
Classification of Hull Blocks of Ships Using CNN with Multi-View Image Set from 3D CAD Data


Abstract
:1. Introduction
2. Related Work
2.1. Tracking Location of Ship Blocks
2.2. Object Identification Using 3D CAD Data
3. Convolutional Neural Network
3.1. CNN Model
3.2. Transfer Learning
3.3. Customized CNN Model
4. Experimental Results
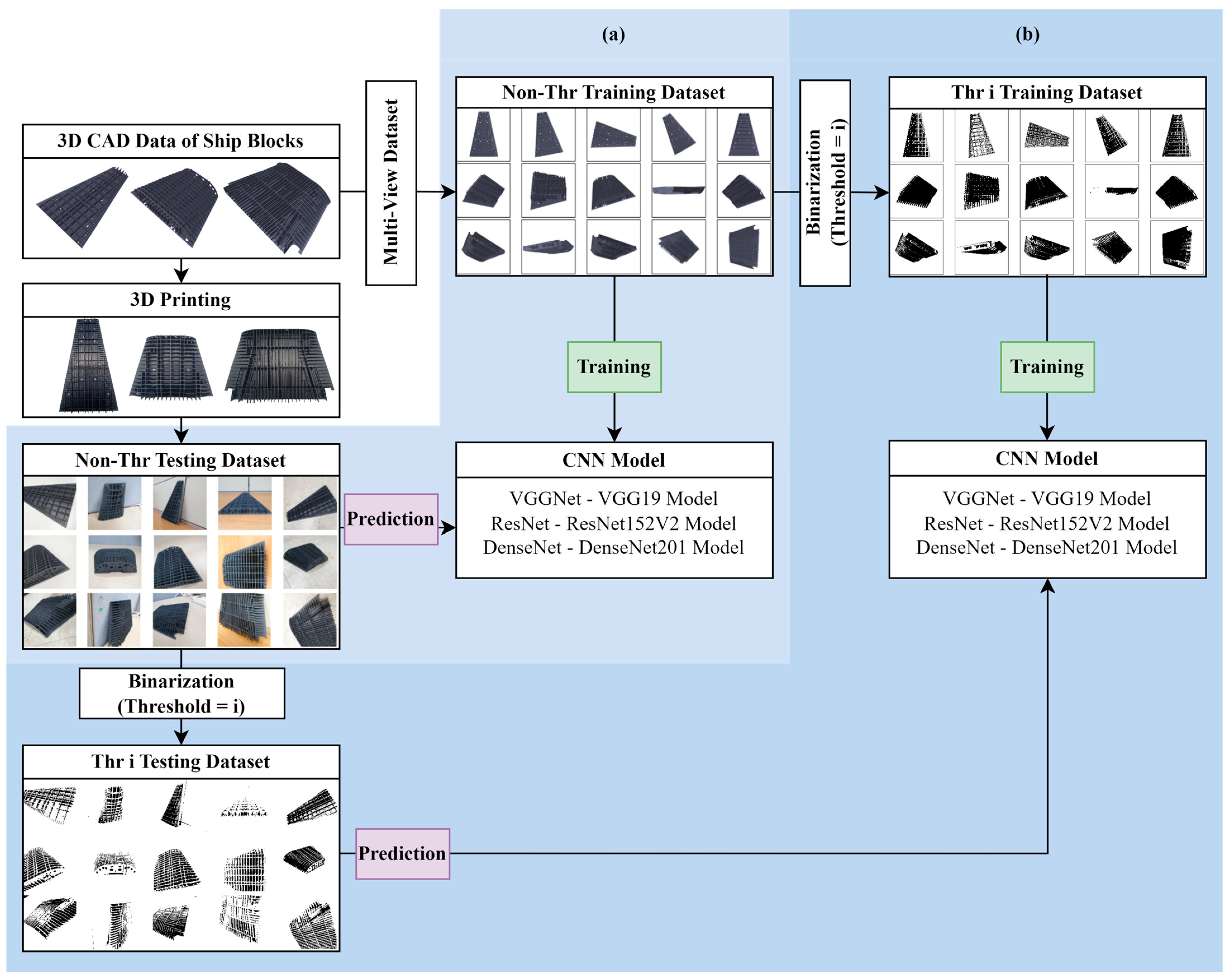
4.1. Configuring the Non-Thr Datasets
4.1.1. Non-Thr Training Datasets
4.1.2. Non-Thr Testing Datasets
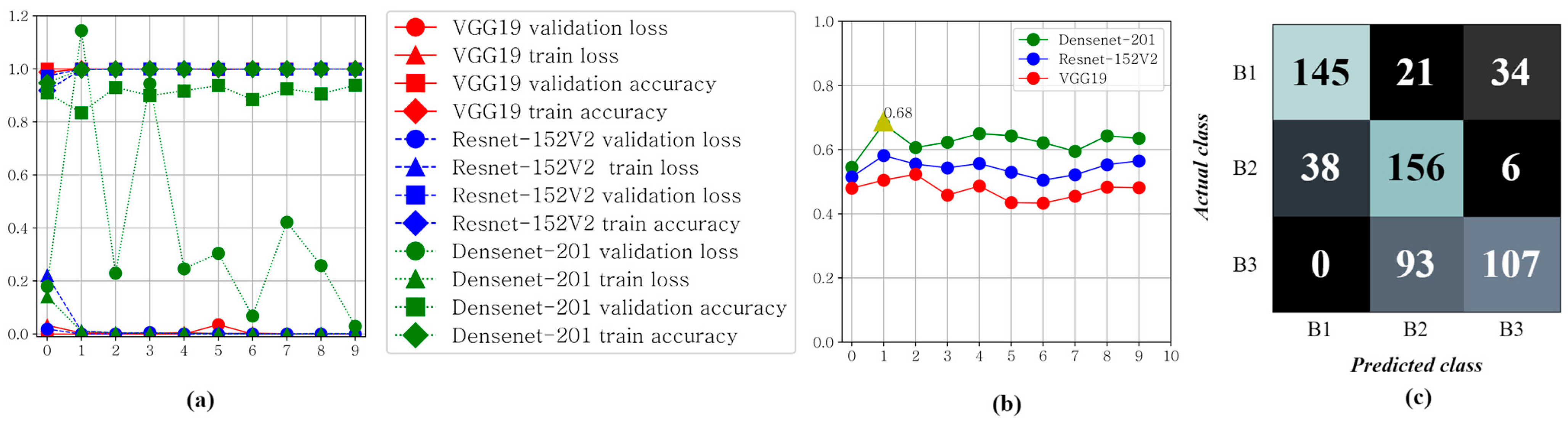
4.1.3. Experimantal Result of Non-Thr Datasets
4.2. Configuring the Thr Datasets
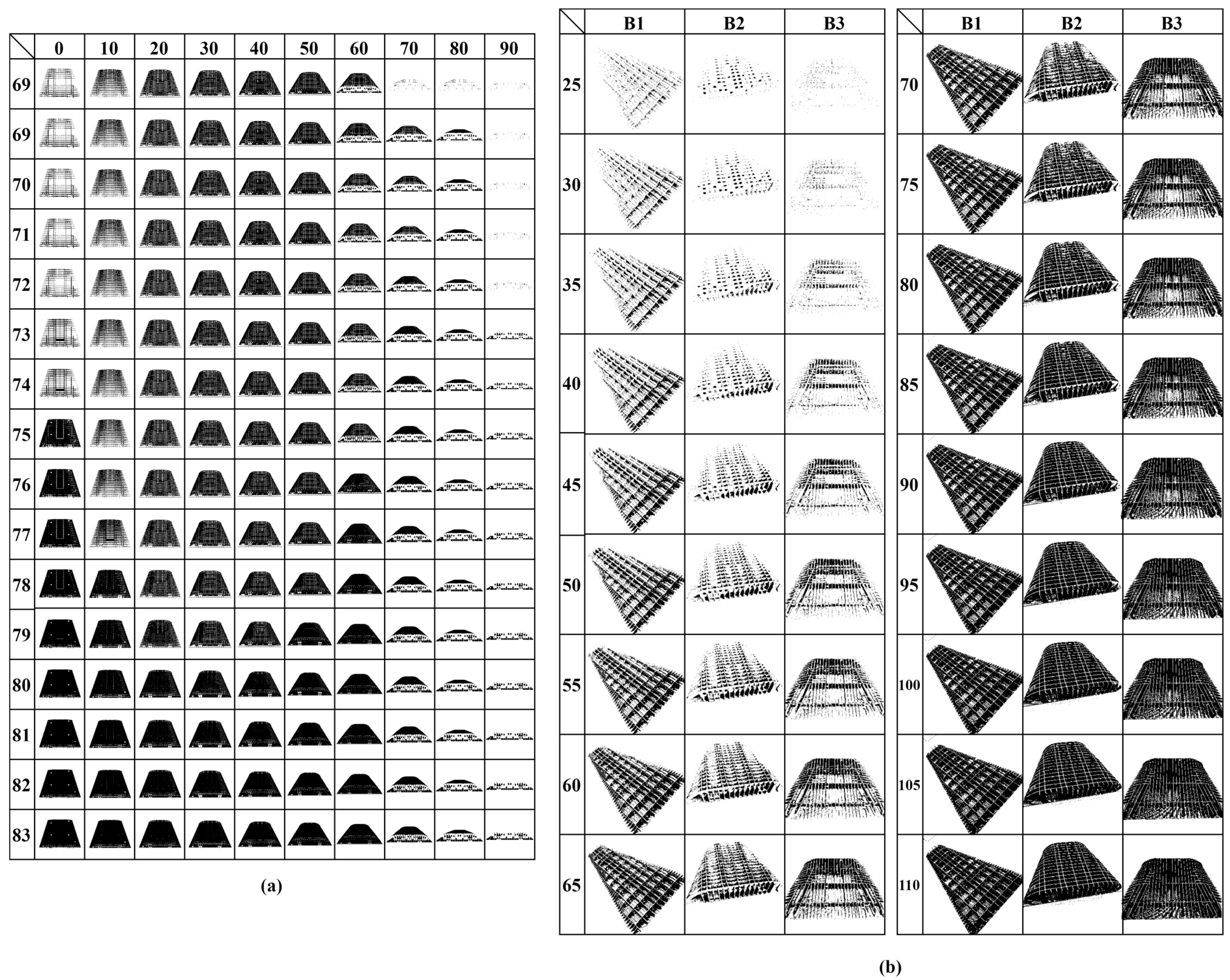
4.2.1. Thr Training Datasets
4.2.2. Experimental Results with Thr Datasets
4.3. Analysis of Classification Performance between Non-Thr and Thr
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kim, M.S.; Cha, J.H.; Cho, D.Y. Determination of arrangement and take-out path in ship block stockyard considering available space and obstructive block. Soc. Comput. Des. Eng. 2013, 1, 433–438. [Google Scholar]
- Nam, B.W.; Lee, K.H.; Lee, J.J.; Mun, S.H. A Study on Selection of Block Stockyard Applying Decision Tree Learning Algorithm. J. Soc. Nav. Archit. Korea 2017, 54, 421–429. [Google Scholar] [CrossRef]
- Cho, D.Y.; Song, H.C.; Cha, J.H. Block and logistics simulation. Bull. Soc. Nav. Archit. Korea 2011, 48, 24–29. [Google Scholar]
- Shin, J.G.; Lee, J.H. Prototype of block tracing system for pre-erection area using PDA and GPS. J. Soc. Nav. Archit. Korea 2006, 43, 87–95. [Google Scholar]
- Su, H.; Maji, S.; Kalogerakis, E.; Learned-Miller, E. Multi-view convolutional neural networks for 3d shape recognition. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 945–953. [Google Scholar]
- Lee, Y.H.; Lee, K.C.; Lee, K.J.; Son, Y.D. Study on the Positioning System for Logistics of Ship-block. Spec. Issue Soc. Nav. Archit. Korea 2008, 9, 68–75. [Google Scholar]
- Kim, J.O.; Baek, T.H.; Ha, S.J.; Lee, S.H.; Jeong, M.Y.; Min, S.K.; Kim, D.S.; Hwang, S.Y. Development of real time location measuring and logistics system for assembled block in shipbuilding. In Proceedings of the Industrial Engineering and Management Systems Conference, Pusan, Republic of Korea, 22–23 May 2009; pp. 834–839. [Google Scholar]
- Park, J.H.; Lee, K.H.; Jin, G.J.; Oh, M.K. Loading/unloading decision system of ship block in the shipyard. J. Inst. Electron. Eng. Korea CI 2010, 47, 40–46. [Google Scholar]
- Kang, J.H. A Study on Mobile Block Logistics System for Shipyard. Master’s Thesis, Mokpo National University, Mokpo, Republic of Korea, 2014. [Google Scholar]
- Mun, S.H. Real Time Block Locating System for Shipbuilding through GNSS and IMU Fusion. Ph.D. Thesis, Pusan National University, Busan, Republic of Korea, 2019. [Google Scholar]
- Chon, H.; Noh, J. Comparison Study of the Performance of CNN Models with Multi-view Image Set on the Classification of Ship Hull Blocks. J. Soc. Nav. Archit. Korea 2020, 57, 140–151. [Google Scholar] [CrossRef]
- Riegler, G.; Osman Ulusoy, A.; Geiger, A. Octnet: Learning deep 3d representations at high resolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 3577–3586. [Google Scholar]
- Liu, Z.; Tang, H.; Lin, Y.; Han, S. Point-voxel cnn for efficient 3d deep learning. arXiv 2019, arXiv:1907.03739. [Google Scholar]
- Chon, H. Identification of Ship Hull Blocks using Convolutional Neural Network with Multi-View Image Set of 3D CAD Data. Master’s Thesis, Kunsan National University, Gunsan, Republic of Korea, 2020. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. In Proceedings of the 3rd International Conference on Learning Representations, ICLR 2015-Conference Track Proceedings, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Huang, G.; Liu, Z.; Van Der Maaten, L.; Weinberger, K.Q. Densely connected convolutional networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4700–4708. [Google Scholar]
- Ribani, R.; Marengoni, M. A survey of transfer learning for convolutional neural networks. In Proceedings of the 2019 32nd SIBGRAPI Conference on Graphics, Patterns and Images Tutorials (SIBGRAPI-T), Rio de Janeiro, Brazil, 28–31 October 2019; pp. 47–57. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Selvaraju, R.R.; Cogswell, M.; Das, A.; Vedantam, R.; Parikh, D.; Batra, D. Grad-cam: Visual explanations from deep networks via gradient-based localization. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 618–626. [Google Scholar]
- Le, N.; Moon, J.; Lowe, C.; Kim, H.; Choi, S. An Automated Framework Based on Deep Learning for Shark Recognition. J. Mar. Sci. Eng. 2022, 10, 942. [Google Scholar] [CrossRef]
- Zhou, B.; Khosla, A.; Lapedriza, A.; Oliva, A.; Torralba, A. Learning deep features for discriminative localization. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2921–2929. [Google Scholar]
- Lin, M.; Chen, Q.; Yan, S.-C. Network in network. arXiv preprint 2013, arXiv:1312.4400. [Google Scholar]
- Labach, A.; Salehinejad, H.; Valaee, S. Survey of dropout methods for deep neural networks. arXiv 2019, arXiv:1904.13310. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Advantages | Disadvantages |
|---|---|---|
| Shin et al. [4] | GPS-based PDA can be used to correct worker errors by entering block locations | Worker with PDA needs to move around and enter block location |
| Lee et al. [6] | Use high-precision, low-cost GPS/INS | Need to install GPS base station to improve GPS precision |
| Kim et al. [7] | Block transport schedule can be established in real time | Need to install RFID tag in stockyard |
| Park et al. [8] | Blocks and transporters can be tracked in real time | Need to install RFID tag in block and stockyard |
| Kang [9] | Reducing the situation of missing block operation information input by replacing dual tasks | Can only manage a single block |
| Mun [10] | Proposed a robust location tracking device and algorithm in a shipyard environment where the radio wave environment is very poor | It is impossible to track the route after unloading the block from the transporter |
| Chon et al. [11] | Using CNN, hull blocks can be automatically identified only with images | Requires actual hull block image |
| VGG-19 | Resnet152V2 | Densenet-201 | |
|---|---|---|---|
| Batch size | 64 | 32 | 16 |
| Learning rate | 0.0002 | 0.0002 | 0.0002 |
| Number of epochs | Non-Thr dataset: 10 Thr dataset: 5 | Non-Thr dataset: 10 Thr dataset: 5 | Non-Thr dataset: 10 Thr dataset: 5 |
| Loss function | Categorical-crossentropy | Categorical-crossentropy | Categorical-crossentropy |
| Optimizer | RMSprop | RMSprop | RMSprop |
| RMSprop rho | 0.9 | 0.9 | 0.9 |
| CNN Model | Training Threshold | Testing Threshold | Epoch | Accuracy |
|---|---|---|---|---|
| Resnet-152V2 | 72 | 50 | 2 | 0.9617 |
| Resnet-152V2 | 72 | 60 | 2 | 0.9617 |
| Resnet-152V2 | 78 | 60 | 2 | 0.9617 |
| Resnet-152V2 | 78 | 65 | 2 | 0.9617 |
| Resnet-152V2 | 73 | 50 | 5 | 0.9617 |
| Resnet-152V2 | 72 | 55 | 2 | 0.9600 |
| Resnet-152V2 | 72 | 45 | 2 | 0.9600 |
| Resnet-152V2 | 73 | 55 | 4 | 0.9600 |
| Resnet-152V2 | 70 | 60 | 3 | 0.9583 |
| VGG-19 | 75 | 60 | 2 | 0.9583 |
| Thr i Training Dataset | Average Predicted Accuracy | Thr i Testing Dataset | Average Predicted Accuracy |
|---|---|---|---|
| Thr 69 training dataset | 0.7169 | Thr 25 testing dataset | 0.5320 |
| Thr 70 training dataset | 0.8477 | Thr 30 testing dataset | 0.6233 |
| Thr 71 training dataset | 0.8229 | Thr 35 testing dataset | 0.7168 |
| Thr 72 training dataset | 0.8826 | Thr 40 testing dataset | 0.7817 |
| Thr 73 training dataset | 0.8566 | Thr 45 testing dataset | 0.8192 |
| Thr 74 training dataset | 0.8311 | Thr 50 testing dataset | 0.8383 |
| Thr 75 training dataset | 0.8513 | Thr 55 testing dataset | 0.8459 |
| Thr 76 training dataset | 0.8304 | Thr 60 testing dataset | 0.8452 |
| Thr 77 training dataset | 0.8238 | Thr 65 testing dataset | 0.8401 |
| Thr 78 training dataset | 0.8440 | Thr 70 testing dataset | 0.8377 |
| Thr 79 training dataset | 0.8730 | Thr 75 testing dataset | 0.8350 |
| Thr 80 training dataset | 0.6767 | Thr 80 testing dataset | 0.8336 |
| Thr 81 training dataset | 0.7126 | Thr 85 testing dataset | 0.8300 |
| Thr 82 training dataset | 0.6694 | Thr 90 testing dataset | 0.8243 |
| Thr 83 training dataset | 0.6125 | Thr 95 testing dataset | 0.8183 |
| Thr 100 testing dataset | 0.8131 | ||
| Thr 105 testing dataset | 0.7989 | ||
| Thr 110 testing dataset | 0.7814 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chon, H.; Oh, D.; Noh, J. Classification of Hull Blocks of Ships Using CNN with Multi-View Image Set from 3D CAD Data. J. Mar. Sci. Eng. 2023, 11, 333. https://doi.org/10.3390/jmse11020333
Chon H, Oh D, Noh J. Classification of Hull Blocks of Ships Using CNN with Multi-View Image Set from 3D CAD Data. Journal of Marine Science and Engineering. 2023; 11(2):333. https://doi.org/10.3390/jmse11020333
Chicago/Turabian StyleChon, Haemyung, Daekyun Oh, and Jackyou Noh. 2023. "Classification of Hull Blocks of Ships Using CNN with Multi-View Image Set from 3D CAD Data" Journal of Marine Science and Engineering 11, no. 2: 333. https://doi.org/10.3390/jmse11020333