1. Introduction
Autonomous underwater vehicles (AUVs) are robots that are capable of moving underwater without operator assistance along trajectories determined according to the missions. AUV missions may include, for example, survey and exploration activities, including wreck search, geological exploration, seabed mapping, surveys of lengthy objects (submarine cables, pipelines), and environmental monitoring of water areas. At the same time, the AUV must have a long range [
1] and, hence, solve complex navigation and positioning problems in both single-mission and group operations. The development of robust navigation strategies is necessary to ensure the proper execution of the AUV mission [
2].
With the development of airborne and land-based navigation technologies, underwater navigation technologies have also evolved significantly [
3,
4,
5]. However, due to the specificity of the underwater environment, there is still a gap between the navigation and positioning accuracy of AUVs compared to airborne and land-based ones, which needs to be eliminated [
6]. This is mainly due to the fact that the Global Positioning System (GPS) is not available in the underwater environment [
7].
AUV positioning using only onboard sensors such as a Doppler velocity logger (DVL) or an inertial measurement unit (IMU) will have an accumulated error [
8]. AUVs are able to use their navigation sensors to obtain relevant measurement information for subsequent integration with underwater acoustic communication technologies, solving the positioning and navigation problem [
9,
10].
Due to the complexity of the marine environment, a single navigation method cannot meet the requirements of high accuracy and stability [
11,
12]. Approaches to determining the positioning error of AUVs are defined in [
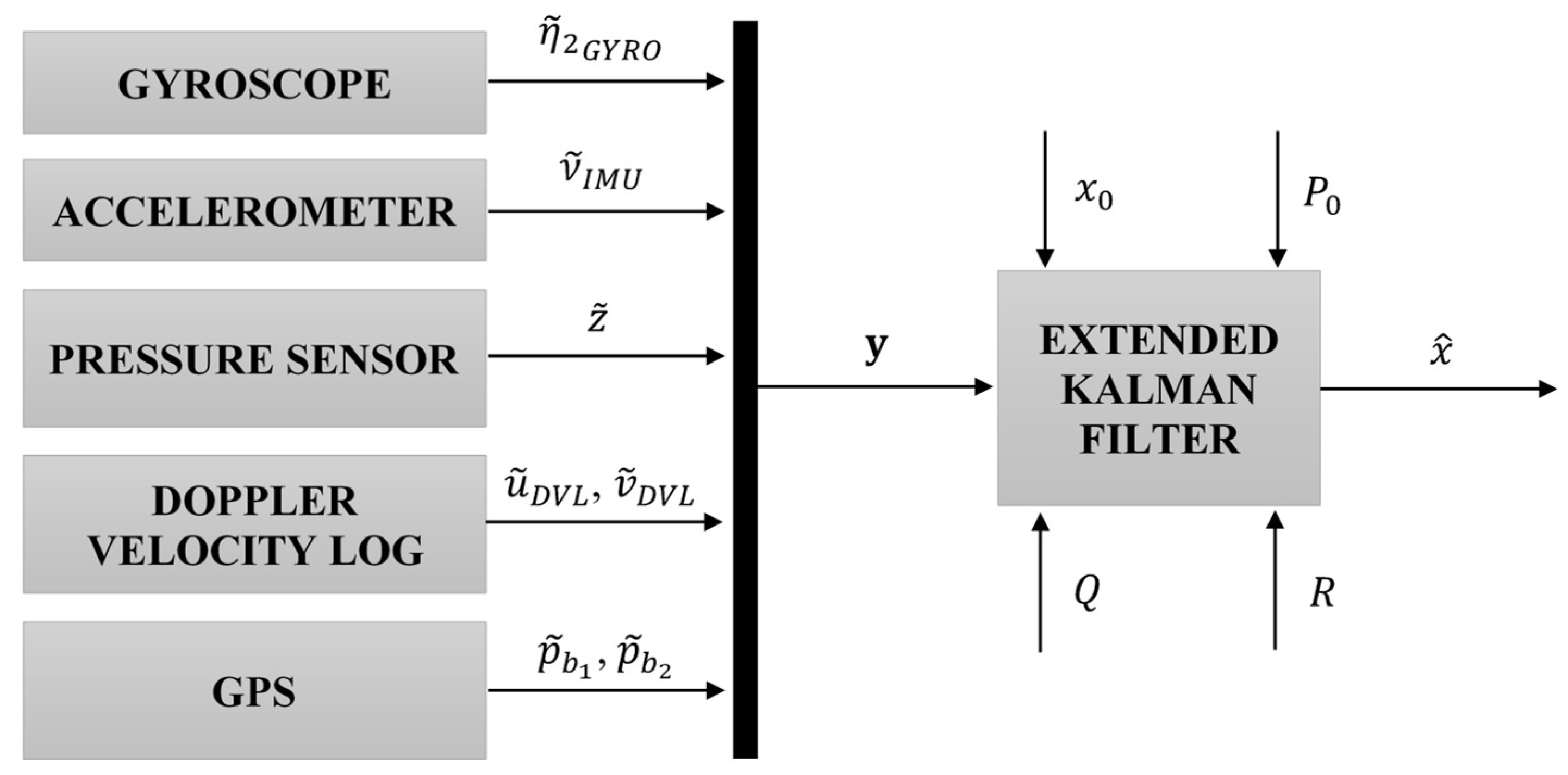
8]. These approaches are based on the fact that the AUV navigation complex consists of a hydroacoustic and onboard system. The onboard navigation system may include an inertial measurement unit (IMU), a Doppler velocity logger (DVL), and a pressure sensor (PS) [
13]. Moreover, GPS, DVL, and PS separately provide position, velocity, and depth information, which are used to correct the navigation data [
13,
14,
15].
In contrast to airborne or ground-based drones, AUVs are dealing with a uniquely difficult navigational problem due to the lack of high-precision satellite navigation underwater. Of course, for remotely piloted vehicles, additional navigation information (position, speed) may be sent to the vehicle via fiber optic cable. However, for unmanned submersibles without cable communication, this is almost impossible to implement in practice [
16]. There are three main methods of AUV navigation in the literature: dead reckoning and inertial navigation, acoustic navigation, and geophysical navigation methods [
17].
The first method is based primarily on inertial navigation equipment, which has become financially affordable, especially after the creation of microelectromechanical systems (MEMSs).
Since measurement errors of inertial navigation equipment are monotonically increasing and unlimited, other aids (e.g., differential global positioning system for position estimation, Doppler velocity log or correlated speed log for velocity estimation; pressure sensors for depth estimation, etc.) must be integrated to improve positioning system accuracy [
18].
Acoustic navigation is based on using the AUV transponder’s acoustic signals to determine its position. The most common methods are the long baseline, which uses at least two widely separated transponders mounted usually on the seafloor, and the ultra-short baseline, which uses GPS-calibrated transponders on an accompanying surface vessel. Both methods have a limited range (about 10 km for individual LBLs, about 4 km in deep water, and less than 0.5 km in shallow water for USBL networks). Because LBL requires the installation of beacons, its applicability is limited to missions performed in stationary locations (e.g., harbor defense). In addition, beacon installation and maintenance are complicated and expensive operations. USBL may not be applicable in some military applications because of tactical limitations, as it requires an accompanying vessel [
19].
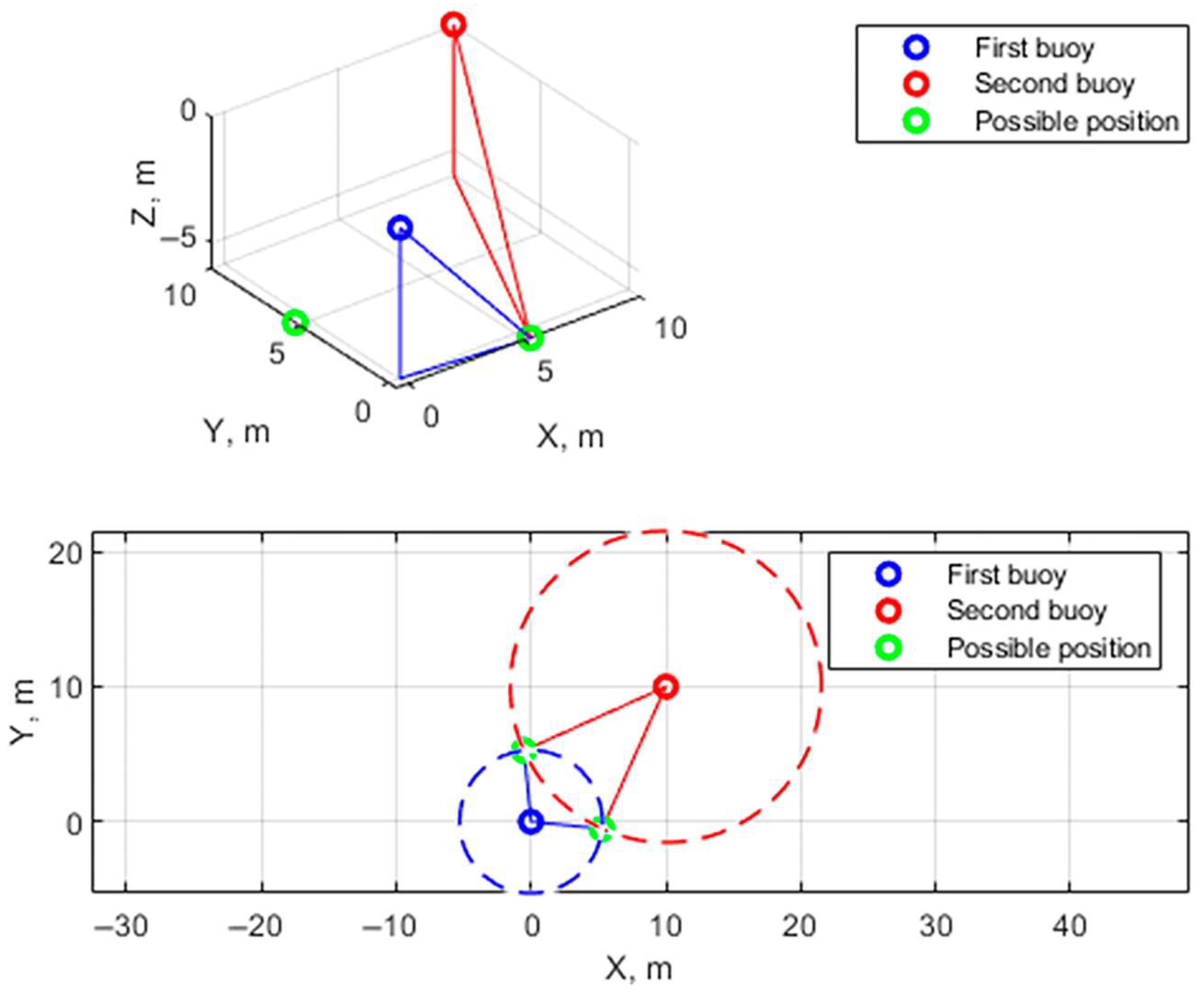
The most commonly used method of obtaining absolute position information underwater is through the buoys. These buoys are in known locations, and the AUV receives the range and/or azimuth to several of them and then calculates its position through trilateration or triangulation. Based on the location of the transceivers, three different basic systems can be distinguished: long baseline (LBL) systems, short baseline (SBL) systems, and ultra-short baseline (USBL) systems [
20,
21].
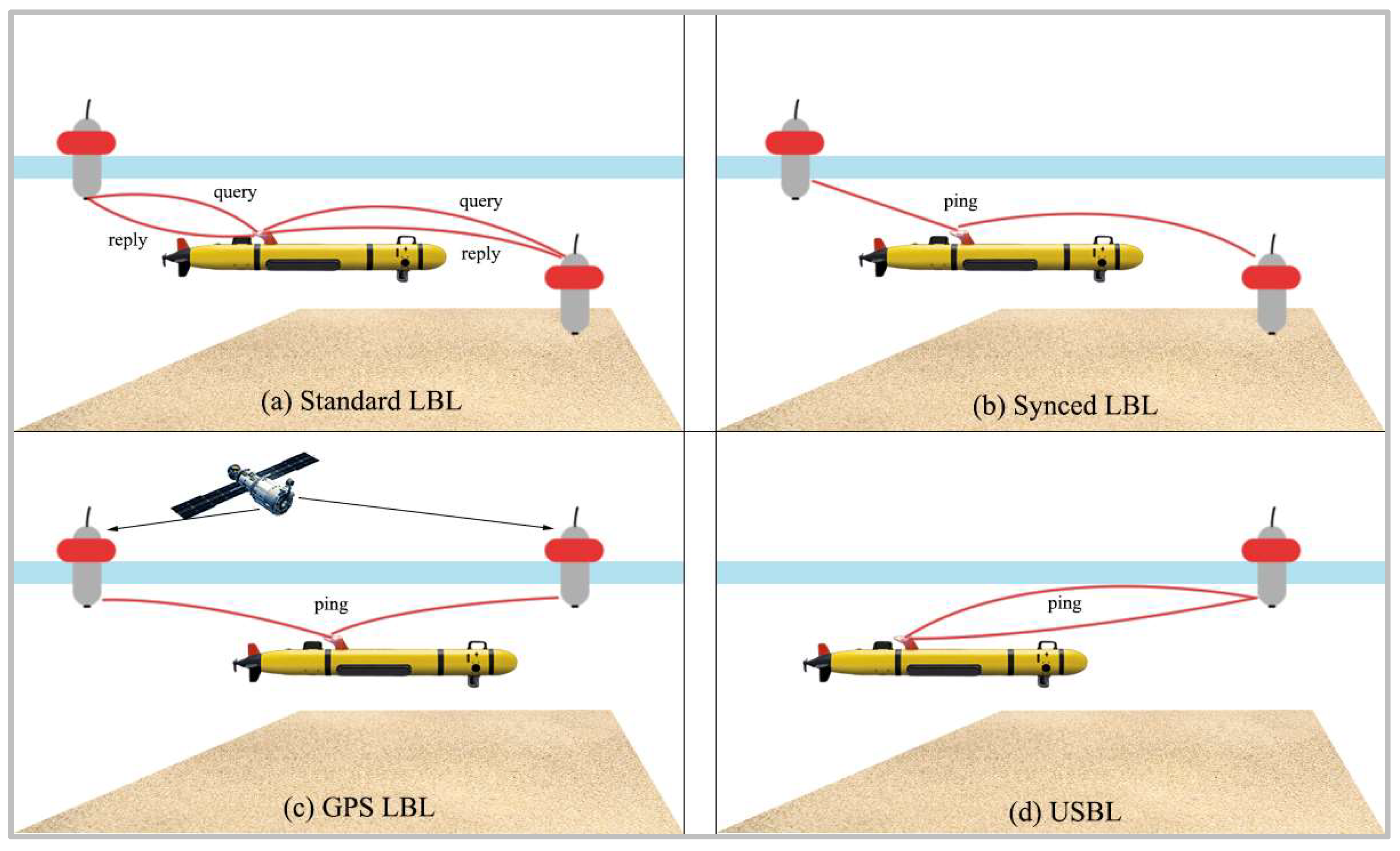
A typical configuration for a standard long baseline is shown in
Figure 1a. Two or more buoys are deployed around the perimeter of the area in which the AUV will operate. These buoys are anchored and float on the surface or, especially in deeper waters, several meters above the seafloor. Each unit receives acoustic requested pings from a common receiving channel. After receiving a request ping from the AUV, each unit waits for a unique, specific response time and then sends a ping in response via its own separate transmission channel.
The standard LBL systems mentioned earlier are not well suited for large groups, as only one AUV can access the buoy network at a time and receive position updates. Therefore, the position update interval increases with the number of vehicles.
New LBL systems, like the one shown in
Figure 1b, synchronized the clocks of the buoys and the AUV transceiver units. The buoys broadcast a ping containing a unique identifier at certain intervals. When the AUV receives this ping, the known beacon broadcast schedule and the timing of the synchronized clocks ensure that the vehicle knows when the ping was sent and can directly calculate the OWTT (one-way travel time).
Another improvement over conventional LBLs is the system shown in
Figure 1c. Relying on the setup in
Figure 1b, the buoys now transmit their GPS positions along with a unique identifier. As with the system described earlier, the AUV does not need to send queries to the buoys. With the buoy positions embedded in the ping, the buoys are free to swim, and there is no need to save their coordinates to the AUV before deployment.
The beacons’ placement depends on the task conditions. Two or more beacons are placed at known locations, either as buoys on the water surface or moored on the seafloor. To increase the area of AUV operation, an approach in which surface vehicles are moved by mobile beacons for AUVs is proposed in [
22,
23,
24]. A similar approach is proposed in the “Widely scalable Mobile Underwater Sonar Technology” project [
25].
Among the existing solutions for the positioning problem, the work [
26] stands out, which considered a system of sensor data fusion, among which the values of slant range from three hydroacoustic buoys located on the surface. A similar problem was presented in [
27], except that four buoys are already involved. In the presented sources, it is possible to allocate essential deficiencies, such as the absence of tuning parameters for the filter and sensor fusion methodology. Moreover, quality metrics for filter errors are not given, which makes it difficult to determine the accuracy of the state recovery algorithms.
The use of hydroacoustic communication devices to obtain relative observations is an effective and reliable measurement method. However, AUVs are used in complex marine environments where unfavorable conditions may affect the sensors, leading to unknown errors in the measurement system. This inevitably leads to a decrease in the accuracy and stability of the filtering procedure.
The main problem in solving the AUV navigation and positioning problem is the state estimation and accurate collection of observation information. Filtering algorithms for AUV state estimation are a key factor in guaranteeing satisfactory underwater navigation accuracy.
Various filter models and algorithms have been proposed to improve the accuracy of an integrated navigation system [
7]. The Kalman filter (KF) is a well-known method for integrated navigation applications; see, for example, [
11]. The traditional Kalman filter can be applied to linear systems. Most existing AUV positioning methods comprise improved Kalman filter (KF)-based navigation algorithms combined with measurement data from underwater navigation sensors. The model of a joint AUV positioning system is often nonlinear. Therefore, the extended Kalman filter (EKF) [
28,
29,
30] and the uncentered Kalman filter (UKF) [
31,
32] are commonly used for state estimation. The accuracy of both EKF and UKF is affected by various factors, such as filter model and noise characteristics.
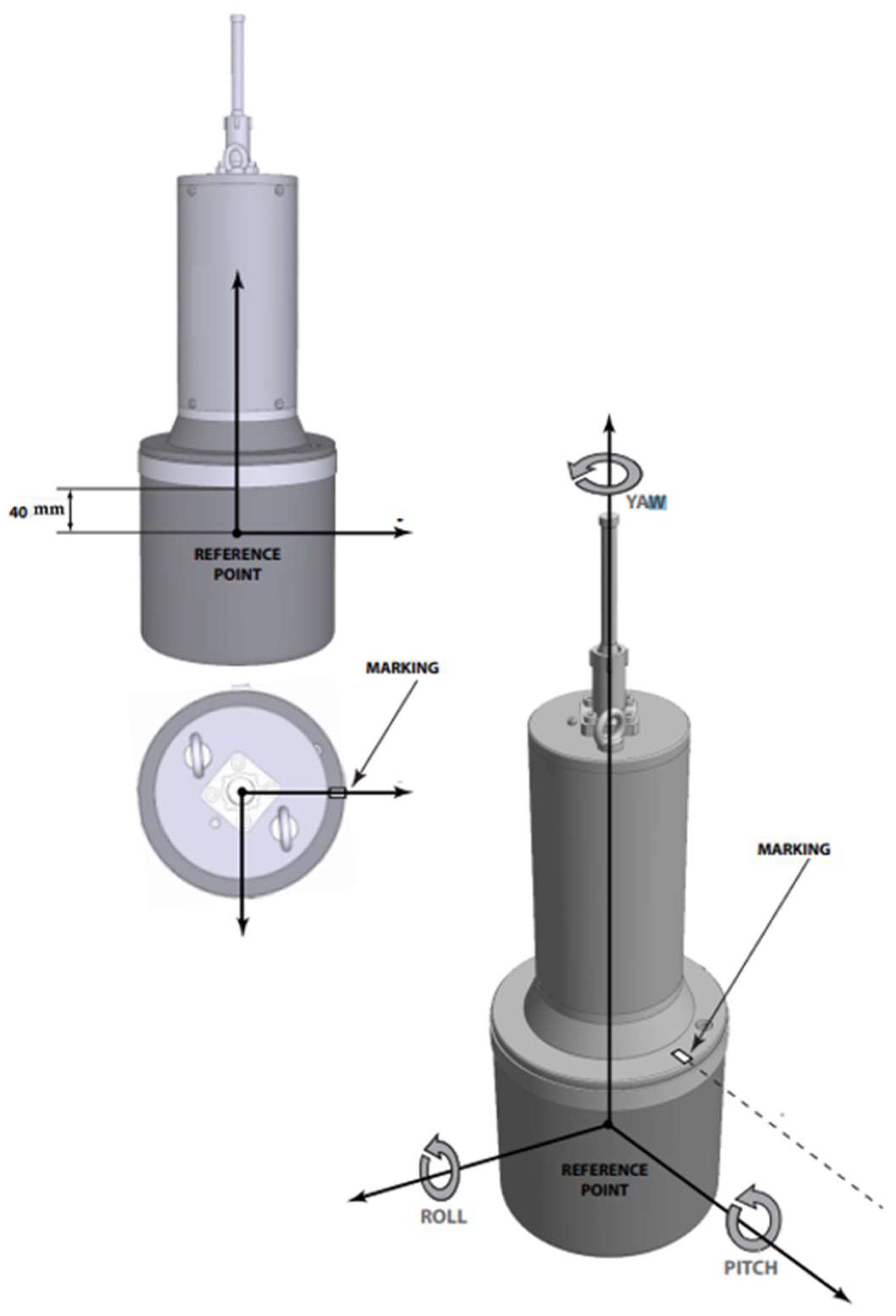
In this work, it will be acceptable to use two buoys on the surface to provide the positioning of the submersible when complexing information with inertial navigation sensors (INSs/IMUs), a Doppler velocity logger (DVL), and a pressure sensor (PS). It is assumed that the buoys do not provide bearing angle data.
The hydroacoustic transceiver arrangement was based on [
26], except for the existence of only two buoys. The studies [
33,
34] were used as a basis for mathematical modeling of the navigation system object dynamics (ANPA and buoys). Hydrodynamic parameters were determined using tabular data [
35,
36], and SDC-form [
37] was used to represent all equations of dynamics and kinematics. The expressions presented in [
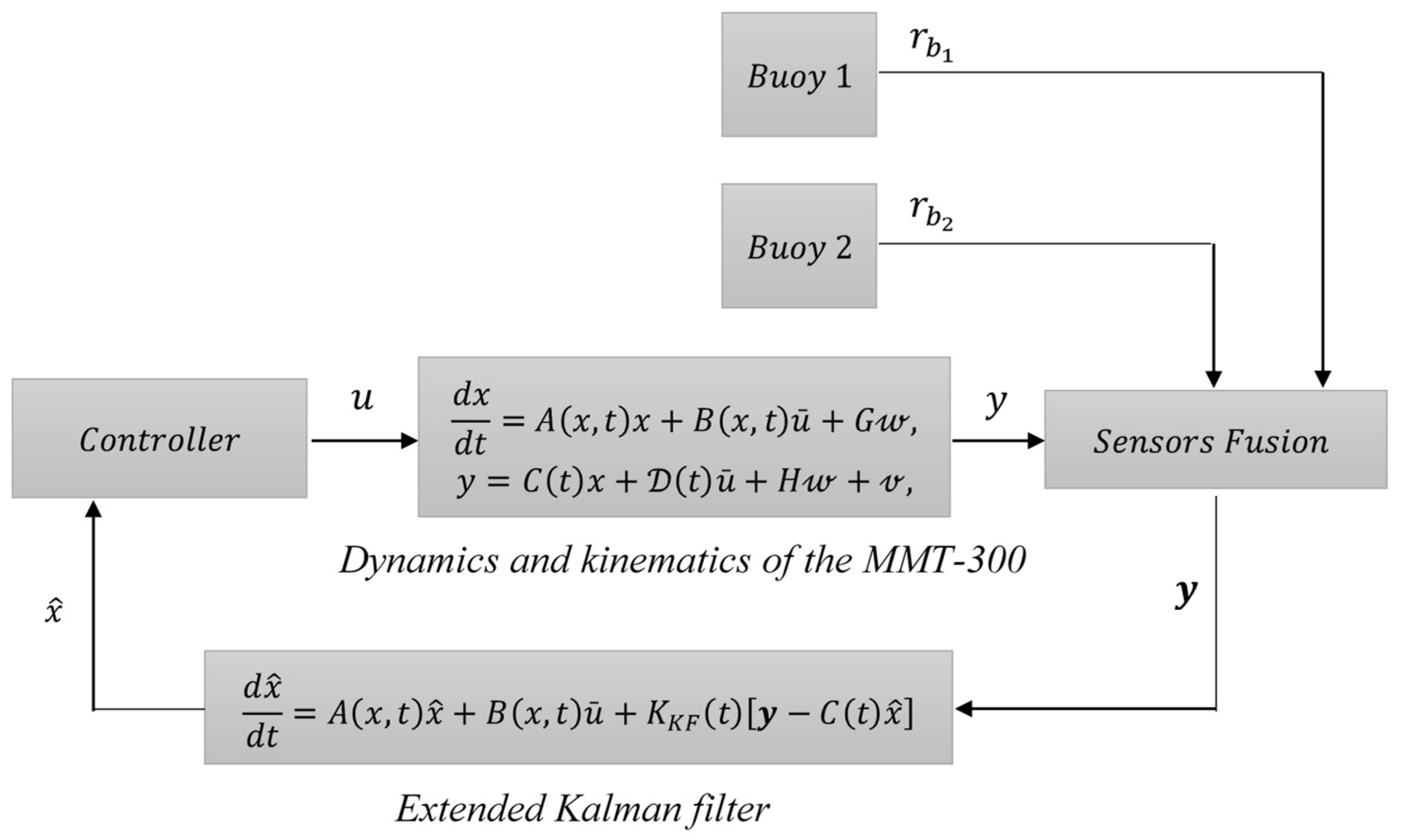
38] were used to simulate the measurements of each sensor in the navigation system. The extended Kalman filter for state filtering was formed according to the general methodology presented in a number of sources [
26,
27,
28,
29,
30]. The well-known maximum-ratio combining method was used as the considered method of sensor fusion.
Table 1 shows the overview of related work.
This paper has the following structure:
Section 2 is devoted to the used methods and means for the positioning task,
Section 3 describes the components of the proposed navigation system, and
Section 4 is devoted to the simulation modeling.
Section 5 contains conclusions on the work performed and further research directions.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}