
Study on Wave Loads during Steady-State Gap Resonance with Free Heave Motion of Floating Structure
 ,
,  , ,
, ,
Abstract
:1. Introduction
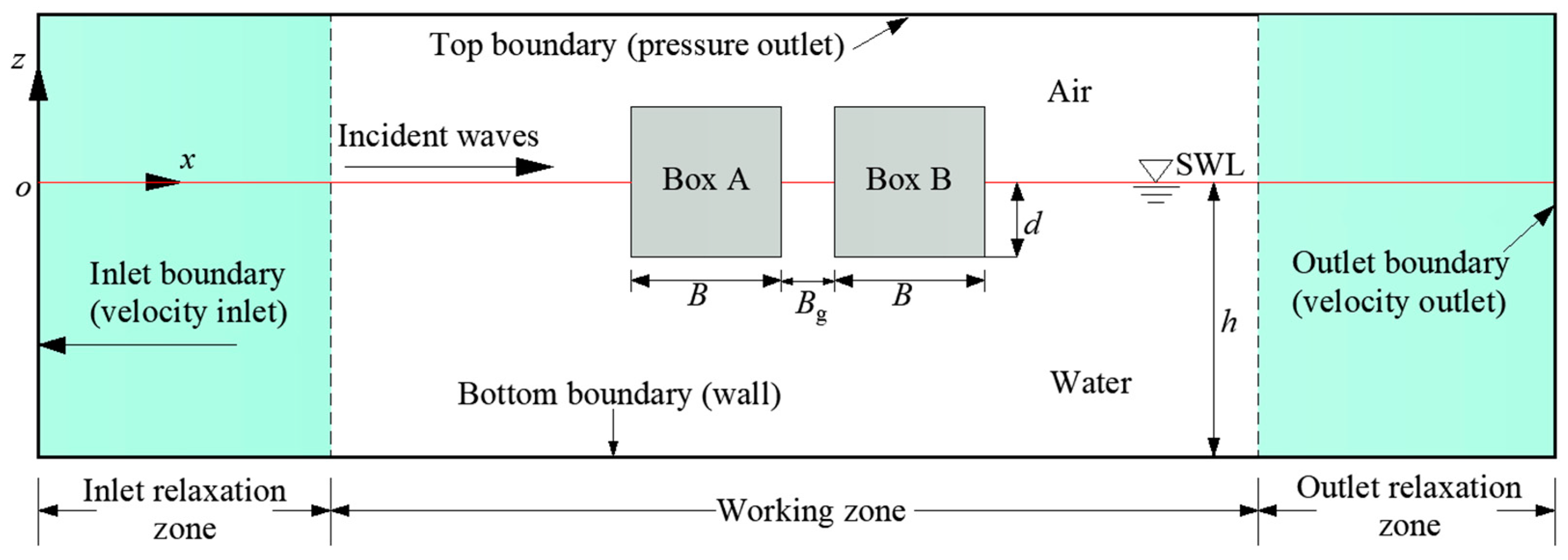
2. Description of Numerical Model
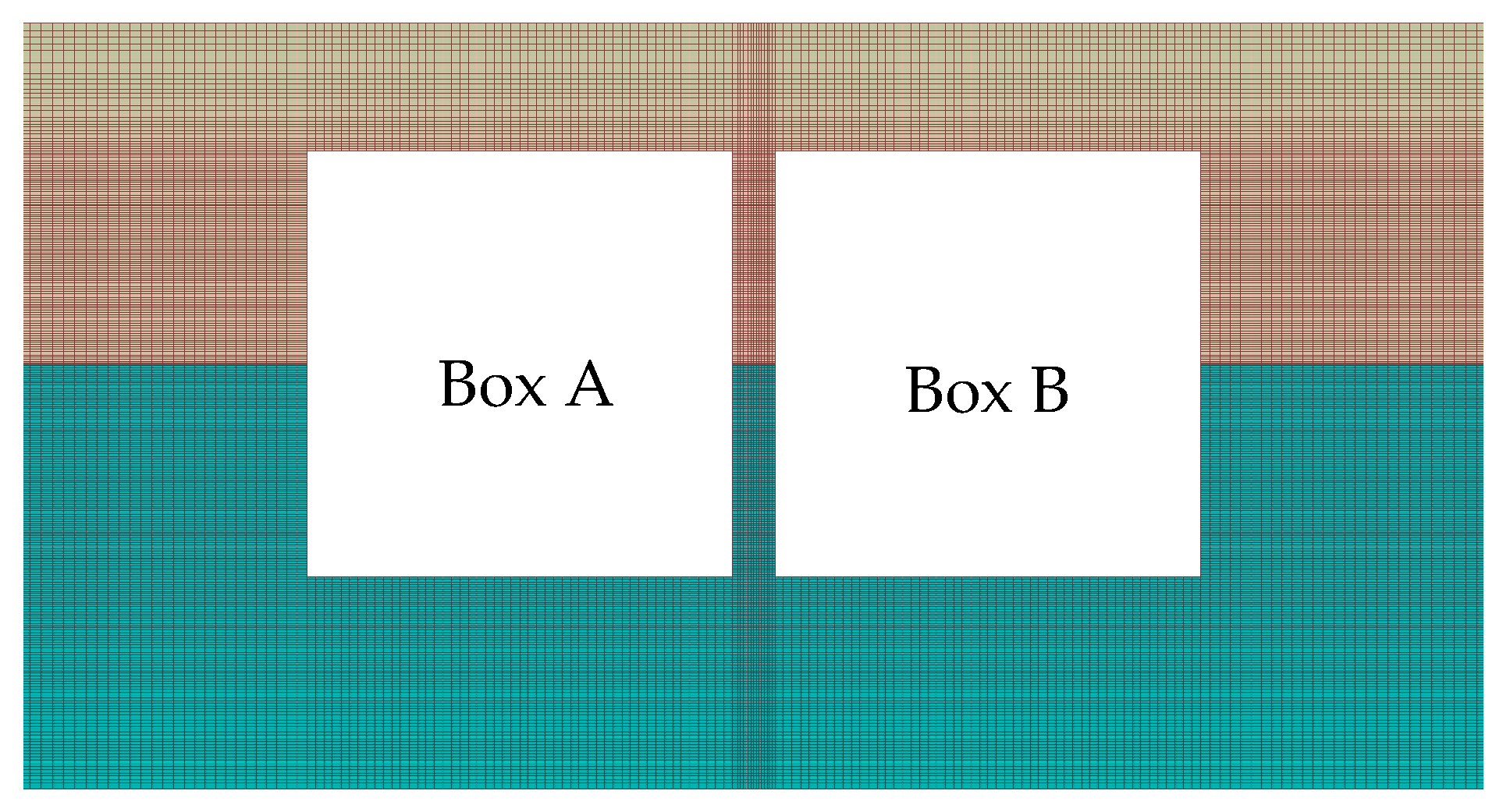
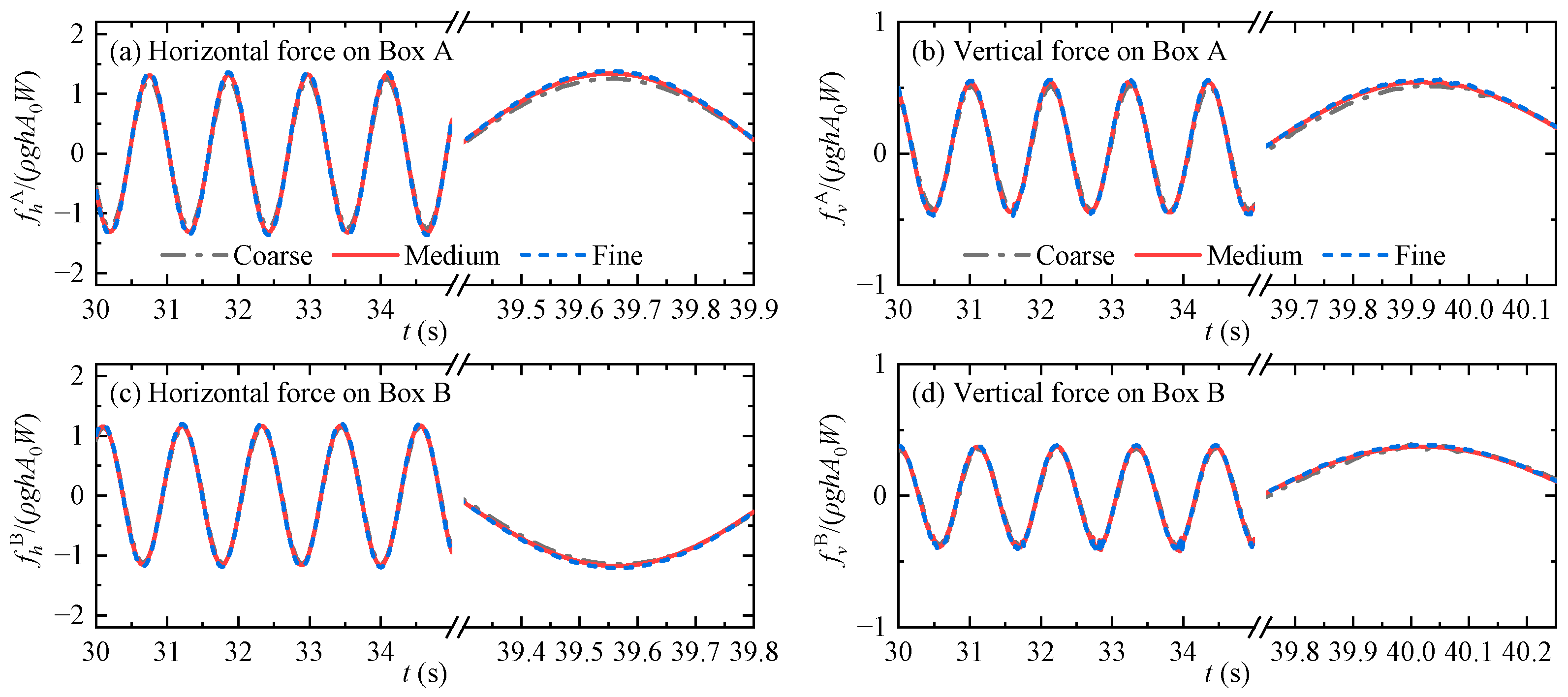
3. Numerical Wave Tank
4. Results and Discussion
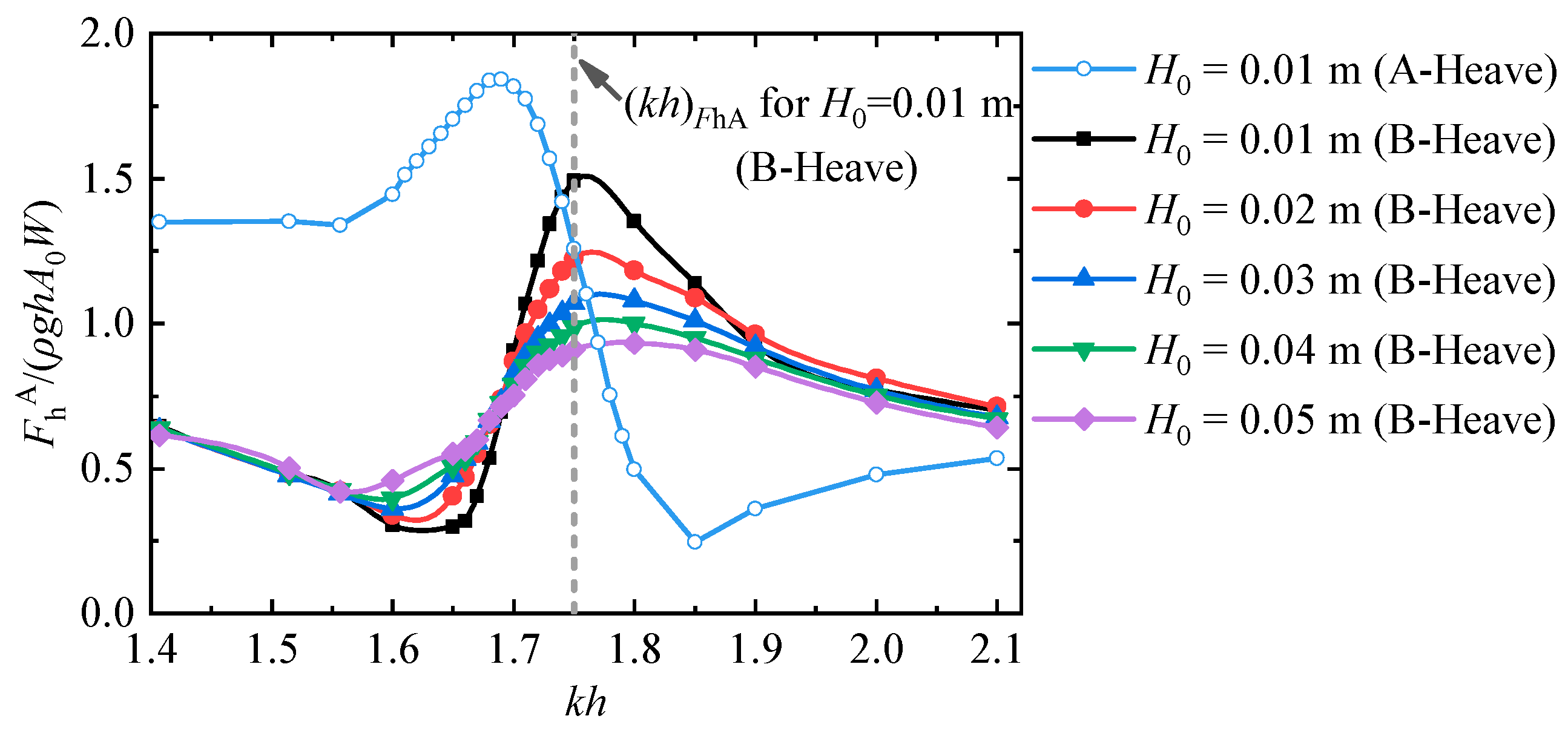
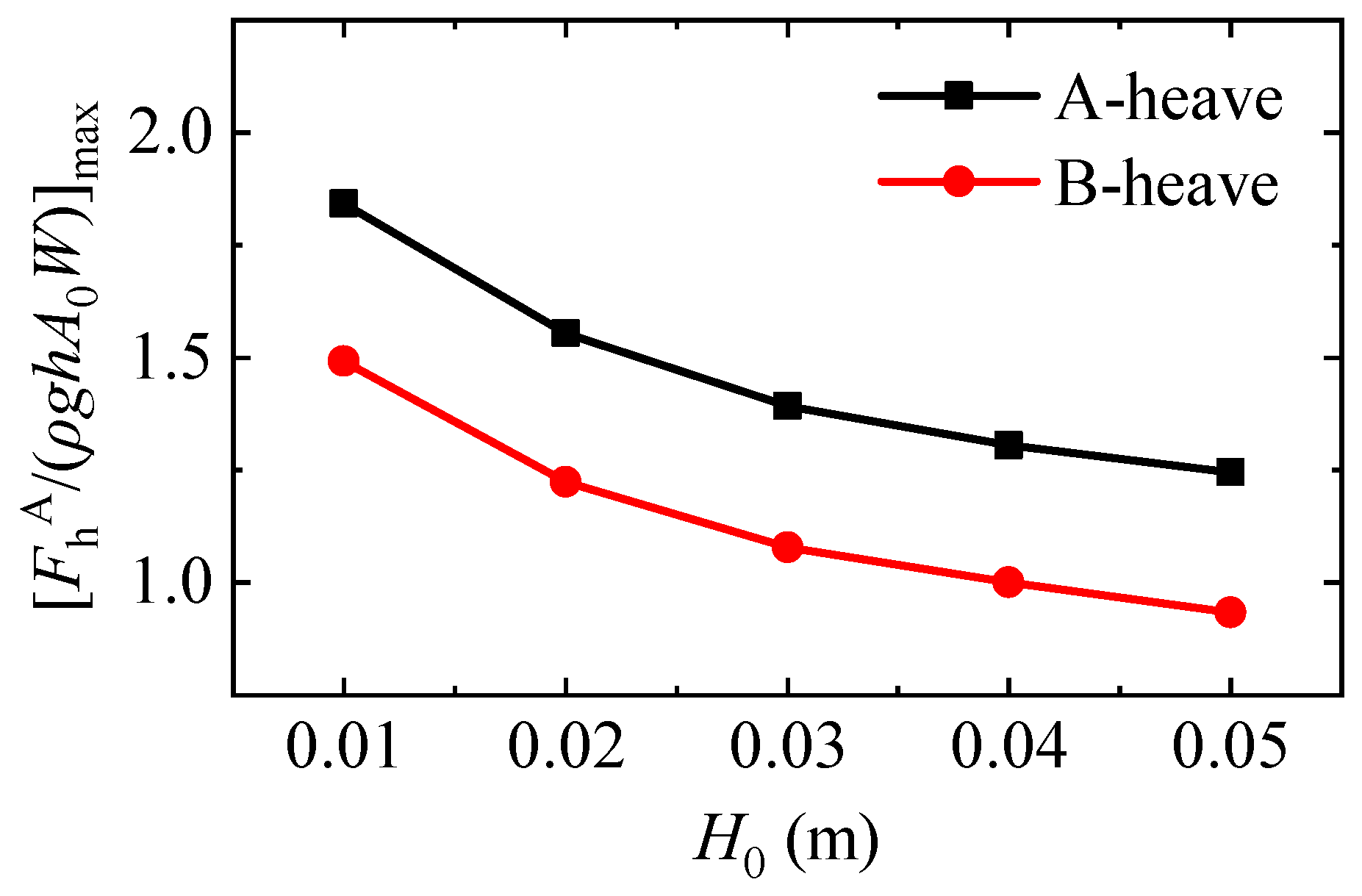
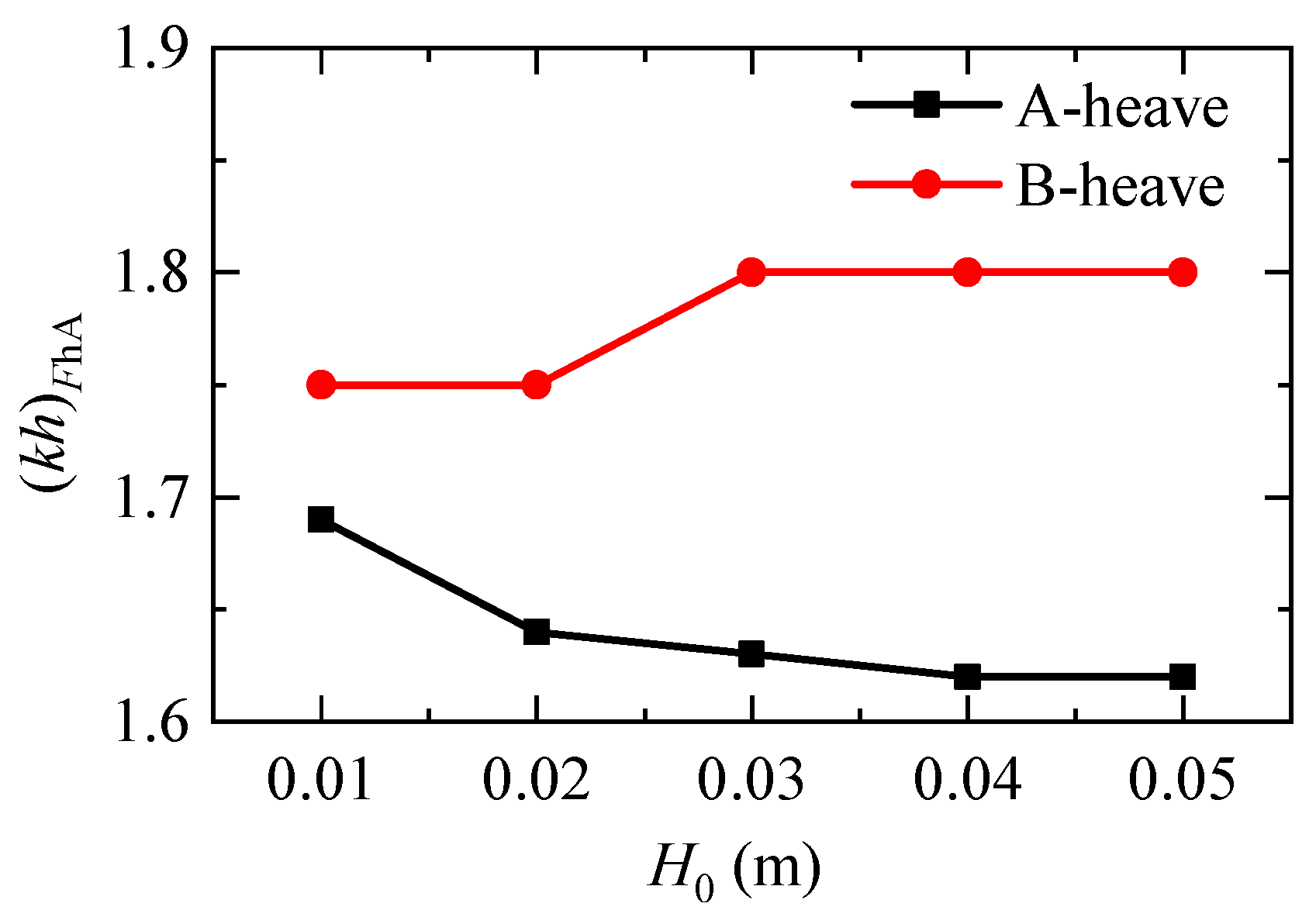
4.1. Horizontal Wave Forces on Box A
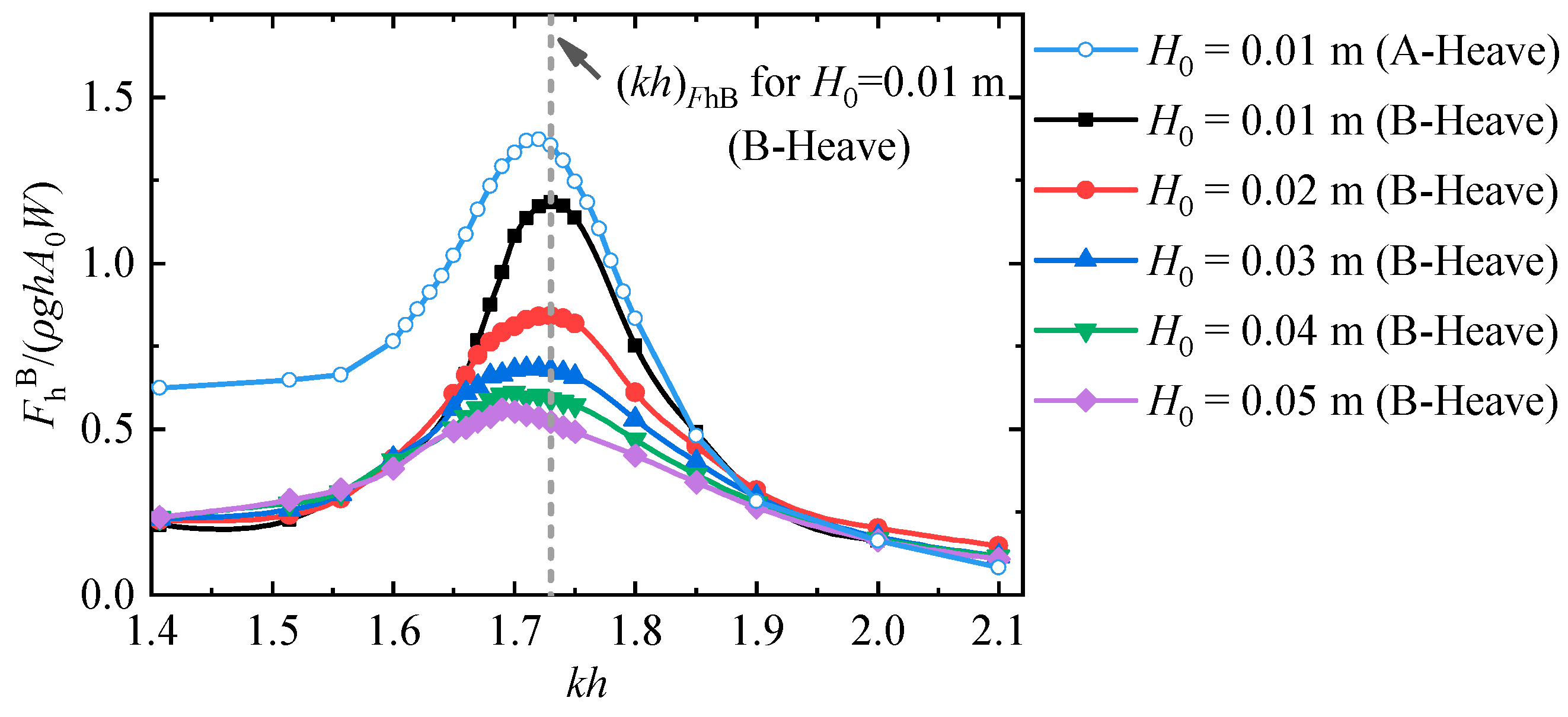
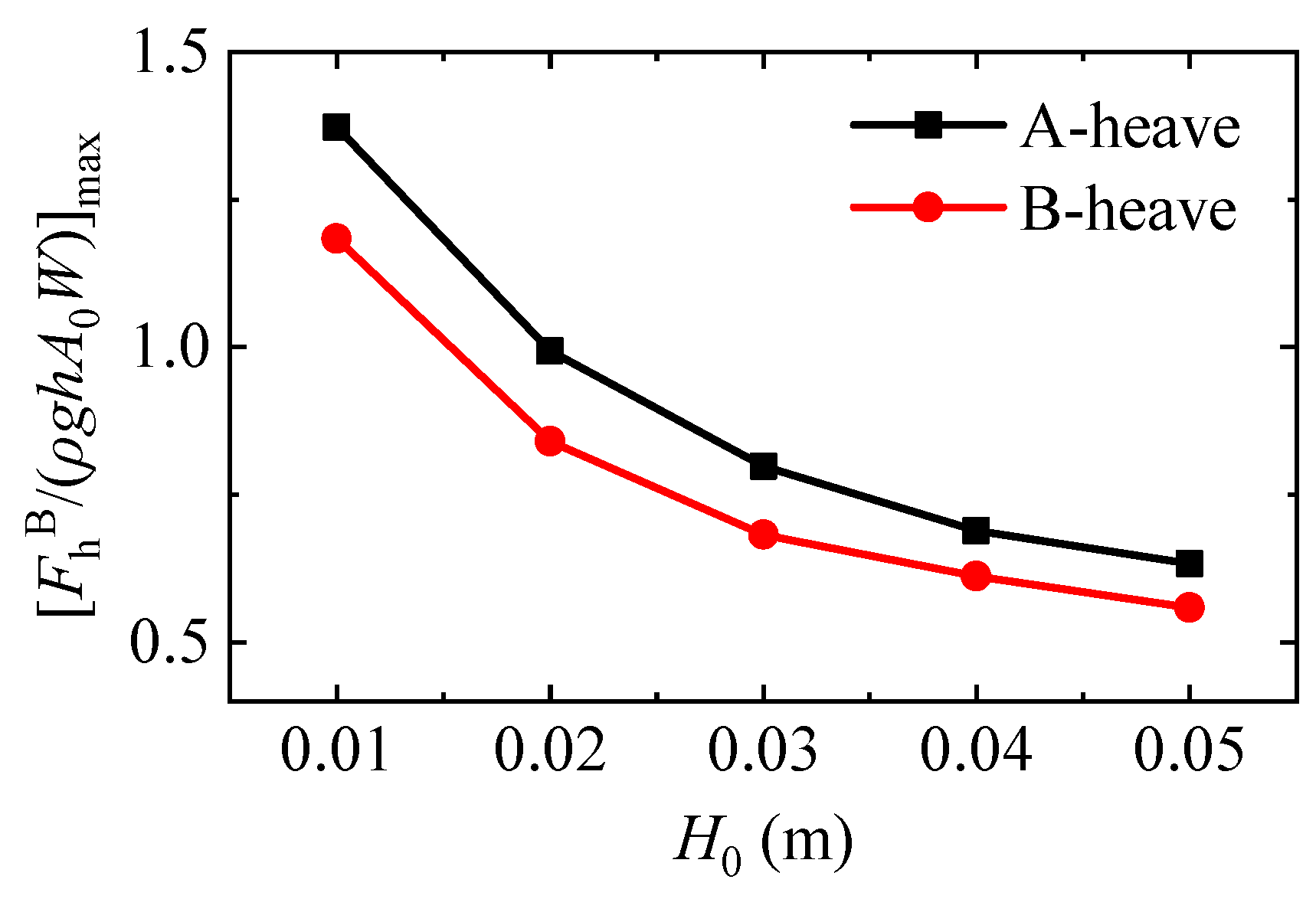
4.2. Horizontal Wave Forces on Box B
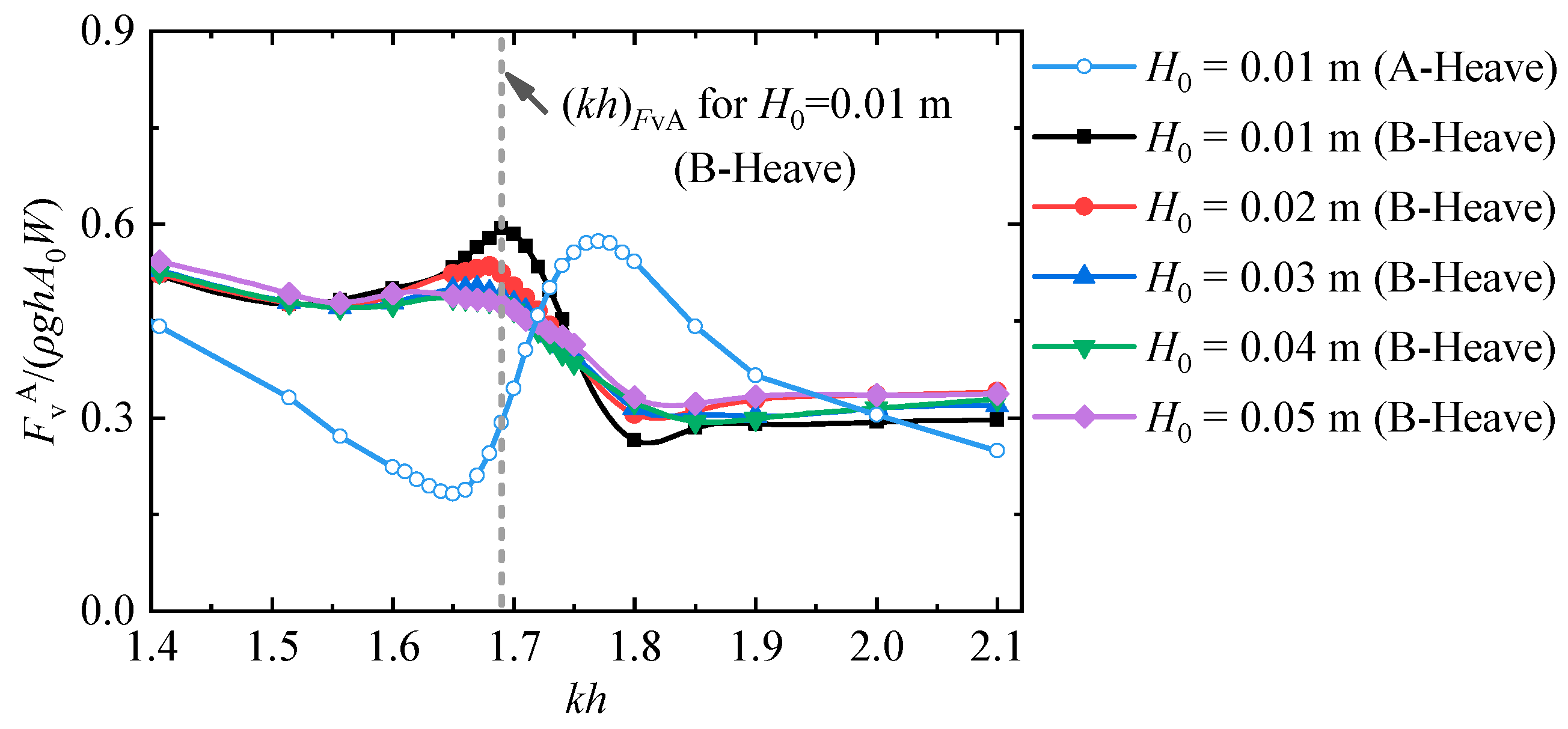
4.3. Vertical Wave Forces on Box A
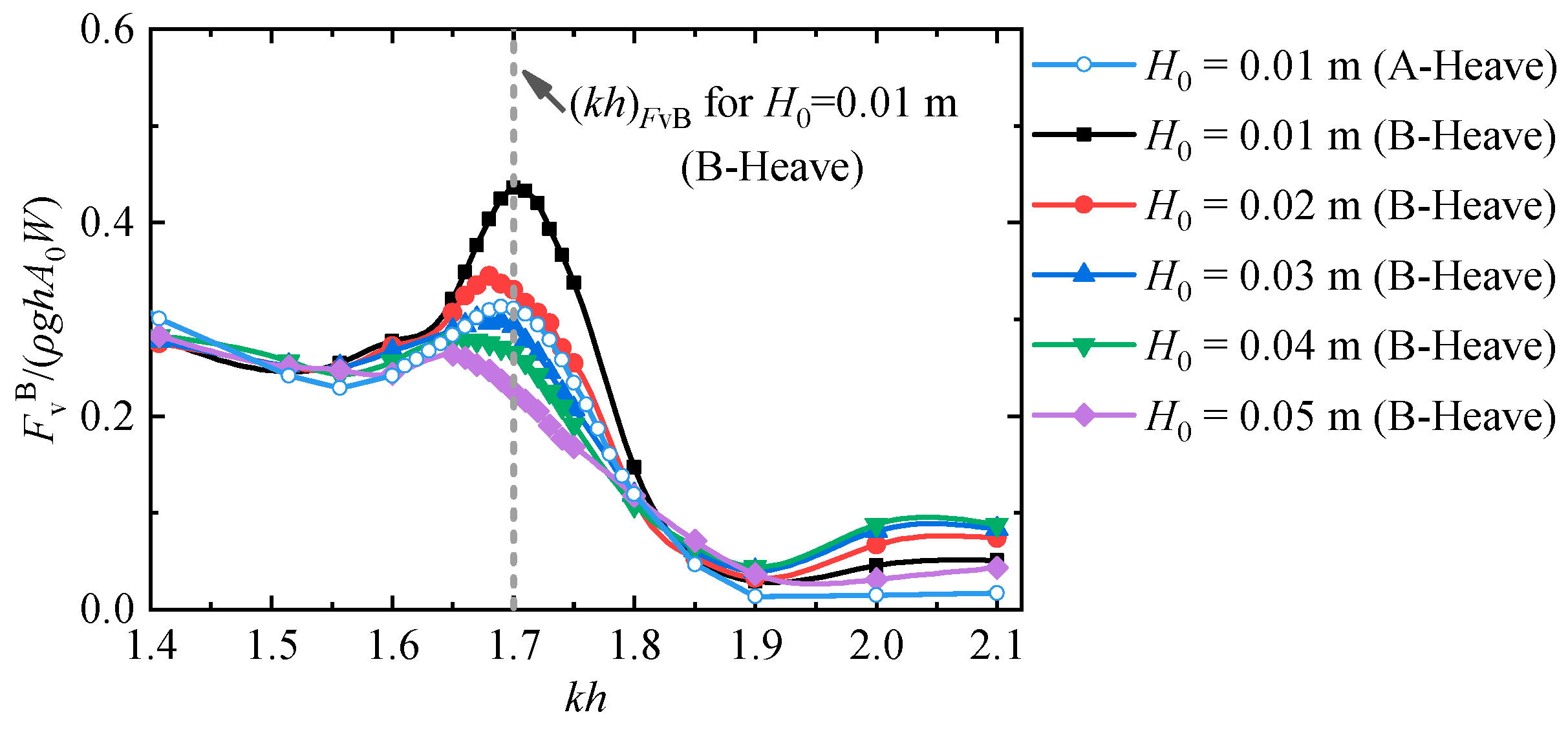
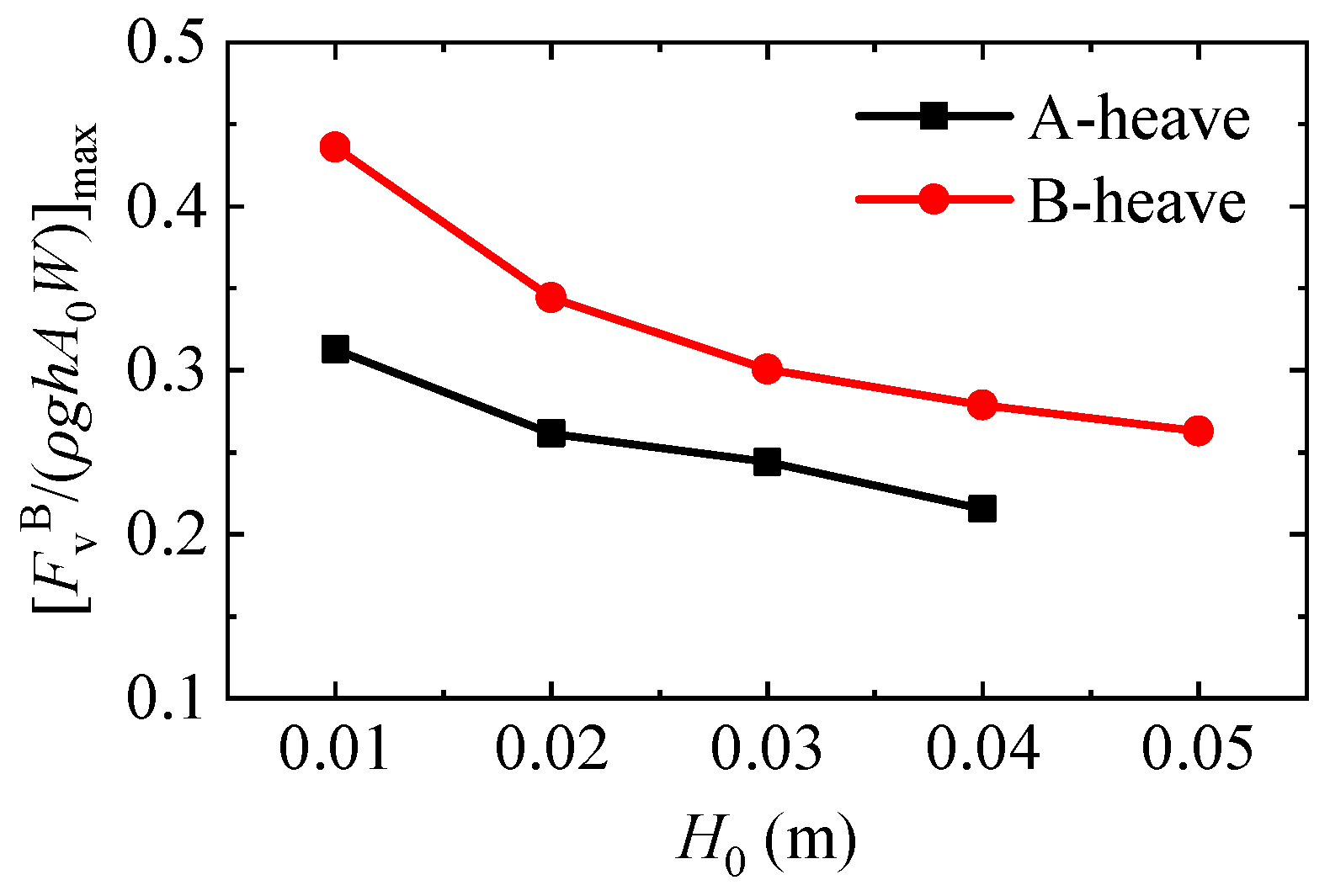
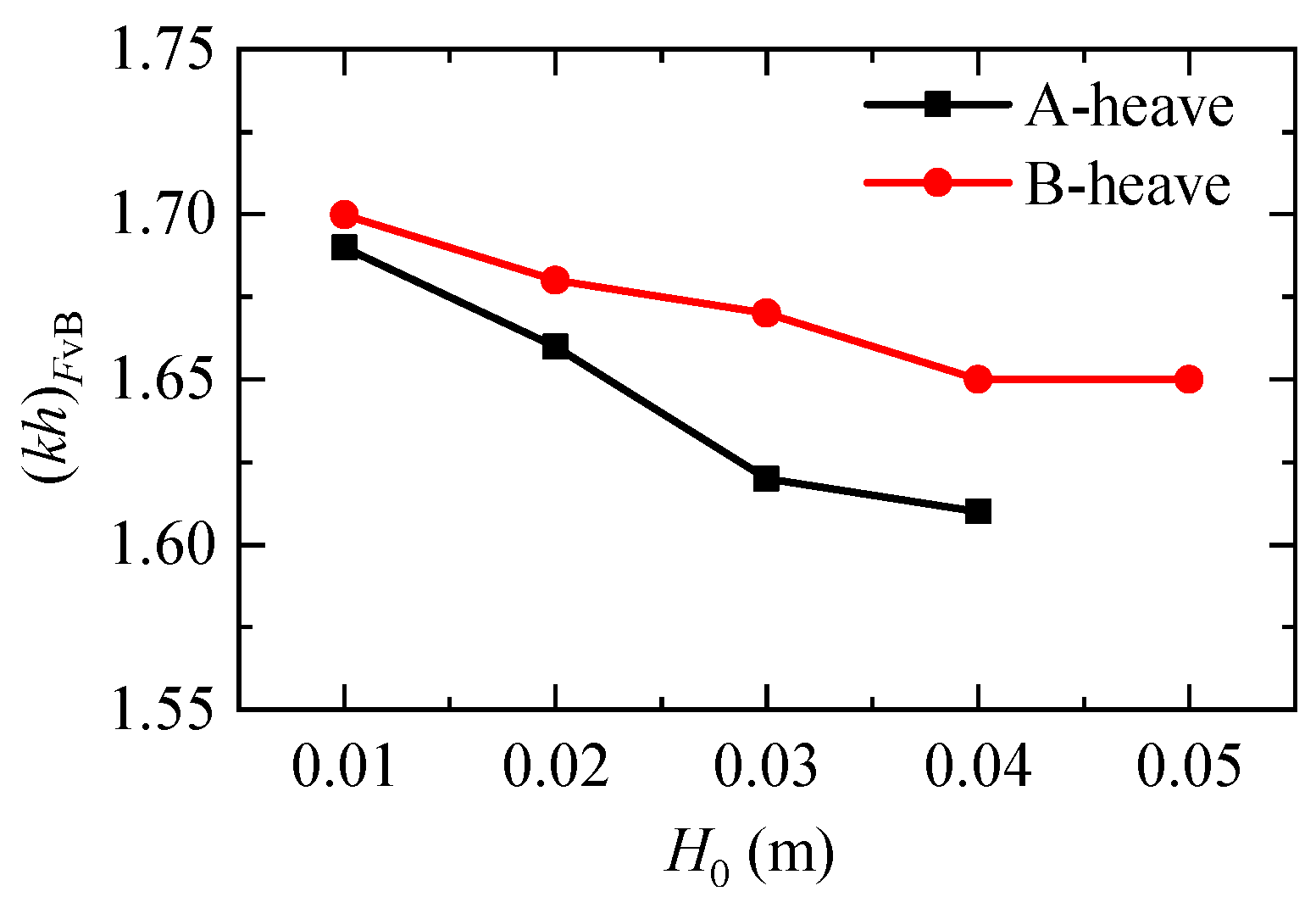
4.4. Vertical Wave Forces on Box B
5. Conclusions
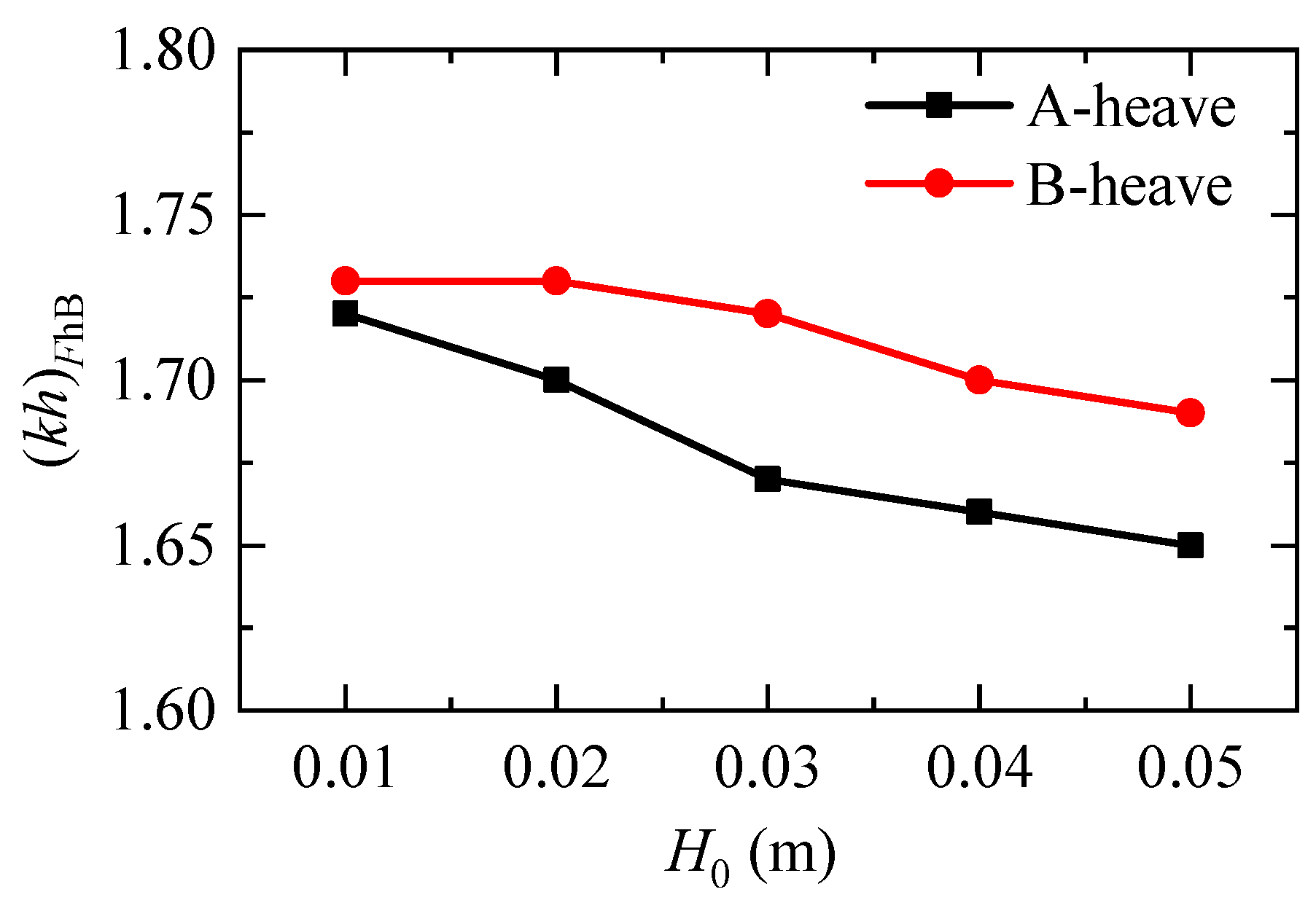
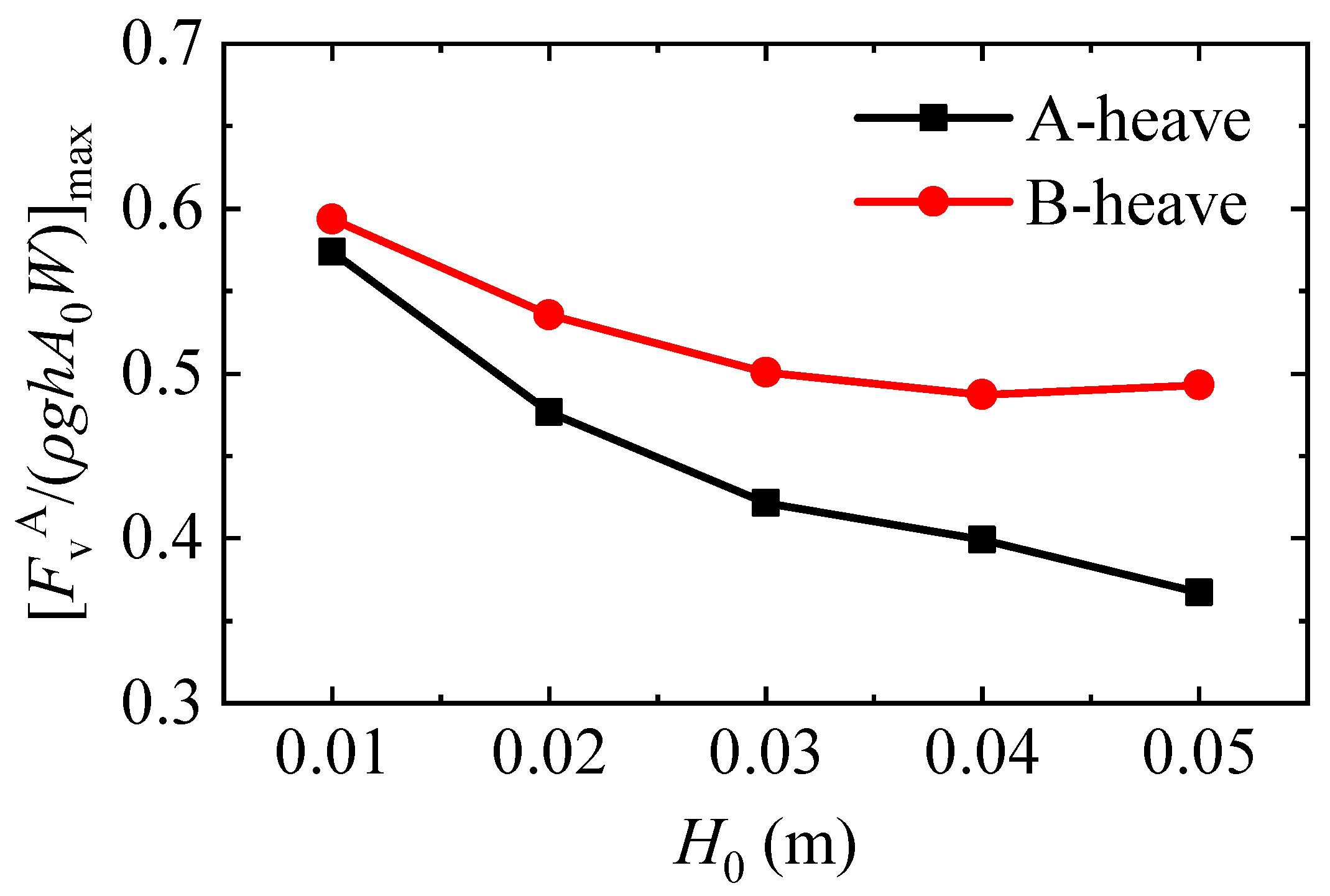
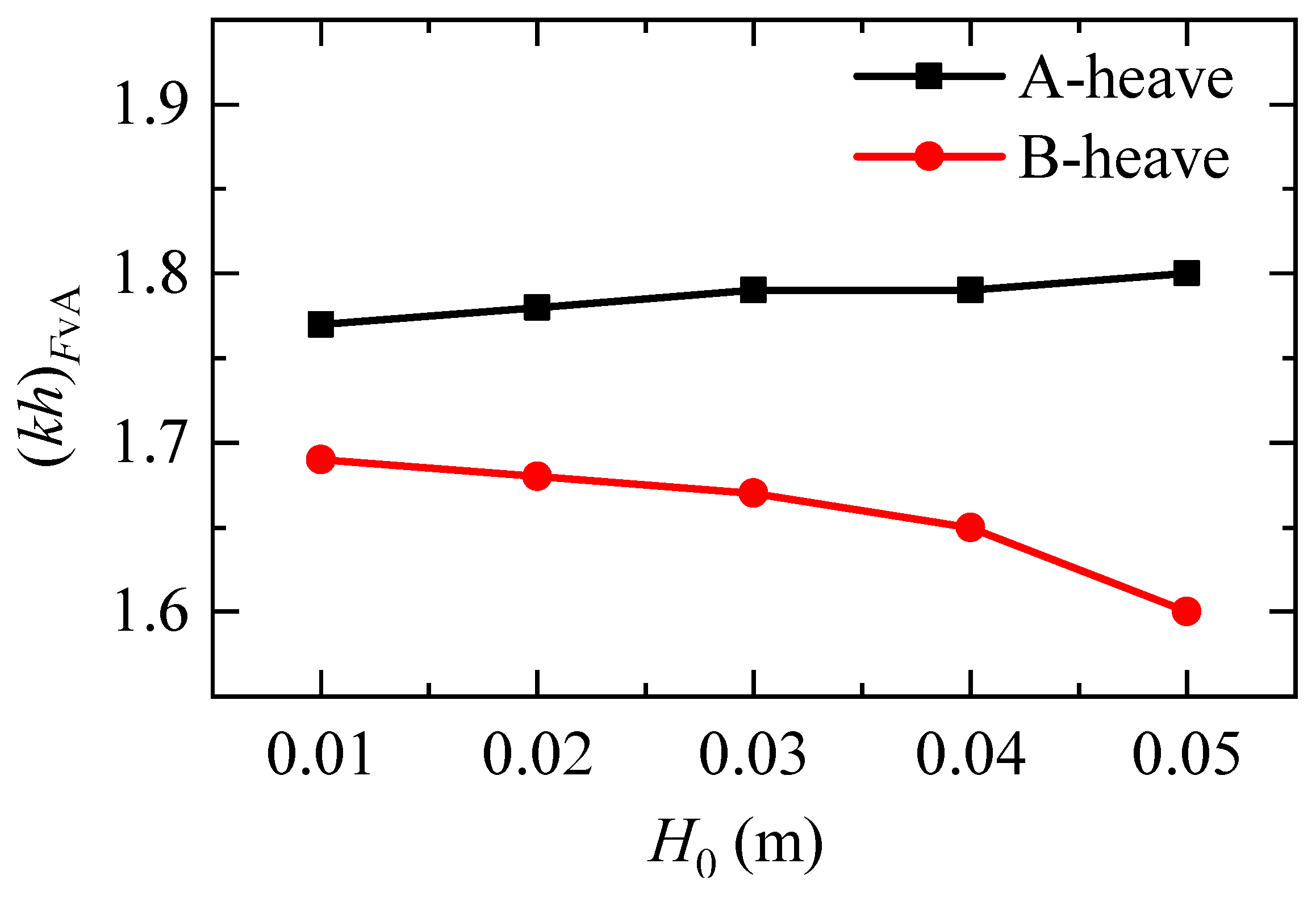
- For the B-Heave structure system, both the normalized largest wave loads and the dimensionless wavenumber where the normalized largest wave loads occur are significantly influenced by the incident wave heights. The normalized largest wave loads acting on both boxes decrease gradually with the increase of the incident wave height, regardless of horizontal wave force or vertical wave force. For the horizontal wave force on Box B and the vertical wave forces on both boxes, the dimensionless wavenumber where the normalized largest wave loads occur decreases gradually with the incident wave height as well. However, for the horizontal wave force on Box A, the former shows an increasing trend as the incident wave height rises.
- The relative position of the heaving box with respect to the incident wave direction has a significant effect on the characteristics of the wave loads exerting on both boxes. This is reflected in the following three aspects. (1) The changing trends of the wave loads on Box A (including the horizontal and the vertical wave forces) with respect to the wavenumber for the A-Heave and the B-Heave structure systems are almost anti-phase to each other. (2) Compared to the heave motion of the upriver box, the motion of the downriver box causes smaller maximum horizontal wave forces but larger maximum vertical wave forces exerting on both boxes. Furthermore, except for the vertical wave forces on Box A, the motion of the downriver box always results in a significant increase of the dimensionless wavenumber where the largest wave load appears. While for the vertical wave forces on Box A, the former leads to the opposite phenomenon.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liang, H.; Liu, X.; Chua, K.H.; de Mello, P.C.; Choo, Y.S. Wave actions on side-by-side barges with sloshing effects: Fixed-free arrangement. Flow 2022, 2, E20. [Google Scholar] [CrossRef]
- Jiang, S.-C.; Bai, W. Coupling analysis for sway motion box with internal liquid sloshing under wave actions. Phys. Fluids 2020, 32, 072106. [Google Scholar] [CrossRef]
- Gao, J.; Ma, X.; Dong, G.; Chen, H.; Liu, Q.; Zang, J. Investigation on the effects of Bragg reflection on harbor oscillations. Coast. Eng. 2021, 170, 103977. [Google Scholar] [CrossRef]
- Gao, J.; Ma, X.; Zang, J.; Dong, G.; Ma, X.; Zhu, Y.; Zhou, L. Numerical investigation of harbor oscillations induced by focused transient wave groups. Coast. Eng. 2020, 158, 103670. [Google Scholar] [CrossRef]
- Li, J.Y.; Liu, Z.; Liao, S.J.; Borthwick, A.G. Steady-state harmonic resonance of periodic interfacial waves with free-surface boundary conditions based on the homotopy analysis method. J. Fluid Mech. 2021, 916, A58. [Google Scholar] [CrossRef]
- Li, J.Y.; Liu, Z.; Liao, S.J.; Borthwick, A.G. Steady-state multiple near resonances of periodic interfacial waves with rigid boundary. Phys. Fluids 2020, 32, 087104. [Google Scholar] [CrossRef]
- Miao, G.; Saitoh, T.; Ishida, H. Water wave interaction of twin large scale caissons with a small gap between. Coast. Eng. J. 2001, 43, 39–58. [Google Scholar] [CrossRef]
- Molin, B. On the piston and sloshing modes in moonpools. J. Fluid Mech. 2001, 430, 27–50. [Google Scholar] [CrossRef]
- Saitoh, T.; Miao, G.; Ishida, H. Theoretical analysis on appearance condition of fluid resonance in a narrow gap between two modules of very large floating structure. In Proceedings of the 3rd Asia-Pacific Workshop on Marine Hydrodynamics, Shanghai, China, 27–28 June 2006; pp. 170–175. [Google Scholar]
- Ning, D.; Zhu, Y.; Zhang, C.; Zhao, M. Experimental and numerical study on wave response at the gap between two barges of different draughts. Appl. Ocean. Res. 2018, 77, 14–25. [Google Scholar] [CrossRef]
- Tan, L.; Lu, L.; Tang, G.Q.; Cheng, L.; Chen, X.B. A viscous damping model for piston mode resonance. J. Fluid Mech. 2019, 871, 510–533. [Google Scholar] [CrossRef]
- Kristiansen, T.; Faltinsen, O.M. Studies on resonant water motion between a ship and a fixed terminal in shallow water. J. Offshore Mech. Arct. Eng. 2009, 131, 021102. [Google Scholar] [CrossRef]
- Liu, Y.; Li, H.-j.; Lu, L.; Li, A.-j.; Tan, L. A semi-analytical potential solution for wave resonance in gap between floating box and vertical wall. China Ocean. Eng. 2020, 34, 747–759. [Google Scholar] [CrossRef]
- Faltinsen, O.M.; Rognebakke, O.F.; Timokha, A.N. Two-dimensional resonant piston-like sloshing in a moonpool. J. Fluid Mech. 2007, 575, 359–397. [Google Scholar] [CrossRef] [Green Version]
- Jiang, S.-C.; Liu, H.; Sun, T.-Z.; Gu, Q. Numerical simulation for hydrodynamic behavior of box-systems with and without narrow gaps. Ocean. Eng. 2020, 214, 107698. [Google Scholar] [CrossRef]
- Tan, L.; Tang, G.-q.; Zhou, Z.-b.; Cheng, L.; Chen, X.; Lu, L. Theoretical and numerical investigations of wave resonance between two floating bodies in close proximity. J. Hydrodyn. Ser. B 2017, 29, 805–816. [Google Scholar] [CrossRef]
- Ning, D.; Su, X.; Zhao, M.; Teng, B. Hydrodynamic difference of rectangular-box systems with and without narrow gaps. J. Eng. Mech. 2015, 141, 04015023. [Google Scholar] [CrossRef]
- Lu, L.; Cheng, L.; Teng, B.; Sun, L. Numerical simulation and comparison of potential flow and viscous fluid models in near trapping of narrow gaps. J. Hydrodyn. Ser. B 2010, 22, 120–125. [Google Scholar] [CrossRef]
- Chen, X.B. Hydrodynamics in Offshore and Naval Applications (Keynote lecture). In Proceedings of the 6th International Conference on Hydrodynamics, Perth, Austrilia, 24–26 November 2004. [Google Scholar]
- Liang, H.; Chua, K.-H.; Wang, H.-C.; Choo, Y.S. Numerical and experimental investigations into fluid resonance in a gap between two side-by-side vessels. Appl. Ocean. Res. 2021, 111, 102581. [Google Scholar] [CrossRef]
- Moradi, N.; Zhou, T.; Cheng, L. Effect of inlet configuration on wave resonance in the narrow gap of two fixed bodies in close proximity. Ocean. Eng. 2015, 103, 88–102. [Google Scholar] [CrossRef]
- He, G.; Chen, L.; Zhang, J.; Wang, X. Hydrodynamic resonance of three identical rectangular boxes with narrow gaps by a CIP method. Int. J. Offshore Polar Eng. 2019, 29, 437–445. [Google Scholar] [CrossRef]
- Gao, J.; Chen, H.; Zang, J.; Chen, L.; Wang, G.; Zhu, Y. Numerical investigations of gap resonance excited by focused transient wave groups. Ocean. Eng. 2020, 212, 107628. [Google Scholar] [CrossRef]
- Feng, X.; Bai, W. Wave resonances in a narrow gap between two barges using fully nonlinear numerical simulation. Appl. Ocean. Res. 2015, 50, 119–129. [Google Scholar] [CrossRef]
- Zhao, W.; Pan, Z.; Lin, F.; Li, B.; Taylor, P.H.; Efthymiou, M. Estimation of gap resonance relevant to side-by-side offloading. Ocean. Eng. 2018, 153, 1–9. [Google Scholar] [CrossRef]
- Zhao, W.; Taylor, P.H.; Wolgamot, H.A.; Eatock Taylor, R. Gap resonance from linear to quartic wave excitation and the structure of nonlinear transfer functions. J. Fluid Mech. 2021, 926, A3. [Google Scholar] [CrossRef]
- Gao, J.; He, Z.; Zang, J.; Chen, Q.; Ding, H.; Wang, G. Topographic effects on wave resonance in the narrow gap between fixed box and vertical wall. Ocean. Eng. 2019, 180, 97–107. [Google Scholar] [CrossRef]
- Gao, J.; He, Z.; Zang, J.; Chen, Q.; Ding, H.; Wang, G. Numerical investigations of wave loads on fixed box in front of vertical wall with a narrow gap under wave actions. Ocean. Eng. 2020, 206, 107323. [Google Scholar] [CrossRef]
- Liu, J.; Gao, J.; Shi, H.; Zang, J.; Liu, Q. Investigations on the second-order transient gap resonance induced by focused wave groups. Ocean. Eng. 2022, 263, 112430. [Google Scholar] [CrossRef]
- He, Z.; Gao, J.; Chen, H.; Zang, J.; Liu, Q.; Wang, G. Harmonic analyses of hydrodynamic characteristics for gap resonance between fixed box and vertical wall. China Ocean. Eng. 2021, 35, 712–723. [Google Scholar] [CrossRef]
- Yin, Y.; Jiang, S.-C.; Geng, B.-L. Fluid resonance in the narrow gap for a box close to a bottom-mounted wall with permeable bed. Ocean. Eng. 2022, 258, 111726. [Google Scholar] [CrossRef]
- Ding, Y.; Walther, J.H.; Shao, Y. Higher-order gap resonance between two identical fixed barges: A study on the effect of water depth. Phys. Fluids 2022, 34, 052113. [Google Scholar] [CrossRef]
- Zou, M.; Chen, M.; Zhu, L.; Li, L.; Zhao, W. A constant parameter time domain model for dynamic modelling of multi-body system with strong hydrodynamic interactions. Ocean. Eng. 2023, 268, 113376. [Google Scholar] [CrossRef]
- Li, Y. Fully nonlinear analysis of second-order gap resonance between two floating barges. Eng. Anal. Bound. Elem. 2019, 106, 1–19. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, C. Analysis of wave resonance in gap between two heaving barges. Ocean. Eng. 2016, 117, 210–220. [Google Scholar] [CrossRef]
- He, G.; Jing, P.; Jin, R.; Zhang, W.; Zhang, J.; Liu, T. Two-dimensional numerical study on fluid resonance in the narrow gap between two rigid-connected heave boxes in waves. Appl. Ocean. Res. 2021, 110, 102628. [Google Scholar] [CrossRef]
- Gao, J.; He, Z.; Huang, X.; Liu, Q.; Zang, J.; Wang, G. Effects of free heave motion on wave resonance inside a narrow gap between two boxes under wave actions. Ocean. Eng. 2021, 224, 108753. [Google Scholar] [CrossRef]
- He, Z.; Gao, J.; Shi, H.; Zang, J.; Chen, H.; Liu, Q. Investigation on effects of vertical degree of freedom on gap resonance between two side-by-side boxes under wave actions. China Ocean. Eng. 2022, 36, 403–412. [Google Scholar] [CrossRef]
- Gao, J.-L.; Lyu, J.; Wang, J.-H.; Zhang, J.; Liu, Q.; Zang, J.; Zou, T. Study on Transient Gap Resonance with Consideration of the Motion of Floating Body. China Ocean. Eng. 2022, 36, 994–1006. [Google Scholar] [CrossRef]
- Li, S.; Teng, B. Numerical examination of wave-induced coupling roll motion and fluid resonance between twin floating barges in proximity. Procedia Eng. 2015, 126, 242–246. [Google Scholar] [CrossRef] [Green Version]
- Lu, L.; Tan, L.; Zhou, Z.; Zhao, M.; Ikoma, T. Two-dimensional numerical study of gap resonance coupling with motions of floating body moored close to a bottom-mounted wall. Phys. Fluids 2020, 32, 092101. [Google Scholar] [CrossRef]
- He, Z.; Gao, J.; Zang, J.; Chen, H.; Liu, Q.; Wang, G. Effects of free heave motion on wave forces on two side-by-side boxes in close proximity under wave actions. China Ocean. Eng. 2021, 35, 490–503. [Google Scholar] [CrossRef]
- Bruinsma, N.; Paulsen, B.T.; Jacobsen, N.G. Validation and application of a fully nonlinear numerical wave tank for simulating floating offshore wind turbines. Ocean. Eng. 2018, 147, 647–658. [Google Scholar] [CrossRef]
- Jacobsen, N.G.; Fuhrman, D.R.; Fredsøe, J. A wave generation toolbox for the open-source CFD library: OpenFoam®. Int. J. Numer. Methods Fluids 2012, 70, 1073–1088. [Google Scholar] [CrossRef]
- Lauria, A.; Alfonsi, G.; Tafarojnoruz, A. Flow Pressure Behavior Downstream of Ski Jumps. Fluids 2020, 5, 168. [Google Scholar] [CrossRef]
- Tafarojnoruz, A.; Lauria, A. Large eddy simulation of the turbulent flow field around a submerged pile within a scour hole under current condition. Coast. Eng. J. 2020, 62, 489–503. [Google Scholar] [CrossRef]
- Jasak, H. Error Analysis and Estimation in the Finite Volume Method with Applications to Fluid Flows. Ph.D. Thesis, Imperial College, London, UK, 1996. [Google Scholar]
- Gao, J.; Zang, J.; Chen, L.; Chen, Q.; Ding, H.; Liu, Y. On hydrodynamic characteristics of gap resonance between two fixed bodies in close proximity. Ocean. Eng. 2019, 173, 28–44. [Google Scholar] [CrossRef]
- Jiang, S.-C.; Bai, W.; Yan, B. Higher-order harmonic induced wave resonance for two side-by-side boxes in close proximity. Phys. Fluids 2021, 33, 102113. [Google Scholar] [CrossRef]
- Moradi, N.; Zhou, T.; Cheng, L. Two-dimensional numerical study on the effect of water depth on resonance behaviour of the fluid trapped between two side-by-side bodies. Appl. Ocean. Res. 2016, 58, 218–231. [Google Scholar] [CrossRef] [Green Version]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mesh | No. of Cells | No. of Points | No. of Faces | Size of Cells across the Gap (m) | |
|---|---|---|---|---|---|
| Δx | Δz | ||||
| Coarse | 79,850 | 161,548 | 320,325 | 0.0050 | 0.0040 |
| Medium | 211,960 | 426,970 | 849,366 | 0.0031 | 0.0020 |
| Fine | 317,400 | 638,338 | 1,271,370 | 0.0025 | 0.0016 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, J.; Gong, S.; He, Z.; Shi, H.; Zang, J.; Zou, T.; Bai, X. Study on Wave Loads during Steady-State Gap Resonance with Free Heave Motion of Floating Structure. J. Mar. Sci. Eng. 2023, 11, 448. https://doi.org/10.3390/jmse11020448
Gao J, Gong S, He Z, Shi H, Zang J, Zou T, Bai X. Study on Wave Loads during Steady-State Gap Resonance with Free Heave Motion of Floating Structure. Journal of Marine Science and Engineering. 2023; 11(2):448. https://doi.org/10.3390/jmse11020448
Chicago/Turabian StyleGao, Junliang, Shukai Gong, Zhiwei He, Huabin Shi, Jun Zang, Tao Zou, and Xu Bai. 2023. "Study on Wave Loads during Steady-State Gap Resonance with Free Heave Motion of Floating Structure" Journal of Marine Science and Engineering 11, no. 2: 448. https://doi.org/10.3390/jmse11020448