
Effects of Leading-Edge Tubercles on Three-Dimensional Flapping Foils

Abstract
:1. Introduction
2. Materials and Methods
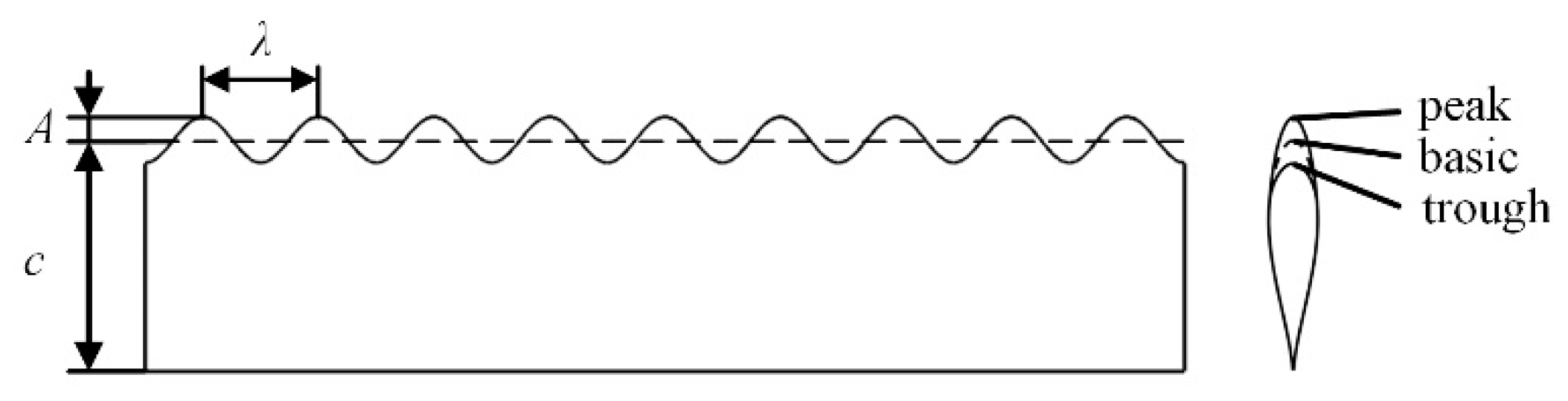
2.1. Description of Flapping Foils
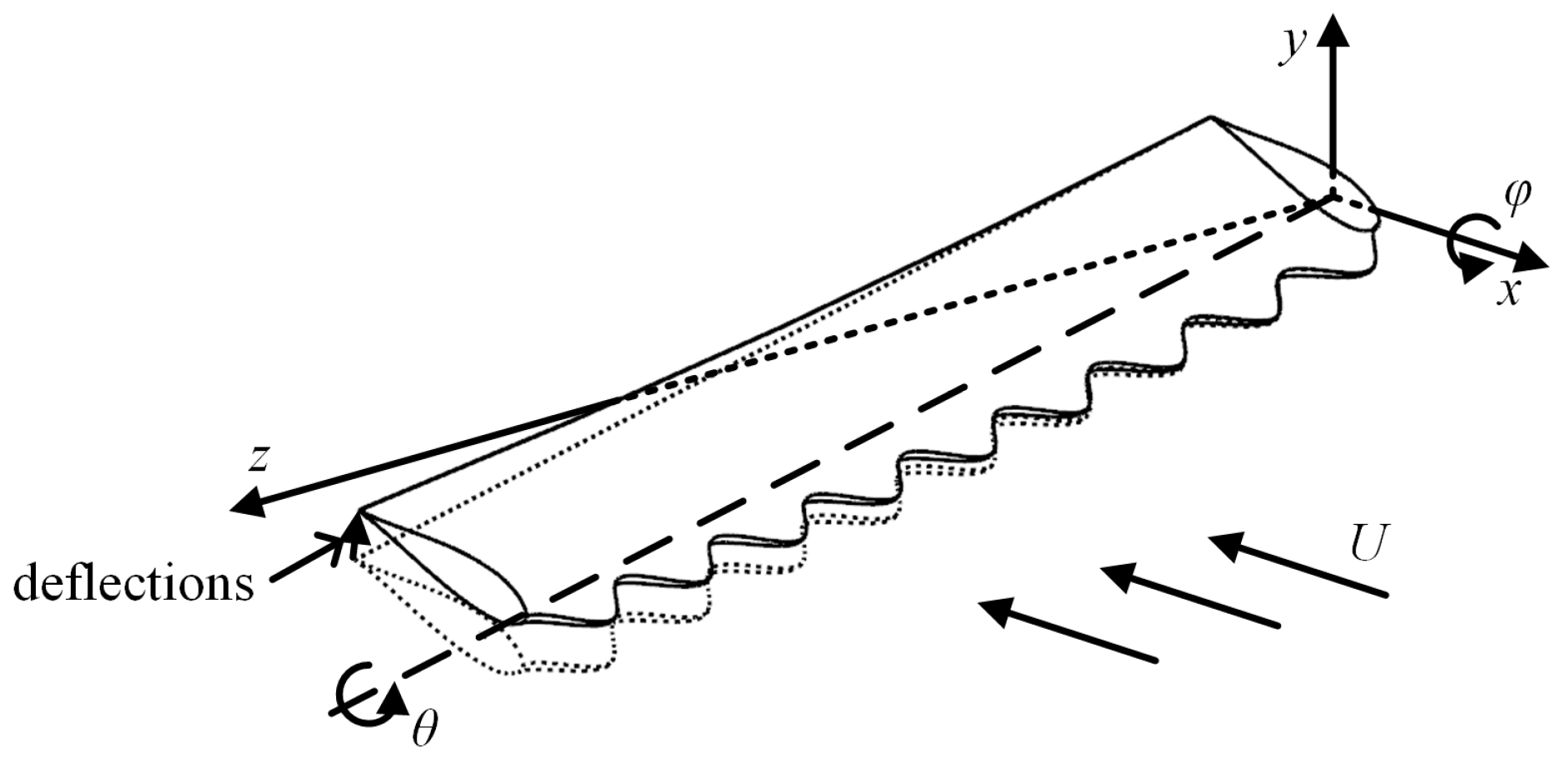
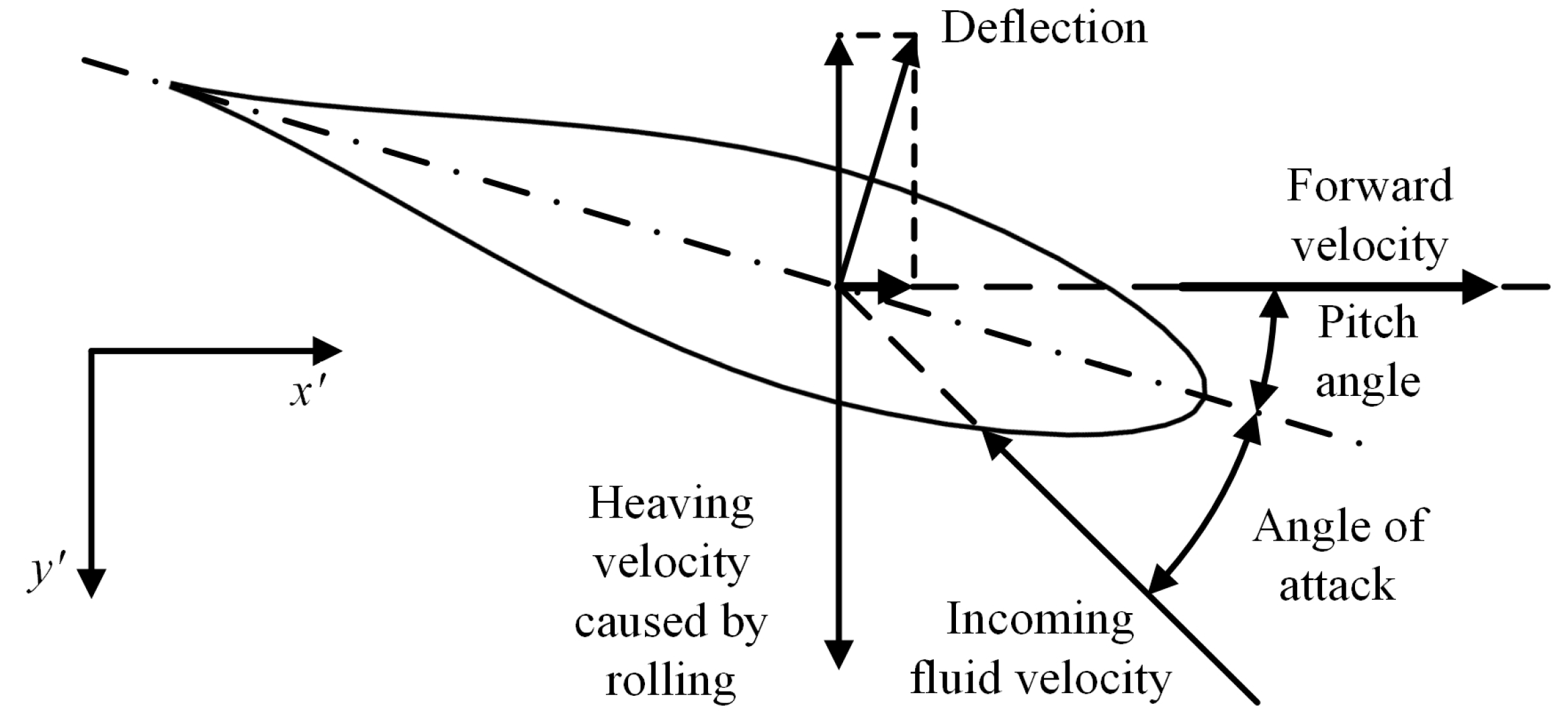
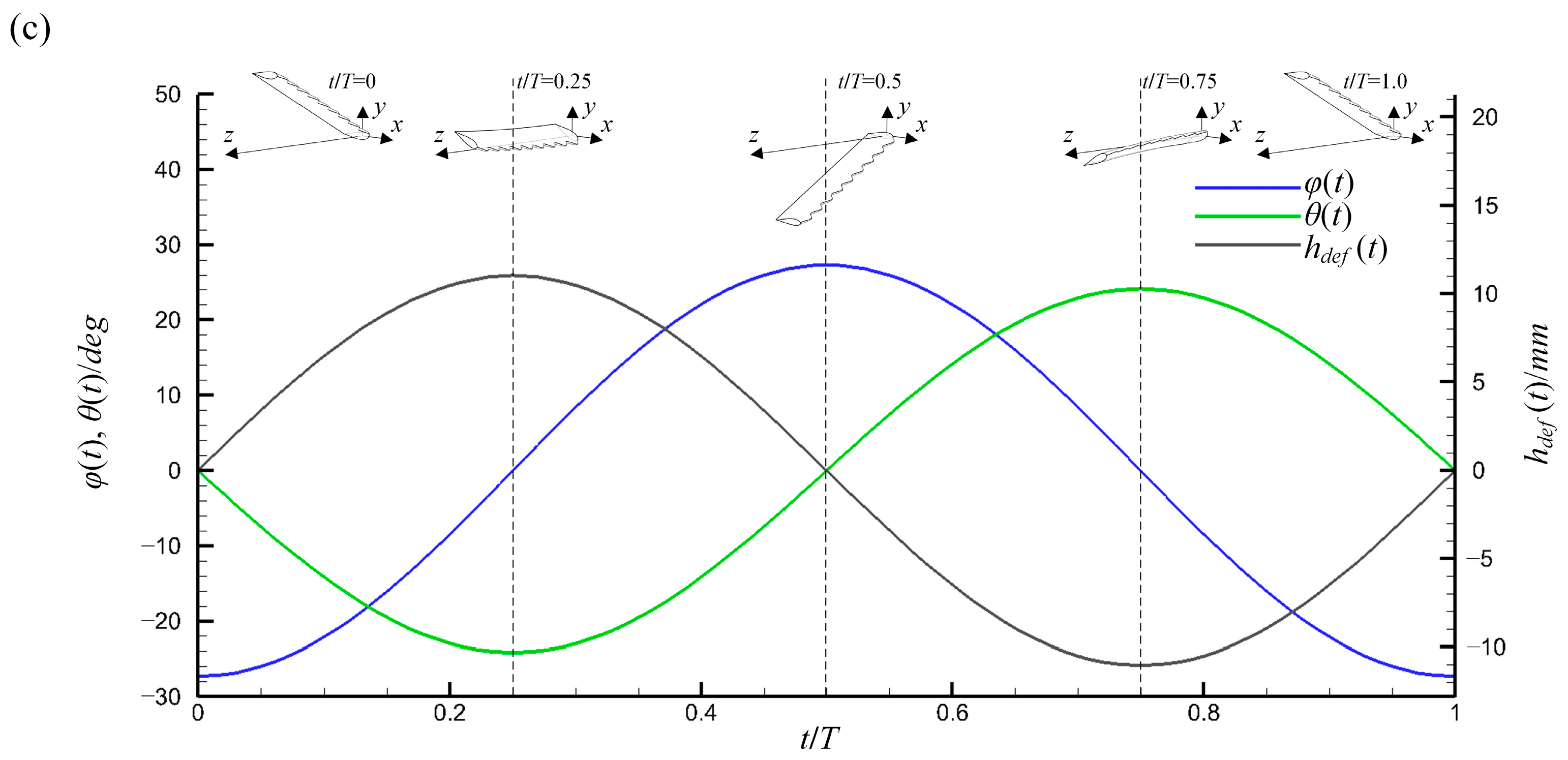
2.2. Kinematics Equations
2.2.1. Rigid Motion
2.2.2. Spanwise Motion for Flexibility
2.2.3. Dimensionless Parameters
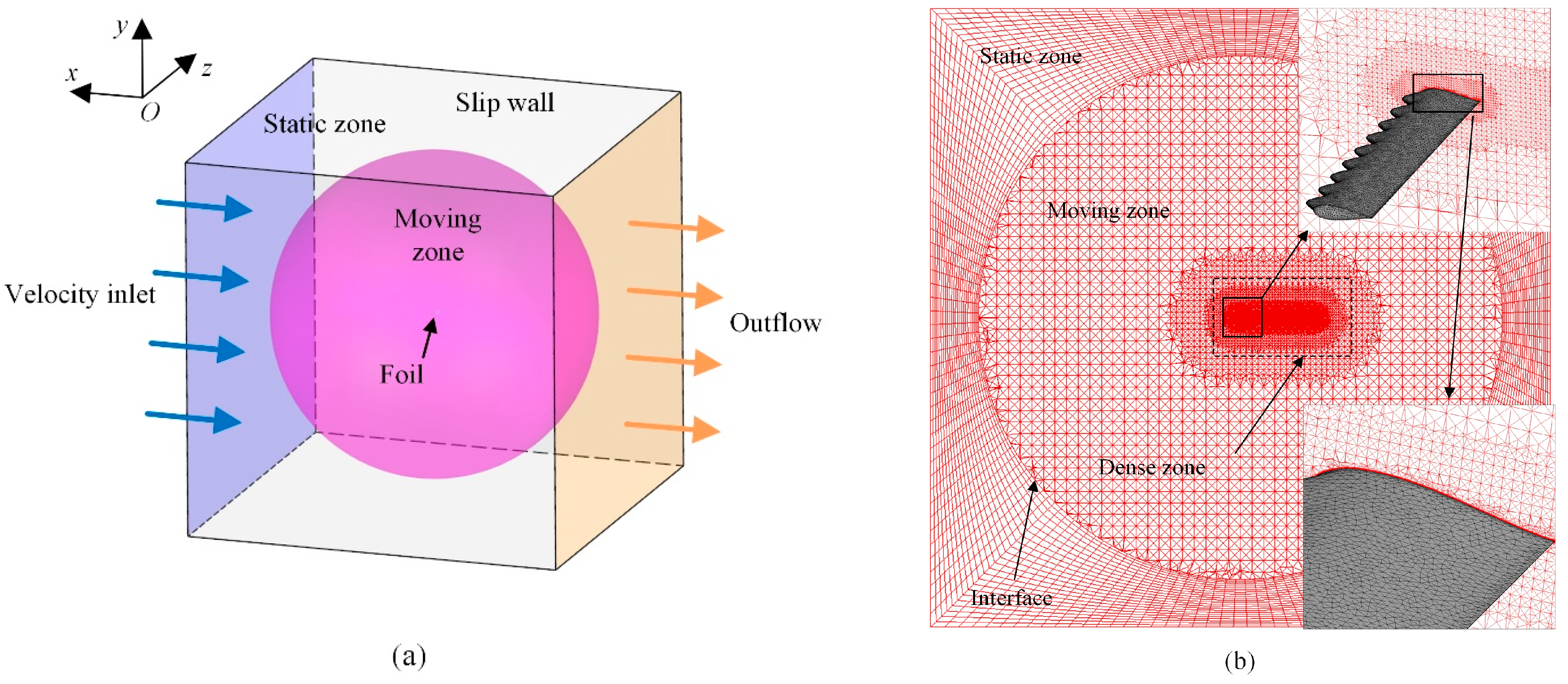
2.3. Approach
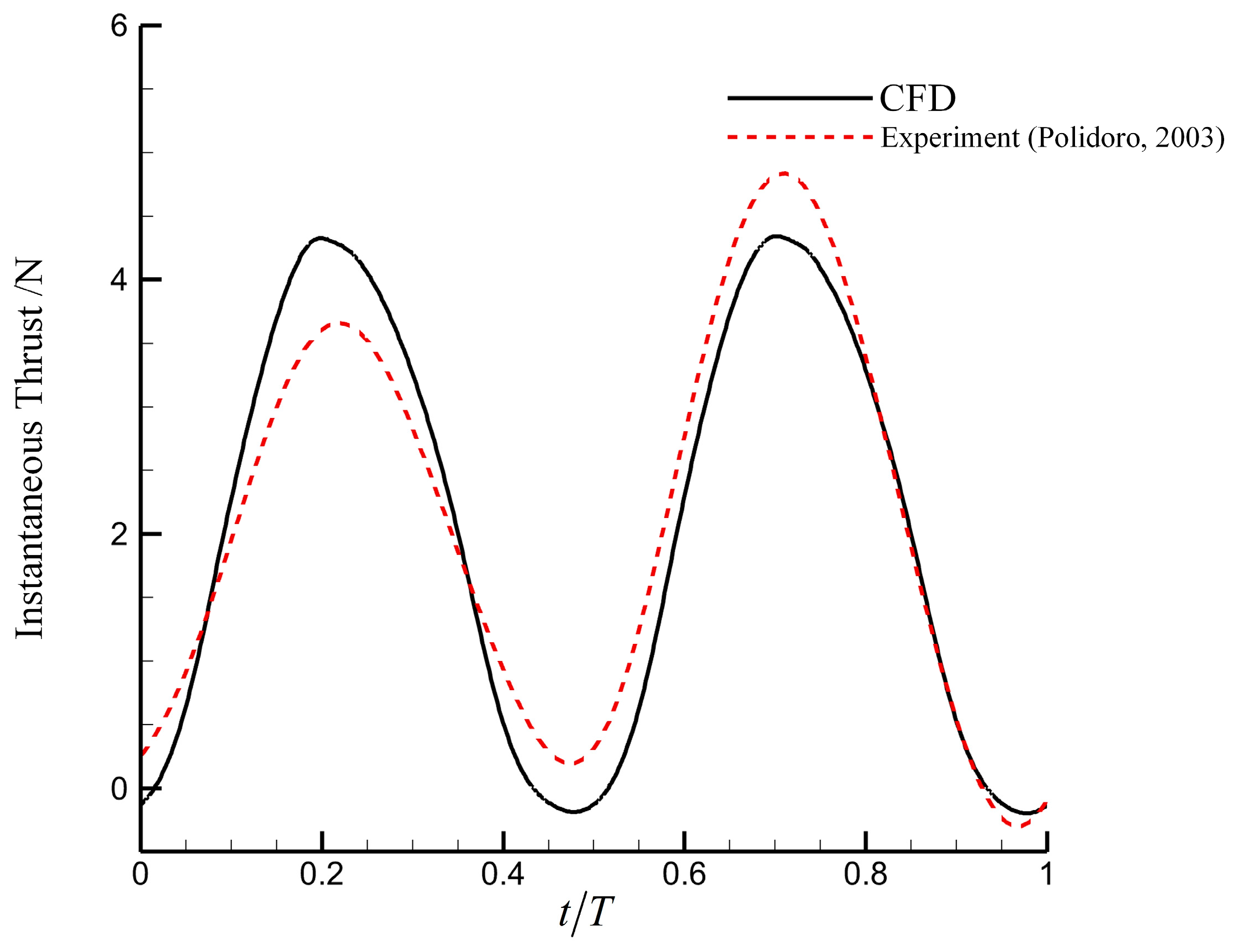
2.4. Validation and Verification
3. Results
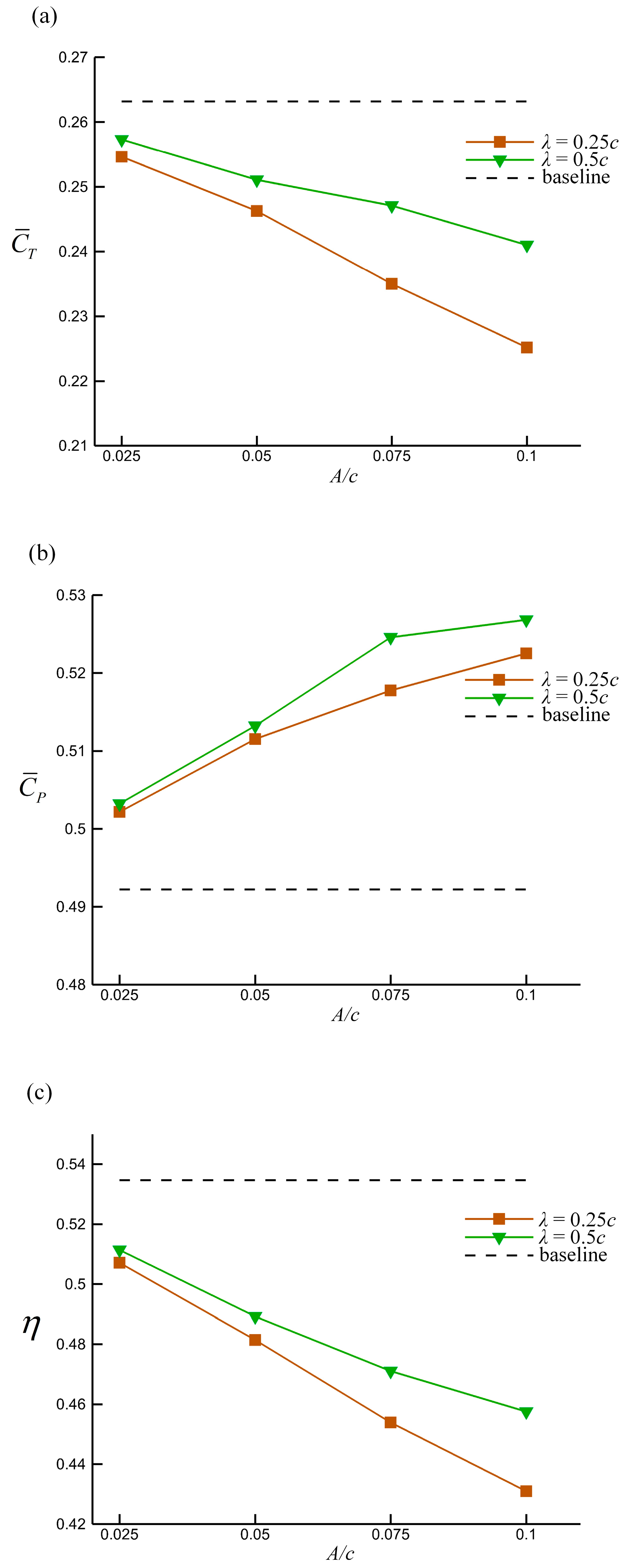
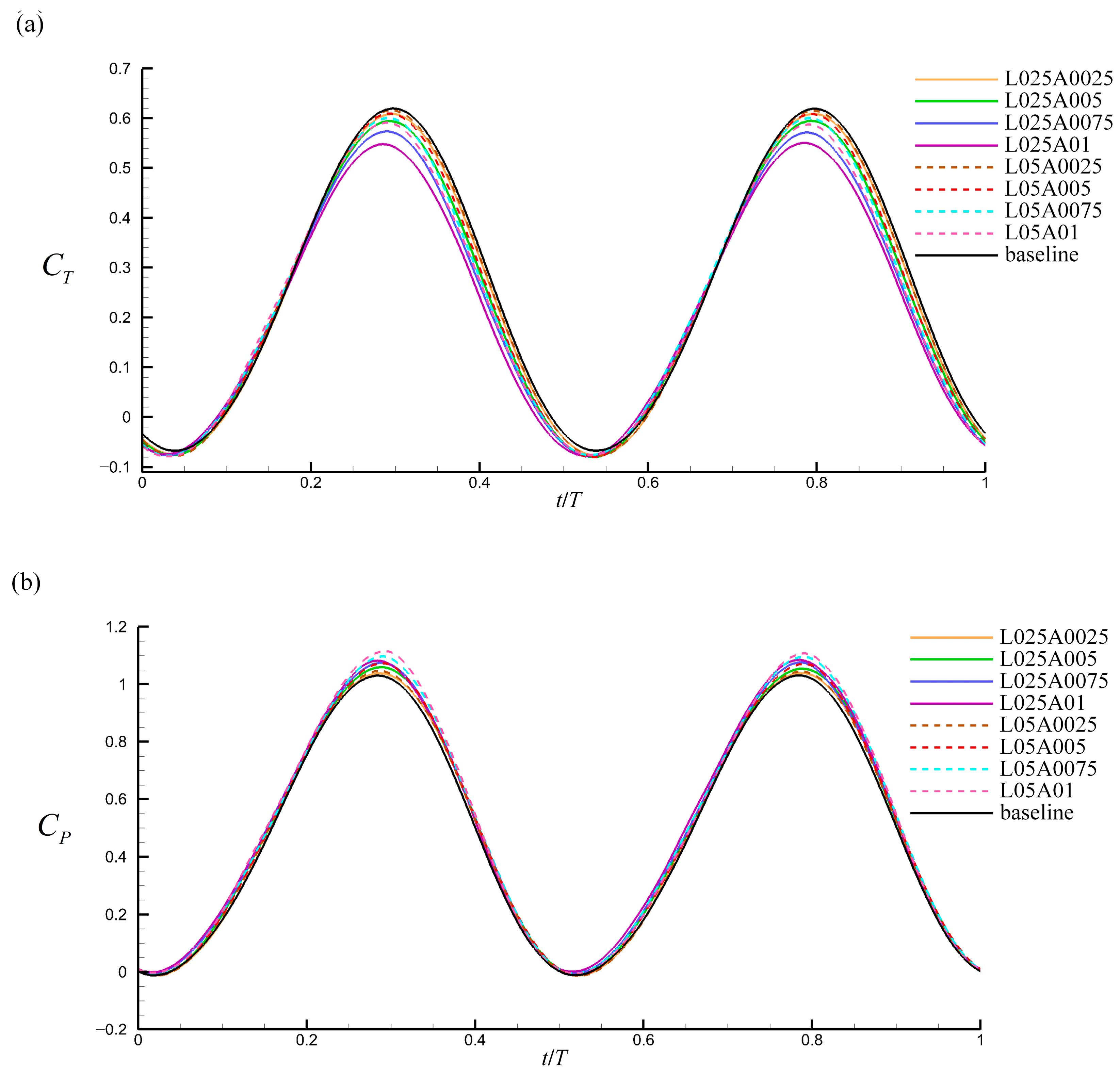
3.1. Effect of Tubercle Size
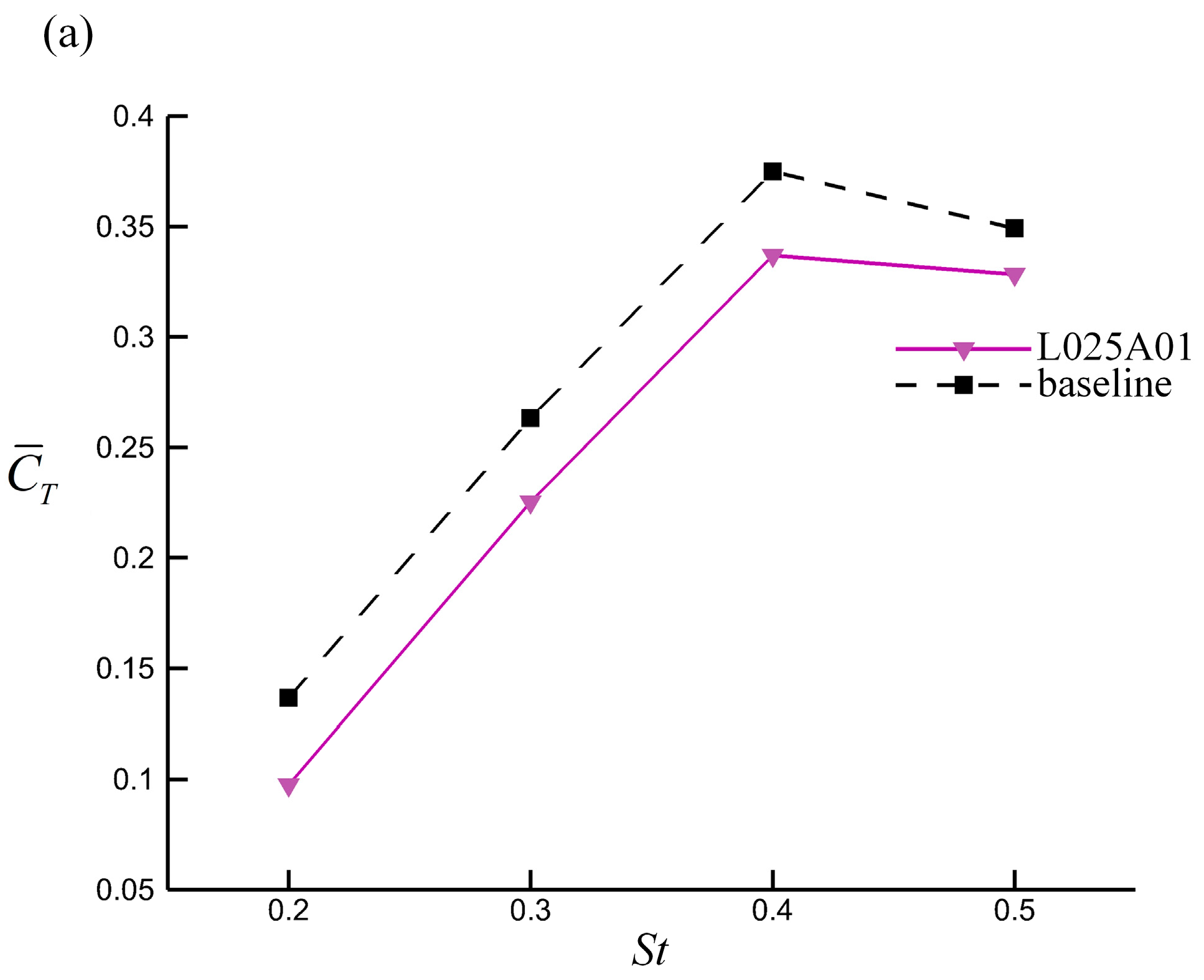
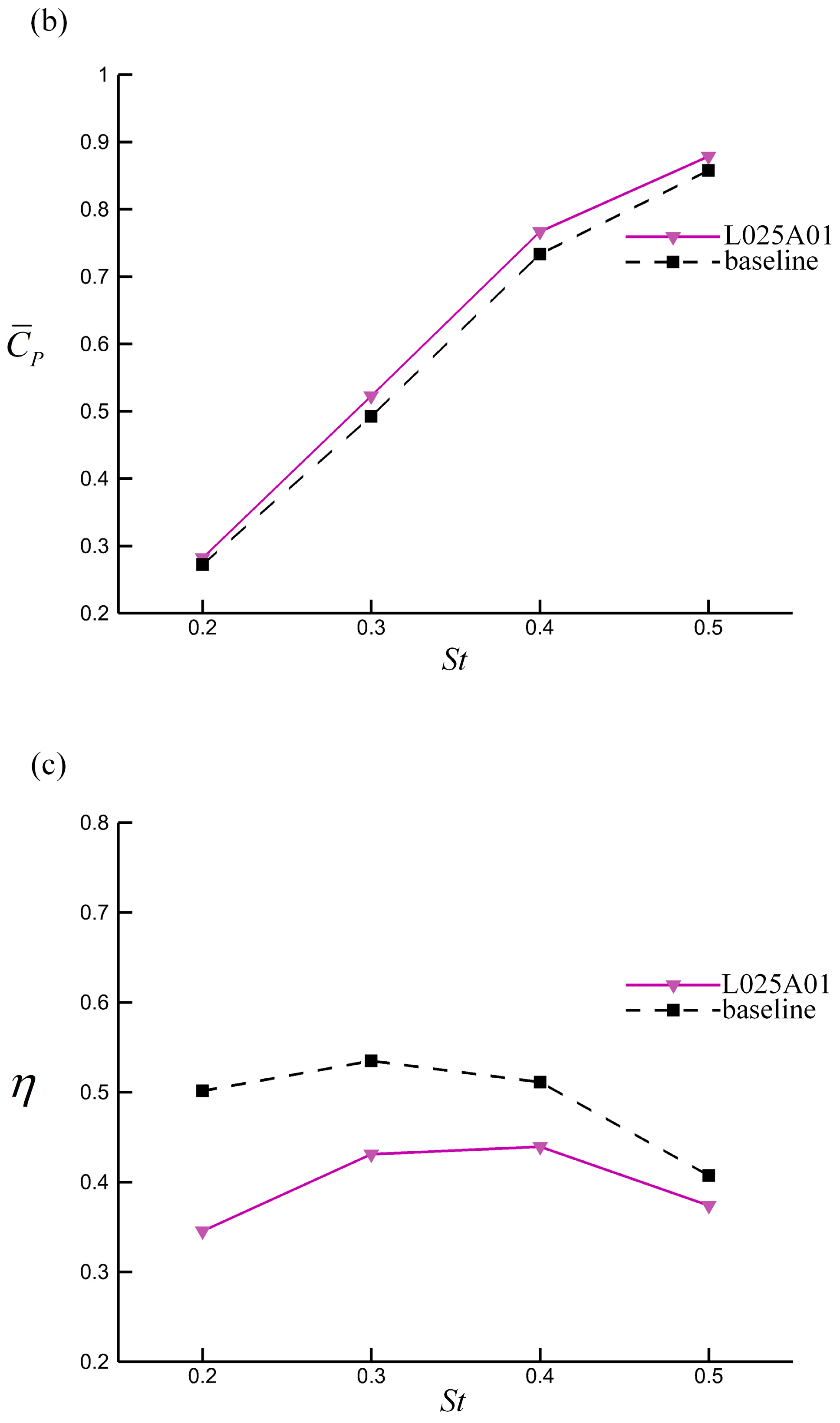
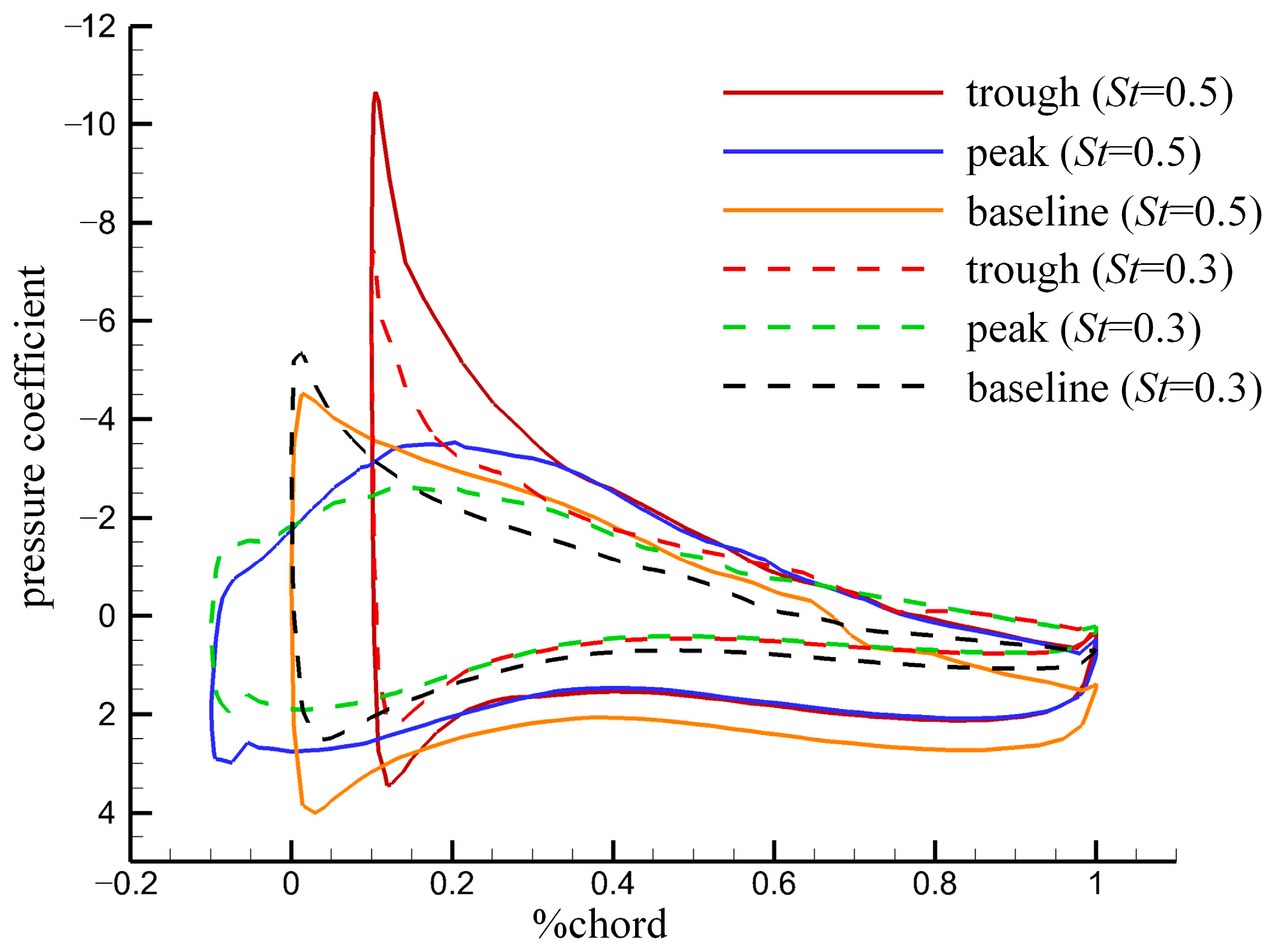
3.2. Effect of Strouhal Number
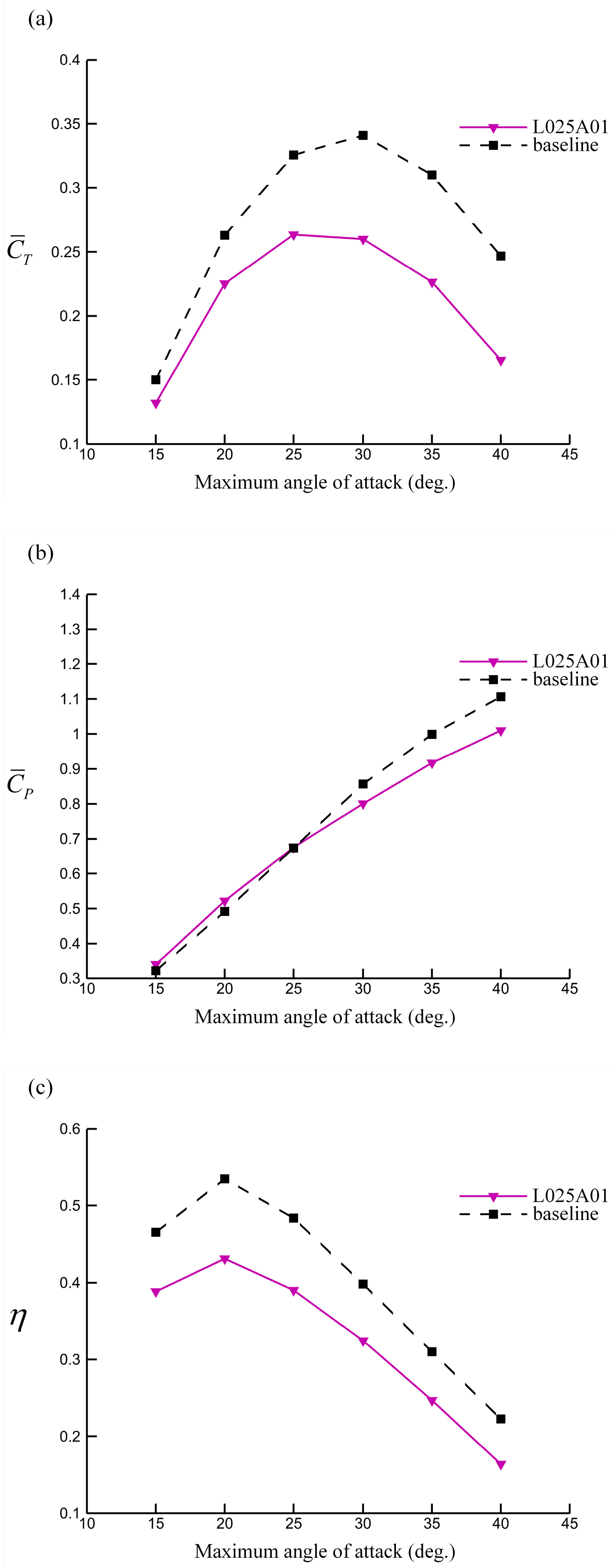
3.3. Effect of Maximum Angle of Attack
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, Y.; Hu, W.; Zhang, S. Performance of the Bio-Inspired Leading Edge Protuberances on a Static Wing and a Pitching Wing. J. Hydrodyn. Ser. B 2015, 26, 912–920. [Google Scholar] [CrossRef]
- Fish, F.E.; Battle, J.M. Hydrodynamic Design of the Humpback Whale Flipper. J. Morphol. 1995, 225, 51–60. [Google Scholar] [CrossRef] [PubMed]
- Miklosovic, D.S.; Murray, M.M.; Howle, L.E.; Fish, F.E. Leading-Edge Tubercles Delay Stall on Humpback Whale (Megaptera novaeangliae) Flippers. Phys. Fluids 2004, 16, L39. [Google Scholar] [CrossRef]
- Johari, H.; Henoch, C.; Custodio, D.; Levshin, A. Effects of Leading-Edge Protuberances on Airfoil Performance. AIAA J. 2007, 45, 2634–2642. [Google Scholar] [CrossRef]
- Zhang, M.M.; Wang, G.F.; Xu, J.Z. Aerodynamic Control of Low-Reynolds-Number Airfoil with Leading-Edge Protuberances. AIAA J. 2013, 51, 1960–1971. [Google Scholar] [CrossRef]
- Pedro, H.C.; Kobayashi, M. Numerical Study of Stall Delay on Humpback Whale Flippers. In Proceedings of the 46th AIAA Aerospace Sciences Meeting and Exhibit, Reno, Nevada, 7–10 January 2008. [Google Scholar]
- Skillen, A.; Revell, A.; Pinelli, A.; Piomelli, U.; Favier, J. Flow over a Wing with Leading-Edge Undulations. AIAA J. 2015, 53, 464–472. [Google Scholar] [CrossRef]
- Serson, D.; Meneghini, J.R.; Sherwin, S.J. Direct Numerical Simulations of the Flow around Wings with Spanwise Waviness. J. Fluid Mech. 2017, 826, 714–731. [Google Scholar] [CrossRef]
- Troll, M.; Shi, W.; Stark, C. Leading-Edge Tubercles Applied onto a Flapped Rudder; American Society of Mechanical Engineers Digital Collection: Hamburg, Germany, 2022. [Google Scholar]
- Perkins, M.; Elles, D.; Badlissi, G.; Mivehchi, A.; Dahl, J.; Licht, S. Rolling and Pitching Oscillating Foil Propulsion in Ground Effect. Bioinspir. Biomim. 2017, 13, 016003. [Google Scholar] [CrossRef]
- Li, C.; Dong, H. Three-Dimensional Wake Topology and Propulsive Performance of Low-Aspect-Ratio Pitching-Rolling Plates. Phys. Fluids 2016, 28, 071901. [Google Scholar] [CrossRef]
- Polidoro, V. Flapping Foil Propulsion for Cruising and Hovering Autonomous Underwater Vehicles; Massachusetts Institute of Technology: Cambridge, MA, USA, 2003. [Google Scholar]
- Techet, A.H. Propulsive Performance of Biologically Inspired Flapping Foils at High Reynolds Numbers. J. Exp. Biol. 2008, 211, 274–279. [Google Scholar] [CrossRef]
- Heathcote, S.; Wang, Z.; Gursul, I. Effect of Spanwise Flexibility on Flapping Wing Propulsion. J. Fluids Struct. 2008, 24, 183–199. [Google Scholar] [CrossRef]
- Le, T.Q.; Ko, J.H. Effect of Hydrofoil Flexibility on the Power Extraction of a Flapping Tidal Generator via Two- and Three-Dimensional Flow Simulations. Renew. Energy 2015, 80, 275–285. [Google Scholar] [CrossRef]
- Ozen, C.A.; Rockwell, D. Control of Vortical Structures on a Flapping Wing via a Sinusoidal Leading-Edge. Phys. Fluids 2010, 22, 021701. [Google Scholar] [CrossRef]
- Stanway, M.J. Hydrodynamic Effects of Leading-Edge Tubercles on Control Surfaces and in Flapping Foil Propulsion. Master’s Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2008. [Google Scholar]
- Anwar, M.B.; Shahzad, A.; Mumtaz Qadri, M.N. Investigating the Effects of Leading-Edge Tubercles on the Aerodynamic Performance of Insect-like Flapping Wing. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2021, 235, 330–341. [Google Scholar] [CrossRef]
- Miklosovic, D.S.; Murray, M.M.; Howle, L.E. Experimental Evaluation of Sinusoidal Leading Edges. J. Aircr. 2007, 44, 1404–1408. [Google Scholar] [CrossRef]
- Read, D.A.; Hover, F.S.; Triantafyllou, M.S. Forces on Oscillating Foils for Propulsion and Maneuvering. J. Fluids Struct. 2003, 17, 163–183. [Google Scholar] [CrossRef]
- Andrun, M.; Blagojević, B.; Bašić, J.; Klarin, B. Impact of CFD Simulation Parameters in Prediction of Ventilated Flow on a Surface-Piercing Hydrofoil. Ship Technol. Res. 2021, 68, 1–13. [Google Scholar] [CrossRef]
- ANSYS FLUENT 12.0 User’s Guide. Available online: https://www.afs.enea.it/project/neptunius/docs/fluent/html/ug/node236.htm (accessed on 4 September 2023).
- Ansys® Academic Research Fluent, Release 19.0, Help System; ANSYS Fluent User’s Guide; ANSYS, Inc.: Canonsburg, PA, USA, 2018.
- Menter, F.R.; Kuntz, M.; Langtry, R. Ten Years of Industrial Experience with the SST Turbulence Model. Heat Mass Transf. 2003, 4, 625–632. [Google Scholar]
- Mishra, A.A.; Mukhopadhaya, J.; Iaccarino, G.; Alonso, J. Uncertainty Estimation Module for Turbulence Model Predictions in SU2. AIAA J. 2019, 57, 1066–1077. [Google Scholar] [CrossRef]
- Duraisamy, K.; Iaccarino, G.; Xiao, H. Turbulence Modeling in the Age of Data. Annu. Rev. Fluid Mech. 2019, 51, 357–377. [Google Scholar] [CrossRef]
- Wu, X.; Zhang, X.; Tian, X.; Li, X.; Lu, W. A Review on Fluid Dynamics of Flapping Foils. Ocean Eng. 2020, 195, 106712. [Google Scholar] [CrossRef]
- Roache, P.J. Quantification of Uncertainty in Computational Fluid Dynamics. Annu. Rev. Fluid Mech. 1997, 29, 123–160. [Google Scholar] [CrossRef]
- Celik, I.B.; Ghia, U.; Roache, P.J.; Freitas, C.J. Procedure for Estimation and Reporting of Uncertainty Due to Discretization in CFD Applications. J. Fluids Eng. 2008, 130, 078001. [Google Scholar]
- Li, J.; Wang, P.; An, X.; Lyu, D.; He, R.; Zhang, B. Investigation on Hydrodynamic Performance of Flapping Foil Interacting with Oncoming Von Kármán Wake of a D-Section Cylinder. J. Mar. Sci. Eng. 2021, 9, 658. [Google Scholar] [CrossRef]
- Custodio, D.; Henoch, C.W.; Johari, H. Aerodynamic Characteristics of Finite Span Wings with Leading-Edge Protuberances. AIAA J. 2015, 53, 1878–1893. [Google Scholar] [CrossRef]
- Serson, D.; Meneghini, J.R.; Sherwin, S.J. Direct Numerical Simulations of the Flow around Wings with Spanwise Waviness at a Very Low Reynolds Number. Comput. Fluids 2017, 146, 117–124. [Google Scholar] [CrossRef]
- Stanway, M.J.; Techet, A.H. Spanwise Visualization of the Flow around a Three-Dimensional Foil with Leading Edge Protuberances. APS Div. Fluid Dyn. Meet. Abstr. 2006, 59, EO.003. [Google Scholar]
- Shi, W.; Rosli, R.; Atlar, M.; Norman, R.; Wang, D.; Yang, W. Hydrodynamic Performance Evaluation of a Tidal Turbine with Leading-Edge Tubercles. Ocean Eng. 2016, 117, 246–253. [Google Scholar] [CrossRef]
- Stark, C.; Shi, W.; Troll, M. Cavitation Funnel Effect: Bio-Inspired Leading-Edge Tubercle Application on Ducted Marine Propeller Blades. Appl. Ocean Res. 2021, 116, 102864. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
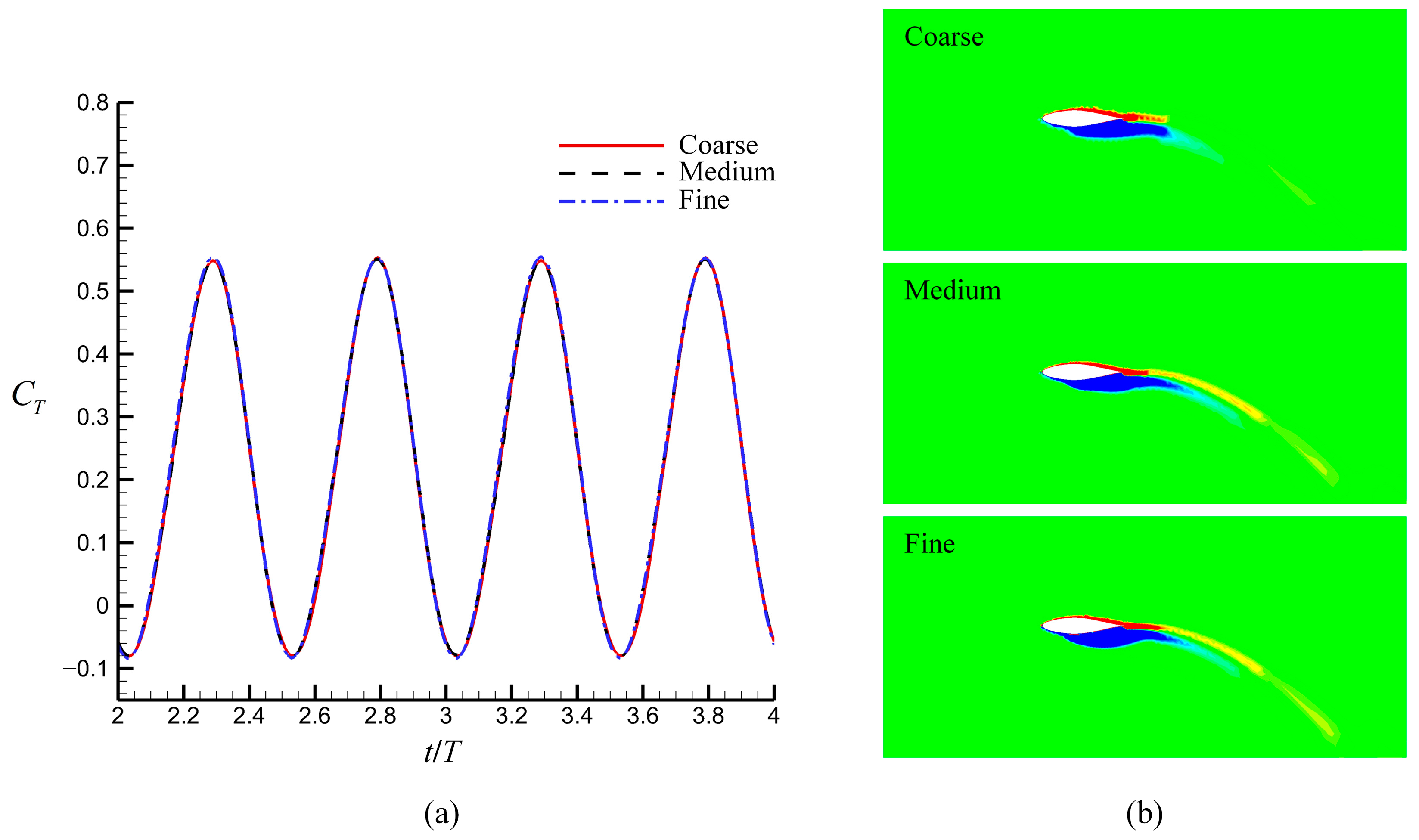
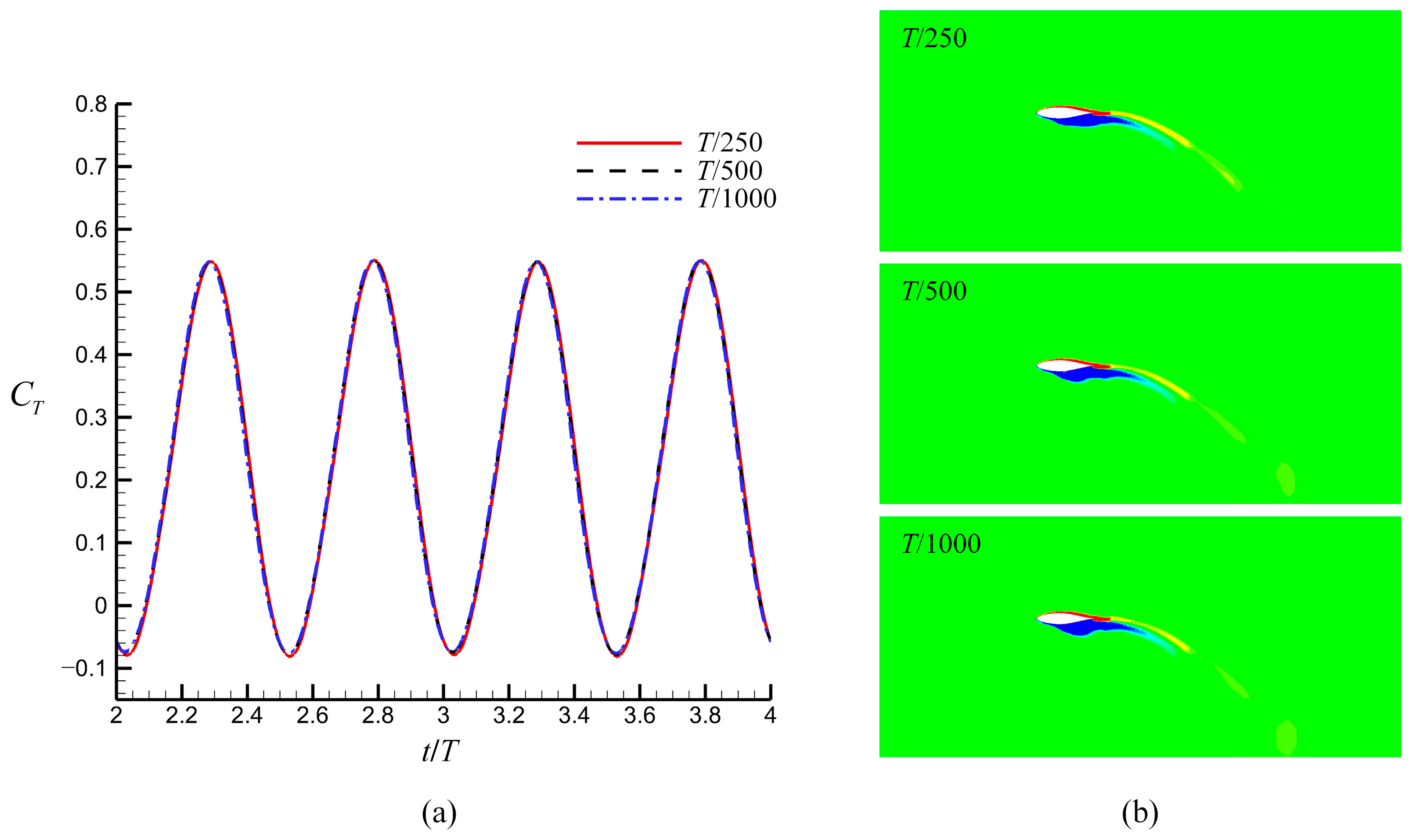
| Mesh No. | Mesh Densities | Cell Numbers (×106) | Time Steps | Mean Thrust Coefficient | Relative Error/% | /% | /% |
|---|---|---|---|---|---|---|---|
| 3 | Coarse | 3.23 | T/250 | 0.2235 | −0.75 | 1.06 | 0.13 |
| 2 | Medium | 6.58 | T/250 | 0.2247 | −0.20 | ||
| T/500 | 0.2252 | 0.00 | |||||
| T/1000 | 0.2238 | −0.62 | |||||
| 1 | Fine | 10.04 | T/250 | 0.2271 | 0.86 |
| No. | Foil Name | A/c | λ/c | St | αmax (°) | Re |
|---|---|---|---|---|---|---|
| 1 | L025A0025 | 0.025 | 0.25 | [0.2, 0.5], interval 0.1 | 20 | 50,000 |
| 0.3 | [15, 40], interval 5 | 50,000 | ||||
| 2 | L025A005 | 0.05 | 0.25 | 0.3 | 20 | 50,000 |
| 3 | L025A0075 | 0.075 | 0.25 | 0.3 | 20 | 50,000 |
| 4 | L025A01 | 0.1 | 0.25 | 0.3 | 20 | 50,000 |
| 5 | L05A0025 | 0.025 | 0.5 | 0.3 | 20 | 50,000 |
| 6 | L05A005 | 0.05 | 0.5 | 0.3 | 20 | 50,000 |
| 7 | L05A0075 | 0.075 | 0.5 | 0.3 | 20 | 50,000 |
| 8 | L05A01 | 0.1 | 0.5 | 0.3 | 20 | 50,000 |
| 9 | Baseline | 0 | 0 | [0.2, 0.5], interval 0.1 | 20 | 50,000 |
| 0.3 | [15, 40], interval 5 | 50,000 |
| St | αmax (°) | ω (Rad/s) | (s) | CFL | θ0 (°) | φ0 (°) | B (mm) |
|---|---|---|---|---|---|---|---|
| 0.2 | 20 | 2.09 | 0.0060 | 1.07 | 12.33 | 27.28 | 22.5 |
| 0.3 | 15 | 3.14 | 0.0040 | 0.71 | 30.08 | 27.28 | 22.5 |
| 0.3 | 20 | 3.14 | 0.0040 | 0.71 | 24.13 | 27.28 | 22.5 |
| 0.3 | 25 | 3.14 | 0.0040 | 0.71 | 18.74 | 27.28 | 22.5 |
| 0.3 | 30 | 3.14 | 0.0040 | 0.71 | 13.57 | 27.28 | 22.5 |
| 0.3 | 35 | 3.14 | 0.0040 | 0.71 | 8.47 | 27.28 | 22.5 |
| 0.3 | 40 | 3.14 | 0.0040 | 0.71 | 3.40 | 27.28 | 22.5 |
| 0.4 | 20 | 4.19 | 0.0030 | 0.54 | 34.87 | 27.28 | 22.5 |
| 0.5 | 20 | 5.24 | 0.0024 | 0.43 | 46.17 | 27.28 | 22.5 |
| Foil Name | CTmax | Relative Error/% | CPmax | Relative Error/% |
|---|---|---|---|---|
| L025A0025 | 0.6088 | −1.66 | 1.0385 | 0.80 |
| L025A005 | 0.5946 | −3.95 | 1.0535 | 2.26 |
| L025A0075 | 0.5715 | −7.68 | 1.0755 | 4.39 |
| L025A01 | 0.5505 | −11.08 | 1.0841 | 5.23 |
| L05A0025 | 0.6149 | −0.68 | 1.0438 | 1.31 |
| L05A005 | 0.6085 | −1.71 | 1.0702 | 3.88 |
| L05A0075 | 0.6004 | −3.03 | 1.0947 | 6.26 |
| L05A01 | 0.5873 | −5.13 | 1.1066 | 7.41 |
| baseline | 0.6191 | 0.00 | 1.0302 | 0.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, R.; Wang, X.; Li, J.; Liu, X.; Song, B. Effects of Leading-Edge Tubercles on Three-Dimensional Flapping Foils. J. Mar. Sci. Eng. 2023, 11, 1882. https://doi.org/10.3390/jmse11101882
He R, Wang X, Li J, Liu X, Song B. Effects of Leading-Edge Tubercles on Three-Dimensional Flapping Foils. Journal of Marine Science and Engineering. 2023; 11(10):1882. https://doi.org/10.3390/jmse11101882
Chicago/Turabian StyleHe, Ruixuan, Xinjing Wang, Jian Li, Xiaodong Liu, and Baowei Song. 2023. "Effects of Leading-Edge Tubercles on Three-Dimensional Flapping Foils" Journal of Marine Science and Engineering 11, no. 10: 1882. https://doi.org/10.3390/jmse11101882