1. Introduction
Floating offshore wind turbines have been proven as one of the main elements of future green transition in the world. Many countries have begun to vigorously develop offshore wind power green energy to replace fossil energy.
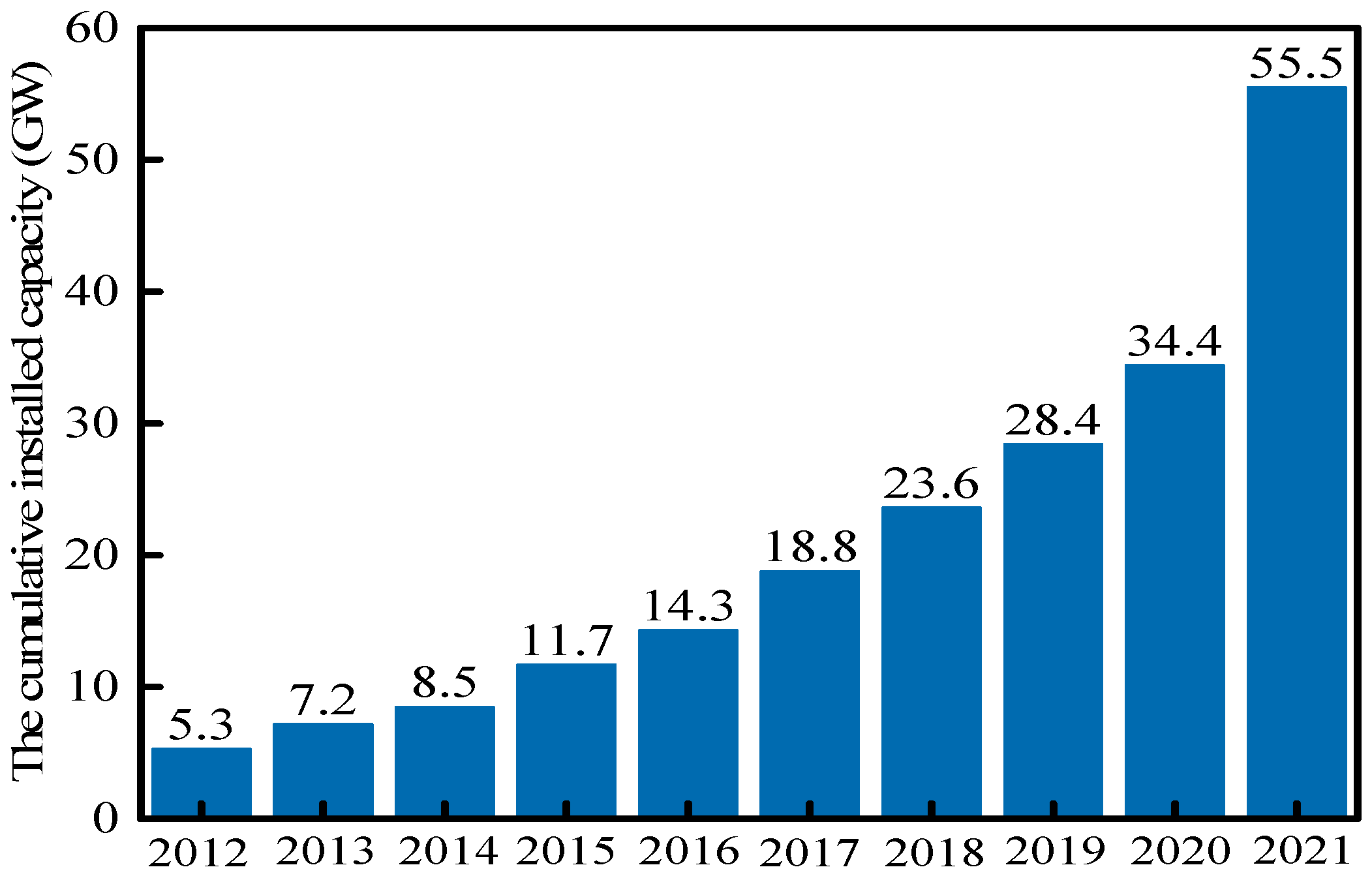
Figure 1 shows the cumulative installed capacity of offshore wind power in the world in the past ten years. It can be seen that there has been a significant increase in the installed capacity of offshore wind turbines in 2021. However, current wind energy development is mainly located in shallow water areas, where the available space and energy are limited. Additionally, with the continuous development of human being populations, pollution in shallow water will inevitably occur. In order to alleviate these problems, developing wind power in deep sea has begun to be addressed.
Compared to shallow water, the deep sea has more space and resources, but it is accompanied by more complex environmental loads and construction conditions. For wind turbines in shallow water, their foundation form is mostly fixed, but the high cost of the fixed type makes it no longer applicable in the deep sea [
1], which indicates that it needs to be replaced by a floating platform form. Compared to the fixed-type wind turbine, the floating offshore wind turbine (FOWT) is a higher dynamic system because it is simultaneously affected by wind, current and wave loads and constrained by the mooring system [
2]. At present, the development of global floating offshore wind turbines is in the stage of technological breakthroughs. In 2021, China’s first FOWT was installed and successfully connected to the grid for power generation in the Yangjiang River, Guangdong Province.
With regard to floating offshore wind turbines, there are four main types: spar type [
3], semi-submersible type [
4], tension leg type [
5] and barge type [
6]. Ye and Ji [
7] studied the dynamic response of a spar-type direct-drive wind turbine subjected to external and internal excitations. Soeb et al. [
8] analyzed the nonlinear motion response of a spar platform under wave and current loads. Based on the viscous flow theory, Tran and Kim [
9] carried out a numerical study on the hydrodynamic characteristics of a semi-submersible FOWT under waves. Bayati et al. [
10] studied the dynamic response characteristics of semi-submersible platforms under different water depths. Oguz et al. [
11] studied the Iberdrola TLP FOWT experimentally and numerically under realistic wind and wave conditions. They found that the effect of wind significantly contributed to the overall response of the platform, while changes in wave conditions had relatively little effect on the platform response. So far, most of the studies have been focused on the spar type, semi-submersible type and tension leg type. This is because the hydrodynamic performance of the barge platform was not satisfactory enough compared to other platforms in the past; in recent years, however, IDEOL [
12] developed the concept of “moon pool” (a pool that runs up and down in the middle of the barge platform) to improve the hydrodynamic performance of barge-type platforms, reduce the kinematic response and construction costs. Now, the barge-type platform is also starting to be noticed.
Ikoma et al. [
6] studied the motion responses of a barge-type floating system with four moon pools and a vertical-axis wind turbine by experiment and numerical simulation. Through this study, it was found that the water motions and free-surface shapes were different at particular frequencies in the front and rear moon pools. Yang et al. [
13] analyzed the mooring tension of the coupled tunnel–barge system in waves, where the restraining effect of the steel four-leg catenary mooring system on the tunnel–barge system and the changing law of tension were considered in detail. The research of Chuang et al. [
14] found that the stability of the barge-type platform should be improved in the pitch rotation in extreme conditions. Yang et al. [
15] investigated the impact of a mooring breakage on the dynamic responses of the rotor, platform and remaining mooring lines of the barge-type FOWT, and demonstrated the benefit of shutdown in ensuring the safe operation of the FOWT with mooring line breakage. A preliminary study of the Japan Kitakyushu barge-type FOWT demonstration project was conducted by Kosashi et al. [
16], where the response amplitude operator, statistical value and amplitude spectral densities obtained from experimental tests were compared with the simulation results, and a good agreement was observed.
The above work on the barge-type FOWT is mainly focused on small or medium-sized wind turbines with 5 MW and below. With the vigorous development of green energy, 5 MW FOWTs are no longer enough to meet the demand, and large-scale offshore wind power has begun to appear due to the benefits of more power per unit of sea area and better economics of scale. A 10 MW reference wind turbine [
17] was proposed by the Technical University of Denmark (DTU) Wind Energy and Vestas. The 10 MW FOWT, with larger turbine blades, tower and floating platform, inevitably undertakes larger local loads and overturning moments induced by wind, wave and current [
18]. These features significantly increase platform heeling motion, unstable aerodynamics, structural vibrations, fatigue and extreme loads on the tower and blades. Therefore, the dynamic response and operating safety of the 10 MW FOWT under various sea conditions are required to be considered in detail. Zhao et al. [
19] presented a conceptual semi-submersible platform to support a 10 MW wind turbine through aero-hydro-servo-elastic fully coupled analysis using the OpenFast v2.4.0 code. Based on the structure designed by DNV, the complete stability and dynamic response of the newly designed semi-submersible FOWT under different fault conditions were studied. An optimal semi-submersible platform was designed by Ferri et al. [
20] to support the 10 MW wind turbine by adjusting the diameters of the outer cylinders and radial distances from the center of the platform. Ahn and Shin [
21] performed the model testing and numerical simulation of a 10 MW FOWT to reveal its dynamic characteristics induced by regular waves over different periods. At present, there have been some studies on semi-submersible 10 MW FOWTs, while the related research on 10 MW barge-type FOWTs are still scarce.
Currently, deep-sea aquaculture has become another new focus of development in various countries due to its high return. In order to improve the technology and benefits of deep-sea aquaculture, some new forms of aquaculture cages have been proposed by combining technologies from fish farming and offshore infrastructures, such as the vessel-shaped “Havfarm” concept, the “Arctic Offshore Farming” concept, the “egg” closed cage concept and the semi-submersible “Sea Farm 1” concept [
22]. Considerable studies have been carried out to investigate the characteristics of deep-sea aquaculture cages. Zhao et al. [
23] considered the effects of plane net inclination angles, heights, distance between two nets and nets number on the flow field around the plane net by physical model test and numerical simulation. Bi et al. [
24] obtained the flow field of the planar net with different degrees of biological contamination by submerging it in different water depths and for different durations; then, the empirical formulas of predicting the resistance and downstream flow velocity of waterborne fouling networks were proposed by experiments and numerical simulations. Dong et al. [
25] conducted a series of experiments on different types of net planes in the wave trough and developed a net plane wave force model that can accurately calculate the wave force on the net plane. By comparing the numerical and experimental results, a method for the structural analysis of aquaculture nets was developed and it was concluded that the resistance load and cage volume depend on the size and weight of the net system [
26].
In recent years, the combination concept of the aquaculture cage and the FOWT has been proposed, which can make use of the sea space more efficiently and lower the construction cost by sharing the floating platform. Moreover, the electricity generated by the FOWT can also be directly supplied to the aquaculture equipment. Based on the above advantages, this concept attracted the attention of scholars as soon as it was proposed. Lei et al. [
27] designed a floating offshore wind turbine with a steel fish cage (FOWT–SFFC), and studied the motion response and nonlinear dynamic performance of the structure. Liang et al. [
28] developed an offshore floating multipurpose platform for Blue Growth Farm that supports a 10 MW wind turbine on one side of the platform with fish cages, and the results of numerical simulation show that the hydrodynamic characteristics of the multifunctional platform are excellent. Abhinav et al. [
29] proposed a novel multi-purpose platform (MPP) by retrofitting a feed barge with a small wind turbine and analyzing its performance in the frequency domain. Zhai et al. [
30] used AQWA to investigate the hydrodynamics of a barge-type FOWT with an aquaculture cage and found that the presence of the aquaculture cage makes the structure more sensitive to current.
In summary, the related conceptual designs and dynamic analyses on the integrated structure of combing an FOWT and aquaculture cage are relatively few in comparison to the FOWT or aquaculture cage, and much lesser in comparison to the large-scale barge-type FOWT with an aquaculture cage. However, relative to other types of floating platform, the barge-type platform is simple in structure, low in cost and long in life; moreover, a moon pool throughout the barge-type platform provides additional space for mariculture and the fish farming equipment can be placed on the platform directly. Therefore, research on the large-scale barge-type floating offshore wind turbine with an aquaculture cage (LSBT-FOWT-AC) is necessary for the development of deep-sea energy.
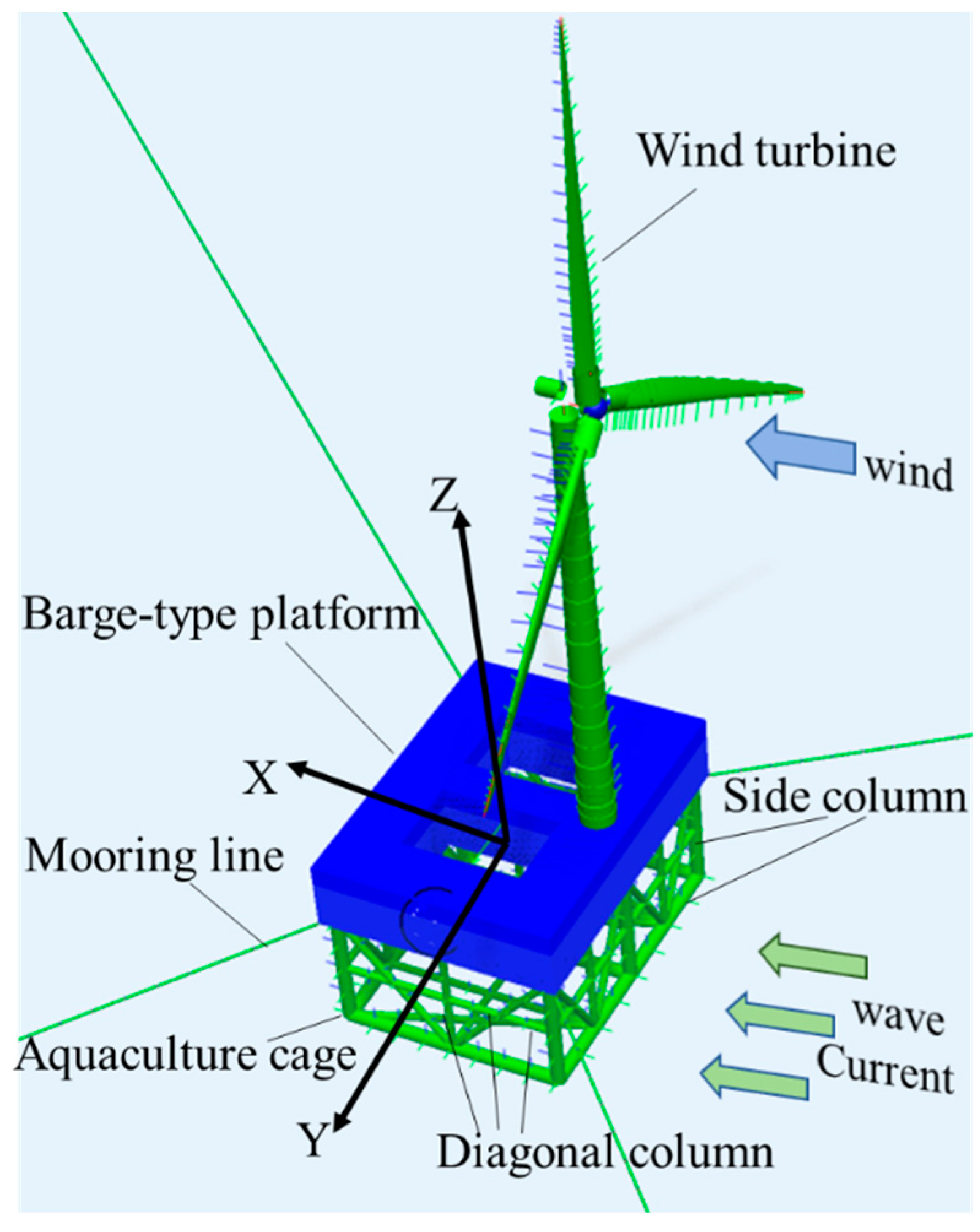
In this study, a novel LSBT-FOWT-AC is designed and its dynamic responses under various sea conditions are analyzed. The remainders of this paper are organized as follows:
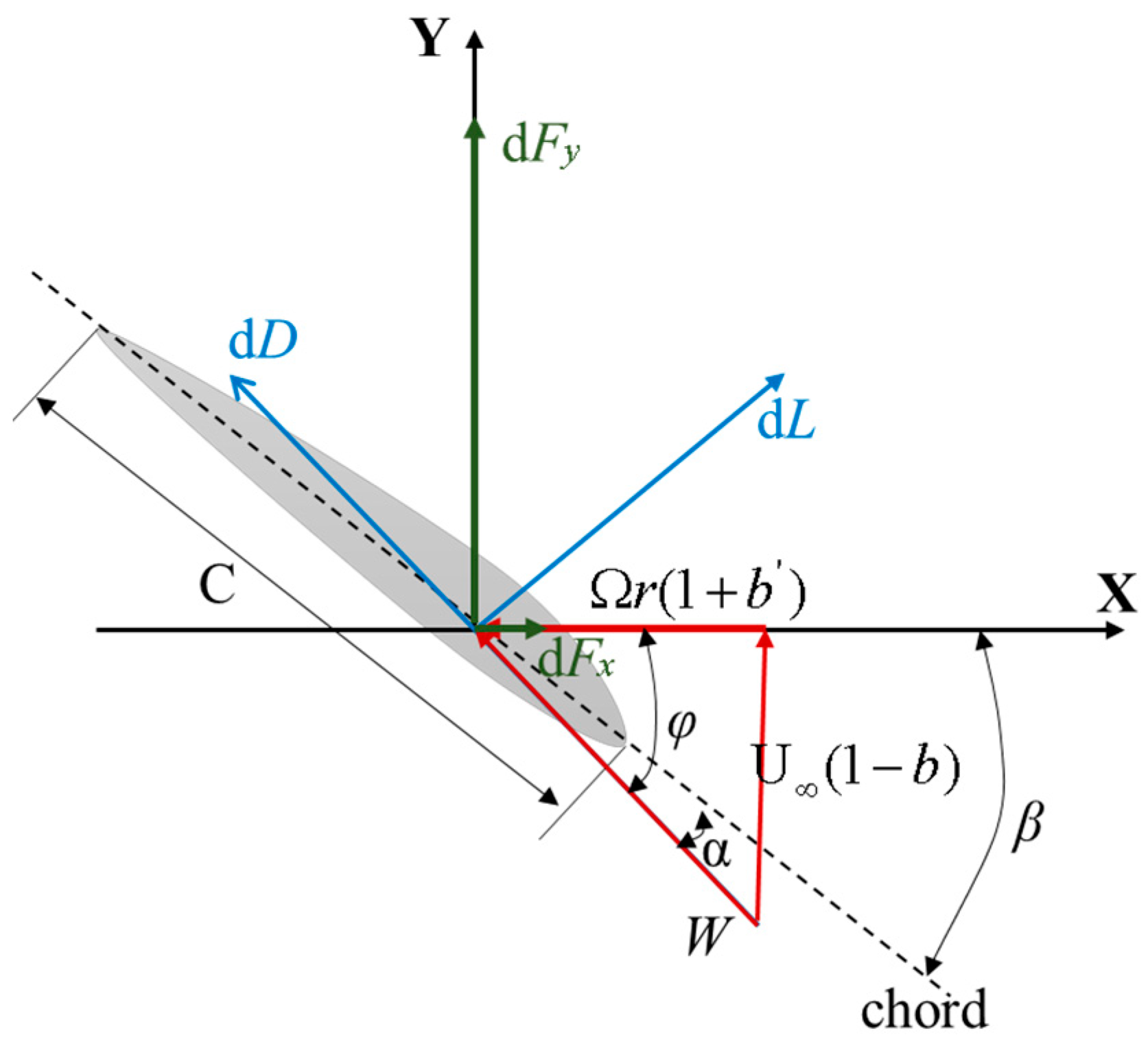
Section 2 introduces the theoretical methods used in this research;
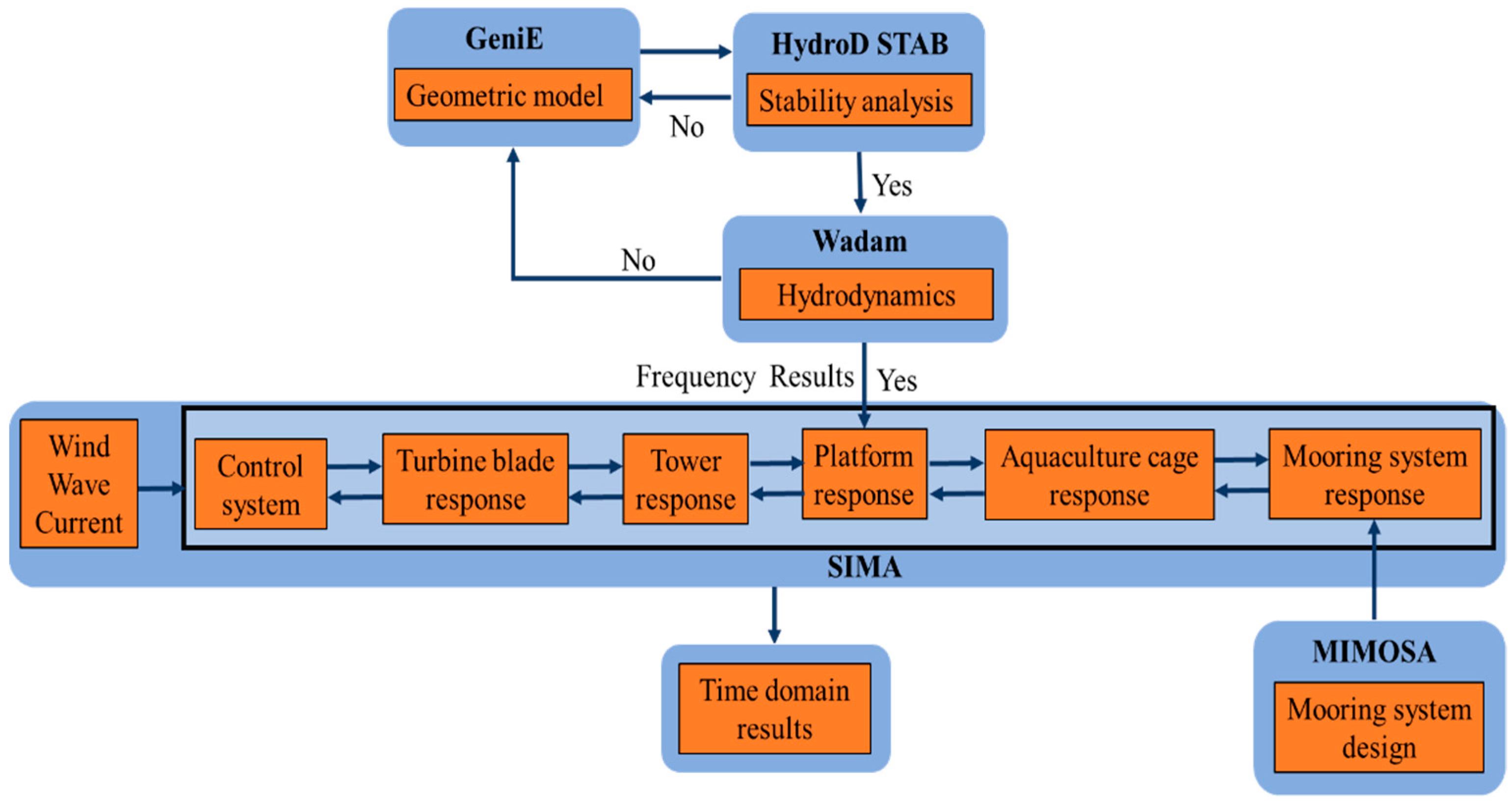
Section 3 introduces the design process, stability analysis and simulation environment of the LSBT-FOWT-AC. In
Section 4, the results and discussion of this study are reported.
Section 5 presents the conclusions of this work. Finally,
Section 6 presents the future work.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}