
Model Reference Adaptive Vibration Control of an Offshore Platform Considering Marine Environment Approximation

Abstract
:1. Introduction
- The adaptive control method is applied to the offshore platform containing time-varying features for the purpose of vibration attenuation;
- The reference model with an environmental compensation scheme provides the online-adjusting adaptive control force input;
- The data-driven approximation strategy of the ocean environment is realized through a wavelet neural network.
2. Model Description
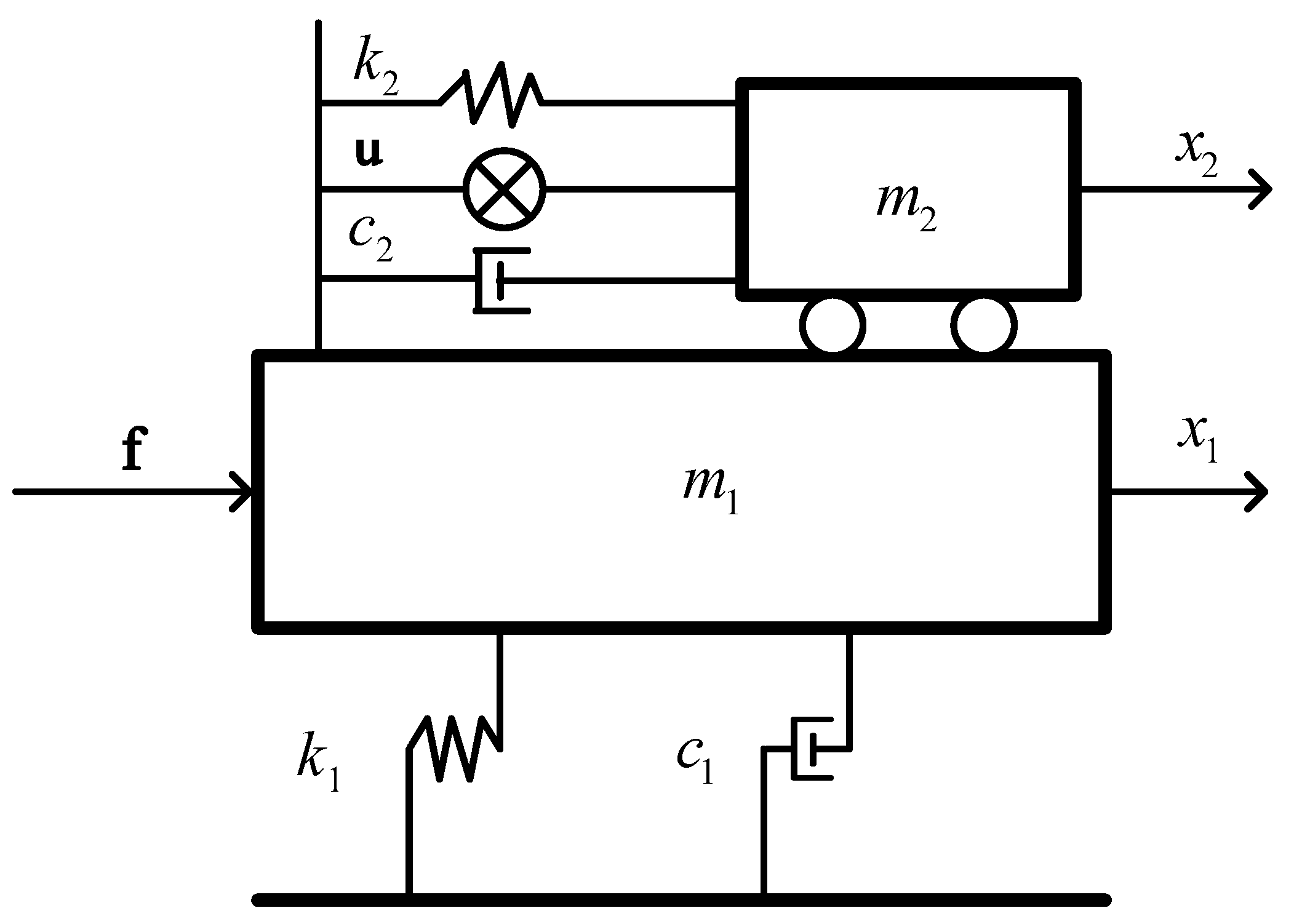
2.1. Active Mass Damper System of the Offshore Platform
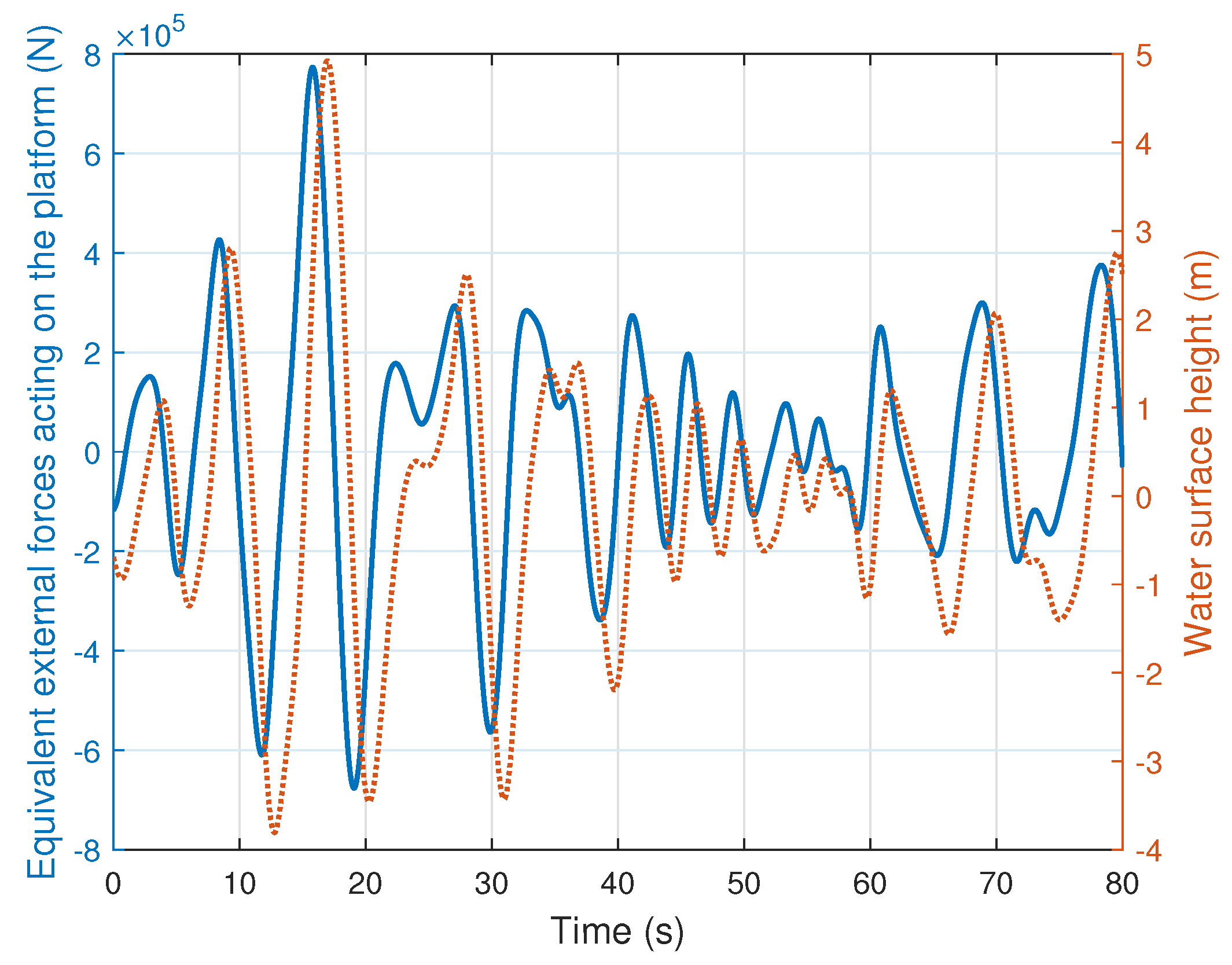
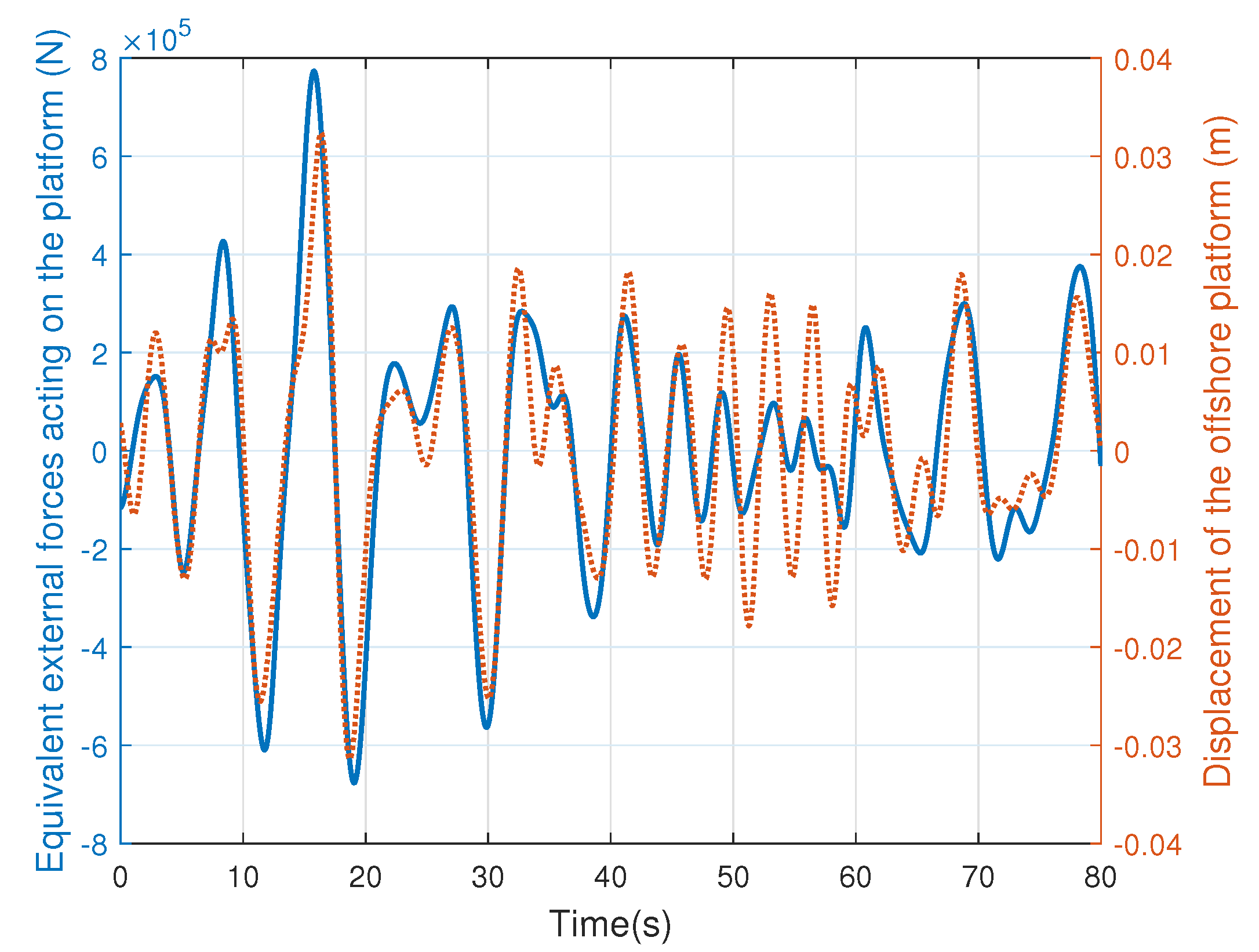
2.2. Loads Acting on the Platform
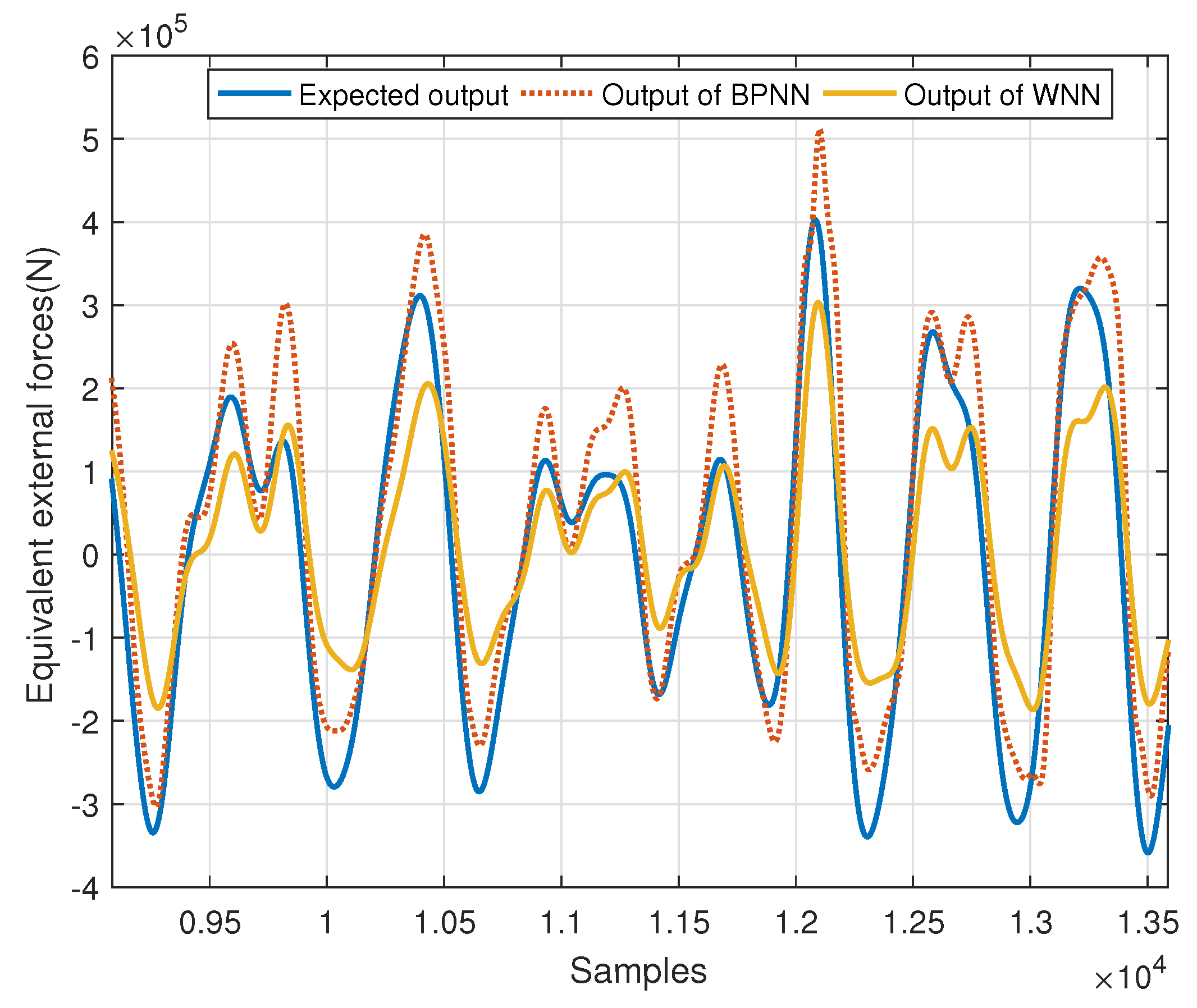
2.3. Data-Dependent Approximation of the Loads
3. Main Results
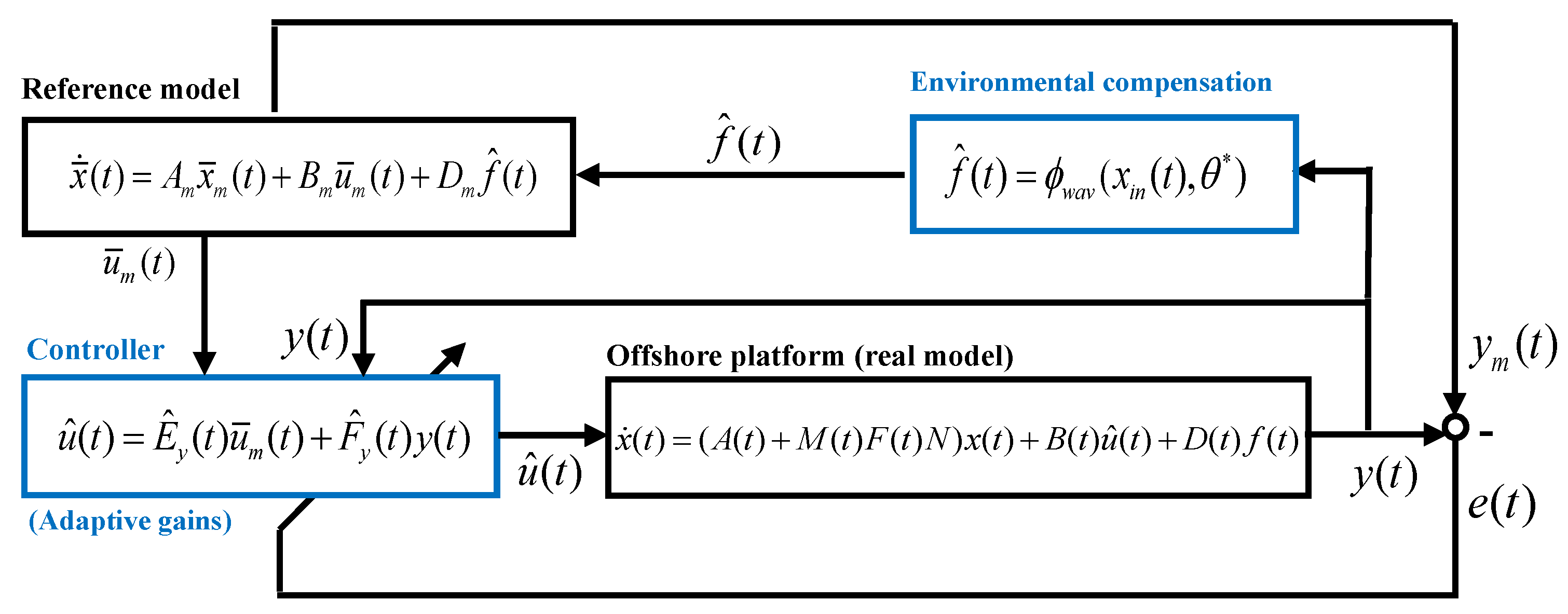
3.1. Environmental Compensation Scheme inside the Reference System
3.2. Model-Based Adaptive Controller Design
4. Numerical Results and Discussions
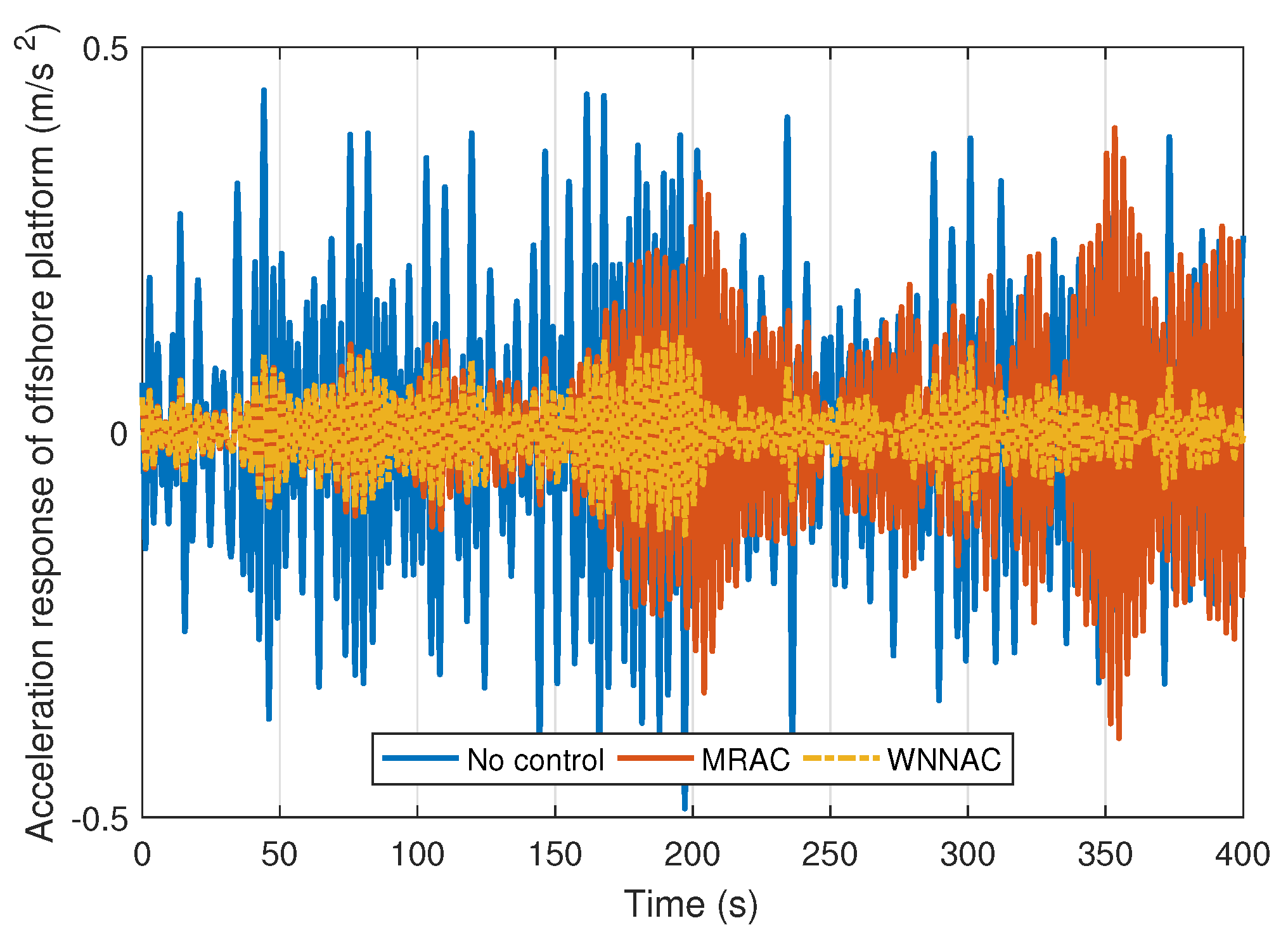
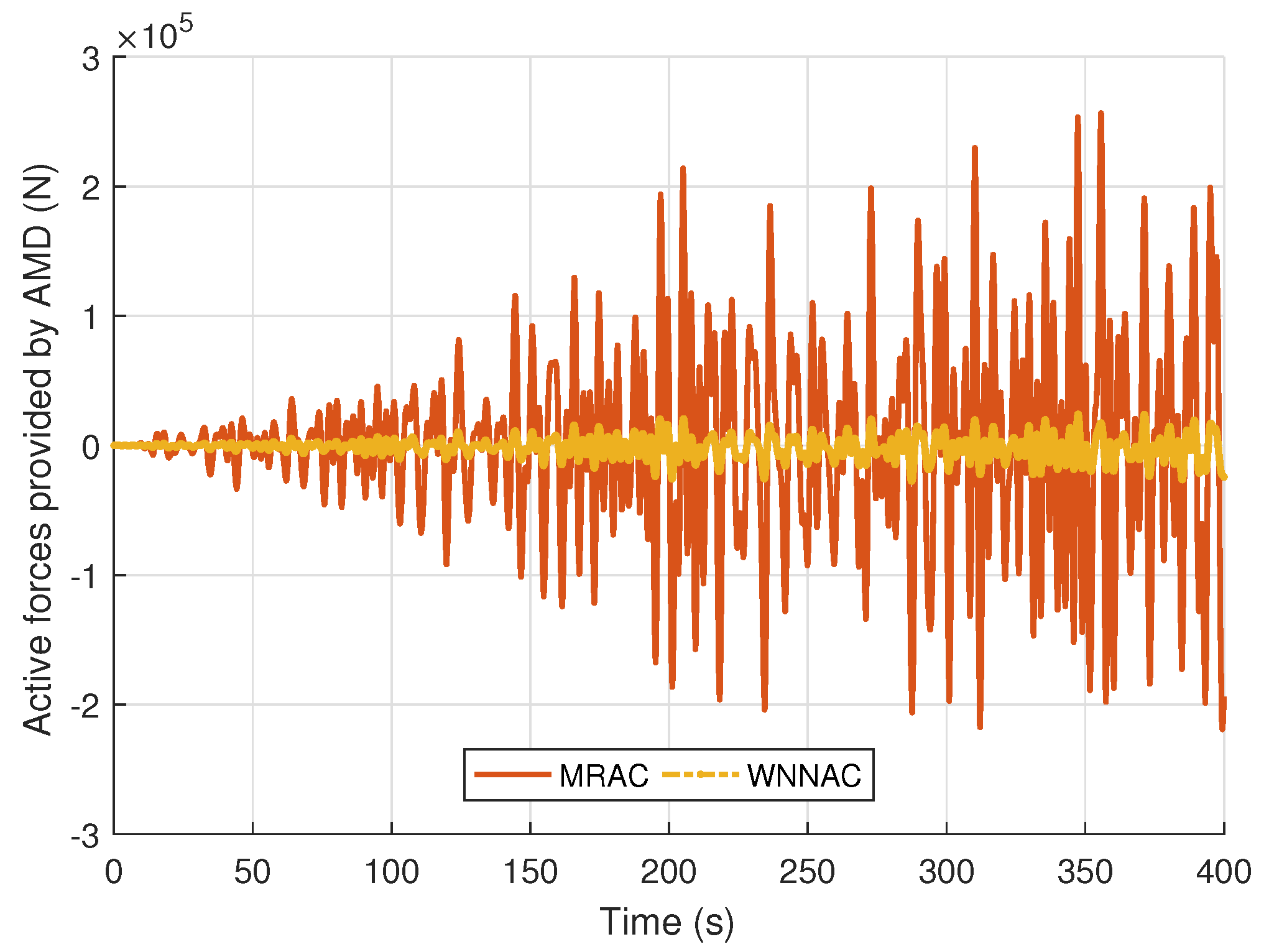
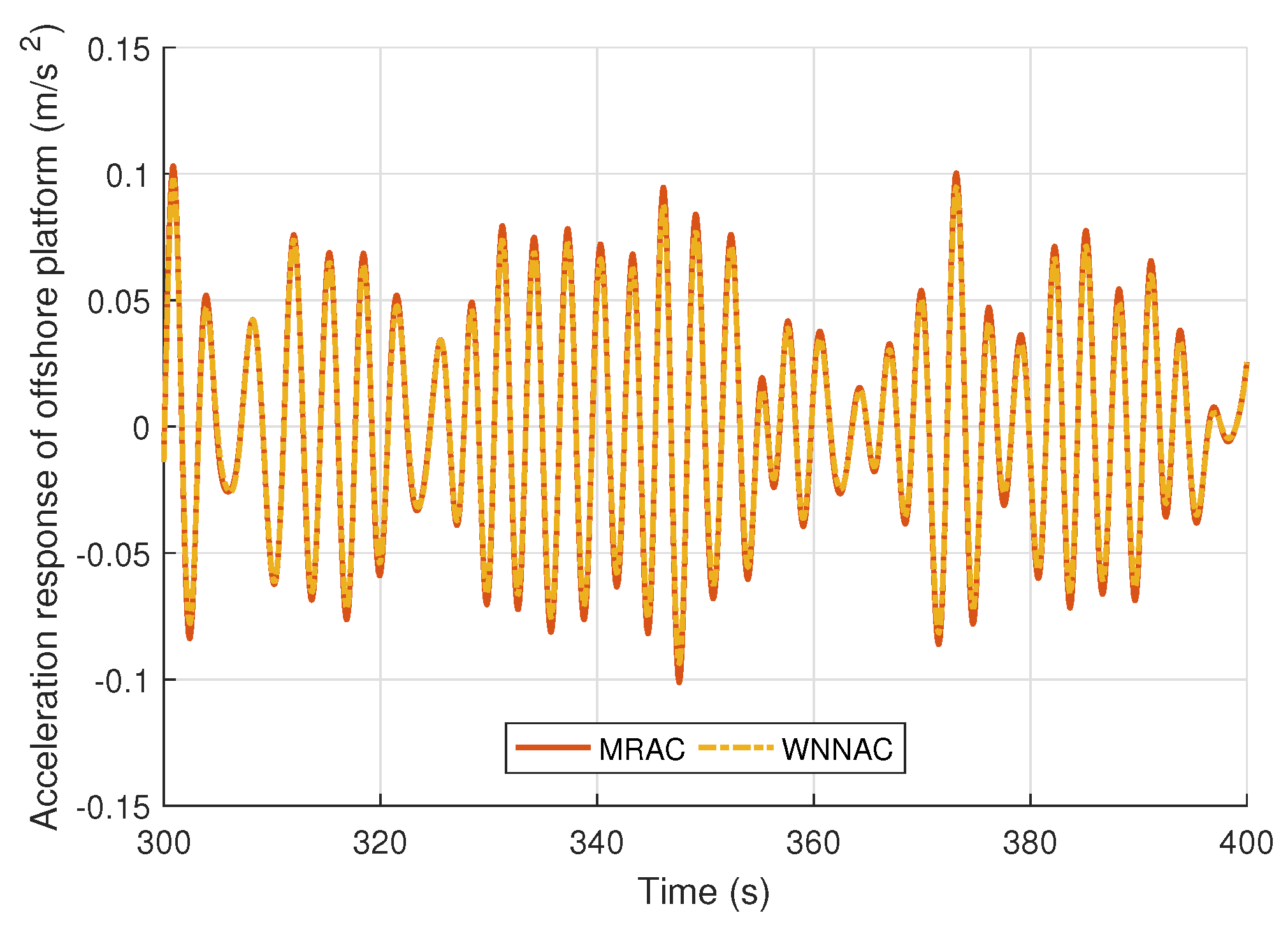
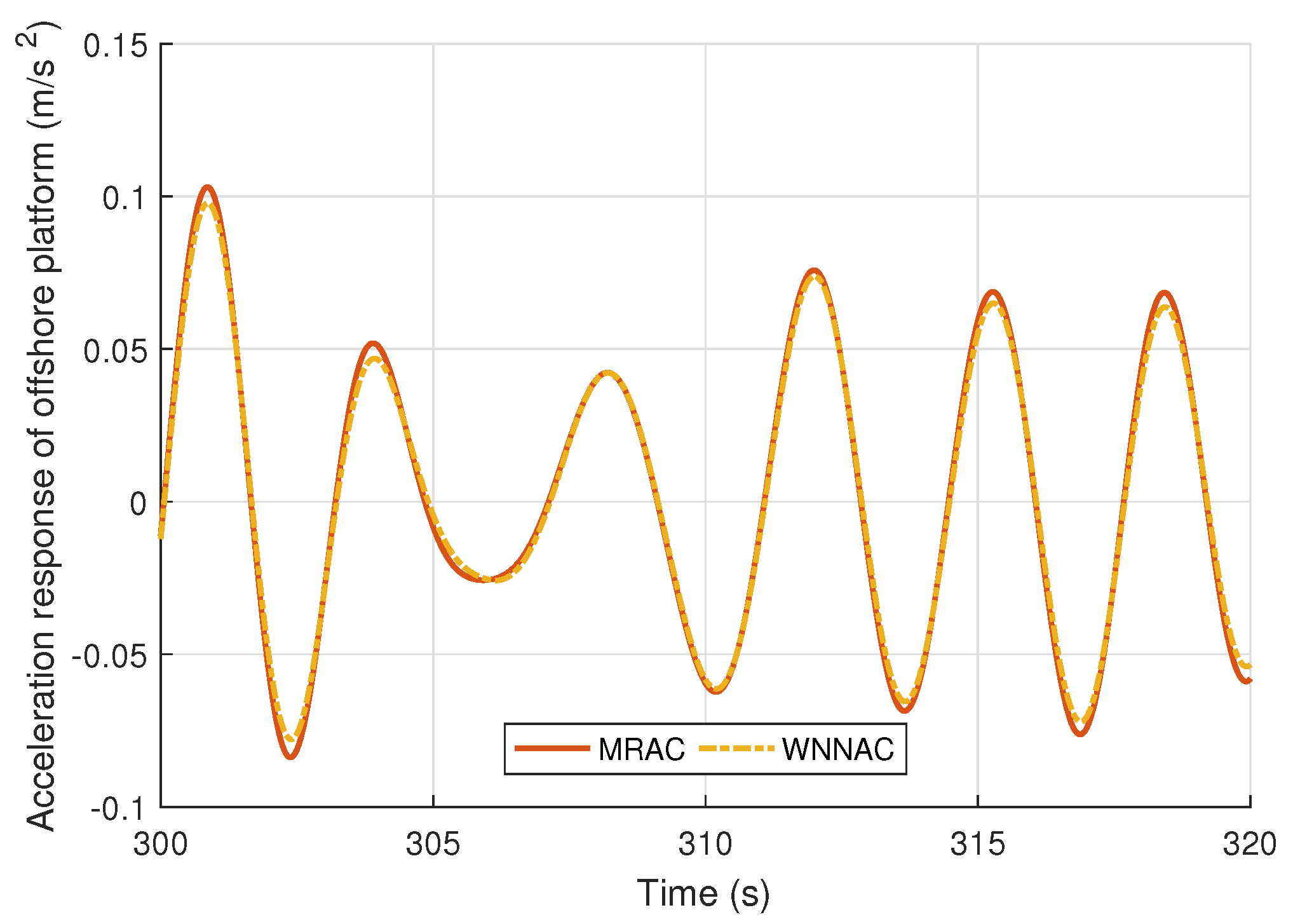
4.1. Simulating Verification of the Offshore Platform with Active Mass Damper to Suppress Vibration
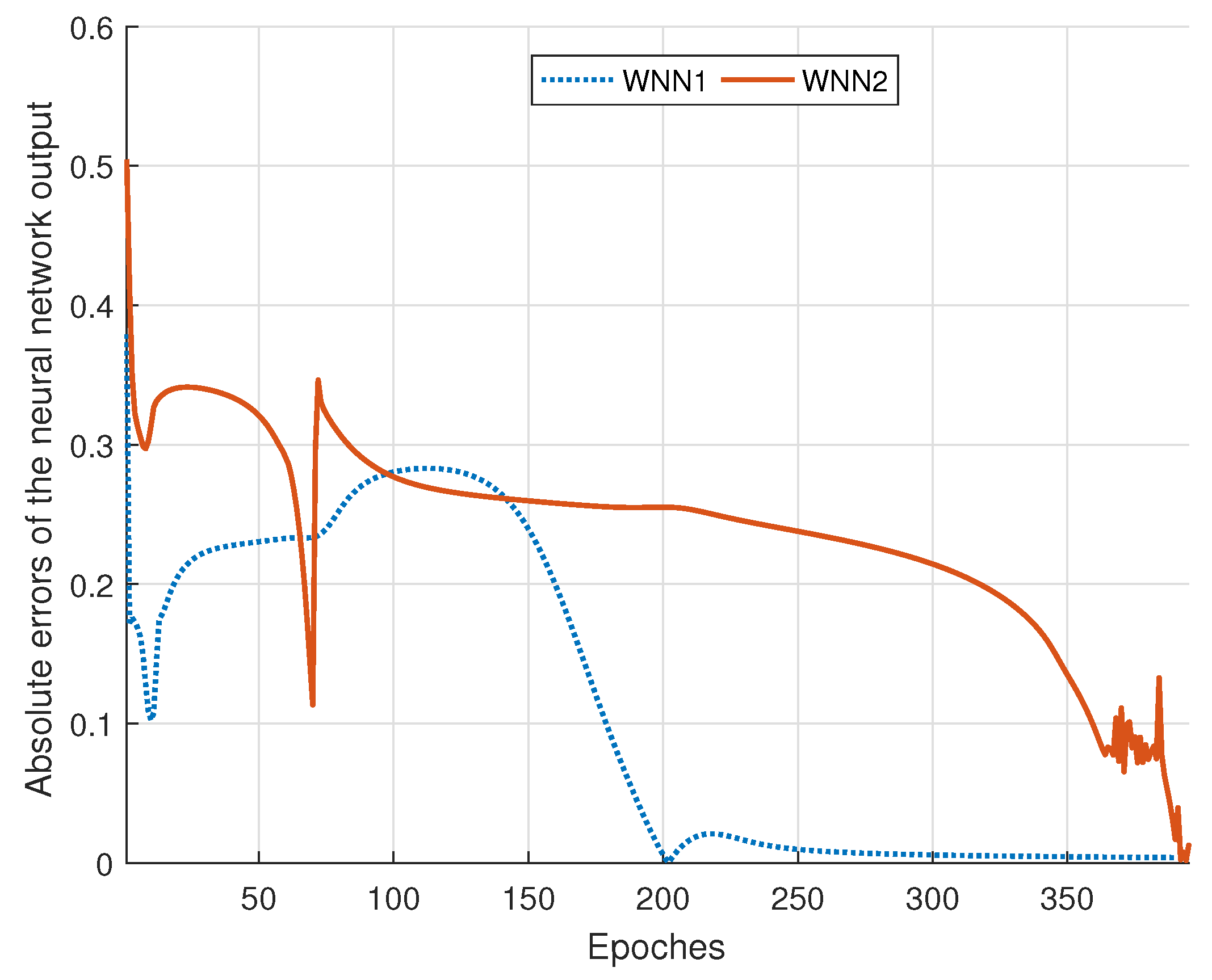
4.2. Adaptive Core and Reference Input Chosen for Disturbance Approximation
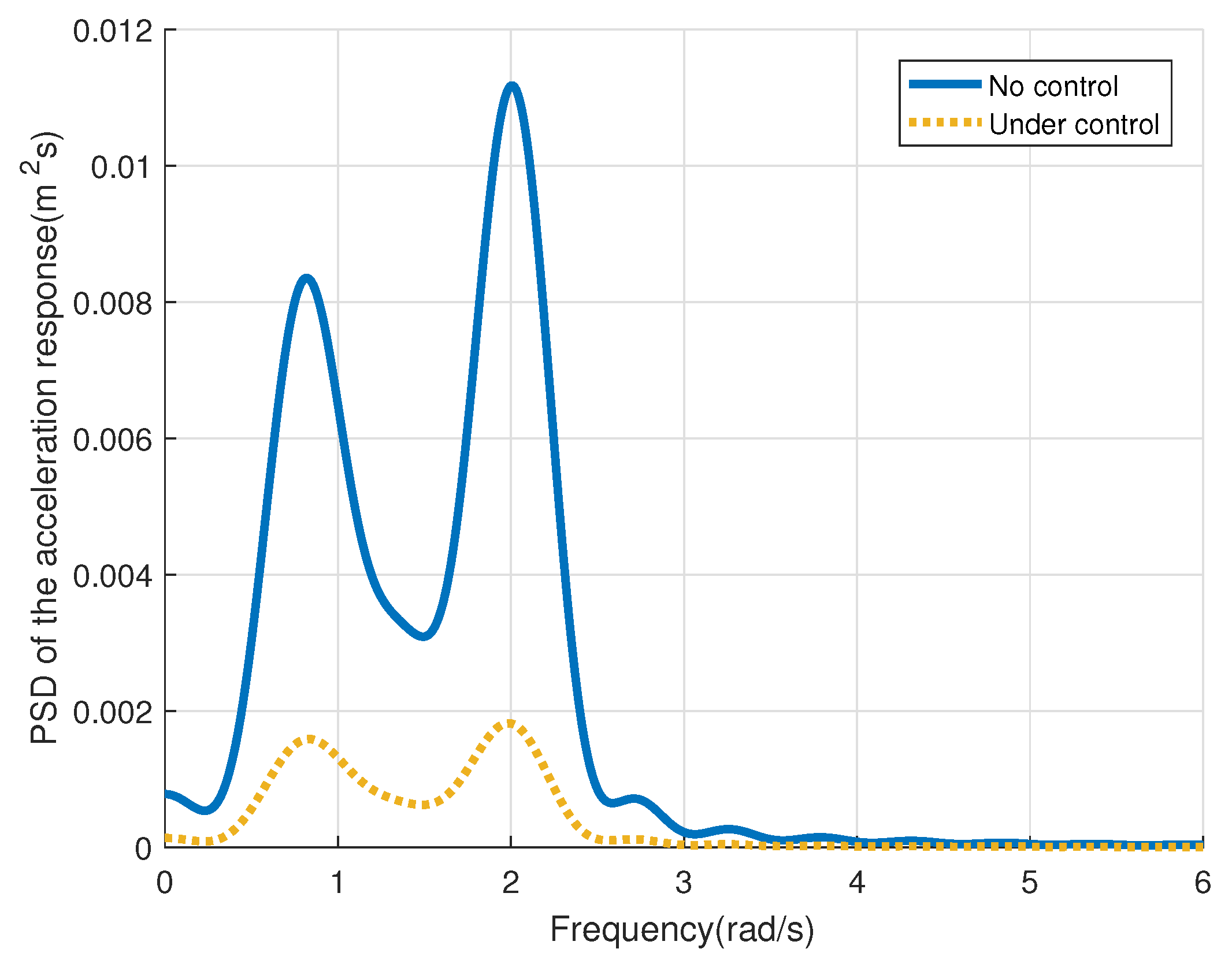
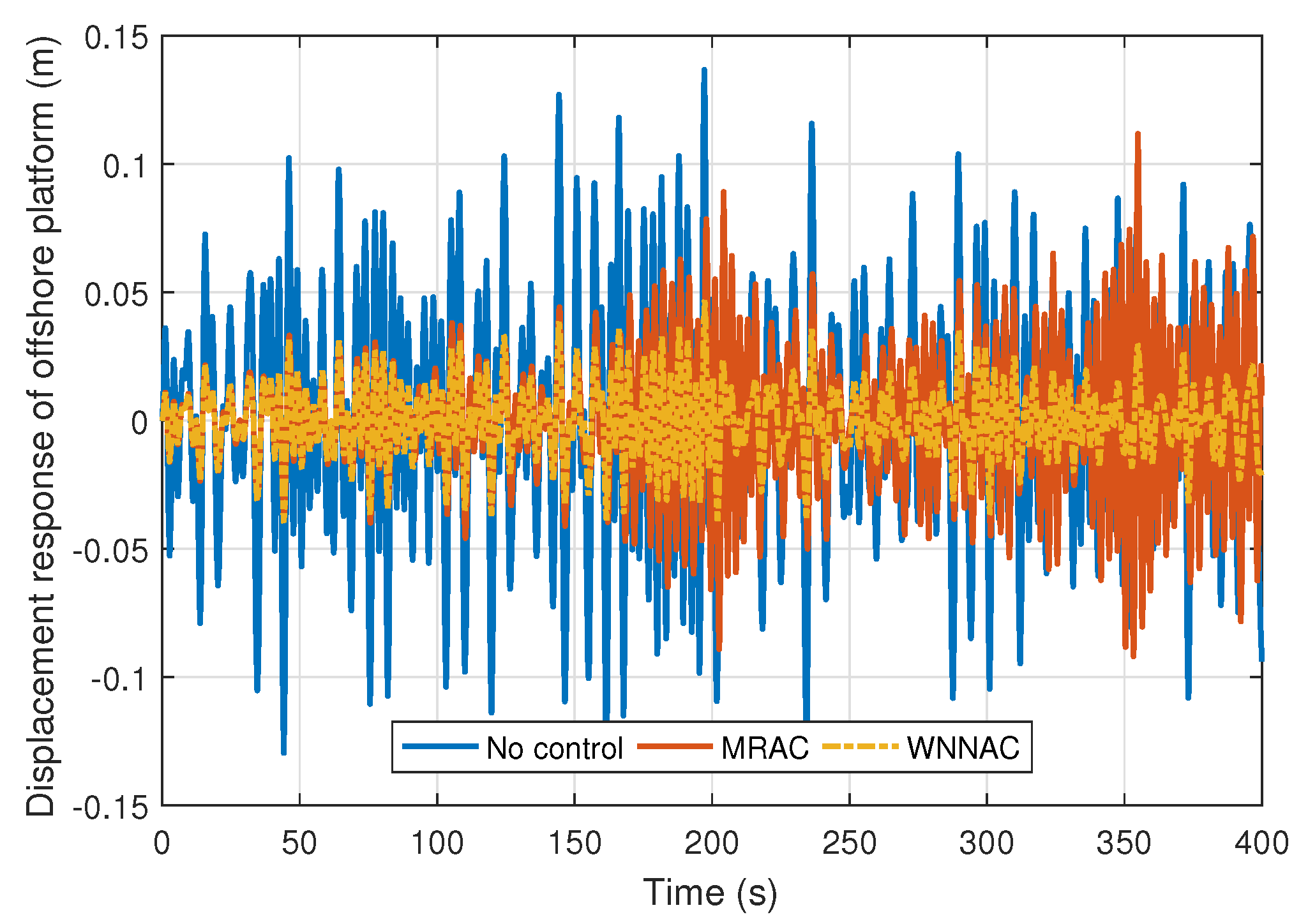
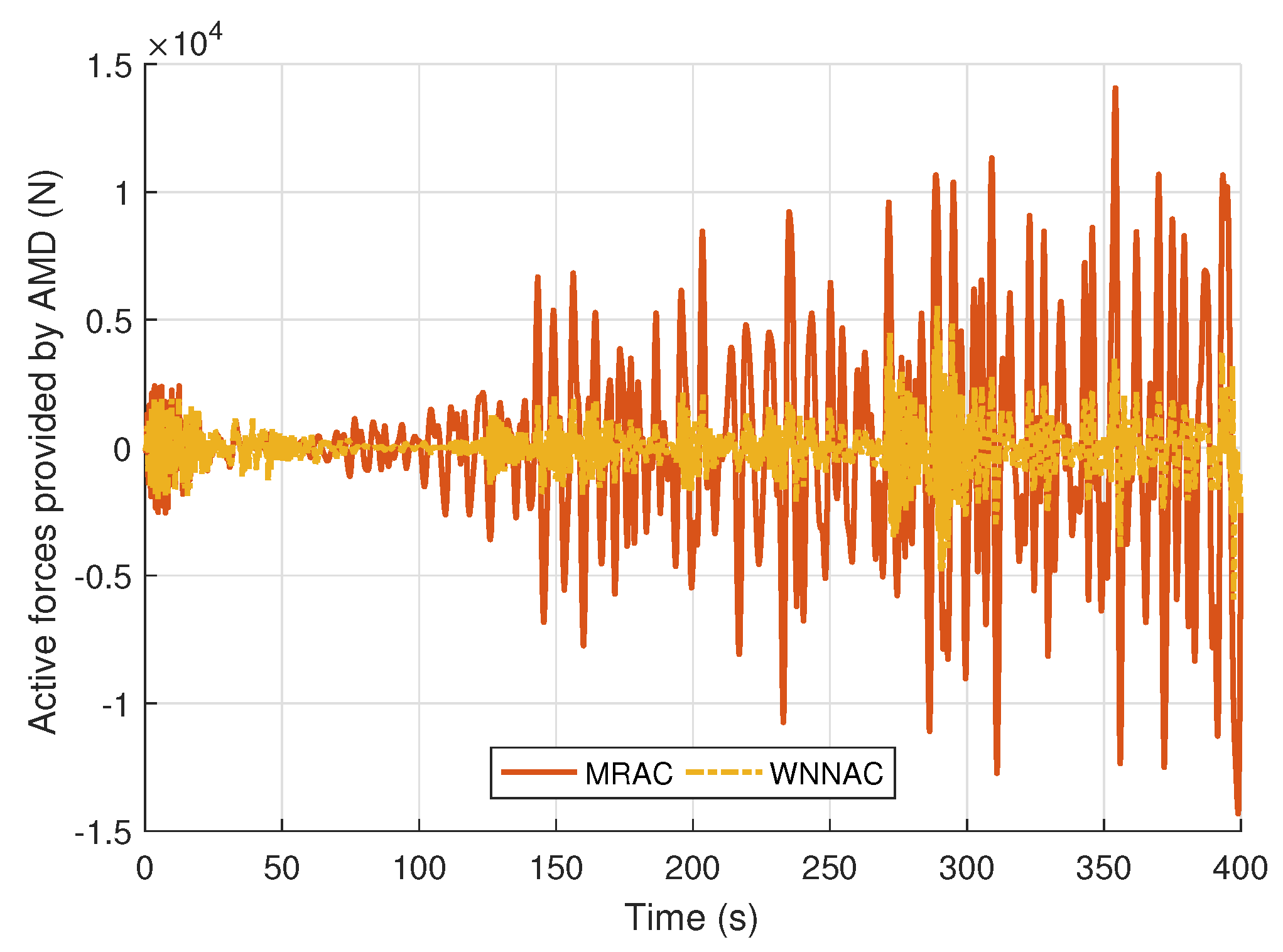
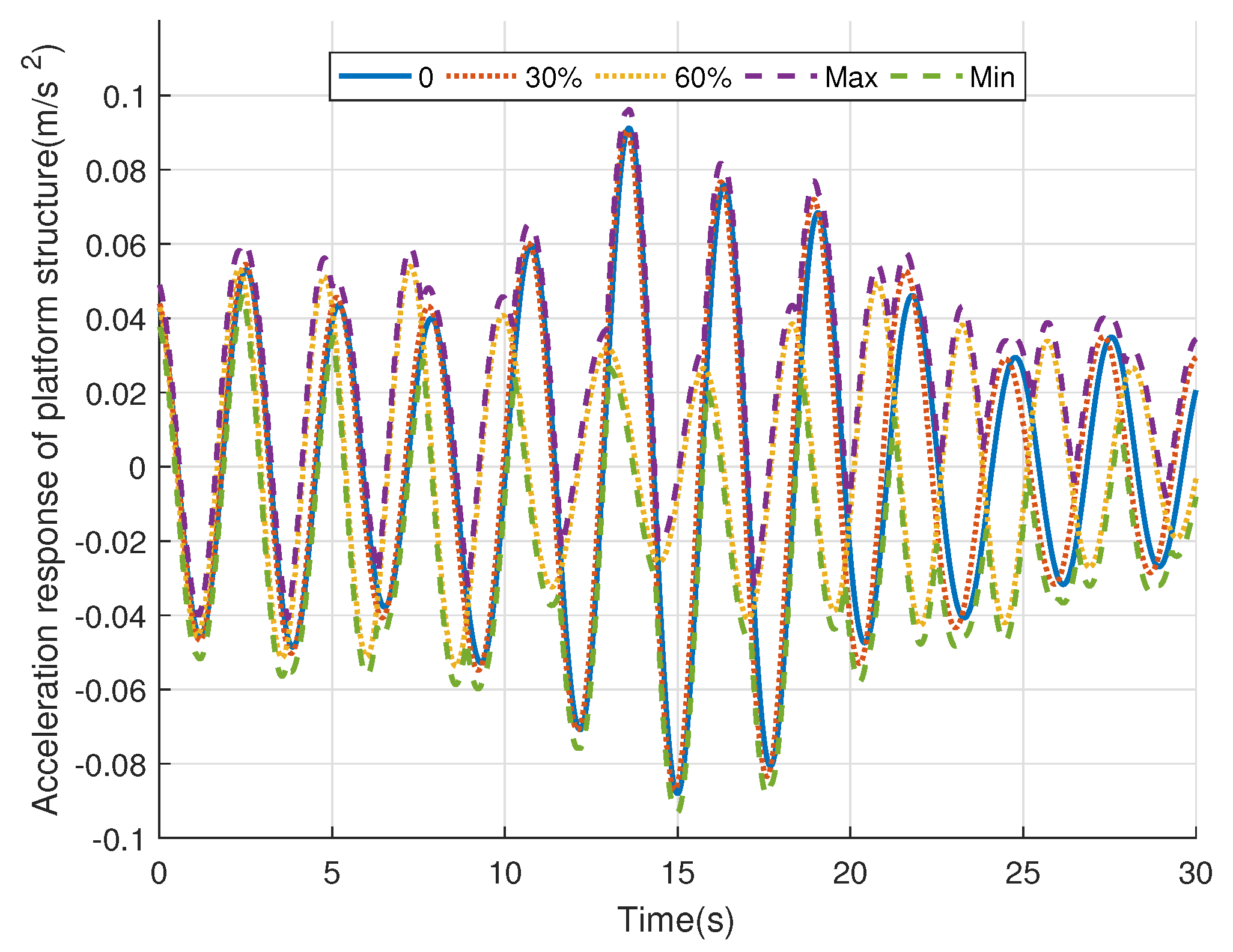
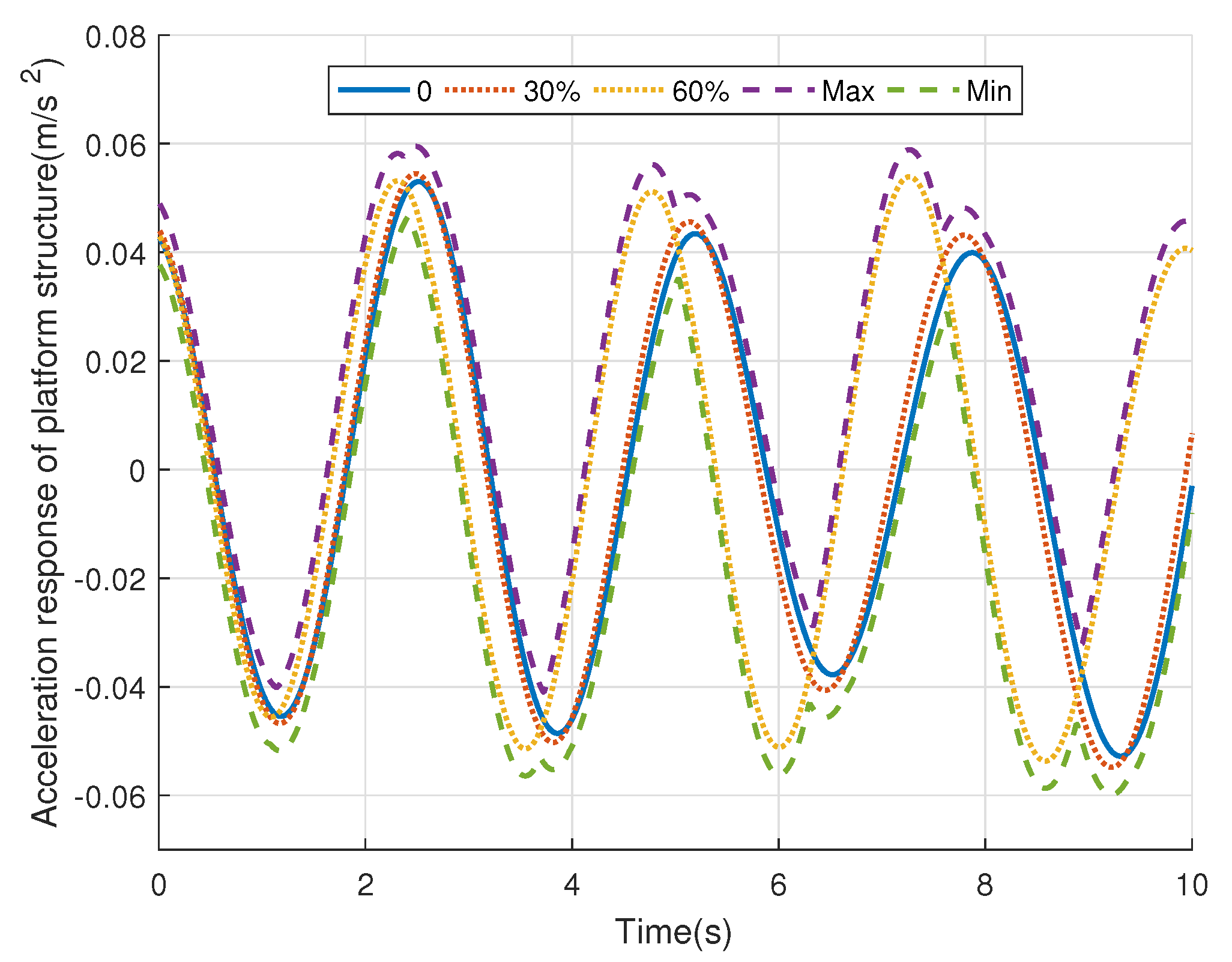
4.3. Controller Test Using Different Reference Models
- Case 1. Control Performance with No. 1 Reference Model
- Case 2. Control Performance with Different Reference Models
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Erdogan, C.; Swain, G. The effects of biofouling and corrosion products on impressed current cathodic protection system design for offshore monopile foundations. J. Mar. Sci. Eng. 2022, 10, 1670. [Google Scholar] [CrossRef]
- Hemmati, A.; Oterkus, E. Semi-active structural control of offshore wind turbines considering damage development. J. Mar. Sci. Eng. 2018, 6, 102. [Google Scholar] [CrossRef] [Green Version]
- Yang, D.H.; Shin, J.H.; Lee, H.; Kim, S.K.; Kwak, M.K. Active vibration control of structure by Active Mass Damper and Multi-Modal Negative Acceleration Feedback control algorithm. J. Sound Vib. 2017, 392, 18–30. [Google Scholar] [CrossRef]
- Zhao, Y.D.; Sun, Y.T.; Zhang, B.L.; Han, Q.L.; Zhang, X.M. Recoil control of deepwater drilling riser systems via optimal control with feedforward mechanisms. Ocean. Eng. 2022, 257, 111690. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, B.L.; Han, Q.L.; Pang, F.B.; Sun, Y.T.; Zhang, X.M. Recoil attenuation for deepwater drilling riser systems via delayed H∞ control. ISA Trans. 2022; in press. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.D.; Sun, Y.T.; Zhang, B.L.; Zhang, D. Delay-feedback-based recoil control for deepwater drilling riser systems. Int. J. Syst. Sci. 2022, 53, 2535–2548. [Google Scholar] [CrossRef]
- Chen, Q.; Hu, Y.; Zhang, Q.; Jiang, J.; Chi, M.; Zhu, Y. Dynamic damping-based terminal sliding mode event-triggered fault-tolerant pre-compensation stochastic control for tracked ROV. J. Mar. Sci. Eng. 2022, 10, 1228. [Google Scholar] [CrossRef]
- Wu, D.; Chen, H.; Huang, Y.; Chen, S. Online monitoring and model-free adaptive control of weld penetration in vppaw based on extreme learning machine. IEEE Trans. Ind. Inform. 2019, 15, 2732–2740. [Google Scholar] [CrossRef]
- Calliess, J.P.; Roberts, S.J.; Rasmussen, C.E.; Maciejowski, J. Lazily Adapted Constant Kinky Inference for nonparametric regression and model-reference adaptive control. Automatica 2020, 122, 109216. [Google Scholar] [CrossRef]
- Gaudi, J.E.; Gibson, T.E.; Annaswamy, A.M.; Bolender, M.A.; Lavretsky, E. Connections between adaptive control and optimization in machine learning. In Proceedings of the IEEE 58th Conference on Decision and Control (CDC), Nice, France, 11–13 December 2019; pp. 4563–4568. [Google Scholar]
- Petković, D.; Danesh, A.S.; Dadkhah, M.; Misaghian, N.; Shamshirband, S.; Zalnezhad, E.; Pavlović, N.D. Adaptive control algorithm of flexible robotic gripper by extreme learning machine. Robot. Comput.-Integr. Manuf. 2016, 37, 170–178. [Google Scholar] [CrossRef]
- Cui, R.; Yang, C.; Li, Y.; Sharma, S. Adaptive control algorithm of flexible robotic gripper by extreme learning machine. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 1019–1029. [Google Scholar] [CrossRef] [Green Version]
- Faradonbeh, M.K.S.; Tewari, A.; Michailidis, G. Input perturbations for adaptive control and learning. Automatica 2020, 117, 108950. [Google Scholar] [CrossRef] [Green Version]
- TOMIN, N.; KURBATSKY, V.; GULIYEV, H. Intelligent control of a wind turbine based on reinforcement learning. In Proceedings of the 2019 16th Conference on Electrical Machines, Drives and Power Systems (ELMA), Varna, Bulgaria, 6–8 June 2019; pp. 1–6. [Google Scholar]
- Frades, J.L.; Negro, V.; Barba, J.G.; Martín-Antón, M.; López-Gutiérrez, J.S.; Esteban, M.D.; Blasco, L.J.M. Preliminary design for wave run-up in offshore wind farms: Comparison between theoretical models and physical model tests. Energies 2019, 12, 492. [Google Scholar]
- Oliver, J.; Esteban, M.; López-Gutiérrez, J.S.; Negro, V.; Neves, M. Optimizing wave overtopping energy converters by ANN modelling: Evaluating the overtopping rate forecasting as the first step. Sustainability 2021, 13, 1483. [Google Scholar] [CrossRef]
- Liu, A.; Zhao, H.; Song, T.; Liu, Z.; Wang, H.; Sun, D. Adaptive control of manipulator based on neural network. Neural Comput. Appl. 2021, 33, 4077–4085. [Google Scholar] [CrossRef]
- Richmond, M.; Sobey, A.; Pandit, R.; Kolios, A. Stochastic assessment of aerodynamics within offshore wind farms based on machine-learning. Renew. Energy 2020, 161, 650–661. [Google Scholar] [CrossRef]
- Wu, J.; Xu, X.; Liu, C.; Deng, C.; Shao, X. Lamb wave-based damage detection of composite structures using deep convolutional neural network and continuous wavelet transform. Compos. Struct. 2021, 276, 114590. [Google Scholar] [CrossRef]
- Brito, M.; Bernardo, F.; Neves, M.G.; Neves, D.R.C.B.; Crespo, A.J.C.; Domínguez, J.M. Numerical model of constrained wave energy hyperbaric converter under full-scale sea wave conditions. J. Mar. Sci. Eng. 2022, 10, 1489. [Google Scholar] [CrossRef]
- Oh, J.; Suh, K.D. Real-time forecasting of wave heights using EOF-wavelet-neural network hybrid model. Ocean Eng. 2018, 150, 48–59. [Google Scholar] [CrossRef]
- Deshmukh, A.N.; Deo, M.C.; Bhaskaran, P.K.; Nair, T.M.B.; Sandhya, K.G. Neural-network-based data assimilation to improve numerical ocean wave forecast. IEEE J. Ocean. Eng. 2016, 41, 944–953. [Google Scholar] [CrossRef]
- Zhang, Y.; Ma, H.; Xu, J. Neural network-based fuzzy vibration controller for offshore platform with random time delay. Ocean Eng. 2021, 225, 108733. [Google Scholar] [CrossRef]
- Ma, H.; Zhang, Y.; Wang, S.Q.; Xu, J.; Su, H. Rolling-optimized model predictive vibration controller for offshore platforms subjected to random waves and winds under uncertain sensing delay. Ocean Eng. 2022, 252, 111054. [Google Scholar] [CrossRef]
- Chen, W.; Du, X.; Zhang, B.L.; Cai, Z.; Zheng, Z. Near-Optimal control for offshore structures with nonlinear energy sink mechanisms. J. Mar. Sci. Eng. 2022, 10, 817. [Google Scholar] [CrossRef]
- Jahangiri, V.; Sun, C. Three-dimensional vibration control of offshore floating wind turbines using multiple tuned mass dampers. Ocean Eng. 2020, 206, 107196. [Google Scholar] [CrossRef]
- Li, H.J.; Hu, S.L.J.; Jakubiak, C. H2 active vibration control for offshore platform subjected to wave loading. J. Sound Vib. 2003, 263, 709–724. [Google Scholar] [CrossRef]
- Sabir, Z.; Raja, M.A.Z.; Mahmoud, S.R.; Balubaid, M.; Algarni, A.; Alghtani, A.H.; Aly, A.A.; Le, D.N. A novel design of Morlet wavelet to solve the dynamics of nervous stomach nonlinear model. Int. J. Comput. Intell. Syst. 2022, 15, 1–15. [Google Scholar] [CrossRef]
- Yang, C.; Yang, R.; Xu, T.; Li, Y. Computational model of enterprise cooperative technology innovation risk based on nerve network. J. Algorithms Comput. Technol. 2018, 12, 177–184. [Google Scholar] [CrossRef]
- Chamon, L.; Ribeiro, A. Probably approximately correct constrained learning. Adv. Neural Inf. Process. Syst. 2020, 33, 16722–16735. [Google Scholar]
- Fang, Z.; Lu, J.; Liu, F.; Zhang, G. Semi-supervised heterogeneous domain adaptation: Theory and algorithms. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 45, 1087–1105. [Google Scholar] [CrossRef]
- Ma, H.; Hu, W.; Tang, G.Y. Networked predictive vibration control for offshore platforms with random time delays, packet dropouts and disordering. J. Sound Vib. 2019, 441, 187–203. [Google Scholar] [CrossRef]
- Ma, H.; Tang, G.Y.; Ding, X.Q. Modified-transformation-based networked controller for offshore platforms under multiple outloads. Ocean Eng. 2019, 190, 1–11. [Google Scholar] [CrossRef]
- Chen, L.; Jagota, V.; Kumar, A. Research on optimization of scientific research performance management based on BP neural network. Int. J. Syst. Assur. Eng. Manag. 2021. [Google Scholar] [CrossRef]
- Su, G.; Wang, P.; Guo, Y.; Cheng, G.; Wang, S.; Zhao, D. Multiparameter identification of permanent magnet synchronous motor based on model reference adaptive system—Simulated annealing particle swarm optimization algorithm. Electronics 2022, 11, 159. [Google Scholar] [CrossRef]
- Aljuboury, A.S.; Hameed, A.H.; Ajel, A.R.; Humaidi, A.J.; Alkhayyat, A.; Mhdawi, A.K.A. Robust adaptive control of knee exoskeleton-assistant system based on nonlinear disturbance observer. Actuators 2022, 11, 78. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Symbol | Value | Unit |
|---|---|---|---|
| Significant wave height | 5 | m | |
| Peak frequency | 0.79 | rad/s | |
| Water depth | d | 218 | m |
| Pile cylinder | D | 1.83 | m |
| Height of platform | L | 249 | m |
| First modal mass | 7,825,307 | kg | |
| Nominal value of natural frequency (platform) | 2.0446 | rad/s | |
| Nominal value of damping ratio (platform) | 2% | - | |
| AMD device mass | 78,253 | kg | |
| Nominal value of natural frequency (AMD) | 2.0074 | rad/s | |
| Nominal value of damping ratio (AMD) | 20% | - | |
| Drag coefficient | 1.0 | - | |
| Inertia coefficient | 1.5 | - | |
| Atmospheric density | 1.23 | - | |
| Windward resistance coefficient | 1.01 | - |
| Positive Errors | Negative Errors | |
|---|---|---|
| BPNN | 80.77% | Less than 20% |
| WNN | 61.79% | 38.21% |
| (m) | (m) | |||||
|---|---|---|---|---|---|---|
| No control | - | 0.0436 | 0.1317 | - | 0.1182 | 0.3818 |
| MRAC | 14.785 | 0.0571 | 0.2365 | 71.996 | 0.2450 | 0.9797 |
| MRAC(1-300s) | 5.8586 | 0.0237 | 0.0883 | 21.388 | 0.0891 | 0.3379 |
| WNNAC | 1.5257 | 0.0151 | 0.0461 | 7.5821 | 0.0498 | 0.1546 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Ma, H.; Xu, J.; Su, H.; Zhang, J. Model Reference Adaptive Vibration Control of an Offshore Platform Considering Marine Environment Approximation. J. Mar. Sci. Eng. 2023, 11, 138. https://doi.org/10.3390/jmse11010138
Zhang Y, Ma H, Xu J, Su H, Zhang J. Model Reference Adaptive Vibration Control of an Offshore Platform Considering Marine Environment Approximation. Journal of Marine Science and Engineering. 2023; 11(1):138. https://doi.org/10.3390/jmse11010138
Chicago/Turabian StyleZhang, Yun, Hui Ma, Jianliang Xu, Hao Su, and Jing Zhang. 2023. "Model Reference Adaptive Vibration Control of an Offshore Platform Considering Marine Environment Approximation" Journal of Marine Science and Engineering 11, no. 1: 138. https://doi.org/10.3390/jmse11010138