
Dexterity Based Viscous Resistance Optimization of a Deep-Sea Manipulator

Abstract
:1. Introduction
- (1)
- A dynamic dexterity evaluation method of the deep-sea manipulator is proposed. This method considers the kinematic and dynamic characteristic of the deep-sea manipulator.
- (2)
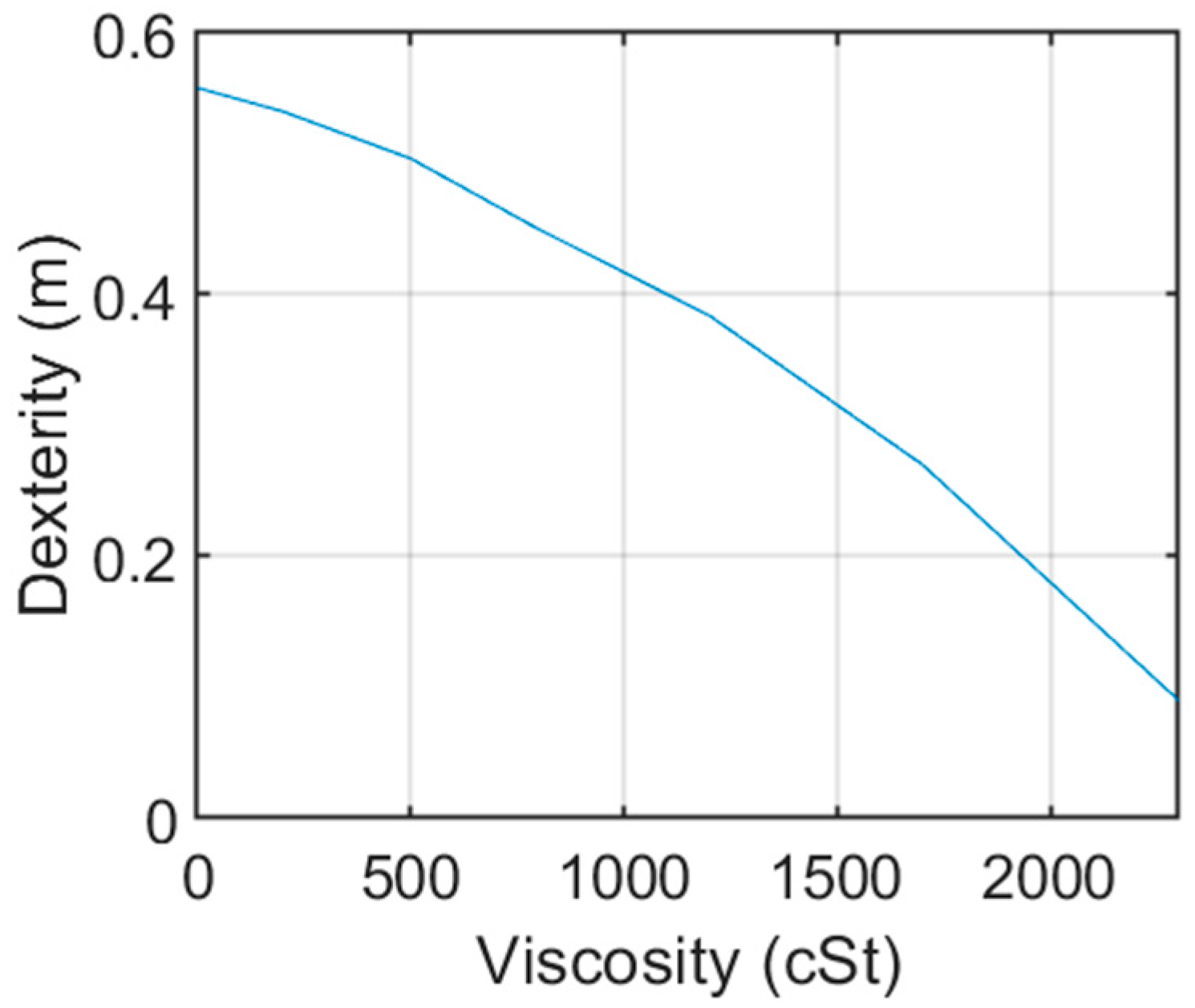
- The effect of compensating oil viscosity on dexterity is studied. A practical viscous resistance optimization method is proposed.
- (3)
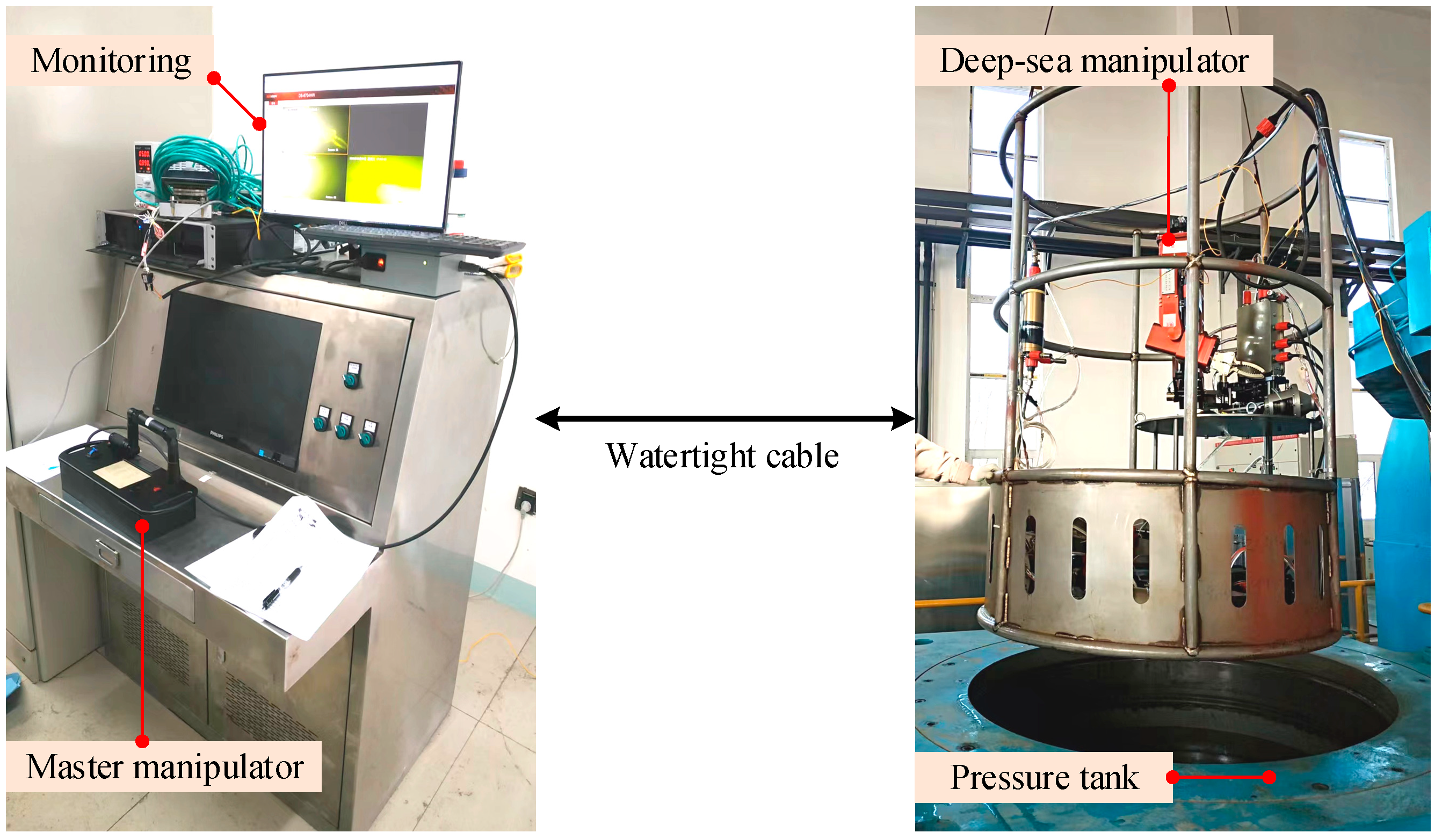
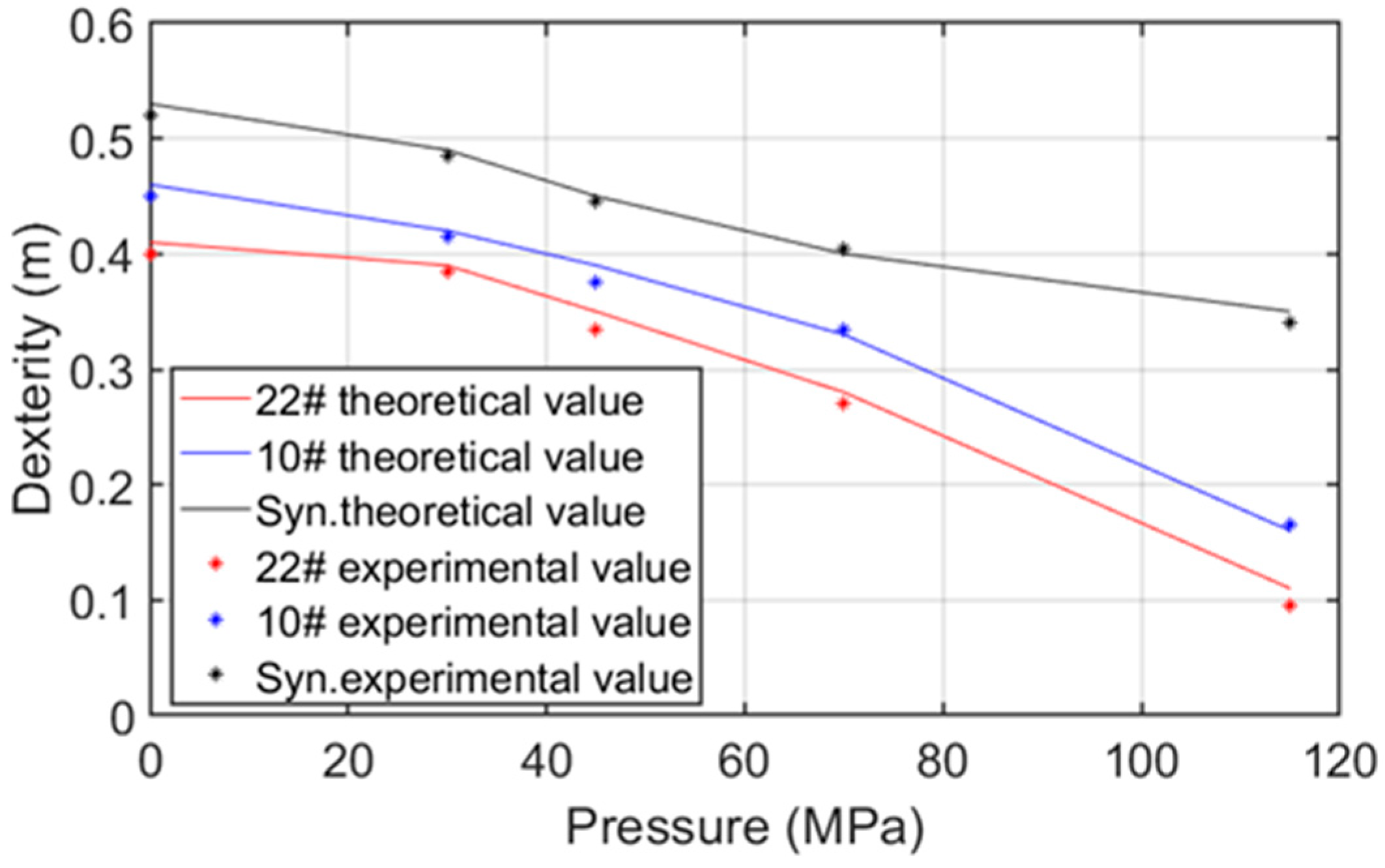
- The method proposed in this paper is verified by a simulated deep-sea experiment.
2. Mathematical Model
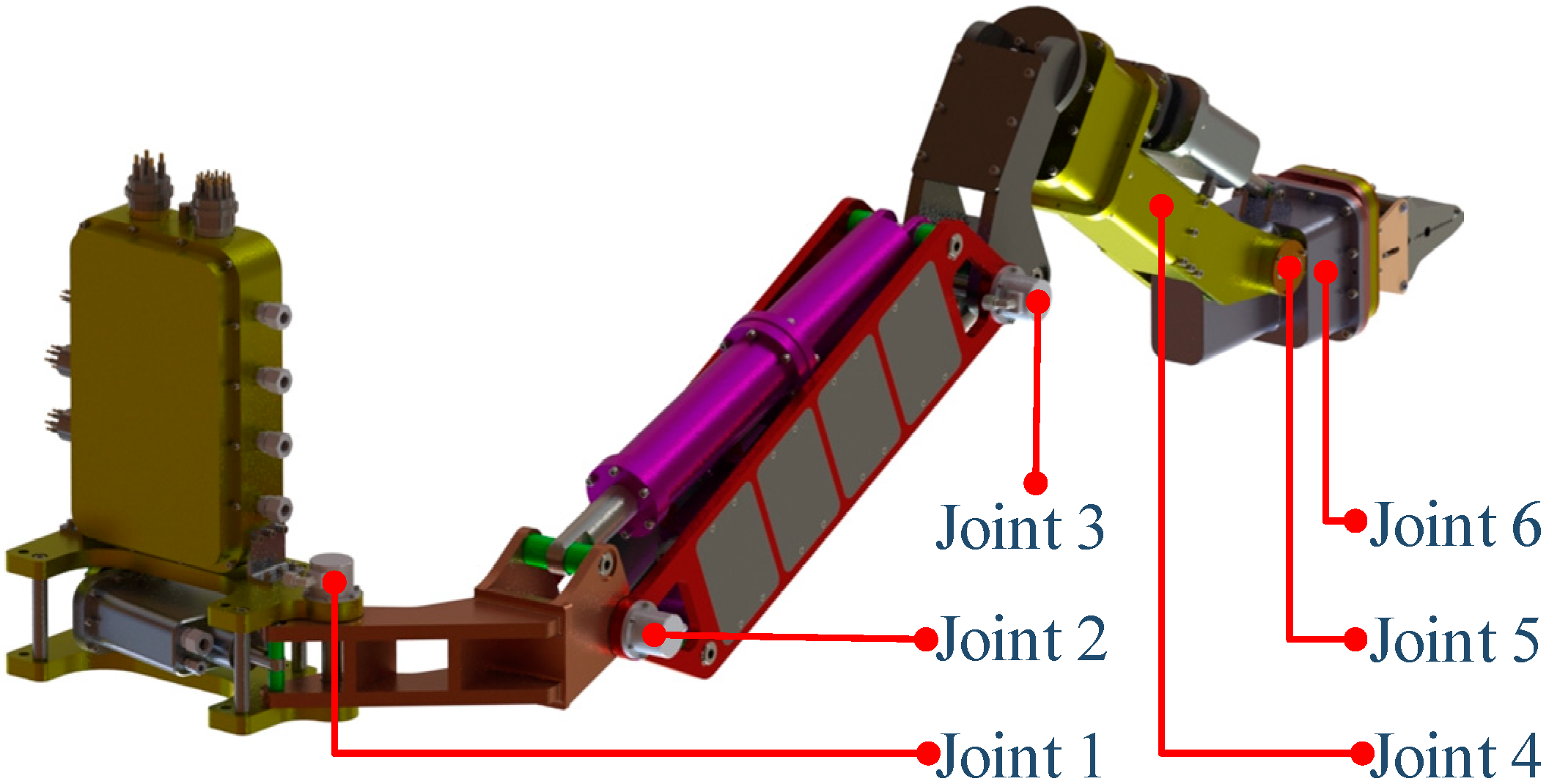
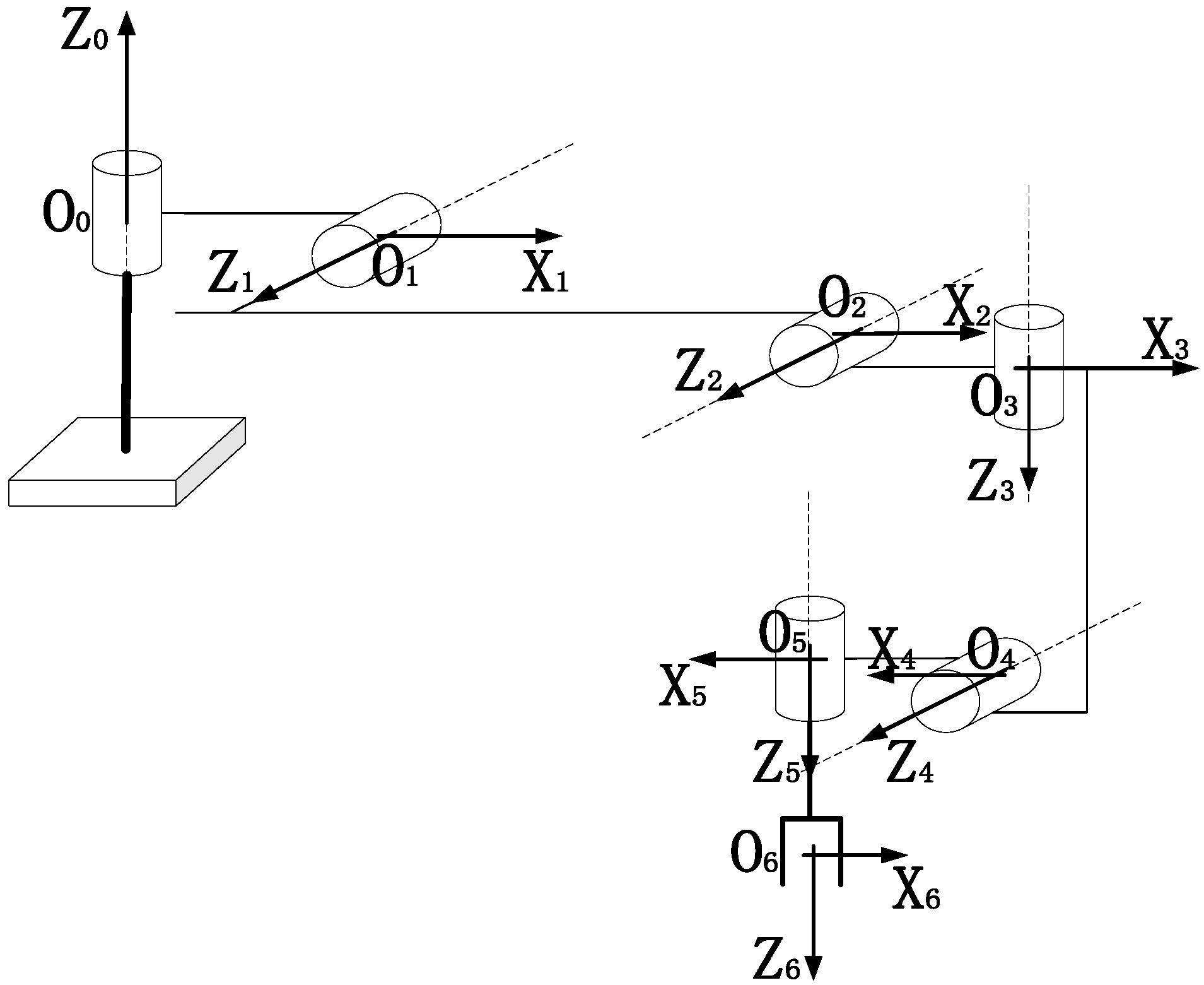
2.1. Kinematics Modelling of the Deep-Sea Manipulator
2.2. Dynamic Modelling of the Deep-Sea Manipulator
3. Dynamic Dexterity Evaluation Method
3.1. Dynamic Manipulability
3.2. Dynamic Torque Boundary
3.3. Dynamic Dexterity with Jacobian Mapping Constraint
3.4. Dynamic Dexterity Ellipsoid and Dynamic Dexterity Measure
4. Viscous Resistance Optimization
5. Experiment
5.1. Experimental Method
5.2. Experimental Results
6. Conclusions and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Stuart, H.; Wang, S.; Khatib, O.; Cutkosky, M.R. The Ocean One hands: An adaptive design for robust marine manipulation. Int. J. Robot. Res. 2017, 36, 150–166. [Google Scholar] [CrossRef]
- Ribas, D.; Ridao, P.; Turetta, A.; Melchiorri, C.; Palli, G.; Fernandez, J.J.; Sanz, P.J. I-AUV Mechatronics Integration for the TRIDENT FP7 Project. IEEE/ASME Trans. Mechatron. 2015, 20, 2583–2592. [Google Scholar] [CrossRef]
- Manley, J.E.; Halpin, S.; Radford, N.; Ondler, M. Aquanaut: A New Tool for Subsea Inspection and Intervention. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Ding, N.; Tang, Y.; Jiang, Z.; Bai, Y.; Liang, S. Station-Keeping Control of Autonomous and Remotely-Operated Vehicles for Free Floating Manipulation. J. Mar. Sci. Eng. 2021, 9, 1305. [Google Scholar] [CrossRef]
- Sivčev, S.; Coleman, J.; Omerdic, E.; Dooly, G.; Toal, D. Underwater manipulators: A review. Ocean Eng. 2018, 163, 431–450. [Google Scholar] [CrossRef]
- Fan, Y.; Zhang, Q.; Wang, H.; Bai, Y.; Zhang, Y.; Cui, S. Design and Experiments of a 11000m 7-Function Electric Manipulator System. In Proceedings of the OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Yunfei, B.; Qifeng, Z.; Yunlong, F.; Xinbao, Z.; Qiyan, T.; Yuangui, T.; Aiqun, Z. Trajectory planning of deep-sea electric manipulator based on energy optimization. Robot 2020, 42, 301–308. [Google Scholar]
- Bai, Y.; Zhang, Q.; Tian, Q.; Yan, S.; Tang, Y.; Zhang, A. Performance and experiment of deep-sea master-slave servo electric manipulator. In Proceedings of the CEANS 2019 MTS/IEEE, Seattle, WA, USA, 27–31 October 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Hwang, S.; Kim, H.; Choi, Y.; Shin, K.; Han, C. Design optimization method for 7 DOF robot manipulator using performance indices. Int. J. Precis. Eng. Manuf. 2017, 18, 293–299. [Google Scholar] [CrossRef]
- Nabavi, S.N.; Akbarzadeh, A.; Enferadi, J.; Kardan, I. A homogeneous payload specific performance index for robot manipulators based on the kinetic energy. Mech. Mach. Theory 2018, 130, 330–345. [Google Scholar] [CrossRef]
- Wang, N.; Zhang, Z.; Zhang, X. International Conference on Intelligent Robotics and Applications; Springer: Cham, Switzerland, 2017; pp. 554–563. [Google Scholar] [CrossRef]
- Sotiropoulos, P.; Aspragathos, N. Neural networks to determine task oriented dexterity indices for an underwater vehicle-manipulator system. Appl. Soft Comput. 2016, 49, 352–364. [Google Scholar] [CrossRef]
- Albiez, J.; Hildebrandt, M.; Kerdels, J.; Kirchner, F. Automatic workspace analysis and vehicle adaptation for hydraulic underwater manipulators. In Proceedings of the OCEANS 2009, Biloxi, MS, USA, 26–29 October 2009; pp. 1–6. [Google Scholar] [CrossRef]
- Asokan, T.; Seet, G.; Lau, M.; Low, E. Optimum positioning of an underwater intervention robot to maximise workspace manipulability. Mechatronics 2005, 15, 747–766. [Google Scholar] [CrossRef]
- Patel, S.; Sobh, T. Manipulator Performance Measures - A Comprehensive Literature Survey. J. Intell. Robot. Syst. 2015, 77, 547–570. [Google Scholar] [CrossRef] [Green Version]
- Xu, R.; Luo, J.; Wang, M. Kinematic and dynamic manipulability analysis for free-floating space robots with closed chain constraints. Robot. Auton. Syst. 2020, 130, 103548. [Google Scholar] [CrossRef]
- Li, Y.; Jiao, Z.; Yu, T.; Shang, Y. Viscous Loss Analysis of the Flooded Electro-Hydrostatic Actuator Motor under Laminar and Turbulent Flow States. Processes 2020, 8, 975. [Google Scholar] [CrossRef]
- Pirrò, D.; Quadrio, M. Direct numerical simulation of turbulent Taylor–Couette flow. Eur. J. Mech. B/Fluids 2008, 27, 552–566. [Google Scholar] [CrossRef] [Green Version]
- Bai, Y.; Zhang, Q.; Fan, Y.; Wang, H.; Zhang, A. Research and Experiment on Viscous Friction Power Loss of Deep-Sea Electric Manipulator. In Proceedings of the OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Cai, M.; Wu, S.; Yang, C. Effect of Low Temperature and High Pressure on Deep-Sea Oil-Filled Brushless DC Motors. Mar. Technol. Soc. J. 2016, 50, 83–93. [Google Scholar] [CrossRef]
- Deng, D. A Numerical and Experimental Investigation of Taylor Flow Instabilities in Narrow Gaps and Their Relationship to Turbulent Flow in Bearings. Ph.D. Thesis, Akron University, Ahron, OH, USA, 2007. [Google Scholar]
- Wenjuan, Q.; Jibin, Z.; Jianjun, L. Numerical calculation of viscous drag loss of oil-filled BLDC motor for underwater applications. In Proceedings of the 2010 International Conference on Electrical Machines and Systems, Incheon, Korea, 10–13 October 2010; pp. 1739–1742. [Google Scholar]
- Yuguang, Z.; Fan, Y. Dynamic modeling and adaptive fuzzy sliding mode control for multi-link underwater manipulators. Ocean Eng. 2019, 187, 106202. [Google Scholar] [CrossRef]
- Kołodziejczyk, W. Preliminary Study of Hydrodynamic Load on an Underwater Robotic Manipulator. J. Autom. Mob. Robot. Intell. Syst. 2015, 9, 11–17. [Google Scholar] [CrossRef]
- Kołodziejczyk, W. The method of determination of transient hydrodynamic coefficients for a single DOF underwater manipulator. Ocean Eng. 2018, 153, 122–131. [Google Scholar] [CrossRef]
- Takagi, H.; Nakashima, M.; Ozaki, T.; Matsuuchi, K. Unsteady hydrodynamic forces acting on a robotic arm and its flow field: Application to the crawl stroke. J. Biomech. 2014, 47, 1401–1408. [Google Scholar] [CrossRef]
- Filaretov, V.; Konoplin, A. Experimental definition of the viscous friction coefficients for moving links of multilink underwater manipulator. In Proceedings of the 26th DAAAM International Symposium on Intelligent Manufacturing and Automation, Zadar, Croatia, 21–24 October 2015; pp. 0762–0767. [Google Scholar] [CrossRef]
- McMillan, S.; Orin, D.; McGhee, R. Efficient dynamic simulation of an underwater vehicle with a robotic manipulator. IEEE Trans. Syst. Man Cybern. 1995, 25, 1194–1206. [Google Scholar] [CrossRef] [Green Version]
- McLain, T.; Rock, S. Experiments in the hydrodynamic modeling of an underwater manipulator. In Proceedings of the Symposium on Autonomous Underwater Vehicle Technology, Monterey, CA, USA, 2–6 June 1996; pp. 463–469. [Google Scholar] [CrossRef]
- Bai, Y.; Zhang, Q.; Zhang, A. Modeling and Optimization of Compensating Oil Viscous Power for a Deep-Sea Electric Manipulator. IEEE Access 2021, 9, 13524–13531. [Google Scholar] [CrossRef]
- Chiacchio, P. A new dynamic manipulability ellipsoid for redundant manipulators. Robotica 2000, 18, 381–387. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joints | q.(deg) | d.(mm) | α.(deg) | a.(mm) |
|---|---|---|---|---|
| 1 | −30~90 | 0 | 90 | 130.4 |
| 2 | −30~90 | 138.2 | 0 | 641.8 |
| 3 | −90~30 | 0 | 90 | 220.2 |
| 4 | −90~90 | 442.6 | −90 | 21.5 |
| 5 | 0~90 | 0 | 90 | −48.1 |
| 6 | −180~180 | 239.6 | 0 | 0 |
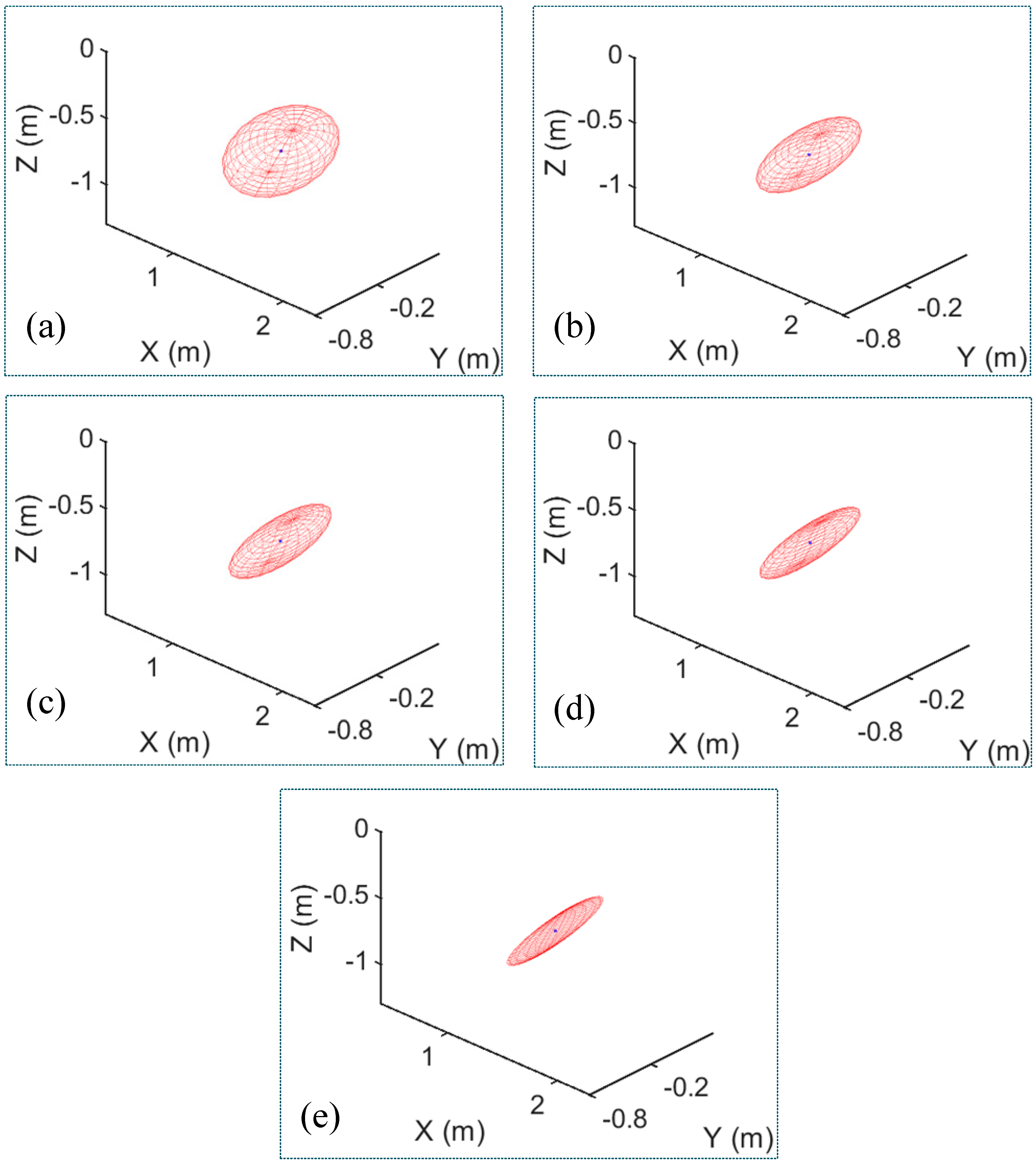
| Depth | Compensating Oil | Dynamic Dexterity Measure |
|---|---|---|
| 1 m | No | 0.52 m |
| 1 m | Yes | 0.48 m |
| 4500 m | Yes | 0.40 m |
| 7000 m | Yes | 0.27 m |
| 11,000 m | Yes | 0.11 m |
| 22# Hydraulic Oil | 10# Hydraulic Oil | Synthetic Oil | |
|---|---|---|---|
| 0 m (0 MPa) | 157 cSt | 50 cSt | 4 cSt |
| 4500 m (45 MPa) | 496 cSt | 94 cSt | 7 cSt |
| 7000 m (70 MPa) | 857 cSt | 135 cSt | 11 cSt |
| 11,000 m (110 MPa) | 2250 cSt | 270 cSt | 20 cSt |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bai, Y.; Zhang, Q.; Zhang, A. Dexterity Based Viscous Resistance Optimization of a Deep-Sea Manipulator. J. Mar. Sci. Eng. 2022, 10, 876. https://doi.org/10.3390/jmse10070876
Bai Y, Zhang Q, Zhang A. Dexterity Based Viscous Resistance Optimization of a Deep-Sea Manipulator. Journal of Marine Science and Engineering. 2022; 10(7):876. https://doi.org/10.3390/jmse10070876
Chicago/Turabian StyleBai, Yunfei, Qifeng Zhang, and Aiqun Zhang. 2022. "Dexterity Based Viscous Resistance Optimization of a Deep-Sea Manipulator" Journal of Marine Science and Engineering 10, no. 7: 876. https://doi.org/10.3390/jmse10070876