
Study on Position and Shape Effect of the Wings on Motion of Underwater Gliders

 , , ,
, , ,
Abstract
:1. Introduction
2. Dynamics of the Glider
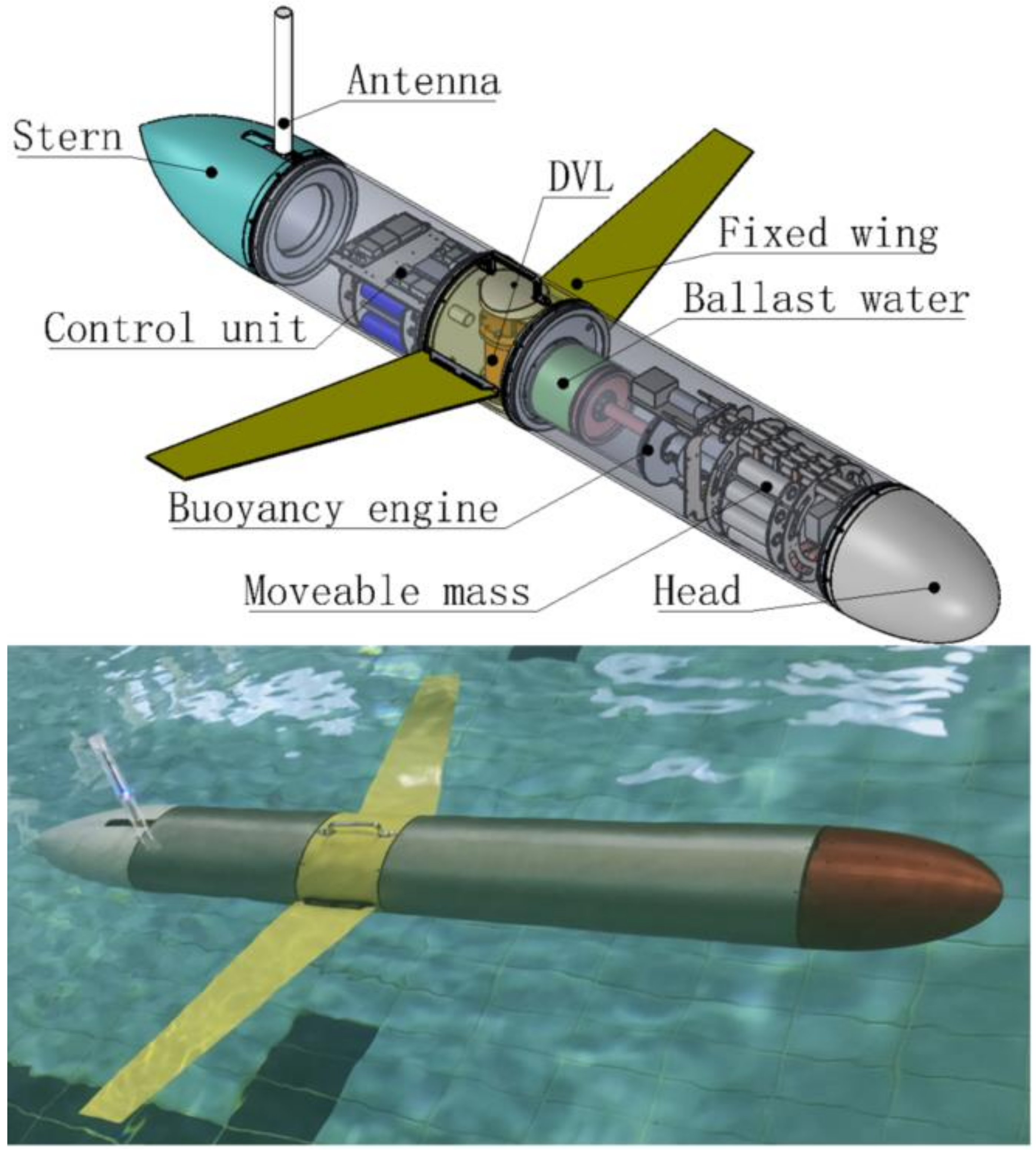
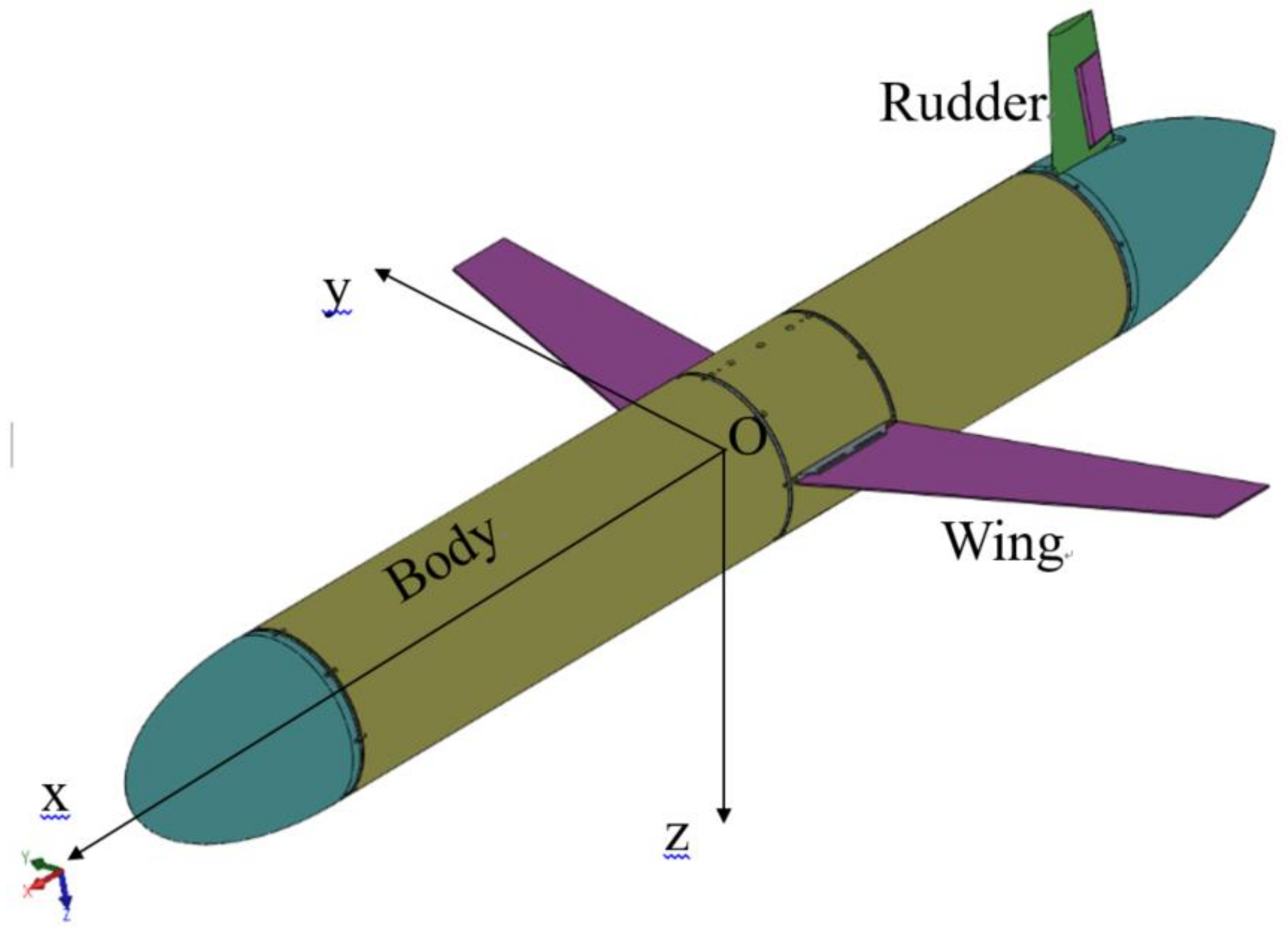
2.1. Structure of the UG
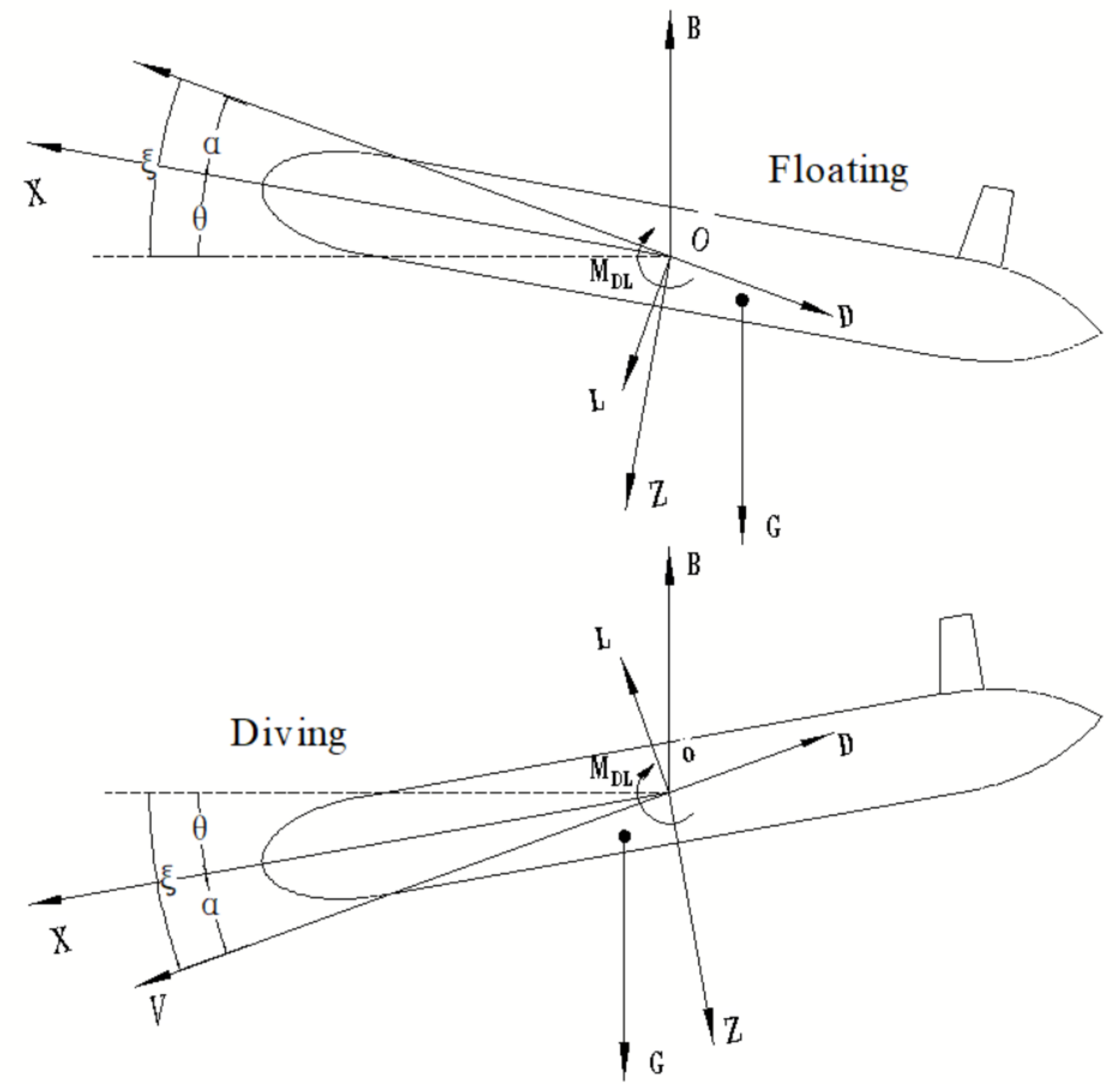
2.2. Glider Dynamics
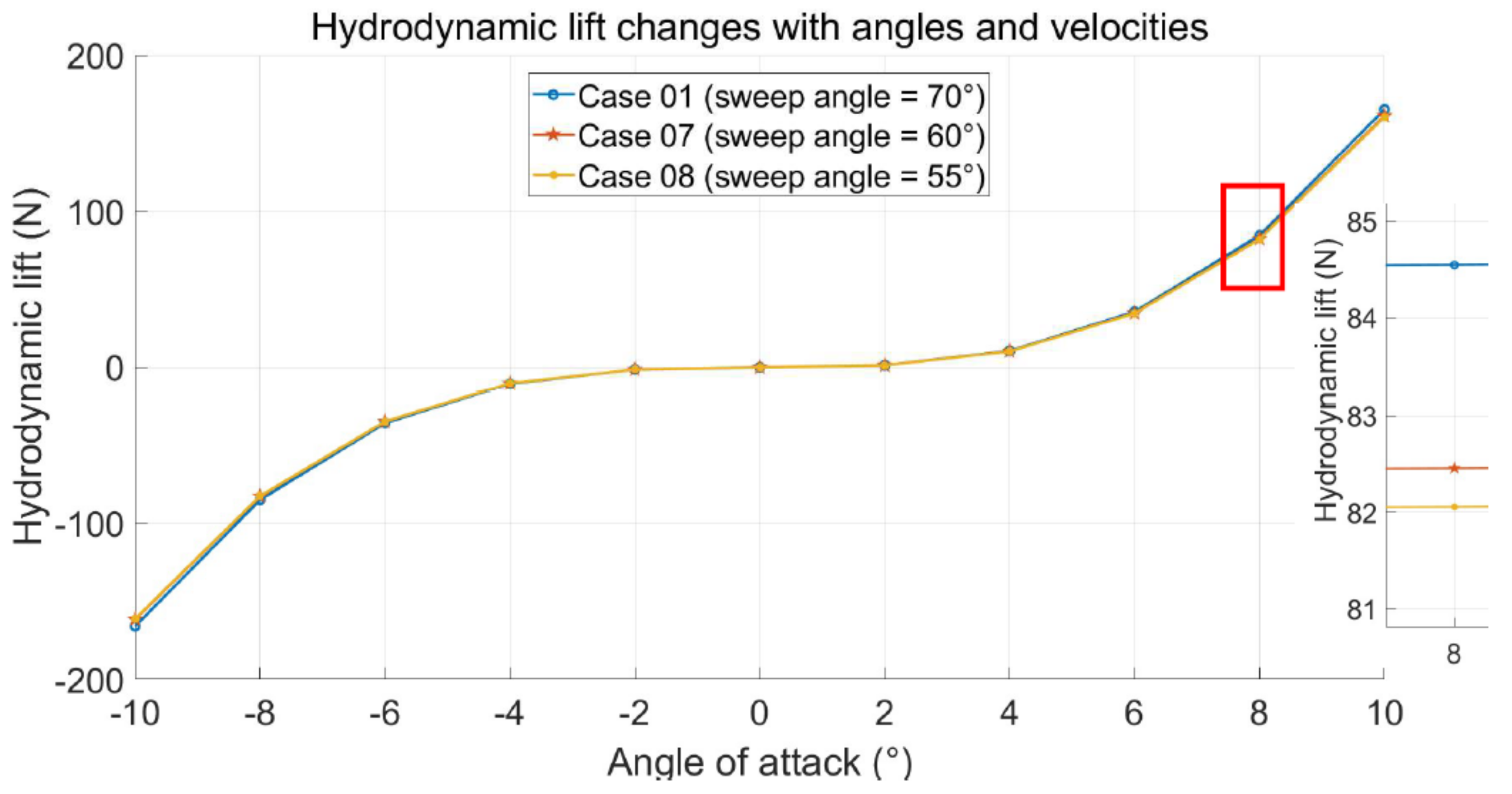
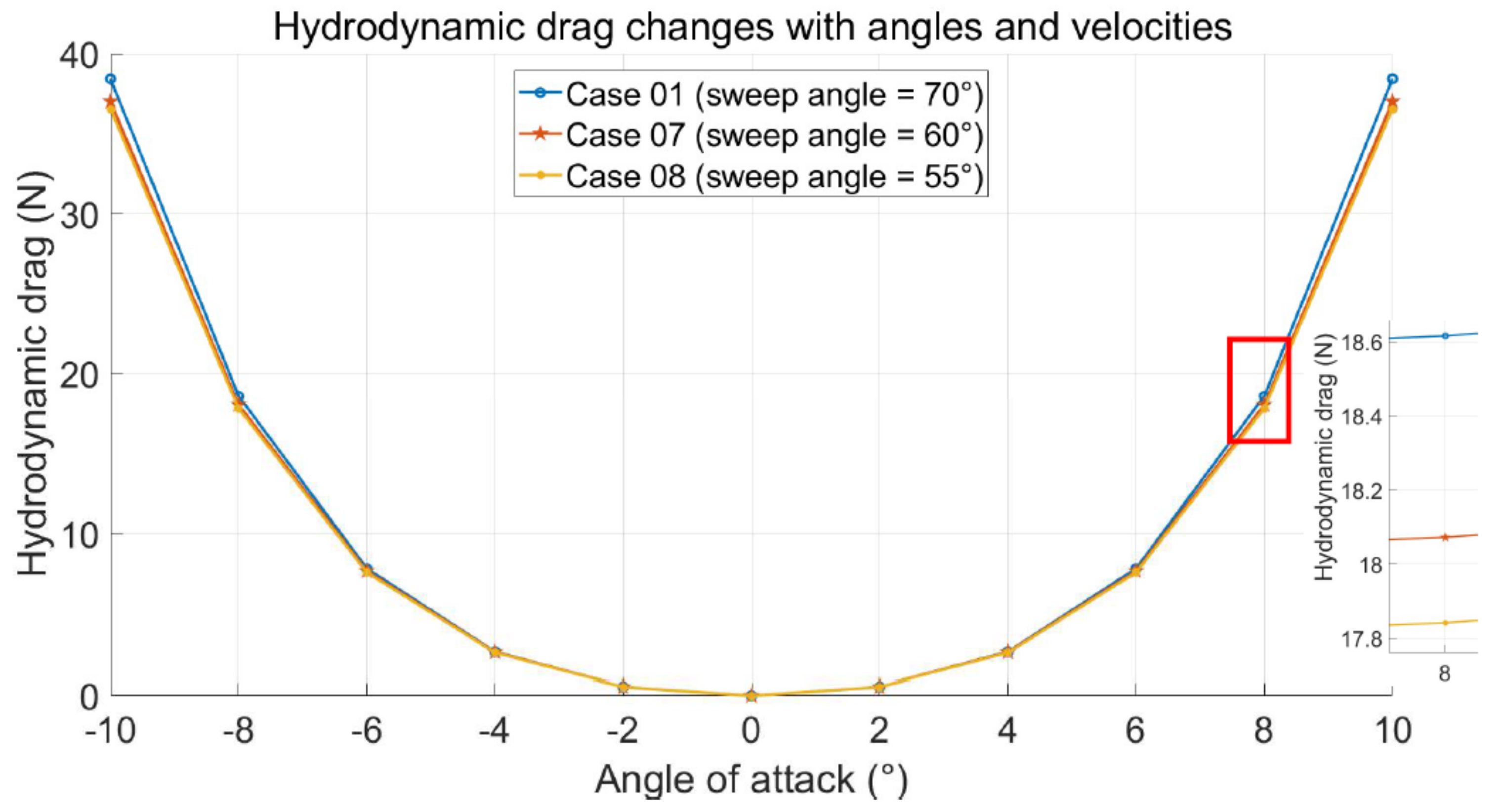
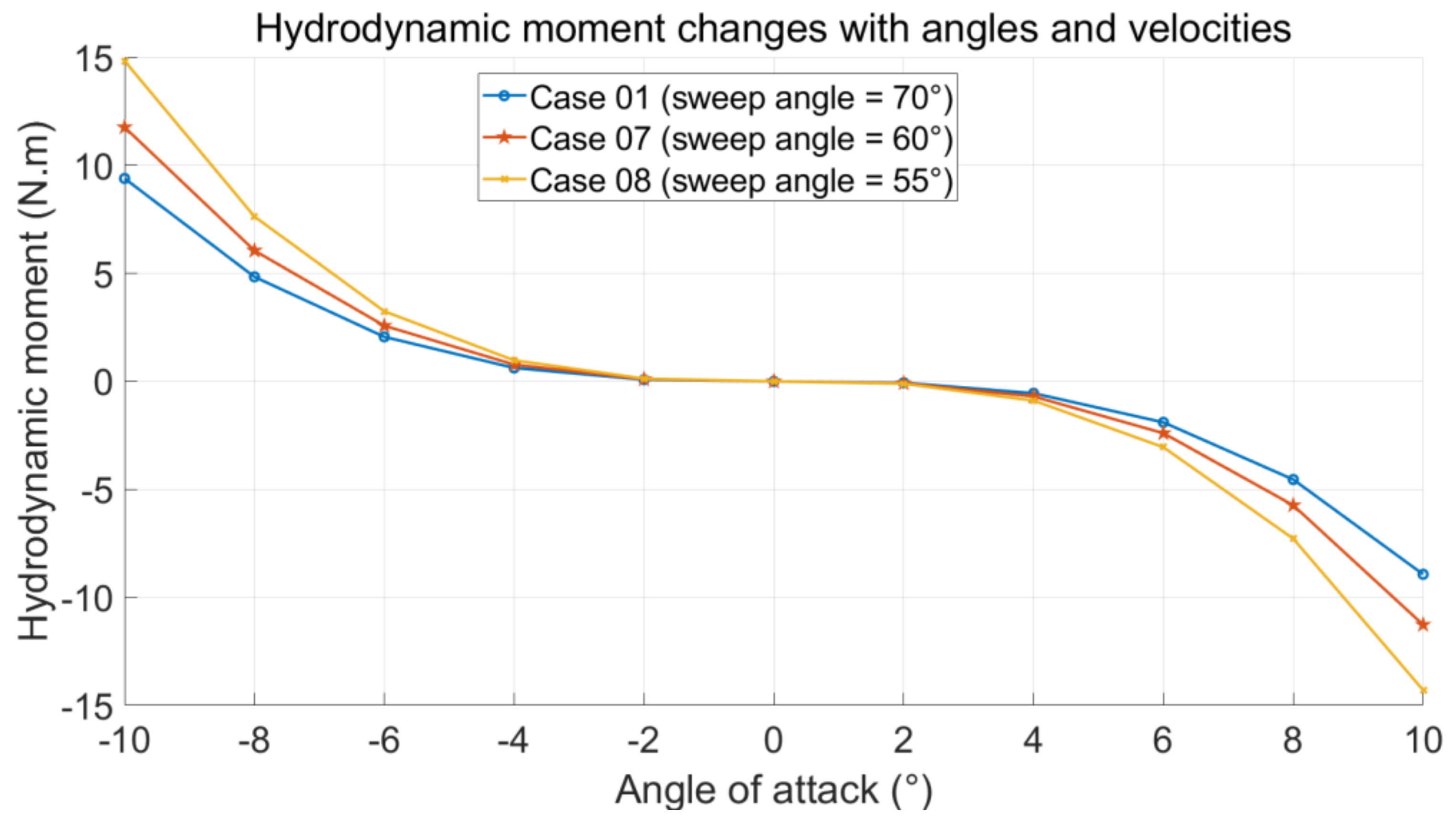
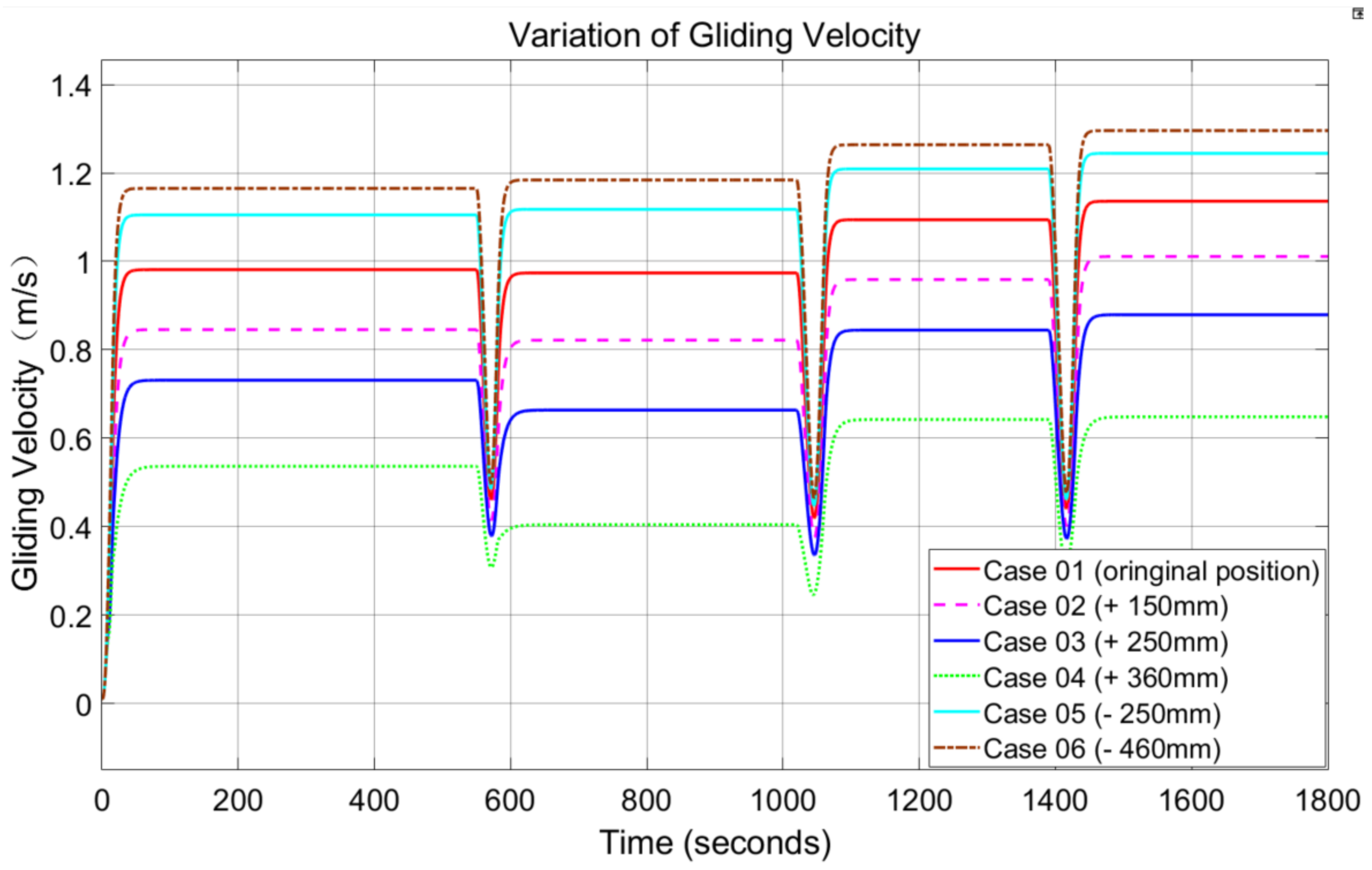
3. Wing Position and Shape Effect on Glide Motion
4. Linearization of the Equations of Motion near the Operating Point
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Graver, J.G. Underwater Gliders: Dynamics, Control and Design. Ph.D. Thesis, Princeton University, Candidacy, NJ, USA, 2005. [Google Scholar]
- Hussain, N.A.A.; Arshad, M.R.; Mohd-Mokhtar, R. Underwater glider modelling and analysis for net buoyancy, depth and pitch angle control. Ocean. Eng. 2011, 38, 1782–1791, ISSN 0029-8018. [Google Scholar] [CrossRef]
- Ji, D.H.; Choi, H.S.; Kang, J.I.; Cho, H.J.; Joo, M.G.; Lee, J.H. Design and control of hybrid underwater glider. Adv. Mech. Eng. 2019, 11, 1–9. [Google Scholar] [CrossRef]
- Joo, M.G.; Qu, Z. An autonomous underwater vehicle as an underwater glider and its depth control. Int. J. Control Autom. Syst. 2015, 13, 1212–1220. [Google Scholar] [CrossRef]
- Isa, K.; Arshad, M.R. Vertical motion simulation and analysis of USM underwater glider. In Proceedings of the 5th International Conference on Automation, Robotics and Applications, Wellington, New Zealand, 6–8 December 2011; pp. 139–144. [Google Scholar] [CrossRef]
- Zihao, W.; Ye, L.; Aobo, W.; Xiaobing, W. Flying wing underwater glider: Design, analysis, and performance prediction. In Proceedings of the 2015 International Conference on Control, Automation and Robotics, Colmar, France, 21–23 July 2015; pp. 74–77. [Google Scholar] [CrossRef]
- Haitao, G.U.; Yang, L.I.N.; Zhiqiang, H.U.; Jiancheng, Y.U. Surrogate Models Based Optimization Methods for the Design of Underwater Glider Wing. J. Mech. Eng. 2009, 45, 7–14. [Google Scholar] [CrossRef]
- Javaid, M.Y.; Ovinis, M.; Hashim, F.B.; Maimun, A.; Ahmed, Y.M.; Ullah, B. Effect of wing form on the hydrodynamic characteristics and dynamic stability of an underwater glider. Int. J. Nav. Archit. Ocean. Eng. 2017, 9, 382–389. [Google Scholar] [CrossRef] [Green Version]
- Meyers, L.M.; Msomi, V. Hydrodynamic analysis of an underwater glider wing using ANSYS fluent as an investigation tool. Mater. Today Proc. 2021, 45, 5456–5461. [Google Scholar] [CrossRef]
- Xu, S.; Liu, Y.; Zhu, Y.; Wang, Y. Effects of Airfoil on Flight Performance of Autonomous Underwater Gliders. China Mech. Eng. 2017, 28, 286. [Google Scholar]
- Singh, Y.; Bhattacharyya, S.K.; Idichandy, V.G. CFD approach to modelling, hydrodynamic analysis and motion characteristics of a laboratory underwater glider with experimental results. J. Ocean. Eng. Sci. 2017, 2, 90–119, ISSN 2468-0133. [Google Scholar] [CrossRef]
- Lyu, D.; Song, B.; Pan, G.; Yuan, Z.; Li, J. Winglet effect on hydrodynamic performance and trajectory of a blended-wing-body underwater glider. Ocean. Eng. 2019, 188, 106303. [Google Scholar] [CrossRef]
- Javaid, M.Y.; Ovinis, M.; Hashim, F.B.M.; Maimun, A.; Ali, S.S.A.; Ahmed, S.A. Investigation on the dynamic stability of an underwater glider using CFD simulation. In Proceedings of the 2016 IEEE International Conference on Underwater System Technology: Theory and Applications (USYS), Penang, Malaysia, 13–14 December 2016; pp. 230–235. [Google Scholar] [CrossRef]
- Liu, F.; Wang, Y.; Niu, W.; Ma, Z.; Liu, Y. Hydrodynamic performance analysis and experiments of a hybrid underwater glider with different layout of wings. In Proceedings of the Oceans 2014–Taipei, Taipei, Taiwan, 7–14 April 2014. [Google Scholar]
- Wang, Y.; Zhang, Y.; Zhang, M.; Yang, Z.; Wu, Z. Design and flight performance of hybrid underwater glider with controllable wings. Int. J. Adv. Robot. Syst. 2017, 14, 172988141770356. [Google Scholar] [CrossRef] [Green Version]
- Huang, J.; Choi, H.-S.; Jung, D.-W.; Lee, J.-H.; Kim, M.-J.; Choo, K.-B.; Cho, H.-J.; Jin, H.-S. Design and Motion Simulation of an Underwater Glider in the Vertical Plane. Appl. Sci. 2021, 11, 8212. [Google Scholar] [CrossRef]
- Eichhorn, M.; Aragon, D.; Shardt, Y.A.; Roarty, H. Modeling for the performance of navigation, control and data post-processing of underwater gliders. Appl. Ocean. Res. 2020, 101, 102191, ISSN 0141-1187. [Google Scholar] [CrossRef]
- Jo, S.; Jeong, S.; Choi, H.; Jeong, D. Design of a new high speed unmanned underwater glider and motion control. In Proceedings of the Oceans 2016–Shanghai, Shanghai, China, 10–13 April 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Jeong, S.K.; Choi, H.S.; Bae, J.H.; You, S.S.; Kang, H.S.; Lee, S.J.; Kim, J.Y.; Kim, D.H.; Lee, Y.K. Design and control of high speed unmanned underwater glider. Int. J. Precis. Eng. Manuf.-Green Technol. 2016, 3, 273–279. [Google Scholar] [CrossRef]
- Da Silva Tchilian, R.; Rafikova, E.; Gafurov, S.A.; Rafikov, M. Optimal Control of an Underwater Glider Vehicle. Procedia Eng. 2017, 176, 732–740, ISSN 1877-7058. [Google Scholar] [CrossRef]
- Mahmoudian, N.; Woolsey, C. Underwater glider motion control. In Proceedings of the 2008 47th IEEE Conference on Decision and Control, Cacun, Mexico, 9–11 December 2008; pp. 552–557. [Google Scholar] [CrossRef]
- Leonard, N.E.; Graver, J.G. Model-based feedback control of autonomous underwater gliders. IEEE J. Ocean. Eng. 2001, 26, 633–645. [Google Scholar] [CrossRef] [Green Version]
- Latifa, U.; Putri, T.W.O.; Trilaksono, B.R.; Hidayat, E.M.I. Modelling, identification, and simulation of autonomous underwater glider in longitudinal plane for control purpose. In Proceedings of the 2017 2nd International Conference on Control and Robotics Engineering (ICCRE), Bangkok, Thailand, 1–3 April 2017; pp. 140–144. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Term | Description |
|---|---|
| The horizontal displacement in the vertical plane | |
| The vertical displacement in the vertical plane | |
| The velocity of glider along the x-axis in the body-fixed frame | |
| The velocity of glider along the z-axis in the body-fixed frame | |
| The angle of pitch | |
| The pitch angular velocity rotating about the y-axis of the body-fixed frame | |
| The mass of glider (with added mass) in x-axis | |
| The mass of glider (with added mass) in z-axis | |
| The momenta of moveable mass along x-axis | |
| The momenta of moveable mass along z-axis | |
| The momenta of piston along x-axis | |
| The momenta of piston along z-axis | |
| Net buoyancy mass | |
| Hydrodynamic lift | |
| Hydrodynamic drag | |
| Angle of attack | |
| The force acting on the moveable mass in the x-direction | |
| The force acting on the moveable mass in the z-direction | |
| The force acting on the piston in the x-direction | |
| The force acting on the piston in the z-direction | |
| The moment of inertia rotating about the y-axis (without moveable mass and piston) | |
| Position of moveable mass in the x direction | |
| Position of moveable mass in the z direction | |
| Position of piston in the x direction | |
| Position of piston in the z direction | |
| Mass of the glider | |
| Position of gravity center in the x direction | |
| Position of gravity center in the z direction | |
| Hydrodynamic moment | |
| The displacement of moveable mass along x direction | |
| The displacement of piston along x direction | |
| The ballast water per meter | |
| Gliding angle | |
| Mass of moveable mass | |
| Mass of piston | |
| The total moment of inertia of glider rotating about the y-axis | |
| Initial position of movable mass along x-axis | |
| Initial position of piston along x-axis | |
| Mass of static equilibrium | |
| Initial mass of ballast in neutral state | |
| Initial position of ballast water along x-axis (equilibrium) | |
| Density of water | |
| Radius of piston | |
| Maximum buoyancy of glider | |
| Position of moveable mass in the z direction | |
| Position of piston in the z direction | |
| Position of static equilibrium mass in the z direction | |
| Position of ballast water in the z direction |
| Case 01 | −0.1934 | 10.5922 | 7.9796 | 0.1662 | 0.148 | −0.5864 |
| Case 02 | −0.2634 | 10.6413 | 8.1597 | 0.1651 | 0.1824 | 0.8145 |
| Case 03 | −0.0963 | 10.5608 | 8.0809 | 0.1632 | 0.1614 | 1.7979 |
| Case 04 | −0.1152 | 10.4261 | 8.1831 | 0.1598 | 0.134 | 2.8886 |
| Case 05 | −0.3027 | 10.7426 | 8.1182 | 0.1652 | 0.2274 | −3.1496 |
| Case 06 | −0.5554 | 10.657 | 8.0642 | 0.1674 | 0.4025 | −5.10375 |
| Case 07 | −0.1091 | 10.3208 | 8.0697 | 0.1563 | 0.1597 | −0.737 |
| Case 08 | −0.2144 | 10.2841 | 7.9619 | 0.1566 | 0.1747 | −0.9321 |
| Case 01 | Case 02 | Case 03 | Case 04 | Case 05 | Case 06 | ||
|---|---|---|---|---|---|---|---|
| Diving | 0.01852 | 0.01896 | 0.01874 | 0.019 | 0.01883 | 0.01878 | |
| 0.04036 | 0.04522 | 0.04858 | 0.05255 | 0.03163 | 0.02498 | ||
| Surfacing | −0.01847 | −0.01889 | −0.01872 | −0.01897 | −0.01875 | −0.01864 | |
| −0.03888 | −0.04307 | −0.04626 | −0.04998 | −0.03085 | −0.02476 | ||
| (m) | (m) | Glide Angle (°) | Glide Velocity (m/s) | |
|---|---|---|---|---|
| Case 01 | 0.087 | 0.0605 | −35.1 | 1.0295 |
| Case 02 | 0.093 | 0.08 | −33.78 | 1.033 |
| Case 03 | 0.1 | 0.08 | −26.5 | 0.9535 |
| Case 04 | 0.1 | 0.08 | −17.7 | 0.7464 |
| Case 05 | 0.087 | 0.024 | −36 | 1.033 |
| Case 06 | 0.087 | −0.004 | −35.8 | 1.032 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, J.; Choi, H.-S.; Vu, M.T.; Jung, D.-W.; Choo, K.-B.; Cho, H.-J.; Nam Anh, P.H.; Zhang, R.; Park, J.-H.; Kim, J.-Y.; et al. Study on Position and Shape Effect of the Wings on Motion of Underwater Gliders. J. Mar. Sci. Eng. 2022, 10, 891. https://doi.org/10.3390/jmse10070891
Huang J, Choi H-S, Vu MT, Jung D-W, Choo K-B, Cho H-J, Nam Anh PH, Zhang R, Park J-H, Kim J-Y, et al. Study on Position and Shape Effect of the Wings on Motion of Underwater Gliders. Journal of Marine Science and Engineering. 2022; 10(7):891. https://doi.org/10.3390/jmse10070891
Chicago/Turabian StyleHuang, Jiafeng, Hyeung-Sik Choi, Mai The Vu, Dong-Wook Jung, Ki-Beom Choo, Hyun-Joon Cho, Phan Huy Nam Anh, Ruochen Zhang, Jung-Hyeun Park, Joon-Young Kim, and et al. 2022. "Study on Position and Shape Effect of the Wings on Motion of Underwater Gliders" Journal of Marine Science and Engineering 10, no. 7: 891. https://doi.org/10.3390/jmse10070891