

Features of Seismological Observations in the Arctic Seas


 , ,
, ,
Abstract
:1. Introduction
2. Types of Seismographs for Use in the Arctic Seas
3. Some Observation Results Obtained from the Arctic Seas



4. Features of Seismographs’ Deployment in the Arctic Seas and Seafloor Seismic Records
4.1. Deployment Schemes and Workflows
4.2. Characteristics of Seafloor Seismic Noise
5. Conclusions
- The characteristics of ocean-bottom pop-up and non-pop-up seismographs, as well as stations for deployment on ice, were described in detail. The results of the deployments demonstrated that the characteristics of the stations make it possible to reliably record both high-frequency signals from local earthquakes and low-frequency signals from distant earthquakes on the shelf and continental slope of the Arctic seas.
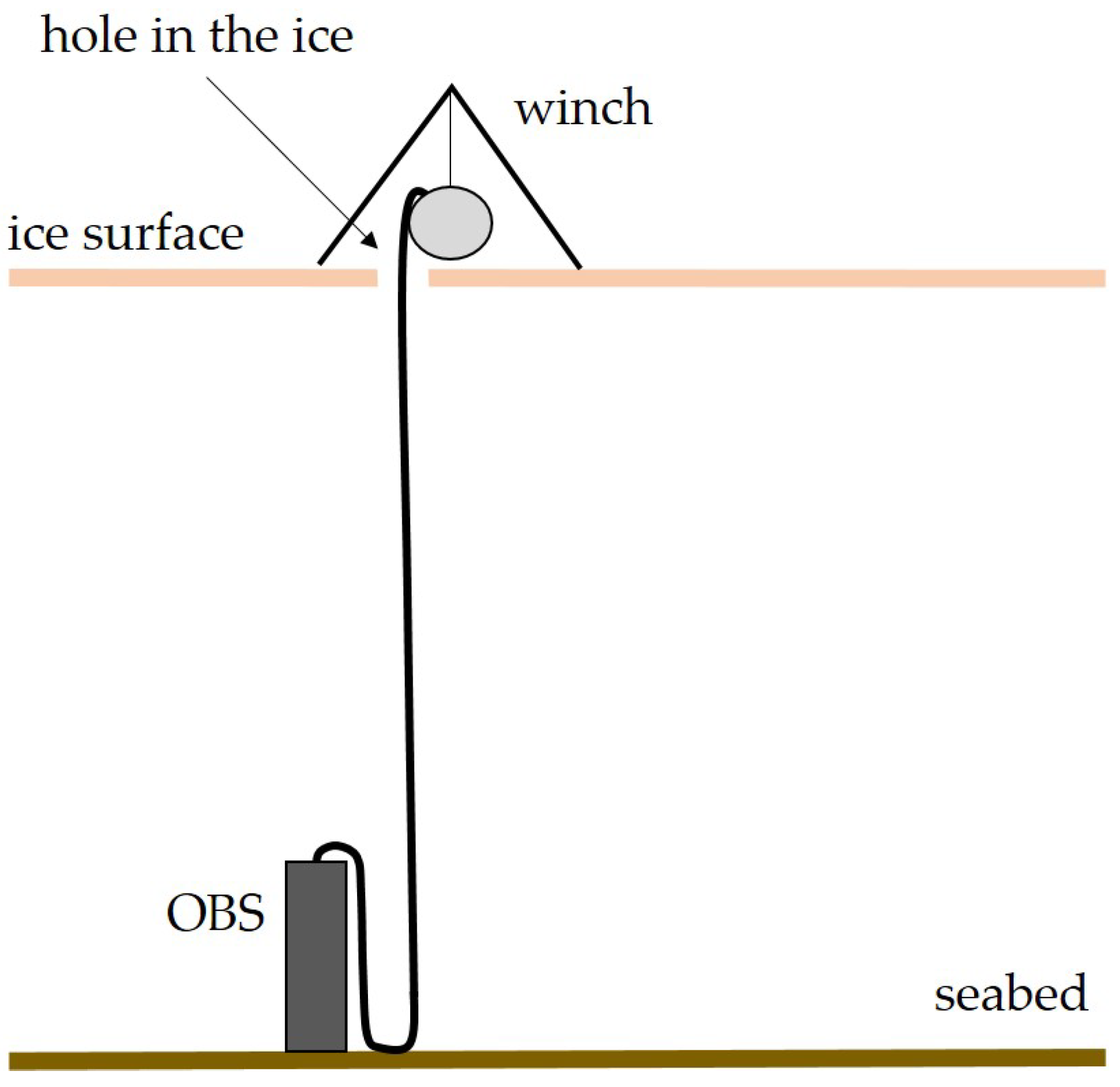
- Various schemes for seismic stations’ deployment were described. It was concluded that the preferred schemes for deploying OBSs are those in which their subsequent dismantling does not depend on their power resources. Usually, such schemes provide for the possibility of dismantling stations via trawling and are suitable for shallow sea depths of up to 100 m. The advantages of such schemes include the possibility of installing additional hydrophysical and hydrobiological equipment, such as ADCP, CTD, thermistors, wave recorders, and biofouling plates.
- The nuances of offshore work on the installation and recovery of equipment were outlined. It was concluded that particular attention should be paid to planning the recovery of seismic stations due to possible difficulties associated with the passage of a vessel to the deployment site due to unfavorable ice conditions. When deploying an OBS, it is advisable to choose the flattest seabed areas. Sandy soils are preferable to clay and silt soils because devices can become bogged down in them. Attention should be paid to avoiding increased galvanic corrosion in places where different metals are attached.
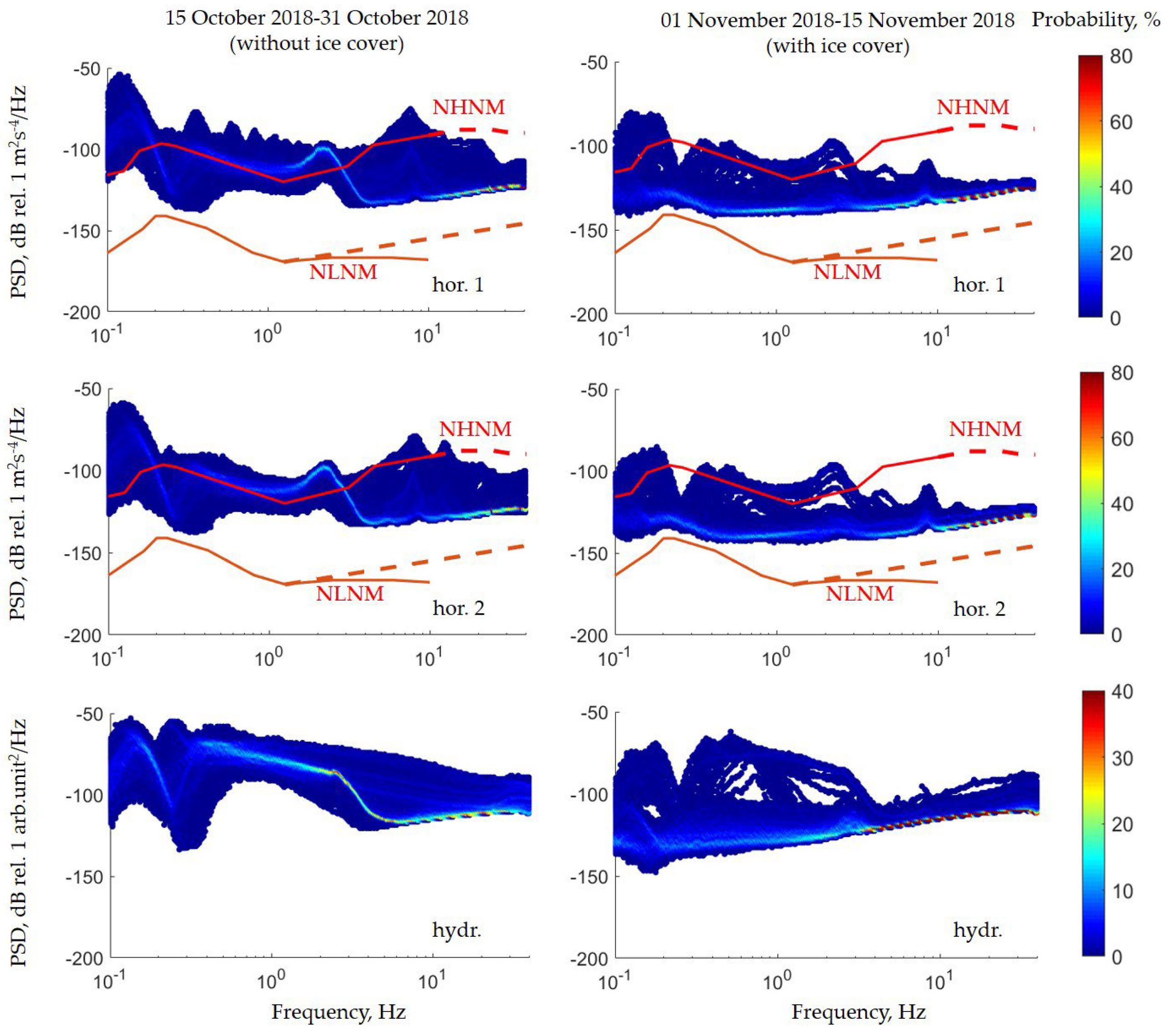
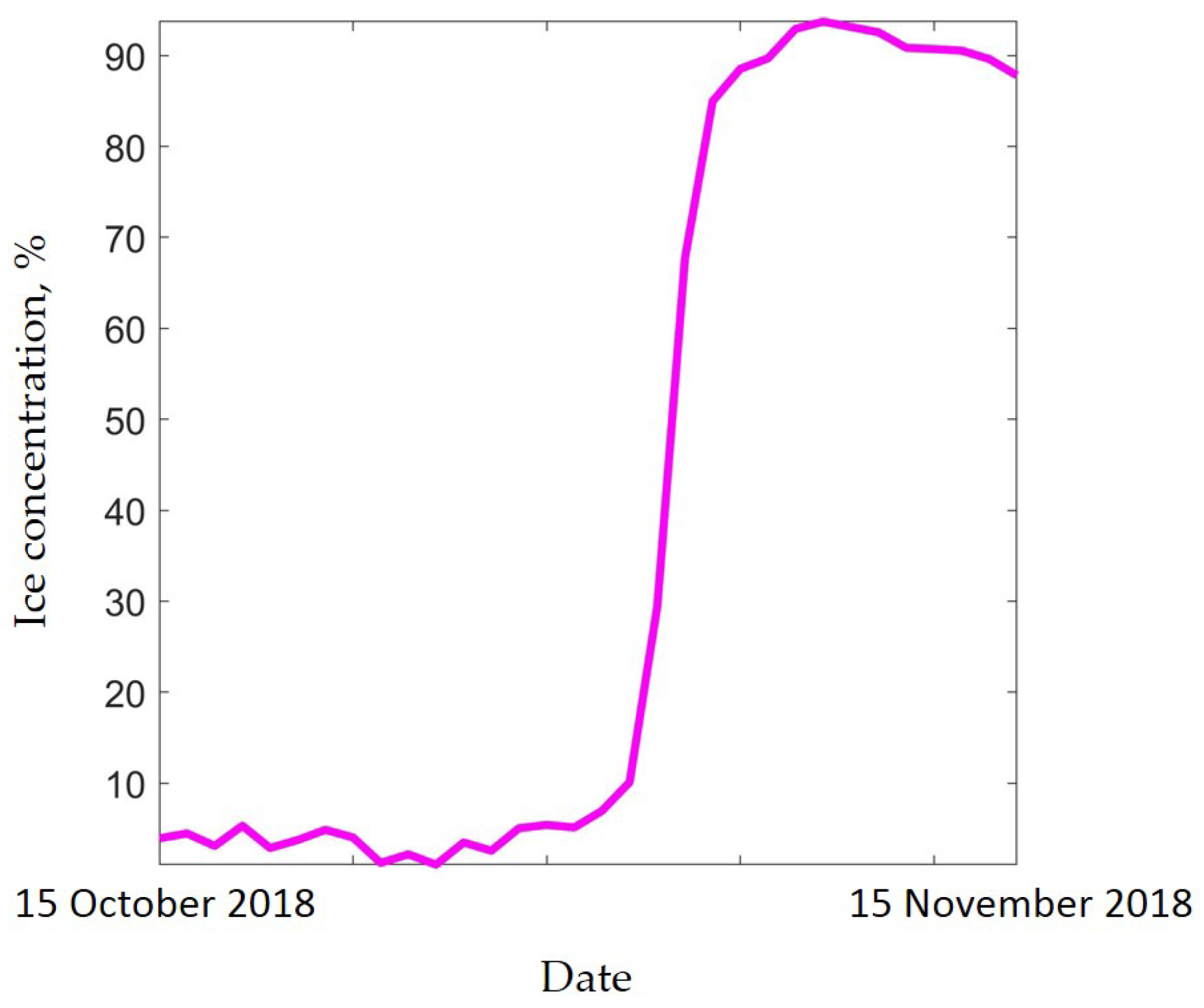
- The features of seabed seismic records in the Arctic seas were demonstrated. It turned out that seabed seismic records are characterized by a high level of noise, especially during periods of time when there is no ice cover. Therefore, it is recommended to deploy OBSs for periods of time when ice cover is present. Seismic noise is caused by wind gravity waves, infragravity waves, and the coupling effect, and it also strongly depends on meteorological conditions, primarily on wind speed. The frequency range of the prevailing noise significantly overlaps with the frequency range of signals from both weak local earthquakes and strong distant ones. This must be taken into account when searching for and processing signals from earthquakes obtained in the Arctic seas.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- OBSIP Experiment Archive. Available online: https://obsic.whoi.edu/experiments/obsip-experiment-archive/ (accessed on 1 October 2023).
- Aderhold, K.; Woodward, R.; Frassetto, A. Ocean Bottom Seismograph Instrument Pool; Final Report; National Science Foundation: Alexandria, VA, USA, 2019; 80p. [Google Scholar]
- SAGE. Seismological Facility for the Advancement of Geoscience. Available online: http://ds.iris.edu/mda/_OBSIP/ (accessed on 1 October 2023).
- Cai, C.; Wiens, D.A.; Shen, W.; Eimer, M. Water input into the Mariana subduction zone estimated from ocean-bottom seismic data. Nature 2018, 563, 389–392. [Google Scholar] [CrossRef] [PubMed]
- Isse, T.; Kawakatsu, H.; Yoshizawa, K.; Takeo, A.; Shiobara, H.; Sugioka, H.; Ito, A.; Suetsugu, D.; Reymond, D. Surface wave tomography for the Pacific Ocean incorporating seafloor seismic observations and plate thermal evolution. Earth Planet. Sci. Lett. 2019, 510, 116–130. [Google Scholar] [CrossRef]
- Mark, H.F.; Lizarralde, D.; Collins, J.A.; Miller, N.C.; Hirth, G.; Gaherty, J.B.; Evans, R.L. Azimuthal seismic anisotropy of 70 Ma Pacific-plate upper mantle. J. Geophys. Res. Solid Earth 2019, 124, 1889–1909. [Google Scholar] [CrossRef]
- Corela, C.; Loureiro, A.; Duarte, J.L.; Matias, L.; Rebelo, T.; Bartolomeu, T. The effect of deep ocean currents on ocean- bottom seismometers records. Nat. Hazards Earth Syst. Sci. 2023, 23, 1433–1451. [Google Scholar] [CrossRef]
- Zali, Z.; Rein, T.; Krüger, F.; Ohrnberger, M.; Scherbaum, F. Ocean bottom seismometer (OBS) noise reduction from horizontal and vertical components using harmonic–percussive separation algorithms. Solid Earth 2023, 14, 181–195. [Google Scholar] [CrossRef]
- Liu, D.; Yang, T.; Wang, Y.; Wu, Y.; Huang, X. Pankun: A New Generation of Broadband Ocean Bottom Seismograph. Sensors 2023, 23, 4995. [Google Scholar] [CrossRef] [PubMed]
- Nakano, M.; Nakamura, T.; Kamiya, S.-I.; Kaneda, Y. Seismic activity beneath the Nankai trough revealed by DONET ocean-bottom observations. Mar. Geophys. Res. 2014, 35, 271–284. [Google Scholar] [CrossRef]
- Suzuki, K.; Nakano, M.; Takahashi, N.; Hori, T.; Kamiya, S.; Araki, E.; Nakata, R.; Kaneda, Y. Synchronous changes in the seismicity rate and ocean-bottom hydrostatic pressures along the Nankai trough: A possible slow slip event detected by the Dense Oceanfloor Network system for Earthquakes and Tsunamis (DONET). Tectonophysics 2016, 680, 90–98. [Google Scholar] [CrossRef]
- Barnes, C.R.; Best, M.M.R.; Zielinski, A. The NEPTUNE Canada Regional Cabled Ocean Observatory. Sea Technol. 2008, 49, 10–14. [Google Scholar]
- Barnes, C.R.; Best, M.M.R.; Johnson, F.R.; Pirenne, B. Final installation and initial operation of the world’s first regional cabled ocean observatory (NEPTUNE Canada). CMOS Bull. SCMO 2010, 38, 2–9. [Google Scholar]
- Lobkovsky, L.I.; Kuzin, I.P.; Kovachev, S.A.; Krylov, A.A. Seismicity of the Central Kuril Islands before and after the catastrophic M = 8.3 (November 15, 2006) and M = 8.1 (January 13, 2007) earthquakes. Dokl. Earth Sci. 2015, 464, 1101–1105. [Google Scholar] [CrossRef]
- Kuzin, I.P.; Kovachev, S.A.; Lobkovskii, L.I. Seismic microzonation and assessment of earthquake hazard for the construction sites of sea-based facilities in low seismicity water areas. J. Volcanol. Seism. 2009, 3, 131–143. [Google Scholar] [CrossRef]
- Simpson, D.W.; Leith, W. The 1976 and 1984 Gazli, USSR, earthquakes—Were they induced? Bull. Seismol. Soc. Am. 1985, 75, 1465–1468. [Google Scholar]
- Vlek, C. Induced Earthquakes from Long-Term Gas Extraction in Groningen, the Netherlands: Statistical Analysis and Prognosis for Acceptable-Risk Regulation. Risk Anal. 2018, 38, 1455–1473. [Google Scholar] [CrossRef]
- Kovachev, S.A.; Krylov, A.A. Results of Seismological Monitoring in the Baltic Sea and Western Part of the Kaliningrad Oblast Using Bottom Seismographs. Izv. Phys. Solid Earth 2023, 59, 190–208. [Google Scholar] [CrossRef]
- Piskarev, A.L. Arctic Basin: Geology and Morphology; VNIIOkeangeologiya: St. Petersburg, Russia, 2016; 291p. (in Russian) [Google Scholar]
- Krylov, A.A.; Ivashchenko, A.I.; Kovachev, S.A.; Tsukanov, N.V.; Kulikov, M.E.; Medvedev, I.P.; Ilinskiy, D.A.; Shakhova, N.E. The Seismotectonics and Seismicity of the Laptev Sea Region: The Current Situation and a First Experience in a Year-Long Installation of Ocean Bottom Seismometers on the Shelf. J. Volcanol. Seism. 2020, 14, 379–393. [Google Scholar] [CrossRef]
- Krylov, A.A.; Egorov, I.V.; Kovachev, S.A.; Ilinskiy, D.A.; Ganzha, O.Y.; Timashkevich, G.K.; Roginskiy, K.A.; Kulikov, M.E.; Novikov, M.A.; Ivanov, V.N.; et al. Ocean-Bottom Seismographs Based on Broadband MET Sensors: Architecture and Deployment Case Study in the Arctic. Sensors 2021, 21, 3979. [Google Scholar] [CrossRef]
- Krylov, A.A.; Kulikov, M.E.; Kovachev, S.A.; Medvedev, I.P.; Lobkovsky, L.I.; Semiletov, I.P. Peculiarities of the HVSR Method Application to Seismic Records Obtained by Ocean-Bottom Seismographs in the Arctic. Appl. Sci. 2022, 12, 9576. [Google Scholar] [CrossRef]
- Krylov, A.A.; Lobkovsky, L.I.; Rukavishnikova, D.D.; Baranov, B.V.; Kovachev, S.A.; Dozorova, K.A.; Tsukanov, N.V.; Semiletov, I.P. New Data on Seismotectonics of the Laptev Sea from Observations by Ocean Bottom Seismographs. Dokl. Earth Sci. 2022, 507, 936–940. [Google Scholar] [CrossRef]
- Krylov, A.A.; Ananiev, R.A.; Chernykh, D.V.; Alekseev, D.A.; Balikhin, E.I.; Dmitrevsky, N.N.; Novikov, M.A.; Radiuk, E.A.; Domaniuk, A.V.; Kovachev, S.A.; et al. A Complex of Marine Geophysical Methods for Studying Gas Emission Process on the Arctic Shelf. Sensors 2023, 23, 3872. [Google Scholar] [CrossRef]
- Webb, S.C. Broadband seismology and noise under the ocean. Rev. Geophys. 1998, 36, 105–142. [Google Scholar] [CrossRef]
- Janiszewski, H.A.; Eilon, Z.; Russell, J.B.; Brunsvik, B.; Gaherty, J.B.; Mosher, S.G.; Hawley, W.B.; Coats, S. Broad-band ocean bottom seismometer noise properties. Geophys. J. Int. 2023, 233, 297–315. [Google Scholar] [CrossRef]
- Schlindwein, V.; Müller, C.; Jokat, W. Seismoacoustic evidence for volcanic activity on the ultraslow spreading Gakkel Ridge, Arctic Ocean. Geophys. Res. Lett. 2005, 32, L18306. [Google Scholar] [CrossRef]
- Schlindwein, V.; Müller, C.; Jokat, W. Microseismicity of the ultraslow spreading Gakkel ridge, Arctic Ocean: A pilot study. Geophys. J. Int. 2007, 169, 100–112. [Google Scholar] [CrossRef]
- Schlindwein, V.; Schmid, F. Mid-ocean-ridge seismicity reveals extreme types of ocean lithosphere. Nature 2016, 535, 276–279. [Google Scholar] [CrossRef]
- Schlindwein, V.; Riedel, C. Location and source mechanism of sound signals at Gakkel ridge, Arctic Ocean: Submarine Strombolian activity in the 1999–2001 volcanic episode. Geochem. Geophys. Geosyst. 2010, 10, Q01002. [Google Scholar] [CrossRef]
- Koulakov, I.; Schlindwein, V.; Liu, M.; Gerya, T.; Jakovlev, A.; Ivanov, A. Low-degree mantle melting controls the deep seismicity and explosive volcanism of the Gakkel Ridge. Nat. Commun. 2022, 13, 3122. [Google Scholar] [CrossRef] [PubMed]
- R-Sensors. Seismic Instruments for Science and Engineering. Available online: https://r-sensors.ru/en/ (accessed on 1 October 2023).
- Logys. Available online: https://logsys.ru/ (accessed on 1 October 2023).
- Shakhova, N.; Semiletov, I.; Sergienko, V.; Lobkovsky, L.; Yusupov, V.; Salyuk, A.; Salomatin, A.; Chernykh, D.; Kosmach, D.; Panteleev, G.; et al. The East Siberian Arctic Shelf: Towards further assessment of permafrost-related methane fluxes and role of sea ice. Philos. Trans. R. Soc. A 2015, 373, 20140451. [Google Scholar] [CrossRef]
- Shakhova, N.; Semiletov, I.; Gustafsson, Ö.; Sergienko, V.; Lobkovsky, L.; Dudarev, O.; Tumskoy, V.; Grigoriev, M.; Mazurov, A.; Salyuk, A.; et al. Current rates and mechanisms of subsea permafrost degradation in the East Siberian Arctic Shelf. Nat. Commun. 2017, 8, 15872. [Google Scholar] [CrossRef]
- Shakhova, N.; Semiletov, I.; Chuvilin, E. Understanding the Permafrost–Hydrate System and Associated Methane Releases in the East Siberian Arctic Shelf. Geosciences 2019, 9, 251. [Google Scholar] [CrossRef]
- Kennett, B.L.N. Seismological Tables: ak135; Research School of Earth Sciences, The Australian National University: Canberra, Australia, 2005; 289p. [Google Scholar]
- Overduin, P.P.; Haberland, C.; Ryberg, T.; Kneier, F.; Jacobi, T.; Grigoriev, M.N.; Ohrnberger, M. Submarine permafrost depth from ambient seismic noise. Geophys. Res. Lett. 2015, 42, 7581–7588. [Google Scholar] [CrossRef]
- International Seismological Centre. Available online: http://www.isc.ac.uk/iscbulletin/search/ (accessed on 1 October 2023).
- U.S. Geological Survey. Available online: https://earthquake.usgs.gov/earthquakes/search/ (accessed on 1 October 2023).
- “Earthquakes of Russia” Database. Geophysical Survey of the Russian Academy of Sciences. Available online: http://eqru.gsras.ru/ (accessed on 1 October 2023).
- Chava, A.; Gebruk, A.; Kolbasova, G.; Krylov, A.; Tanurkov, A.; Gorbuskin, A.; Konovalova, O.; Migali, D.; Ermilova, E.; Shabalin, N.; et al. At the Interface of Marine Disciplines: Use of Autonomous Seafloor Equipment for Studies of Biofouling Below the Shallow-Water Zone. Oceanography 2021, 34, 61–70. [Google Scholar] [CrossRef]
- Ananyev, R.; Dmitrevskiy, N.; Jakobsson, M.; Lobkovsky, L.; Nikiforov, S.; Roslyakov, A.; Semiletov, I. Sea-ice ploughmarks in the eastern Laptev Sea, East Siberian Arctic shelf. Geol. Soc. Lond. Mem. 2016, 46, 301–302. [Google Scholar] [CrossRef]
- Nikiforov, S.L.; Ananiev, R.A.; Libina, N.V.; Dmitrevskiy, N.N.; Lobkovskii, L.I. Ice Gouging on Russia’s Arctic Shelf. Oceanology 2019, 59, 422–424. [Google Scholar] [CrossRef]
- Guidelines for the Implementation of the H/V Spectral Ration Technique on Ambient Vibrations Measurements, Processing and Interpretation; SESAME European research project WP12—Deliverable D23.12, European Commission—Research General Directorate Project No. EVG1-CT-2000-00026 SESAME; European Comission: Geneva, Switzerland, 2004; 62p.
- Kuznetsov, M.Y.; Shevtsov, V.I.; Poljanichko, V.I. Inderwater noise characteristics of TINRO-Center’s reseach vessels. Izv. TINRO 2014, 177, 235–256. (In Russian) [Google Scholar]
- Pisarev, S.V. Modern drifting robotic devices for contact measurements of the physical characteristics of the Arctic basin. Oceanol. Res. 2019, 47, 5–31. (In Russian) [Google Scholar] [CrossRef]
- OSI SAF Global Sea Ice Concentration Climate Data Record v2.0—Multimission, EUMETSAT SAF on Ocean and Sea Ice, 2017. Available online: https://navigator.eumetsat.int/product/EO:EUM:DAT:MULT:OSI-450 (accessed on 1 October 2023).
- Peterson, J. Observation and Modeling of Seismic Background Noise; U.S. Geological Survey Open-File Report; US Geological Survey: Reston, VA, USA, 1993; pp. 93–322. [Google Scholar]
- Wolin, E.; McNamara, D.E. Establishing High-Frequency Noise Baselines to 100 Hz Based on Millions of Power Spectra from IRIS MUSTANG. Bull. Seism. Soc. Am. 2020, 110, 270–278. [Google Scholar] [CrossRef]
- Longuet-Higgins, M.S. A theory for the generation of microseisms. Philos. Trans. R. Soc. A 1950, 243, 1–35. [Google Scholar]
- Lepore, S.; Grad, M. Analysis of the primary and secondary microseisms in the wavefield of the ambient noise recorded in northern Poland. Acta Geophys. 2018, 66, 915–929. [Google Scholar] [CrossRef]
- Hersbach, H.; de Rosnay, P.; Bell, B.; Schepers, D.; Simmons, A.J.; Soci, C.; Abdalla, S.; Balmaseda, M.A.; Balsamo, G.; Bechtold, P.; et al. Operational Global Reanalysis: Progress, Future Directions and Synergies with NWP; ERA Report Series no. 27; European Centre for Medium Range Weather Forecasts: Reading, UK, 2018. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | MPSSR | Typhoon | GNS | GNS-C | OBS for Installation through Ice Holes | Seismograph for Installation on Ice |
|---|---|---|---|---|---|---|
| Developer | IO RAS | IO RAS | IP Ilinsky D.A. | IO RAS/IP Ilinsky D.A. | IO RAS | IO RAS |
| Dimensions | 44 cm (diam.) | 37 cm (diam.) | 33 cm (diam.) | 43 cm (diam.) | 21 × 21 × 68 cm | 276 cm (diam.) 75 cm (height) |
| Maximum depth (housing) | 3000 m | 2000 m | 6000 m | 6000 m | 30 m | – |
| Sensors | Three-component seismometer CME-4311, three-component geophone SH/SV-10, hydrophone 5007 m | Three-component seismometer CME-3311, hydrophone 5007 m | Three-component seismometer SM-6, hydrophone HTI-94-SSQ | Three-component seismometer CME-4111/4311, hydrophone EDBOE RAS | Three-component seismometer CME-3311 | Three-component seismometer SPV-3K, hydrophone 5007 m |
| Number of channels | 7 | 4 | 4 | 4 | 3 | 4/8 |
| Frequency band | 0.0167–50 Hz (CME-4311), 10–250 Hz (SH/SV-10), 0.04–2500 Hz (5007 m) | 1–50 Hz (CME-3311), 0.04–2500 Hz (5007 m) | 4.5–140 Hz (SM-6), 2–30,000 Hz (HTI-94-SSQ) | 0.0083–50 Hz (CME-4111), 0.067–30,000 Hz (EDBOE RAS) | 1–50 Hz (CME-3311) | 0.5–65 Hz (SPV-3K), 0.04–2500 Hz (5007 m) |
| Sensitivity | 2000 V/m/s (CME-4311), 28 V/m/s (SH/SV-10), 7.2 ± 0.5 mV/Pa (5007 m) | 2000 V/m/s (CME-3311), 7.2 ± 0.5 mV/Pa (5007 m) | 28.8 V/m/s (SM-6), 12.6 V/Bar (HTI-94-SSQ without preamp) | 4000 V/m/s (CME-4111/4311), 200 V/bar (EDBOE RAS) | 2000 V/m/s (CME-3311) | 500 V/m/s (SPV-3K) |
| Dynamic range | 122 dB (CME-4311), 100 dB (5007 m) | 118 dB (CME-3311), 100 dB (5007 m) | 140 dB (SM-6), 198 dB (HTI-94-SSQ without preamp) | 122 dB (CME-4111), 120 dB (EDBOE RAS) | 118 dB (CME-3311) | 120 dB (SPV-3K), 100 dB (5007 m) |
| Sample rates, Hz | 20, 25, 40, 50, 80, 100, 160, 200, 400, 800 | 20, 25, 40, 50, 80, 100, 160, 200, 400, 800 | 62.5, 125, 250, 500, 1000, 2000, 4000 | 62.5, 125, 250, 500, 1000, 2000, 4000 | 20, 25, 40, 50, 80, 100, 160, 200, 400, 800 | 31.25, 62.5, 125, 250, 500, 1000 |
| Time synchronization | GPS | GPS | GPS GLONASS | GPS GLONASS | GPS | GPS |
| Temperature stability of the quartz generator | ±5 × 10−9 | ±5 × 10−9 | ±5 × 10−9 | ±5 × 10−9 | ±5 × 10−9 | 10−7 (basic) 10−8 (optional) |
| Memory | SD card up to 64 Gb | SD card up to 64 Gb | SD card up to 128 Gb | SD card up to 128 Gb | SD card up to 64 Gb | SD card, 32 Gb |
| Allowed installation tilt angle | ±15° | ±15° | ±20° | ±15° | ±15° | ±15° |
| Temperature range (sensors) | −12...+55 °C (basic), −40...+55 °C (optional) | −12...+55 °C (basic), −40...+55 °C (optional) | −40...+100 °C | −12...+55 °C (basic), −40...+55 °C (optional) | −12...+55 °C (basic), −40...+55 °C (optional) | −30…+55 °C |
| Type | Latitude, ° N | Longitude, ° E | Depth, m | Water Area | Operation Period |
|---|---|---|---|---|---|
| Long-term deployments | |||||
| MPSSR | 75.42 | 127.39 | 42 | Laptev Sea | October 2018–February 2019 |
| MPSSR | 75.43 | 129.13 | 40 | Laptev Sea | October 2018–March 2019 |
| GNS-C | 77.31 | 120.61 | 350 | Laptev Sea | October 2018–May 2019 |
| MPSSR | 69.67 | 55.18 | 39 | Barents Sea | Aug 2018–November 2019 |
| MPSSR | 69.40 | 55.26 | 29 | Barents Sea | Aug 2018–November 2019 |
| MPSSR | 69.48 | 56.01 | 29 | Barents Sea | Aug 2018–November 2019 |
| MPSSR | 69.75 | 55.93 | 44 | Barents Sea | Aug 2018–November 2019 |
| MPSSR | 76.39 | 125.66 | 51 | Laptev Sea | October 2019–January 2020 |
| Typhoon | 76.83 | 127.69 | 61 | Laptev Sea | October 2019–February 2020 |
| Typhoon | 71.54 | 66.47 | 46 | Kara Sea | October 2021–January 2022 |
| Typhoon | 71.24 | 65.60 | 42 | Kara Sea | October 2021–March 2022 |
| Typhoon | 69.97 | 65.30 | 41 | Kara Sea | October 2021–February 2022 |
| MPSSR | 74.90 | 69.72 | 42 | Kara Sea | October 2021–March 2022 |
| Short-term deployments | |||||
| GNS-C | 75.42 | 129.13 | 40 | Laptev Sea | 30 September 2018–6 October 2018 |
| GNS-C | 76.86 | 125.57 | 75 | Laptev Sea | 28 September 2018–13 October 2018 |
| MPSSR | 75.01 | 126.52 | 37 | Laptev Sea | 6 October 2018–9 October 2018 |
| MPSSR | 75.01 | 128.26 | 36 | Laptev Sea | 5 October 2018–12 October 2018 |
| MPSSR | 75.20 | 127.40 | 40 | Laptev Sea | 6 October 2018–8 October 2018 |
| MPSSR | 74.94 | 160.52 | 45 | East Siberian Sea | 30 September 2019–3 October 2019 |
| Typhoon | 72.98 | 65.87 | 82 | Kara Sea | 4 November 2022 (~1 h) |
| Typhoon | 69.13 | 58.42 | 17 | Barents Sea | 10 November 2022 (~1 h) |
| Typhoon | 69.20 | 58.03 | 21 | Barents Sea | 10 November 2022 (~1 h) |
| Typhoon | 69.22 | 57.81 | 22 | Barents Sea | 11 November 2022 (~1 h) |
| Typhoon | 69.32 | 57.82 | 22 | Barents Sea | 11 November 2022 (~1 h) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krylov, A.A.; Novikov, M.A.; Kovachev, S.A.; Roginskiy, K.A.; Ilinsky, D.A.; Ganzha, O.Y.; Ivanov, V.N.; Timashkevich, G.K.; Samylina, O.S.; Lobkovsky, L.I.; et al. Features of Seismological Observations in the Arctic Seas. J. Mar. Sci. Eng. 2023, 11, 2221. https://doi.org/10.3390/jmse11122221
Krylov AA, Novikov MA, Kovachev SA, Roginskiy KA, Ilinsky DA, Ganzha OY, Ivanov VN, Timashkevich GK, Samylina OS, Lobkovsky LI, et al. Features of Seismological Observations in the Arctic Seas. Journal of Marine Science and Engineering. 2023; 11(12):2221. https://doi.org/10.3390/jmse11122221
Chicago/Turabian StyleKrylov, Artem A., Mikhail A. Novikov, Sergey A. Kovachev, Konstantin A. Roginskiy, Dmitry A. Ilinsky, Oleg Yu. Ganzha, Vladimir N. Ivanov, Georgy K. Timashkevich, Olga S. Samylina, Leopold I. Lobkovsky, and et al. 2023. "Features of Seismological Observations in the Arctic Seas" Journal of Marine Science and Engineering 11, no. 12: 2221. https://doi.org/10.3390/jmse11122221