), (2), and (3) if it is not satisfied until the mean envelope tends to zero. Then, the first intrinsic modal function is obtained.
- By subtracting from the original time series , the new time series without high frequency is derived.
- By repeating the above process, the intrinsic modal function is obtained. When the cannot be decomposed, it is represented as the residual of .
2.2. Sliding Window Approach
3. Short-Term Ship Motion Prediction Algorithm based on EMD and Adaptive PSO–LSTM
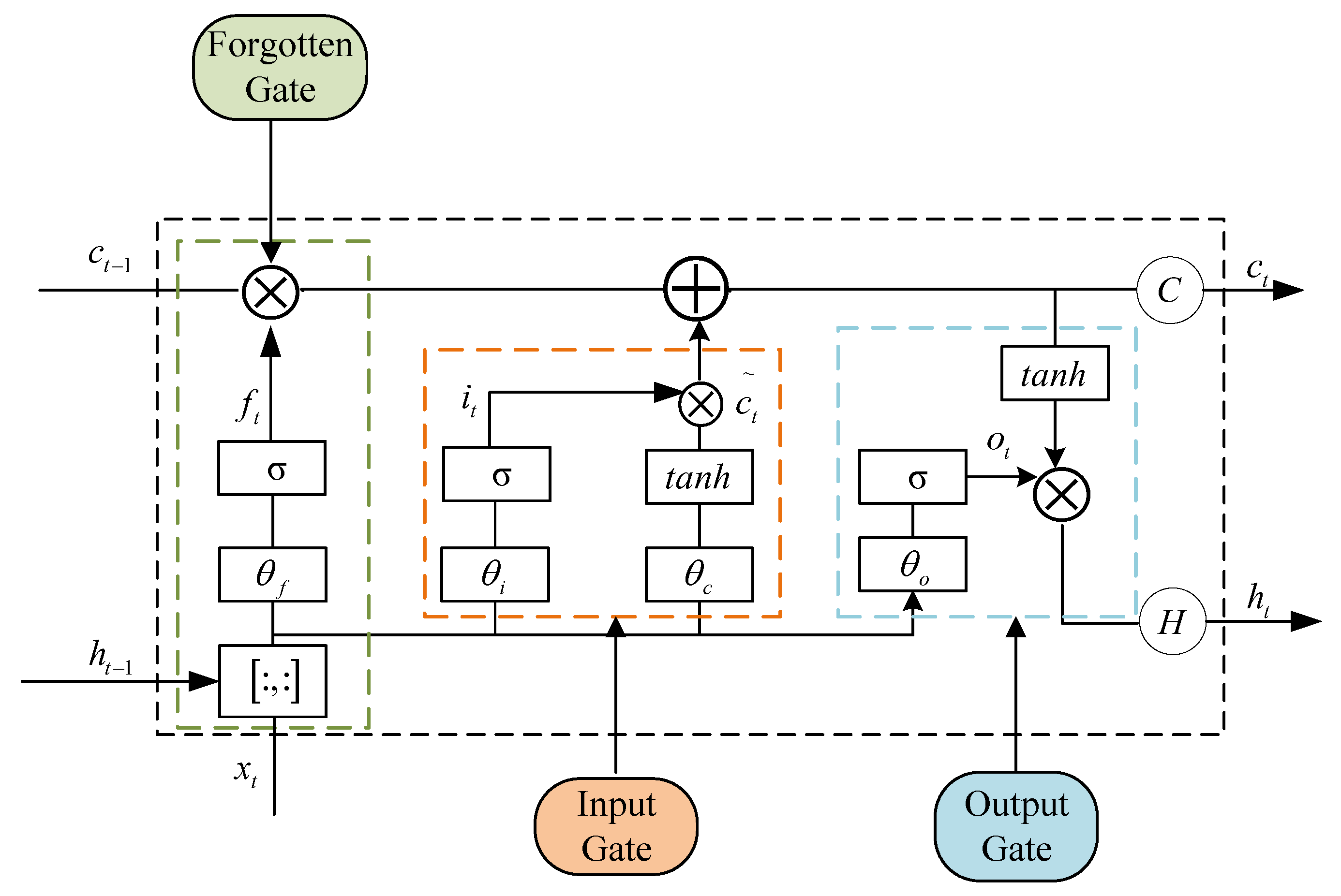
3.1. LSTM Neural Network Parameter Optimization for Ship Attitude Prediction
- Preprocess the ship historical movement data.
- Initialize the particle swarm parameters, including the determination of the population size, number of iterations, learning factors, and limited intervals for particle position and velocity.
- Initialize the LSTM network structure, which refers to the determination of the number of neurons in each layer of the network and the number of hidden layers. It also divides the data into training samples, validation samples, and test samples.
- Determine the fitness function and select the optimal particle fitness value by calculating and comparing the fitness value of each particle. The fitness value of population individuals with LSTM model parameters is defined as Equation (12).where M and N represent the number of training samples and verification samples, respectively; and represent the true value and the prediction value of the training sample, respectively; and represent the true value and the prediction value of verification samples, respectively.
- Calculate and evaluate the particle fitness value according to the difference of the particle fitness value. The global optimal position and the local optimal position of the particle are both determined.
- Update the velocity and position of the particles based on Equations (9) and (10).
- Determine whether the particles meet the conditions for the iteration termination. If the maximum number of iterations is reached, the optimal parameters are assigned to the LSTM, and the training is performed and outputs the short-term ship motion prediction value. Otherwise, it returns to Step 5 to continue execution until the termination condition is met.
- The optimal results obtained are assigned to the connection weights of the LSTM network, and this prediction model is trained to output the optimal solution for time series prediction.
3.2. EMD–LSTM Model Based on Sliding Window Approach
- Decompose the raw ship motion sequence into multiple specific subsequences by utilizing the EMD algorithm.
- Divide the dataset into the training set and the testing set and predict each sub-model component separately with a sliding window and optimized LSTM neural network.
- Weight and reconstruct the prediction of each sub-model to obtain the final prediction results.
4. Experiment Results and Analysis
4.1. Experiment Design and Parameter Settings
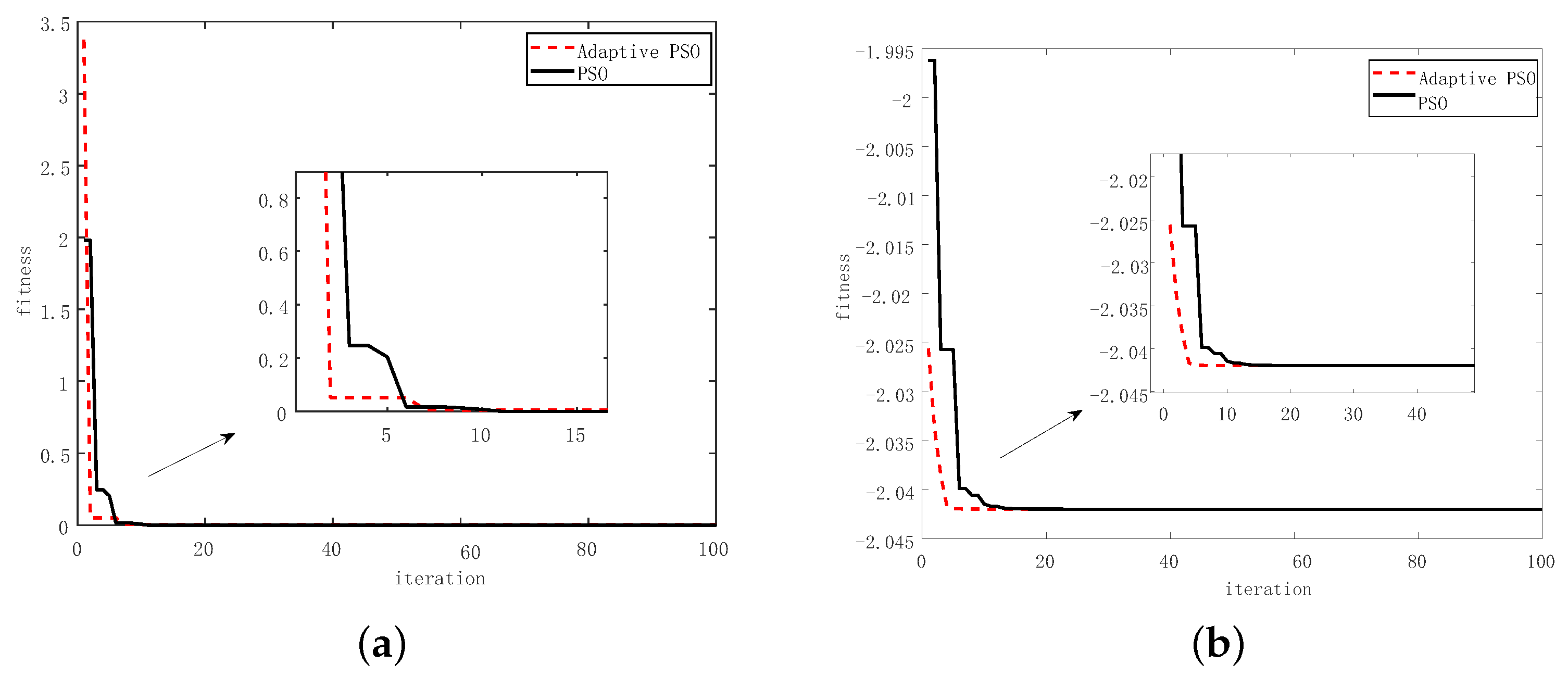
4.2. Prediction Performance Evaluation of Adaptive PSO Algorithm and Hybrid Model
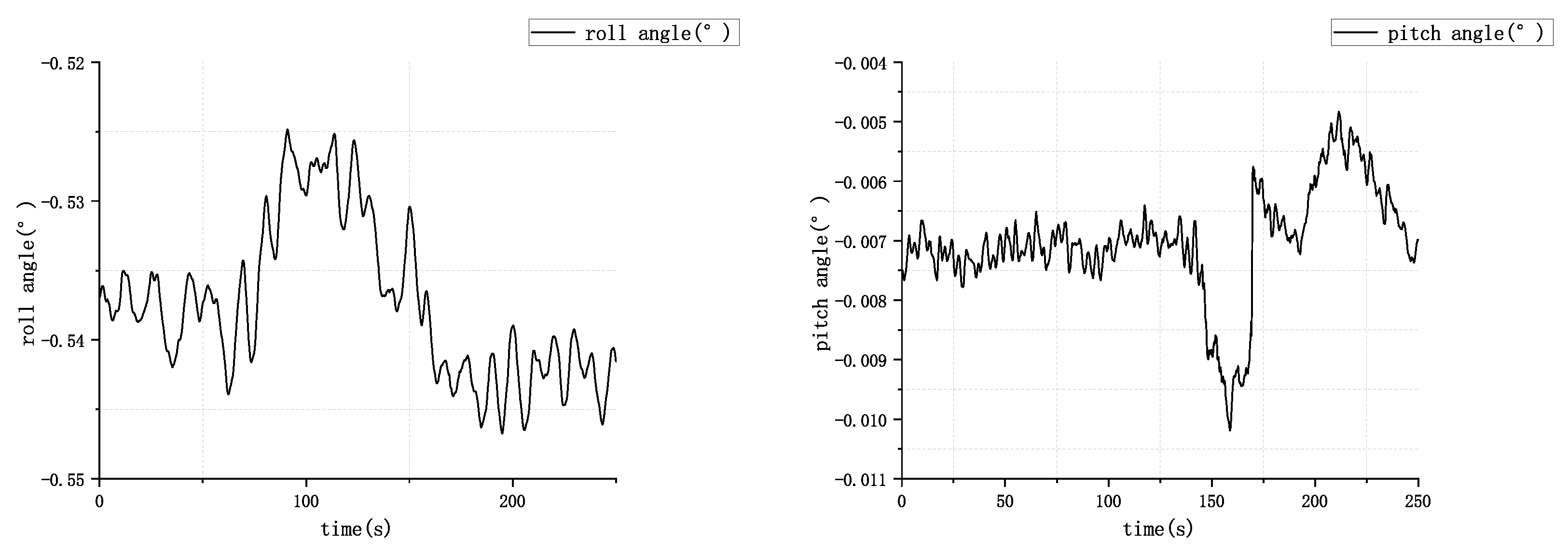
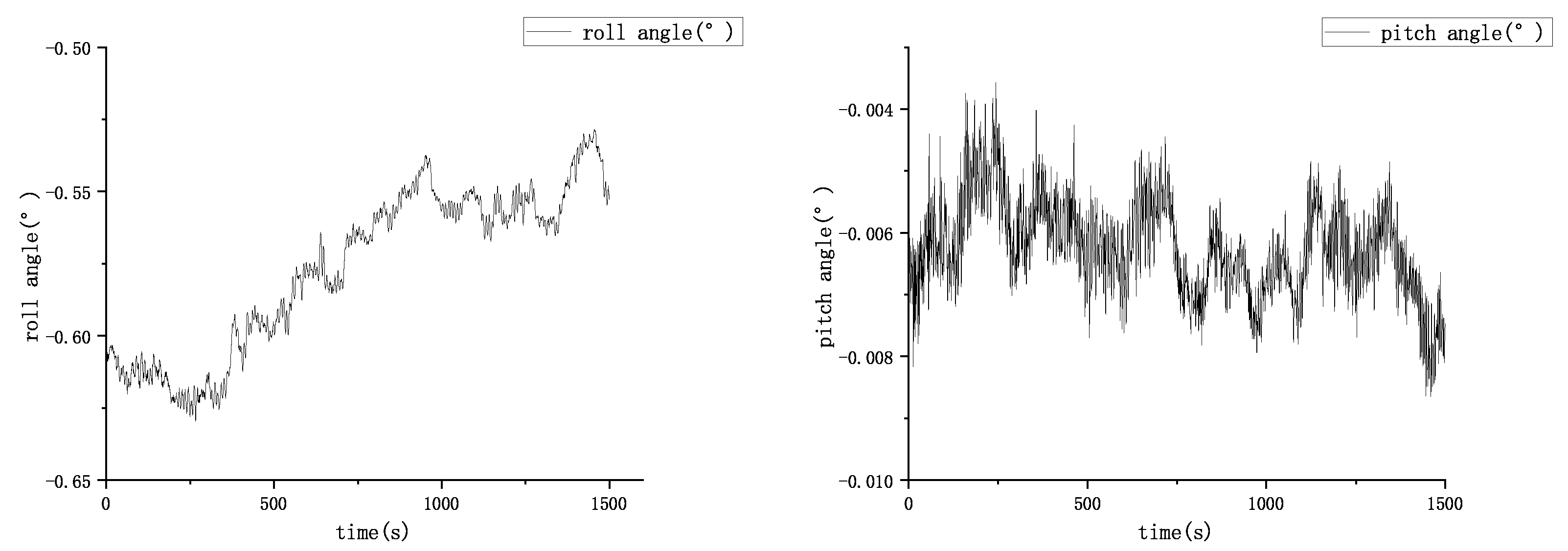
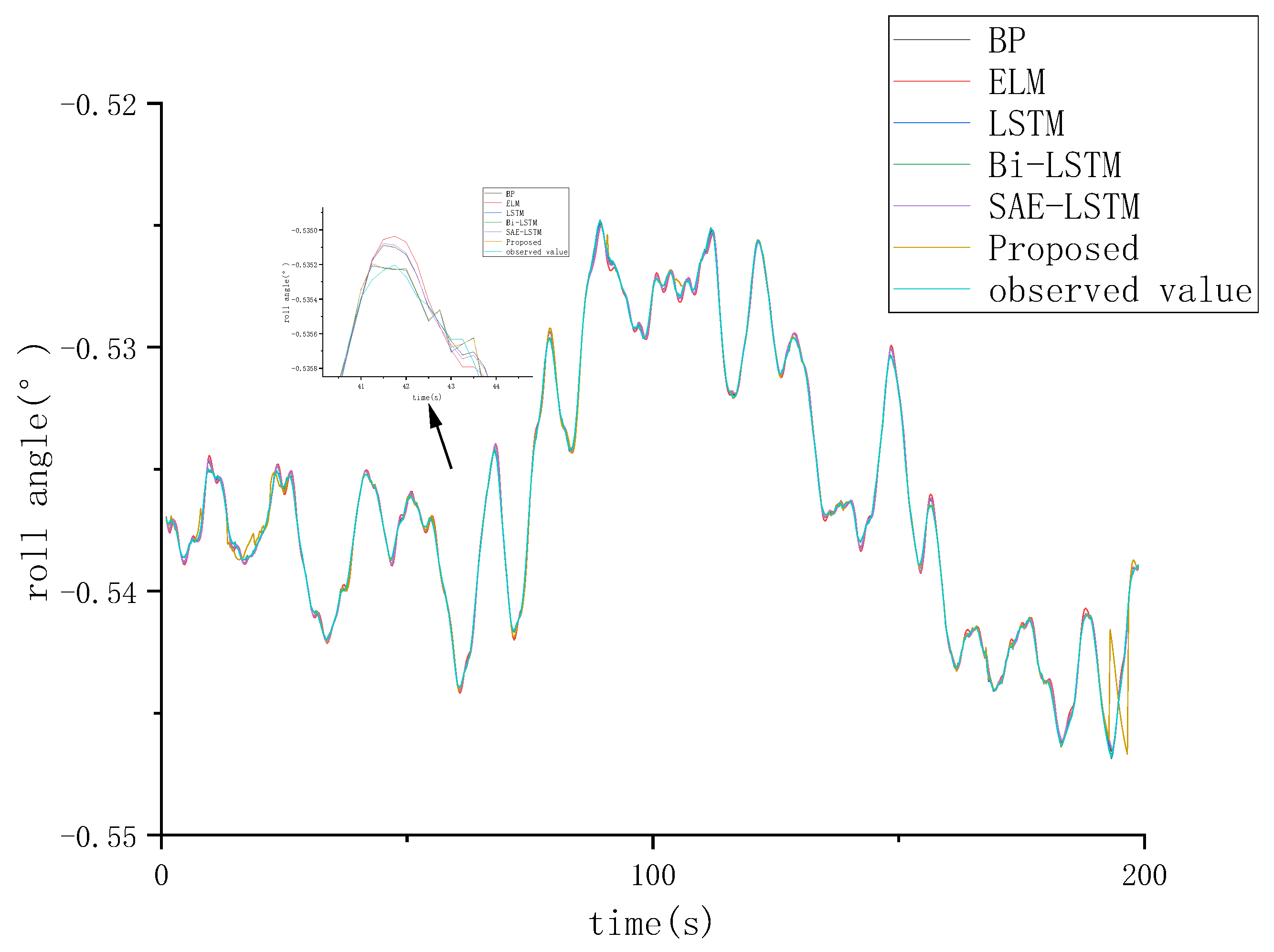
4.3. Roll Angle Prediction Results and Analysis
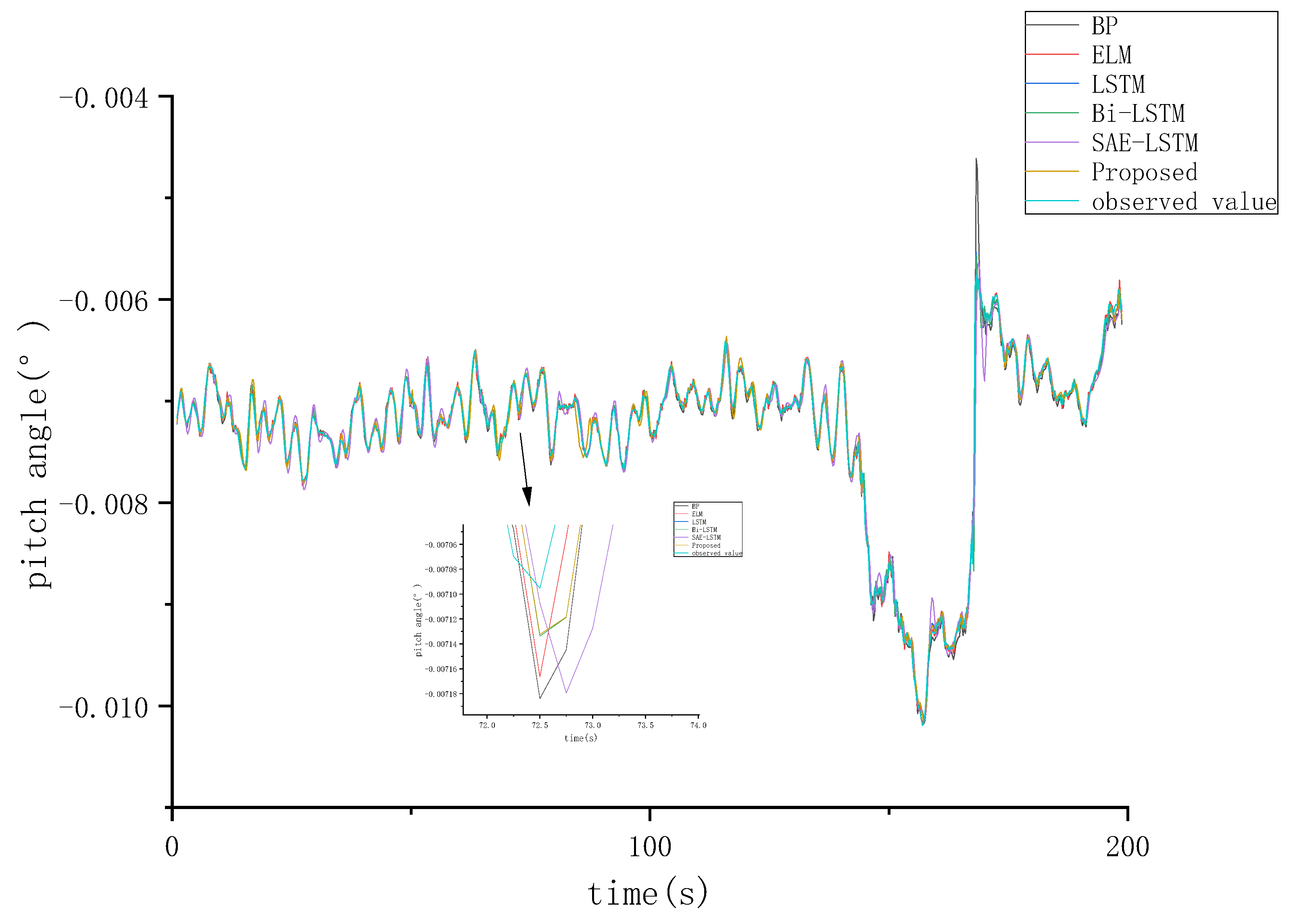
4.4. Pitching Angle Prediction Results and Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tang, G.; Wu, Y.; Li, C.; Wong, P.K.; Xiao, Z.; An, X. A novel wind speed interval prediction based on error prediction method. IEEE Trans. Ind. Inform. 2020, 16, 6806–6815. [Google Scholar] [CrossRef]
- Ali, M.; Prasad, R. Significant wave height forecasting via an extreme learning machine model integrated with improved complete ensemble empirical mode decomposition. Renew. Sustain. Energy Rev. 2019, 104, 281–295. [Google Scholar] [CrossRef]
- Wang, Z.; Zou, Z.; Soares, C.G. Identification of ship manoeuvring motion based on nu-support vector machine. Ocean Eng. 2019, 183, 270–281. [Google Scholar] [CrossRef]
- Wei, W.W.S. Time series analysis. In The Oxford Handbook of Quantitative Methods in Psychology; Oxford Library: Oxford, UK, 2006; Volume 2. [Google Scholar]
- Majnarić, D.; Šegota, S.B.; Lorencin, I.; Car, Z. Prediction of main particulars of container ships using artificial intelligence algorithms. Ocean Eng. 2022, 265, 112571. [Google Scholar] [CrossRef]
- Kumari, P.; Toshniwal, D. Long short term memory–Convolutional neural network based deep hybrid approach for solar irradiance forecasting. Appl. Energy 2021, 295, 117061. [Google Scholar] [CrossRef]
- Sarıca, B.; Eğrioxgxlu, E.; Barış, A. A new hybrid method for time series forecasting: Ar–anfis. Neural Comput. Appl. 2018, 29, 749–760. [Google Scholar] [CrossRef]
- Khan, A.; Bil, C.; Marion, K.E. Ship motion prediction for launch and recovery of air vehicles. In Proceedings of the OCEANS 2005 MTS/IEEE, Washington, DC, USA, 17–23 September 2005; pp. 2795–2801. [Google Scholar]
- Kaplan, P. A study of prediction techniques for aircraft carrier motions at sea. J. Hydronautics 1969, 3, 121–131. [Google Scholar] [CrossRef]
- Fossen, T.I.; Perez, T. Kalman filtering for positioning and heading control of ships and offshore rigs. Control. Syst. IEEE 2009, 29, 32–46. [Google Scholar]
- Wang, W.; Chau, K.; Xu, D.; Chen, X. Improving forecasting accuracy of annual runoff time series using arima based on eemd decomposition. Water Resour. Manag. 2015, 29, 2655–2675. [Google Scholar] [CrossRef]
- ElMoaqet, H.; Tilbury, D.M.; Ramachandran, S.K. Ramachandran. Multi-step ahead predictions for critical levels in physiological time series. IEEE Trans. Cybern. 2016, 46, 1704–1714. [Google Scholar] [CrossRef]
- Liu, X.M.; Zhang, Y.Y.; Feng, X.Y.; Wang, Q.X. A novel method for hull’s three dimensional deformation measurement. Appl. Mech. Mater. Trans. Technol. Publ. 2013, 344, 93–98. [Google Scholar] [CrossRef]
- Xu, D.; Wang, Y.; Peng, P.; Beilun, S.; Deng, Z.; Guo, H. Real-time road traffic state prediction based on kernel-knn. Transportmetrica 2020, 16, 104–118. [Google Scholar] [CrossRef]
- Xiao, X.; Duan, H.; Wen, J. A novel car-following inertia grey model and its application in forecasting short-term traffic flow. Appl. Math.l Modell. 2020, 87, 546–570. [Google Scholar] [CrossRef]
- Yang, Y.; Tu, H.; Song, L.; Chen, L.; Xie, D.; Sun, J. Research on accurate prediction of the container ship resistance by rbfnn and other machine learning algorithms. J. Mar. Sci. Eng. 2021, 9, 376. [Google Scholar] [CrossRef]
- Sun, Q.; Tian, Y.; Diao, M. Cooperative localization algorithm based on hybrid topology architecture for multiple mobile robot system. IEEE Internet Things J. 2018, 2018, 1. [Google Scholar] [CrossRef]
- Sun, Q.; Tang, Z.; Gao, J.; Zhang, G. Short-term ship motion attitude prediction based on lstm and gpr. Appl. Ocean Res. 2022, 118, 118. [Google Scholar] [CrossRef]
- Ye, F.; Chen, J.; Tian, Y.; Jiang, T. Cooperative multiple task assignment of heterogeneous uavs using a modified genetic algorithm with multi-type-gene chromosome encoding strategy. J. Intell. Robot. Syst. 2020, 100, 1–13. [Google Scholar] [CrossRef]
- Babu, C.N.; Reddy, B.E. A moving-average filter based hybrid arima–ann model for forecasting time series data. Appl. Soft Comput. 2014, 23, 27–38. [Google Scholar] [CrossRef]
- Moreira, L.; Soares, C.G. Simulating ship manoeuvrability with artificial neural networks trained by a short noisy data set. J. Mar. Sci. Eng. 2023, 11, 1. [Google Scholar] [CrossRef]
- Li, J.; Dai, Q.; Ye, R. A novel double incremental learning algorithm for time series prediction. Neural Comput. Appl. 2019, 31, 6055–6077. [Google Scholar] [CrossRef]
- Dai, X.; Sheng, K.; Shu, F. Ship power load forecasting based on pso-svm. Math. Biosci. Eng. 2022, 19, 4547–4567. [Google Scholar] [CrossRef] [PubMed]
- Saha, A.; Basu, S.; Datta, A. Random forests for spatially dependent data. J. Am. Stat. Assoc. 2021, 1–19. [Google Scholar] [CrossRef]
- Liu, H.; Tian, H.; Chen, C.; Li, Y. An experimental investigation of two wavelet-mlp hybrid frameworks for wind speed prediction using ga and pso optimization. Int. J. Electr. Power Energy Syst. 2013, 52, 161–173. [Google Scholar] [CrossRef]
- Atiquzzaman, M.; Kandasamy, J. Robustness of extreme learning machine in the prediction of hydrological flow series. Comput. Geosci. 2018, 120, 105–114. [Google Scholar] [CrossRef]
- Wang, H.; Liu, X.; Song, P.; Tu, X. Sensitive time series prediction using extreme learning machine. Int. J. Mach. Learn. Cybern. 2019, 10, 3371–3386. [Google Scholar] [CrossRef]
- Huang, G.; Zhu, Q.; Siew, C. Extreme learning machine: Theory and applications. Neurocomputing 2006, 70, 489–501. [Google Scholar] [CrossRef]
- Mahdi, K.; Wang, J. Spatio-temporal graph deep neural network for short-term wind speed forecasting. IEEE Trans. Sustain. Energy 2018, 2, 1. [Google Scholar]
- Qin, S.-Q.; De, J.; Wu, W. A hybrid ar-dwt-emd model for the short-term prediction of nonlinear and nonstationary ship motion. In Proceedings of the IEEE 2016 Chinese Control and Decision Conference (CCDC), Yinchuan, China, 28–30 May 2016; pp. 4042–4047. [Google Scholar]
- Veltcheva, A.; Soares, C.G. Analysis of wave-induced vertical ship responses by hilbert-huang transform method. Ocean Eng. 2023, 269, 113533. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, H.; Zou, D.; Fu, H. Ship roll prediction algorithm based on bi-lstm-tpa combined model. J. Mar. Sci. Eng. 2021, 9, 387. [Google Scholar] [CrossRef]
- El Said, A.; El Jamiy, F.; Higgins, J.; Wild, B.; Desell, T. Optimizing long short-term memory recurrent neural networks using ant colony optimization to predict turbine engine vibration. Appl. Soft Comput. 2018, 73, 969–991. [Google Scholar] [CrossRef] [Green Version]
- Peng, X.; Zhang, B.; Zhou, H. An improved particle swarm optimization algorithm applied to long short-term memory neural network for ship motion attitude prediction. Trans. Inst. Meas. Control. 2019, 41, 4462–4471. [Google Scholar] [CrossRef]
- Qian, L.; Wang, W.; Chen, G.; Yu, M. A fetal electrocardiogram signal extraction method based on long short term memory network optimized by genetic algorithm. J. Biomed. Eng. 2021, 38, 257–267. [Google Scholar]
- Yin, J.; Wang, N.; Perakis, A.N. A real-time sequential ship roll prediction scheme based on adaptive sliding data window. IEEE Trans. Syst. Man Cybern. Syst. 2017, 48, 2115–2125. [Google Scholar] [CrossRef]
- Yao, Y.; Han, L.; Wang, J. Lstm-pso: Long short-term memory ship motion prediction based on particle swarm optimization. In Proceedings of the 2018 IEEE CSAA Guidance, Navigation and Control Conference (CGNCC), Xiamen, China, 10–12 August 2018; pp. 1–5. [Google Scholar]
- Nie, Z.; Yuan, Y.; Xu, D.; Shen, F. Research on support vector regression model based on different kernels for short-term prediction of ship motion. In Proceedings of the IEEE 2019 12th International Symposium on Computational Intelligence and Design (ISCID), Hangzhou, China, 14–15 December 2019; Volume 1, pp. 61–64. [Google Scholar]
- Zhang, Z.; Yin, J.; Hu, J.; Liu, C. Ship rolling motion prediction and analysis based on grey pso-anfis model. Sci. Technol. Eng. 2016, 16, 124–129. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | The Start Time of Record Data | Duration (s) | Roll Angle (°) | Pitch Angle (°) | ||||
|---|---|---|---|---|---|---|---|---|
| Average Value | Maximum Value | Minimum Value | Average Value | Maximum Value | Minimum Value | |||
| #1 | 20 December 2014 12:10:21.000 | 250 | −0.543618911 | −0.530798 | −0.553233 | −0.00710956 | −0.004698 | −0.010346 |
| #2 | 20 December 2014 16:30:59:000 | 250 | −0.560047567 | −0.543898 | −0.579896 | −0.006100966 | −0.004592 | −0.007791 |
| #3 | 20 December 2014 12:30:00:000 | 1500 | −0.621413551 | −0.534555 | −0.636779 | −0.006321536 | −0.003541 | −0.00883 |
| #4 | 11 March 2015 12:48:22:250 | 300 | 0.729984617 | 8.2649 | −6.5716 | −0.04718685 | 0.8845 | −0.9738 |
| #5 | 19 April 2016 16:12:56:027 | 300 | 0.437897983 | 1.6867 | −1.2942 | −0.738008183 | −0.3692 | −1.1086 |
| Name | Test Function Expression |
|---|---|
| Rosenbrock | |
| Griewank |
| Model | Parameters | Values |
|---|---|---|
| BP | Number of Hidden Neurons | 10 |
| ELM | Transfer Function | sine function |
| Number of Hidden Neurons | 10 | |
| LSTM | Hidden Units | 10 |
| MaxEpochs | 250 | |
| Initial learning rate | 0.01 | |
| numFeatures | 1 | |
| numResponse | 1 | |
| droprate | 0.2 | |
| activation function | sigmoid, tanh | |
| MiniBatchSize | 128 | |
| Optimizer | Adam | |
| Bi-LSTM | Number of Hidden Neurons | 10 |
| Activation function | sigmoid, tanh | |
| SAE-LSTM | SparsityProportion | 0.6 |
| Number of Hidden Neurons | 10 | |
| Proposed | EMD decomposition | 7Imfs + res.(take roll angle in dataset1 as an example) |
| Sliding window length | 10 | |
| LSTM layer | the same as LSTM model |
| Method | MAE () | MAPE () | RMSE () |
|---|---|---|---|
| LSTM | 2.85 | 6.42 | 4.63 |
| adaptive PSO–LSTM | 2.51 | 4.60 | 2.79 |
| EMD–LSTM | 2.74 | 5.00 | 3.06 |
| proposed | 1.40 | 2.60 | 1.62 |
| Dataset | Model | RMSE () | MAE () | MAPE () | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1 Step | 2 Steps | 3 Steps | 1 Step | 2 Steps | 3 Steps | 1 Step | 2 Steps | 3 Steps | ||
| #1 | BP | 13.9865 | 10.9504 | 17.7120 | 11.4120 | 8.1201 | 14.2360 | 0.1063 | 0.0768 | 0.1345 |
| ELM | 21.9596 | 30.6676 | 32.0620 | 17.7876 | 24.4303 | 25.5310 | 0.1657 | 0.2311 | 0.2414 | |
| LSTM | 6.5631 | 6.5619 | 6.8207 | 5.2209 | 5.2104 | 5.5277 | 0.0486 | 0.0492 | 0.0522 | |
| Bi-LSTM | 6.8805 | 18.9087 | 7.8066 | 5.4891 | 15.2301 | 6.0338 | 0.0511 | 0.1441 | 0.0570 | |
| SAE-LSTM | 16.2097 | 15.4307 | 17.7260 | 12.9579 | 12.5685 | 14.3710 | 0.1208 | 0.1189 | 0.1360 | |
| Proposed | 1.6200 | 2.2500 | 2.8930 | 1.4000 | 3.8520 | 3.9050 | 0.0262 | 0.0254 | 0.0295 | |
| #2 | BP | 24.1841 | 24.6001 | 28.3410 | 18.0727 | 19.9550 | 23.5170 | 0.1635 | 0.1831 | 0.4260 |
| ELM | 21.0534 | 42.2065 | 77.0902 | 27.0664 | 33.9358 | 46.4172 | 0.17 | 0.3110 | 0.0753 | |
| LSTM | 24.0533 | 24.1604 | 15.7080 | 14.8452 | 17.3944 | 18.2150 | 0.1346 | 0.1573 | 0.2160 | |
| Bi-LSTM | 22.5563 | 25.7633 | 29.266 | 15.9178 | 17.0951 | 22.981 | 0.144 | 0.1597 | 0.2109 | |
| SAE-LSTM | 55.6759 | 26.9501 | 44.3218 | 18.7665 | 21.5600 | 35.3644 | 0.1638 | 0.1979 | 0.3240 | |
| Proposed | 15.5211 | 18.426 | 19.7256 | 13.2542 | 14.9812 | 17.3158 | 0.02845 | 0.03249 | 0.03674 | |
| #3 | BP | 16.2574 | 16.5112 | 17.2154 | 7.8379 | 8.4329 | 9.1245 | 1.9280 | 2.6220 | 2.6270 |
| ELM | 15.3113 | 16.2548 | 18.7512 | 8.1729 | 8.2146 | 8.7512 | 1.9220 | 3.5140 | 3.2140 | |
| LSTM | 8.3712 | 9.2140 | 9.7451 | 6.1535 | 6.8421 | 7.1500 | 0.1006 | 0.1920 | 0.5320 | |
| Bi-LSTM | 11.3180 | 12.0541 | 12.9542 | 6.1678 | 6.9874 | 7.5413 | 0.1230 | 0.3610 | 0.6210 | |
| SAE-LSTM | 18.7051 | 19.0124 | 21.0244 | 6.6167 | 7.1593 | 8.1736 | 0.1830 | 0.6270 | 0.8240 | |
| Proposed | 6.2451 | 7.6214 | 9.0215 | 5.2154 | 5.9241 | 6.8314 | 0.0980 | 0.1670 | 0.3450 | |
| #4 | BP | 55.1250 | 55.8125 | 56.0124 | 21.2154 | 22.4375 | 23.4571 | 2.9853 | 3.0427 | 3.6125 |
| ELM | 50.5120 | 51.0321 | 51.8742 | 23.6451 | 23.9461 | 24.6518 | 2.4127 | 2.4672 | 2.6523 | |
| LSTM | 37.0120 | 37.6200 | 38.3124 | 15.2243 | 16.0214 | 16.9572 | 1.1245 | 1.2451 | 1.3526 | |
| Bi-LSTM | 40.1520 | 42.0158 | 42.6547 | 16.2751 | 16.9542 | 17.9512 | 1.4267 | 1.5134 | 1.5142 | |
| SAE-LSTM | 47.0420 | 48.3219 | 47.0124 | 16.9585 | 17.9561 | 18.6412 | 1.3421 | 1.4000 | 1.4873 | |
| Proposed | 25.0450 | 26.0127 | 27.6541 | 14.3214 | 14.9546 | 15.3125 | 0.8713 | 0.8971 | 1.0821 | |
| #5 | BP | 51.017 | 52.4275 | 52.9781 | 22.8124 | 23.1245 | 23.9971 | 2.6452 | 2.9451 | 3.8451 |
| ELM | 50.423 | 51.4379 | 53.1245 | 21.4648 | 22.9875 | 23.7815 | 2.1252 | 2.3215 | 2.4025 | |
| LSTM | 38.042 | 38.4512 | 39.4124 | 17.5145 | 17.4516 | 18.9155 | 1.4652 | 1.4824 | 1.6715 | |
| Bi-LSTM | 42.024 | 42.3721 | 43.7512 | 17.6891 | 17.9815 | 18.6785 | 1.3425 | 1.6541 | 1.7512 | |
| SAE-LSTM | 43.127 | 44.1289 | 45.0124 | 18.7512 | 18.7912 | 19.1544 | 0.9842 | 1.0245 | 1.6522 | |
| Proposed | 32.045 | 32.7818 | 33.1587 | 15.4215 | 15.9754 | 16.3242 | 0.9421 | 1.0134 | 1.6452 | |
| Method | MAE () | MAPE () | RMSE () |
|---|---|---|---|
| LSTM | 2.36 | 1.54 | 3.76 |
| adaptive PSO–LSTM | 0.59 | 0.81 | 0.76 |
| EMD–LSTM | 1.44 | 0.20 | 1.82 |
| proposed | 0.366 | 0.49 | 0.46 |
| Dataset | Model | RMSE () | MAE () | MAPE () | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1 Step | 2 Steps | 3 Steps | 1 Step | 2 Steps | 3 Steps | 1 Step | 2 Steps | 3 Steps | ||
| #1 | BP | 2.4880 | 2.3117 | 3.1614 | 1.9340 | 1.8354 | 2.4225 | 1.4779 | 1.4434 | 1.8784 |
| ELM | 2.3914 | 1.0785 | 1.2083 | 1.4225 | 0.7563 | 0.8680 | 1.0949 | 0.6007 | 0.6957 | |
| LSTM | 1.2950 | 1.7018 | 1.7027 | 0.9889 | 1.3026 | 1.3012 | 0.7623 | 1.0137 | 1.0121 | |
| Bi-LSTM | 1.1073 | 1.5101 | 1.4217 | 0.8423 | 1.1547 | 1.0781 | 0.6527 | 0.9016 | 0.8431 | |
| SAE-LSTM | 2.0635 | 2.0784 | 2.3906 | 1.5800 | 1.6044 | 1.8553 | 1.2290 | 1.2487 | 1.4431 | |
| Proposed | 1.0205 | 1.5426 | 2.4352 | 0.7502 | 0.9642 | 0.9852 | 0.7052 | 0.8543 | 0.9548 | |
| #2 | BP | 0.4926 | 0.5004 | 0.5021 | 0.3916 | 0.396 | 0.3970 | 0.3299 | 0.3394 | 0.3409 |
| ELM | 0.4986 | 0.5285 | 0.5295 | 0.3967 | 0.4153 | 0.4210 | 0.3342 | 0.3551 | 0.3604 | |
| LSTM | 0.4079 | 0.4224 | 0.4321 | 0.3474 | 0.3272 | 0.3346 | 0.2797 | 0.2861 | 0.2932 | |
| Bi-LSTM | 0.4478 | 0.4501 | 0.4521 | 0.3595 | 0.3644 | 0.3638 | 0.3043 | 0.3128 | 0.3118 | |
| SAE-LSTM | 0.8550 | 0.7729 | 0.869 | 0.7217 | 0.6985 | 0.6143 | 0.5207 | 0.6002 | 0.6103 | |
| Proposed | 0.3052 | 0.3564 | 0.4215 | 0.3025 | 0.3345 | 0.3501 | 0.2015 | 0.2341 | 0.2654 | |
| #3 | BP | 3.1247 | 3.4521 | 4.0421 | 2.3210 | 2.3954 | 2.9525 | 1.6421 | 1.7512 | 1.7834 |
| ELM | 3.4541 | 3.6422 | 3.9875 | 2.0423 | 2.3212 | 2.6215 | 1.0455 | 1.4245 | 1.4625 | |
| LSTM | 2.3124 | 2.4215 | 2.5124 | 1.0425 | 1.3251 | 1.4236 | 0.6421 | 0.6678 | 0.8451 | |
| Bi-LSTM | 2.6452 | 2.7812 | 2.9815 | 1.3451 | 1.3642 | 1.4203 | 0.8451 | 0.8945 | 0.9451 | |
| SAE-LSTM | 2.4215 | 2.6451 | 2.9875 | 1.6254 | 1.6355 | 1.8533 | 0.8342 | 0.8643 | 0.8965 | |
| Proposed | 1.4521 | 1.6751 | 1.7235 | 0.9345 | 1.0421 | 1.3425 | 0.6421 | 0.6512 | 0.7345 | |
| #4 | BP | 7.1515 | 7.6421 | 8.4512 | 4.0451 | 4.3125 | 4.5421 | 2.6425 | 2.7562 | 2.7865 |
| ELM | 7.1245 | 7.5245 | 7.6154 | 3.4512 | 3.6427 | 3.9854 | 2.4514 | 2.6452 | 2.7635 | |
| LSTM | 4.4512 | 4.6457 | 5.0421 | 2.4512 | 2.5634 | 2.8754 | 1.4516 | 1.4634 | 1.6552 | |
| Bi-LSTM | 4.6124 | 4.7815 | 4.9871 | 2.9451 | 3.0124 | 3.0125 | 1.6421 | 1.7542 | 1.7954 | |
| SAE-LSTM | 5.1544 | 5.3425 | 5.2154 | 2.8754 | 2.9845 | 3.0124 | 1.6784 | 1.9780 | 2.0451 | |
| Proposed | 3.2451 | 3.6452 | 3.9875 | 1.9458 | 2.0143 | 2.1345 | 1.3451 | 1.3649 | 1.4535 | |
| #5 | BP | 7.9146 | 8.1246 | 8.9578 | 4.0414 | 4.3215 | 4.9485 | 2.5861 | 2.6784 | 2.7625 |
| ELM | 7.8124 | 8.0451 | 8.6524 | 4.6152 | 4.9781 | 5.0145 | 2.5463 | 2.6458 | 2.8451 | |
| LSTM | 5.6412 | 5.7215 | 5.9841 | 3.0154 | 3.4614 | 3.8452 | 1.6535 | 1.6854 | 1.7058 | |
| Bi-LSTM | 5.9842 | 6.2451 | 6.3758 | 3.1245 | 3.2481 | 3.4585 | 1.6784 | 1.6524 | 1.7815 | |
| SAE-LSTM | 6.5167 | 7.0124 | 7.6255 | 3.4625 | 3.6421 | 4.0458 | 1.6736 | 1.7544 | 1.8065 | |
| Proposed | 4.5671 | 4.6875 | 4.9587 | 2.8451 | 2.9845 | 3.0142 | 1.1643 | 1.4268 | 1.3815 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Geng, X.; Li, Y.; Sun, Q. A Novel Short-Term Ship Motion Prediction Algorithm Based on EMD and Adaptive PSO–LSTM with the Sliding Window Approach. J. Mar. Sci. Eng. 2023, 11, 466. https://doi.org/10.3390/jmse11030466
Geng X, Li Y, Sun Q. A Novel Short-Term Ship Motion Prediction Algorithm Based on EMD and Adaptive PSO–LSTM with the Sliding Window Approach. Journal of Marine Science and Engineering. 2023; 11(3):466. https://doi.org/10.3390/jmse11030466
Chicago/Turabian StyleGeng, Xiaoyu, Yibing Li, and Qian Sun. 2023. "A Novel Short-Term Ship Motion Prediction Algorithm Based on EMD and Adaptive PSO–LSTM with the Sliding Window Approach" Journal of Marine Science and Engineering 11, no. 3: 466. https://doi.org/10.3390/jmse11030466