The maximum pressure of full-ocean-depth can reach 110 MPa. Compared with the working depth of 3000–6000 m, the viscosity of the working oil will be significantly increased. The resulting influence, on the one hand, will increase the loss caused by the viscous resistance, such as the oil friction loss of the motor, and the pressure loss along the pipeline. On the other hand, it will also have an impact on the working characteristics of the system, such as hydraulic efficiency, valve port pressure-flow characteristics, etc.
3.1. Motor Efficiency
Compared with atmospheric motors, the rotors of deep-sea oil-filled motors are subject to additional viscous resistance imposed by the oil. Therefore, the power transfer process of the motor can be expressed as:
where,
is the active power input to the motor;
is the electromagnetic power of the motor;
is the copper loss of the motor stator;
is the iron loss of the motor;
is the oil friction loss caused by the viscous friction between the rotor and the oil;
is the mechanical power output to the pump.
The motor’s copper loss is mainly related to the armature current, and is not affected by the ambient pressure. The motor’s iron loss is mainly related to the material, magnetic field frequency, etc. The high ambient pressure will affect the material’s magnetic properties and increase the iron loss [
20]. However, under the same ambient pressure, iron loss can also be considered as a fixed loss. Under oil lubrication, the mechanical friction is negligible compared to the viscous friction. Therefore, it is necessary to analyze the motor’s oil friction loss to explore the influence of the high ambient pressure on the motor efficiency.
3.1.1. Calculation of Oil Friction Loss
The oil friction loss of the motor is related to the oil flow pattern.
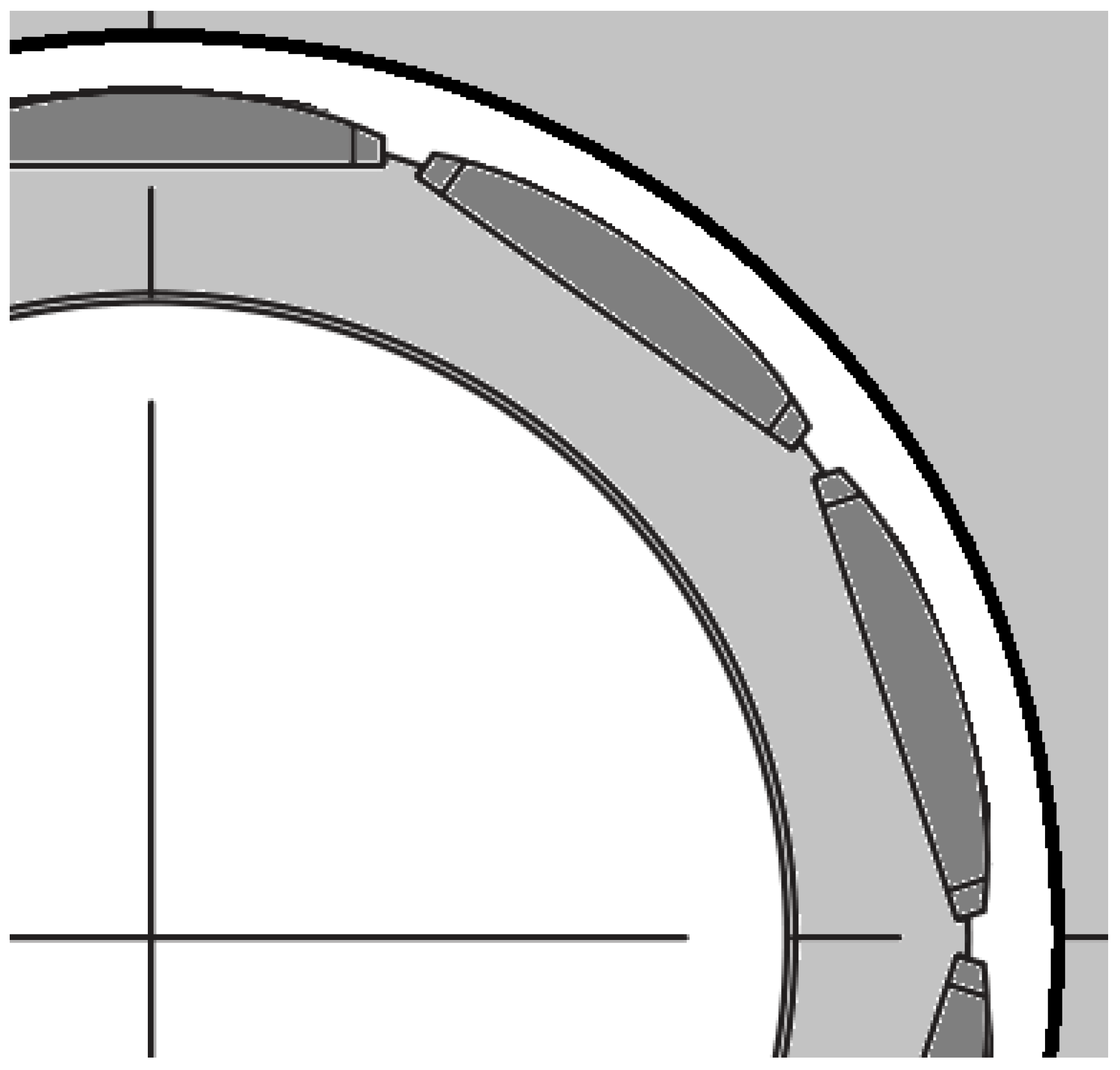
Figure 9 is the partial enlarged detail of the axial view of the motor. The stator is encapsulated, and the inner surface is close to the smooth surface. Due to the periodic arrangement of permanent magnets, the outer surface of the rotor presents a groove shape. Therefore, the oil flow pattern in the gap is not a simple annular gap flow.
For the rotor with an uneven surface, the accurate flow of oil is usually obtained by finite element calculation. Suppose the rotor surface is smooth, that is, there is a smooth cylinder gap between the rotor and the stator. In fluid mechanics, the viscous fluid in the rotating cylindrical gap is defined as Taylor-Couette Flow. When the angular velocity is low, it can be known that the fluid is stable by measuring the Reynolds number. This state is called annular Couette flow. According to Couette’s research, the Reynolds number can be calculated by the following:
where
is the Reynolds number;
is the rotational angular velocity of the rotor;
is the radius of the outer cylinder;
is the radius of the inner cylinder;
is the kinematic viscosity.
Taylor [
20] proposed in the stability study of Couette flow that when the Reynolds number of the viscous fluid exceeds a certain critical value, the laminar flow pattern becomes unstable and enters the second stable state, that is, an axisymmetric annular vortex appears, which is called Taylor vortex. The critical Reynolds number of laminar instability can be calculated by Formula (7). Where P is the judgment condition of whether the oil state is unstable. Further, when
is very small, the dimensionless Taylor number can be defined by Equation (8) [
21].
when the Reynolds number continues to increase, the flow pattern of the viscous fluid will go through several stages such as Taylor traveling waves and modulated rotating waves, and then enter the turbulent state. Early scholars conducted a detailed experimental study on the flow pattern of Taylor-Couette flow at different Reynolds numbers. The experimental results and photos show that the critical Reynolds number of each stage is very dependent on the cylinder radius ratio
. Di Prima and Swinney [
22] proposed an empirical formula for the torque applied on the inner cylinder when the viscous fluid was turbulent. The Taylor number in turbulent flow is about 12 times the critical Taylor number.
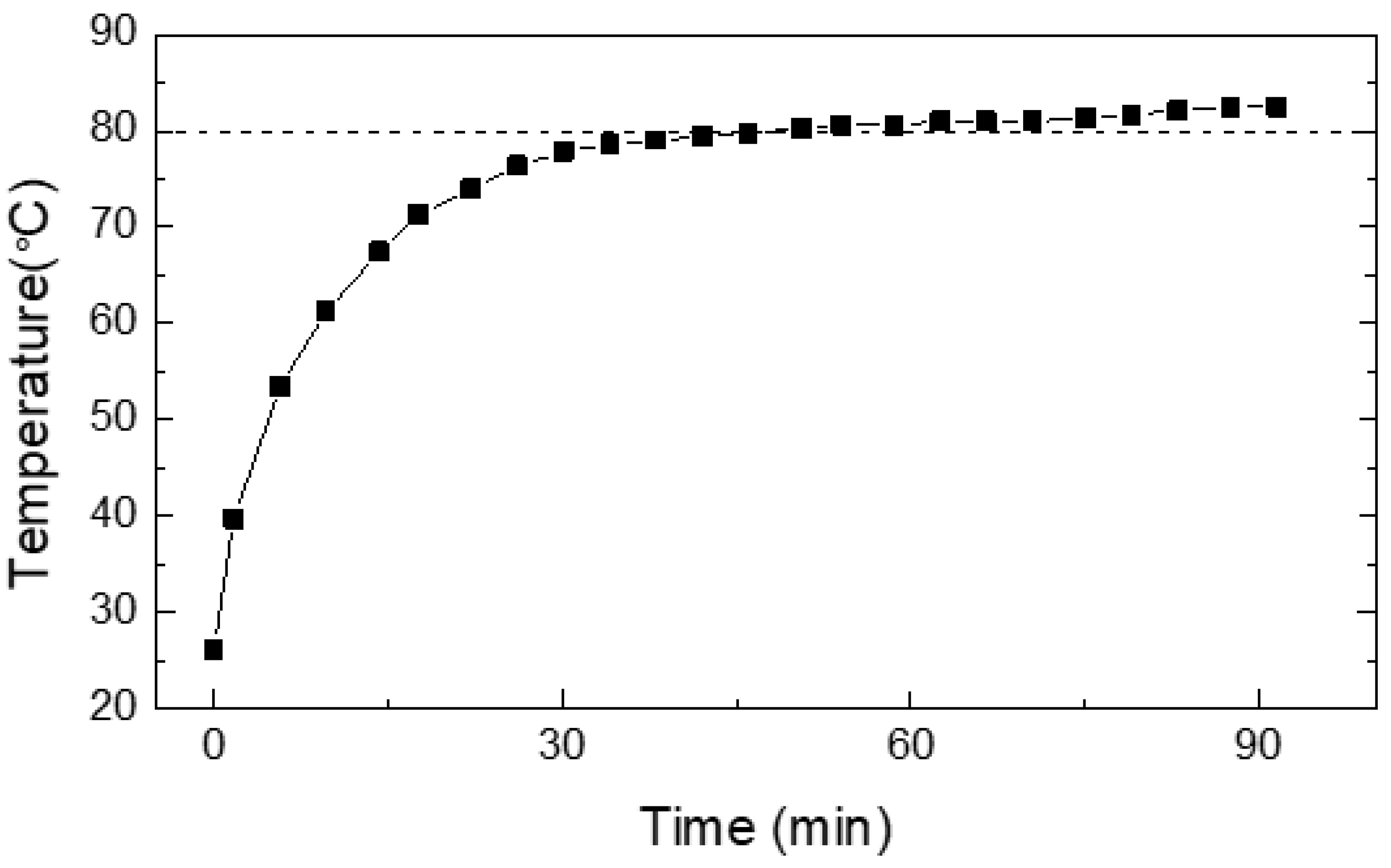
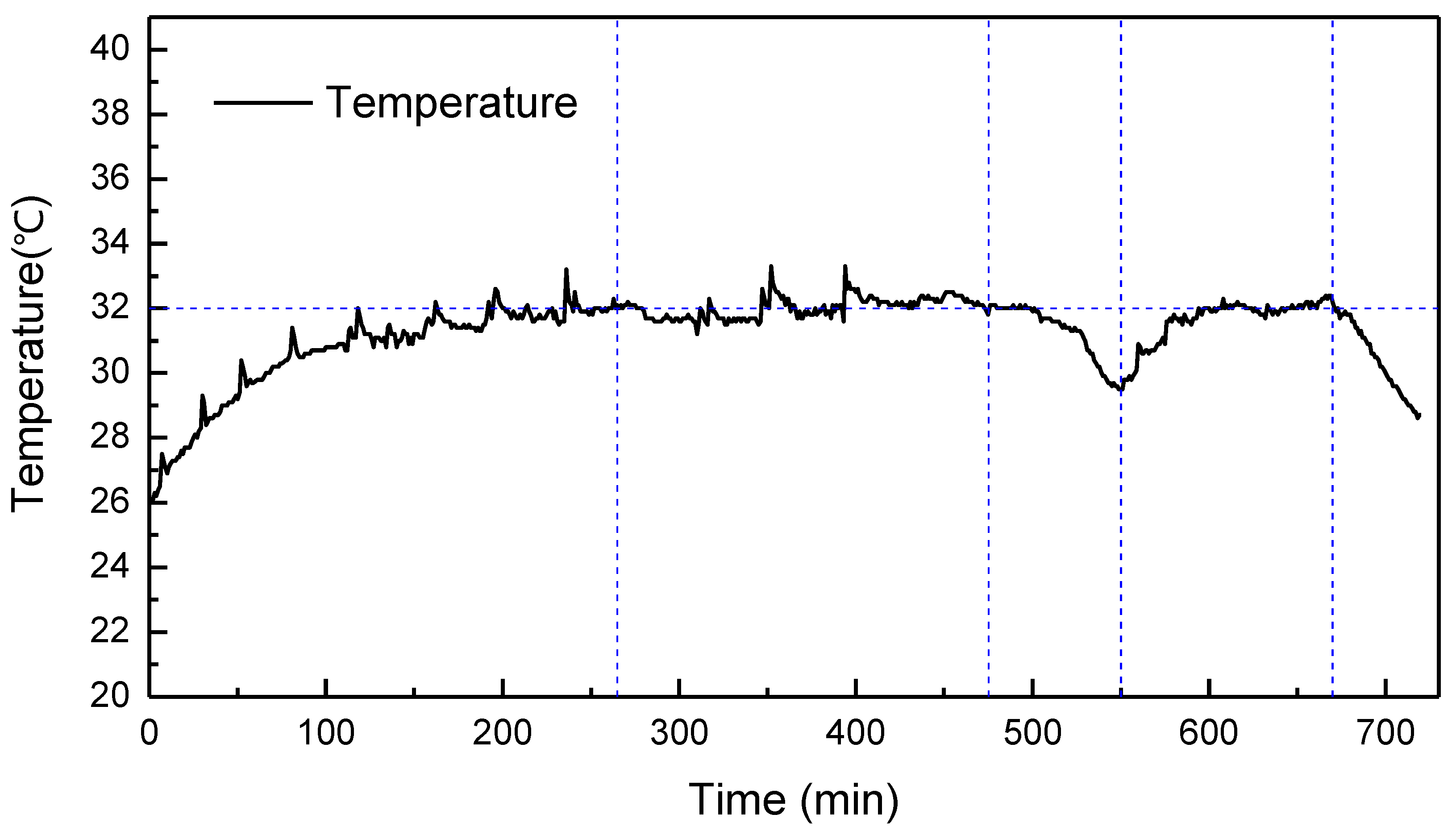
The temperature rise curve of the motor cylinder is shown in
Figure 5, and the oil temperature gradually rises from 26 °C to 80 °C.
Table 4 is the pressure-kinematic viscosity data of No. 5 hydraulic oil at 26 °C. Taking the motor’s structure size into Equation (8), the motor speed range corresponding to different flow states can be obtained, as shown in
Table 5.
The rated speed of the motor is 2000 rpm. According to
Table 5, at the rated speed, the oil in the motor gap is in the transient flow pattern. When the motor is at a lower speed, the friction torque can be calculated by Equation (9).
In the laminar flow pattern, the velocity gradient is linearly distributed along the radial direction. When the viscous fluid is in the Taylor vortex state, Stuart calculated the characteristics of the flow pattern and obtained the calculation method of the velocity gradient. As shown in Equation (10), where
is a fixed value.
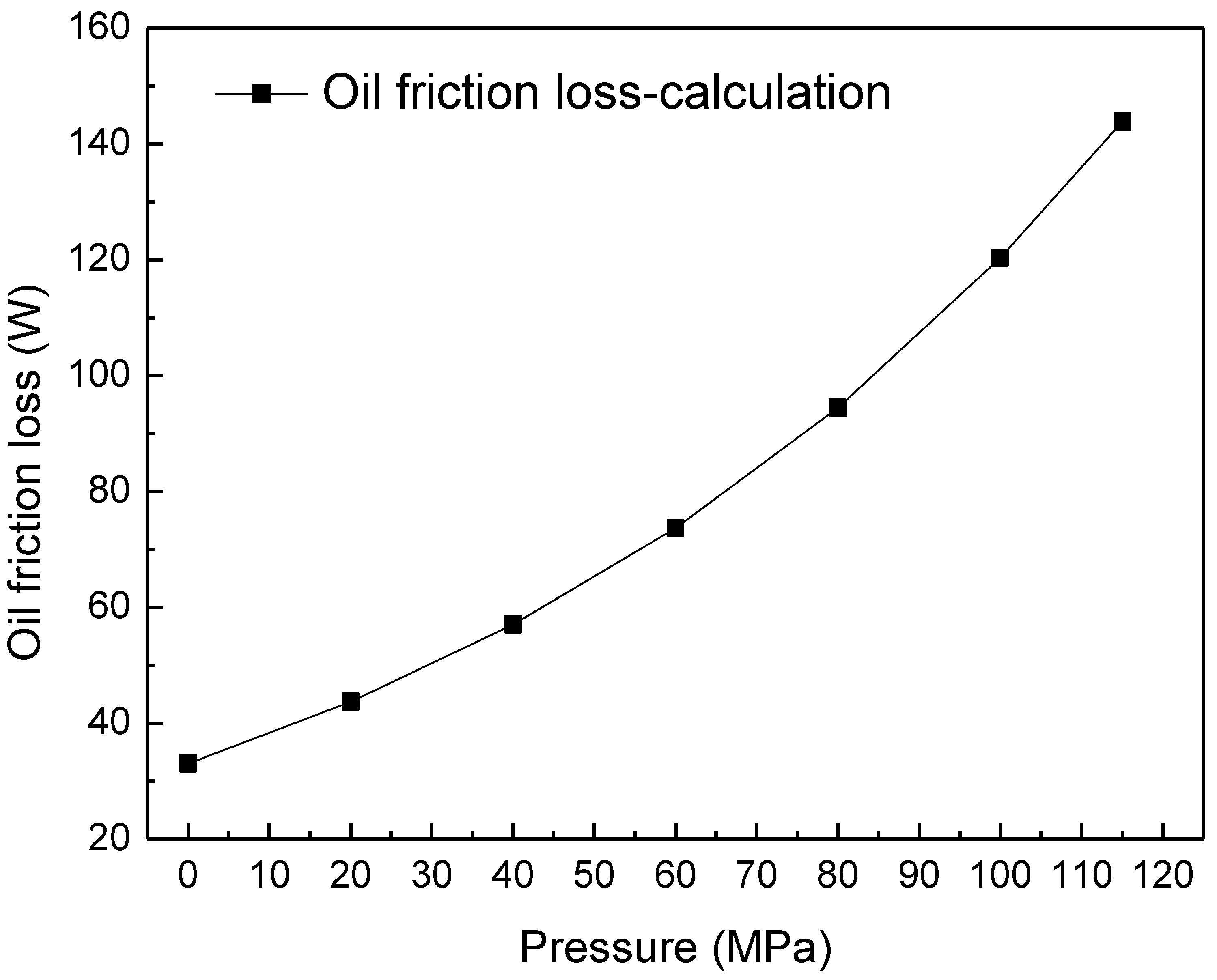
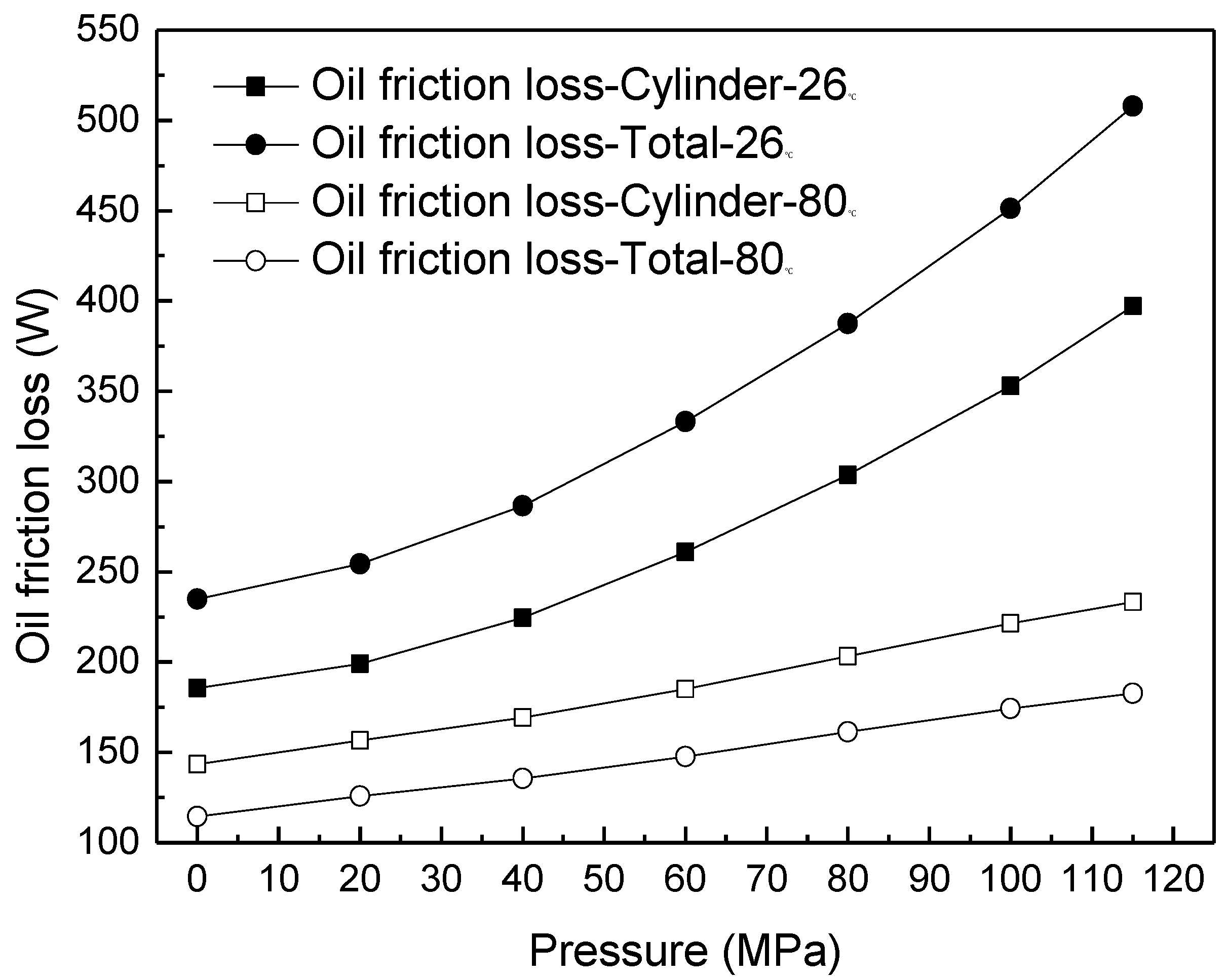
The friction torque on the smooth cylindrical surface can be calculated from the above equation. After determining the rotational speed of the rotor, the oil friction loss caused by viscous friction can be obtained. Bringing the motor structure size into the equation, the oil friction loss under different ambient pressures can be calculated, as shown in
Figure 10. When the oil temperature remains constant, the oil friction loss of the inner rotor increases with the increase of the ambient pressure.
3.1.2. Simulation of Oil Friction Loss
The Taylor-Couette flow studies the annular gap between two rotating cylinders. For oil-immersed motors, the gap between the rotor end surface and the inner wall is also filled with hydraulic oil. Therefore, when calculating the oil friction loss of the motor, it is necessary to calculate the total friction torque of the cylinder surface and the two end surfaces.
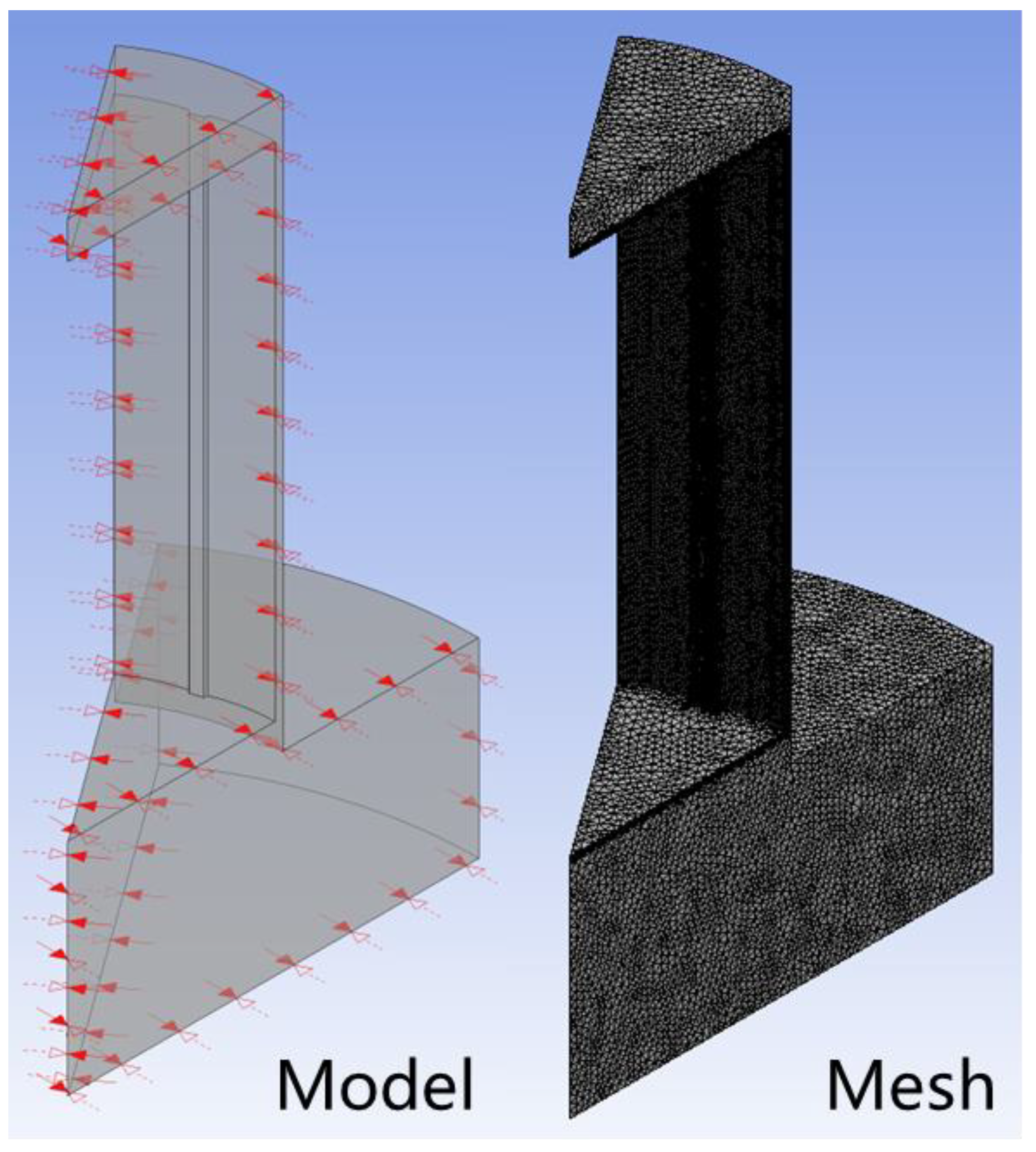
The simplified motor is modeled by the finite element simulation software ANSYS Workbench. The inner surface of the motor is simplified into two coaxial cylinders of different sizes, and the calculated flow field is the closed area formed by the two cylindrical surfaces. Since there is no oil exchange with the valve box, there is no inlet and outlet for the flow field in the model.
The flow field was meshed using the “Tetrahedrons” tetrahedral meshing method. Since the model is a simple geometry, the “Patch Conforming” mesh mapping method based on the “TGRID” algorithm is used to generate the volume mesh from the surface mesh. The mesh encryption scheme is shown in
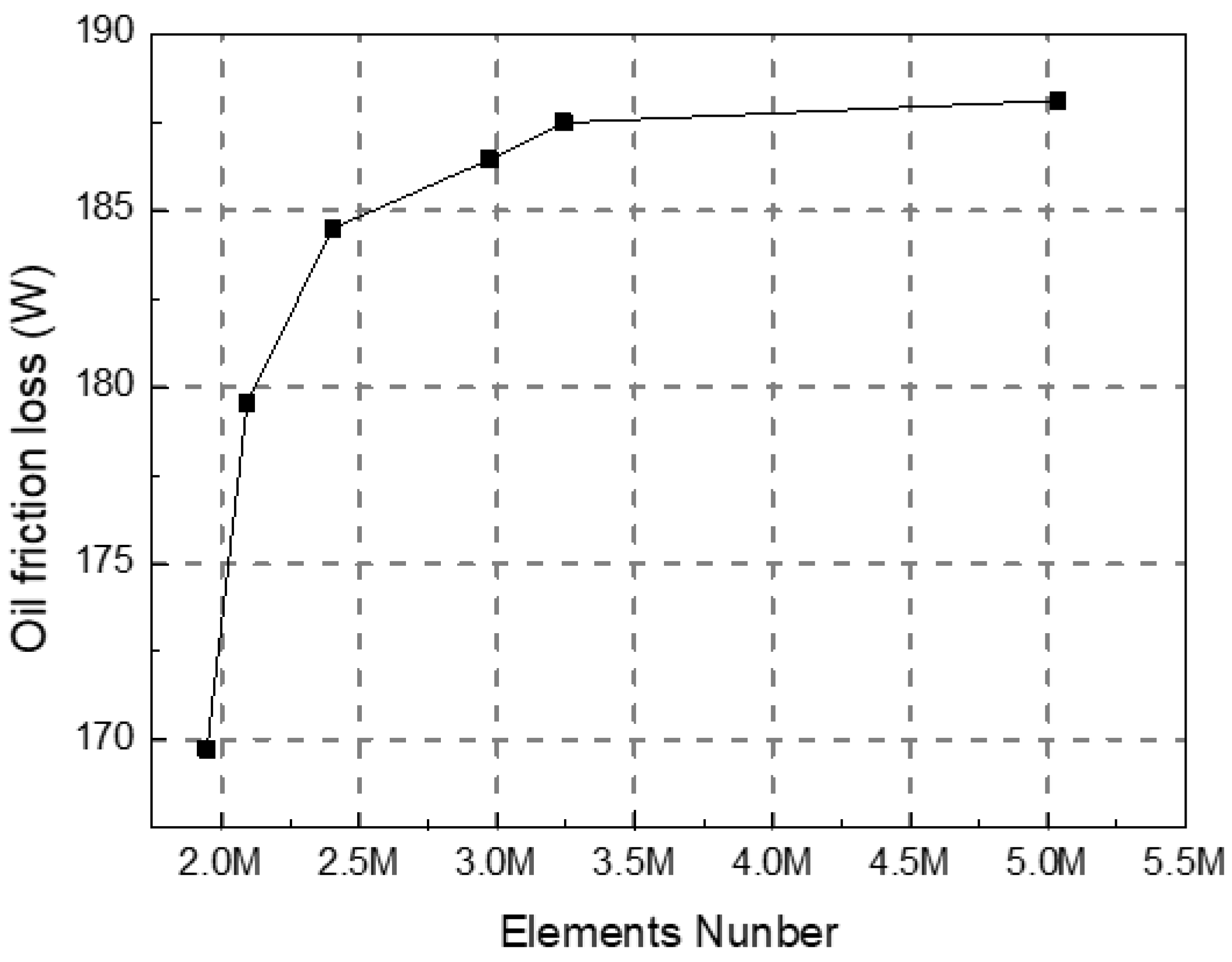
Table 6. The “Inflation” refinement method was applied to the flow field within a cylindrical gap of approximately 2 mm. The oil friction loss calculated by different mesh refinement models is shown in
Figure 11. When the mesh number exceeds 3.3 M, the variation rate of simulation results is about 0.5%. Therefore, simulations were performed using the fifth set of mesh refinement schemes.
Import the mesh data into CFX, and set the material properties according to the pressure-viscosity data calculated above. Fixed the outer surface, applied rotation speed of 2000 rpm on the inner surface. The “Shear Stress Transport” turbulence model was selected to calculate the friction torque of the inner rotor under different oil viscosity conditions.
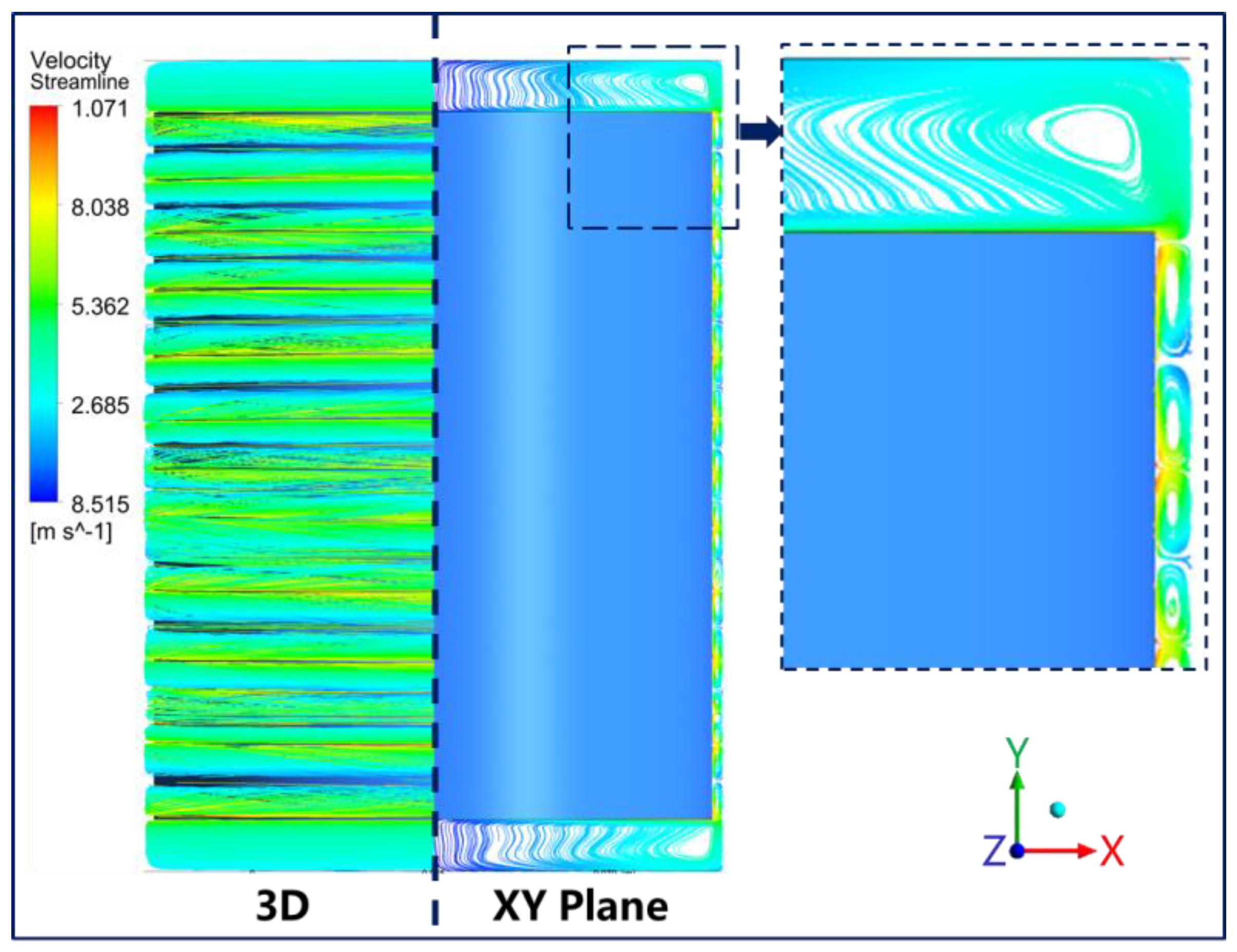
The simulation results are shown in
Figure 12. Taking the simulation results when the ambient pressure is 100 MPa as an example, the flow field in the cylindrical gap is in the state of transient flow, which presents a periodic vortex. The left side of
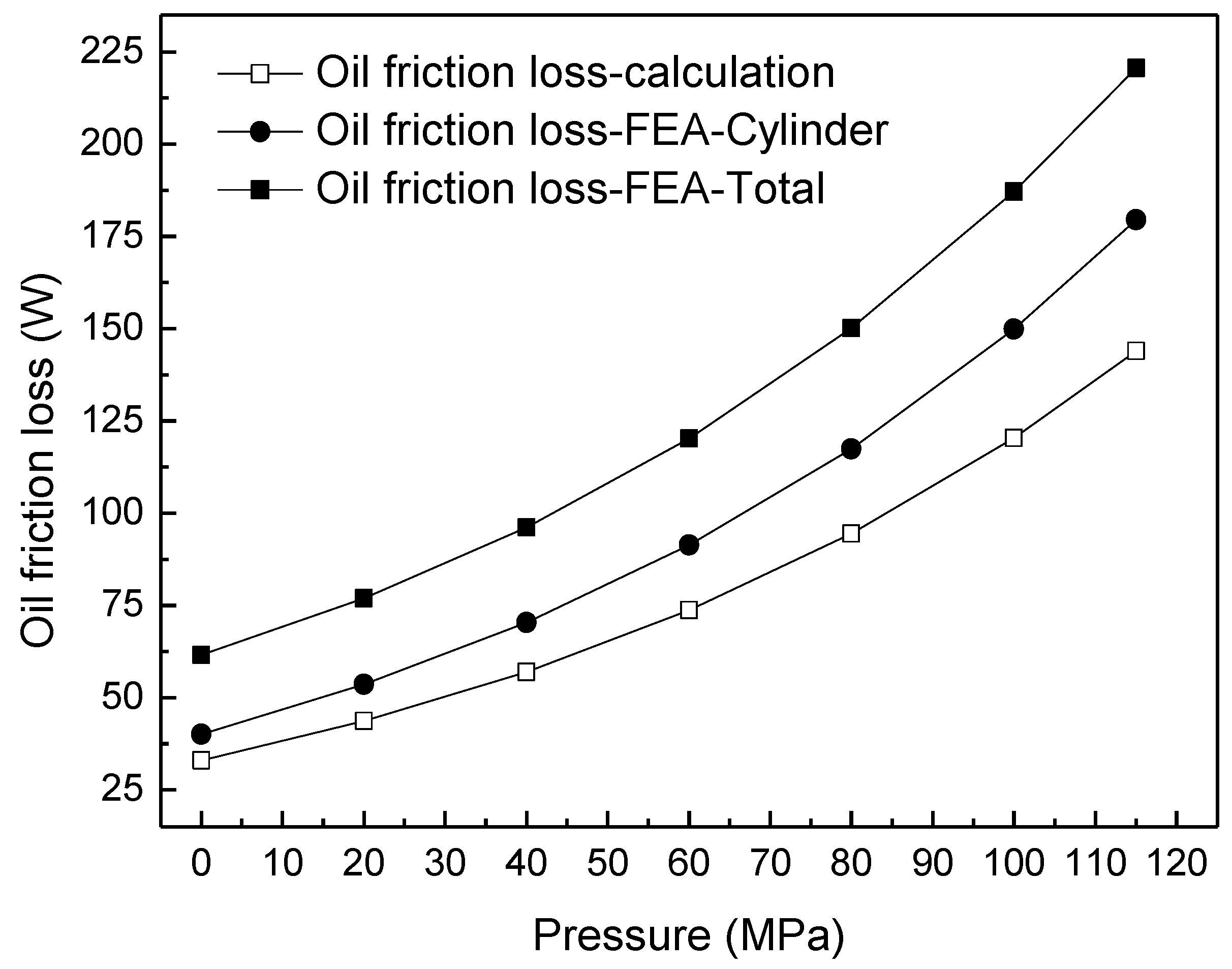
Figure 12 is the 3D flow field obtained from the simulation, and the right side is the surface streamline on the XY cross-section and a partial enlarged view. It can be seen from the enlarged figure that under the effect of centrifugal force, the flow field on the end surface is in turbulent state, and a small part of it invades the cylindrical gap. The torque of each rotor surface along the Y axis was read through CFX-post, and the oil friction loss of each surface was calculated, as shown in
Figure 13. The three curves represent: the theoretical values calculated by Equation (9), the simulation values of the cylindrical surface and the entire rotor surface simulated by the CFX. Affected by the flow field on the upper and lower end faces of the rotor, the oil friction loss on the cylindrical surface is slightly larger than the theoretical calculation result.
Further, the actual motor rotor model is simulated. The actual motor rotor consists of 10 groups of uniformly distributed permanent magnets. In order to reduce the computing time and improve the quality of the mesh, a partial model of the motor is established.
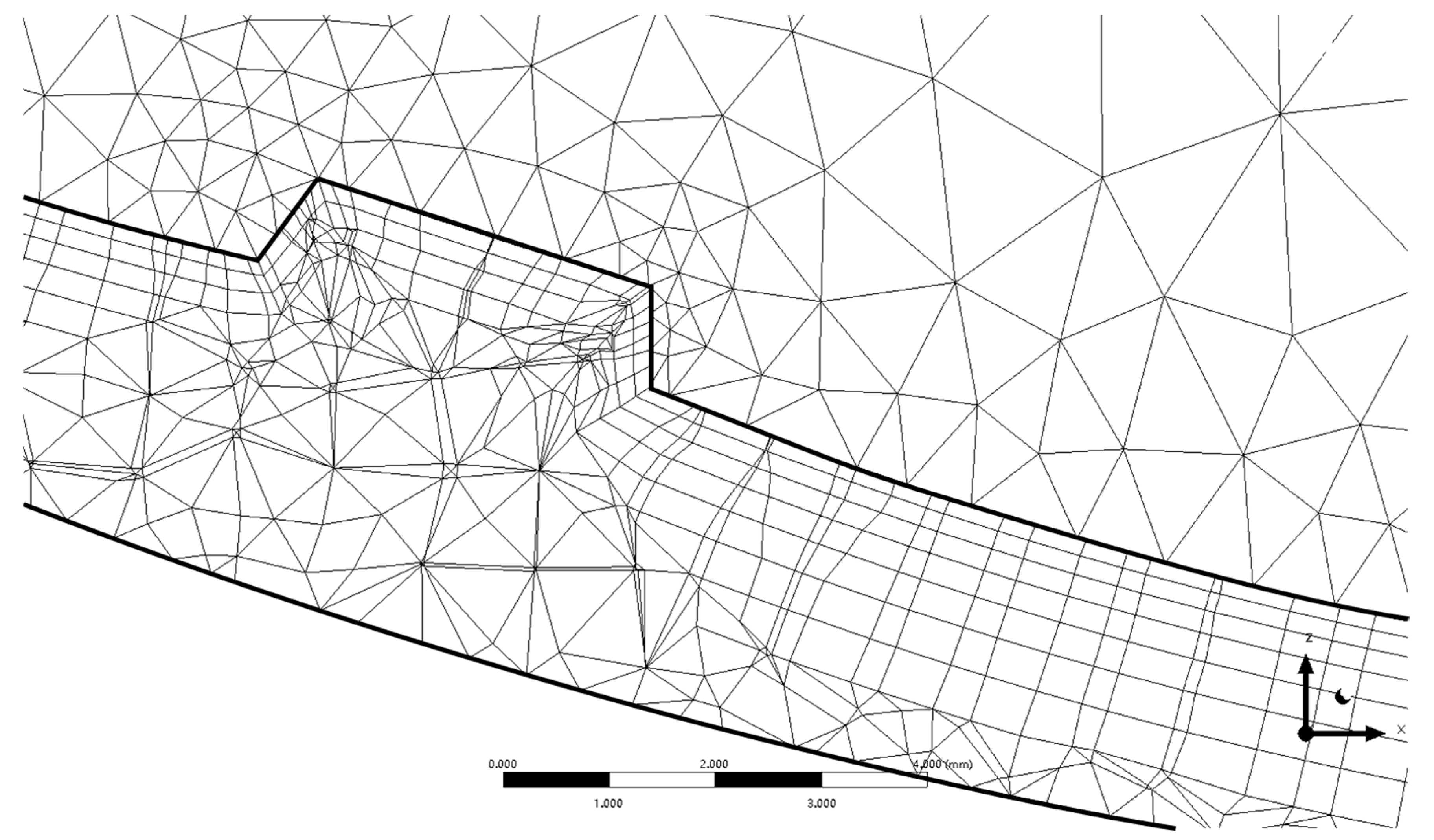
The flow field was also meshed using the “Tetrahedrons” tetrahedral meshing method. Due to the complexity of the model, the “Patch Conforming” mesh mapping method based on the “ICEM CFD Tetra” algorithm is used to generate the surface mesh from the volume mesh. The meshing results are shown in
Figure 14, and
Figure 15 shows the cross-section perpendicular to the Y axis. The mesh encryption scheme is shown in
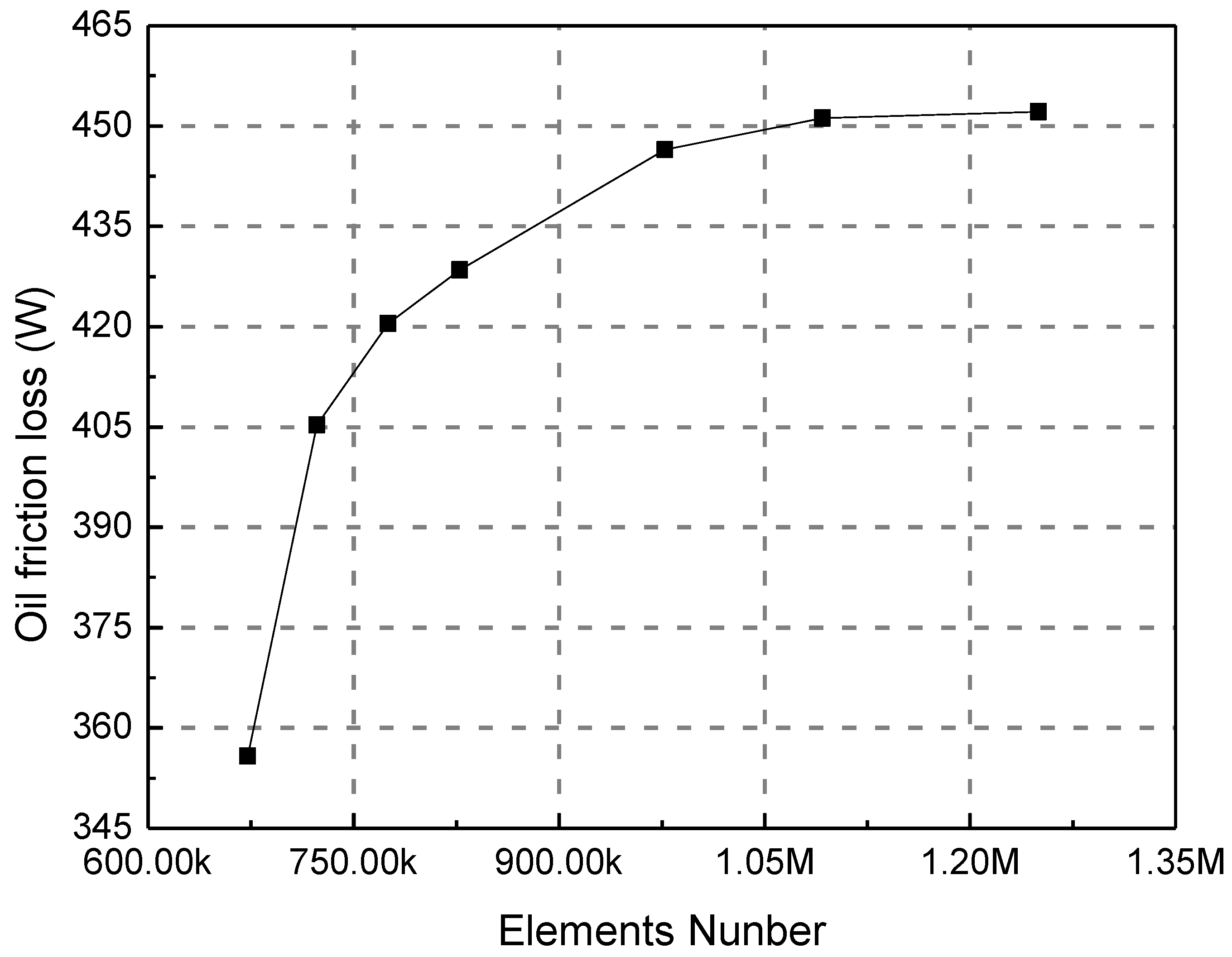
Table 7. The oil friction loss calculated by different mesh refinement models is shown in
Figure 16. When the mesh number exceeds 1.1 M, the variation rate of simulation results is about 0.5%. Therefore, simulations were performed using the sixth group of mesh refinement schemes.
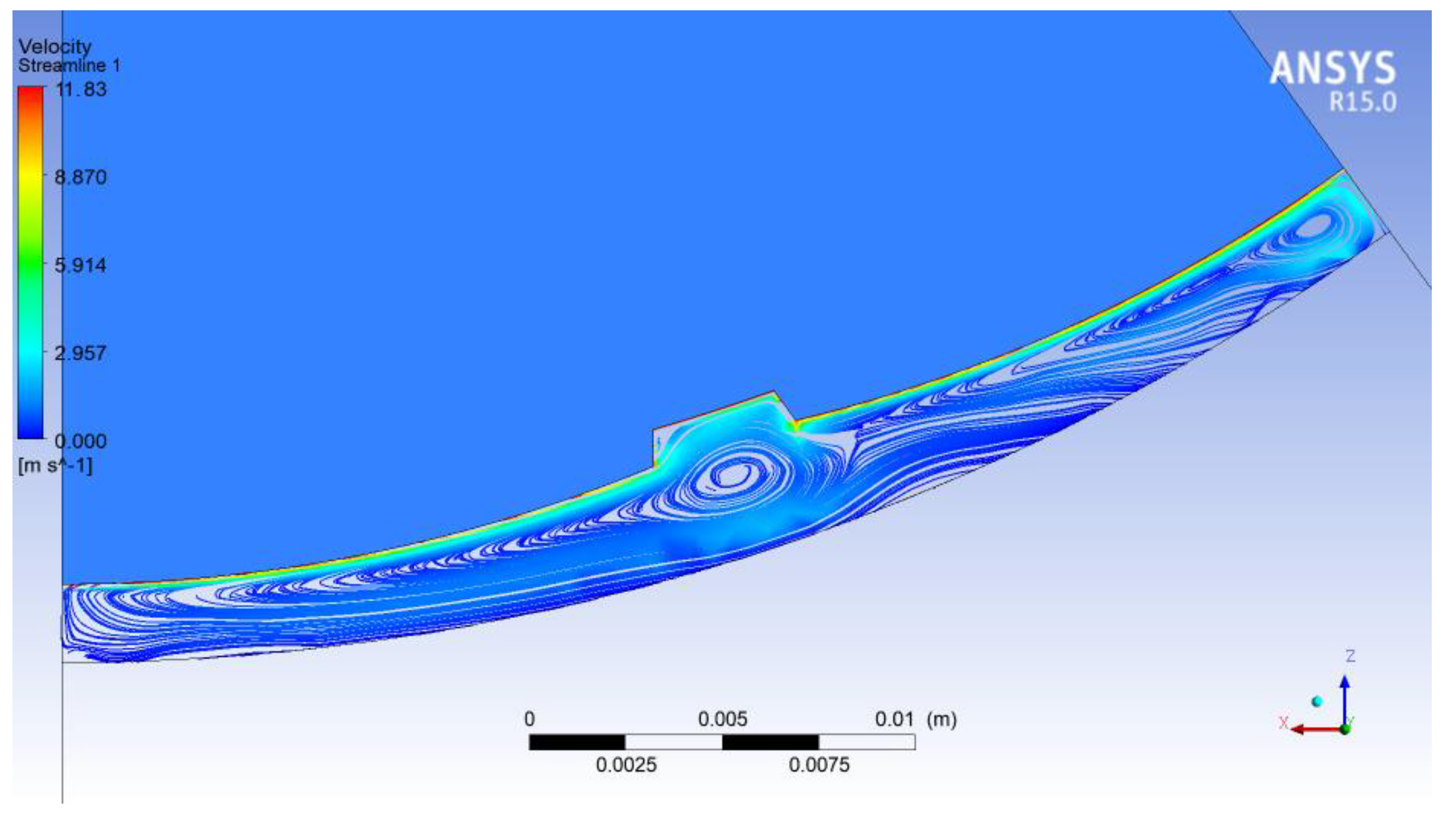
The simulation parameters are the same as before, using the “Shear Stress Transport” turbulence model and applying “Symmetry” on the cross section of the flow field. The simulation results are shown in
Figure 17. Affected by the groove, there is no periodic eddy current in the annular gap, and the viscous fluid moves irregularly in the radial direction. The oil flow pattern at this time conforms to the characteristics of turbulent flow, that is, the groove has a great influence on the oil flow pattern in the cylindrical gap.
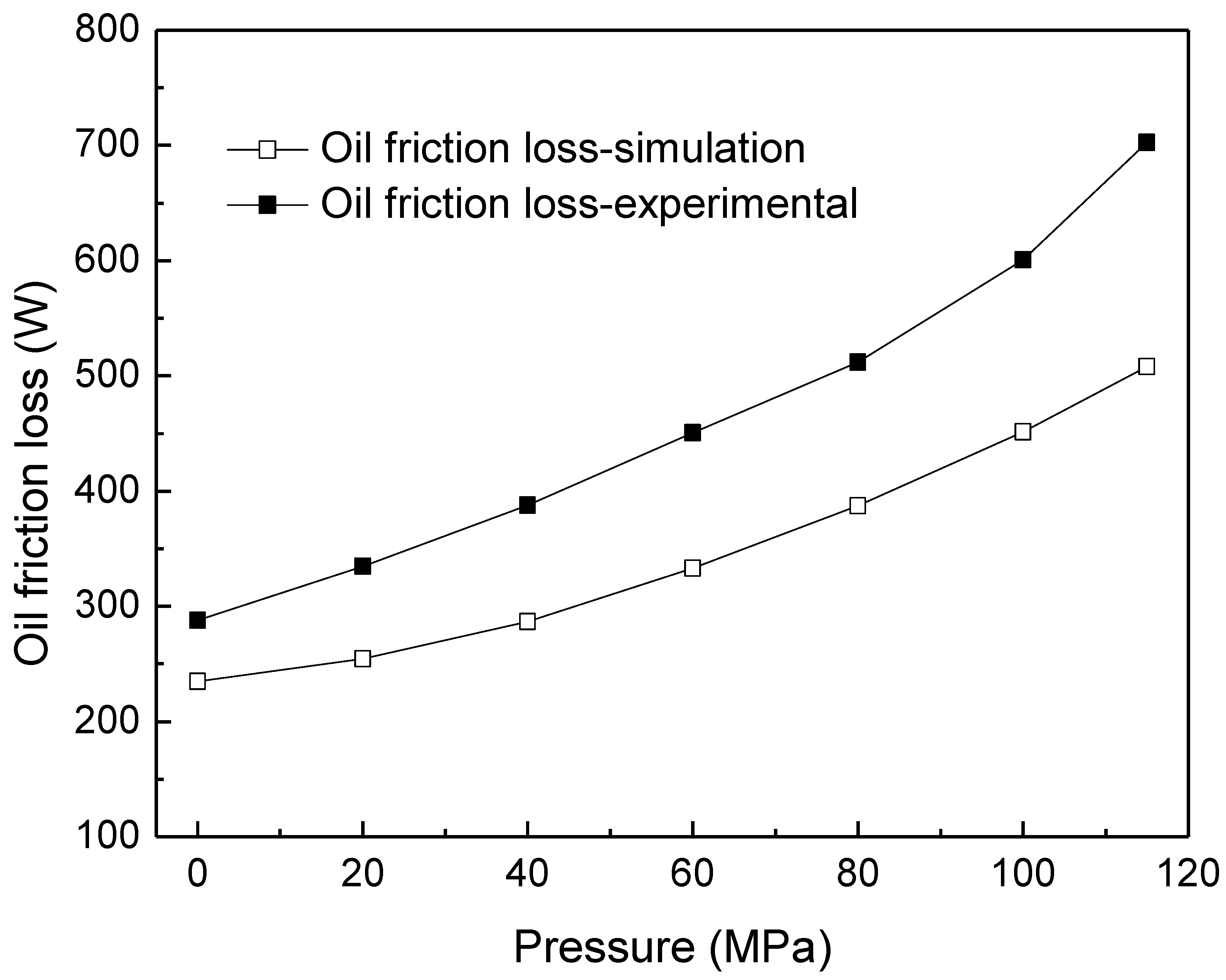
Specifically, the curve of motor oil friction loss with ambient pressure is shown in
Figure 18. As the ambient pressure increases, the oil friction loss of the motor increases gradually. That is, when driving the same load, the overall efficiency of the motor is gradually reduced.
Compared with the simulation results of the simplified model, under the same oil temperature, the oil friction loss of the detailed model increases significantly. It means that the grooves on the rotor surface will disturb the flow field and also have a great influence on the oil friction loss. Comparing the simulation results at different temperatures, when the oil temperature increases, the oil friction loss decreases. Therefore, the temperature in the motor barrel can be appropriately increased to reduce the oil friction torque, and improve the efficiency of the oil-filled motor.
3.2. Pump Efficiency
The pressure compensator balances the internal pressure and the ambient pressure, so the commercially available hydraulic component can work normally in the deep sea high pressure environment. However, as the ambient pressure increases, the fluid properties change. When the hydraulic pump squeezes the oil and converts the mechanical energy into hydraulic energy, the change of the oil characteristics will directly affect the working characteristics of the pump.
In this paper, the external gear pump is selected, which is a positive displacement pump. It has a simple structure and high reliability, and is suitable for working in a complex environment. However, compared with piston pump, vane pump, etc., the internal leakage is relatively large. Therefore, when the load pressure is consistent, the efficiency of the gear pump is affected by both the hydro-mechanical efficiency
and the volumetric efficiency
. The specific pump efficiency can be expressed as:
where,
is the mechanical energy input from the motor;
is the hydraulic-mechanical power loss;
is the power loss caused by oil leakage;
is the output power of pump.
(1) Volumetric efficiency
The internal flow loss of the gear pump mainly comes from the gear end clearance, radial clearance and gear meshing. The volumetric efficiency of a gear pump can be expressed by the following equation:
where,
is the theoretical flow, which equals to the rated displacement times rotational speed;
is the output flow of the pump outlet;
is the internal leakage flow.
The leakage flow from the end surface clearance accounts for about 80% of the total, and can be calculated by Equation (13).
In Equation (13), end surface clearance s, dedendum circle radius , gear shaft radius are the structural dimensions of the gear pump, and the pressure difference between the high pressure chamber and the bearing chamber is determined by the actual load condition. Therefore, when the load pressure is consistent, the leakage from the high pressure chamber is negatively correlated with the dynamic viscosity of oil. That is, when the ambient pressure increases, the internal leakage of gear pump will decrease.
(2) Hydro-mechanical efficiency
Friction loss of gear pump mainly includes mechanical friction between the pump shaft and bearing, and viscous friction between the gear and oil. In good lubrication, mechanical friction can be ignored compared with viscous friction. Hydraulic—mechanical efficiency of gear pumps can be expressed as follows:
where,
is the frictional power loss,
is the input torque of the gear pump,
is the torque loss due to friction, and
is the corresponding pressure value calculated from the lost torque.
The viscous friction loss of the gear pump mainly includes: the viscous friction loss between addendum circle and the oil, and between gear end face and the oil. According to Newton’s viscous fluid friction law [
23], the frictional shear stress
τ on the contact surface between gear and oil can be calculated by Equation (15).
where,
is the oil velocity relative to the contact surface;
is the oil velocity gradient in the normal direction of the contact surface.
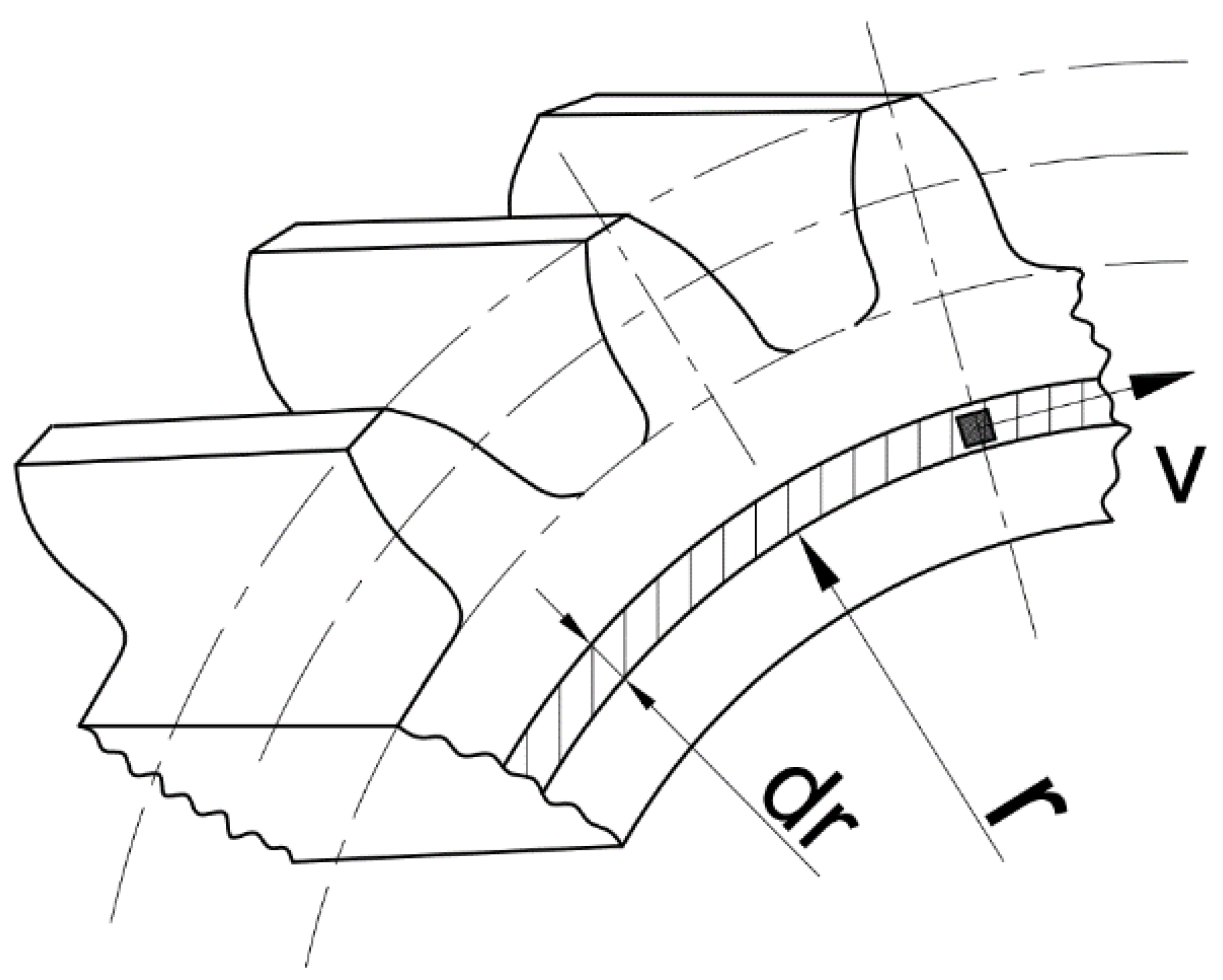
The frictional shear stress on the end face of the addendum circle and the side face of the gear is theoretically deduced, and the hydro-mechanical loss of the gear pump can be further obtained, that is, Equation (16).
where,
is the dynamic viscosity of the oil;
is the viscous friction loss on the addendum circle surface;
is the viscous friction loss on the gear’s side surface;
is the area of the contact surface, and
is the linear velocity. Taking
Figure 19 as an example, on the side surface of the gear,
;
.
According to the derived Equations (12)–(16), it can be known that in the deep-sea high-pressure environment, with the increase of oil viscosity, the internal leakage flow of the pump decreases, and the frictional power loss increases. The volumetric efficiency and mechanical efficiency of the pump have opposite trends. Therefore, it is necessary to bring in the actual structural data to obtain the specific variation curve of the gear pump efficiency.
The gear pump selected in this article is Rexroth’s AZPF external gear pump, with a rated displacement of 8.0 cm
3/rev. The load conditions are assumed to be the same, that is, the pump output pressure
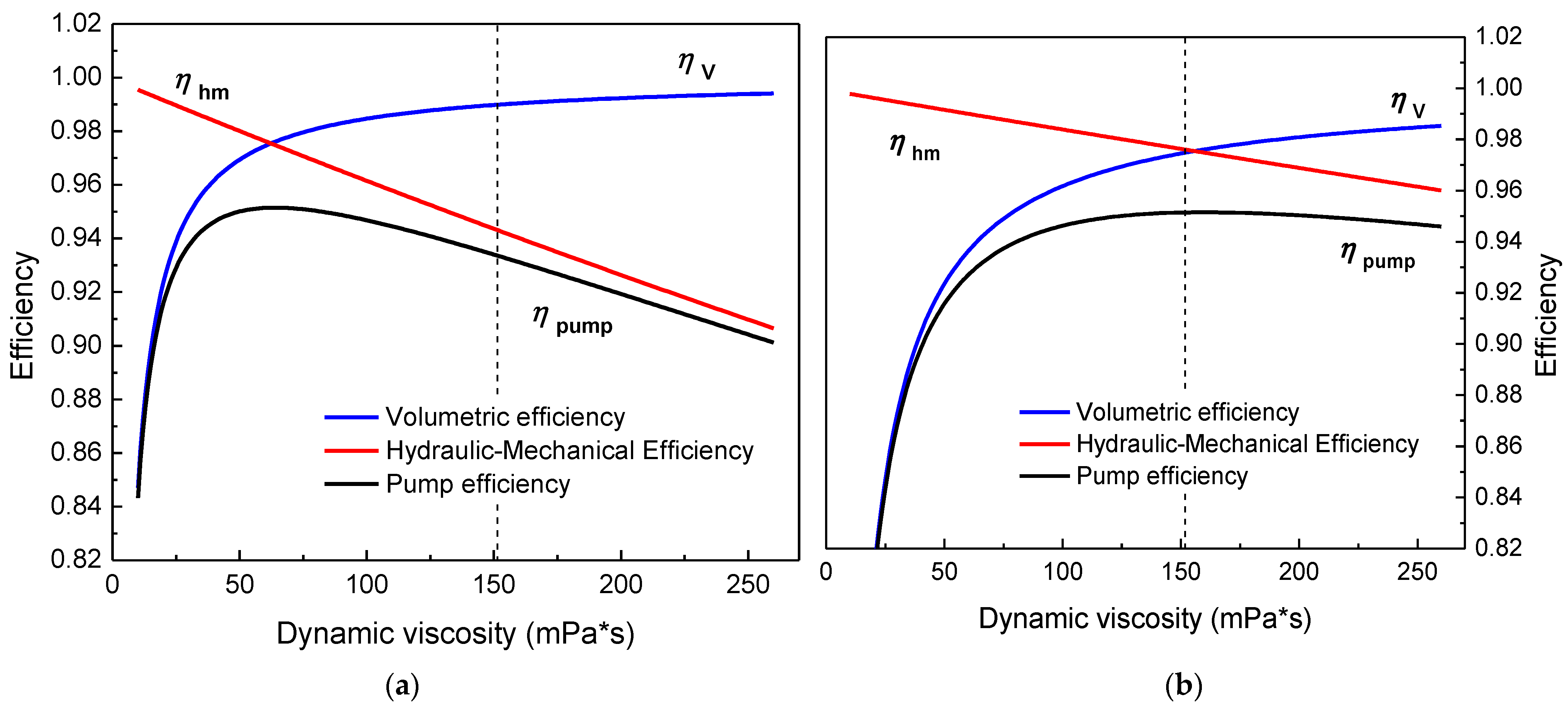
remains the same. Bring in structural data, and the volumetric efficiency and mechanical efficiency as a function of oil viscosity were calculated. The variation curves of pump efficiency when the motor speed is 2000 rpm and the load pressure are 6 MPa and 15 MPa respectively are calculated, as shown in
Figure 20.
It can be seen from
Figure 20 that when the load pressure is consistent, the hydraulic mechanical efficiency decreases approximately linearly with the increase of the oil viscosity. For the volumetric efficiency of the gear pump, as the oil viscosity increases, the volumetric efficiency first increases rapidly, and then slowly approaches 1. That is, when the oil viscosity is low, the internal leakage flow of the gear pump is more sensitive to the change of oil viscosity.
The variation curve of gear pump efficiency can be obtained by Equation (11): with the increase of oil viscosity, the pump efficiency first increases and then gradually decreases. Analyze the reason: (1) when the oil viscosity is low, the viscous frictional resistance of the gear is almost negligible relative to the input torque of the pump. At the same time, the rapid decrease of the internal leakage flow makes the overall efficiency of the pump continue to increase. (2) As the oil viscosity continues to increase, the decreasing rate of internal leakage flow slows down and stabilizes at a lower level. The viscous frictional resistance of gears continues to increase and has an increasing impact on pump efficiency. When the changing rate of the volumetric efficiency is less than that of the hydraulic-mechanical efficiency, the pump efficiency curve has a turning point.
The dotted line in
Figure 20 corresponds to a viscosity value of 152 MPa·s. It represents the viscosity of Nuto H10 hydraulic oil at 32 °C when the ambient pressure is 115 MPa. Taking the hydraulic mechanism carried on “Jiaolong” as an example [
18], when the manned submersible is in operation and attitude adjustment, the pressure requirement of the load actuator is 15–19 MPa. In the floating and diving process of manned submersible, the pressure requirement of the de-ballasting cylinder is about 6 MPa. Therefore, in most of the operation process, the efficiency of the pump in the deep-sea hydraulic source prototype gradually increases with the ambient pressure.
3.3. Hydraulic Efficiency
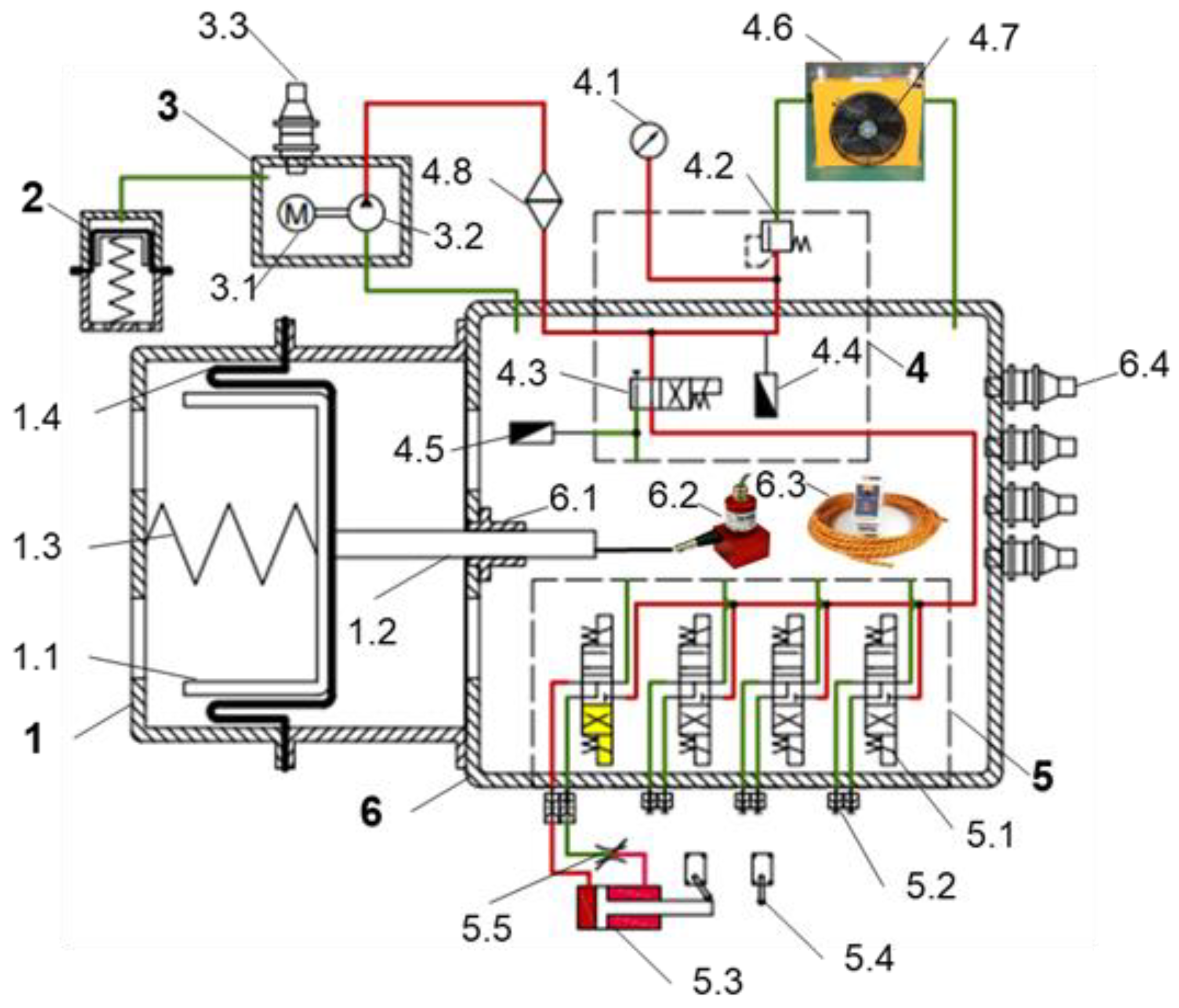
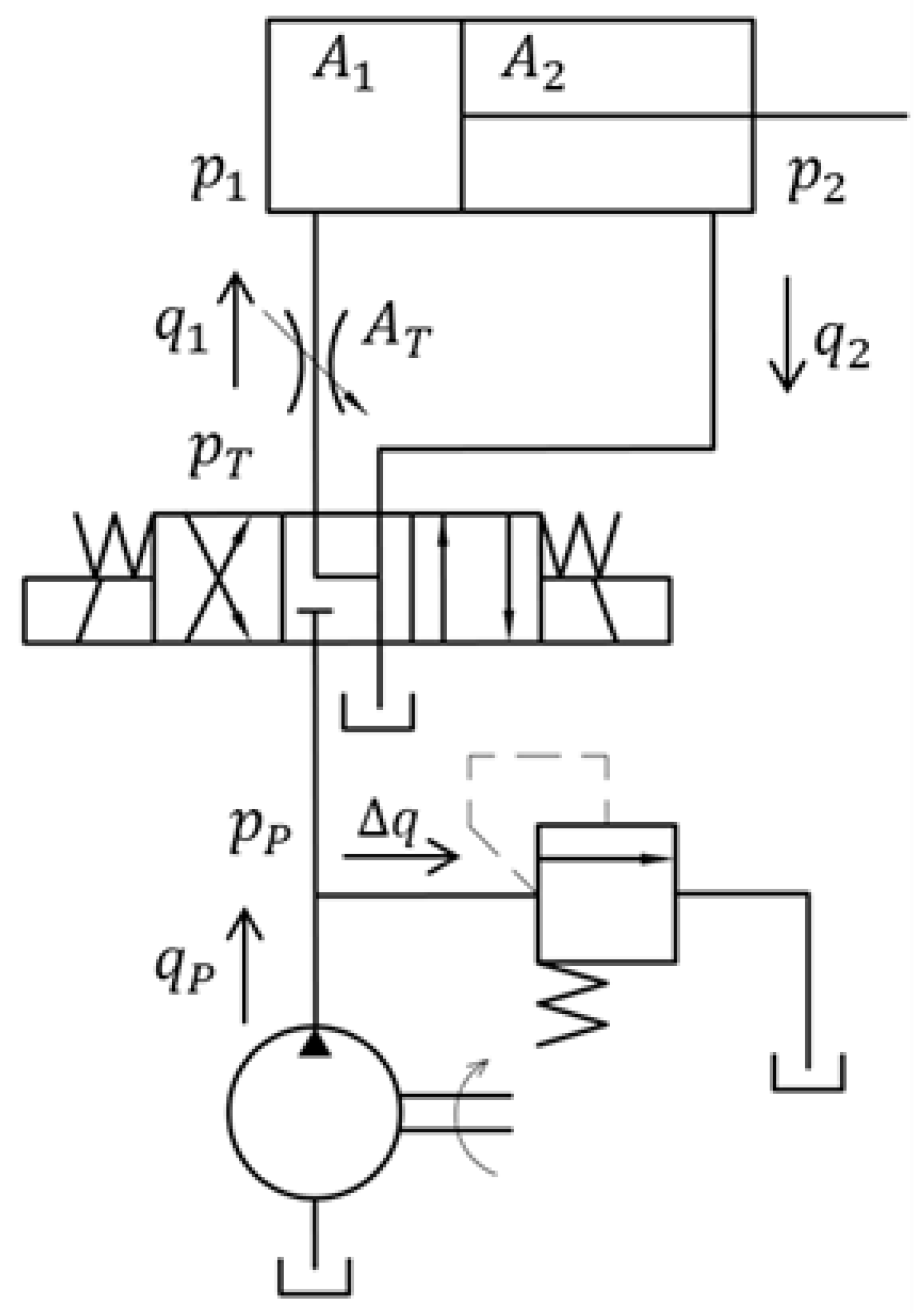
The load actuator of the deep-sea hydraulic source system is mainly the hydraulic manipulator. This paper mainly studies the working characteristics of the deep-sea hydraulic source prototype, so the load unit is simplified as a single-rod hydraulic cylinder controlled by the solenoid directional valve. A simplified hydraulic circuit schematic is shown in
Figure 21.
To simulate different load situations, a throttle valve is connected in series with the single-rod hydraulic cylinder. When the motor speed is constant, different load conditions can be simulated by setting different throttle valve openings. The relief valve is used to adjust the maximum working pressure of the hydraulic system. The efficiency of the hydraulic circuit can be expressed as:
where,
is the load flow;
is the inlet pressure of the throttle valve;
and
is the pressure of rear end chamber and rod end chamber;
and
is the effective working area of rear end chamber and rod end chamber;
is the flow cross-section area of the throttle valve;
is the pressure loss of the circuit;
is the overflow rate.
During the prototype test, no additional load was applied to the hydraulic cylinder rod. When the output pressure of the pump does not reach the opening pressure of the relief valve, it can be approximated as qP ≈ q1. The efficiency of the hydraulic circuit can be approximately equivalent to the ratio of the load pressure to the pump output pressure.
Due to the energy loss of the viscous oil moving in the pipeline, the load pressure is lower than the pump’s output pressure. Among them, the main reasons for the pressure loss are: (1) When the oil flows in the pipeline of equal diameter, the friction head loss caused by the viscous friction. (2) When the oil flows through the suddenly changing section, such as elbows and joints, the local pressure loss caused by the change of flow velocity or flow direction.
(1) Friction head loss
The friction head loss is mainly affected by the roughness of the pipe wall and the fluid flow state, which can be expressed as:
where, Δ is the surface roughness of the pipe wall;
is the inner diameter of the pipe;
is the length of the pipeline;
is the frictional resistance coefficient;
is the oil density, and
is the average flow rate.
Equation (18) is suitable for the calculation of the friction head loss when the fluid is in laminar state and turbulent state. When the fluid is in the laminar state, the friction resistance coefficient is only related to the Reynolds number Re. At this time, the theoretical value of the friction resistance coefficient is . Considering that the temperature may fluctuate during the actual flow, when the liquid flows in the metal pipe, . When the liquid flows in the rubber pipe, .
The inner diameter of the pipeline used in the hydraulic source system is 6 mm. Assuming that the pump’s output flow is the theoretical value of 16 L/min, the dynamic viscosity value of Nuto H10 hydraulic oil is brought into Equation (19), and the Reynolds number of oil flow under different ambient pressures is obtained, as shown in
Table 8.
The critical Reynolds number for judging the laminar flow in a circular tube is Re ≤ 2320. It can be seen from
Table 8 that in the deep-sea environment with a depth over 2000 m, the flow in the pipeline is in the laminar state. The length of the pipeline in the prototype is about 1.5 m, so when the ambient pressure is 115 MPa, the pressure loss along the metal pipe is:
(2) Local pressure loss
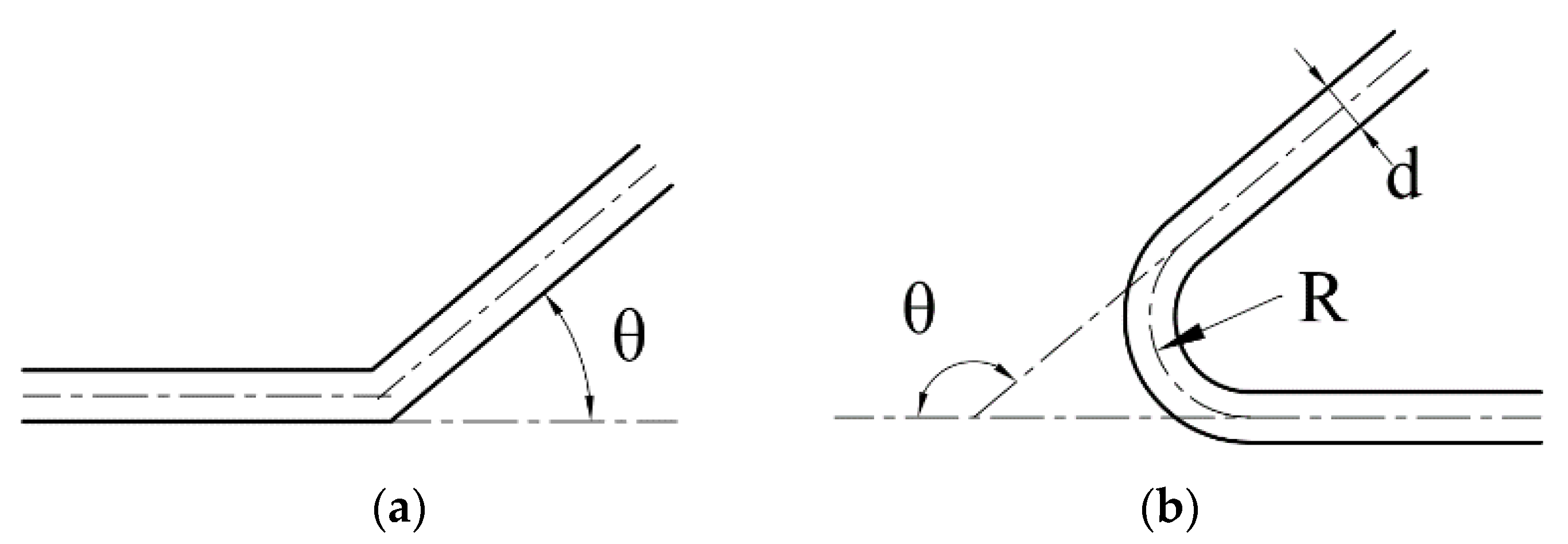
The local pressure loss mainly includes the resistance loss at the elbow and the variable section. As shown in
Figure 2, the main pipeline of the hydraulic source prototype is made of seamless steel pipes. Use only hydraulic hoses to connect the load throttle and hydraulic cylinder. The use of welded pipe joints ensures that the inner diameter of the main pipeline is uniform and reduces the local pressure loss at the variable section. There are two types of elbows that change the flow direction in the hydraulic circuit, as shown in
Figure 22.
The flow phenomenon in the elbow is very complex, and the pressure loss coefficient is generally determined by experiments. The general expression for the local pressure loss is:
where,
is the local resistance coefficient and
is the average flow velocity.
The calculation equation of the local resistance coefficient is shown in
Table 9. Where,
is the direction change angle of the elbow,
is the inner diameter of the bend pipe, and
is the radius of curvature of the elbow. In the hydraulic source prototype, the bend angles are all 90°. The average radius of curvature of the metal pipe is 30 mm,
.
Miter bend pipes mainly exist in valve blocks, valves and other accessories, and smooth bend pipes mainly exist in metal pipes, elbows and other accessories. Substituting the data in
Table 9 into Equation (21), the local pressure loss when the ambient pressure is 115 MPa can be obtained:
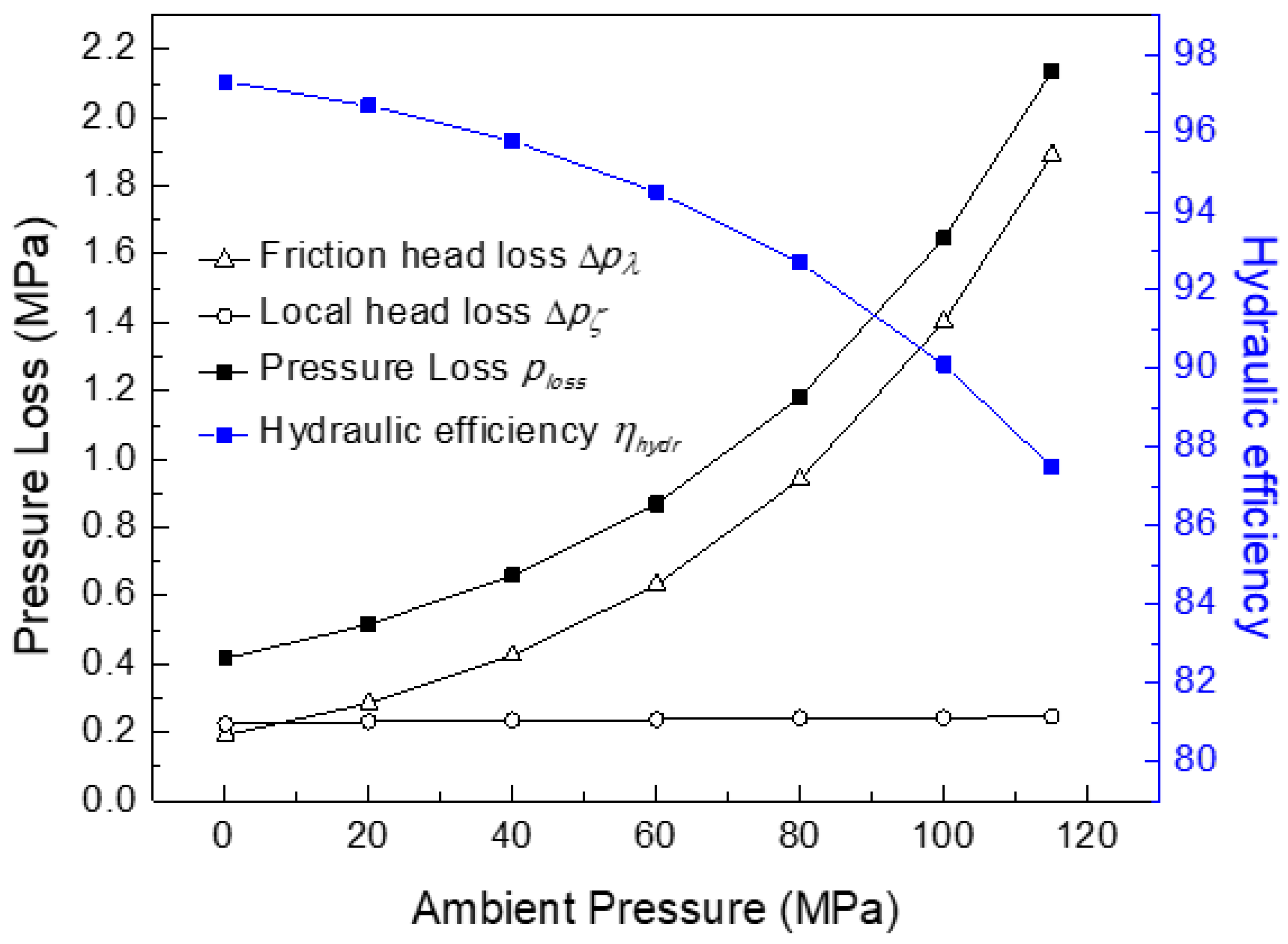
when the system pressure does not reach the opening pressure of the relief valve, the efficiency of the hydraulic circuit can be expressed as:
Equation (23) ignores internal leakage of the spool valve and cylinder piston, and emphasizes the effect of pressure loss on hydraulic circuit efficiency. Among them, the friction head loss is caused by the viscous friction between the oil and the pipe wall, so it is mainly affected by the viscosity of the oil. The local (elbow) pressure loss is caused by the formation of vortices at the elbow when the flow direction changes, which increases the resistance loss and is mainly affected by the oil density.
The variation of pressure loss is shown in
Figure 23. As the oil viscosity increases, the friction head loss and local pressure loss increase, and the friction head loss changes more widely. When the water depth exceeds 6000 m, the pressure loss curve rises faster. The effect of pressure loss on the hydraulic circuit efficiency becomes non-negligible. Therefore, when designing the deep-sea hydraulic system, the layout should be reasonable, and the length of the pipeline should be shortened as much as possible.
3.4. System Efficiency
The
Figure 24 shows the power transfer process between devices, and summarizes the variations of power loss during the transfer process. It can be seen from
Figure 24 that the increase in oil viscosity directly leads to a decrease in the efficiency of deep-sea oil-filled motors and hydraulic circuits. The hydraulic-mechanical efficiency of the external gear pump is negatively affected by the increase of oil viscosity, while its volumetric efficiency increases with the increase of oil viscosity. The opposite trend of the two causes the gear pump efficiency to increase first and then decrease.
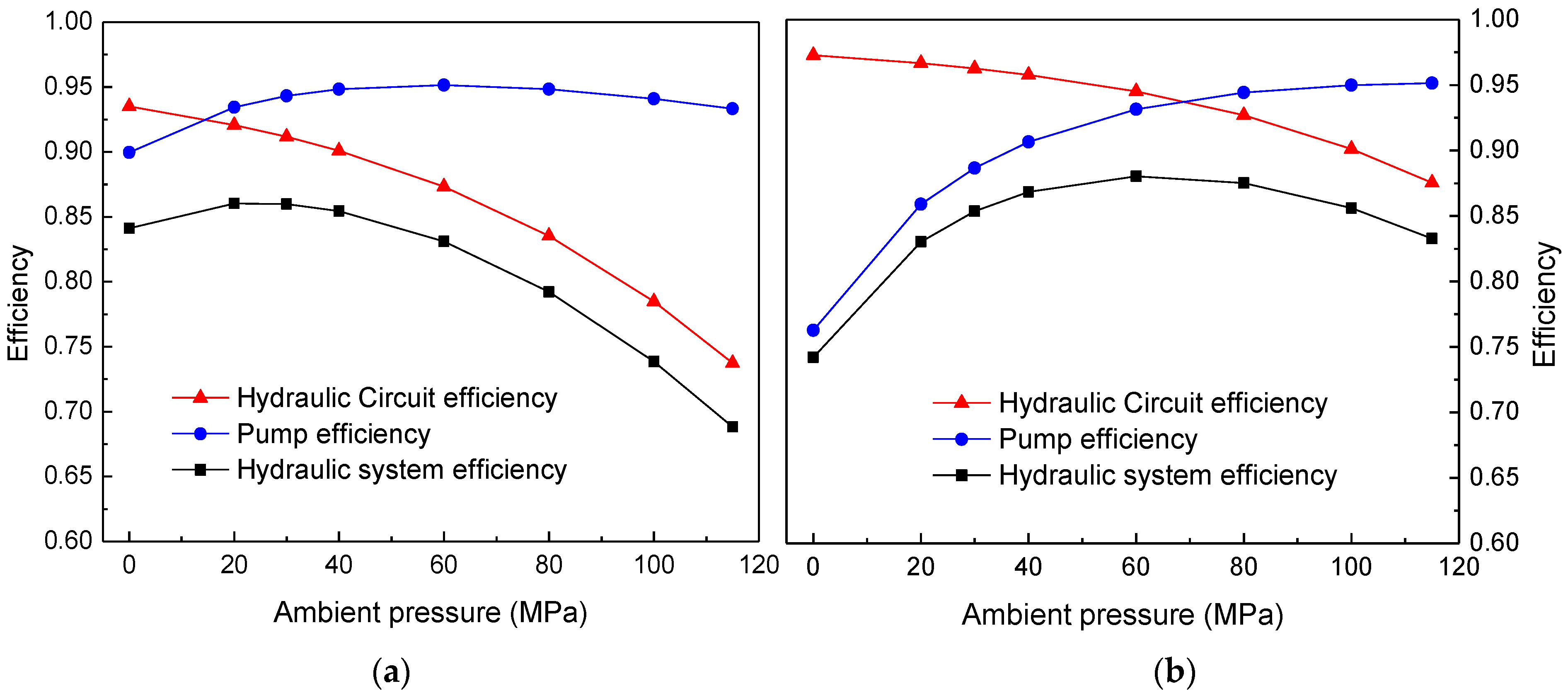
The efficiency characteristics of the motor, pump and hydraulic circuit are studied before, and the efficiency curve of the hydraulic system (pump + hydraulic circuit) and power system (motor + hydraulic system) of the deep-sea hydraulic source can be further obtained, as shown in
Figure 25. In both working conditions, with the increase of ambient pressure, the efficiency of the hydraulic system and power system both increase first and then decrease. The oil viscosity increases exponentially with the increase of the pressure. After entering the pressure range of “Hadal zone” with the depth over 6000 m, the power loss and friction head loss caused by the viscous frictional resistance will have a greater impact on the hydraulic system’s efficiency.
At the same time, compared with the maximum efficiency value, the power system efficiency at ambient pressure of 115 MPa only decreased by 8.3% (under operating condition: load pressure is 15~19 MPa). It has been preliminarily proved that under ideal conditions, using hydraulic oil of ISO VG10 viscosity grade and properly increasing the temperature of the oil tank can improve the efficiency of the hydraulic system at a depth of 10,000 m.
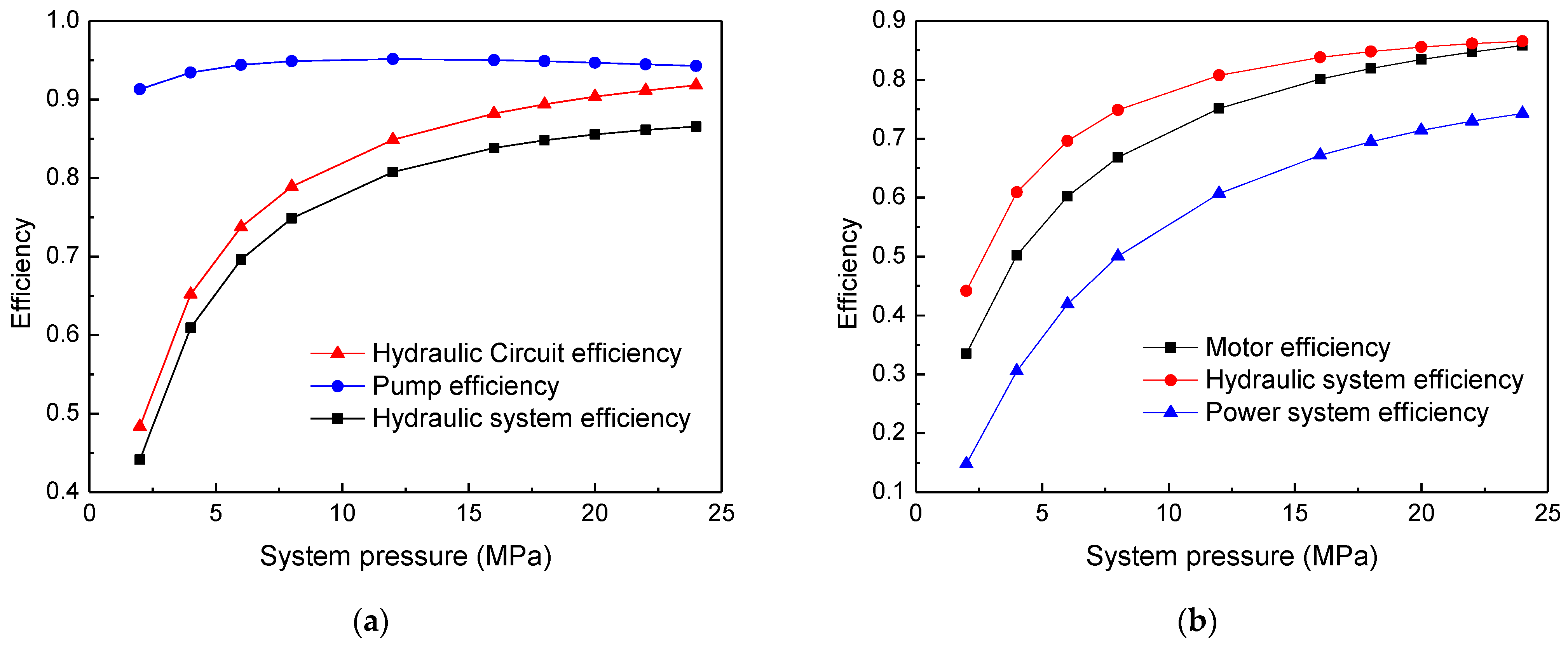
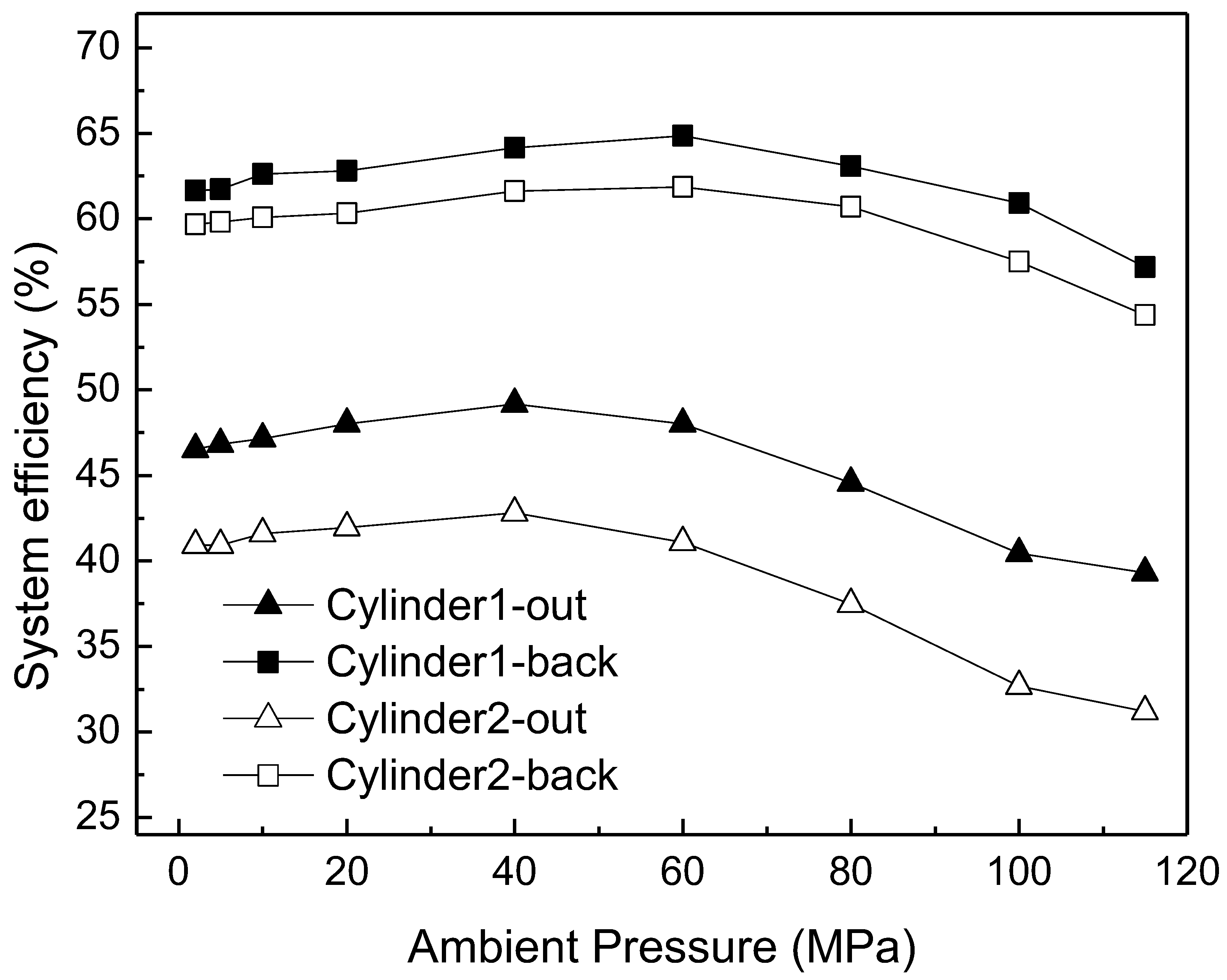
In order to directly reflect the variation of system efficiency under different load pressures, the system efficiency curves under different load pressures are calculated and drawn. During the calculation process, the motor speed and ambient pressure are unchanged. It can be seen from the
Figure 26 that, with the same working parameters set, the system efficiency increases gradually with the increase of the load pressure. Therefore, in order to ensure higher system efficiency, the system should work as close as possible to the rated working pressure (21 MPa).







































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}