
Modeling and Implementation of Probability-Based Underwater Docking Assessment Index

Abstract
:1. Introduction
2. Underwater Docking Assessment Design
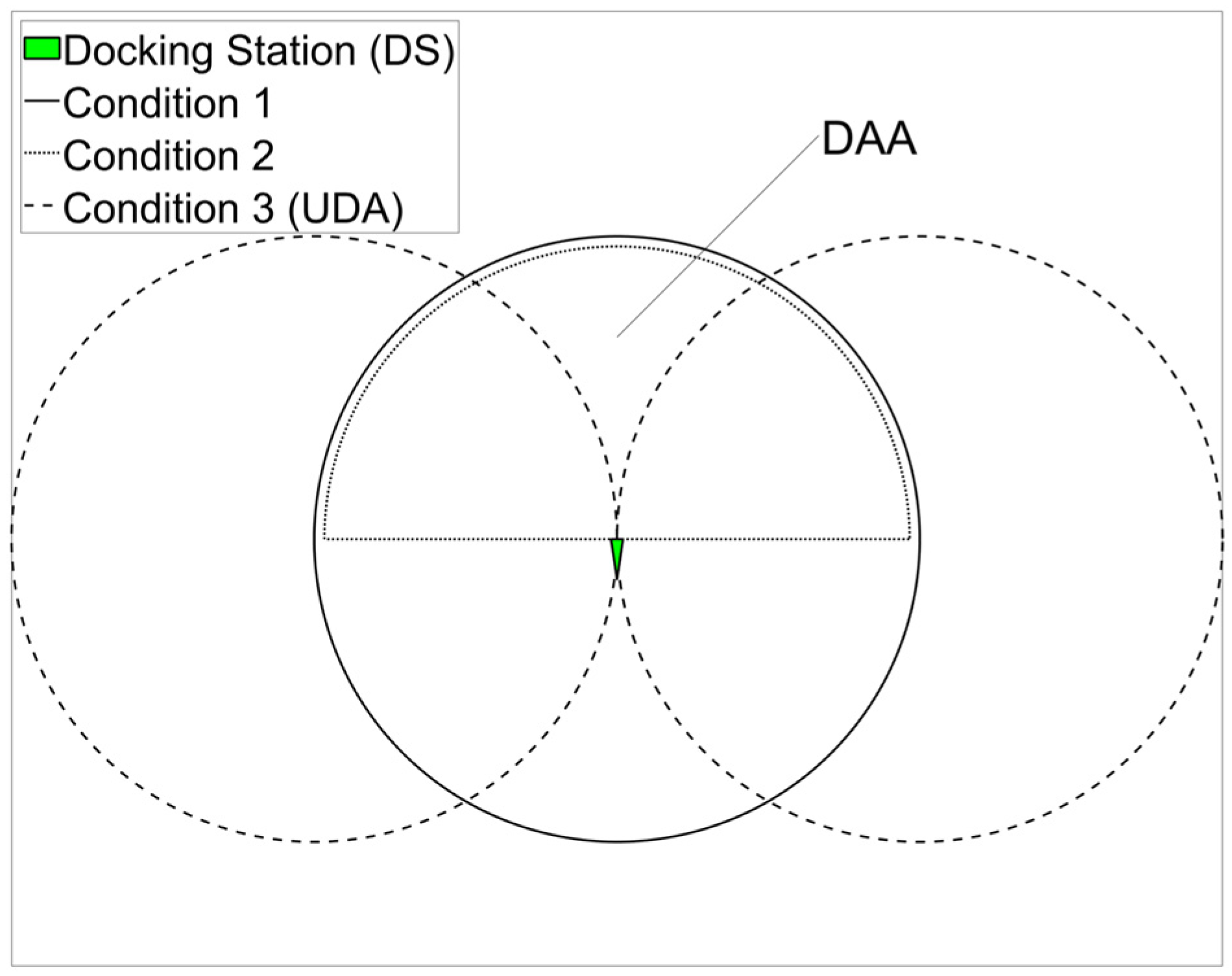
2.1. Docking Assessment Area
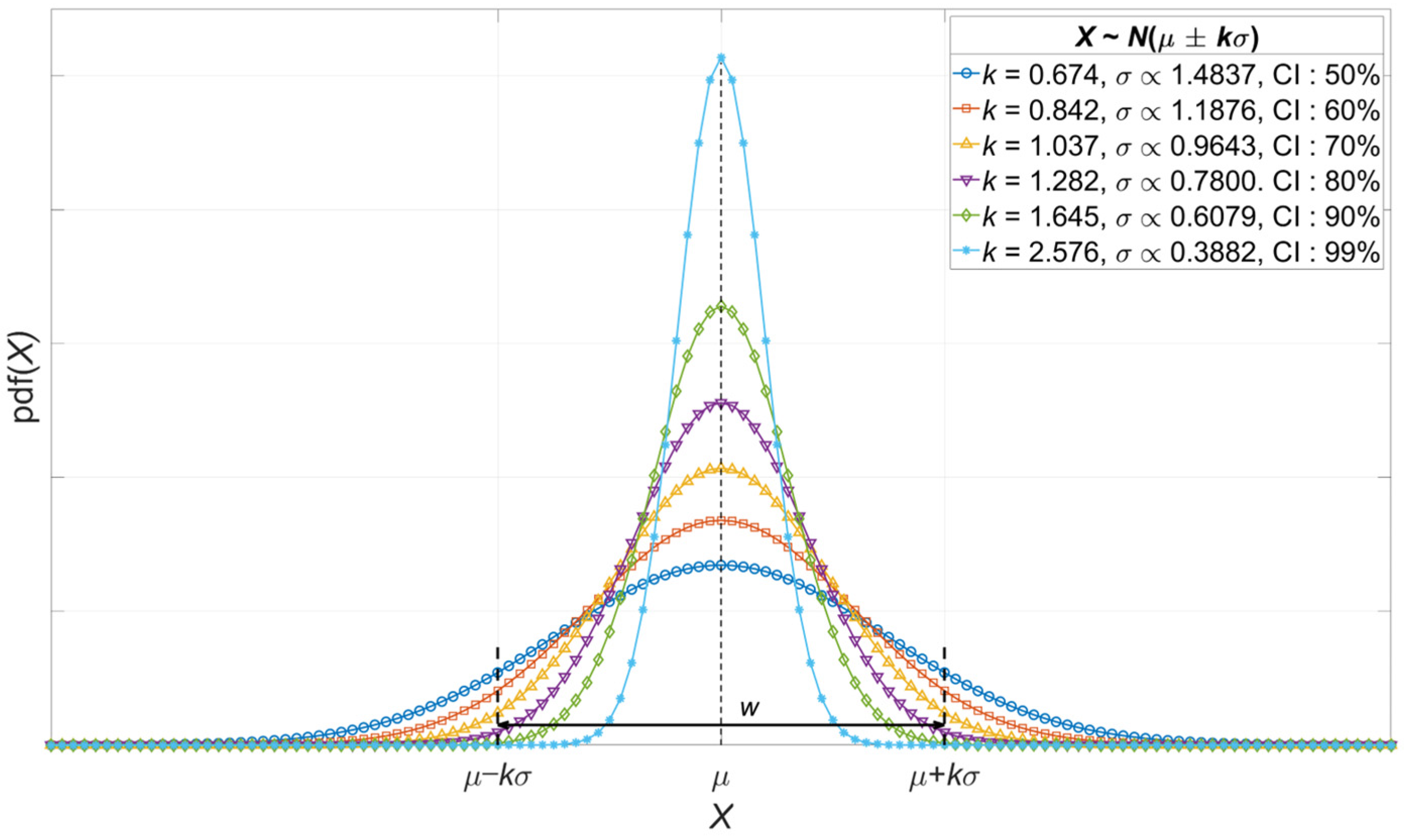
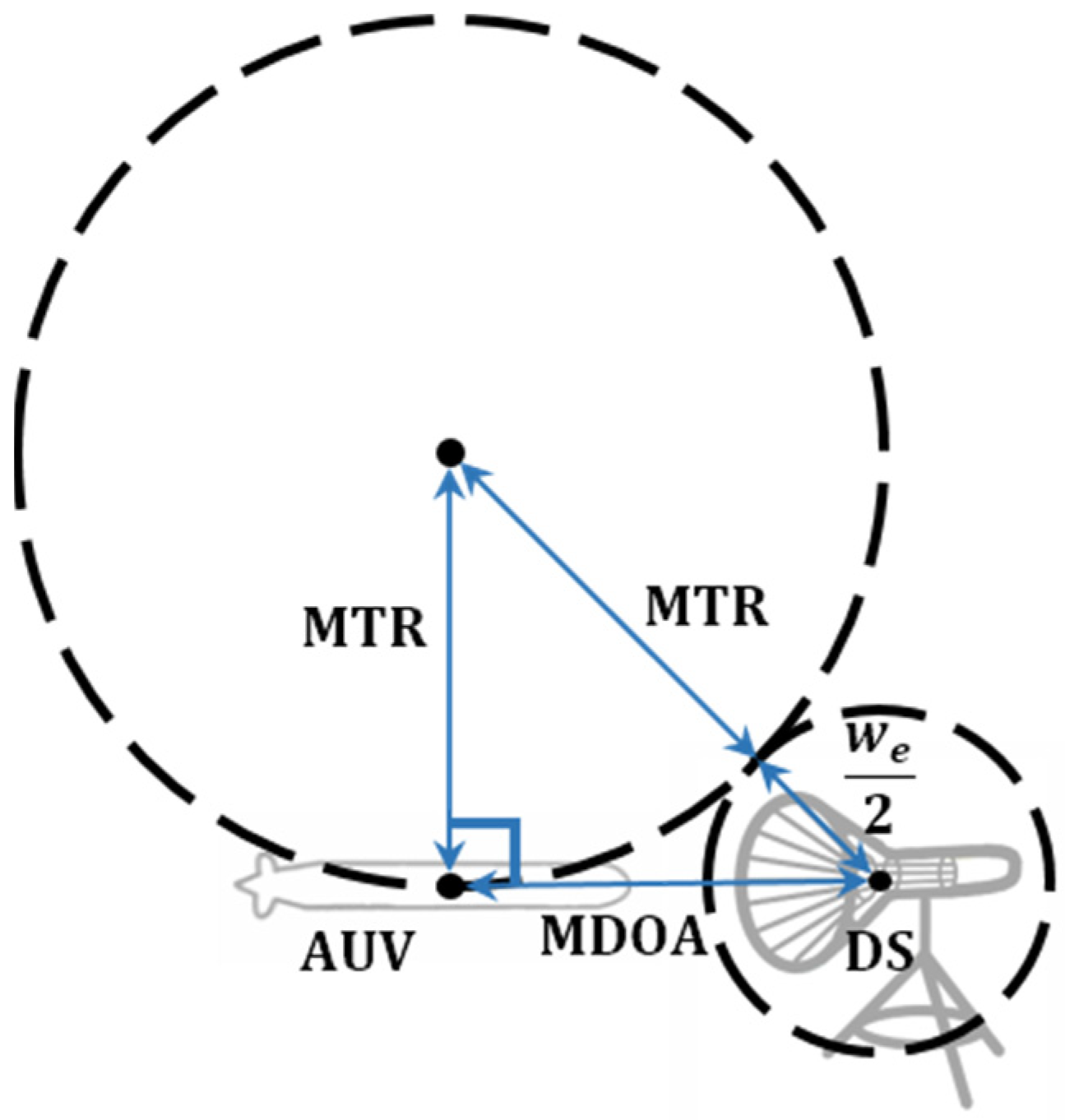
2.2. Docking Assessment Method
3. Tests and Results Analysis
3.1. Functional Test
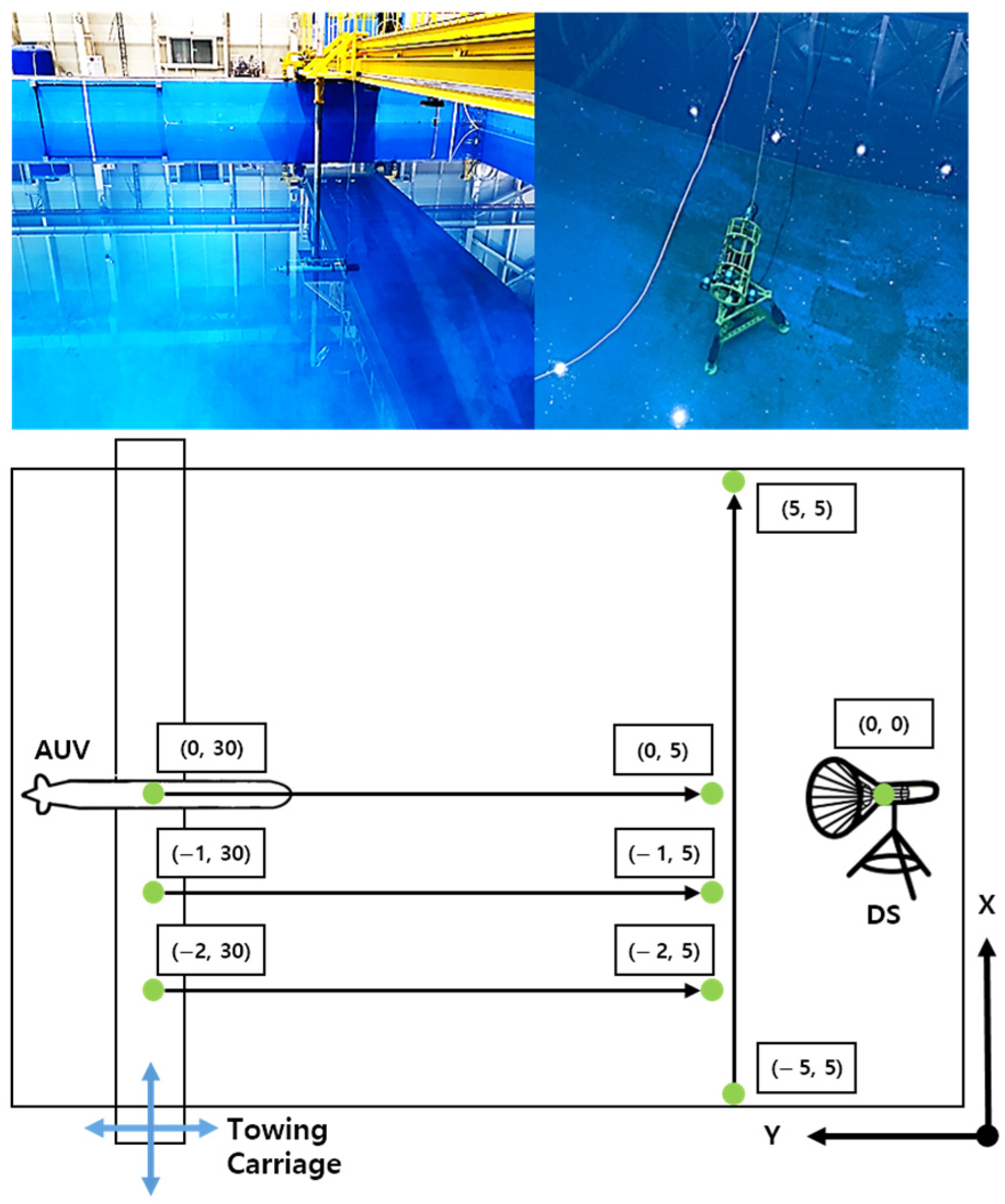
3.2. Field Test
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, D.; Wang, P.; Du, L. Path-planning technologies for autonomous underwater vehicles—A review. IEEE Access 2018, 7, 9745–9768. [Google Scholar] [CrossRef]
- Yazdani, A.M.; Sammut, K.; Yakimenko, O.; Lammas, A. A survey of underwater docking guidance systems. Robot. Auton. Syst. 2020, 124, 103382. [Google Scholar] [CrossRef]
- Yazdani, A.M.; Sammut, K.; Yakimenko, O.A.; Lammas, A. Feasibility analysis of using the hp-adaptive Radau pseudospectral method for minimum-effort collision-free docking operations of AUV. Robot. Auton. Syst. 2020, 133, 103641. [Google Scholar] [CrossRef]
- Chen, G.; Shen, Y.; Qu, N.; He, B. Path planning of AUV during diving process based on behavioral decision-making. Ocean Eng. 2021, 234, 109073. [Google Scholar] [CrossRef]
- Liu, C.; Fan, S.; Li, B.; Chen, S.; Xu, Y.; Xu, W. Path planning for autonomous underwater vehicle docking in stationary obstacle environment. In Proceedings of the Shanghai: OCEANS, Shanghai, China, 10–13 April 2016; IEEE Publications: New York, NY, USA, 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Xie, T.; Li, Y.; Jiang, Y.; Pang, S.; Wu, H. Turning circle based trajectory planning method of an underactuated AUV for the mobile docking mission. Ocean Eng. 2021, 236, 109546. [Google Scholar] [CrossRef]
- Page, B.R.; Lambert, R.; Chavez-Galaviz, J.; Mahmoudian, N. Underwater docking approach and homing to enable persistent operation. Front. Robot. AI 2021, 8, 621755. [Google Scholar] [CrossRef]
- González-García, J.; Gómez-Espinosa, A.; Cuan-Urquizo, E.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Cabello, J.A.E. Autonomous underwater vehicles: Localization, navigation, and communication for collaborative missions. Appl. Sci. 2020, 10, 1256. [Google Scholar] [CrossRef]
- Horner, D.; Mqana, M.K. Moving horizon estimation for undersea docking. In Proceedings of the Oceans 2017, Aberdeen, UK, 19–22 June 2017; IEEE Publications: New York, NY, USA, 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Ghosh, S.; Ray, R.; Vadali, S.R.K.; Shome, S.N.; Nandy, S. Reliable pose estimation of underwater dock using single camera: A scene invariant approach. Mach. Vis. Appl. 2016, 27, 221–236. [Google Scholar] [CrossRef]
- Fan, S.; Liu, C.; Li, B.; Xu, Y.; Xu, W. AUV docking based on USBL navigation and vision guidance. J. Mar. Sci. Technol. 2019, 24, 673–685. [Google Scholar] [CrossRef]
- Boyer, F.; Lebastard, V.; Chevallereau, C.; Mintchev, S.; Stefanini, C. Underwater navigation based on passive electric sense: New perspectives for underwater docking. Int. J. Robot. Res. 2015, 34, 1228–1250. [Google Scholar] [CrossRef]
- Park, J.-Y.; Jun, B.-H.; Lee, P.-M.; Lim, Y.-K.; Oh, J. Docking problem and guidance laws considering drift for an underactuated AUV. In Proceedings of the Spain: OCEANS, Santander, Spain, 6–9 June 2011; IEEE Publications: New York, NY, USA, 2011; pp. 1–7. [Google Scholar] [CrossRef]
- Sans-Muntadas, A.; Pettersen, K.Y.; Brekke, E.; Henriksen, V.F. A hybrid approach to underwater docking of AUVs with cross-current. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; IEEE Publications: New York, NY, USA, 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Fan, S.; Li, B.; Xu, W.; Xu, Y. Impact of current disturbances on AUV docking: Model-based motion prediction and countering approaches. IEEE J. Ocean. Eng. 2017, 43, 888–904. [Google Scholar] [CrossRef]
- Li, B.; Xu, Y.; Fan, S.; Xu, W. Underwater docking of an under-actuated autonomous underwater vehicle: System design and control implementation. Front. Inf. Technol. Electron. Eng. 2018, 19, 1024–1041. [Google Scholar] [CrossRef]
- Wu, L.; Li, Y.; Su, S.; Yan, P.; Qin, Y. Hydrodynamic analysis of AUV underwater docking with a cone-shaped dock under ocean currents. Ocean Eng. 2014, 85, 110–126. [Google Scholar] [CrossRef]
- Teo, K.; An, E.; Beaujean, P.-P.J. A robust fuzzy autonomous underwater vehicle (AUV) docking approach for unknown current disturbances. IEEE J. Ocean. Eng. 2012, 37, 143–155. [Google Scholar] [CrossRef]
- Esteba, J.; Cieślak, P.; Palomeras, N.; Ridao, P. Docking of non-holonomic AUVs in presence of ocean currents: A comparative survey. IEEE Access 2021, 9, 86607–86631. [Google Scholar] [CrossRef]
- Park, J.; Kim, J. Autonomous Docking of an Unmanned Surface Vehicle based on Reachability Analysis. In Proceedings of the 2020 20th International Conference on Control, Automation and Systems (ICCAS), Busan, Republic of Korea, 13–16 October 2020; pp. 962–966. [Google Scholar] [CrossRef]
- Cho, G.R.; Li, J.-H.; Park, D.; Jung, J.H. Robust trajectory tracking of autonomous underwater vehicles using back-stepping control and time delay estimation. Ocean Eng. 2020, 201, 107131. [Google Scholar] [CrossRef]
- Zhang, T.; Li, D.; Yang, C. Study on impact process of AUV underwater docking with a cone-shaped dock. Ocean Eng. 2017, 130, 176–187. [Google Scholar] [CrossRef]
- Sans-Muntadas, A.; Brekke, E.F.; Hegrenaes, Ø.; Pettersen, K.Y. Navigation and probability assessment for successful AUV docking using USBL. IFAC-PapersOnLine 2015, 48, 204–209. [Google Scholar] [CrossRef]
- Vu, M.T.; Choi, H.S.; Nhat, T.Q.M.; Nguyen, N.D.; Lee, S.D.; Le, T.H.; Sur, J. Docking assessment algorithm for autonomous underwater vehicles. Appl. Ocean Res. 2020, 100, 102180. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CI Level | ASP | AEP | ||||
|---|---|---|---|---|---|---|
| 50% | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 |
| 60% | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 |
| 70% | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 |
| 80% | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 |
| 90% | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 |
| 99% | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 |
| CI Level | ASP | AEP | ||||
|---|---|---|---|---|---|---|
| 50% | 99.90 | 99.85 | 99.88 | 89.31 | 80.57 | 84.83 |
| 60% | 99.85 | 99.77 | 99.81 | 83.32 | 71.38 | 77.35 |
| 70% | 99.77 | 99.65 | 99.71 | 76.52 | 59.97 | 67.74 |
| 80% | 99.65 | 99.46 | 99.55 | 66.43 | 45.77 | 55.14 |
| 90% | 99.42 | 99.11 | 99.27 | 50.99 | 27.61 | 37.52 |
| 99% | 98.59 | 97.86 | 98.22 | 19.40 | 4.35 | 9.19 |
| CI Level | ASP | AEP | ||||
|---|---|---|---|---|---|---|
| 50% | 99.46 | 99.37 | 99.42 | 84.69 | 80.48 | 82.56 |
| 60% | 99.17 | 99.02 | 99.09 | 77.15 | 71.25 | 74.14 |
| 70% | 98.74 | 98.51 | 98.62 | 67.47 | 59.80 | 63.52 |
| 80% | 98.08 | 97.74 | 97.91 | 54.81 | 45.58 | 49.98 |
| 90% | 96.85 | 96.30 | 96.58 | 37.16 | 27.42 | 31.92 |
| 99% | 92.51 | 91.23 | 91.86 | 8.97 | 4.28 | 6.19 |
| Trial | CI Level | |||||
|---|---|---|---|---|---|---|
| 80% | 90% | 99% | ||||
| ASP (%) | AEP (%) | ASP (%) | AEP (%) | ASP (%) | AEP (%) | |
| 1 | 99.9960 | 100.00 | 99.9934 | 100.00 | 99.9839 | 100.00 |
| 2 | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 |
| 3 | 99.9991 | 100.00 | 99.9985 | 100.00 | 99.9963 | 100.00 |
| 4 | 99.9838 | 100.00 | 99.9734 | 100.00 | 99.9352 | 100.00 |
| 5 | 99.9876 | 100.00 | 99.9795 | 100.00 | 99.9501 | 100.00 |
| 6 | 99.9881 | 100.00 | 99.9805 | 100.00 | 99.9524 | 100.00 |
| 7 | 99.9612 | 100.00 | 99.9361 | 100.00 | 99.8444 | 100.00 |
| 8 | 99.9753 | 100.00 | 99.9593 | 100.00 | 99.9009 | 100.00 |
| 9 | 99.9926 | 100.00 | 99.9878 | 100.00 | 99.9704 | 100.00 |
| 10 | 99.9922 | 100.00 | 99.9871 | 100.00 | 99.9685 | 100.00 |
| Avg. | 99.9876 | 100.00 | 99.9796 | 100.00 | 99.9502 | 100.00 |
| Trial | CI Level | |||||
|---|---|---|---|---|---|---|
| 80% | 90% | 99% | ||||
| ASP (%) | AEP (%) | ASP (%) | AEP (%) | ASP (%) | AEP (%) | |
| 1 | 100.00 | 85.3578 | 100.00 | 77.0537 | 100.00 | 53.0064 |
| 2 | 99.9961 | 98.7728 | 99.9936 | 97.9874 | 99.9844 | 95.1697 |
| 3 | 100.00 | 96.1025 | 100.00 | 93.6641 | 100.00 | 85.2663 |
| 4 | 99.9986 | 91.8285 | 99.9977 | 86.9047 | 99.9944 | 71.0498 |
| 5 | 100.00 | 86.1365 | 100.00 | 78.2145 | 100.00 | 54.9721 |
| 6 | 99.9942 | 88.6278 | 99.9904 | 81.9738 | 99.9767 | 61.6925 |
| 7 | 100.00 | 80.3448 | 100.00 | 69.7435 | 100.00 | 41.5854 |
| 8 | 100.00 | 82.4647 | 100.00 | 72.8010 | 100.00 | 46.1624 |
| 9 | 100.00 | 89.7582 | 100.00 | 83.7024 | 100.00 | 64.8421 |
| 10 | 99.9971 | 85.1290 | 99.9952 | 76.7139 | 99.9882 | 52.4391 |
| Avg. | 99.9986 | 88.4523 | 99.9977 | 81.8759 | 99.9944 | 62.6186 |
| Trial | CI Level | |||||
|---|---|---|---|---|---|---|
| 80% | 90% | 99% | ||||
| ASP (%) | AEP (%) | ASP (%) | AEP (%) | ASP (%) | AEP (%) | |
| 1 | 99.9980 | 92.3893 | 99.9967 | 87.7802 | 99.9920 | 72.8055 |
| 2 | 99.9981 | 99.3845 | 99.9968 | 98.9886 | 99.9922 | 97.5550 |
| 3 | 99.9995 | 98.0319 | 99.9992 | 96.7802 | 99.9981 | 92.3398 |
| 4 | 99.9912 | 95.8272 | 99.9855 | 93.2227 | 99.9648 | 84.2910 |
| 5 | 99.9938 | 92.8098 | 99.9898 | 88.4390 | 99.9750 | 74.1432 |
| 6 | 99.9912 | 94.1423 | 99.9854 | 90.5394 | 99.9646 | 78.5044 |
| 7 | 99.9806 | 89.6353 | 99.9680 | 83.5137 | 99.9222 | 64.4867 |
| 8 | 99.9876 | 90.8101 | 99.9796 | 85.3235 | 99.9504 | 67.9429 |
| 9 | 99.9963 | 94.7408 | 99.9939 | 91.4890 | 99.9852 | 80.5246 |
| 10 | 99.9946 | 92.2654 | 99.9911 | 87.5865 | 99.9784 | 72.4148 |
| Avg. | 99.9931 | 94.0037 | 99.9886 | 90.3663 | 99.9723 | 78.5008 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chon, S.-J.; Kim, J.-Y.; Choi, H.-S.; Kim, J.-H. Modeling and Implementation of Probability-Based Underwater Docking Assessment Index. J. Mar. Sci. Eng. 2023, 11, 2127. https://doi.org/10.3390/jmse11112127
Chon S-J, Kim J-Y, Choi H-S, Kim J-H. Modeling and Implementation of Probability-Based Underwater Docking Assessment Index. Journal of Marine Science and Engineering. 2023; 11(11):2127. https://doi.org/10.3390/jmse11112127
Chicago/Turabian StyleChon, Seung-Jae, Joon-Young Kim, Hyeung-Sik Choi, and Jong-Hwa Kim. 2023. "Modeling and Implementation of Probability-Based Underwater Docking Assessment Index" Journal of Marine Science and Engineering 11, no. 11: 2127. https://doi.org/10.3390/jmse11112127