


State Compensation for Maritime Autonomous Surface Ships’ Remote Control

Abstract
:1. Introduction
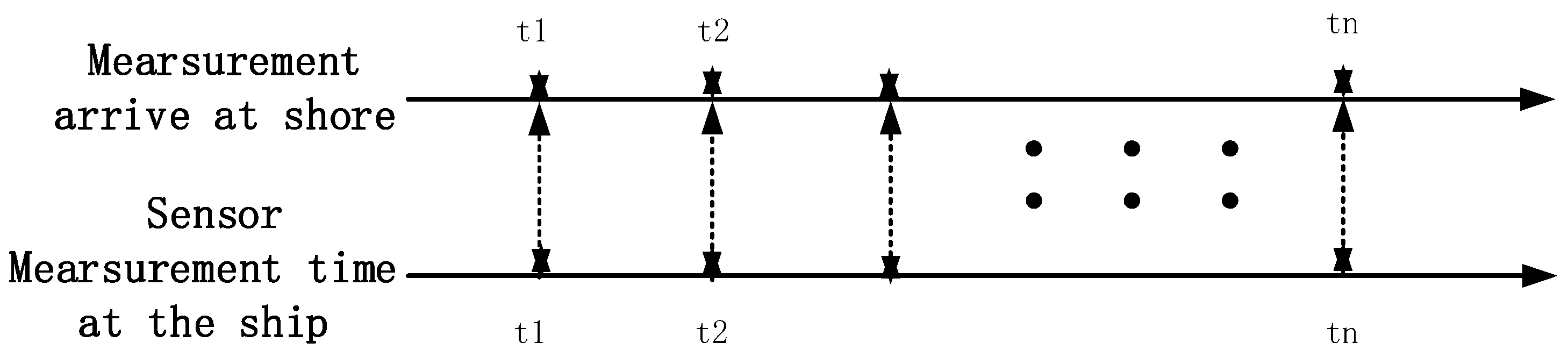
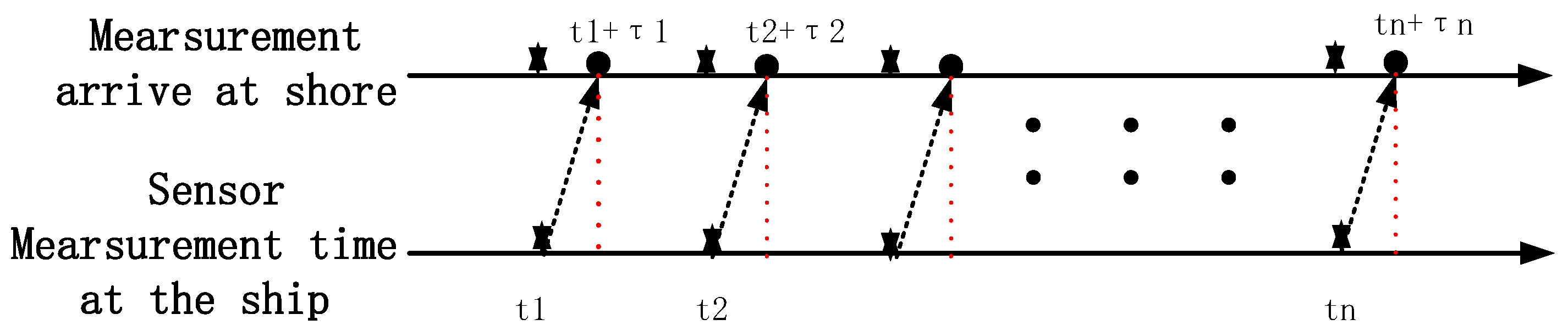
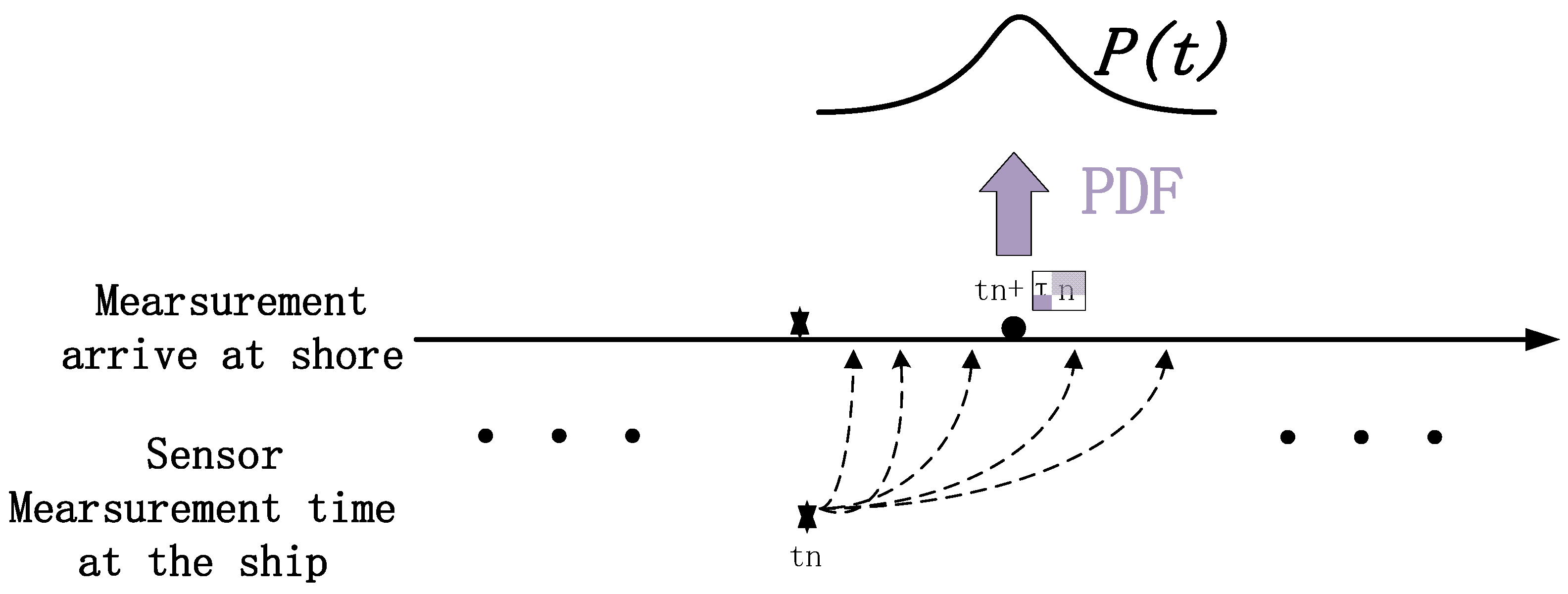
2. Problem Statement
3. Improved Cubature Kalman Filter Considering Uncertain Delays
3.1. Original Cubature Kalman Filter
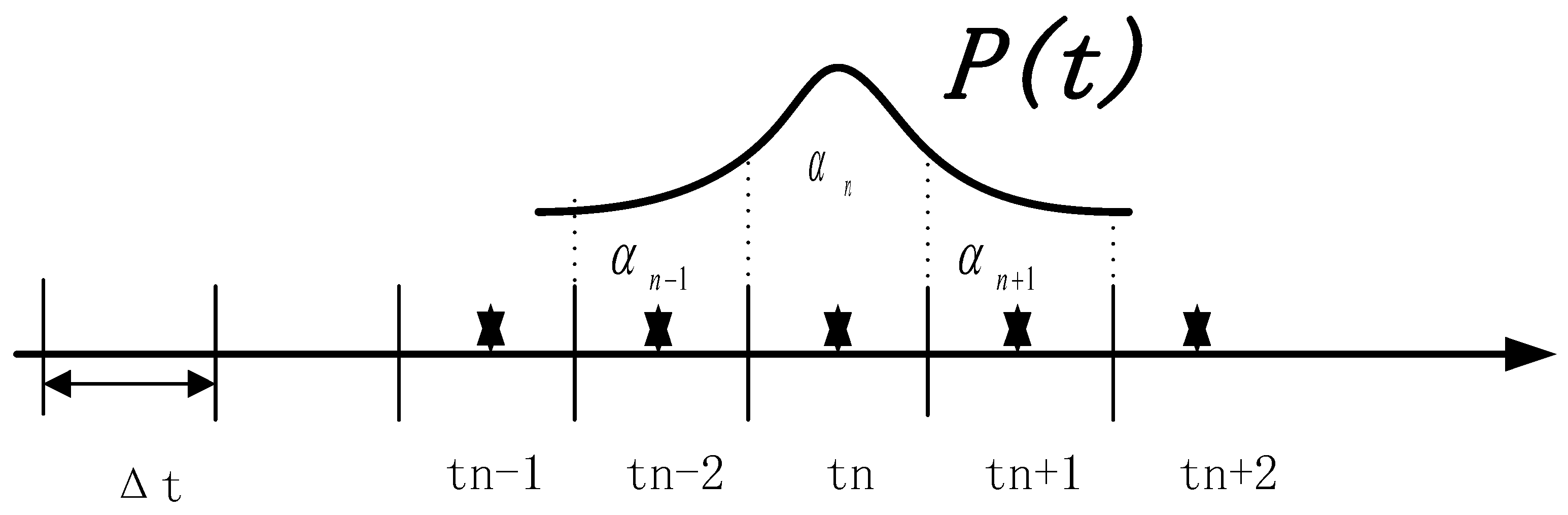
3.2. Improved CKF Considering Uncertain Time Delay
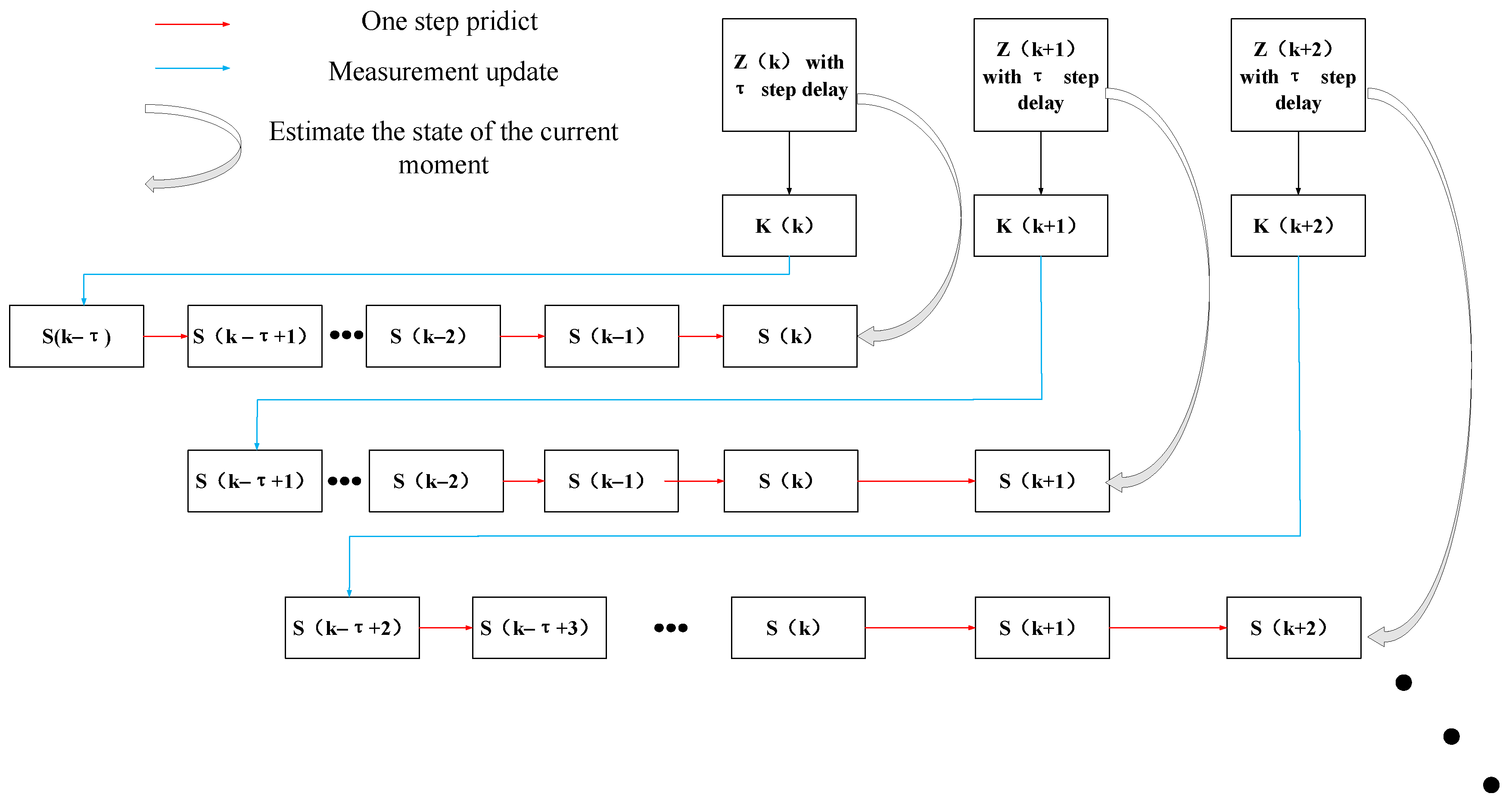
4. Delay-Compensated State Estimation for MASS
4.1. Framework of Method
4.2. Augmented State Cubature Kalman Filter (AS-CKF)
5. Simulation and Analysis
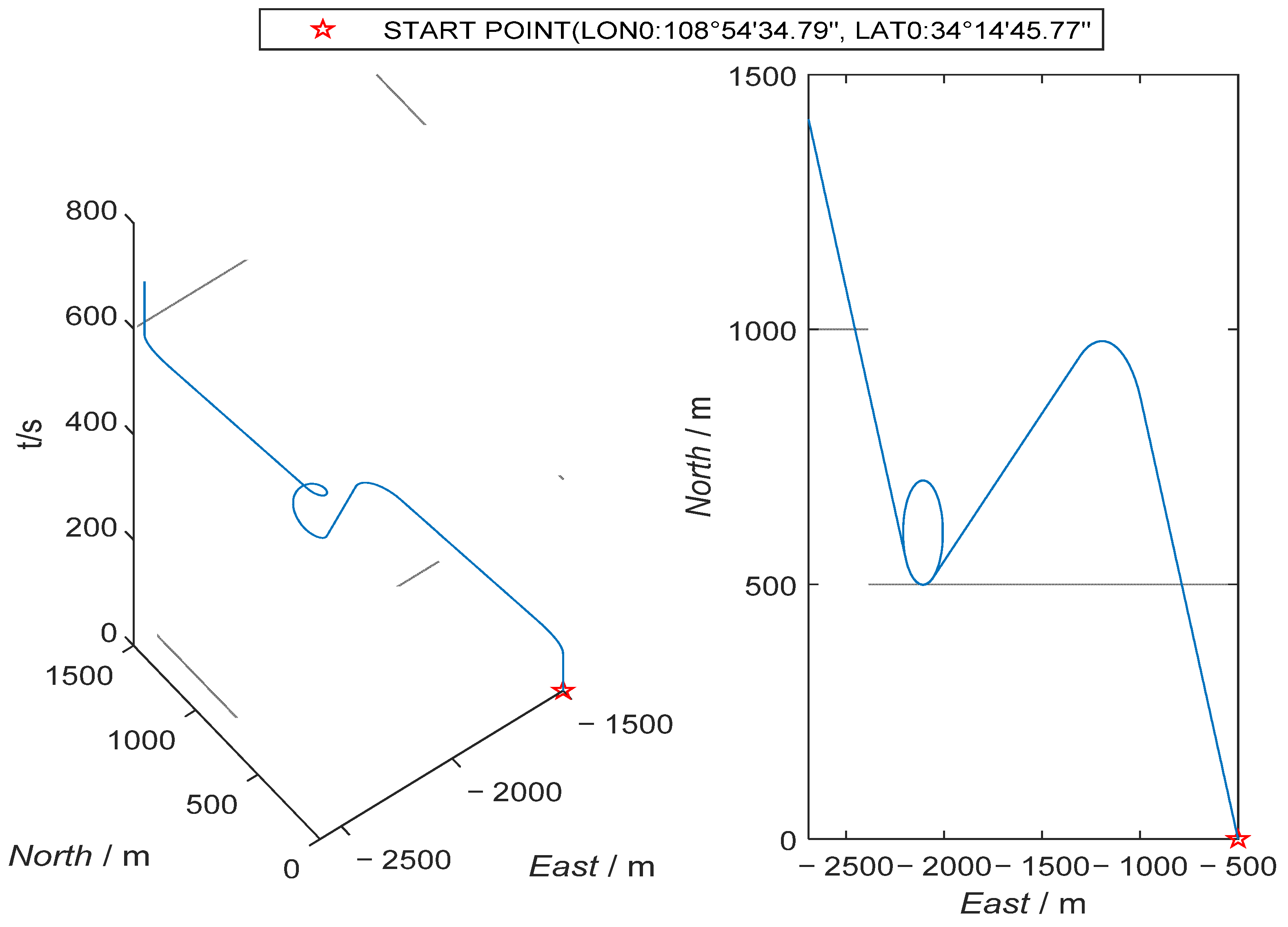
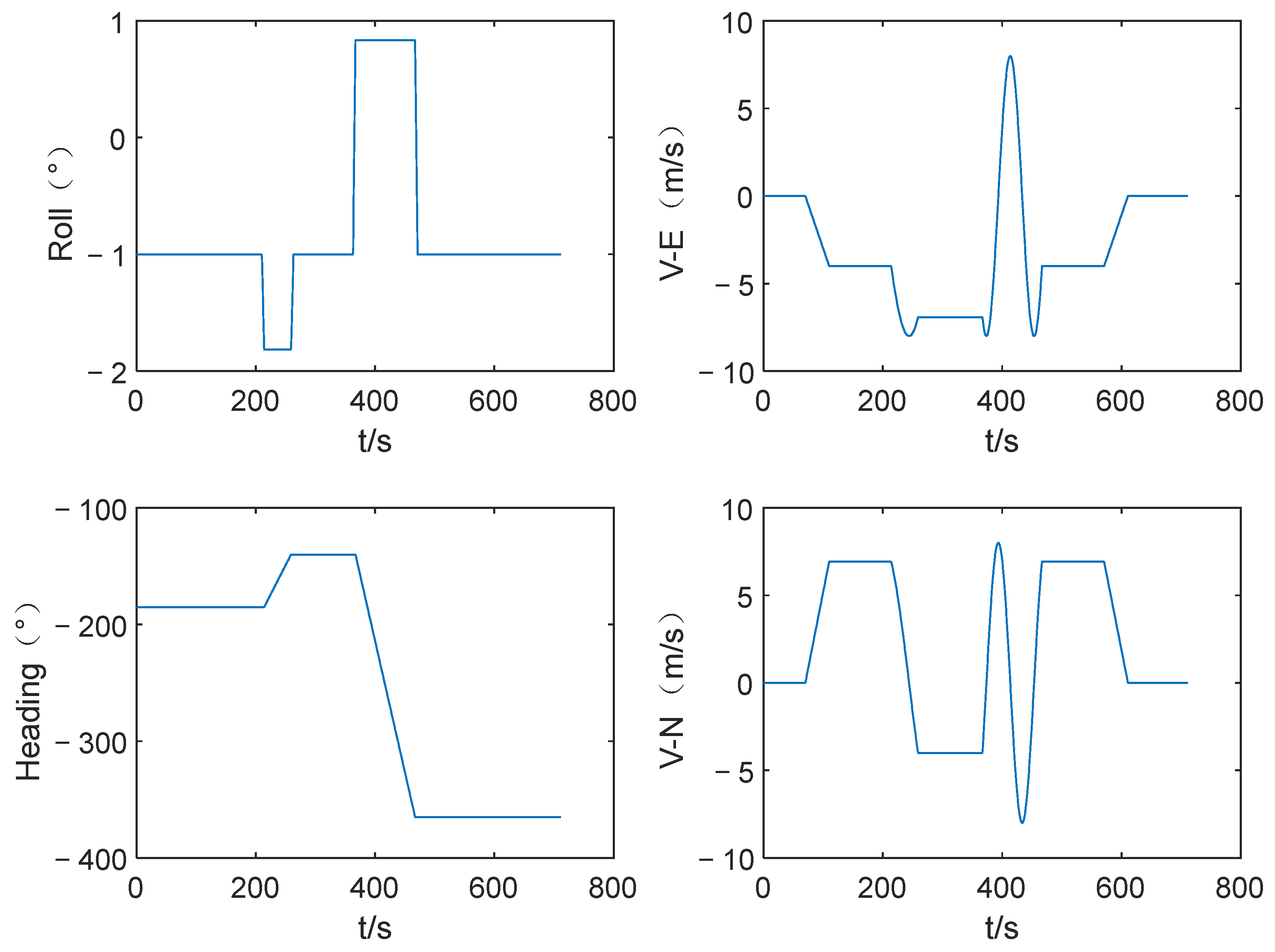
5.1. Setups
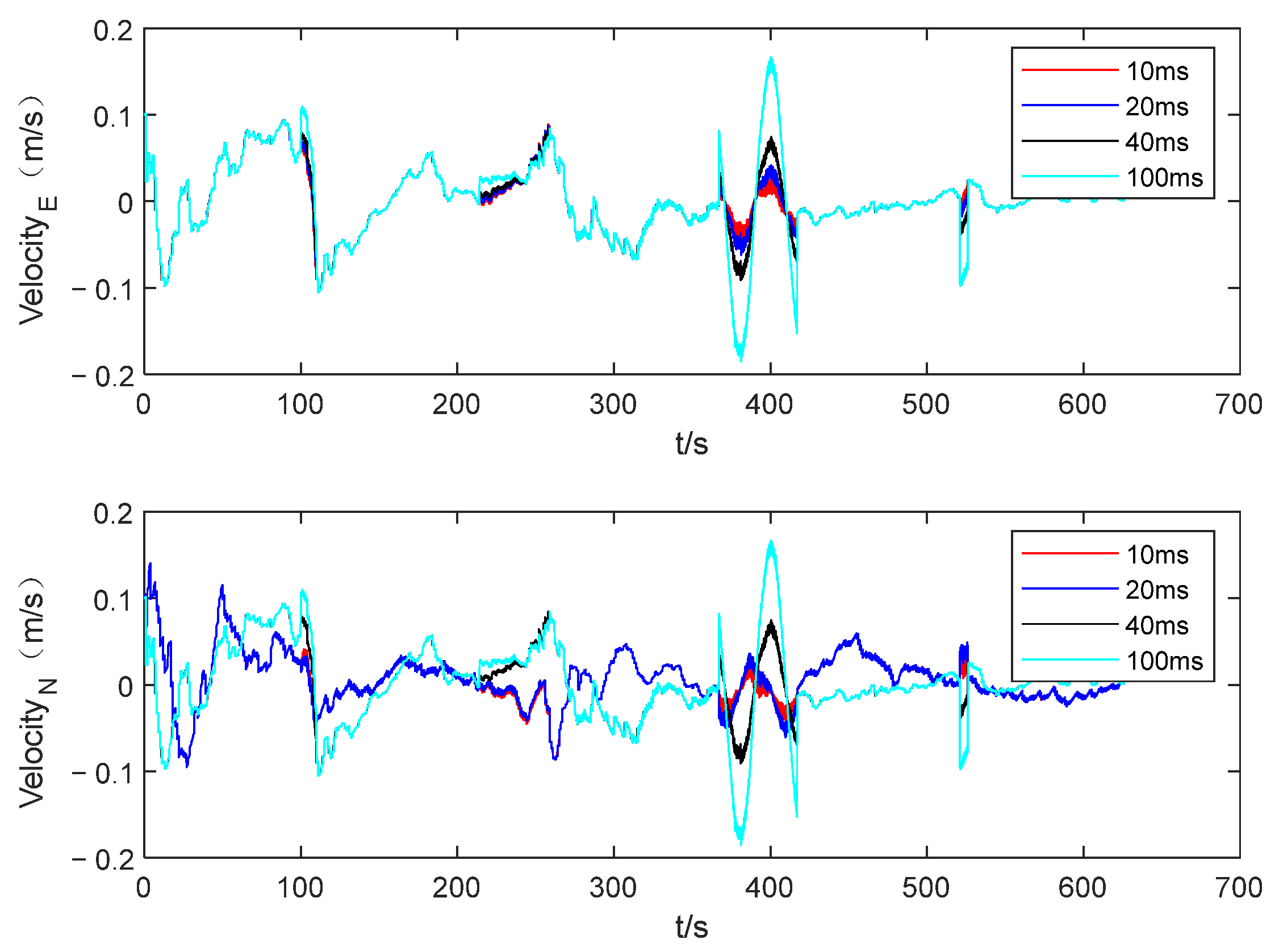
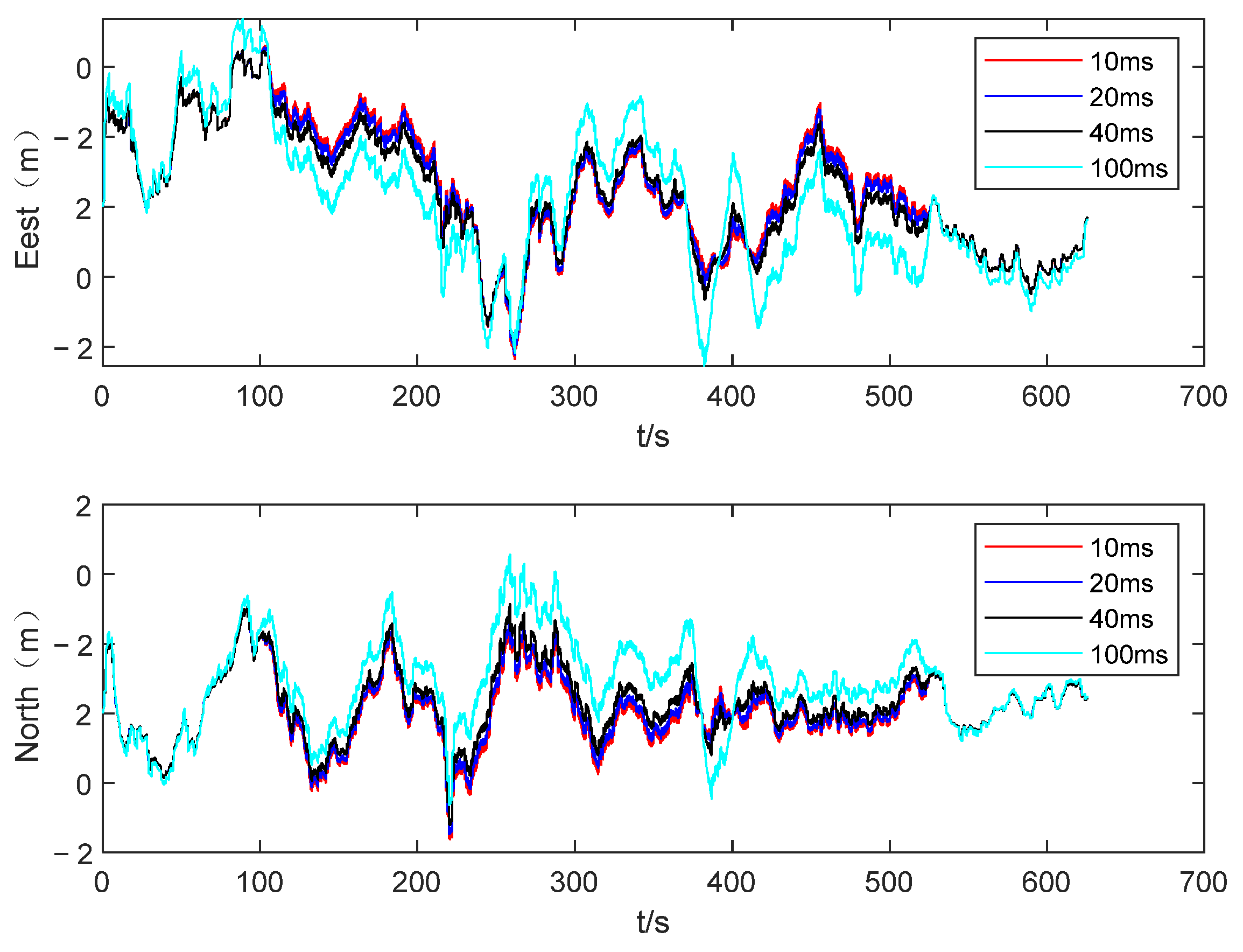
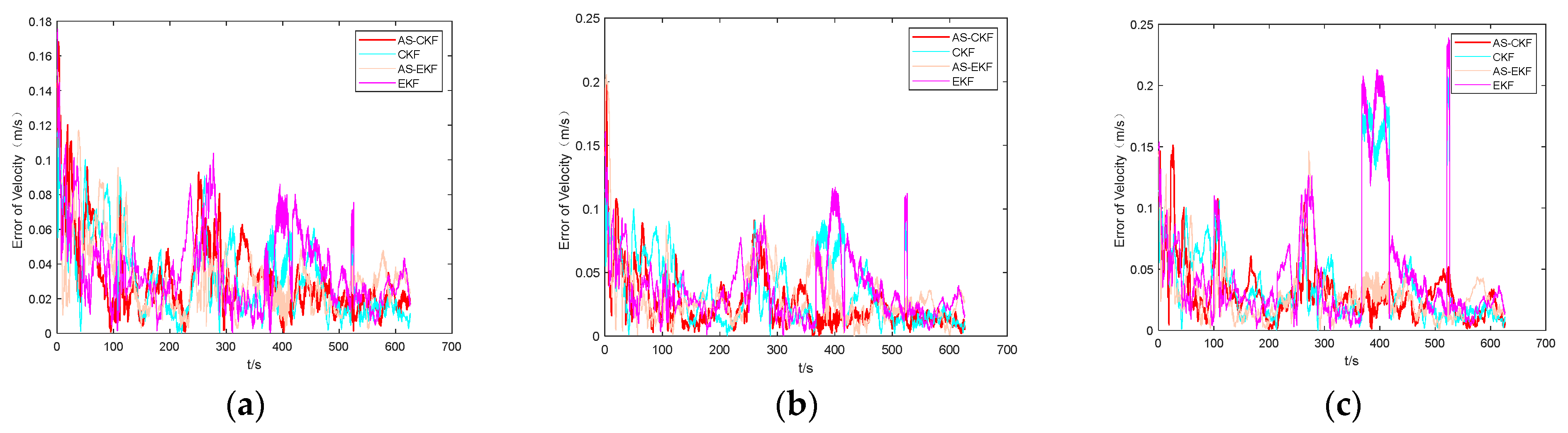
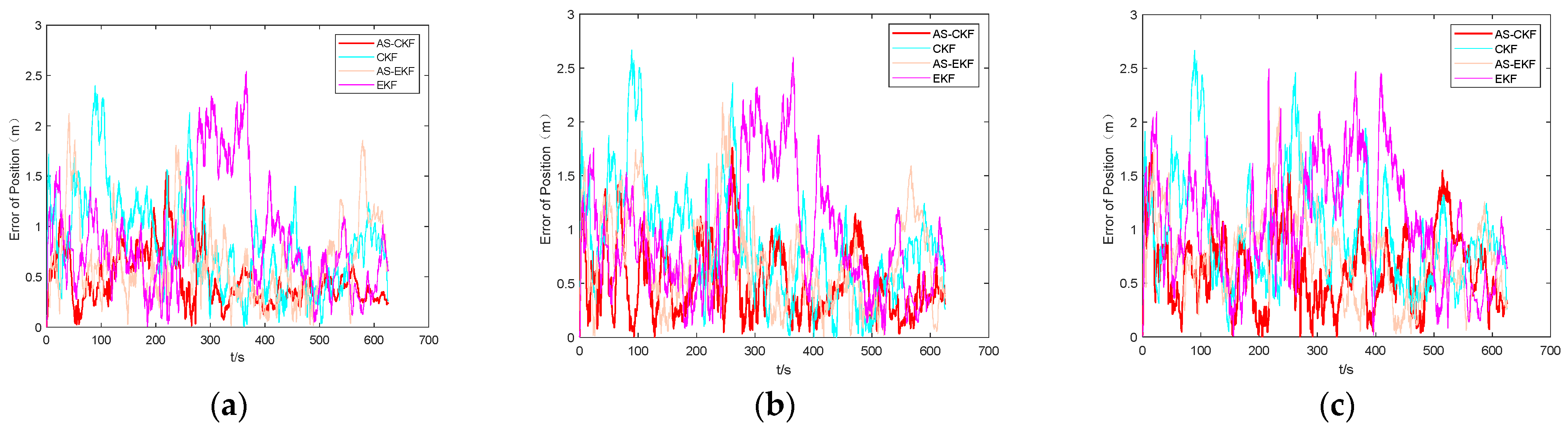
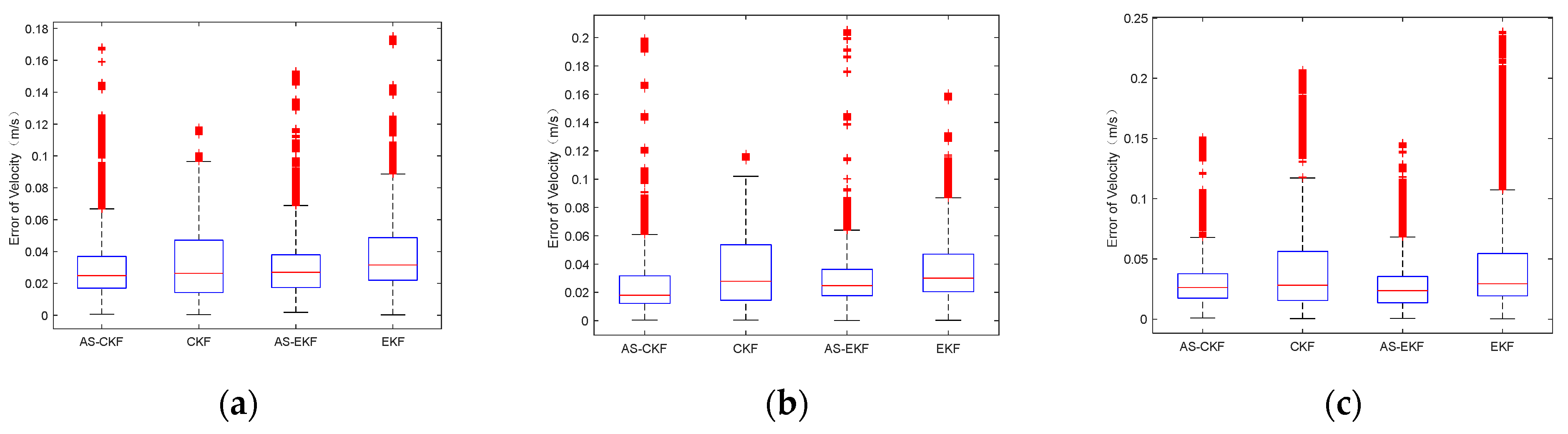
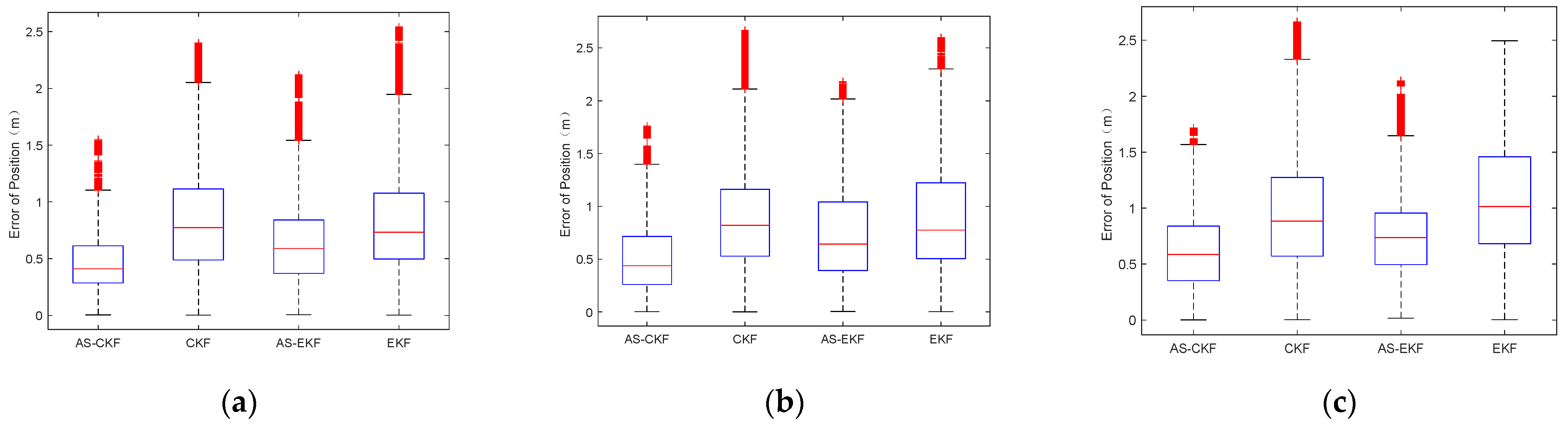
5.2. Simulation Results
5.3. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Felski, A.; Zwolak, K. The Ocean-Going Autonomous Ship-Challenges and Threats. J. Mar. Sci. Eng. 2020, 8, 41. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.M.; Chen, L.Y. Generalized velocity obstacle algorithm for preventing ship collisions at sea. Ocean Eng. 2019, 173, 142–156. [Google Scholar] [CrossRef]
- Chang, C.H.; Kontovas, C.; Yu, Q.; Yang, Z.L. Risk assessment of the operations of maritime autonomous surface ships. Reliab. Eng. Syst. Saf. 2021, 207, 107324. [Google Scholar] [CrossRef]
- Fan, C.L.; Wrobel, K.; Montewka, J.; Gil, M.; Wan, C.P.; Zhang, D. A framework to identify factors influencing navigational risk for Maritime Autonomous Surface Ships. Ocean. Eng. 2020, 202, 107188. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, X.; Li, R.; Dong, P. Path Planning of Maritime Autonomous Surface Ships in Unknown Environment with Reinforcement Learning. In Proceedings of the 4th International Conference on Cognitive Systems and Information Processing (ICCSIP), Beijing, China, 29 November–1 December 2022; pp. 127–137. [Google Scholar]
- Hoyhtya, M.; Martio, J. Integrated Satellite-Terrestrial Connectivity for Autonomous Ships: Survey and Future Research Directions. Remote Sens. 2020, 12, 2507. [Google Scholar] [CrossRef]
- Lamm, A.; Piotrowski, J.A.; Hahn, A. Shore based Control Center Architecture for Teleoperation of Highly Automated Inland Waterway Vessels in Urban Environments. In Proceedings of the 19th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Lisbon, Portugal, 14–16 July 2022; pp. 17–28. [Google Scholar]
- Xing, Y.C.; Zhang, F.T.; IEEE. Compensation and Simulation of Uncertain Time Delay in Remote Haptic Interface. In Proceedings of the 2nd International Conference on Frontiers of Sensors Technologies (ICFST), Shenzhen, China, 14–16 April 2017; pp. 440–443. [Google Scholar]
- Gustafsson, F.; Hendeby, G. Some Relations Between Extended and Unscented Kalman Filters. Ieee Trans. Signal Process. 2012, 60, 545–555. [Google Scholar] [CrossRef] [Green Version]
- Li, M.; Mourikis, A.I. High-precision, consistent EKF-based visual-inertial odometry. Int. J. Robot. Res. 2013, 32, 690–711. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef] [Green Version]
- Jia, B.; Xin, M.; Cheng, Y. High-degree cubature Kalman filter. Automatica 2013, 49, 510–518. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature Kalman Filters. IEEE Trans. Autom. Control. 2009, 54, 1254–1269. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.W. Performance evaluation of Cubature Kalman filter in a GPS/IMU tightly-coupled navigation system. Signal Process. 2016, 119, 67–79. [Google Scholar] [CrossRef]
- Shi, Y.F.; Qayyum, S.; Memon, S.A.; Khan, U.; Imtiaz, J.; Ullah, I.; Dancey, D.; Nawaz, R. A Modified Bayesian Framework for Multi-Sensor Target Tracking with Out-of-Sequence-Measurements. Sensors 2020, 20, 3821. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.G.; Qin, W.T.; Bai, Y.L.; Cui, N.G. Cooperative target localization using multiple UAVs with out-of-sequence measurements. Aircr. Eng. Aerosp. Technol. 2017, 89, 112–119. [Google Scholar] [CrossRef]
- Hua, J.N.; Cui, Y.J.; Yang, Y.H.; Li, H.Y.; IEEE. Analysis and Prediction of Jitter of Internet One-Way Time-Delay for Teleoperation Systems. In Proceedings of the 11th IEEE International Conference on Industrial Informatics (INDIN), Bochum, Germany, 29–31 July 2013; pp. 612–617. [Google Scholar]
- Bar-Shalom, Y. Update with out-of-sequence measurements in tracking: Exact solution. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 769–778. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Chen, H.M.; Mallick, M. One-step solution for the multistep out-of-sequence-measurement problem in tracking. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 27–37. [Google Scholar] [CrossRef]
- Lee, K.; Johnson, E.N.; IEEE. State and Parameter Estimation Using Measurements with Unknown Time Delay. In Proceedings of the 1st Annual IEEE Conference on Control Technology and Applications, Kohala, HI, USA, 27–30 August 2017; pp. 1402–1407. [Google Scholar]
- Zhang, S.J.; Cao, Y. Cooperative Localization Approach for Multi-Robot Systems Based on State Estimation Error Compensation. Sensors 2019, 19, 3842. [Google Scholar] [CrossRef] [Green Version]
- Choi, M.; Choi, J.; Chung, W.K. State estimation with delayed measurements incorporating time-delay uncertainty. Iet Control Theory Appl. 2012, 6, 2351–2361. [Google Scholar] [CrossRef]
- Das, B.; Dobie, G. Delay compensated state estimation for Telepresence robot navigation. Robot. Auton. Syst. 2021, 146, 103890. [Google Scholar] [CrossRef]
- Adachi, R.; Yamashita, Y.; IEEE. Delay-Compensated Maximum Likelihood Estimation Method for Quadrotor UAV. In Proceedings of the IEEE Conference on Control and Applications (CCA), Sydney, Australia, 21–23 September 2015; pp. 601–606. [Google Scholar]
- Lu, J.; Darmofal, D.L. Higher-dimensional integration with Gaussian weight for applications in probabilistic design. Siam J. Sci. Comput. 2004, 26, 613–624. [Google Scholar] [CrossRef] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time (s) | Status of Smart Ships | Changes in Motion Parameters |
|---|---|---|
| (0,70] | System initialization and initial alignment | - |
| (70,110] | Accelerate (m/s2) | Forward acceleration = 0.2 m/s2 |
| (110,200] | Straight ahead | Forward acceleration = 0 m/s2 |
| (200,204] | Rolling left (°/s) | Roll rate = −1.836°/s |
| (204,249] | Turning left (°/s) | Heading rate = 2°/s Roll rate = 0°/s |
| (249,253] | Rolling right (°/s) | Heading rate = 0°/s Roll rate = 1.836°/s |
| (253,343] | Straight ahead (°/s) | Roll rate = 0°/s |
| (343,347] | Rolling right (°/s) | Roll rate = 4.12°/s |
| (347,447] | Turning right (°/s) | Heading rate = 4.5°/s Roll rate = 0°/s |
| (447,451] | Rolling left (°/s) | Heading rate = 0°/s Roll rate = −4.12°/s |
| (451,541] | Straight ahead (°/s) | Roll rate = 0°/s |
| (541,581] | Decelerate (m/s2) | Forward acceleration = −0.2 m/s2 |
| (581,661] | Still | Forward acceleration = 0 m/s2 |
| Parameter | Value | |
|---|---|---|
| Initial position error | East (m) North (m) | 1 1 |
| Initial speed error | East (m/s) North (m/s) | 0.1 0.1 |
| Initial attitude error | Roll (arcsec) | 30 |
| Pitch (arcsec) | −30 | |
| Heading (arcmin) | 30 | |
| Parameters of the gyroscope | Constant bias (°/h) Random walk () | 0.05 0.005 |
| Parameters of accelerometer | Constant bias (ug) Random walk (ug/) | 400 20 |
| GPS noise | Noise of Position (m) Noise of velocity (m/s) | (1, 1, 3) (0.1, 0.1, 0.1) |
| Delay parameter setting | Gaussian distribution (μ,σ) | Μ = (10, 20, 40, 100), σ = 1/5μ |
| Average Delay in Time (ms) | RMSE | Improvement | Improvement | ||
|---|---|---|---|---|---|
| CKF | AS-EKF | AS-CKF | Compared with CKF (%) | Compared with AS-EKF (%) | |
| 20 | 0.02122 | 0.0200 | 0.0194 | 9.38 | <5 |
| 40 | 0.02530 | 0.0199 | 0.0187 | 28.06 | 6.9 |
| 100 | 0.02690 | 0.0210 | 0.0190 | 26.92 | 10.52 |
| Average Delay in Time (ms) | RMSE | Improvement | Improvement | ||
|---|---|---|---|---|---|
| CKF | AS-EKF | AS-CKF | Compared with CKF (%) | Compared with AS-EKF (%) | |
| 20 | 0.5033 | 0.4389 | 0.4379 | 13.01 | <5 |
| 40 | 0.5798 | 0.4577 | 0.4424 | 23.78 | <5 |
| 100 | 0.6395 | 0.4845 | 0.4254 | 33.41 | 13.89 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, S.; Xiong, X.; Wen, Y.; Jian, J.; Huang, Y. State Compensation for Maritime Autonomous Surface Ships’ Remote Control. J. Mar. Sci. Eng. 2023, 11, 450. https://doi.org/10.3390/jmse11020450
Chen S, Xiong X, Wen Y, Jian J, Huang Y. State Compensation for Maritime Autonomous Surface Ships’ Remote Control. Journal of Marine Science and Engineering. 2023; 11(2):450. https://doi.org/10.3390/jmse11020450
Chicago/Turabian StyleChen, Shijun, Xin Xiong, Yuanqiao Wen, Jiaxin Jian, and Yamin Huang. 2023. "State Compensation for Maritime Autonomous Surface Ships’ Remote Control" Journal of Marine Science and Engineering 11, no. 2: 450. https://doi.org/10.3390/jmse11020450