1. Introduction
In recent years, with the gradual imbalance of the supply and demand of traditional energy and the increasing global warming effects, many countries have focused on renewable energy and the increased development and utilization of renewable energy technologies. For example, China’s “dual carbon” strategy implies the gradual withdrawal of traditional energy systems and their replacement with new energy systems. Compared with traditional fossil energy, wind energy, as one of the renewable energies with the most promising development and utilization, has the advantages of sustainability, pollution-free, and large storage capacity.
According to relevant statistics, the current wind power generation is mainly based on onshore wind turbines [
1]. However, with the expansion of the wind power industry, onshore wind farms have problems such as a shortage of available land resources, fewer wind resources, and they are easily disturbed by weather conditions. In contrast, the power generation efficiency of offshore wind farms, especially those located in the deep sea, is 20–40% higher than that of onshore wind farms. Offshore wind turbines have the advantages of not occupying land resources, abundant wind resources, and stable power generation efficiency [
2]. Because of the high cost and technical difficulty of building fixed-bottom wind turbines in the deep ocean, floating offshore wind turbines (FOWTs) are increasing year by year. More and more countries take FOWT technology to be the focus of future wind energy technology development [
3].
The FOWTs are located in the ocean environment, and they are often affected by wind, waves, current, and other external loads. Due to these environmental loads, the reliability of FOWTs is often threatened. The working sites of FOWTs are located in the deep sea, and maintenance is difficult and expensive. Therefore, controlling the FOWT vibration under harsh conditions and improving the vibration resistance of the wind turbine are very important research topics [
4,
5,
6,
7].
One way to reduce the vibration amplitude of the floating wind turbine platform is to optimize the mooring system [
4,
5,
8,
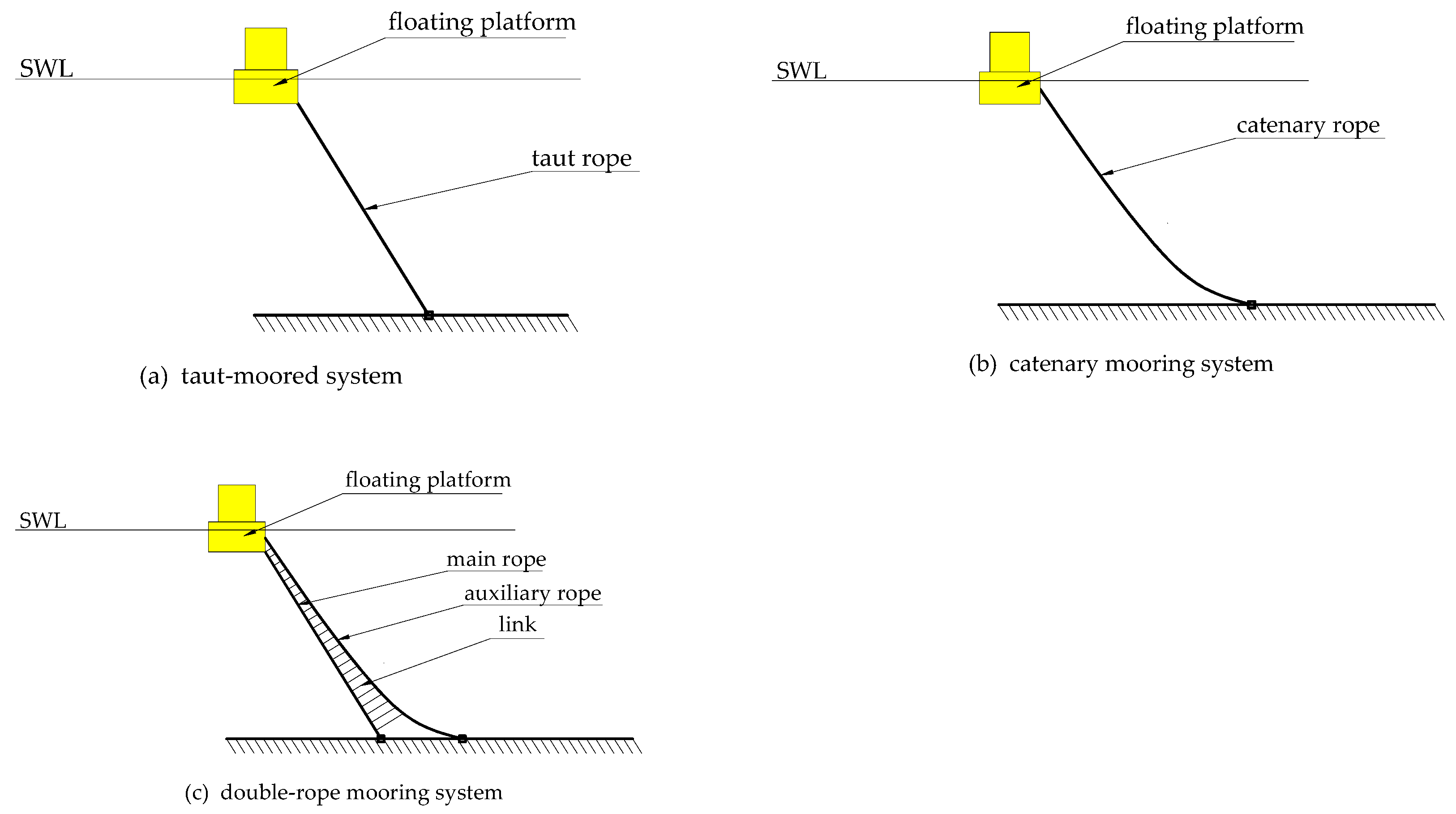
9]. Currently, most of the floating wind turbine mooring systems adopt a taut leg mooring system or catenary mooring system. The taut leg mooring system has good vibration reduction performance, but its fatigue resistance is poor because the mooring line is under tension at all times [
10]. On the contrary, the catenary mooring system has good fatigue resistance but poor vibration reduction performance because the line is sagging, and it provides less tensile stiffness. In order to meet both vibration reduction performance and fatigue resistance performance, the mooring system needs to be optimized by changing the form of the mooring line and the line material or the layout of the mooring lines. Because the mooring system has an important impact on the dynamic characteristics, stability performance, and economic benefit of the FOWT, more and more studies focus on the mooring system of the floating wind turbine. Liu et al. proposed a new type of three-bifurcated mooring system [
4]. Compared with the original mooring system with three mooring lines, the new mooring system has two branch mooring lines for each original mooring line, which can obtain greater overturning and torsional stiffness. The designed mooring system can reduce the wind turbine surge motion by 37.15% and 54.5% at most and the yaw motion by 30.1% and 40% at most under regular and irregular waves, respectively. Liu et al. also designed a mooring system with six mooring lines, which were divided into three groups [
5]. Two mooring lines in the same group were connected to the same fairlead, and the design also achieved good vibration reduction performance. Liu et al. proposed adding mass blocks to the mooring lines to reduce the surge motion [
8]. The results show that the wave-induced response can be effectively reduced by adding only one-tenth of the mass to the mooring line. Yuan et al. proposed a novel mooring system that can resist both pitch and horizontal motion by dividing the fairleads into two groups at different depths [
9]. The results show that the innovative mooring system can significantly reduce the pitch and surge motions of the FOWT. Therefore, the innovative design and parameter optimization of the mooring system is an effective way to reduce FOWT vibration.
Another method to reduce the vibration amplitude of the floating wind turbine is to install structural control devices, such as a tuned mass damper (TMD) and tuned liquid column dampers (TLCD). The control objects include blades, a nacelle, a tower, and a floating platform. Structural control systems have been widely used in large structures such as buildings and bridges and have achieved good damping effects. Due to the floating characteristics of the FOWT, it is difficult to realize the direct damper connection between the fixed point of the seabed and the platform, so the vibration reduction can only be achieved by ungrounded vibration absorber devices, such as the tuned mass damper (TMD). The structural vibration control system reduces the influence of external loads by reducing the vibration amplitude of the wind turbine structure, which greatly improves the reliability of the FOWTs. Many scholars have studied the application of TMDs in FOWT vibration control and have achieved good vibration reduction effects. Dinh and Basu studied the application of single and multiple TMDs in the passive vibration control of spar-type floating wind turbines [
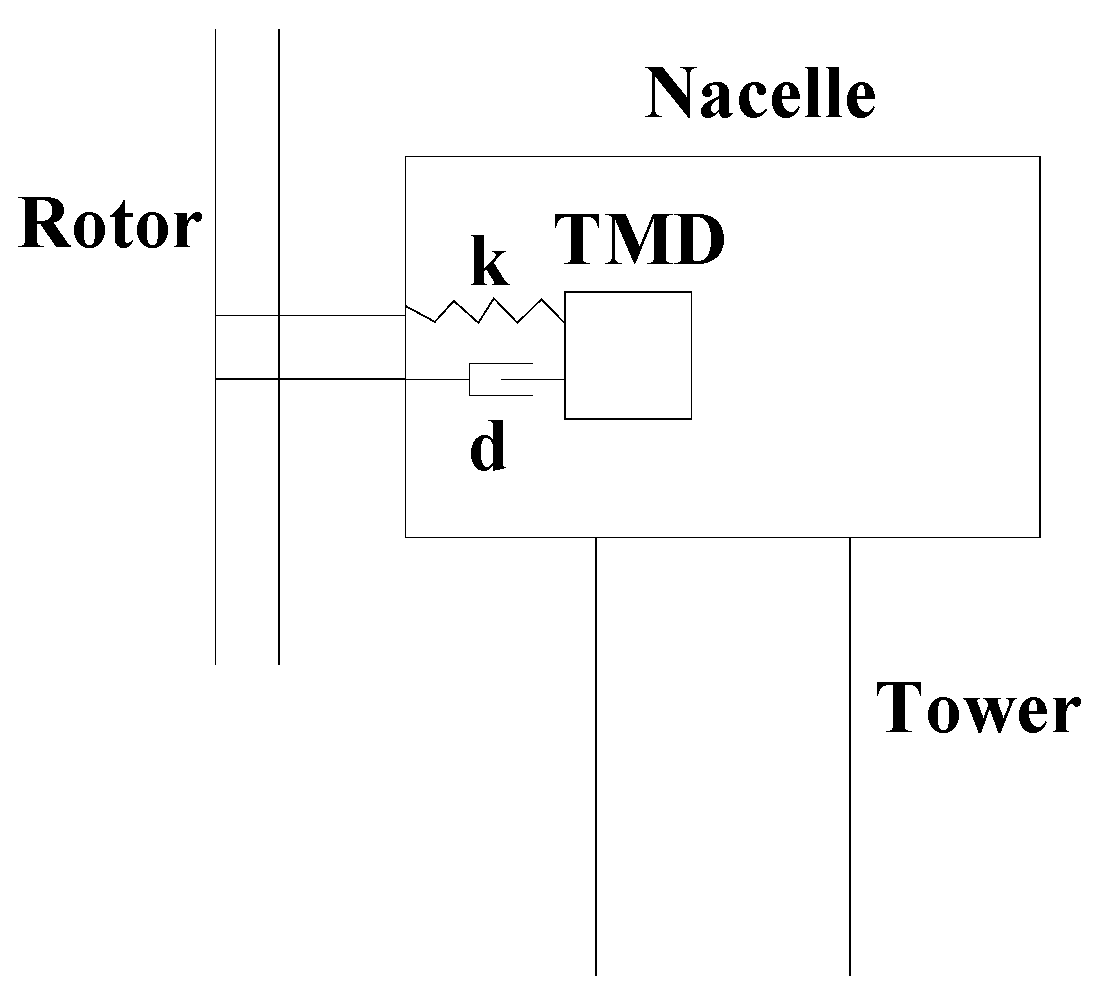
11]. In the controlled model, several horizontal sets of TMDs were placed in the spar. It has been shown that a single TMD can reduce nacelle swag displacement and spar roll by up to 40% and multiple TMDS by 50%. Li et al. studied the use of TMD in the nacelle/tower for the passive vibration control of a semi-submersible offshore wind turbine [
12]. The results show that TMD reduces structural vibration and thus extends the service life of floating wind turbines. Han et al. conducted the design optimization of multiple TMDs for semi-submersible floating wind turbines [
13]. Jahangiri and Sun proposed a three-dimensional pendulum TMD and dual linear pounding TMDs to mitigate the three-dimensional vibrations of a spar-type FOWT under wind and wave loadings [
7]. In addition to conventional TMDs, there are some special types of TMDs, such as nonlinear TMD [
14], electromagnetic shunt TMD [
15], and TMD with inerters [
16,
17], etc. These additional control measures all show better control performance. In addition, tuned liquid column dampers (TLCDs) are often used for vibration control in FOWTs. A well-designed TLCD can effectively reduce the tower side–side vibration as well as the spar roll motion [
18]. Although a well-designed TMD has been proven to have a good effect on FOWT vibration control, previous studies seldom consider that the actual travel of TMD is greatly restricted due to the limitation of installation space, which means that the stroke of TMD is limited.
Although previous researchers have conducted a lot of studies on the vibration mitigation of FOWTs, the results still have room for further improvement. First, the mooring system needs to be further innovated to meet the requirements of vibration reduction and fatigue resistance. Second, the optimal design of vibration reduction devices such as TMD on FOWTs must consider the limitation of space in order to be more realistic. To consider these two aspects, this paper has two major contributions: one is the innovation of the mooring system, the other is the consideration of the stroke limit of TMD for vibration control. Taking a 5 MW semi-submersible offshore wind turbine as the research object, this paper proposes a new double-rope mooring system to improve its performance of vibration reduction and fatigue resistance, which aims at solving the shortcomings of a single-rope system in these two aspects. Additionally, when optimizing the parameters of the TMD installed in the nacelle, space constraints are taken into account by limiting the stroke of the TMD. Through theoretical analysis, numerical simulation, and parameter analysis, the vibration-resistant performance of the proposed novel FOWT was investigated. Under different working conditions, various vibration reduction schemes were simulated and analyzed to compare their vibration reduction effects on FOWT.
The structure of the rest of this paper is as follows:
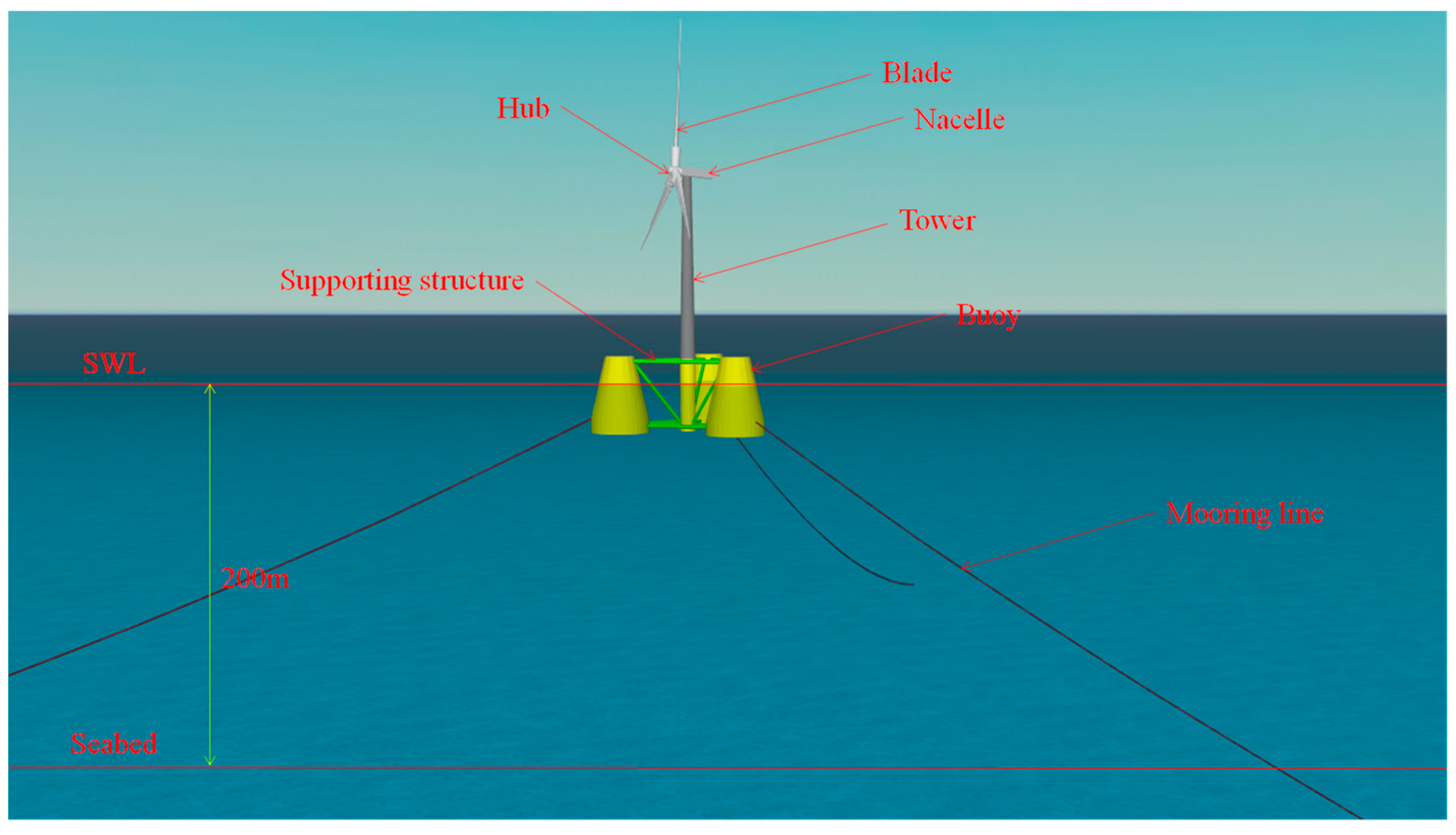
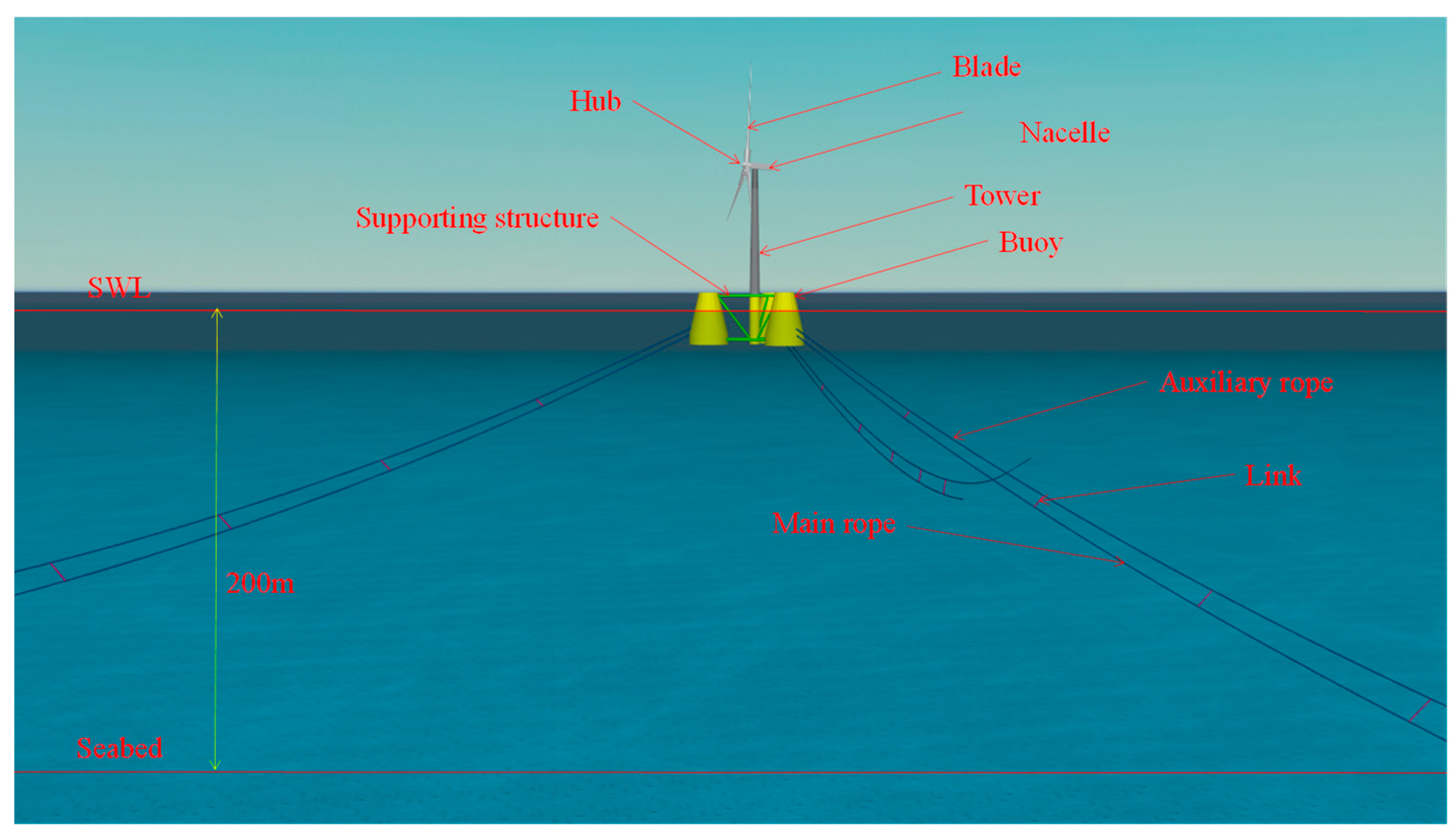
Section 2 mainly introduces the composition and modeling of the floating offshore wind turbines, including the traditional single-rope mooring system and the new double-rope mooring system proposed in this paper.
Section 3 mainly introduces the dynamic characteristics of the two mooring systems and their dynamic responses in the normal operation state and the storm self-survival state and conducts parameter analysis of the double-rope mooring system.
Section 4 mainly introduces the control theory of floating wind turbines based on TMD, the parameter optimization method considering TMD’s stroke limitation, and its influence on vibration reduction performance.
Section 5 summarizes the whole article.
5. Conclusions
The main purpose of this paper is to reduce the vibration of the floating wind turbine. In view of this, the main contributions of this paper lie in two aspects: first, a double-rope mooring system is proposed, which has better vibration and fatigue resistance compared with the original single-rope mooring system; second, considering the limitations of the installation space, a new optimization design method considering the stroke limitation of TMD is proposed to make the TMD-based vibration control more practical.
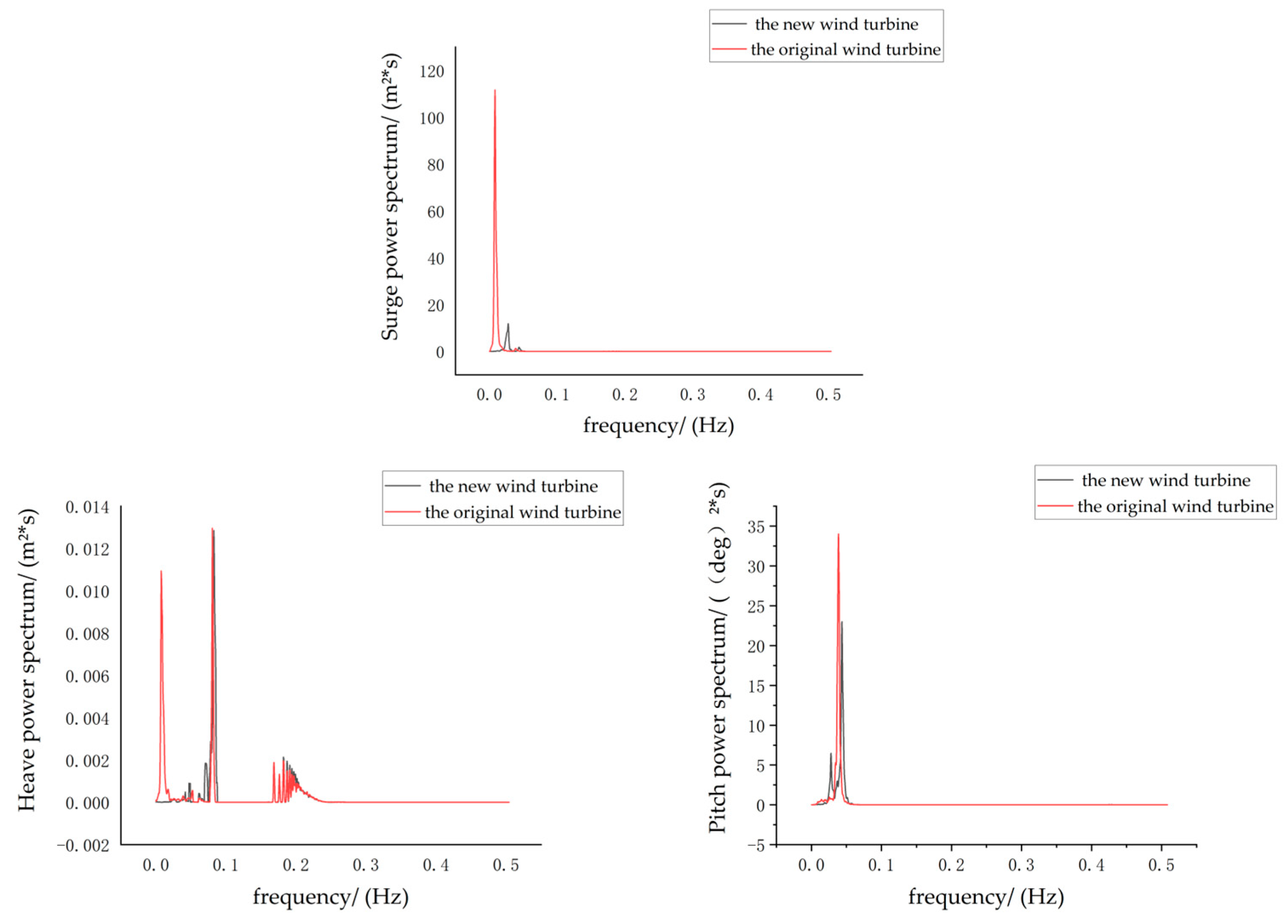
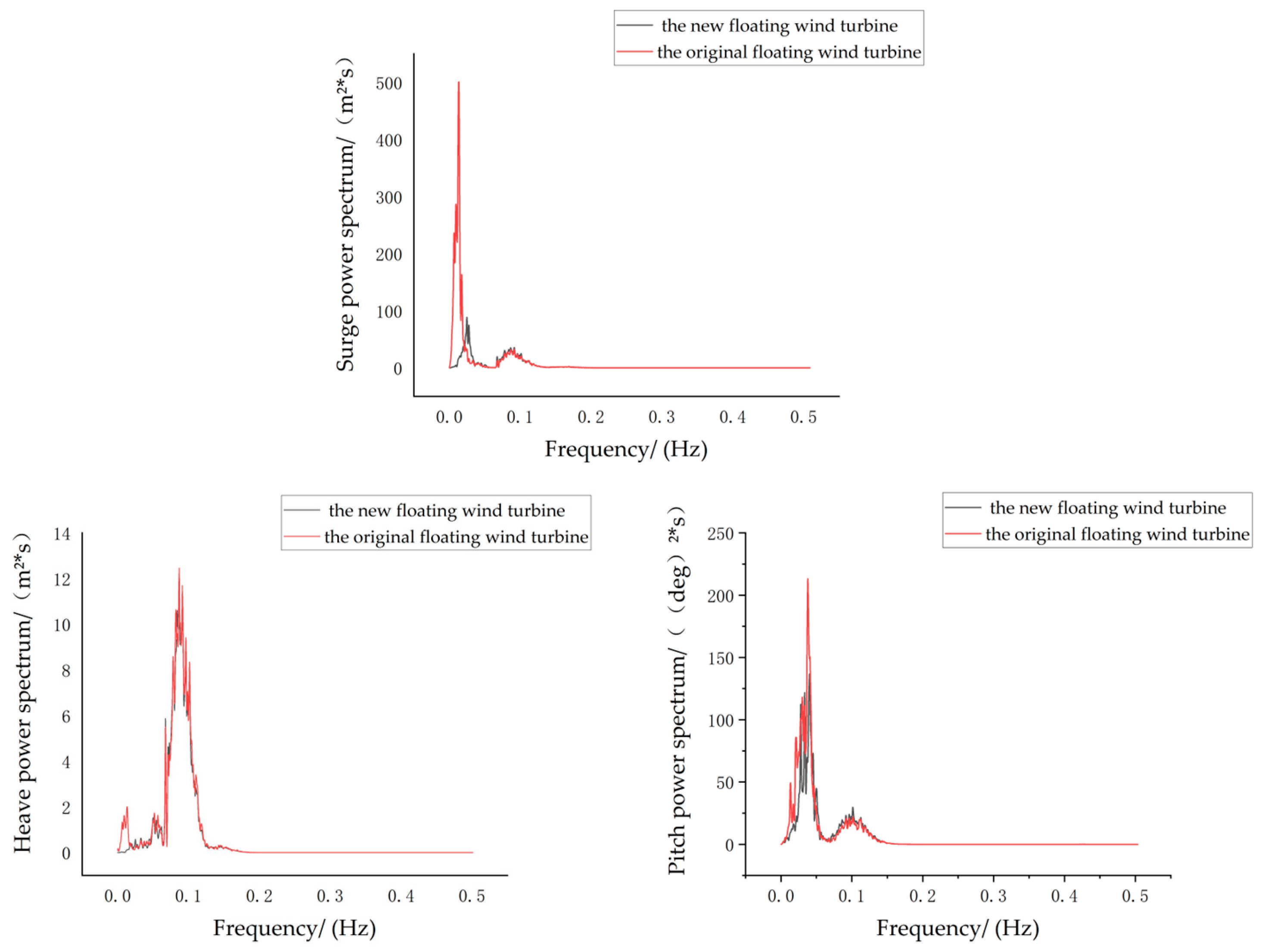
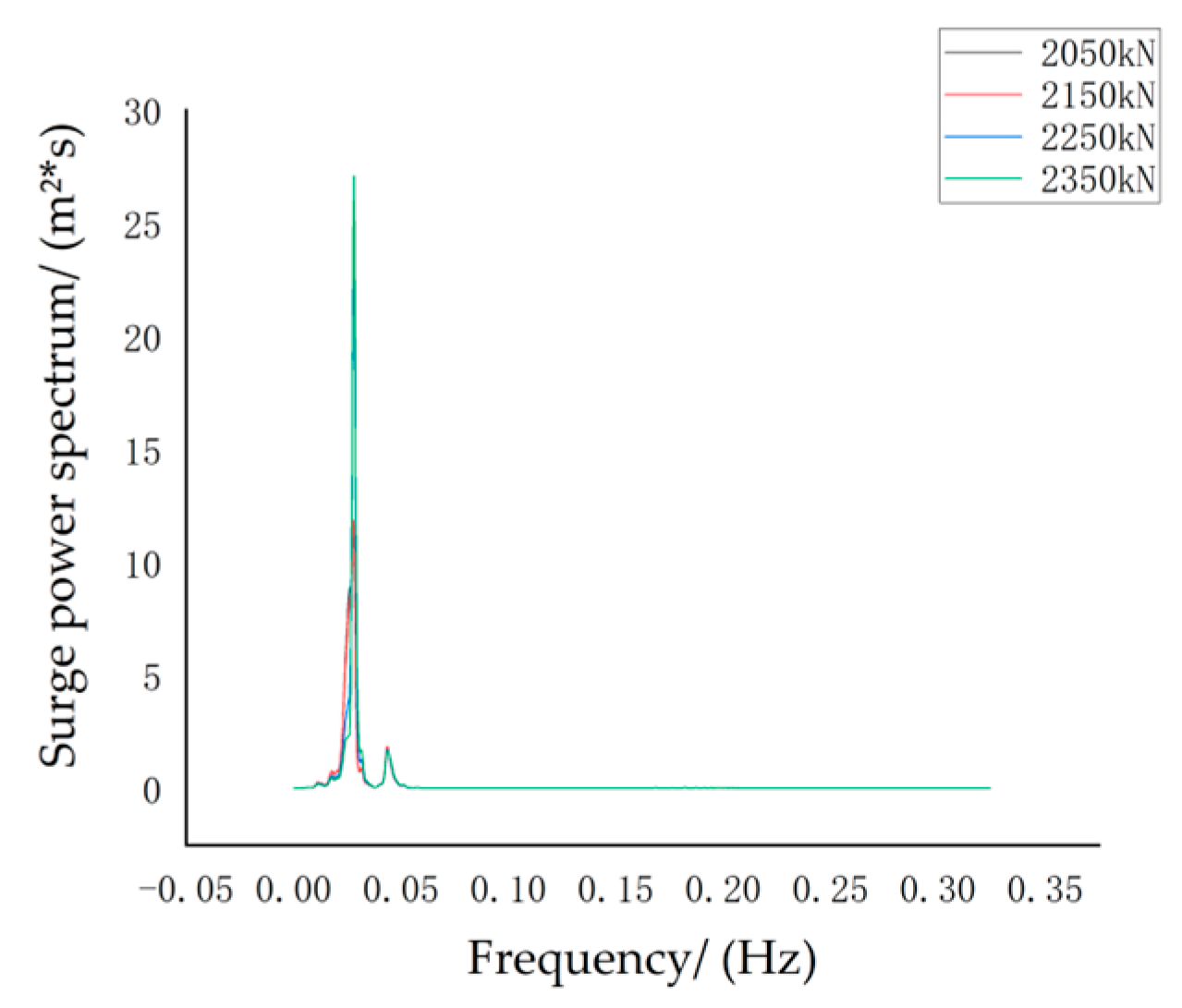
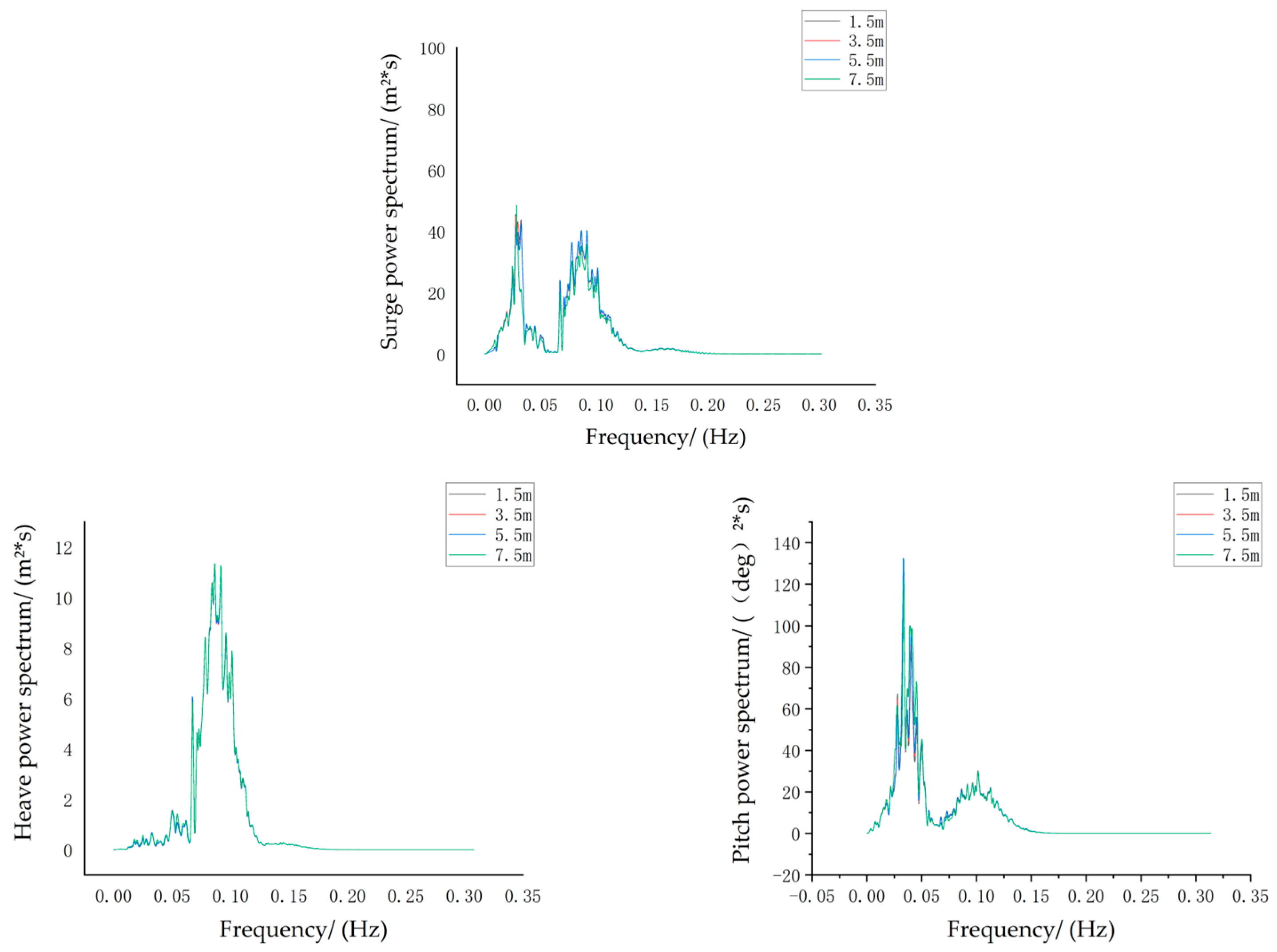
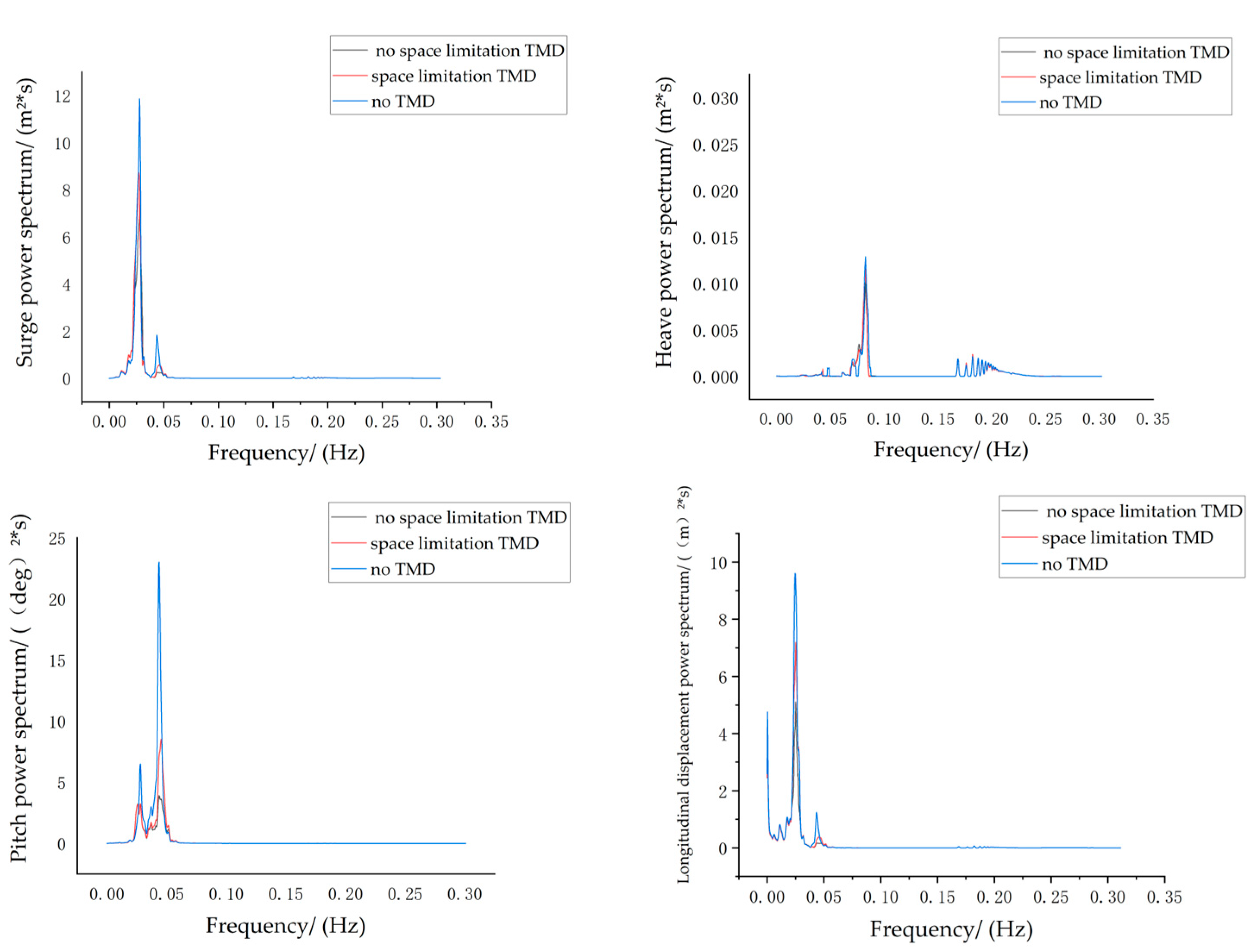
The newly proposed double-rope mooring system can overcome the shortcomings of the single-rope mooring system by considering both the vibration reduction performance and fatigue resistance performance. The new double-rope mooring system consists of the main rope, auxiliary rope, anchor device, and the links connecting the main rope and auxiliary rope. The novel double-rope mooring system was modeled in OrcaFlex, and the advantages of the double-rope mooring system compared with the original single-rope mooring system for the vibration control of the floating wind turbine platform were analyzed under normal operating conditions and storm self-existing conditions. The results show that, compared with the original single-rope mooring system, the vibration response of the floating wind turbine with a double-rope mooring system is significantly reduced. The influence of the variation in rope pretension and the position of the fairlead on the vibration response of the floating wind turbine is not obvious.
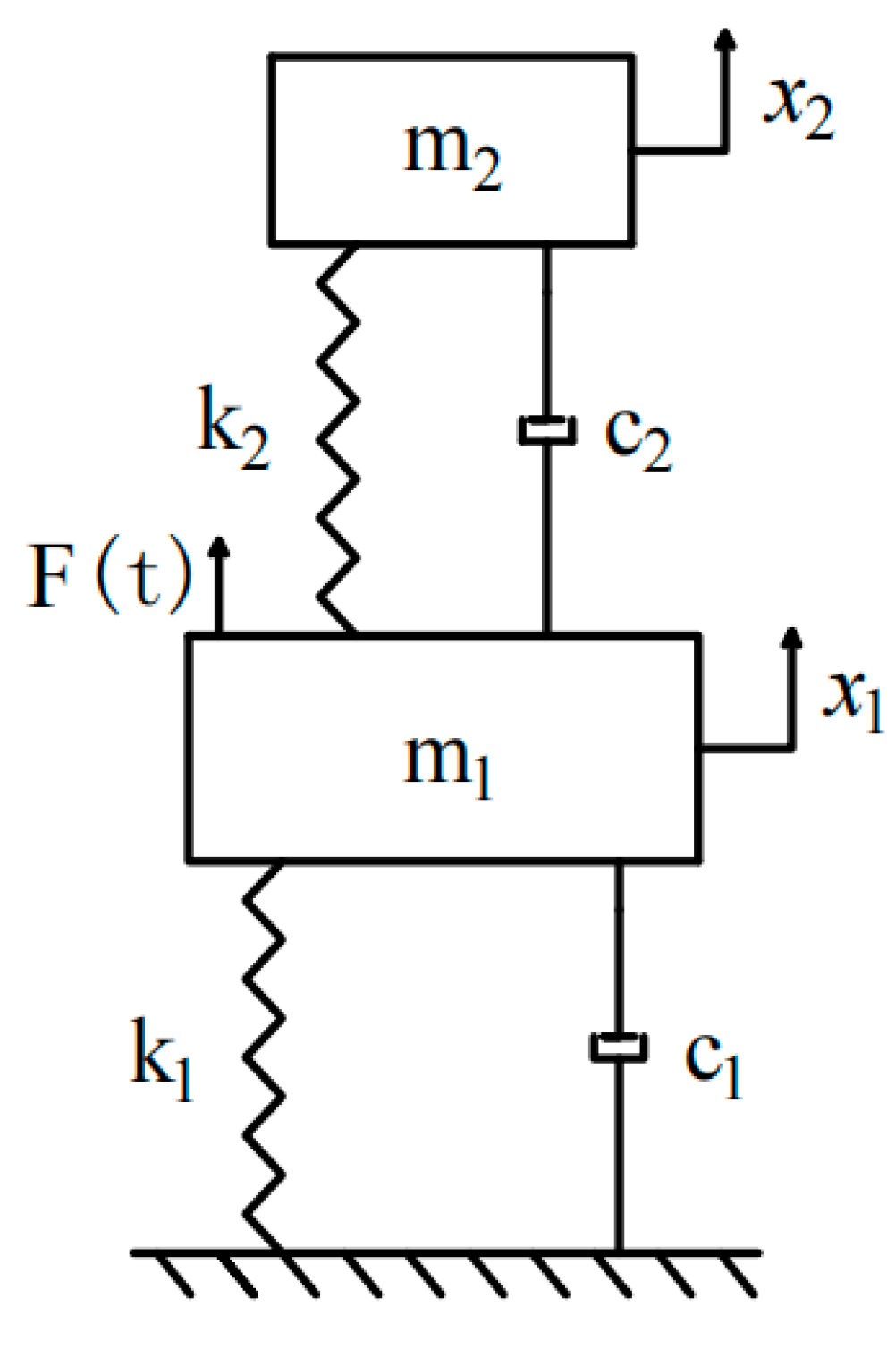
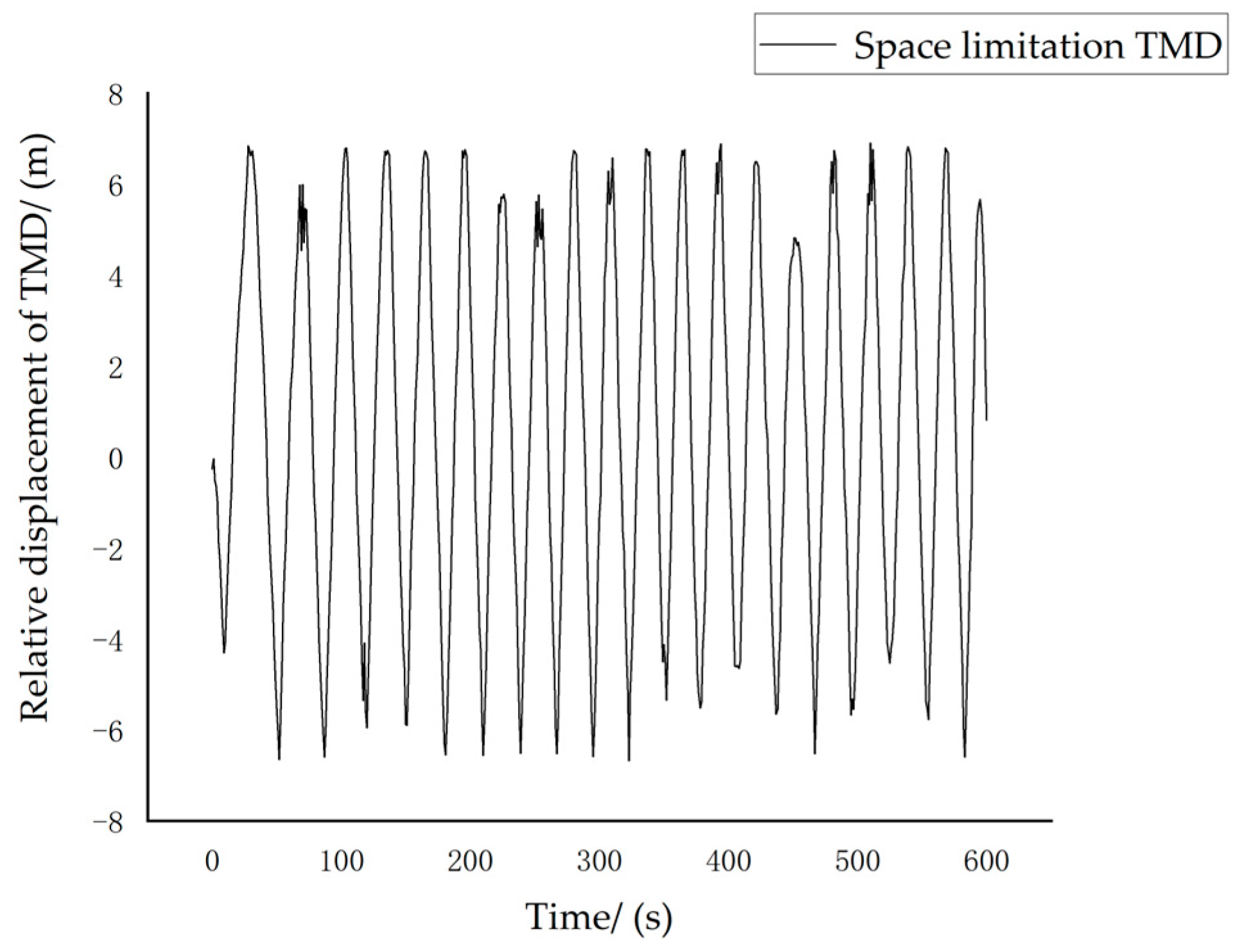
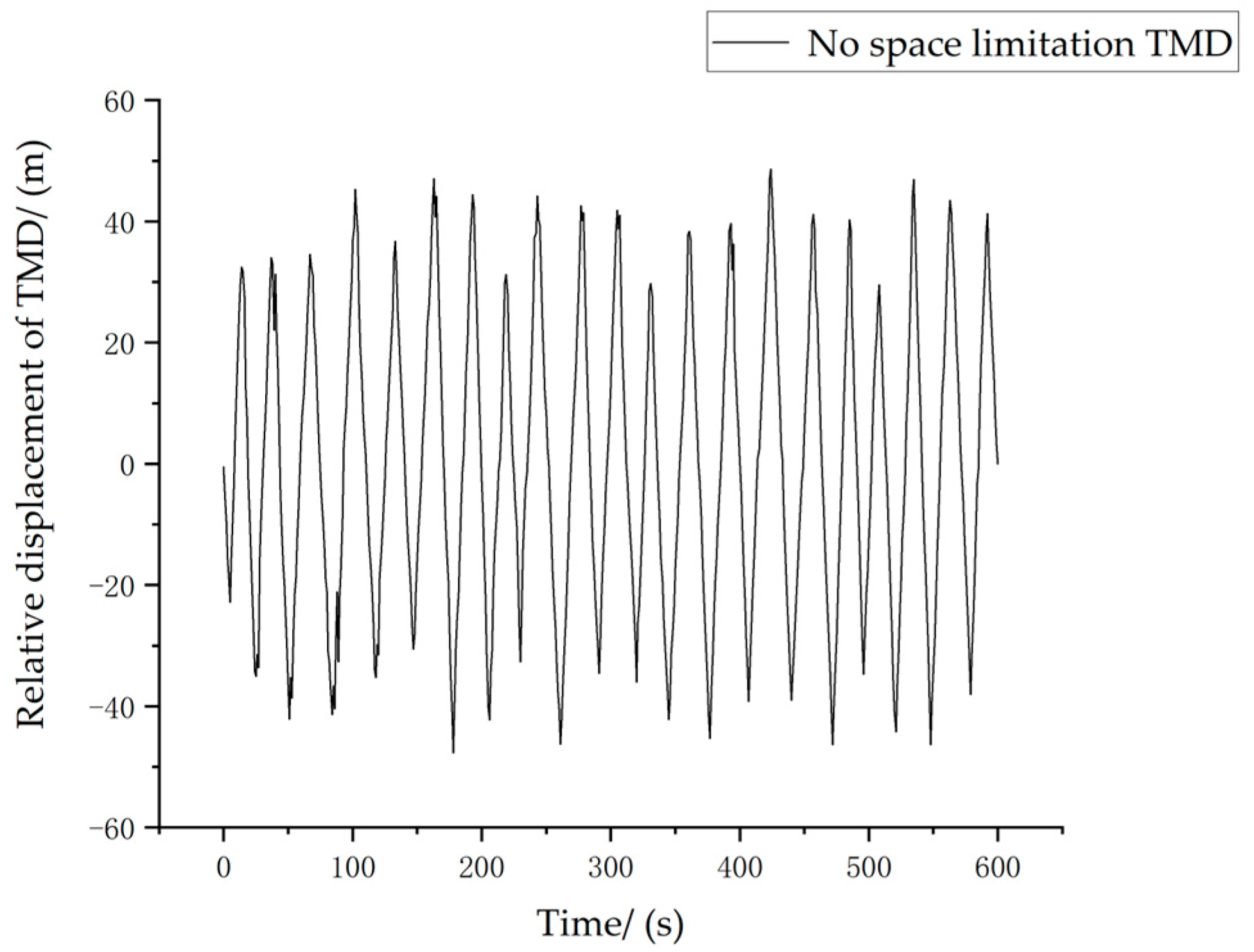
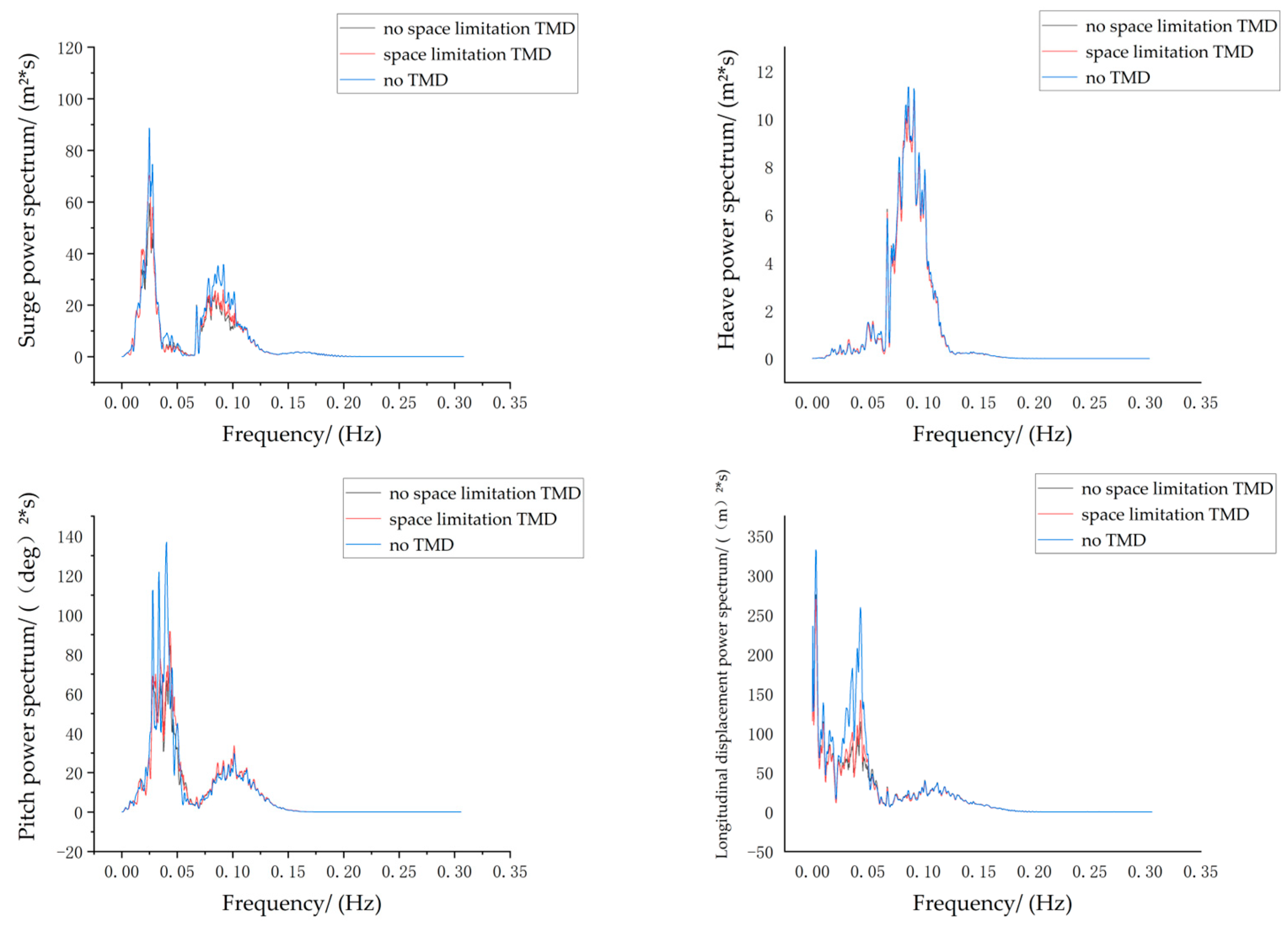
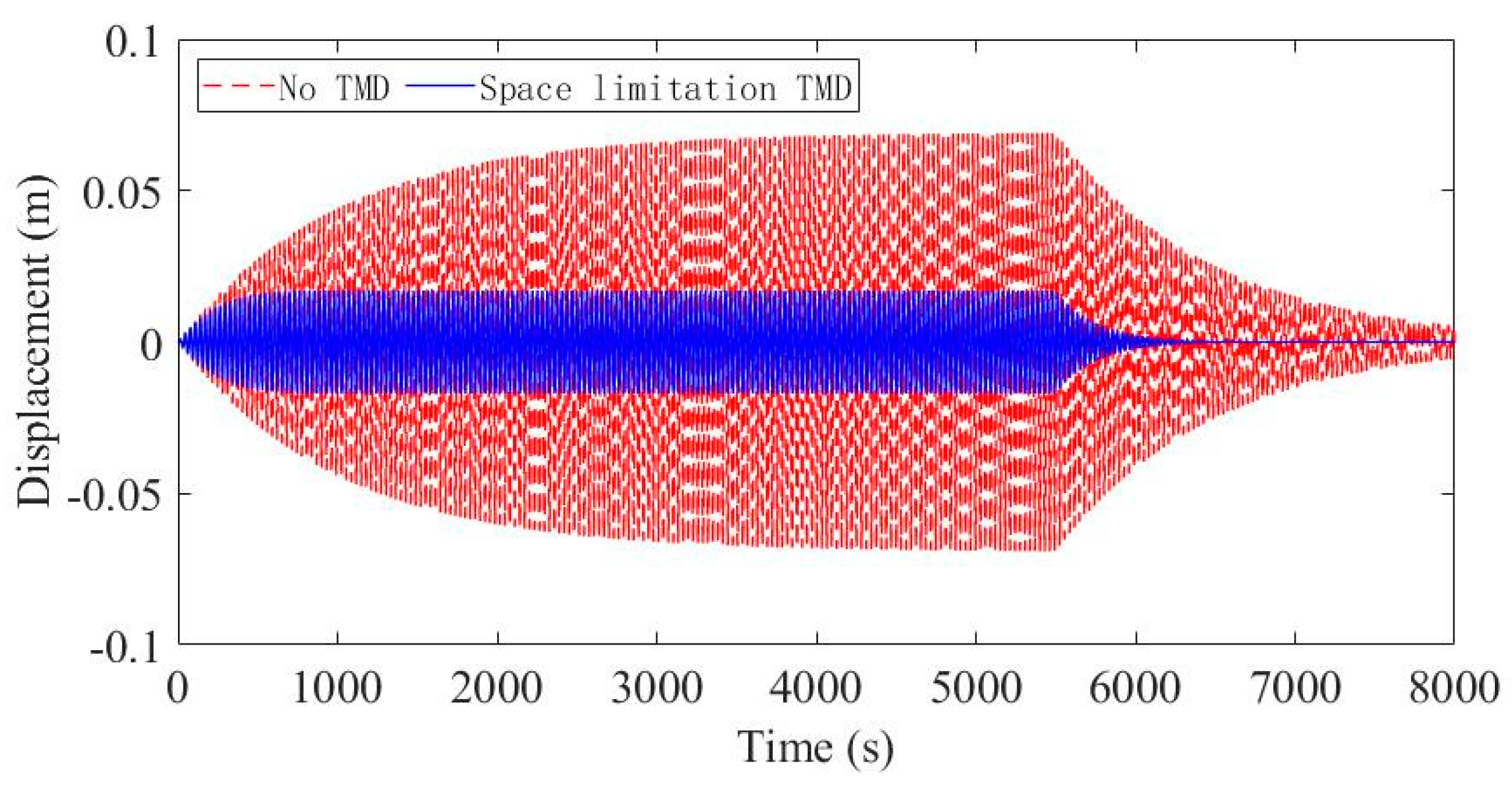
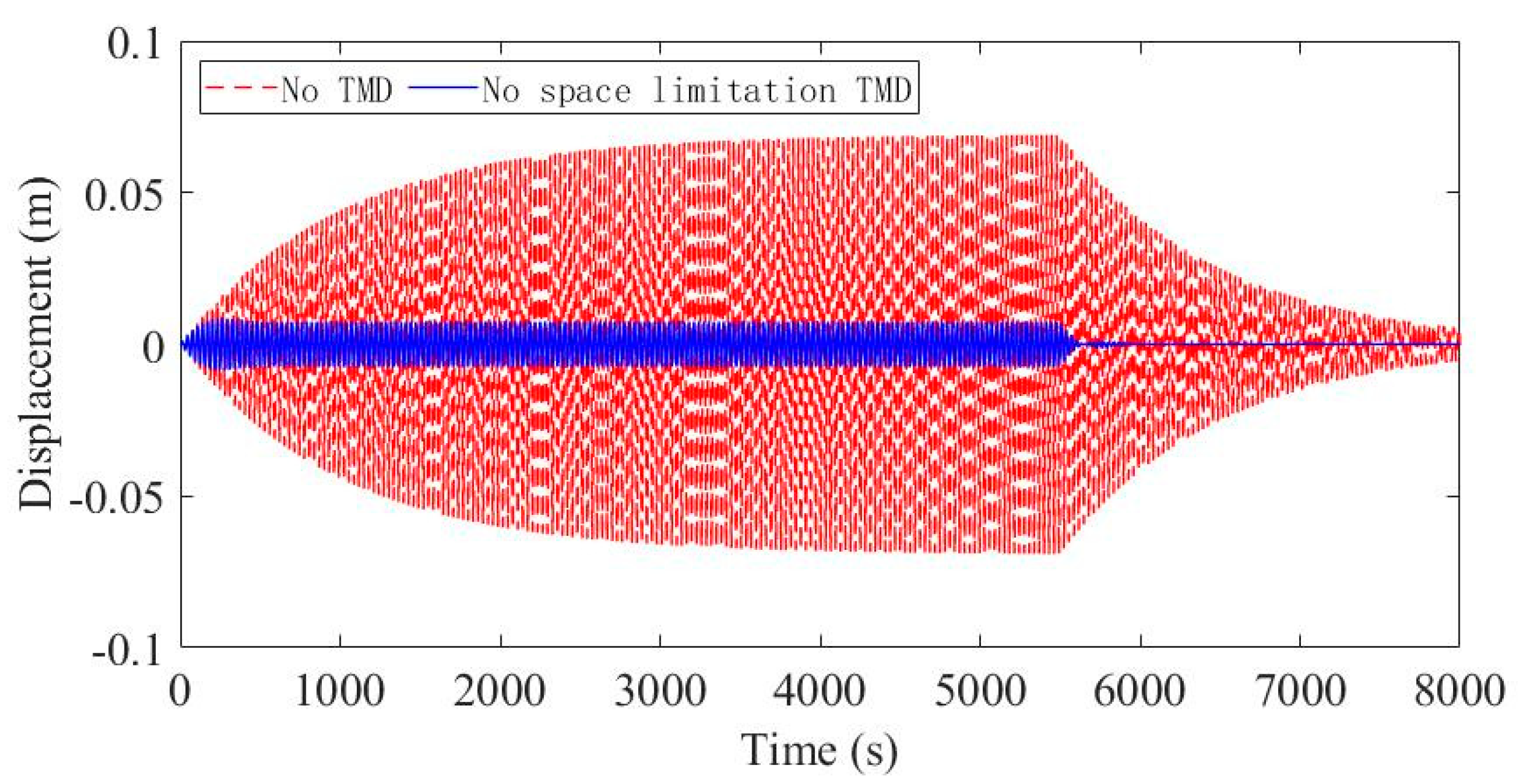
According to the SDOF-TMD optimization theory, related formulas of SDOF-TMD for vibration control were derived, and the TMD stiffness parameter and damping parameter were optimized. Considering the nacelle space constraint, TMD parameters need to be optimized under TMD stroke restrictions. The dynamic simulation analysis of the semi-submersible floating wind turbine with a double-rope mooring system under certain sea conditions was carried out, in which TMD with and without stroke limitation and without TMD was compared for their vibration reduction performance. The equivalent damping ratios of the floating wind turbine with stroke-limited TMD and stroke-unlimited TMD and without TMD were compared and analyzed. The results show that the installation of TMD has an obvious vibration-reduction effect on the floating wind turbine, and the vibration-reduction effect of TMD without stroke restrictions is more obvious than that of TMD with stroke limitations. However, considering the actual situation, it is necessary to impose stroke limitations on TMD.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}