1. Introduction
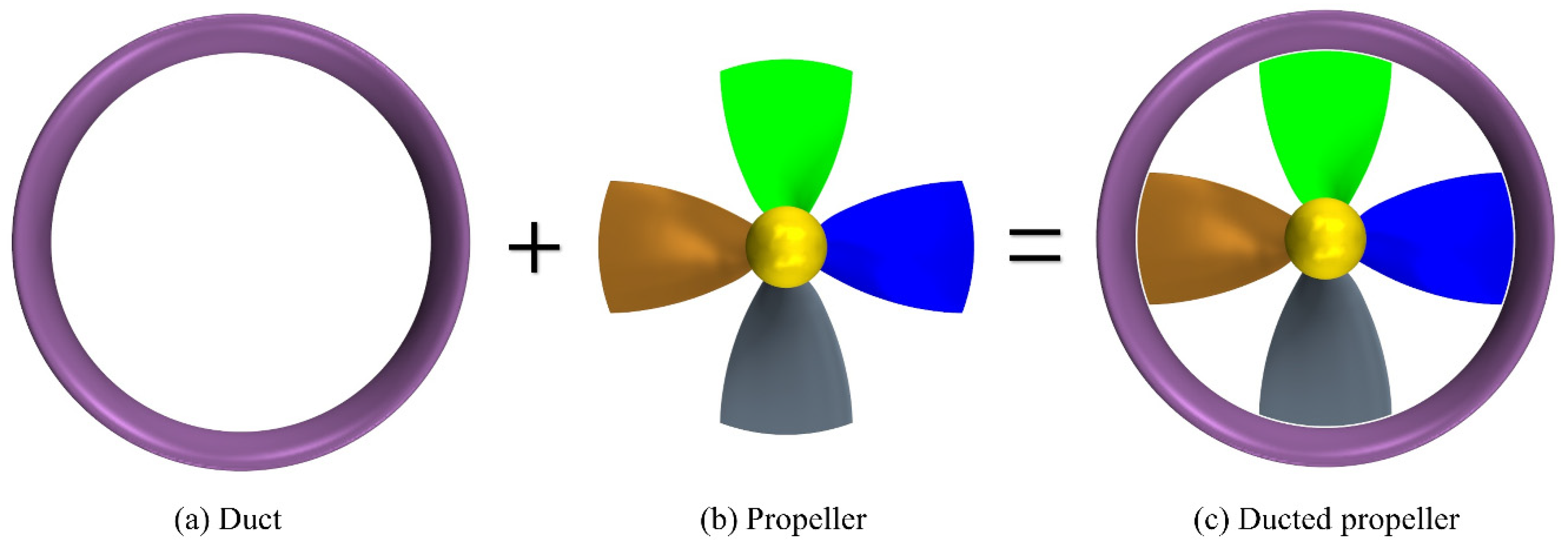
A ducted propeller is composed of a propeller and an annular duct with a two-dimensional hydrofoil in its cross-section. The propeller is fixed in the center of the duct. The duct has a significant optimization effect on the flow field of the propeller and its wake. It can improve the thrust and torque of the propeller, and provides additional thrust under heavy loads and low speeds, thereby significantly improving the propulsion efficiency [
1]. In addition, the duct improves the inflow of the propeller [
2]; thus, the velocity at the ducted propeller disc surface is much less affected by a change in the ship’s speed than with an ordinary propeller. Therefore, ducted propellers are widely used in the field of ship propulsion.
The hydrodynamic performance of a ducted propeller is affected by many factors. The research on ducted propellers generally involves changing a single parameter to observe its influence on various performance characteristics. Gaggero, Villa, Tani, Viviani, and Bertetta [
2] proposed an optimized design method for ducted propeller acceleration ducts and deceleration ducts. Hubless and four pairs of hub-type Ka4-70 propellers with four different hub diameter ratios of 0.05, 0.1, 0.167, and 0.25 were simulated by Song et al. [
3]. The simulation results showed that hubless Ka4-70 propellers were more efficient than hub-type Ka4-70 propellers, and the efficiency increased with the increase in the hub diameter and advance coefficient. The numerical analysis of the wake vortex dynamics of ducted and non-ducted propellers was carried out by using the detached eddy simulation (DES) method [
4], and the characteristics of the vortex structure under different loading conditions were analyzed in detail. The results showed that the shape and stability of the wake vortex structure of the propeller were significantly affected by the duct. By changing the number of blades, Gong et al. [
5] discussed the effect of blade–duct interactions on the wake dynamics. The hydrodynamic characteristics, wake evolution, and instability characteristics of the blades in non-ducted and ducted conditions were also comparatively analyzed.
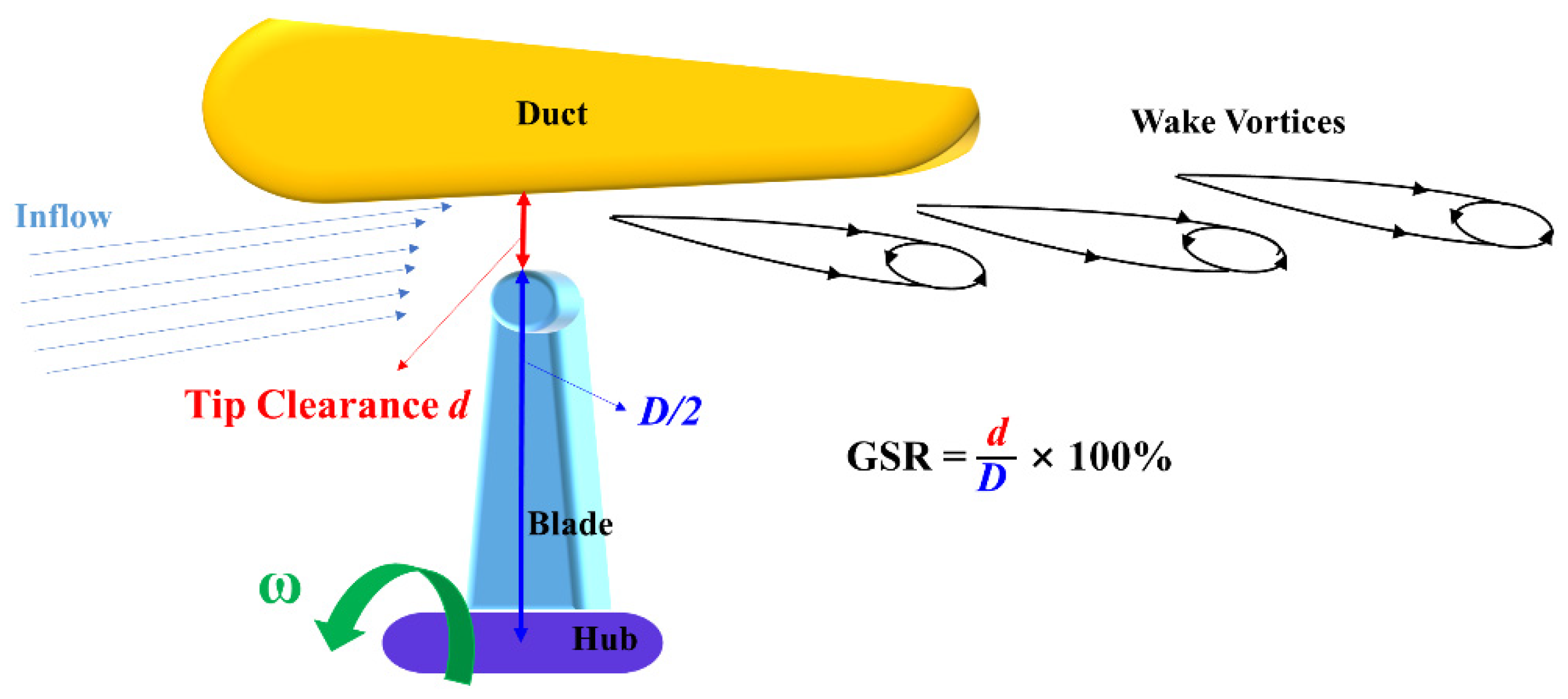
Furthermore, for ducted propellers and other pump machinery, there is a geometric parameter that has a significant influence on the flow field and performance: the tip clearance [
6,
7]. For a ducted propeller, the flow in its tip clearance area has a significant influence on the performance and the wake, resulting in a special flow phenomenon that is different from that of an ordinary open propeller.
Several simulations on the influence of the tip clearance size showed that the efficiency decreases as the tip clearance increases, and the pressure fluctuation increases with the increase in the tip clearance [
8]. Hao et al. [
9] studied the energy characteristics and radial forces of symmetric- and asymmetric-tip-clearance mixed-flow pumps, and the results showed that with the increase in the tip clearance, the efficiency decreased. For mixed-flow pumps with asymmetric tip clearance, the energy performance decreased and the total radial force increased. An and Wang [
6] used the two-way fluid–structure interaction (FSI) method to analyze the influence of the tip clearance on a composite ducted propeller. However, they did not analyze the influence of the flow field on the propeller’s open-water characteristics (OWCs). The analysis of the ducted propeller vortices, which have a significant effect on the ducted propeller’s wake flow, was also not performed.
Pressure fluctuations and energy recovery are also closely related to the tip clearance, due to differences in the tip leakage vortex (TLV) structure for different values of the tip clearance, and their influence on the wake flow field. The TLV structure of the NACA0009 hydrofoil was studied by Bi et al. [
10], and the influence of two types of grooves on the TLV and its suppression mechanism were analyzed. The three-dimensional full-flow field of a pump-jet propeller was simulated based on the DES model by Yuan et al. [
11]. The vortex shape of the vortex core in the tip clearance area and the surrounding flow field was obtained by simulations, and the dynamic characteristics of the tip vortex inside the pump-jet propeller were revealed. The important influence of the tip clearance on the pressure fluctuations of the pump and the pump-jet propeller (PJP) was discussed [
8,
12]. The results showed that with the increase in the tip clearance, the intensity of the leakage vortex enhanced, and the maximum value of pressure fluctuation in the PJP increased significantly. However, the evolution of the TLV was not mentioned in these articles.
In the field of computational fluid dynamics (CFD), the Reynolds-averaged Navier–Stokes (RANS) method [
13] has been widely used by many scholars for calculating ducted propellers’ performance [
14]. However, the detailed flow fields cannot be captured by the RANS method [
15]. Therefore, in recent years, other advanced turbulence models—e.g., the DES model [
16], delayed detached eddy simulation (DDES) model, improved delayed detached eddy simulation (IDDES) model, and large eddy simulation (LES) model—have been increasingly used to simulate ducted propellers.
Posa et al. [
17] used the LES method to simulate the instability of turbine blade-tip vortex shedding. Jiang et al. [
18] developed an LES model of the tip clearance flow of a three-dimensional airfoil with an end-wall moving linear cascade, and discussed the mechanism of the tip clearance vortex variation with respect to tip clearance width. However, the LES method requires a large amount of computation, and it is a huge challenge for current computational resources—especially in the engineering field. By combining the advantages of the RANS and LES models, more accurate simulations can be carried out with limited computational resources, so hybrid RANS–LES models have been widely used in duct machinery in recent years. Zhang and Jaiman [
19] used the DDES model and the transient sliding mesh method to perform numerical ducted propeller simulations, and studied the vortex structure evolution and tail loss stability under conditions with zero inflow and different advance coefficients, but the tip clearance effect was not mentioned. A hybrid RANS–LES model was used to study the transient flow of a pre-swirl stator pump-jet propeller by Li et al. [
20], and the unsteady forces and wake vortices were compared under the design conditions. The flow of a jet propeller with a pre-swirl pump was numerically simulated using the IDDES method, and the effects of the stator, rotor, and duct on the wake and vortex structures were discussed [
21]. However, the influence of the tip clearance size was not taken into consideration by these studies. Liu et al. [
22] used numerical methods to study the energy characteristics and TLV of a turbine mixed-flow pump in the pump state, and analyzed the TLV mode, evolution, and related flow instabilities under positive and negative blade rotation angles. However, the interaction relationship between the TLV and the wake dynamics was not explained.
In previous studies, the relationship between the OWCs of ducted propellers and their tip clearance flow has not been clearly elucidated. The evolution of the TLV has rarely been studied. In particular, the mechanism of TLV variation with the size of the tip clearance has not been revealed, nor has the effect of the TLV evolution on the wake stability. Under such circumstances, in this paper, simulations were conducted to study the tip clearance effect on the OWCs and the flow of the ducted propeller, and to reveal the full life-cycle evolution of the TLV under different tip clearance sizes, along with the interaction mechanisms of the wake instability.
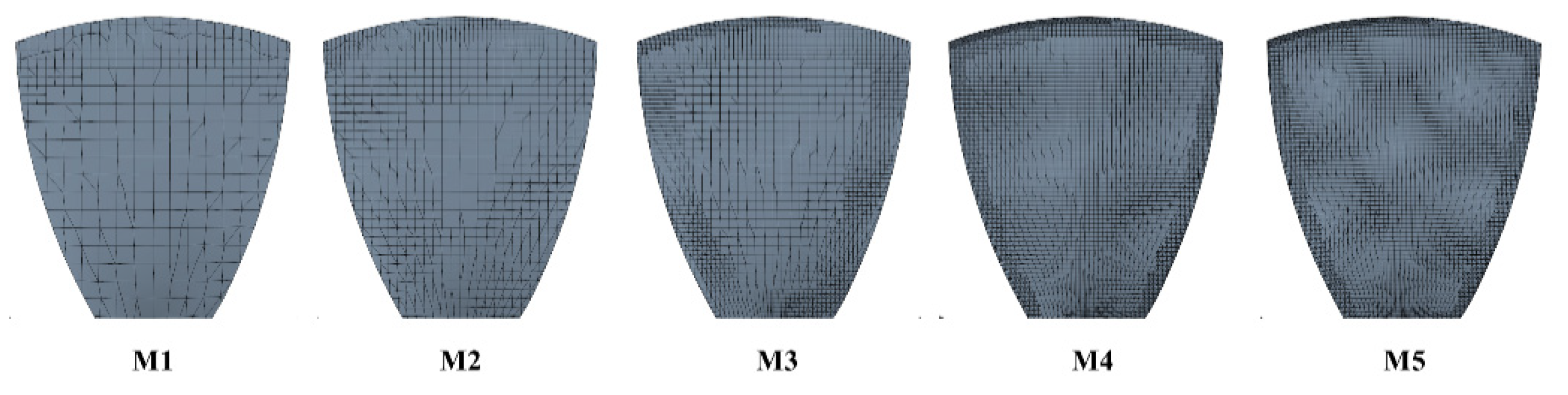
This paper is outlined as follows: First, the governing equations and turbulence modeling methods are provided. Then, the geometry of the ducted propeller, its variations, and the OWCs are presented. After that, mesh convergence and the accuracy of the solvers are validated based on five meshes. Finally, simulations of four ducted propellers with different tip clearance sizes by the IDDES method, along with the effect of tip clearance on the OWCs, flow field, and evolution of the TLV, are discussed in detail. Furthermore, fast Fourier transform (FFT) analysis of the pressure and circumferential velocity, along with power spectral density (PSD) analysis at a series of measuring probes in the wake, is presented to explore the effect of the gap-to-span ratio (GSR) on the wake dynamics.
5. Results and Discussion
5.1. Influence of the Gap-to-Span Ratio (GSR) on OWCs
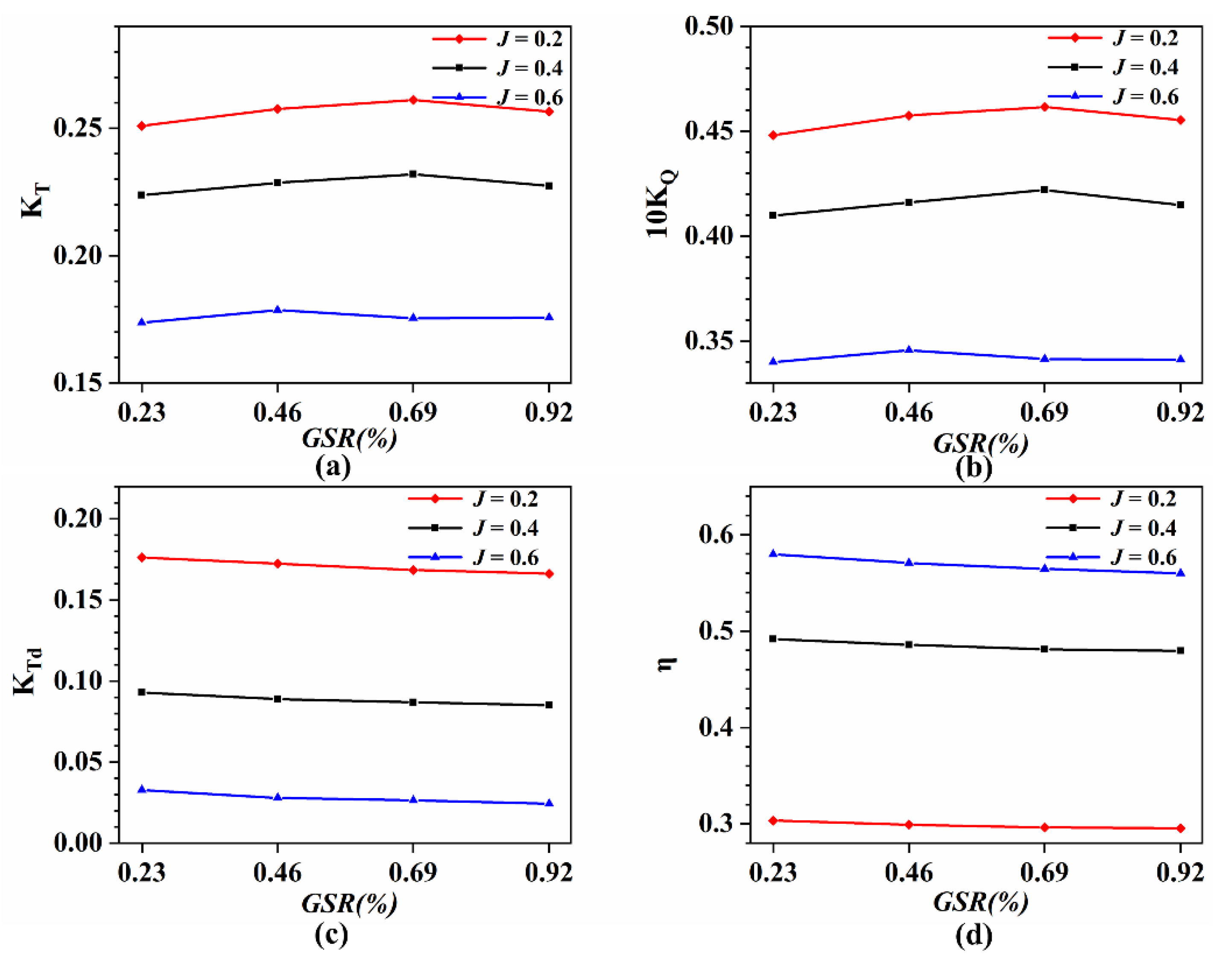
In the numerical simulation, the time history of the blade and duct forces of the ducted propeller was obtained. The calculation was converged after about 1.2 s. Thus, the force and thrust data were derived and averaged within 1.2 s to 1.4 s, which was equivalent to three revolutions of the propeller. After that, the blade thrust, torque, and duct thrust of the ducted propeller were made dimensionless, and the variations of the ducted propeller’s OWCs with the advance speed coefficient and GSR were determined according to the simulation results, as shown in
Figure 11.
KTB,
KTD, and the torque coefficient
KQ all decreased as the advance speed coefficient increased, which is consistent with the results shown in
Figure 8. With the increase in the GSR,
KQ and
KTB increased, but with a turning point, and an optimal tip clearance
d could be achieved. In addition, as the advance coefficient increased, the tip clearance of the ducted blade corresponding to the best thrust and torque of the blade tended to decrease. Moreover, both
KTD and
η0 were gradually reduced.
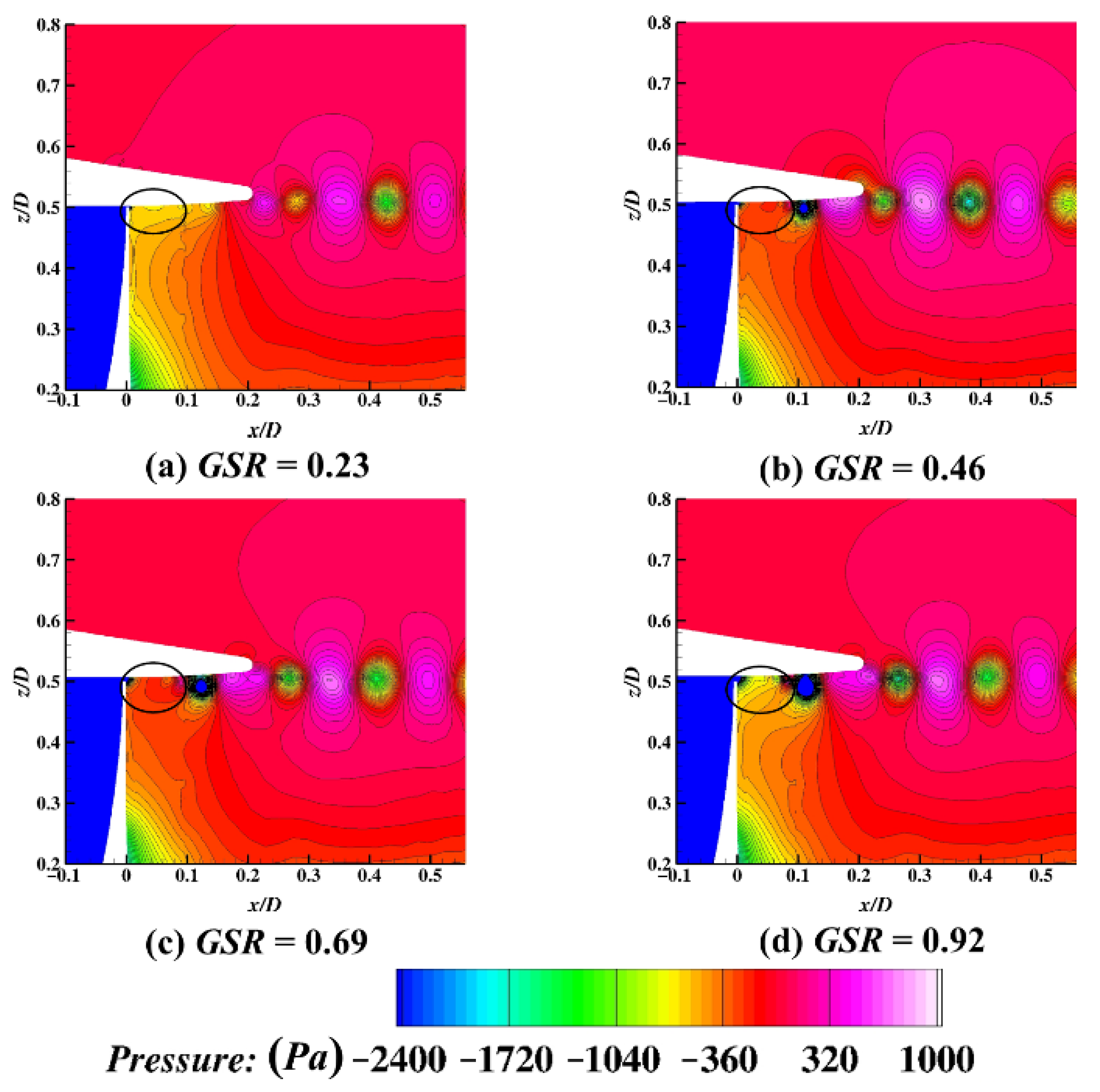
The pressure distribution on the propeller blades and the inner surface of the duct was obtained, as shown in
Figure 12. The pressure values marked in black circles in
Figure 12a,d were relatively small, while those in
Figure 12b,c were relatively high. Since the thrust of propeller comes from the pressure difference between the pressure side and the suction side, when GSR = 0.46 and 0.69, the
KQ and
KTB values related to the blades had a significant increase, while at GSR = 0.92, they reduced instead. Due to the extremely small tip clearance, when GSR = 0.23, the TLV was scattered on the duct surface at a very early stage; thus, no significant vortex shedding area was observed on the inner wall of the duct, while the pressure of areas located in the suction blades of the other three cases was affected by the vortex shedding of the adjacent blades.
It can be concluded that the decrease in both KQ and KTB at GSR = 0.92 was mainly due to the mutual influence of the TLV and the duct. The previously occurring large-vorticity area reduced the pressure of the ducted propeller blade’s pressure side, decreasing the hydrodynamic performance coefficients KQ and KTB of the propeller.
In fact, the thrust of the ducted propeller is jointly provided by the propeller and the duct, and the vortex leakage of the ducted propeller increases with the increase in GSR, indicating that the total energy loss becomes larger. However, with the decrease in GSR, the interaction between the TLV and the duct becomes stronger, so the thrust force on the duct increases. At this point, the force on the propeller decreases compared with the larger GSR, but the resultant force increases, complying with the conservation of energy.
When referring to the energy recovery of the ducted propeller, we took the combined thrust of the ducted propeller as the output power [
26]. The overall energy utilization effect of the ducted propeller increased as the GSR decreased, as can be observed from the efficiency diagram in
Figure 11d, showing that the overall efficiency of the ducted propeller decreased with the increase in GSR. That is, the energy recovery of the duct decreased as the GSR increased.
5.2. GSR’s Influence on Tip Leakage Vortex (TLV) Evolution
The TLV of the ducted propeller is its unique flow phenomenon, which has a significant influence on the performance, cavitation, corrosion, and other performance characteristics. Furthermore, it is an extremely important tail vortex structure of the ducted propeller, which has a significant influence on the performance and wake flow instability. Under different GSRs, some differences and similarities in the shapes of the ducted propellers’ TLVs are elaborated.
Since the ducted propeller reached its maximum efficiency near
J = 0.6, this advance coefficient was selected to perform numerical simulations on four groups of ducted propellers with different GSRs. The calculations for the four cases reached convergence. Side views of a single-blade vortex are shown in
Figure 13. In the TLV evolution process of each ducted propeller, a primary tip leakage vortex (PTLV) and a secondary tip leakage vortex (STLV) were observed. The PTLV occurred near the leading edge of the ducted propeller blade, while the STLV mainly occurred in the middle of the blade, and it developed in clusters at the beginning of its generation. The isosurface of
Q = 2 × 10
5 s
−2 was employed to capture the tip leakage vortex.
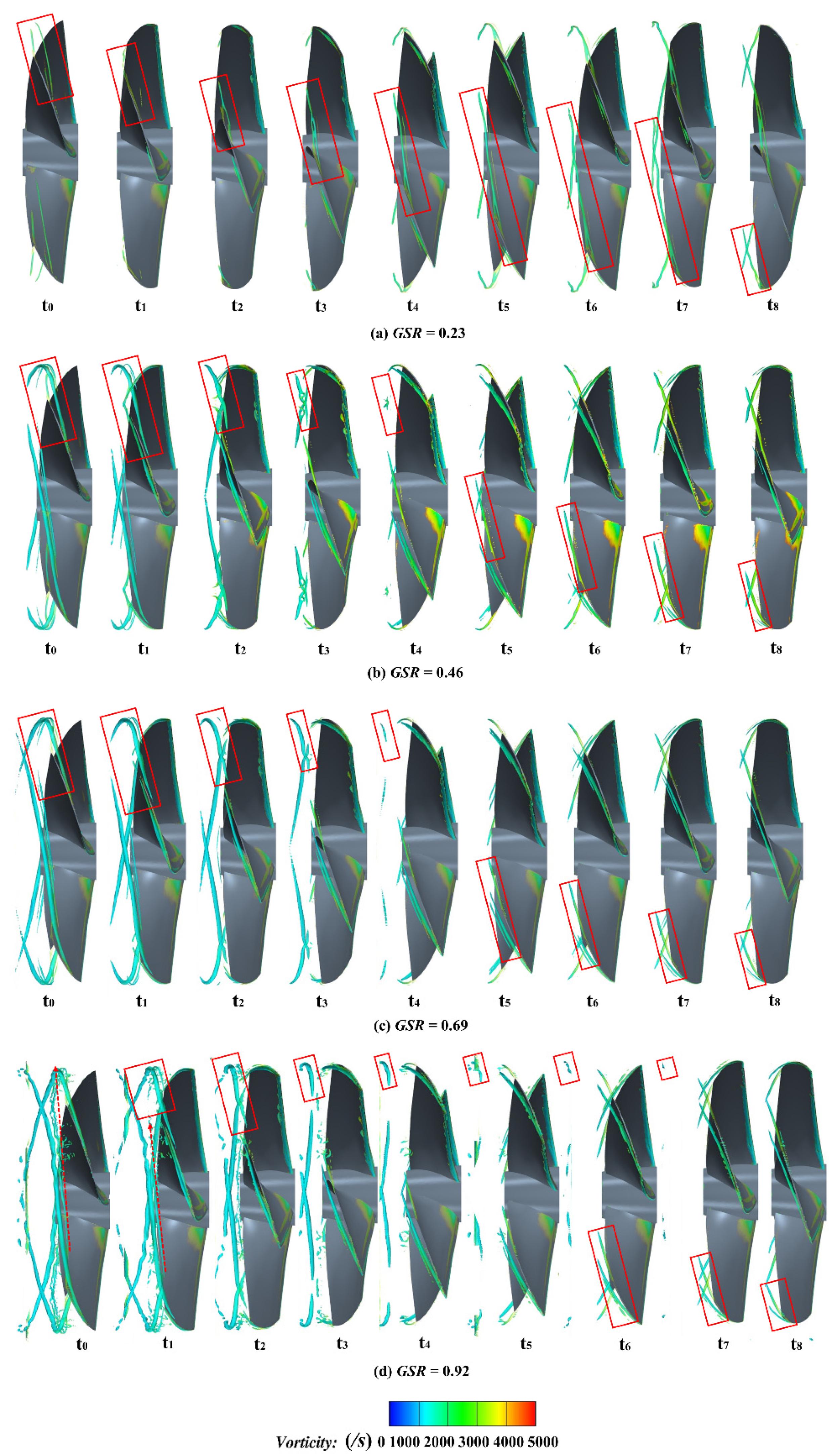
Four groups of ducted propellers with J = 0.6 were simulated to explore the process of TLV generation, development, and evolution. During one revolution, one-third of a rotation period was taken as T. Nine time intervals were averaged to capture the blade vortex leakage at each time node. The TLV in one blade was tracked in nine time intervals to demonstrate the effect of GSR on its generation and evolution process.
Overall, the PTLV was generated at a position slightly closer to the blade’s leading edge, while the STLV was generated at the middle of the blade tip. The STLV merged or collided with the PTLV in its development process, with a significant impact on the stability of the PTLV. The absolute value of the vorticity decreased, while the vortex structure size expanded with the increase in the GSR.
When GSR = 0.23, from the color of the scalar bar, we observed that the vortex value of the vortex structure was larger than that of the other cases, but its extension width was the smallest. At t0, the vortex was in the attenuation and dissipation stage, and it dissipated completely at time t1; then, a new cycle of TLV development began. From t2 to t5, it was in the development period of the TLV. At t2 and t3, the PTLV and STLV merged, and developed together thereafter. At t5, the development of the TLV effectively reached its maximum. The TLV was in a stable period from t5 to t7, and there was no major change in the extended length and stability of the TLV. The stable duration was a special development period when the GSR was small, which was not available in other cases.
At GSR = 0.46 and 0.69, the vortex structures were relatively similar. Both essentially reached the maximum vortex development at time t0, and then began to attenuate and dissipate from t2 to t4. Finally, the vortex structures had mostly dissipated at time t5, and a new vortex appeared. When the GSR was large—namely, GSR = 0.92 in this simulation—the flow phenomenon was different from the other cases. At t0, the red arrow indicates that the STLV of the previous blade extended into the vortex system of the next blade and interacted with it. Due to its strong instability, this STLV gradually dissipated at t1 and t2, and it completely disappeared at t3. The influence of the STLV and the instability of the PTLV accelerated the dissipation period relatively quickly. However, its dissipation period was very long (from t2 to t6), and the vortex structure of the previous TLV in the upper row of red boxes dissipated very slowly. We speculate that the width and depth of this vortex were larger than those in the other cases.
In summary, the GSR has a significant impact on the ducted propeller’s TLV. With its increase, the TLV structure becomes larger and more complex, and it contains more energy. As a result, less energy is recovered by the ducted propeller, and there is more energy loss in the flow field. Therefore, the GSR of the ducted propeller should be reduced in order to improve the energy recovery effect, which is consistent with the previous analysis of the efficiency. In addition, for the Ka4-70 propeller in the 19A duct, the GSR should be less than 0.9 to avoid the induced merging of the previous blade’s STLV and the incoming blade’s PTLV, as well as to reduce the energy loss of the flow field.
5.3. GSR’s Influence on Wake Instability
In order to study the effect of the GSR on the evolution and characteristics of the ducted propeller’s wake, the
Q = 5000 s
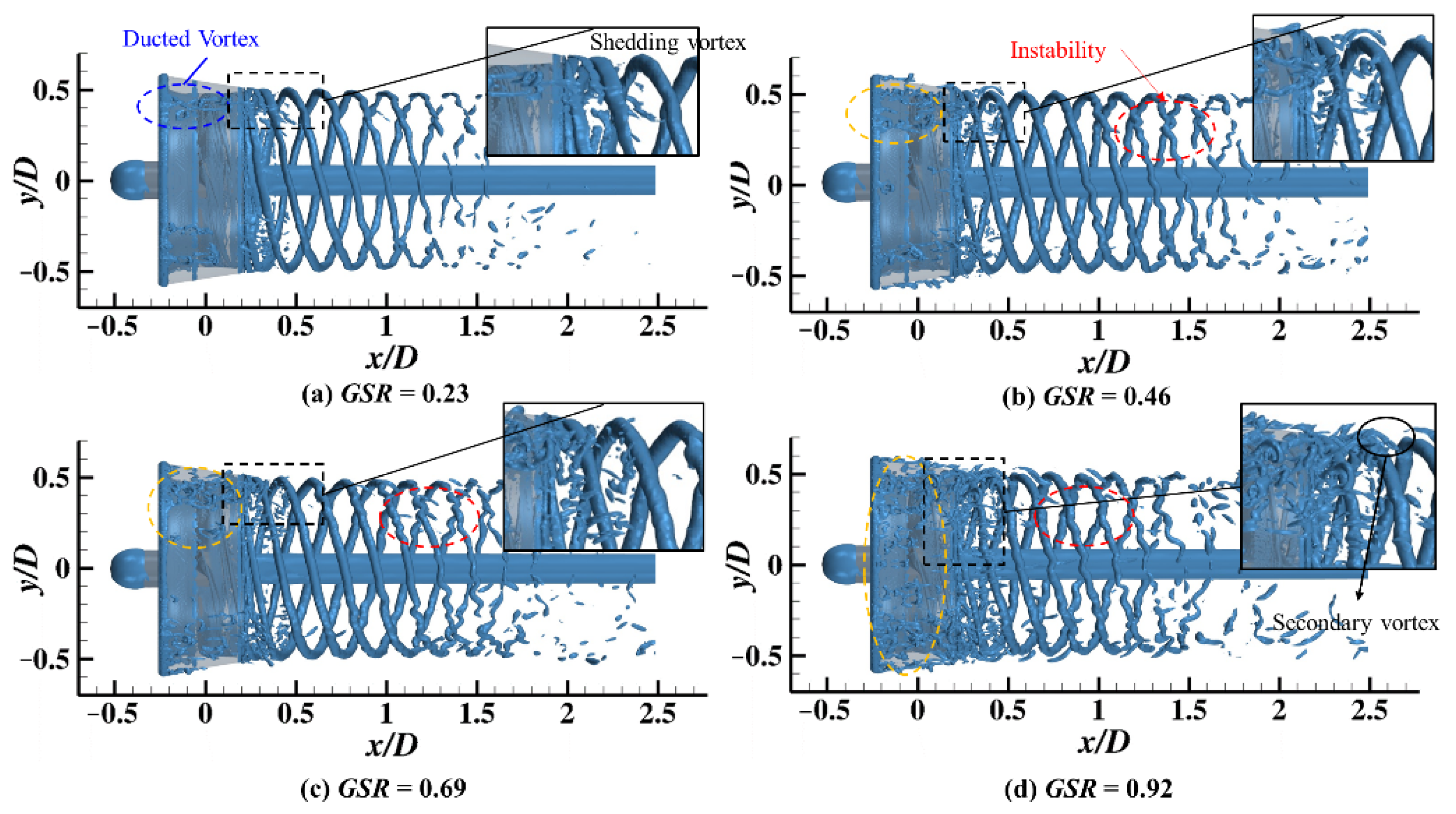
−2 isosurface was employed to capture the tail vortex region of the ducted propeller under different GSRs, and the results were compared. Complex vortex contraction in the ducted propeller wake occurred, as shown by the contours in
Figure 14. A duct vortex (DV) on the outer surface of the duct, the PTLV, the STLV, and a duct shedding vortex were produced when the duct vortex met the TLV. Based on the results of the four cases, as the GSR increased, the duct vortex tended to be significantly stronger, and the shedding vortex system became more complicated.
As shown in
Figure 14d, there were many duct extension vortices near the PTLV, and as the GSR increased, these vortices extended further. In the evolution of the interaction between the duct extension vortex system and the PTLV, a large number of secondary vortices were generated, whose number and strength increased significantly with the increase in the GSR. Therefore, the wake stability decreased. In particular, as shown in
Figure 14a, most of the energy was recovered by the duct because of the narrow tip clearance, and the energy of the TLV was not strong enough, so the TLV extension length was reduced. As shown in
Figure 14b–d, the unstable area of the TLV in the wake gradually advanced with the increase in the GSR. The unstable area appeared near
x/
D = 1.5, 1.2, and 0.9 in
Figure 14b–d, respectively. This showed that the instability of the TLV increased as the GSR increased.
The simulation results demonstrated that the unstable region of the TLV in the wake gradually advanced with the increase in the GSR, indicating that the increase in the GSR reduced the stability of the ducted propeller’s wake vortices. The comparative analysis of the four groups of ducted propeller vortices with different GSRs showed that the existence of the STLV was detrimental to the stability of the ducted propeller’s wake, and its strength increased with the increase in the GSR, which affected the stability of the ducted propeller’s wake. However, with the increase in the GSR, the DV increased significantly, which affected the duct extension vortex and weakened the stability of the TLV in the wake.
5.4. GSR’s Influence on Pressure Fluctuations
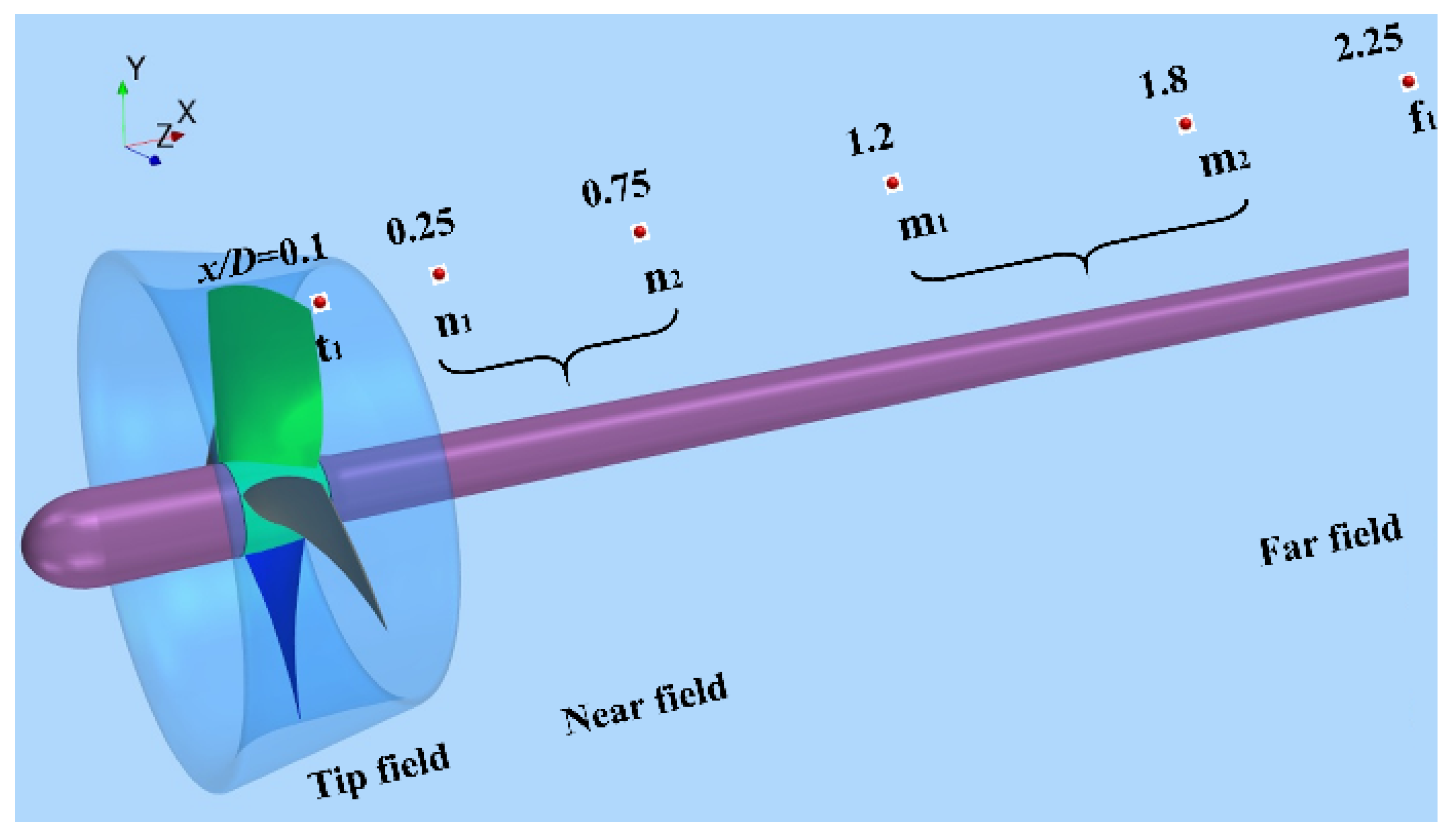
In order to study the effect of the GSR on the dynamic characteristics of the ducted propellers’ wake and the instability of the TLV, when the calculation of the ducted propellers with different GSRs reached convergence—namely, at t = 2 s—six wake detectors located at different positions of the ducted propellers’ wake were selected, and the physical quantity changes of these ducted propellers over three rotation cycles (2–2.2 s) were analyzed. Their longitudinal and circumferential positions were set to be the same—namely,
z = 0 and
y = 0.9
r—and only the axial position changed. The specific locations of the probes are shown in
Figure 15, where t
1 is the monitoring point at the blade tip, n
1 and n
2 are the near-field monitoring points, m
1 and m
2 are the mid-field monitoring points, and f
1 is the far-field monitoring point. The pressure
p and their frequency-domain distributions were calculated.
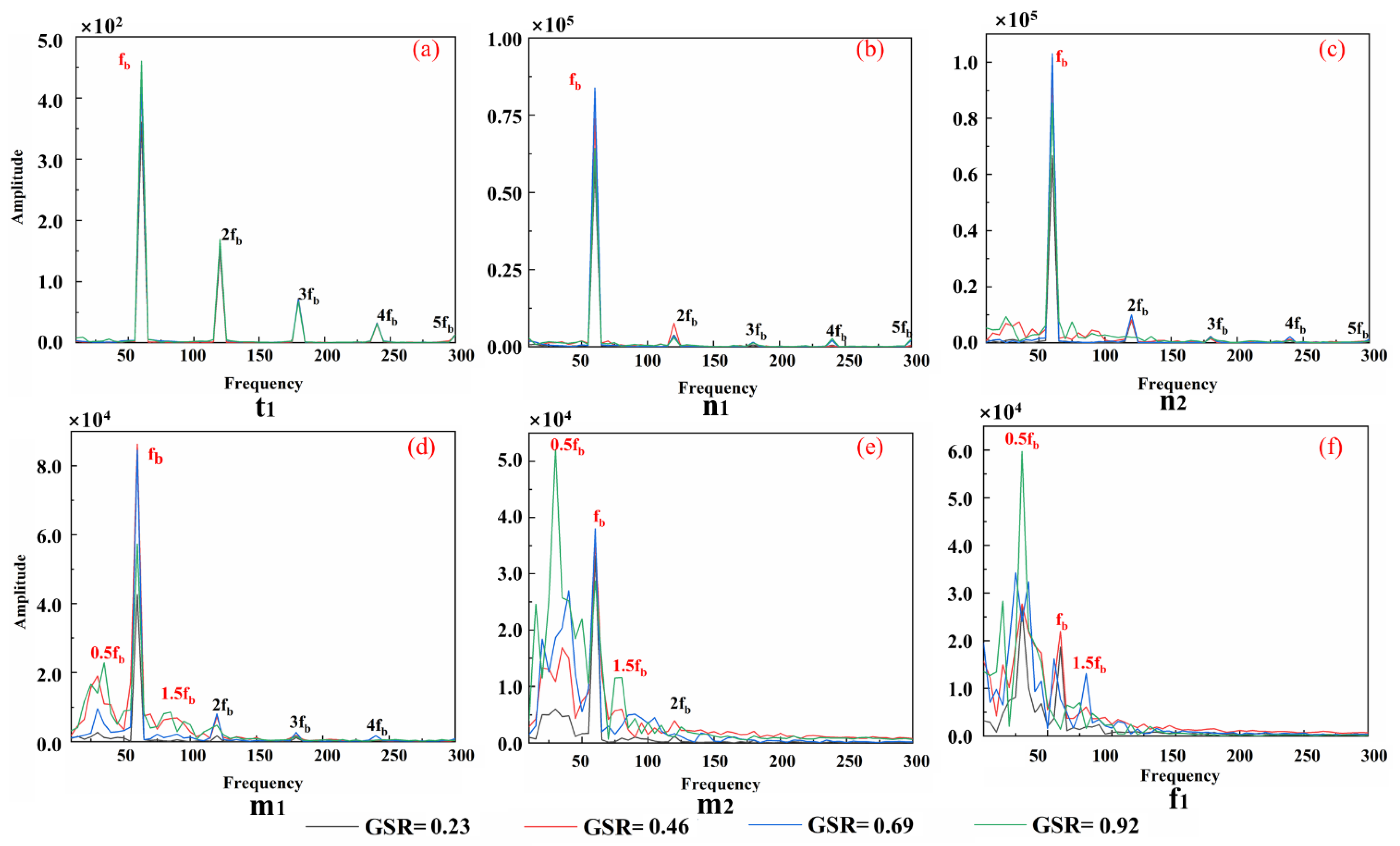
As shown in
Figure 16, overall, from the tip field to the far-field, the frequency-domain distribution of the pressure measurement points mainly underwent two changes: (1) From the tip area to the near-field, the pressure frequency distribution shifted from
nfb to
fb, (where
n = 2,3,4,5…), which was the main blade frequency. It was preliminarily inferred that this was due to the gradual dissipation of the STLV or its interaction with the PTLV. (2) From the near-field to the far-field, the main frequency of the pressure shifted from the main blade frequency to lower frequencies, including 0.5
fb and 0.25
fb, as a consequence of the vortex structure’s evolution in the far-field. Due to the short-wave instability of the TLV, a large number of secondary vortices were generated, and their shedding frequency was irregular.
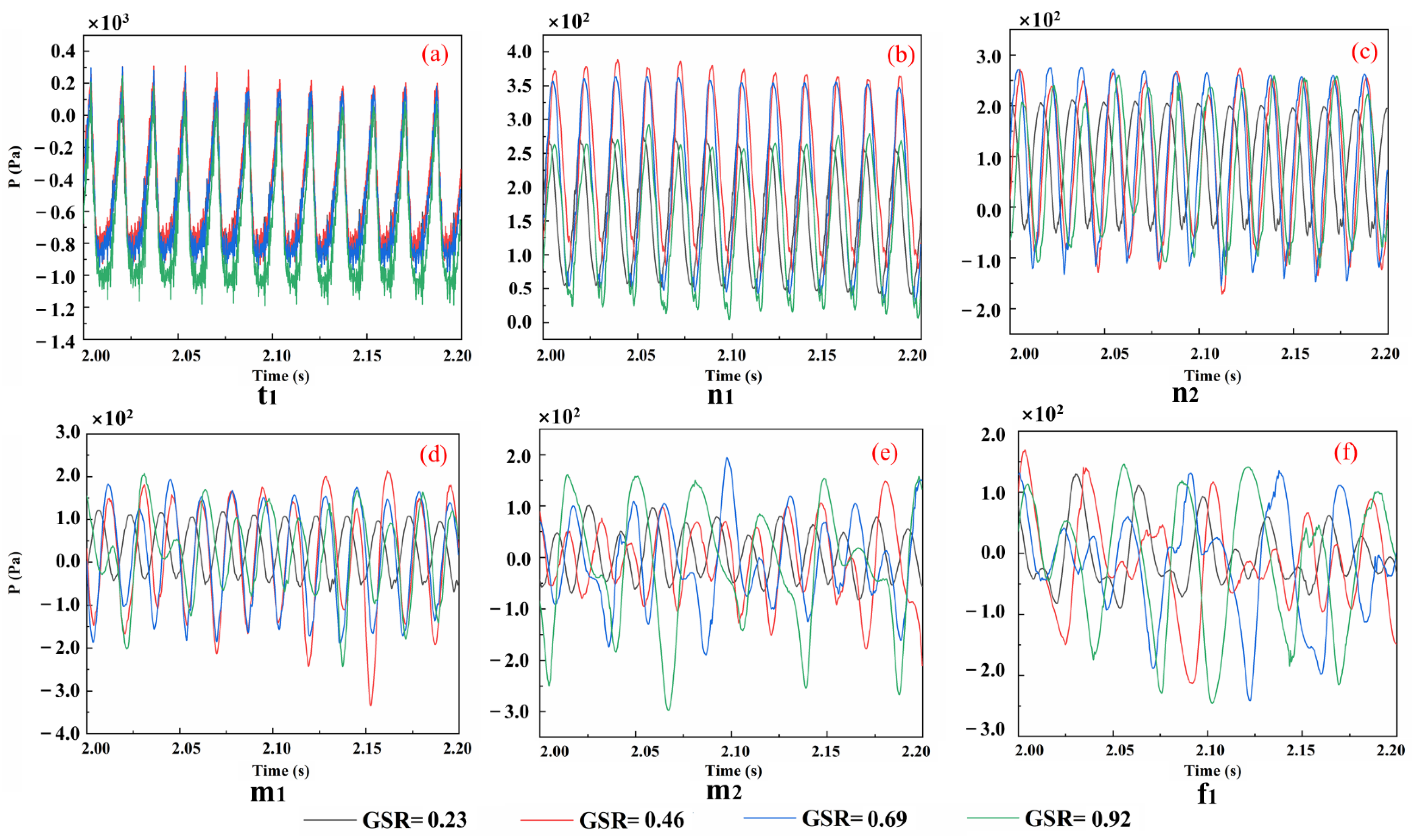
At the tip monitoring point t
1, the GSR’s influence on pressure mainly manifested in its fluctuation amplitude, as shown in
Figure 17a. With the increase in the GSR, the pressure fluctuation amplitude gradually increased, indicating that the TLV stability decreased with the increase in the GSR. Overall, a significant peak at
nfb was observed in the pressure spectrum, indicating that the main characteristic frequency of the tip vortex of the ducted blade was the blade-passing frequency. In the near-field, the pressure fluctuation amplitude increased with the increase in the GSR; in the mid-field, while GSR = 0.46 and 0.92, the process of the frequency shifting from
fb to low frequency was more significant; in the mid-field and far-field, with the increase in the GSR, the stability decreased, and the transition area from
fb to the low frequency was advanced. At the same monitoring point, the amplitude of the low blade frequency increased relatively as the GSR increased. When GSR = 0.92, the pressure frequency amplitude had a sharp peak at 0.5
fb, and exceeded the peak values of
fb in m
2 and f
1.
In summary, the evolution of the ducted propeller’s wake in the far-field is mainly the decomposition and dissipation of the TLV, which is caused by the TLV’s instability and the effect of the vortex on the outer edge of the duct. As the GSR increases, the TLV instability increases, and the process of transferring pressure fluctuations of the main blade frequency to the low frequency is accelerated.
5.5. GSR’s Influence on Power Spectral Density
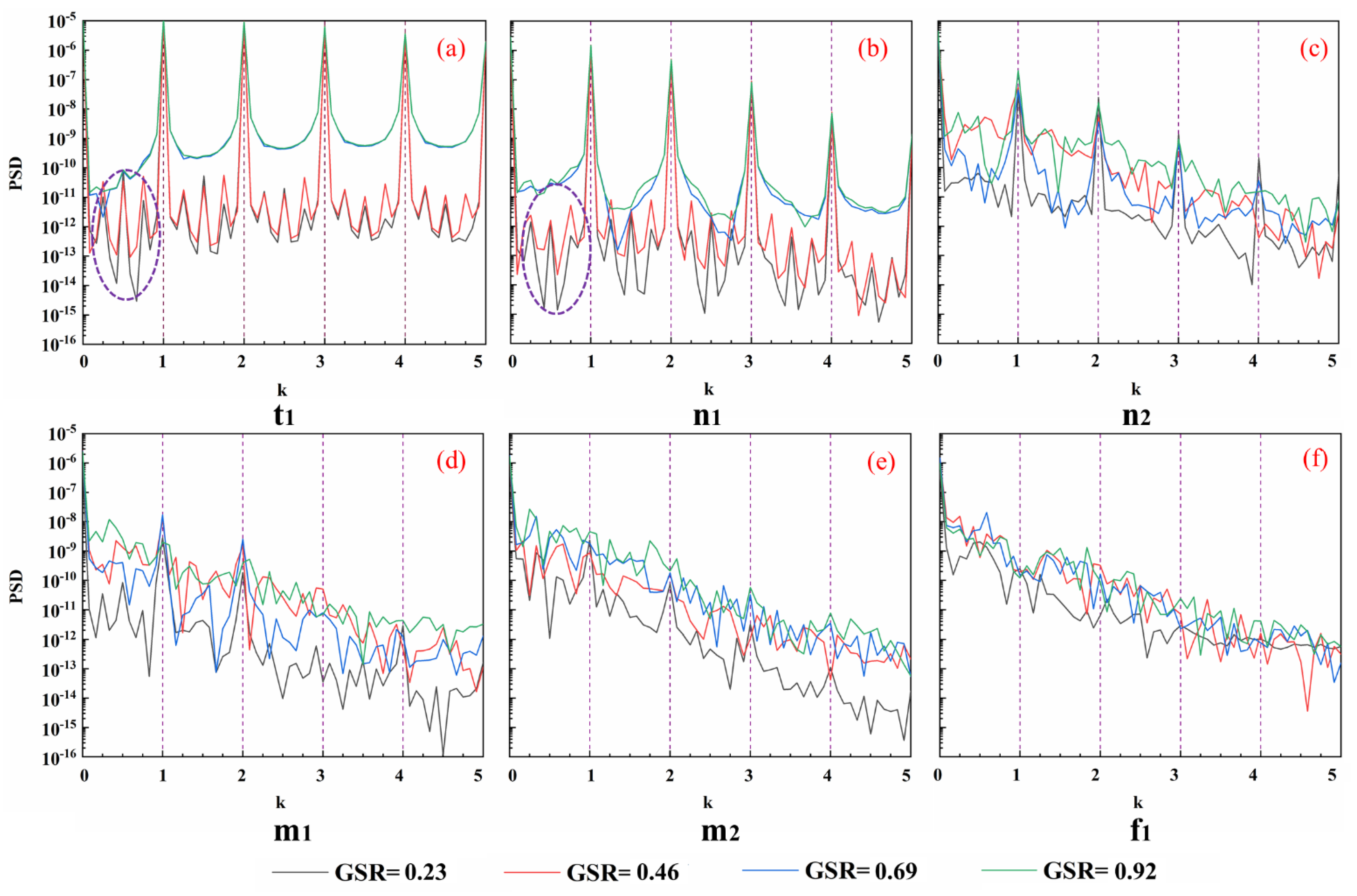
PSD analysis was carried out to determine the GSR’s influence on the energy distribution and the dynamic development of the ducted propeller’s wake.
The PSD distributions followed a similar behavior to the pressure distributions described above, as shown in
Figure 18. From the near-field to the mid-field, the PSD distribution frequency spike also gradually shifted from
nfb to
fb, (where
n = 2, 3, 4, 5…). In the blade-tip area and the near-field, due to the GSR’s difference, a significant impact on the frequency distribution was observed, as shown in
Figure 19a. At t
1, the frequency distribution was divided into two groups: GSR = 0.23, and GSR = 0.46, 0.69, and 0.92. There were significant frequency spikes between the harmonic frequencies of the main leaf frequency when the GSR was small, and when it increased to 0.69 and 0.92 there was no evident spike in the frequency distribution between the harmonic frequencies of the main leaf frequency
fb. The preliminary speculation is that when the GSR of the ducted propeller was small, the effect of the duct extension vortices and the TLV was more significant. In particular, when GSR > 0.5, the interaction was no longer significant, due to the distance relationship.
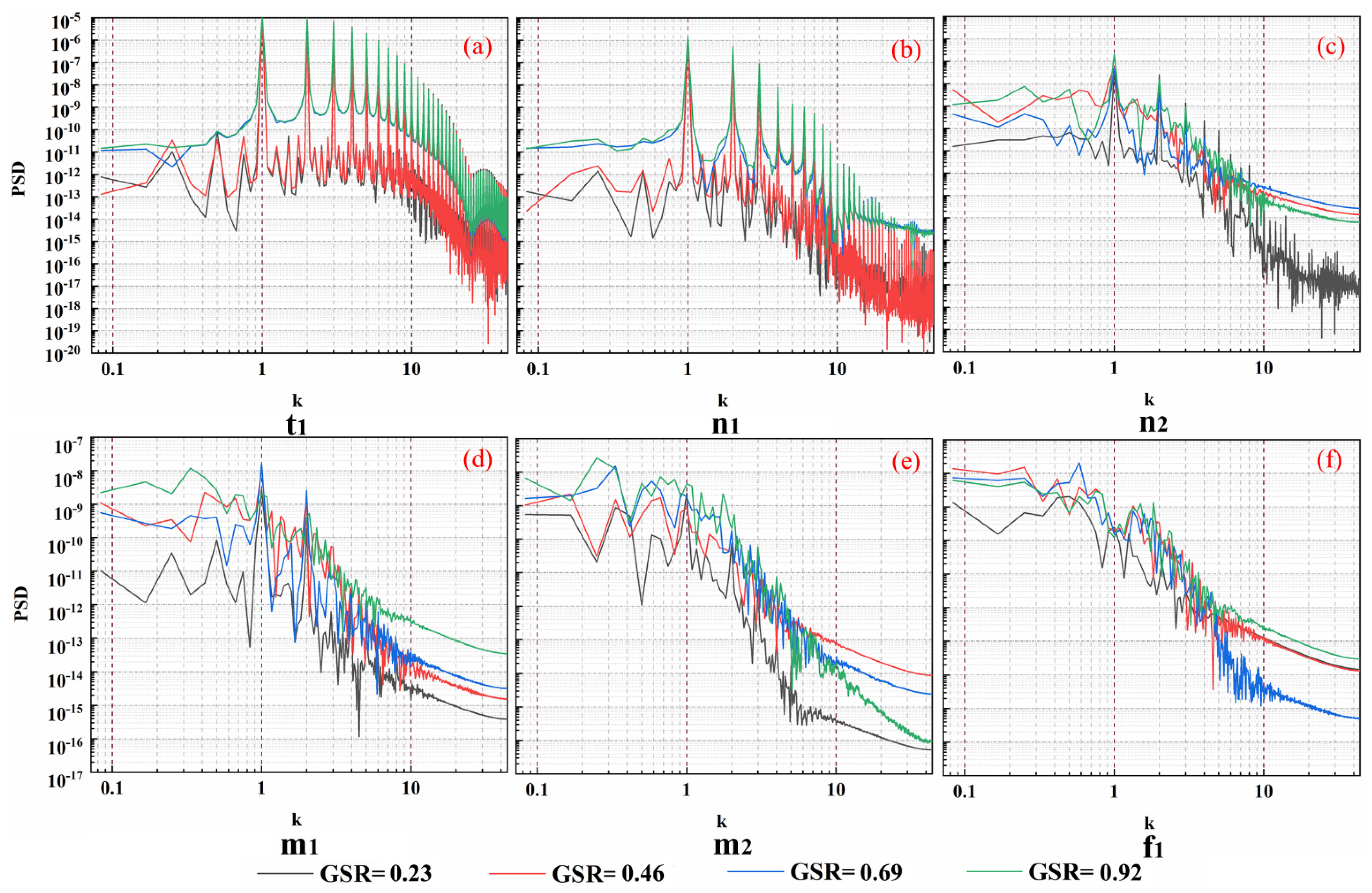
The horizontal axis was made dimensionless using the blade-passing frequency, which was the main blade frequency, as follows:
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}