
Unified System Analysis for Time-Variant Reliability of a Floating Offshore Substation

 ,
,  and
and
Abstract
:1. Introduction
- Offshore wind turbine installed: the substations are fixed on the seabed. The difficulties are mainly in minimizing their footprint and comprehending the environmental impact on equipment.
- Offshore oil and gas in deep water (i.e., deeper than 1000 m) uses a floating production structure and flexible bottom-surface links. The R&D work carried out over the last 25 years in this area makes it possible to obtain results, calculation tools, and standards that are regularly updated. Unfortunately, they are specific to floating structures of very large dimensions (weak movements) and are little sensitive to swell and bio-fouling. Despite an important experience, offshore Oil and Gas continues R&D work continuously to optimize sizing methods, standards, and therefore safety factors.
2. Material and Methods: Reliability Methods for Electro-Technical and Mechanical Components
2.1. Definitions and Computation of a Failure Rate of Electro-Technical Components
2.2. Definitions and Computation of a Failure Rate from Probability of Failure of a Mechanical Component
2.3. Annual Failure Probability and Failure Rate
2.4. Unified Time-Dependent Reliability Computation
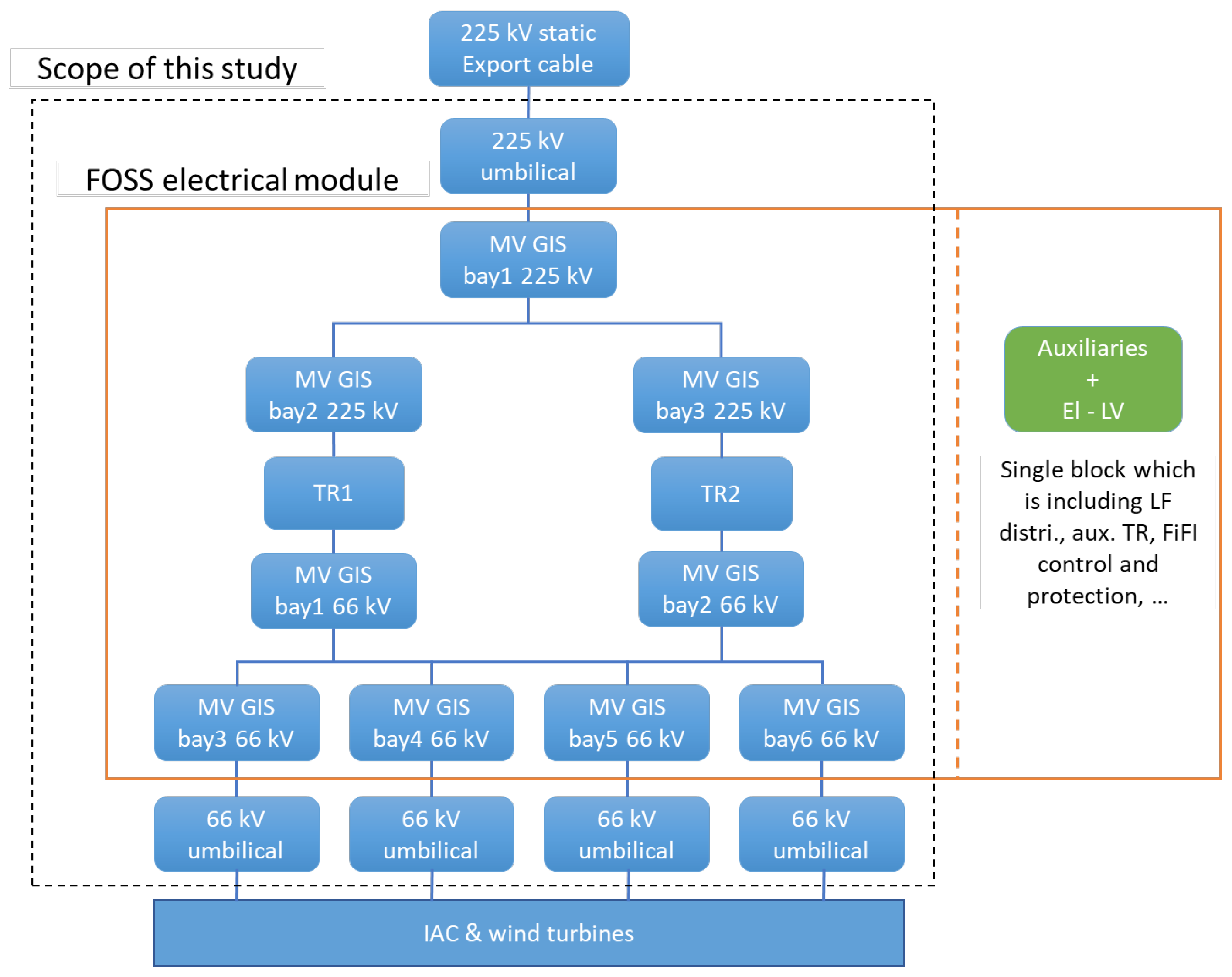
2.5. Main Blocks of a FOSS
2.6. Values of Component Failure Rates Considered for the Electro-Technical Components
3. Results
3.1. Values of Component Failure Rates Considered for the Mechanical Components
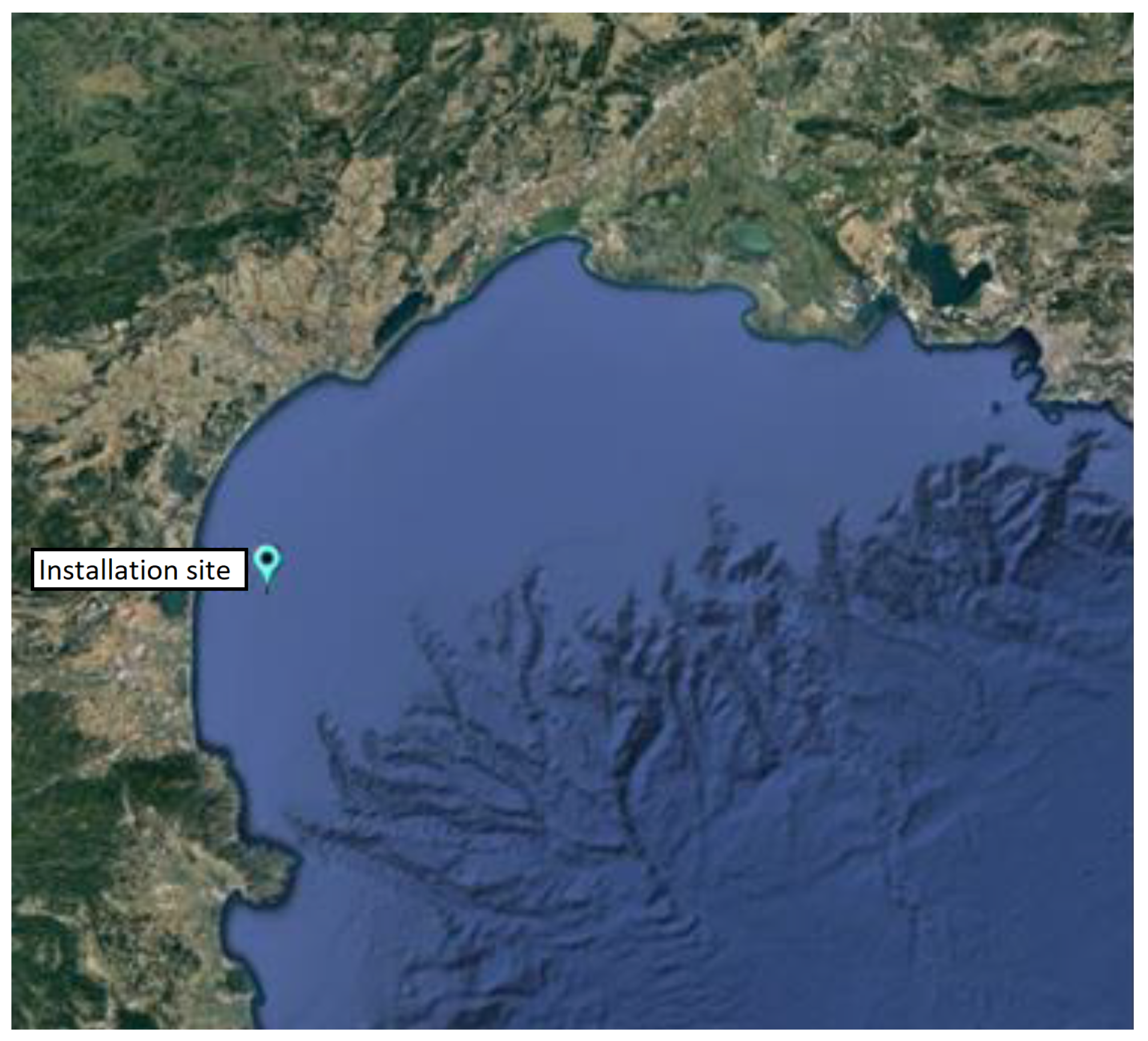
3.2. Installation Site
4. Discussion
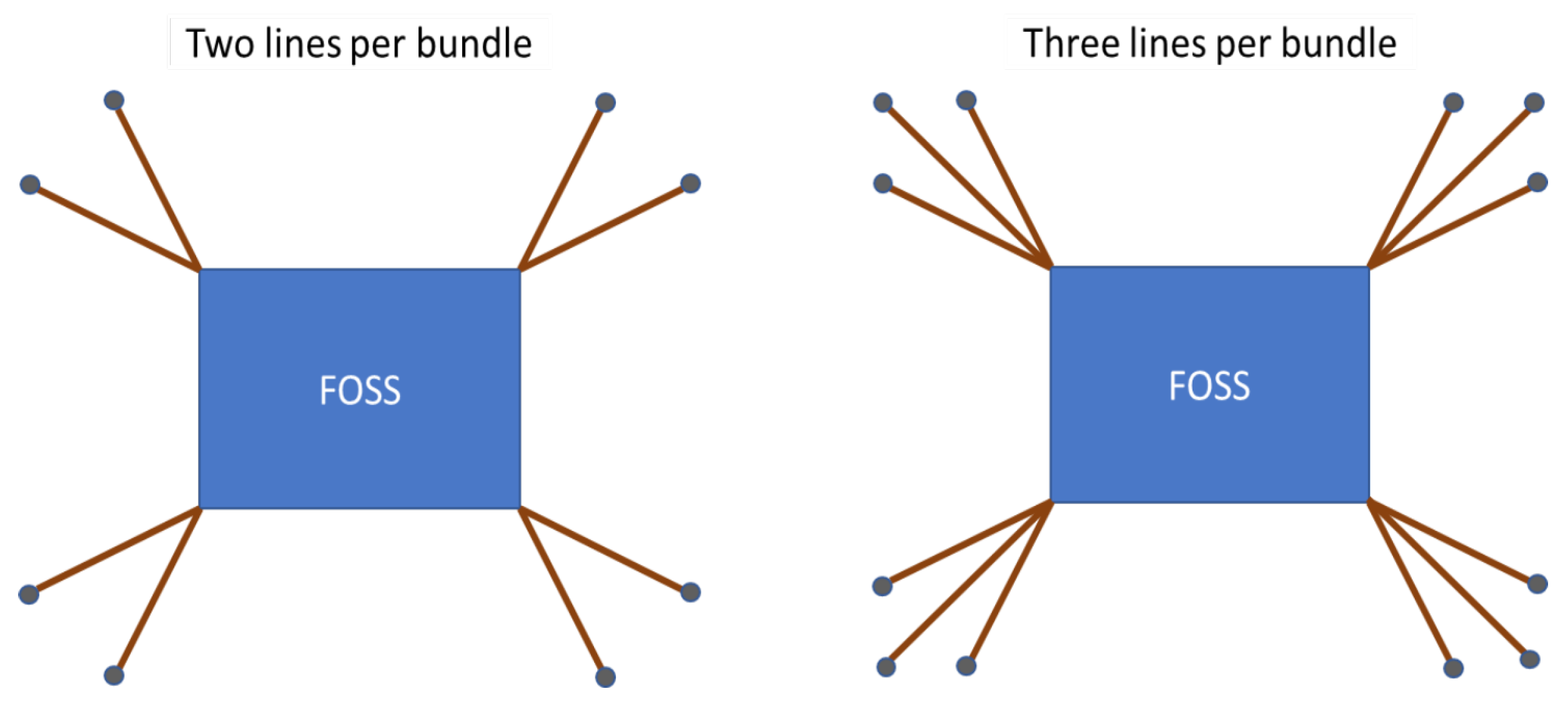
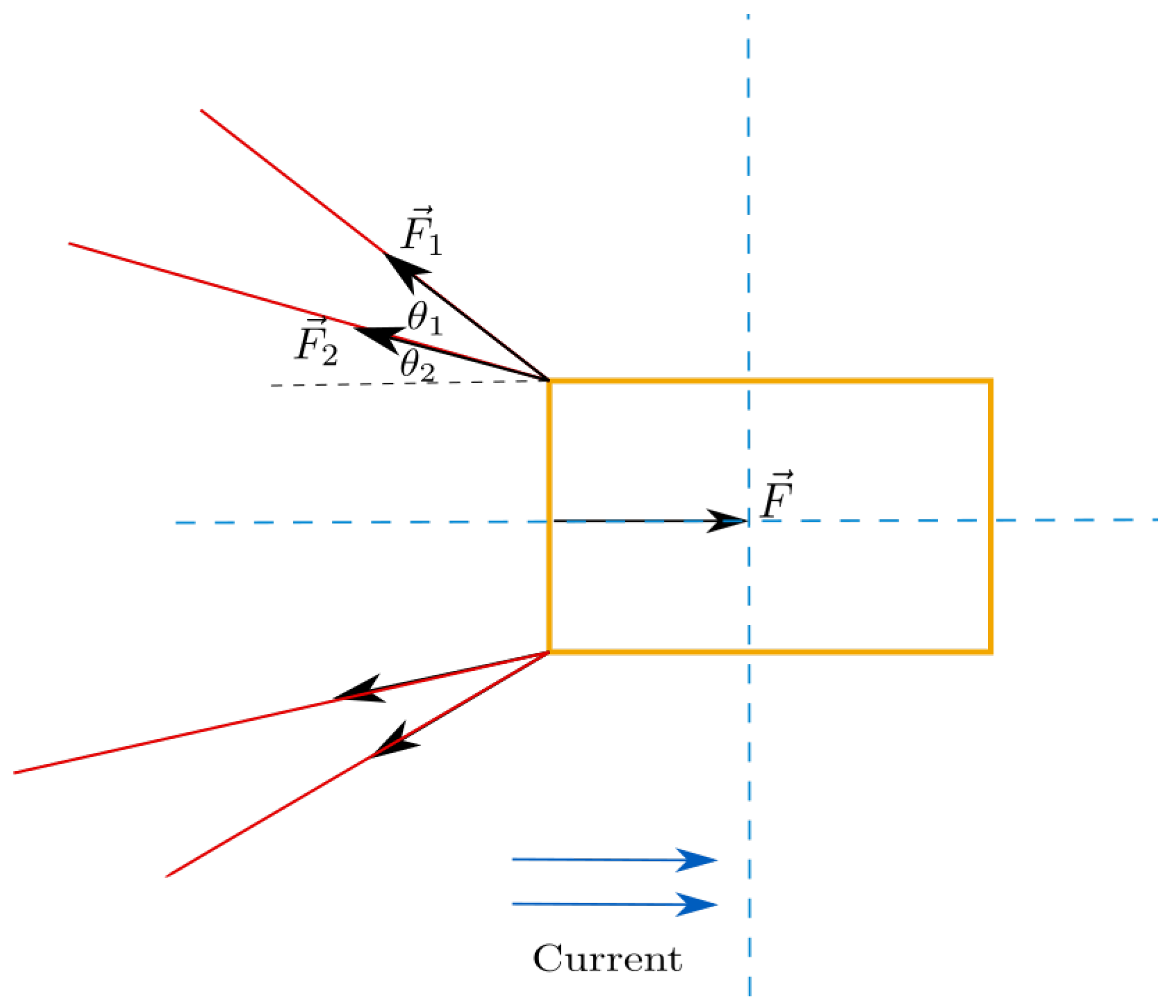
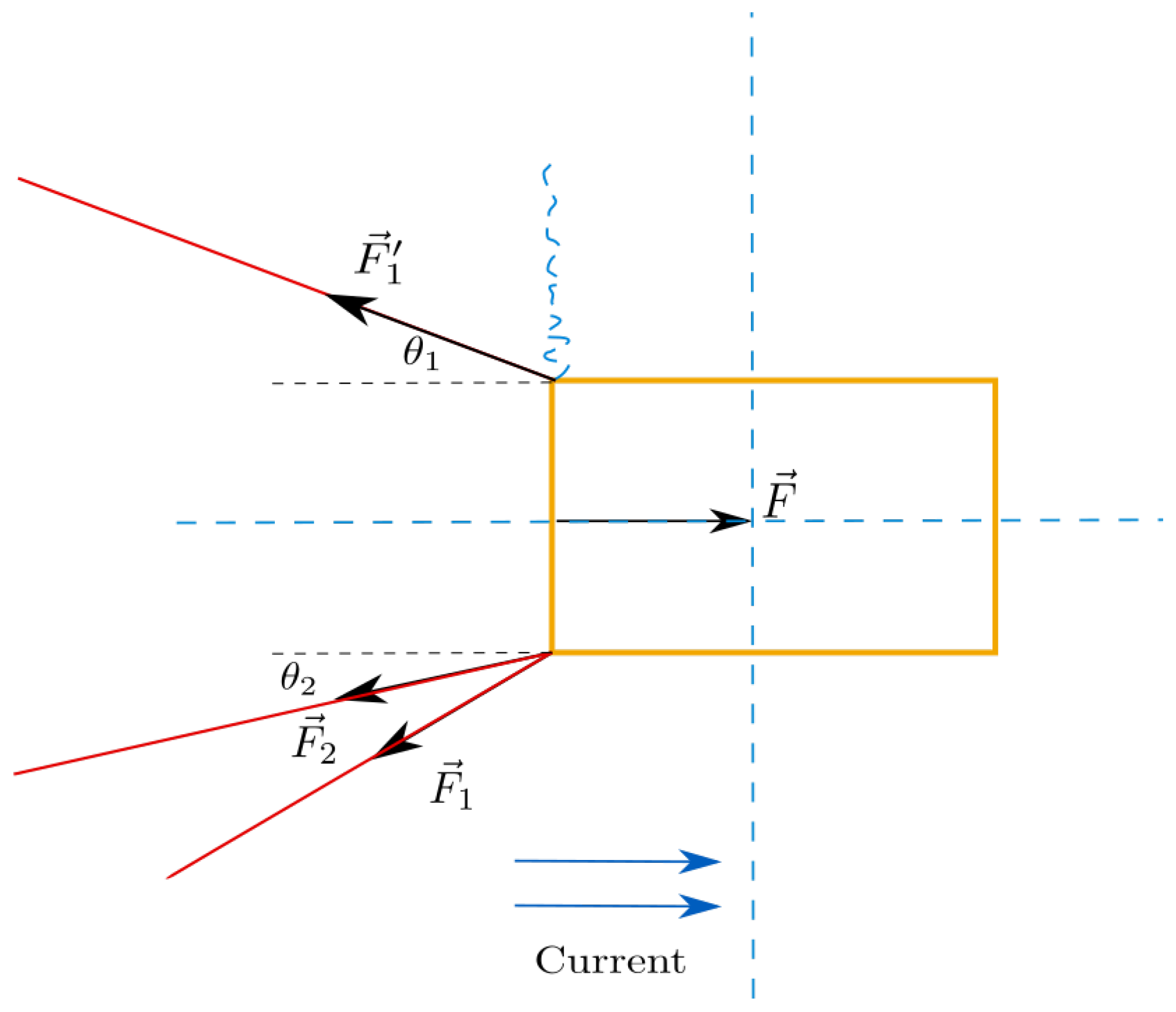
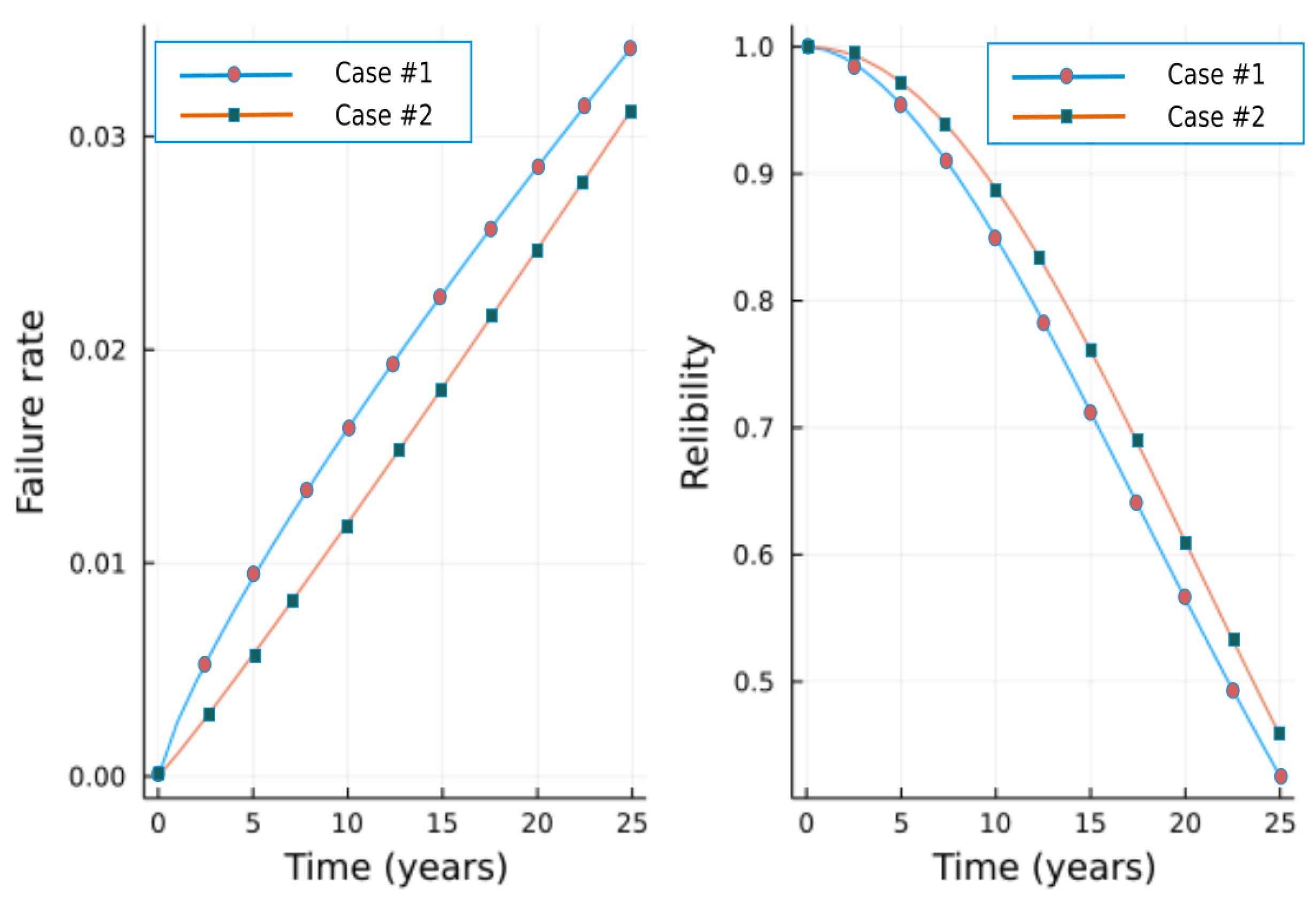
4.1. Mooring System Time-Variant Reliability Computation
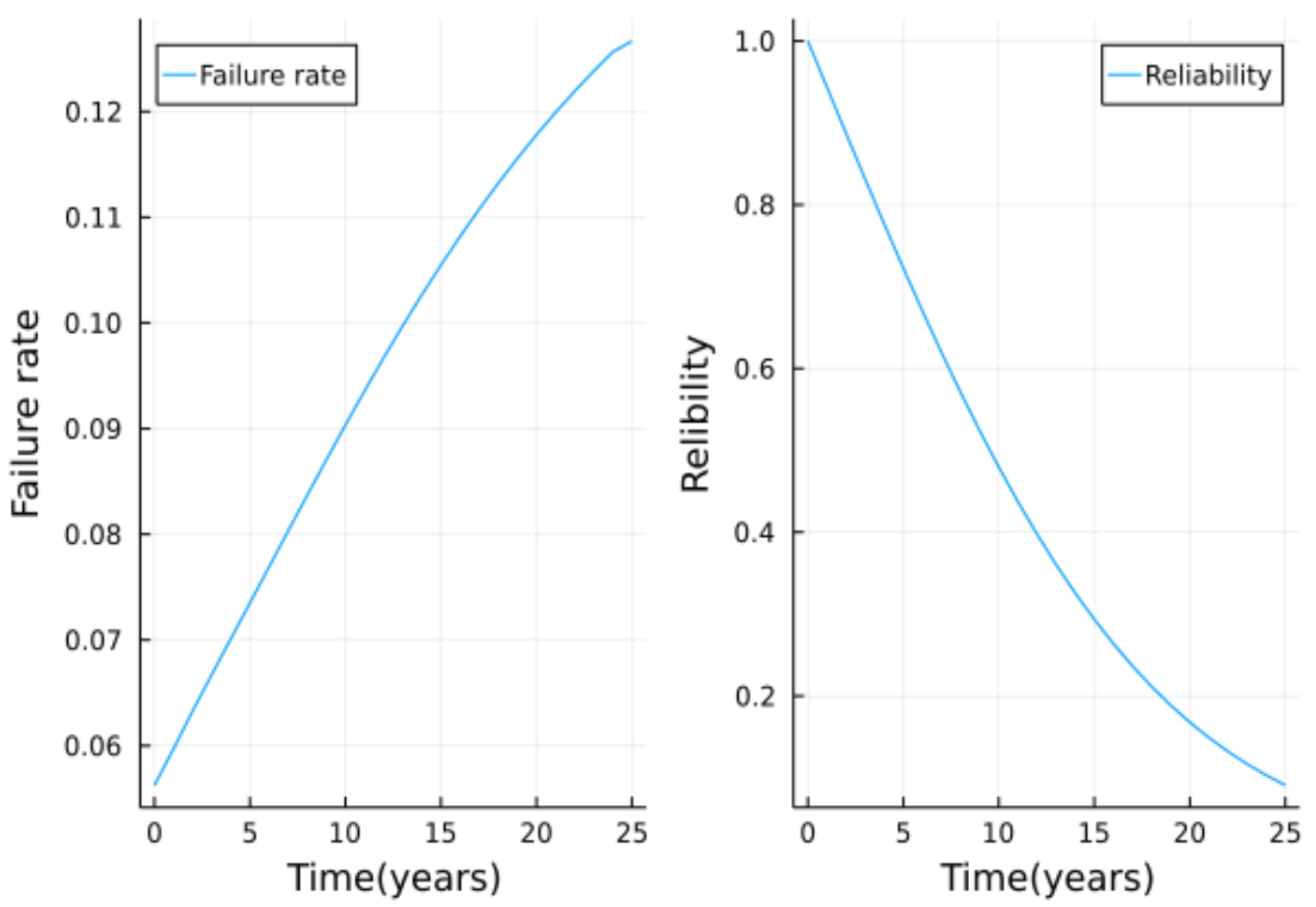
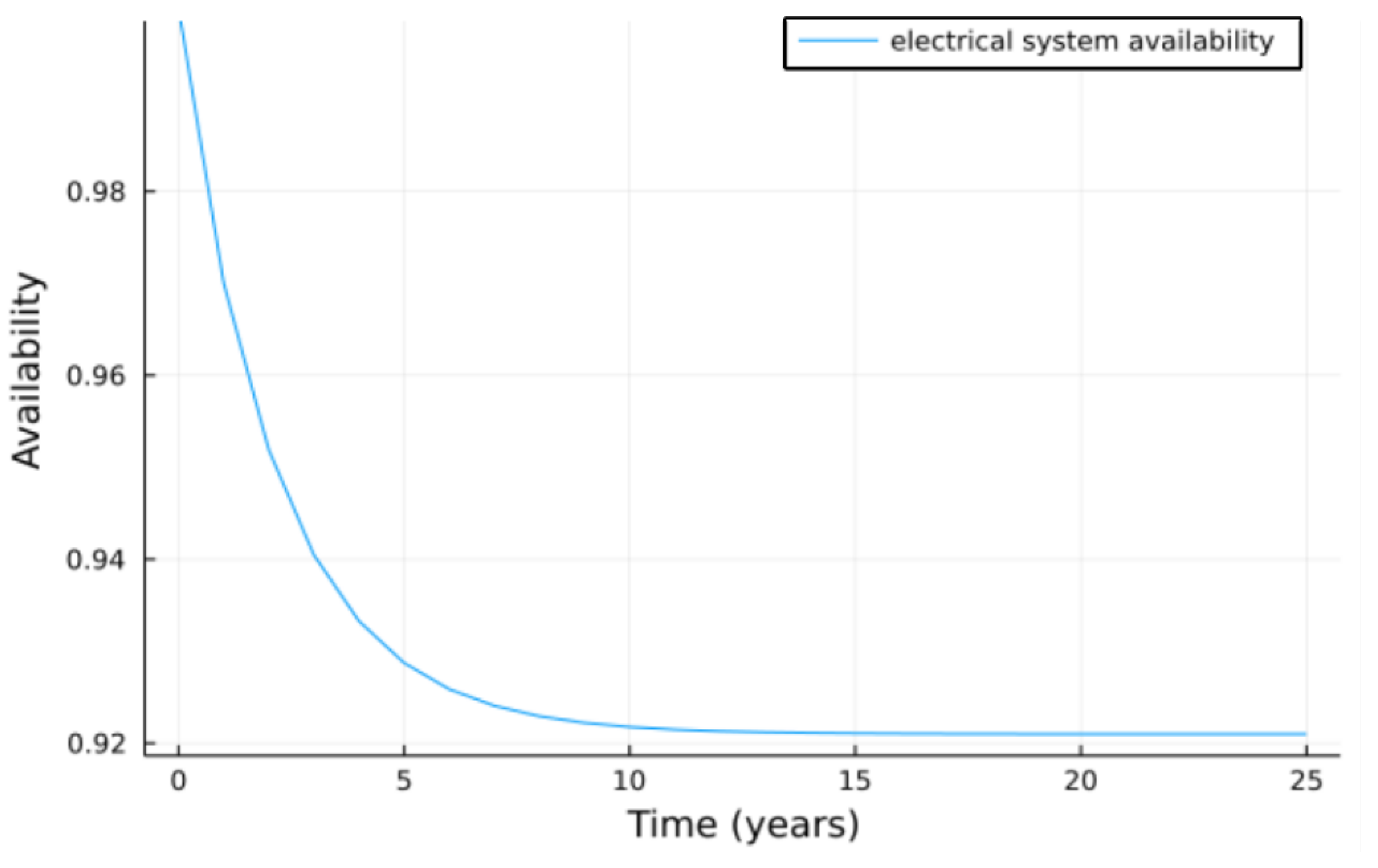
4.2. Electrical System Time-Variant Reliability Computation
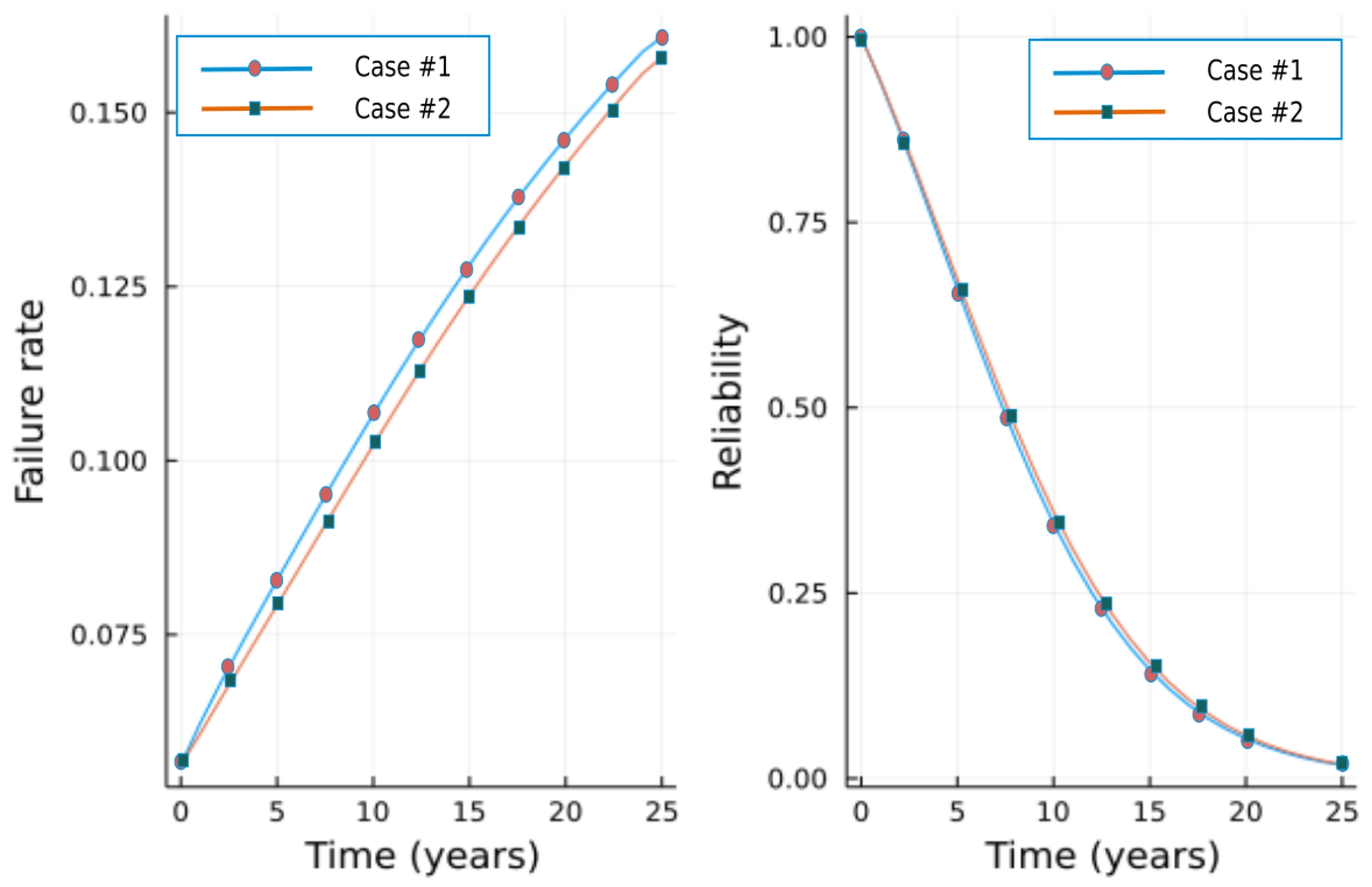
4.3. FOSS Electro-Mechanical Time-Variant Reliability Computation
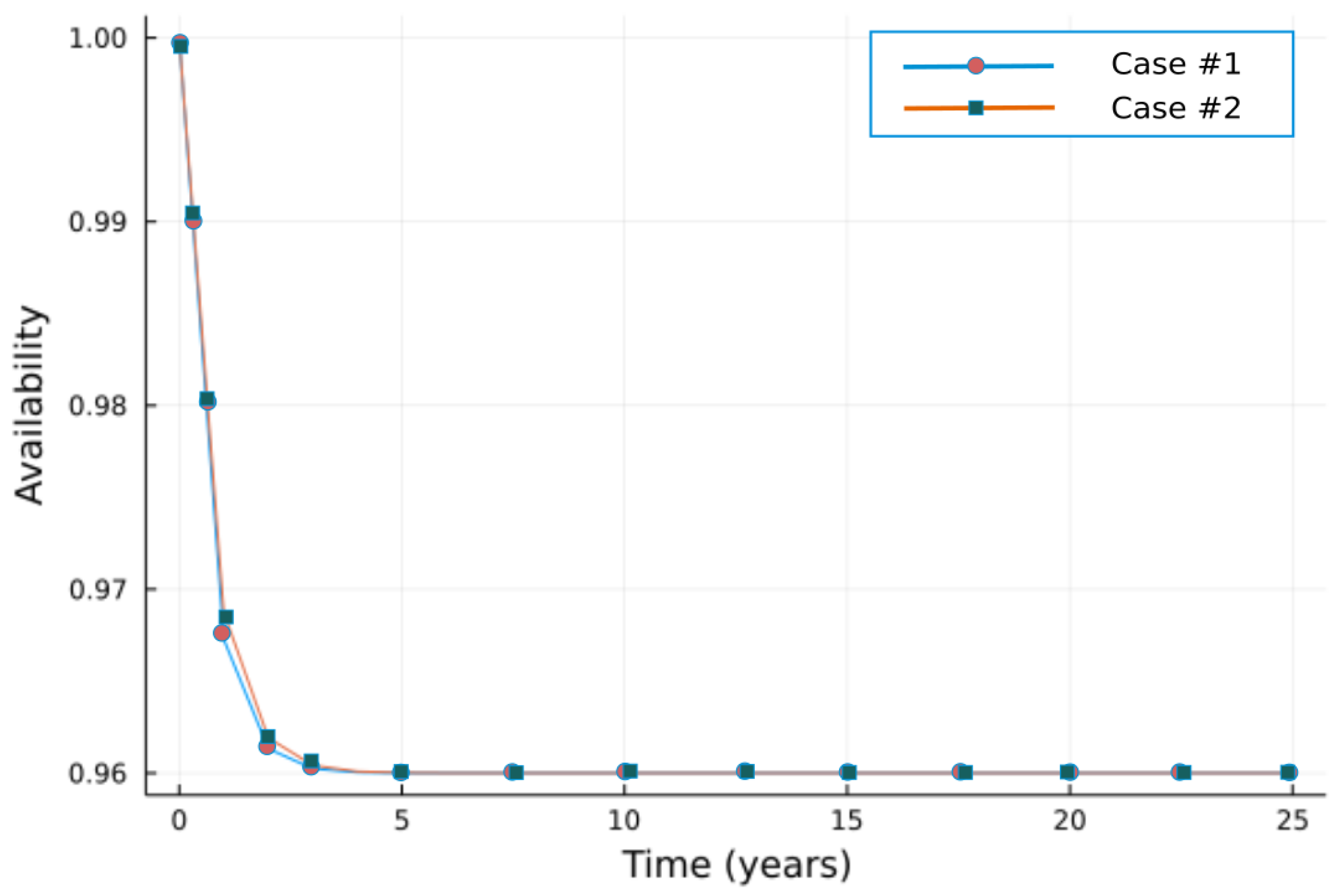
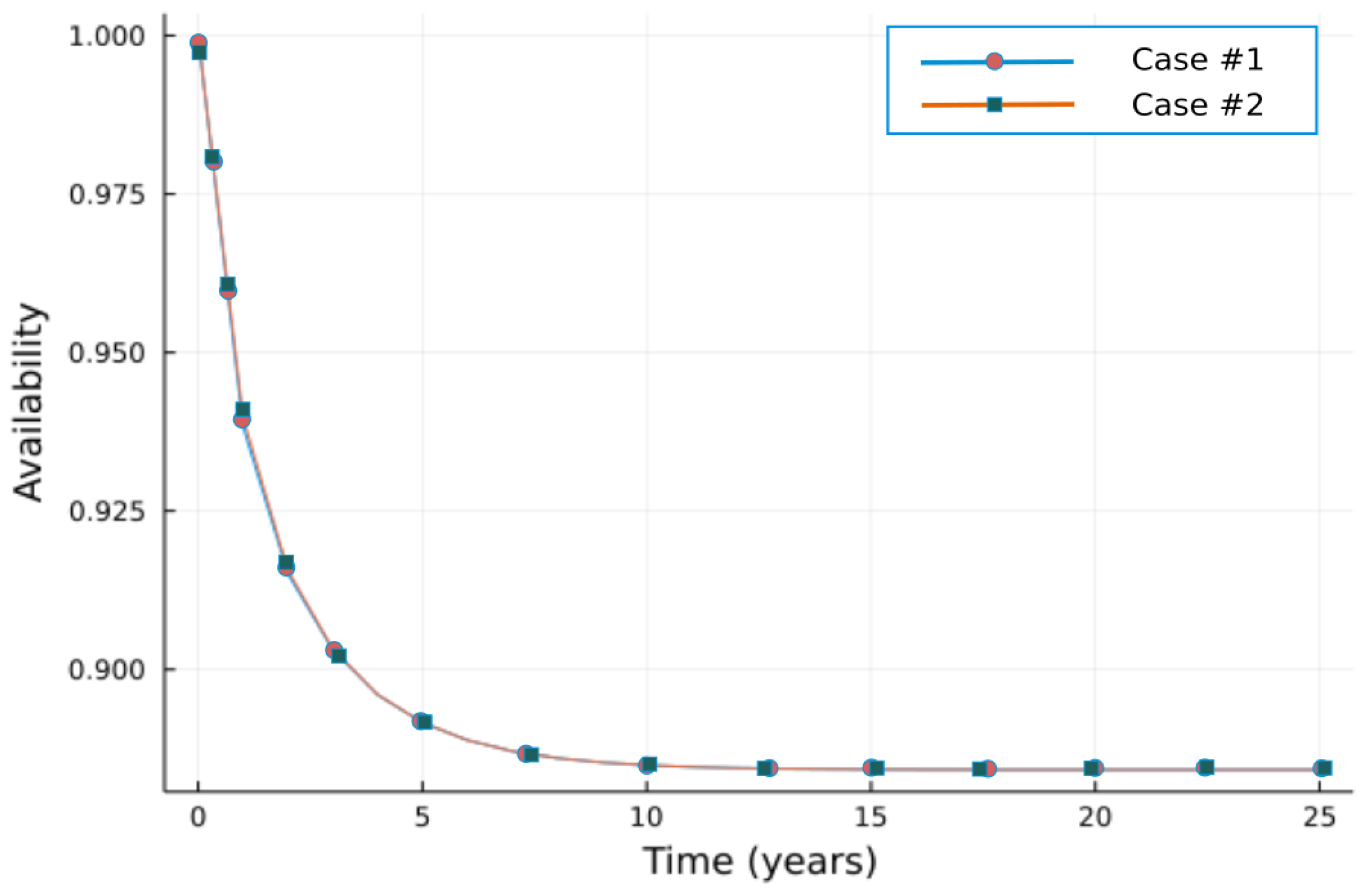
4.4. FOSS Availability Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- IEA Paris. World Energy Outlook; Technical report; IEA: Paris, France, 2019. [Google Scholar]
- IRENA. Future of Wind: Deployment, Investment, Technology, Grid Integration and Socio-Economic Aspects; Technical report; International Renewable Energy Agency: Abu Dhabi, United Arab Emirates, 2019. [Google Scholar]
- Firestone, J.; Bates, A.W.; Prefer, A. Power transmission: Where the offshore wind energy comes home. Environ. Innov. Soc. Transitions 2018, 29, 90–99. [Google Scholar] [CrossRef]
- James, R.; Weng, W.; Spradbery, C.; Jones, J.; Matha, D.; Mitzlaff, A.; Ahilan, R.; Frampton, M.; Lopes, M. Floating Wind Joint Industry Project—Phase I Summary Report. Technical report, Carbon Trust report. 2018. [Google Scholar]
- Oh, K.Y.; Nam, W.; Ryu, M.S.; Kim, J.Y.; Epureanu, B.I. A review of foundations of offshore wind energy convertors: Current status and future perspectives. Renew. Sustain. Energy Rev. 2018, 88, 16–36. [Google Scholar] [CrossRef]
- Fukushima Offshore Wind Consortium. Fukushima Floating Offshore Wind Farm Demonstration Project (Fukushima FORWARD); Technical report, Fukushima FORWARD; The University of Tokyo: Tokyo, Japan, 2014. [Google Scholar]
- Melchers, R.E.; Beck, A.T. (Eds.) Structural Reliability Assessment. In Structural Reliability Analysis and Prediction; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2017. [Google Scholar] [CrossRef]
- Availability and Maintainability in Engineering Design. In Handbook of Reliability, Availability, Maintainability and Safety in Engineering Design; Springer: London, UK, 2009; pp. 295–527. [CrossRef]
- Ahmadivala, M.; Mattrand, C.; Gayton, N.; Orcesi, A.; Yalamas, T. AK-SYS-t: New Time-Dependent Reliability Method Based on Kriging Metamodeling. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part A Civ. Eng. 2021, 7, 04021038. [Google Scholar] [CrossRef]
- Amari, S.; Akers, J. Reliability analysis of large fault trees using the Vesely failure rate. In Proceedings of the Computer Science, Engineering Annual Symposium Reliability and Maintainability, 2004—RAMS, Los Angeles, CA, USA, 26–29 January 2004. [Google Scholar]
- Rice, S. Mathematical Analysis of Random Noise; Bell Telephone System, Technical publications; Monograph; American Telephone and Telegraph Company: Dallas, TX, USA, 1944. [Google Scholar]
- Pham, H.D.; Schoefs, F.; Cartraud, P.; Soulard, T.; Pham, H.H.; Berhault, C. Methodology for modeling and service life monitoring of mooring lines of floating wind turbines. Ocean Eng. 2019, 193, 106603. [Google Scholar] [CrossRef]
- Ma, K.T.; Shu, H.; Smedley, P.; L’Hostis, D.; Duggal, A. A Historical Review on Integrity Issues of Permanent Mooring Systems. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 6–9 May 2013. [Google Scholar] [CrossRef]
- Zhao, G.; Zhao, Y.; Dong, S. System reliability analysis of mooring system for floating offshore wind turbine based on environmental contour approach. Ocean Eng. 2023, 285, 115157. [Google Scholar] [CrossRef]
- Li, H.; Peng, W.; Huang, C.G.; Guedes Soares, C. Failure Rate Assessment for Onshore and Floating Offshore Wind Turbines. J. Mar. Sci. Eng. 2022, 10, 1965. [Google Scholar] [CrossRef]
- Wang, Y.; Zou, C.; Ding, F.; Dou, X.; Ma, Y.; Liu, Y. Structural Reliability Based Dynamic Positioning of Turret-Moored FPSOs in Extreme Seas. Math. Probl. Eng. 2014, 2014, 302481. [Google Scholar] [CrossRef]
- Magazine, R.E. IFPEN and Principia release DeepLines Wind FEA software. 2015. [Google Scholar]
- DNV. Recommended Practice DNV-RP-C205: Environmental Conditions and Environmental Loads; Technical report; Det Norske Veritas: Bellum, Norway, 2010. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | MTTF (Years) | MTTR (Days) | Failure Rate |
|---|---|---|---|
| GIS 66 | 50 | 21 | 0.002 |
| GIS 225 | 50 | 21 | 0.002 |
| Transformer | 200 | 60 | 0.005 |
| Umb 66 | 15–40 | - | 0.025–0.067 |
| Umb 225 | 15–40 | - | 0.025–0.067 |
| Case | Substation | Mooring System | Design Tension (MPM) (Tons) | Condition |
|---|---|---|---|---|
| #1 | SeeOS1XL 250 MW (2TR185/132MVA) | 8 lines, chain, 100 mm RS4 Mooring radius: 900 m | 497.3 772.8 | Intact Damaged |
| #2 | SeeOS1XL 250 MW (2TR185/132MVA) | 12 lines, chain, 100 mm RS4 Mooring radius: 900 m | 316.3 419.2 | Intact Damaged |
| Cases | #1 | #2 |
|---|---|---|
| (tons) | 1115.977 | 745.968 |
| (lower) | 0.301 | 0.344 |
| (upper) | 0.452 | 0.507 |
| (lower) | 0.140 | 0.0506 |
| (upper) | 0.204 | 0.101 |
| (lower) | 0.0014 | 5.06 × 10 |
| (upper) | 0.00818 | 0.004 |
| Component | MTTR (Days) |
|---|---|
| GIS 66 KV | 21 |
| GIS 225 KV | 21 |
| Transformer | 60 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schoefs, F.; Oumouni, M.; Ahmadivala, M.; Luxcey, N.; Dupriez-Robin, F.; Guerin, P. Unified System Analysis for Time-Variant Reliability of a Floating Offshore Substation. J. Mar. Sci. Eng. 2023, 11, 1924. https://doi.org/10.3390/jmse11101924
Schoefs F, Oumouni M, Ahmadivala M, Luxcey N, Dupriez-Robin F, Guerin P. Unified System Analysis for Time-Variant Reliability of a Floating Offshore Substation. Journal of Marine Science and Engineering. 2023; 11(10):1924. https://doi.org/10.3390/jmse11101924
Chicago/Turabian StyleSchoefs, Franck, Mestapha Oumouni, Morteza Ahmadivala, Neil Luxcey, Florian Dupriez-Robin, and Patrick Guerin. 2023. "Unified System Analysis for Time-Variant Reliability of a Floating Offshore Substation" Journal of Marine Science and Engineering 11, no. 10: 1924. https://doi.org/10.3390/jmse11101924