
A Hybrid Dynamic Method for Conflict-Free Integrated Schedule Optimization in U-Shaped Automated Container Terminals


Abstract
:1. Introduction
- (1)
- According to the actual operational needs, this paper considers AGVs’ conflict-free path planning and multi-equipment integrated scheduling simultaneously instead of studying them separately.
- (2)
- This paper establishes a bi-level programming-based hybrid dynamic model composed of a discrete event dynamic model and a continuous time dynamic model. It minimizes the handling time of all tasks and avoids AGV conflicts simultaneously.
- (3)
- This paper designs an improved genetic seagull optimization algorithm to solve the model. By comparison with the adaptive genetic algorithm and bi-level genetic algorithm, the proposed method is validated on small-sized and large-sized problems.
2. Literature Review
3. Model Formulation
3.1. Assumptions
- (1)
- The AGV lane is unidirectional.
- (2)
- AGV runs at an average speed, considering the impact of acceleration, deceleration, turning, empty, and load.
- (3)
- A safe distance can be maintained among AGVs.
- (4)
- Multiple AGVs serve multiple quay cranes and they do not fixedly serve a certain quay crane.
- (5)
- The maximum carrying capacity of each AGV is two twenty-foot equivalent unit (TEU). The QC and double-cantilever rail crane can each handle up to 2 TEU at a time.
3.2. Model Parameters
3.3. Design of the Upper-Layer Model
3.4. Design of the Lower-Layer Model
4. Improved Hybrid Genetic Seagull Optimization Algorithm
4.1. Coding and Decoding
4.2. Crossover Based on the Seagull Optimization Algorithm
- (I).
- Collision avoidance: in order to avoid collisions among seagulls, the algorithm uses the additional variable to calculate the new position of seagulls:where represents a new position that does not conflict with other seagulls. represents the current position of the seagull; represents the current number of iterations; represents the motion behavior of the seagull in a given search space, can control the frequency of , where its value decreases linearly from 2 to 0; and is the maximum number of iterations.
- (II).
- Best position direction: after avoiding overlapping with the positions of other seagulls, seagulls will move to the direction of the best position:where represents the direction of the best position, is the random number responsible for balancing the global and local search, and is a random number in the range [0, 1].
- (III).
- Close to the best position: after the seagull moves to the position where it does not collide with other seagulls, it moves towards the direction of the best position to reach a new position:where represents the new position of the seagull.
4.3. Mutation
4.4. Algorithm Flow
5. Numerical Experiments
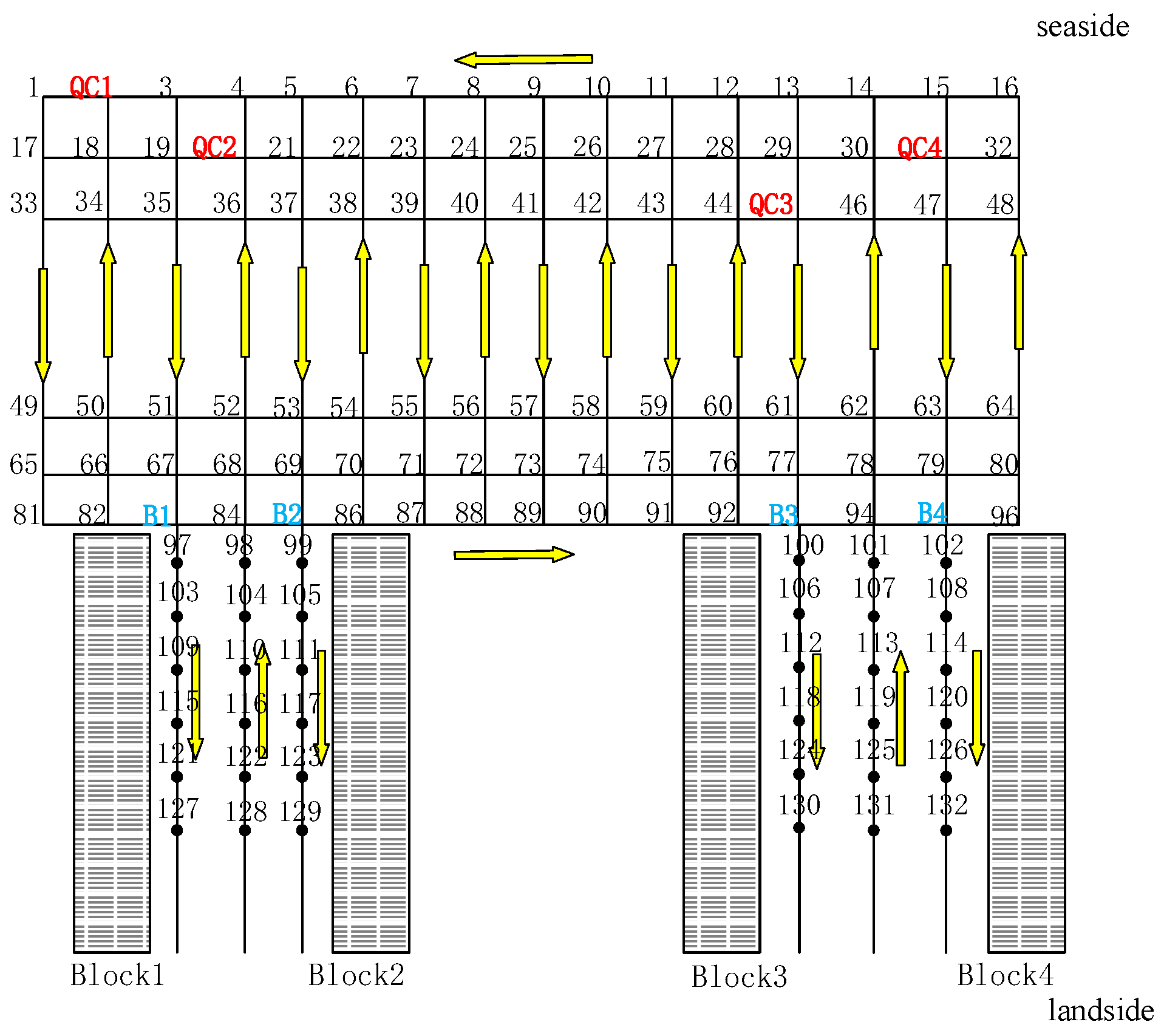
5.1. AGV Path Network
5.2. Parameter Setting
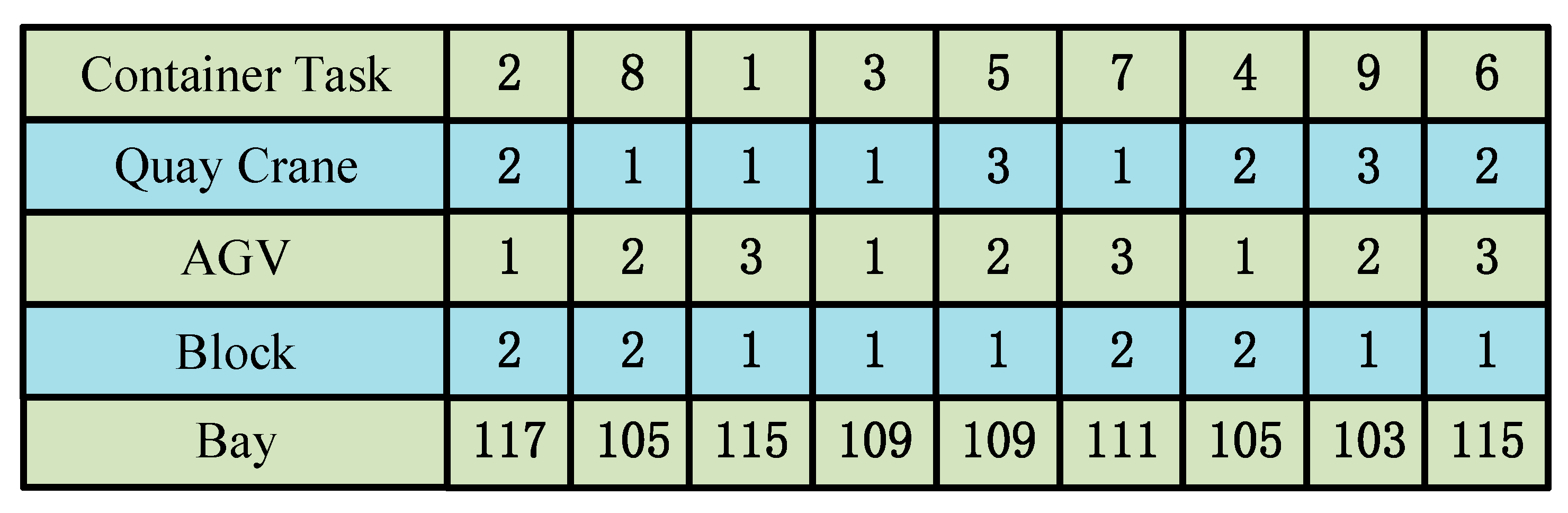
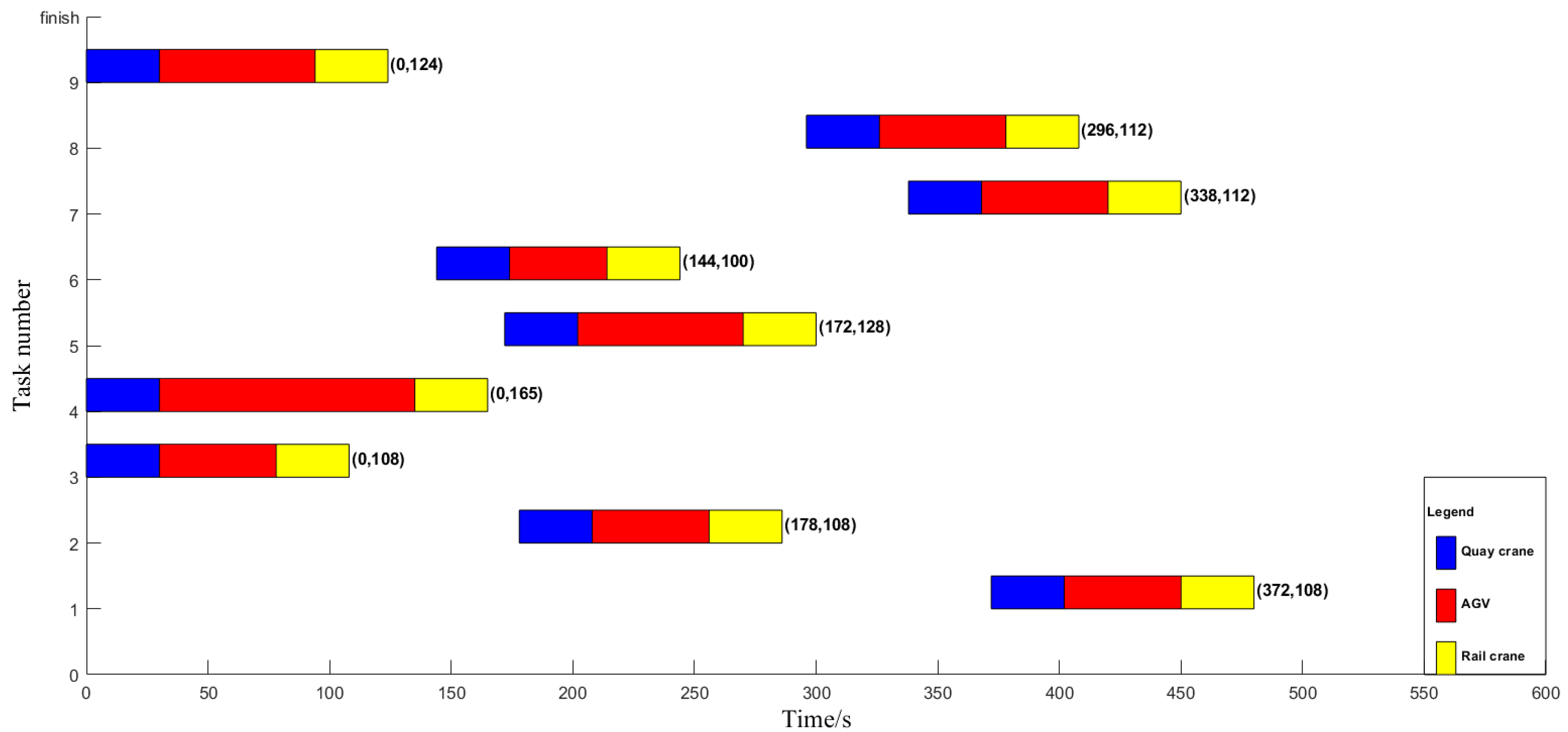
5.3. Results for Small-Sized Problems
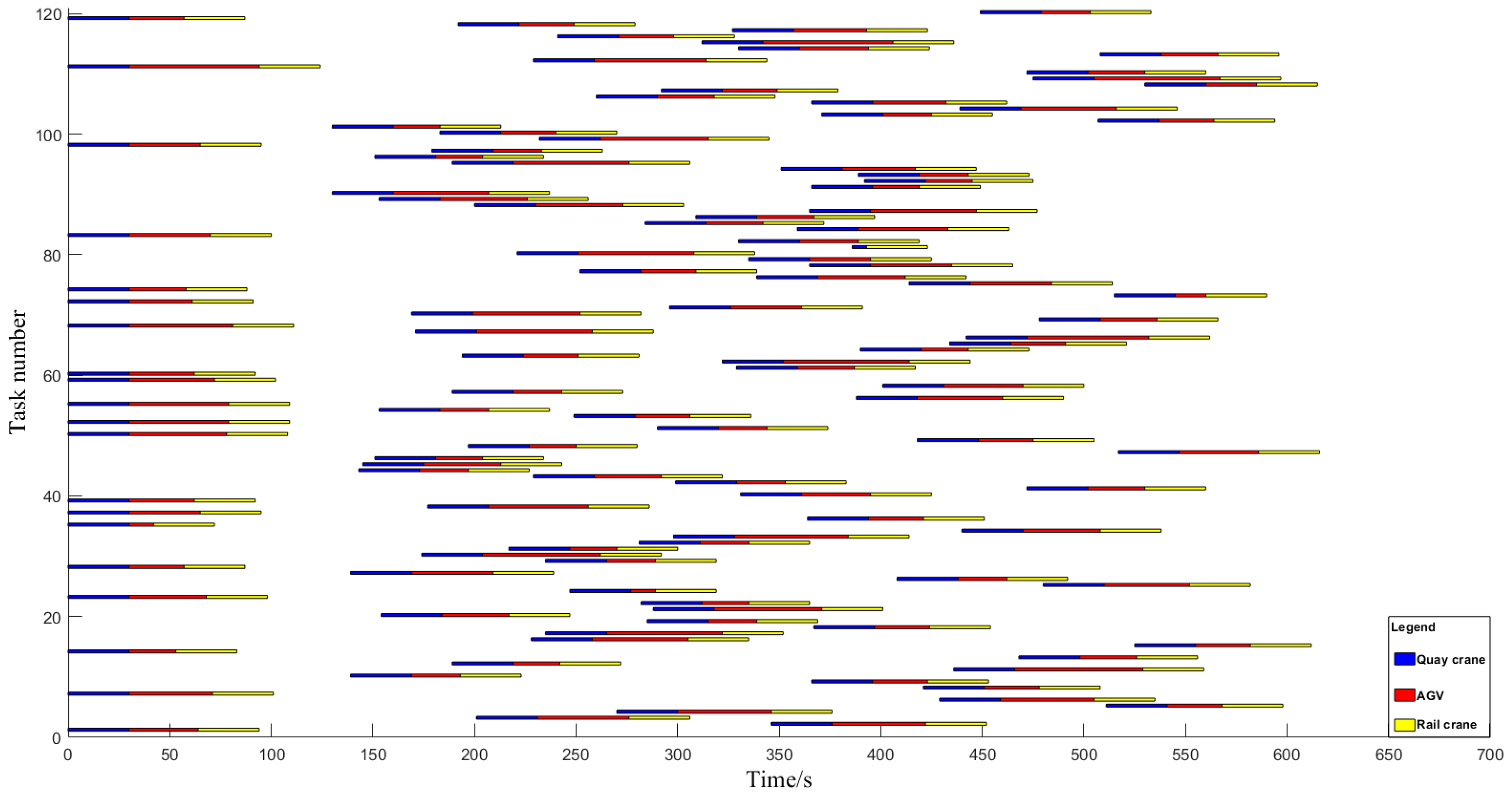
5.4. Results for Large-Sized Problems
- (1)
- In the solving process of GSOA, the hybrid policy of the delay and alternative path can stably obtain the approximately optimal solution of large-sized problems. From examples 13 and 15 in Table 5, when the number of containers is 1200 and the number of AGVs is 40, the average of the objective function value (OFV) is 2779 s; when the number of AGVs is 50, the average of the objective function value is 3709 s, and the difference between the AVE and the MAX is within the acceptable range, which basically meets the time requirements of automated container terminal operation system scheduling.
- (2)
- As the number of containers increases, the total unloading time of the terminal also increases. With the same number of containers, the increase in the number of AGVs will reduce the total unloading time. Therefore, increasing the number of AGVs to a certain extent can significantly improve the efficiency of handling. Different numbers of tasks and AGVs have significant impacts on the total handling time of the terminal.
6. Conclusions
- (1)
- Integrated optimization of automated container terminals contains many aspects and we will take berths and external trucks into consideration in the future.
- (2)
- External truck appointment system, carbon emission, and sea rail intermodal transportation can also be considered.
- (3)
- We may also extend the unloading mode into the loading and unloading mode, and the cooperative scheduling problem of the QC, AGV, and double-cantilever rail crane.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhong, M.; Yang, Y.; Zhou, Y.; Postolache, O. Application of hybrid GA-PSO based on intelligent control fuzzy system in the integrated scheduling in automated container terminal. J. Intell. Fuzzy Syst. 2020, 39, 1525–1538. [Google Scholar] [CrossRef]
- Li, H.; Peng, J.; Wang, X.; Wan, J. Integrated Resource Assignment and Scheduling Optimization With Limited Critical Equipment Constraints at an Automated Container Terminal. IEEE Trans. Intell. Transp. Syst. 2020, 22, 7607–7618. [Google Scholar] [CrossRef]
- Chen, X.; He, S.; Zhang, Y.; Tong, L.C.; Shang, P.; Zhou, X. Yard crane and AGV scheduling in automated container terminal: A multi-robot task allocation framework. Transp. Res. Part C Emerg. Technol. 2020, 114, 241–271. [Google Scholar] [CrossRef]
- Luo, J.; Wu, Y. Scheduling of container-handling equipment during the loading process at an automated container terminal. Comput. Ind. Eng. 2020, 149, 106848. [Google Scholar] [CrossRef]
- Zhen, L.; Yu, S.; Wang, S.; Sun, Z. Scheduling quay cranes and yard trucks for unloading operations in container ports. Ann. Oper. Res. 2019, 273, 455–478. [Google Scholar] [CrossRef]
- Roy, D.; de Koster, R. Stochastic modeling of unloading and loading operations at a container terminal using automated lifting vehicles. Eur. J. Oper. Res. 2018, 266, 895–910. [Google Scholar] [CrossRef]
- Zhao, Q.; Ji, S.; Guo, D.; Du, X.; Wang, H. Research on cooperative scheduling of automated quayside cranes and automatic guided vehicles in automated container terminal. Math. Probl. Eng. 2019, 22, 6574582. [Google Scholar] [CrossRef]
- Jamrus, T.; Chien, C.F.; Gen, M.; Sethanan, K. Hybrid particle swarm optimization combined with genetic operators for flexible job-shop scheduling under uncertain processing time for semiconductor manufacturing. IEEE Trans. Semicond. Manuf. 2017, 31, 32–41. [Google Scholar] [CrossRef]
- Ma, X.; Bian, Y.; Gao, F. An improved shuffled frog leaping algorithm for multiload AGV dispatching in automated container terminals. Math. Probl. Eng. 2020, 2020, 1260196. [Google Scholar] [CrossRef]
- Małopolski, W. A sustainable and conflict-free operation of AGVs in a square topology. Comput. Ind. Eng. 2020, 126, 472–481. [Google Scholar] [CrossRef]
- Xu, B.; Jie, D.; Li, J.; Yang, Y.; Wen, F.; Song, H. Integrated scheduling optimization of U-shaped automated container terminal under loading and unloading mode. Comput. Ind. Eng. 2021, 162, 107695. [Google Scholar] [CrossRef]
- Yang, Y.; Zhong, M.; Dessouky, Y.; Postolache, O. An integrated scheduling method for AGV routing in automated container terminals. Comput. Ind. Eng. 2018, 126, 482–493. [Google Scholar] [CrossRef]
- Murakami, K. Time-space network model and MILP formulation of the conflict-free routing problem of a capacitated AGV system. Comput. Ind. Eng. 2020, 141, 106270. [Google Scholar] [CrossRef]
- Zhong, M.; Yang, Y.; Dessouky, Y.; Postolache, O. Multi-AGV scheduling for conflict-free path planning in automated container terminals. Comput. Ind. Eng. 2020, 142, 371–382. [Google Scholar] [CrossRef]
- Eglynas, T.; Jakovlev, S.; Jankunas, V.; Didziokas, R.; Januteniene, J.; Drungilas, D.; Jusis, M.; Pocevicius, E.; Bogdevicius, M.; Andziulis, A. Evaluation of the energy consumption of container diesel trucks in a container terminal: A case study at Klaipeda port. Sci. Prog. 2021, 104, 00368504211035596. [Google Scholar] [CrossRef]
- Yue, L.; Fan, H.; Ma, M. Optimizing configuration and scheduling of double 40 ft dual-trolley quay cranes and AGVs for improving container terminal services. J. Clean. Prod. 2021, 292, 126019. [Google Scholar] [CrossRef]
- Zhang, Q.; Hu, W.; Duan, J.; Qin, J. Cooperative Scheduling of AGV and ASC in Automation Container Terminal Relay Operation Mode. Math. Probl. Eng. 2021, 2021, 5764012. [Google Scholar] [CrossRef]
- Jonker, T.; Duinkerken, M.B.; Yorke-Smith, N.; de Waal, A.; Negenborn, R.R. Coordinated optimization of equipment operations in a container terminal. Flex. Serv. Manuf. J. 2021, 33, 281–311. [Google Scholar] [CrossRef]
- Li, X.; Peng, Y.; Huang, J.; Wang, W.; Song, X. Simulation study on terminal layout in automated container terminals from efficiency, economic and environment perspectives. Ocean Coast. Manag. 2021, 213, 105882. [Google Scholar] [CrossRef]
- Li, J.; Yang, J.; Xu, B.; Yang, Y.; Wen, F.; Song, H. Hybrid Scheduling for Multi-Equipment at U-Shape Trafficked Automated Terminal Based on Chaos Particle Swarm Optimization. J. Mar. Sci. Eng. 2021, 9, 1080. [Google Scholar] [CrossRef]
- Guo, K.; Zhu, J.; Shen, L. An Improved Acceleration Method Based on Multi-Agent System for AGVs Conflict-Free Path Planning in Automated Terminals. IEEE Access 2020, 9, 3326–3338. [Google Scholar] [CrossRef]
- Zhong, M.; Yang, Y.; Sun, S.; Zhou, Y.; Postolache, O.; Ge, Y.E. Priority-based speed control strategy for automated guided vehicle path planning in automated container terminals. Trans. Inst. Meas. Control 2020, 42, 3079–3090. [Google Scholar] [CrossRef]
- Xin, J.; Negenborn, R.R.; Lodewijks, G. Energy-aware control for automated container terminals using integrated flow shop scheduling and optimal control. Transp. Res. Part C Emerg. Technol. 2014, 44, 214–230. [Google Scholar] [CrossRef]
- Dhiman, G.; Kumar, V. Seagull optimization algorithm: Theory and its applications for large-scale industrial engineering problems. Knowl. Based Syst. 2019, 165, 169–196. [Google Scholar] [CrossRef]
- Oliva, D.; Abd Elaziz, M.; Elsheikh, A.H.; Ewees, A.A. A review on meta-heuristics methods for estimating parameters of solar cells. J. Power Sources 2019, 435, 126683. [Google Scholar] [CrossRef]
- Chen, X.; Yu, K. Hybridizing cuckoo search algorithm with biogeography-based optimization for estimating photovoltaic model parameters. Sol. Energy 2019, 180, 192–206. [Google Scholar] [CrossRef]
- Long, W.; Cai, S.; Jiao, J.; Xu, M.; Wu, T. A new hybrid algorithm based on grey wolf optimizer and cuckoo search for parameter extraction of solar photovoltaic models. Energy Convers. Manag. 2020, 203, 112243. [Google Scholar] [CrossRef]
- Xu, B.W.; Liu, X.Y.; Yang, Y.S. Multi-constrained scheduling model and algorithm for truck appointment system considering morning and evening peak periods. Comput. Integr. Manuf. Syst. 2020, 26, 2851–2863. [Google Scholar]
- Yu, D.; Li, D.; Sha, M.; Zhang, D. Carbon-efficient deployment of electric rubber-tyred gantry cranes in container terminals with workload uncertainty. Eur. J. Oper. Res. 2019, 275, 552–569. [Google Scholar] [CrossRef]
- Su, L.L.; Samuel, M.; Chong, Y.S. Self-organizing neural network approach for the single AGV routing problem. Eur. J. Oper. Res. 2000, 121, 124–137. [Google Scholar]
- Kaveshgar, N.; Huynh, N.; Rahimian, S.K. An efficient genetic algorithm for solving the quay crane scheduling problem. Expert Syst. Appl. 2012, 39, 13108–13117. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm Parameters | Value |
|---|---|
| 50 | |
| 200 | |
| 2 | |
| 1 | |
| 1 | |
| 0.5 | |
| 0.8 | |
| 0.1 |
| AGVs | Container Tasks | Starting Points—Ending Points |
|---|---|---|
| 1 | 3, 6, 8 | QC1-109-QC2-115-QC1-105 |
| 2 | 4, 5, 1 | QC2-105-QC3-109-QC1-115 |
| 3 | 9, 2, 7 | QC3-103-QC2-117-QC1-111 |
| Starting Points—Ending Points | Shortest Path | Best Optimal Alternative Path |
|---|---|---|
| QC1-109 | QC1-1-17-33-49-65-81-82-B1-97-103-109 | QC1-1-17-33-49-50-51-67-B1-97-103-109 |
| 109-QC2 | 109-110-104-98-84-68-52-36-QC2 | 109-110-104-98-84-B2-86-70-54-38-22-21-QC2 |
| QC2-115 | QC2-19-35-51-67-B1-97-103-109-115 | QC2-19-18-17-33-49-65-81-82-B1-97-103-109-115 |
| 115-QC1 | 115-116-110-104-98-84-68-52-36-QC2-4-3-QC1 | 115-116-110-104-98-84-B2-86-70-54-38-22-6-5-4-3-QC1 |
| QC1-105 | QC1-1-17-33-49-65-81-82-B1-84-B2-99-105 | QC1-1-17-33-49-50-51-52-53-69-B2-99-105 |
| Conflict Object | Conflict Link | The Starting Time of Conflict Link/s | The Ending Time of Conflict Link/s |
|---|---|---|---|
| AGV 1—AGV 3 | <QC2,19> | 156 | 178 |
| AGV 1—AGV 3 | <QC1,1> | 316 | 330 |
| AGV 1—AGV 3 | <99,105> | 394 | 398 |
| AGV 2—AGV 3 | <QC1,1> | 426 | 350 |
| GSOA | AGA | BGA | ||||||
|---|---|---|---|---|---|---|---|---|
| No. | Containers | AGV | OFV/s MAX/AVE | CPU/s | OFV/s MAX/AVE | CPU/s | OFV/s MAX/AVE | CPU/s |
| 1 | 40 | 10 | 382/363 | 11 | 468/447 | 36 | 503/486 | 46 |
| 2 | 80 | 10 | 759/725 | 45 | 967/950 | 85 | 1096/986 | 76 |
| 3 | 120 | 10 | 1120/1080 | 53 | 1523/1326 | 116 | 1424/1354 | 126 |
| 4 | 120 | 20 | 657/630 | 31 | 855/722 | 135 | 884/769 | 154 |
| 5 | 200 | 20 | 1089/1034 | 54 | 1312/1155 | 385 | 1326/1203 | 425 |
| 6 | 200 | 50 | 555/535 | 67 | 967/823 | 399 | 1066/862 | 362 |
| 7 | 400 | 20 | 1923/1813 | 329 | 2551/2336 | 497 | 2352/2246 | 457 |
| 8 | 400 | 40 | 1023/962 | 148 | 1599/1356 | 451 | 1597/1356 | 489 |
| 9 | 640 | 20 | 3117/2930 | 301 | 3824/3561 | 556 | 3923/3653 | 582 |
| 10 | 640 | 40 | 1593/1501 | 271 | 2014/1855 | 550 | 1926/1795 | 586 |
| 11 | 800 | 40 | 2007/1873 | 292 | 2932/2634 | 507 | 2964/2862 | 487 |
| 12 | 1200 | 30 | 3925/3671 | 327 | 4725/4423 | 794 | 4723/4536 | 724 |
| 13 | 1200 | 40 | 2994/2779 | 346 | 3764/3658 | 780 | 3961/3782 | 715 |
| 14 | 2000 | 40 | 4806/4558 | 696 | 6547/6179 | 1305 | 6648/6324 | 1154 |
| 15 | 2000 | 50 | 3952/3709 | 693 | 5779/5476 | 1653 | 5992/5859 | 1597 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, B.; Jie, D.; Li, J.; Zhou, Y.; Wang, H.; Fan, H. A Hybrid Dynamic Method for Conflict-Free Integrated Schedule Optimization in U-Shaped Automated Container Terminals. J. Mar. Sci. Eng. 2022, 10, 1187. https://doi.org/10.3390/jmse10091187
Xu B, Jie D, Li J, Zhou Y, Wang H, Fan H. A Hybrid Dynamic Method for Conflict-Free Integrated Schedule Optimization in U-Shaped Automated Container Terminals. Journal of Marine Science and Engineering. 2022; 10(9):1187. https://doi.org/10.3390/jmse10091187
Chicago/Turabian StyleXu, Bowei, Depei Jie, Junjun Li, Yunfeng Zhou, Hailing Wang, and Huiyao Fan. 2022. "A Hybrid Dynamic Method for Conflict-Free Integrated Schedule Optimization in U-Shaped Automated Container Terminals" Journal of Marine Science and Engineering 10, no. 9: 1187. https://doi.org/10.3390/jmse10091187