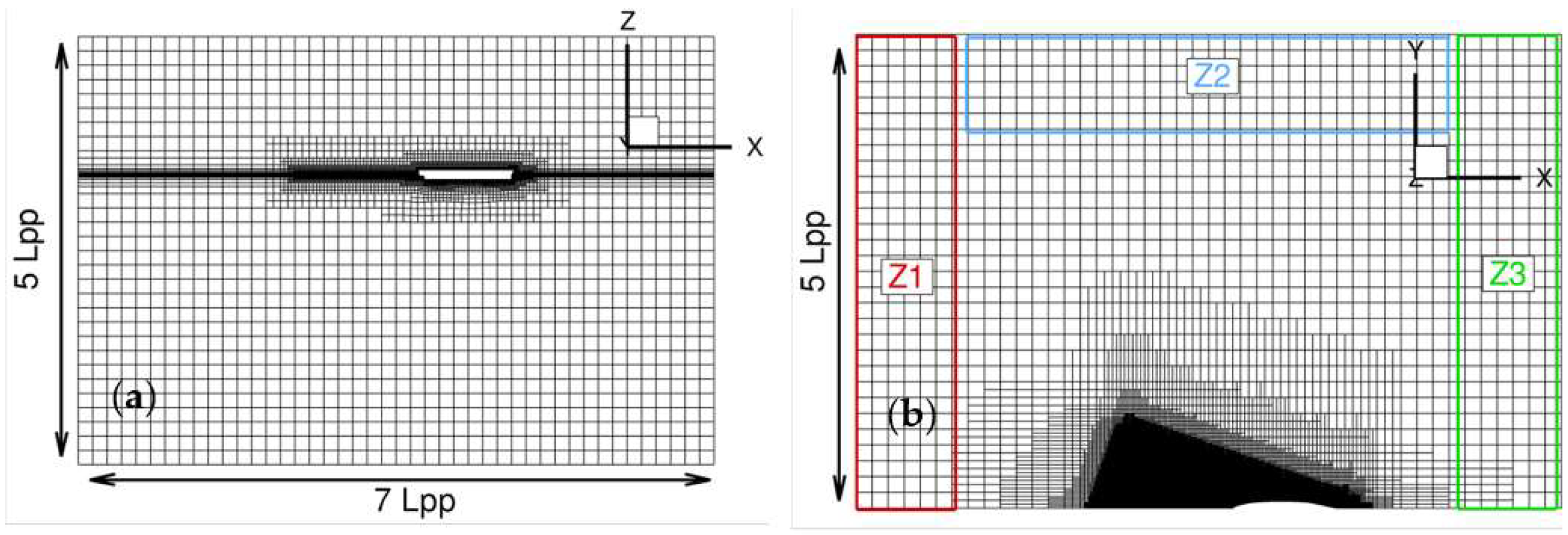
Figure 1.
Overview of the computational domain. (a) Side view and (b) top view of the grid. The forcing zones (Z1, Z2, Z3) are noted on the right figure.
Figure 1.
Overview of the computational domain. (a) Side view and (b) top view of the grid. The forcing zones (Z1, Z2, Z3) are noted on the right figure.
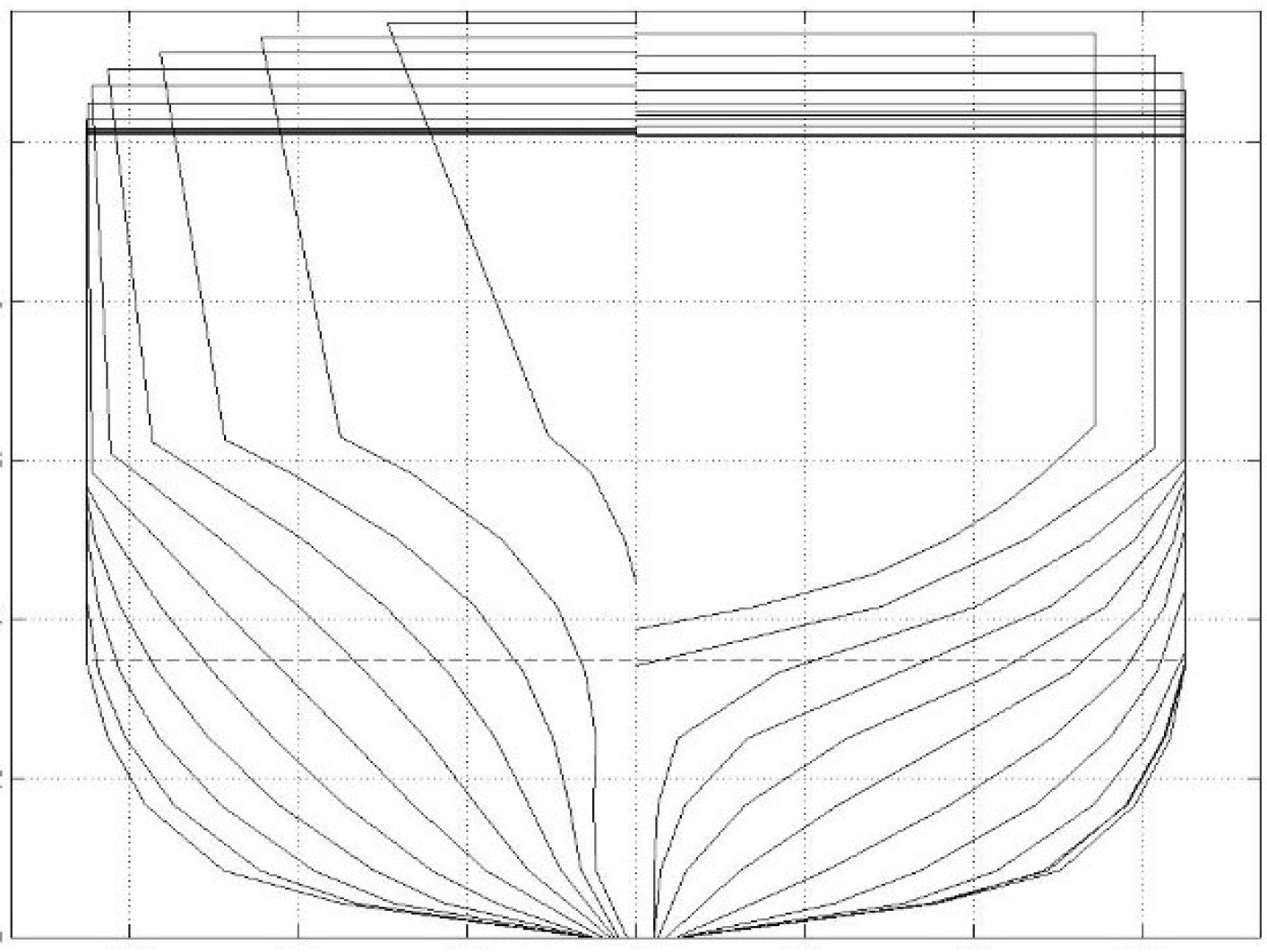
Figure 2.
Body Plan of the ferry ship hull.
Figure 2.
Body Plan of the ferry ship hull.
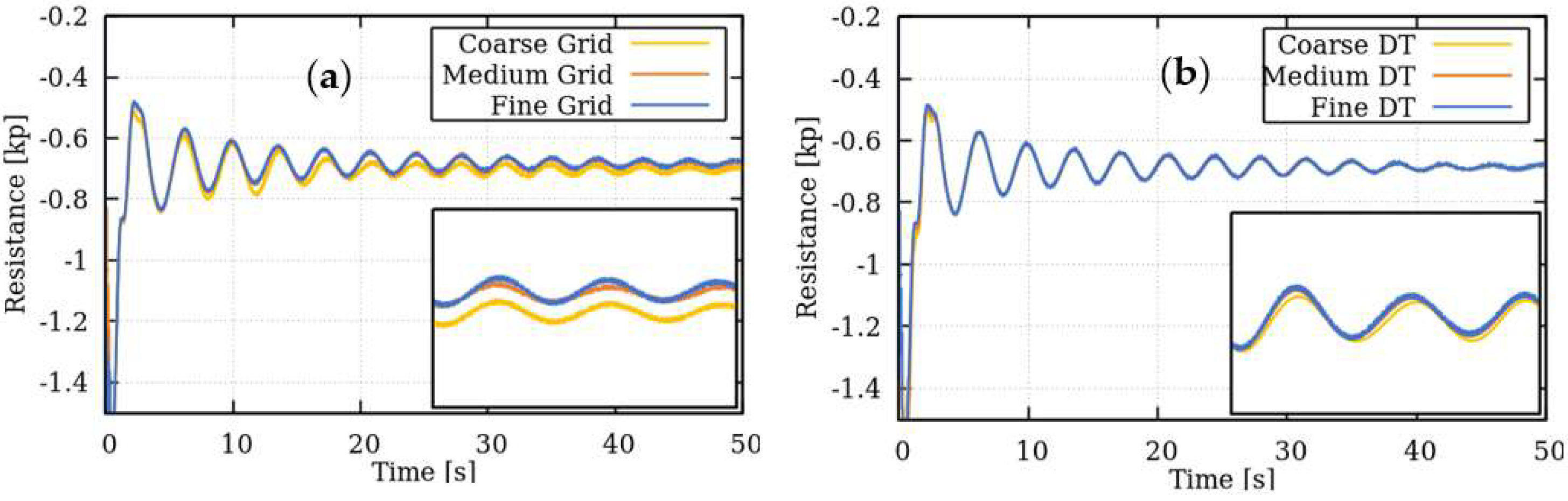
Figure 3.
(a) Grid density and (b) time-step independency study.
Figure 3.
(a) Grid density and (b) time-step independency study.
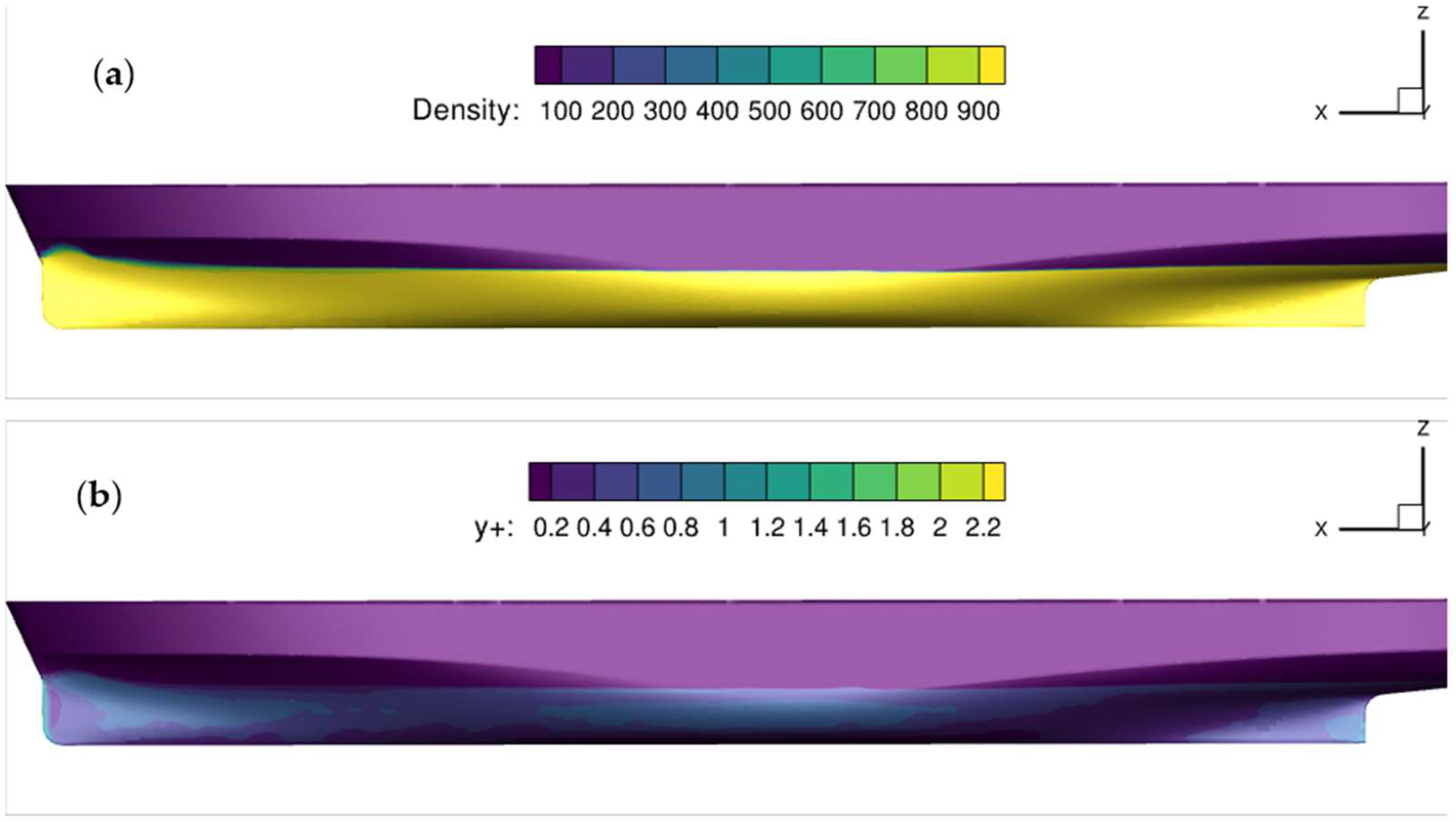
Figure 4.
(a) Free surface elevation and (b) y+ values on the ship hull in calm water conditions for draft T = 0.135 m and Fn = 0.25.
Figure 4.
(a) Free surface elevation and (b) y+ values on the ship hull in calm water conditions for draft T = 0.135 m and Fn = 0.25.
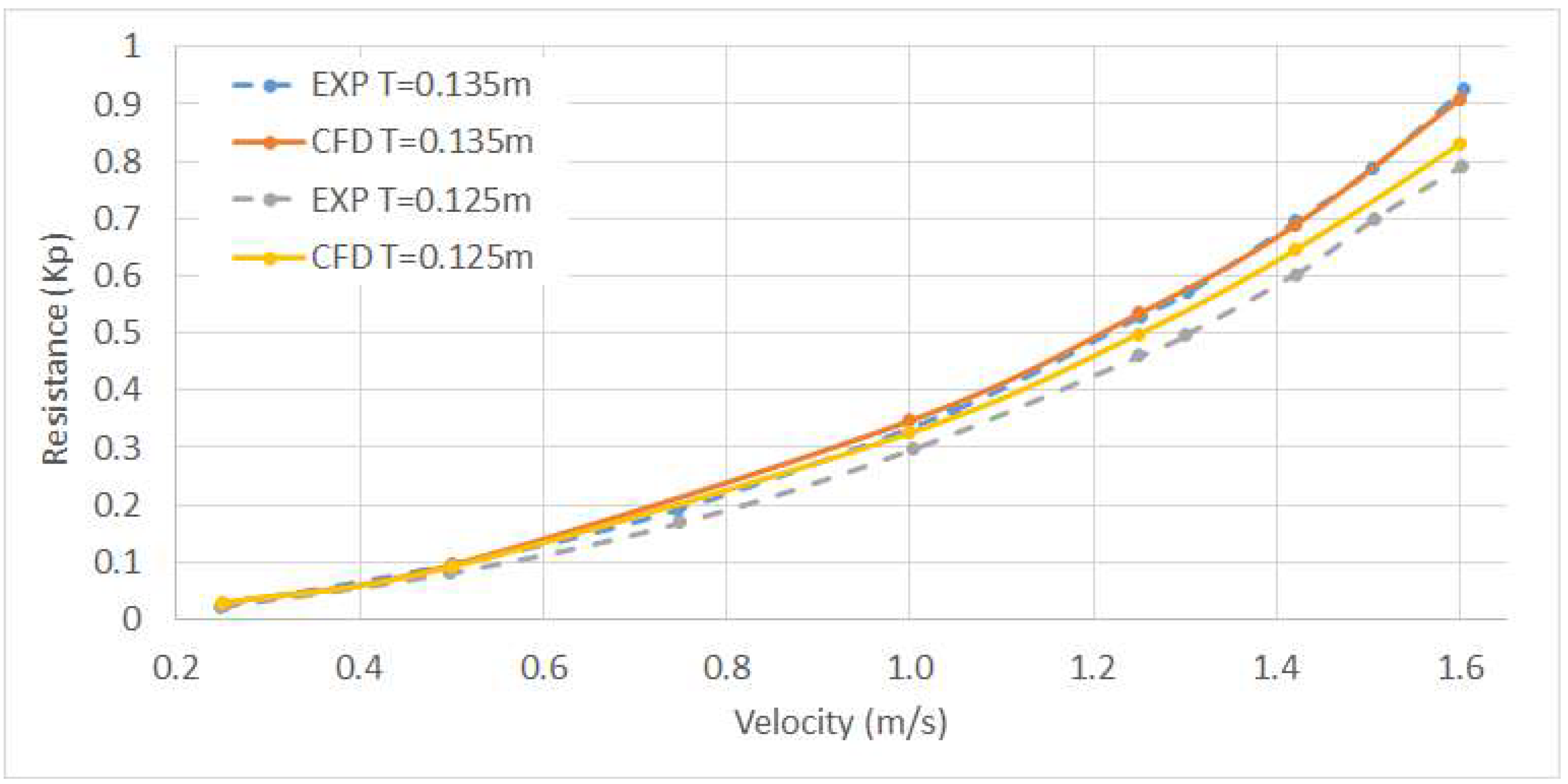
Figure 5.
Comparison of the CFD data and experimental predicted resistance for the two drafts.
Figure 5.
Comparison of the CFD data and experimental predicted resistance for the two drafts.
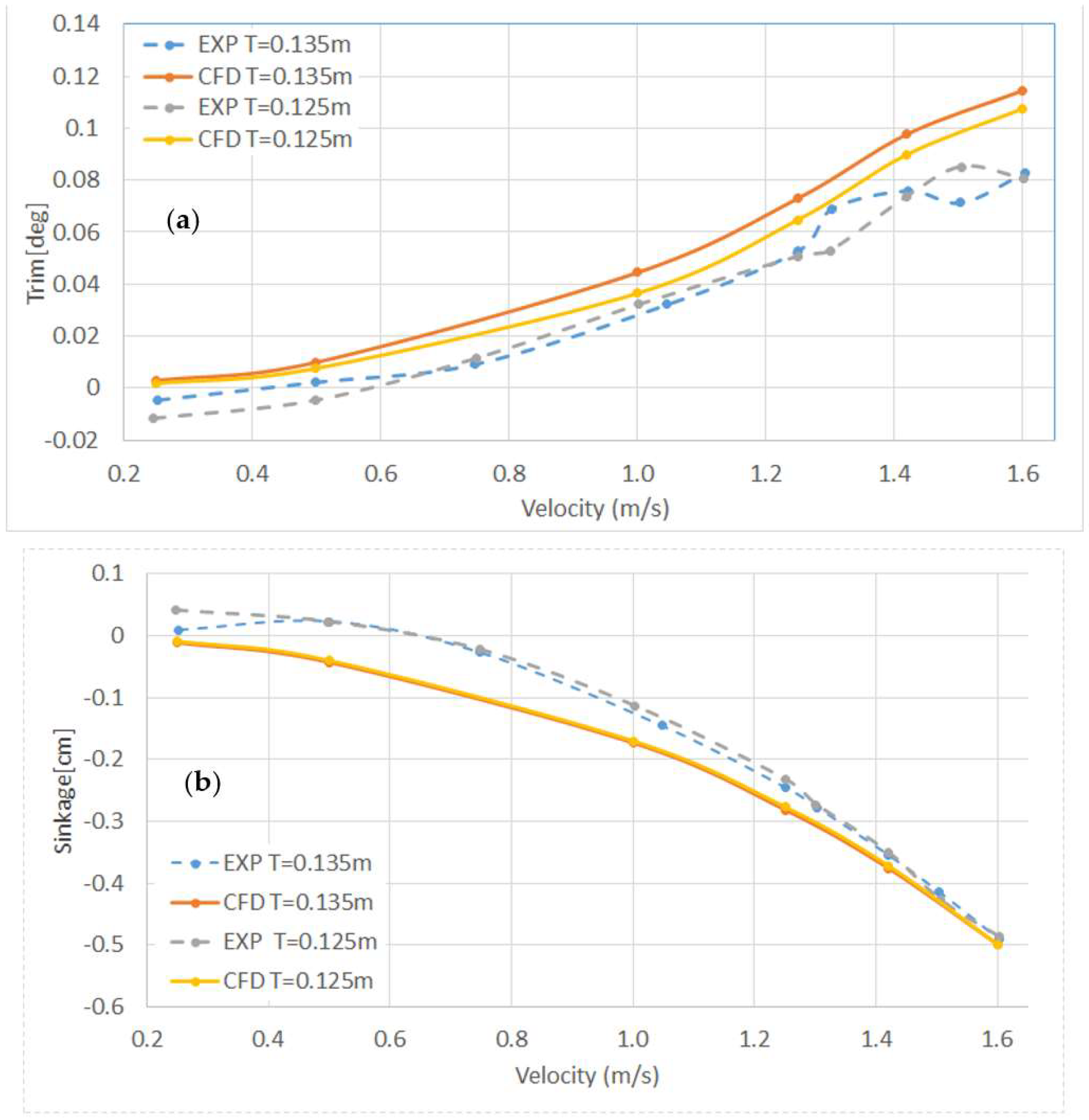
Figure 6.
Comparison of the CFD data and experimental predictions for the two drafts for (a) trim angle and (b) sinkage.
Figure 6.
Comparison of the CFD data and experimental predictions for the two drafts for (a) trim angle and (b) sinkage.
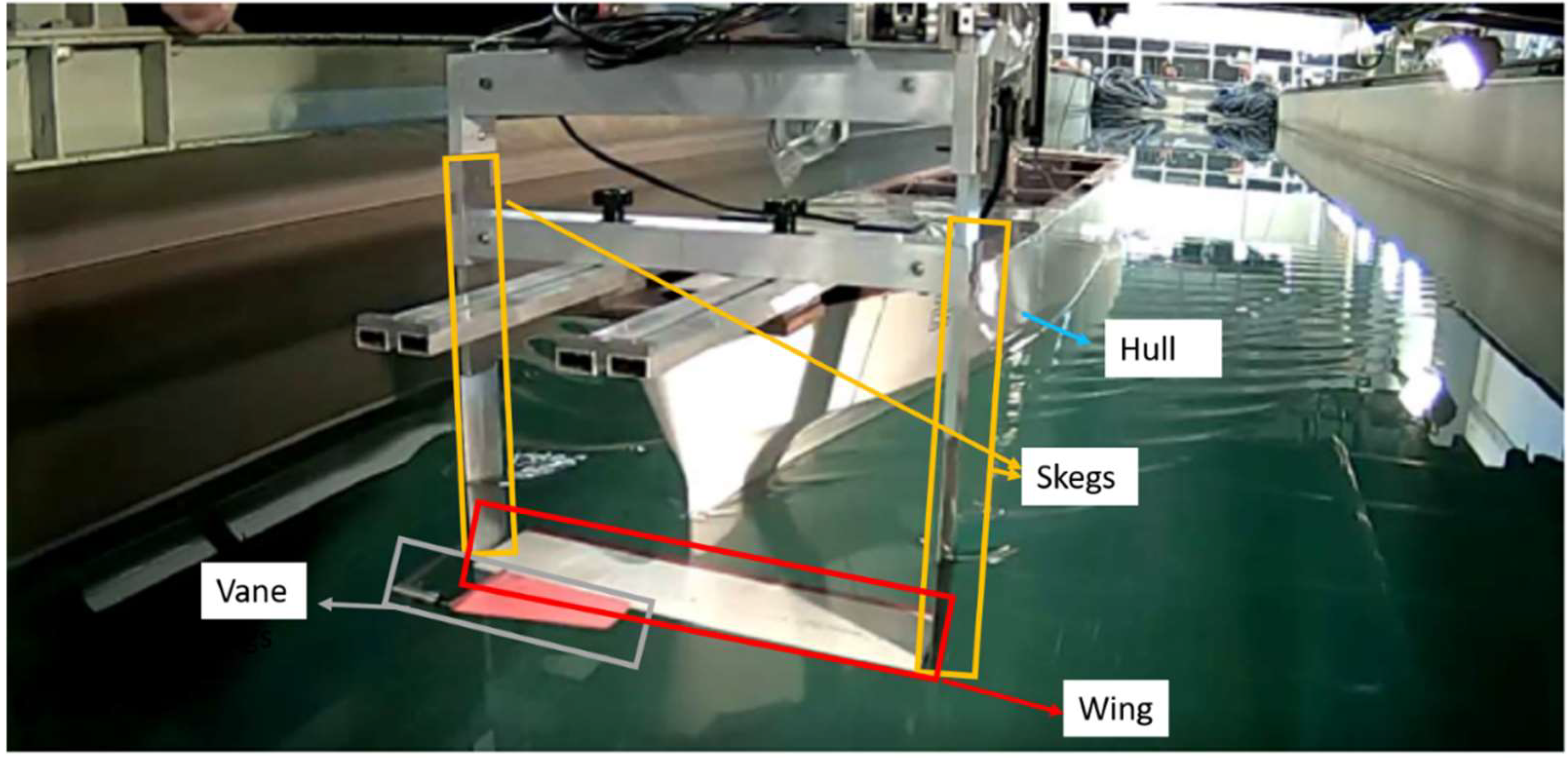
Figure 7.
Experimental configuration of the dynamic wing arranged at the bow of the ferry ship model tested in the tank of LMSH at NTUA.
Figure 7.
Experimental configuration of the dynamic wing arranged at the bow of the ferry ship model tested in the tank of LMSH at NTUA.
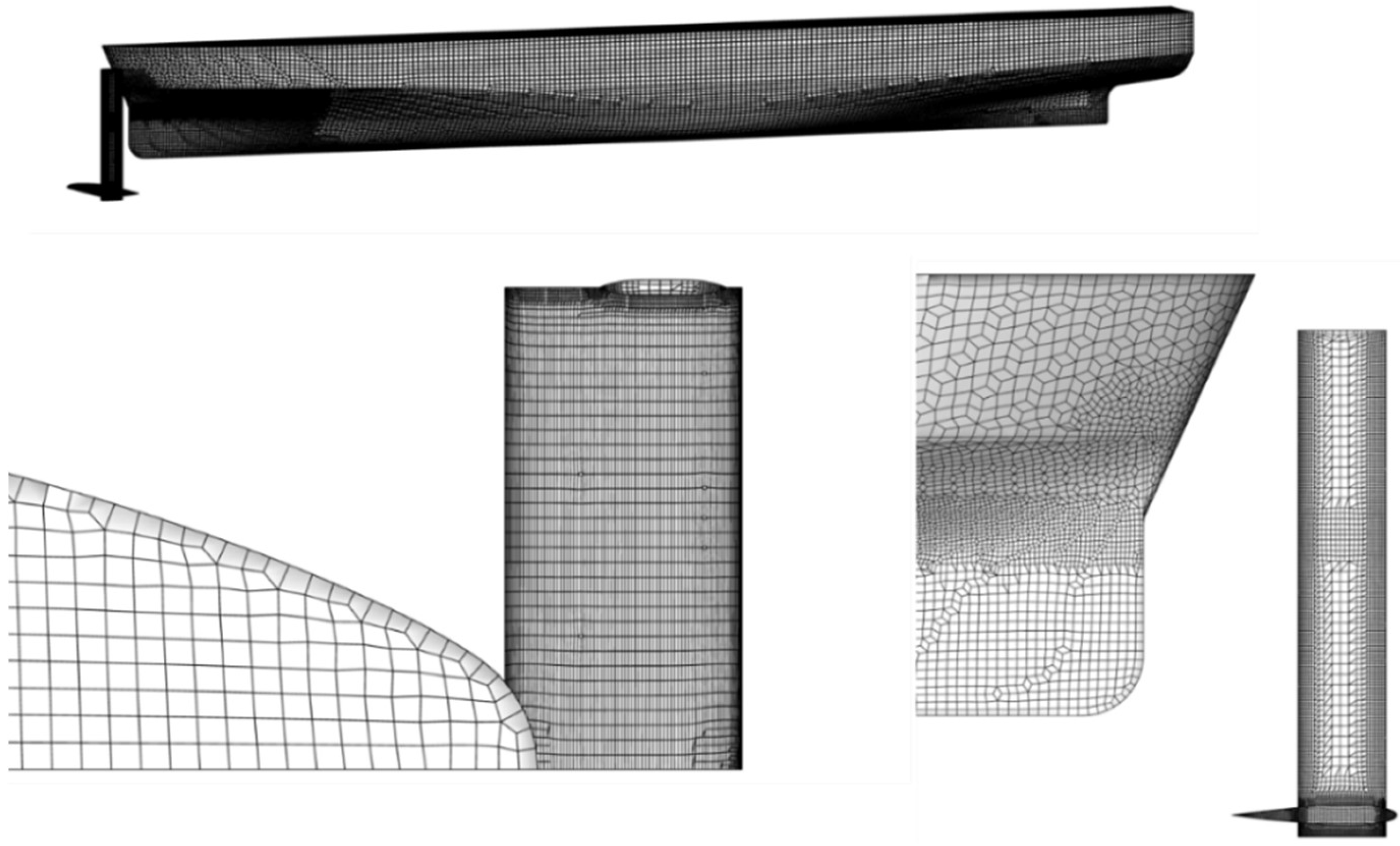
Figure 8.
Computation mesh of the hull with the skegs–wing configuration.
Figure 8.
Computation mesh of the hull with the skegs–wing configuration.
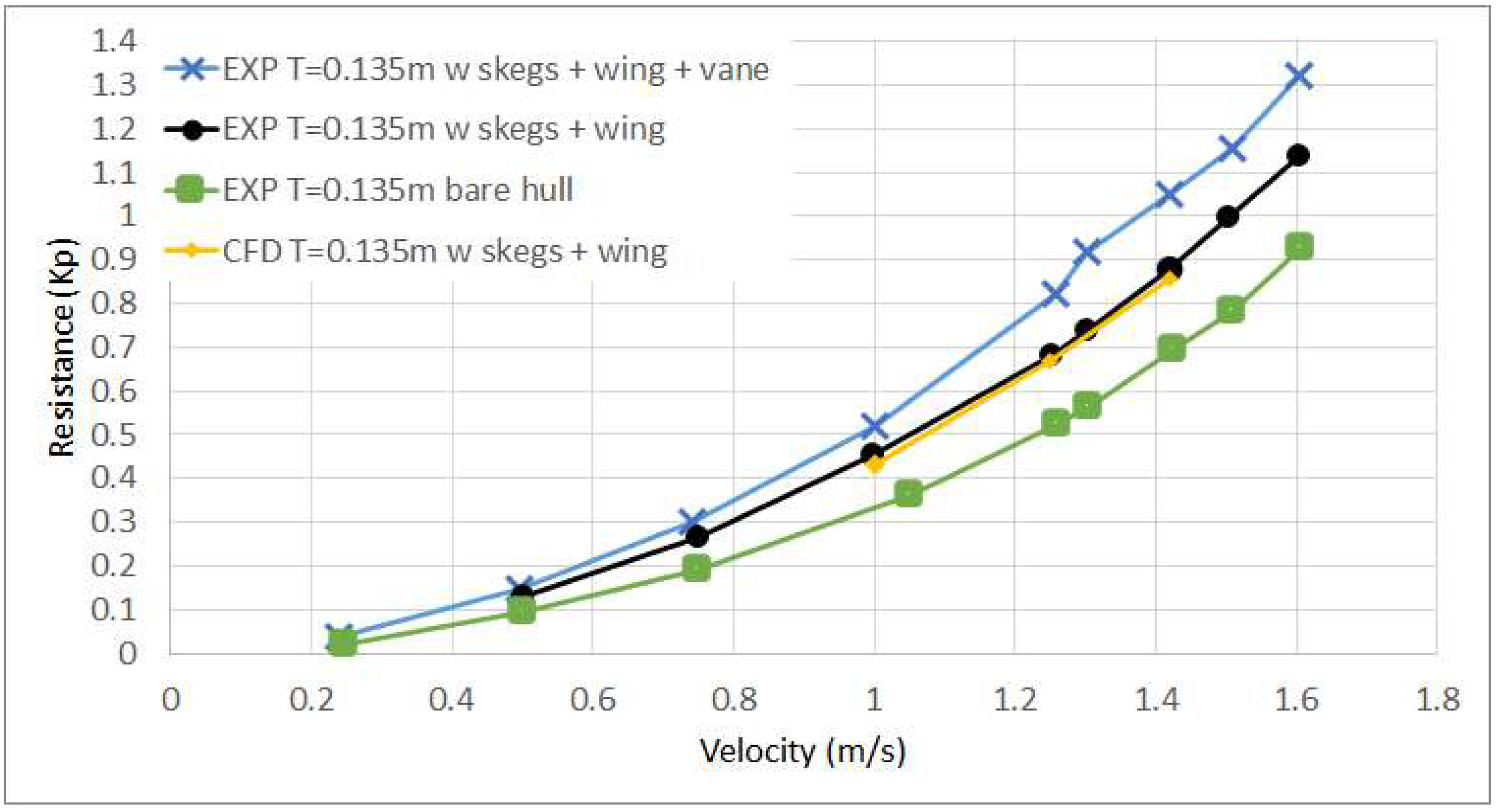
Figure 9.
Comparison of the various configurations for heave draft T = 0.135 m.
Figure 9.
Comparison of the various configurations for heave draft T = 0.135 m.
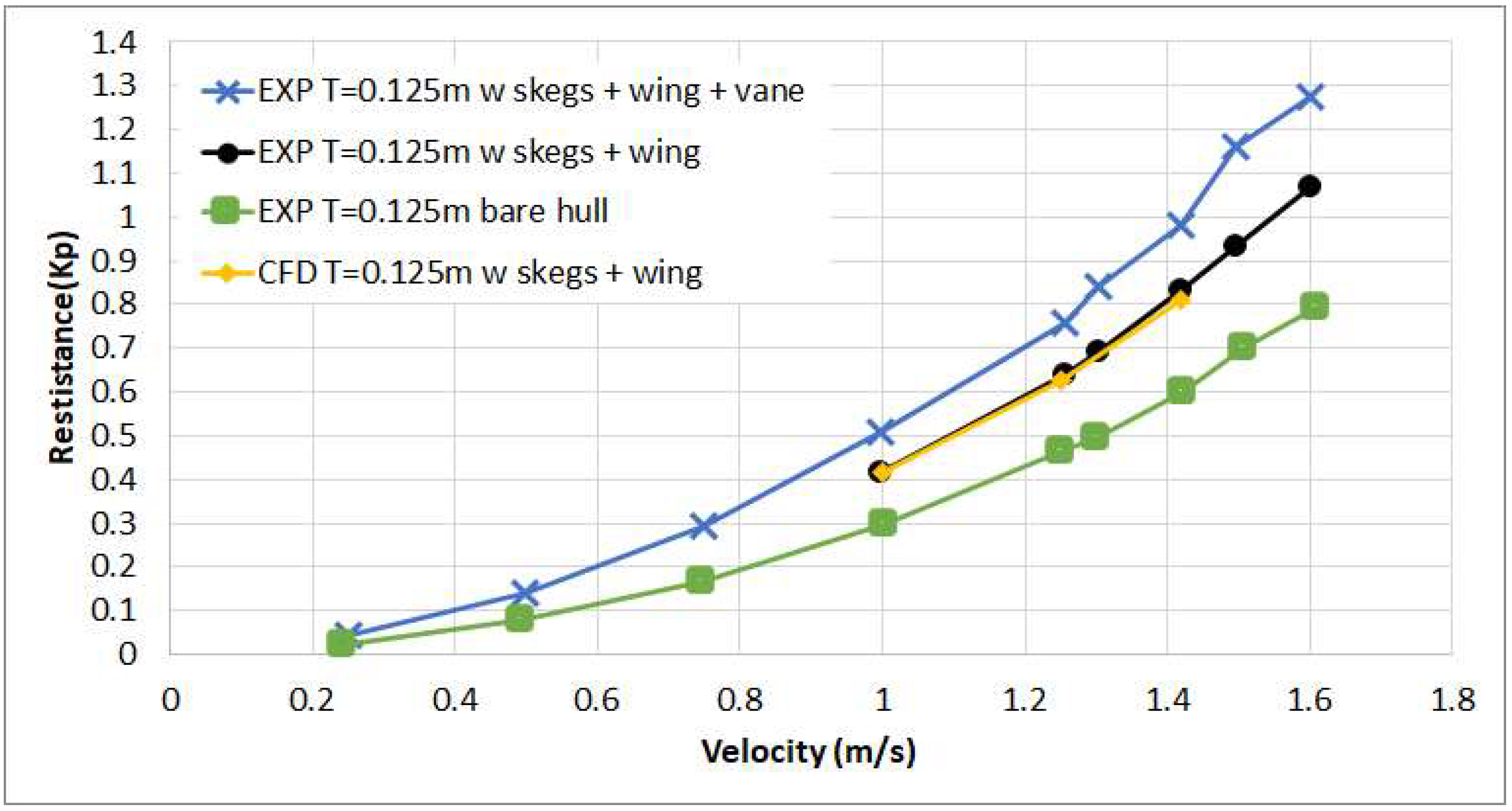
Figure 10.
Comparison of the various configurations for heave draft T = 0.125 m.
Figure 10.
Comparison of the various configurations for heave draft T = 0.125 m.
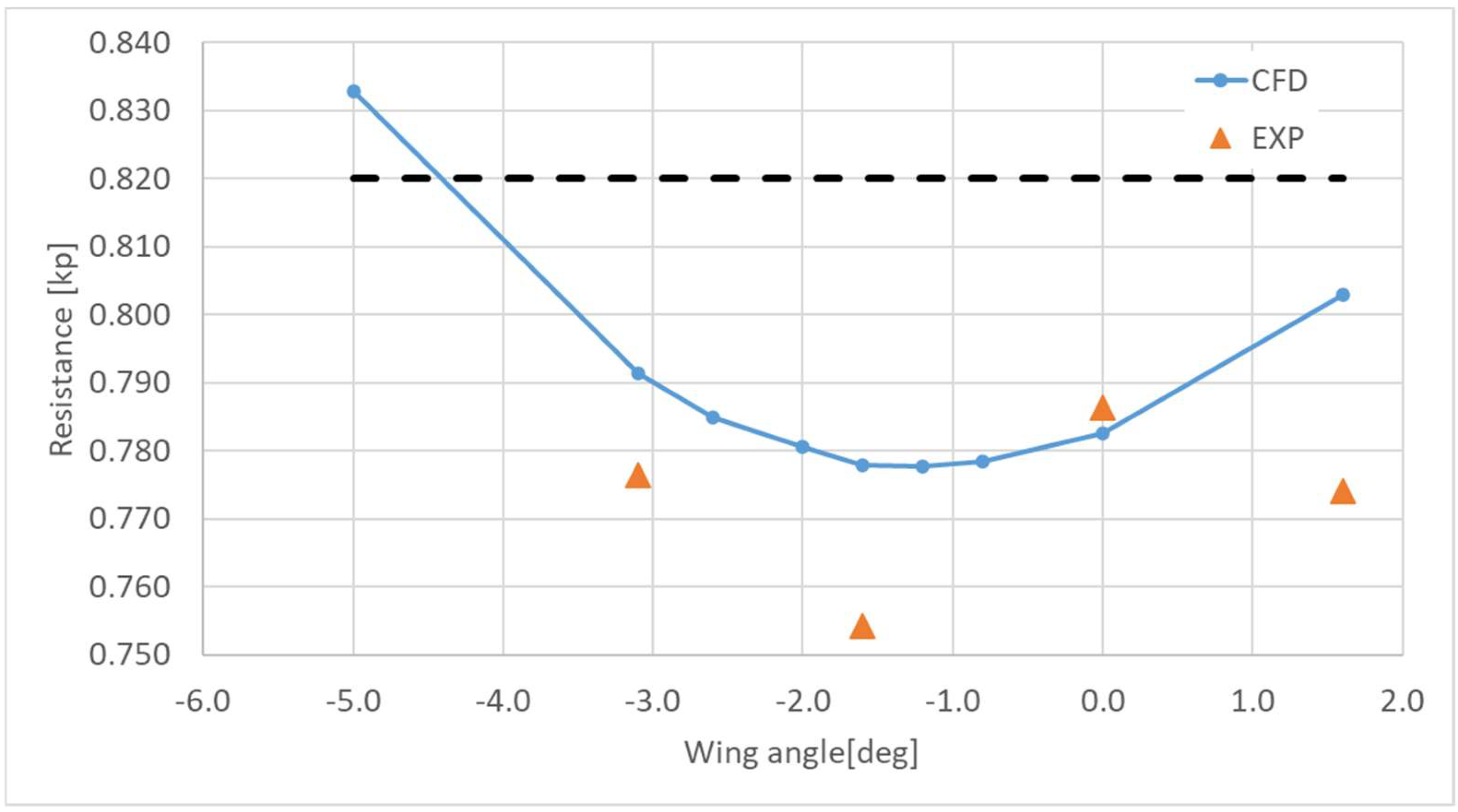
Figure 11.
Comparison of the predicted resistance for the various angles of attack. The results concern the nominal speed (V = 1.42 m/s) for the heavier condition (T = 0.135 m). The experimental data were corrected by subtracting the resistance of the skegs and vane.
Figure 11.
Comparison of the predicted resistance for the various angles of attack. The results concern the nominal speed (V = 1.42 m/s) for the heavier condition (T = 0.135 m). The experimental data were corrected by subtracting the resistance of the skegs and vane.
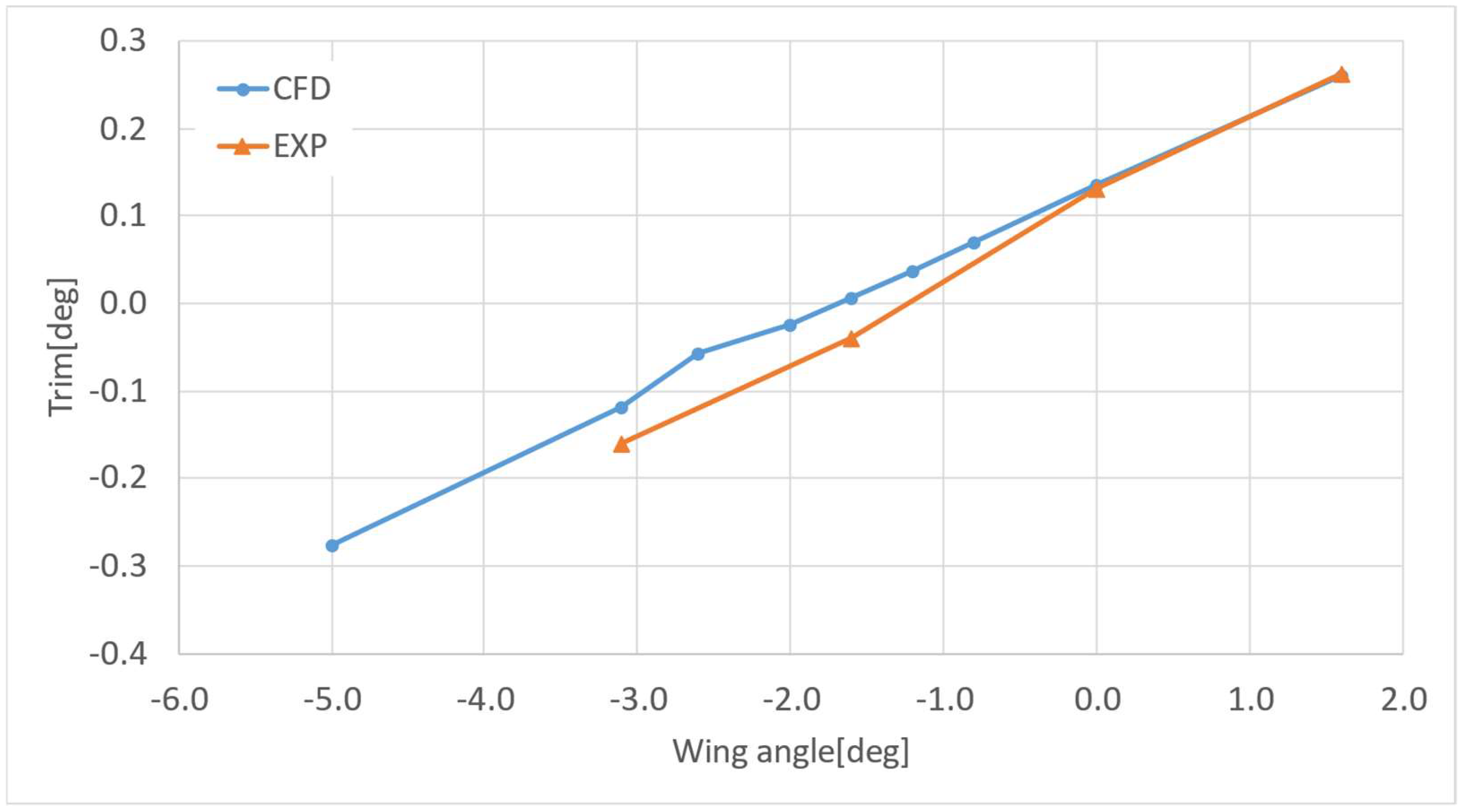
Figure 12.
Comparison of the predicted trim angle for the various angles of attack. The results concern the nominal speed (Vnom = 1.42 m/s) for the heavier condition (T = 0.135 m).
Figure 12.
Comparison of the predicted trim angle for the various angles of attack. The results concern the nominal speed (Vnom = 1.42 m/s) for the heavier condition (T = 0.135 m).
Figure 13.
Comparison of the predicted sinkage for the various angles of attack. The results concern the nominal speed (Vnom = 1.42 m/s) for the heavier condition (T = 0.125 m).
Figure 13.
Comparison of the predicted sinkage for the various angles of attack. The results concern the nominal speed (Vnom = 1.42 m/s) for the heavier condition (T = 0.125 m).
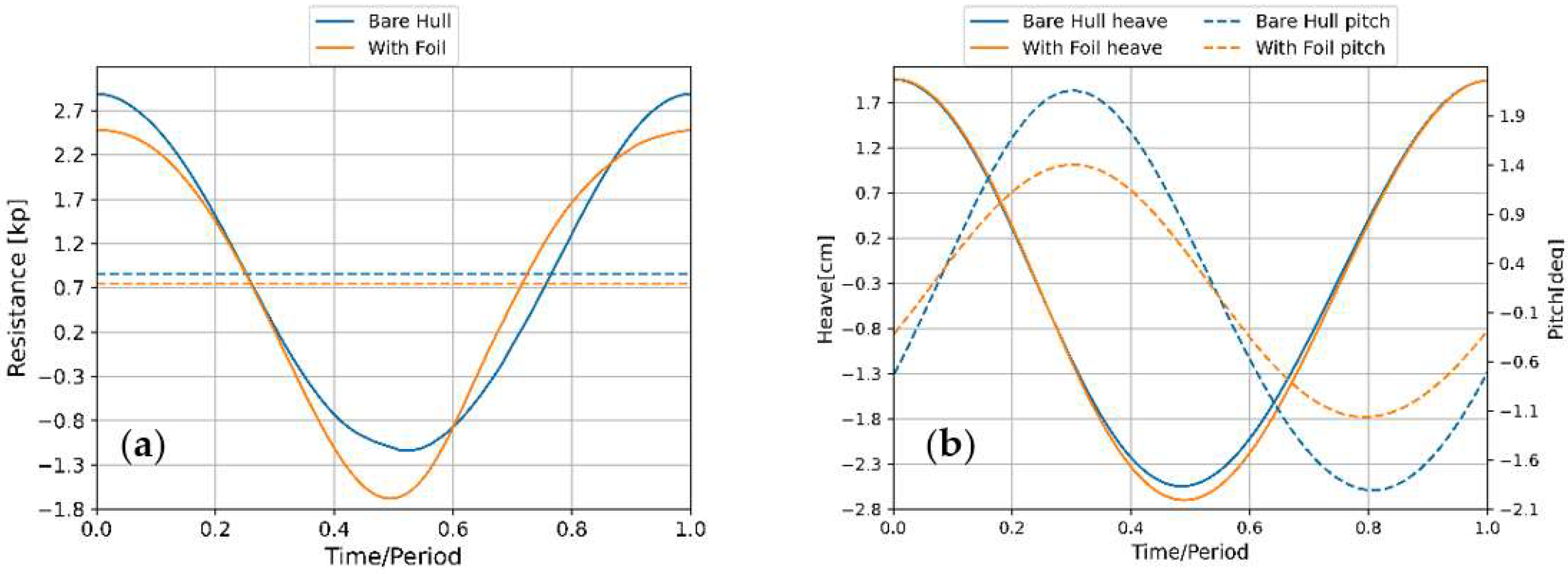
Figure 14.
Numerical results of (a) model resistance and (b) pitch and heave motions with and without the foil over one encounter period. In the left figure, the dotted line corresponds to the mean value of the model’s resistance. Wave frequency: f = 0.55 Hz. Wavelength to ship length: Lw/Ls = 1.62.
Figure 14.
Numerical results of (a) model resistance and (b) pitch and heave motions with and without the foil over one encounter period. In the left figure, the dotted line corresponds to the mean value of the model’s resistance. Wave frequency: f = 0.55 Hz. Wavelength to ship length: Lw/Ls = 1.62.
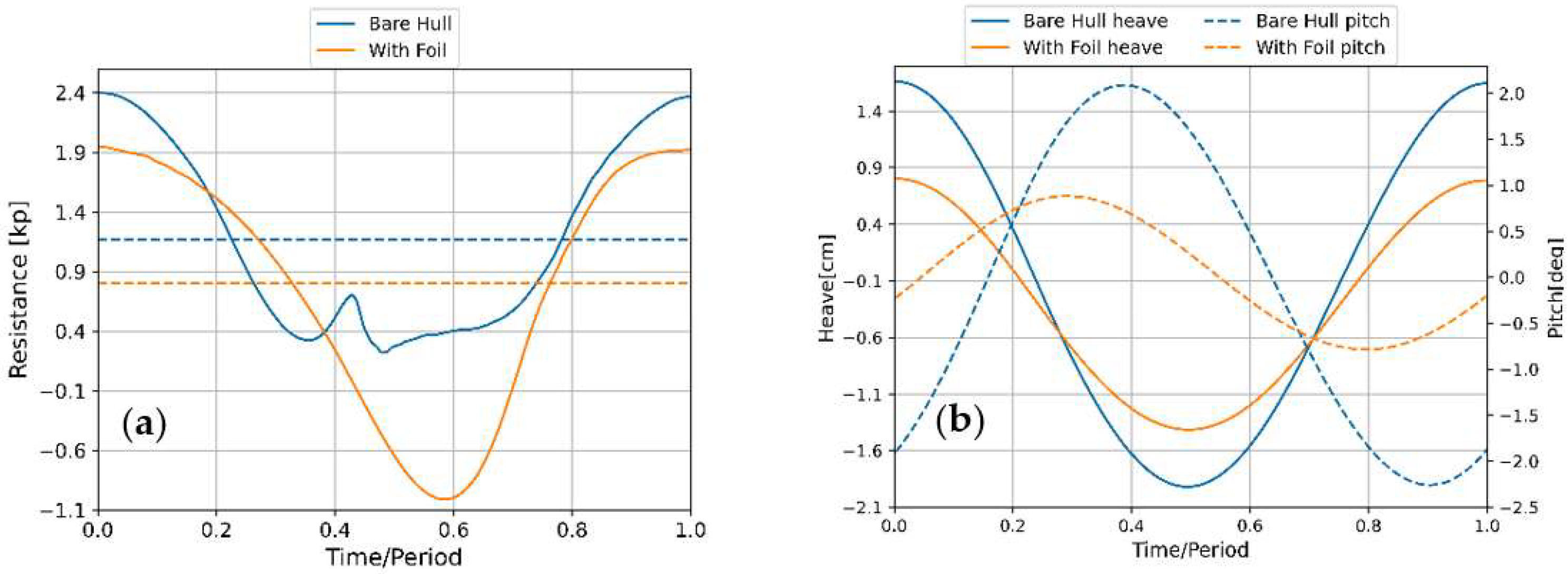
Figure 15.
Numerical results of (a) model resistance and (b) pitch and heave motions with and without the foil over one encounter period. In the left figure, the dotted line corresponds to the mean value of the model’s resistance. Wave frequency: f = 0.67 Hz. Wavelength to ship length: Lw/Ls = 1.09.
Figure 15.
Numerical results of (a) model resistance and (b) pitch and heave motions with and without the foil over one encounter period. In the left figure, the dotted line corresponds to the mean value of the model’s resistance. Wave frequency: f = 0.67 Hz. Wavelength to ship length: Lw/Ls = 1.09.
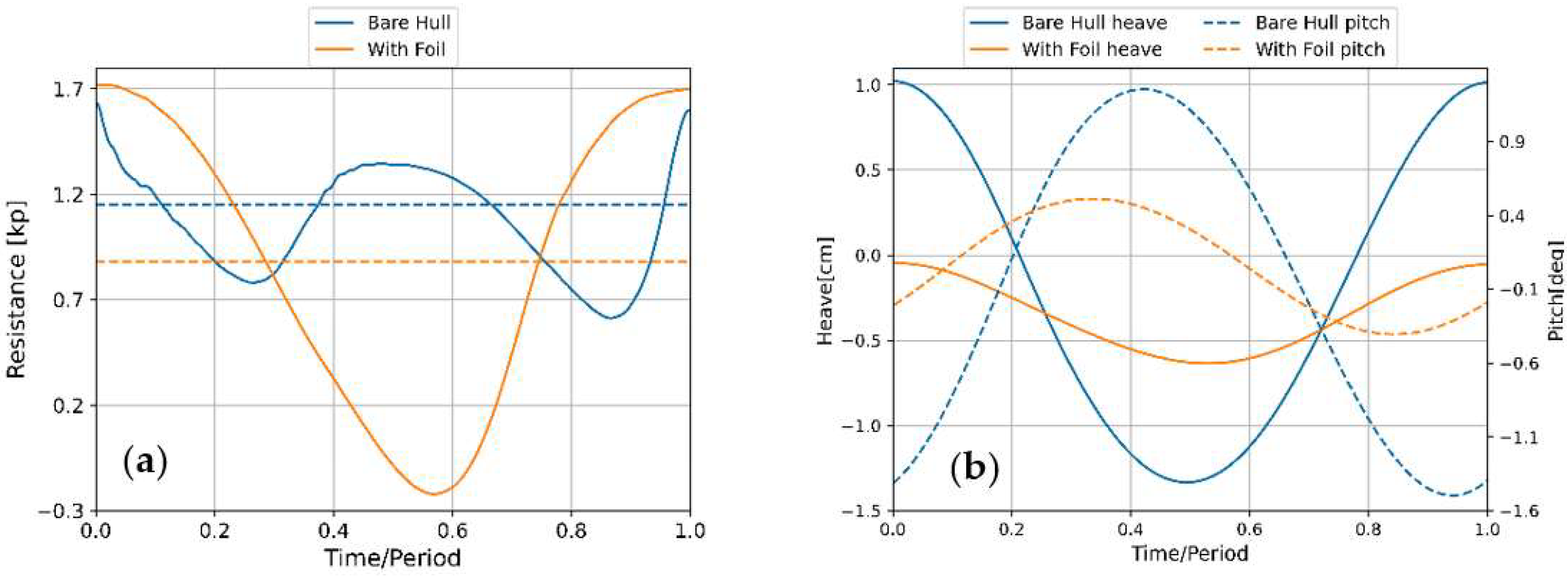
Figure 16.
Numerical results of (a) model resistance and (b) pitch and heave motions with and without the foil over one encounter period. In the left figure, the dotted line corresponds to the mean value of the model’s resistance. Wave frequency: f = 0.75 Hz. Wavelength to ship length: Lw/Ls = 0.87.
Figure 16.
Numerical results of (a) model resistance and (b) pitch and heave motions with and without the foil over one encounter period. In the left figure, the dotted line corresponds to the mean value of the model’s resistance. Wave frequency: f = 0.75 Hz. Wavelength to ship length: Lw/Ls = 0.87.
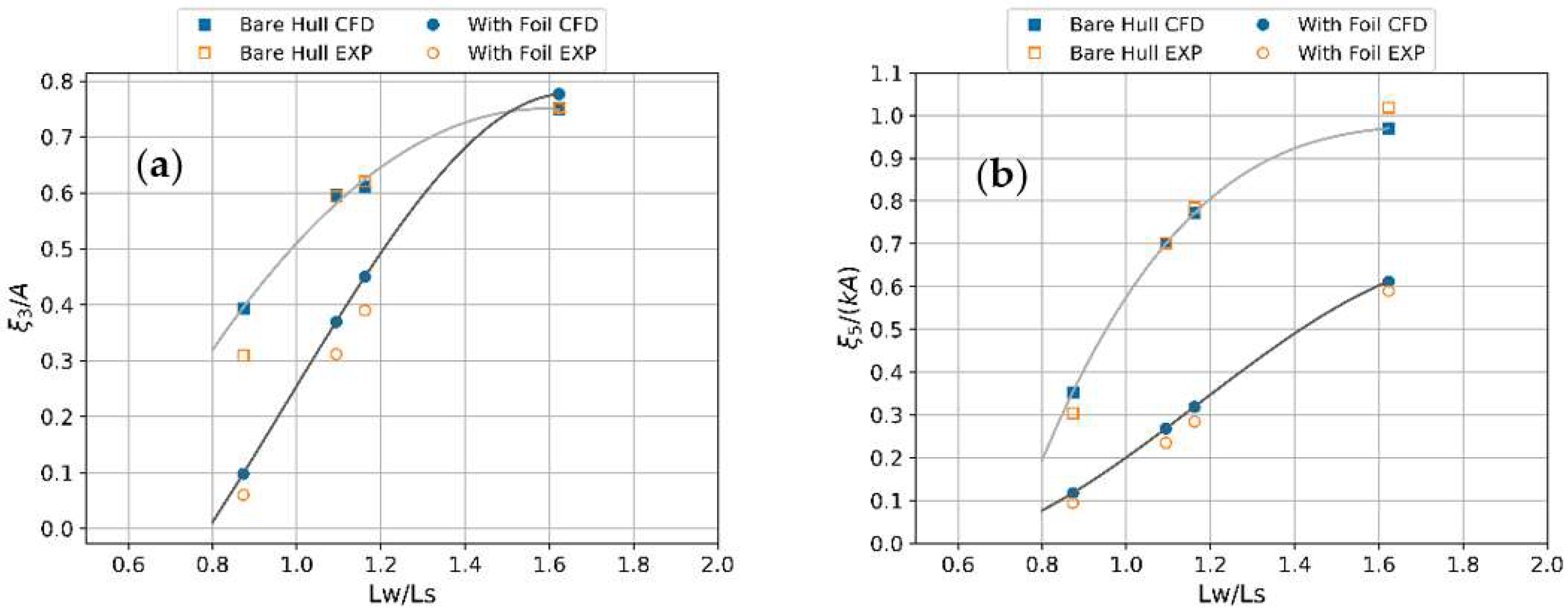
Figure 17.
Comparison between numerical and experimental results for regular waves with and without foil. The figures present the response amplitude operators for (a) nondimensional heave and (b) normalized pitch, where A is the wave amplitude, and k is the wave number.
Figure 17.
Comparison between numerical and experimental results for regular waves with and without foil. The figures present the response amplitude operators for (a) nondimensional heave and (b) normalized pitch, where A is the wave amplitude, and k is the wave number.
Figure 18.
Iso-surface of the density field for ρm = 500 kg/m3 colored by the vertical coordinate. The two figures correspond to the heavier draft (T = 0.135 m) for an incident wave frequency of 0.67 Hz; (a) presents the bare hull case and (b) depicts the hull equipped with the static foil.
Figure 18.
Iso-surface of the density field for ρm = 500 kg/m3 colored by the vertical coordinate. The two figures correspond to the heavier draft (T = 0.135 m) for an incident wave frequency of 0.67 Hz; (a) presents the bare hull case and (b) depicts the hull equipped with the static foil.
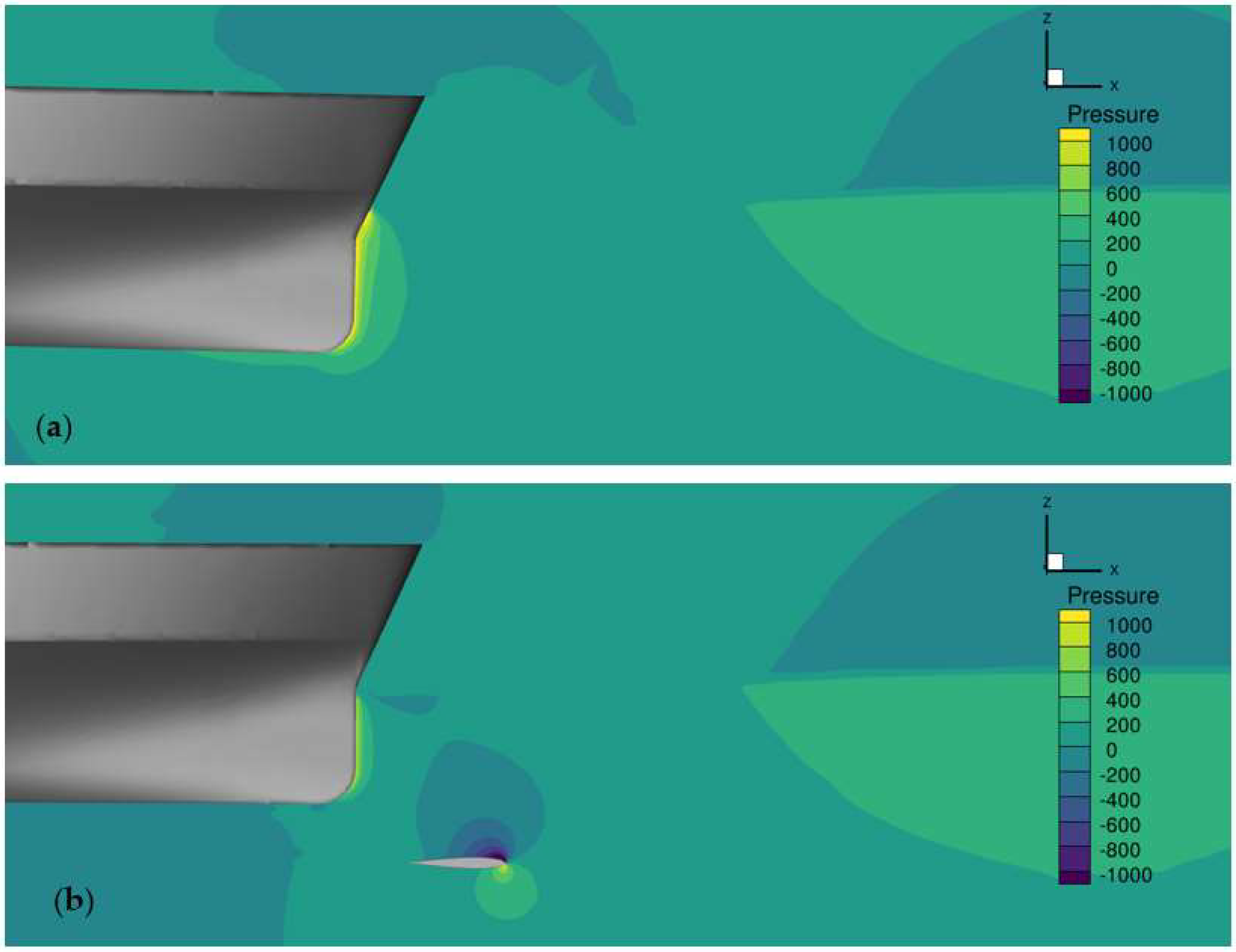
Figure 19.
Pressure field at the symmetry plane (y = 0 m) for the two configurations: (a) presents the base hull case, while figure (b) depicts the hull equipped with the static foil. The two figures correspond to the heavier draft (T = 0.135 m) for an incident wave frequency of 0.67 Hz.
Figure 19.
Pressure field at the symmetry plane (y = 0 m) for the two configurations: (a) presents the base hull case, while figure (b) depicts the hull equipped with the static foil. The two figures correspond to the heavier draft (T = 0.135 m) for an incident wave frequency of 0.67 Hz.
Table 1.
Grid and time-step independency study.
Table 1.
Grid and time-step independency study.
| Grid-Time-Step | Resistance (kp) | Trim (deg) | Sinkage (cm) |
|---|
| G3-Tref/2500 | 0.704 | 0.0977 | −0.386 |
| G2-Tref/2500 | 0.687 | 0.0954 | −0.388 |
| G1-Tref/2500 | 0.682 | 0.0922 | −0.392 |
| G2-Tref/500 | 0.686 | 0.0959 | −0.387 |
| G2-Tref/250 | 0.686 | 0.0958 | −0.387 |
Table 2.
Estimation of the spatial discretization error for the resistance calculations.
Table 2.
Estimation of the spatial discretization error for the resistance calculations.
| h1 | h2 | h3 | r21 | r32 | p | | | | |
|---|
| 0.0455 | 0.0616 | 0.0860 | 1.35 | 1.40 | 1.53 | 0.674 | 0.73% | 1.26% | 1.56% |
Table 3.
Contribution of the individual components of the full configuration on the model’s resistance. Three different Froude numbers were examined for the T = 0.135 m draft.
Table 3.
Contribution of the individual components of the full configuration on the model’s resistance. Three different Froude numbers were examined for the T = 0.135 m draft.
| Froude No. | Total [kp] | Hull [kp] | Skegs [kp] | Wing [kp] |
|---|
| 0.25 | 0.829 | 0.66 | 0.077 | 0.092 |
| 0.22 | 0.653 | 0.52 | 0.061 | 0.072 |
| 0.176 | 0.431 | 0.34 | 0.043 | 0.048 |
Table 4.
Contribution of the individual components of the full configuration on the mode’s resistance. Three different Froude numbers were examined for the T = 0.125 m draft.
Table 4.
Contribution of the individual components of the full configuration on the mode’s resistance. Three different Froude numbers were examined for the T = 0.125 m draft.
| Froude No. | Total [kp] | Hull [kp] | Skegs [kp] | Wing [kp] |
|---|
| 0.25 | 0.788 | 0.62 | 0.073 | 0.095 |
| 0.22 | 0.614 | 0.48 | 0.059 | 0.075 |
| 0.176 | 0.413 | 0.32 | 0.042 | 0.051 |
Table 5.
Experimental results for the static wing in various AoAs. All results regard the nominal speed of the vessel (Fn = 0.25 or Vnom = 1.42 m/s) in the case of the heavier condition (T = 0.135 m).
Table 5.
Experimental results for the static wing in various AoAs. All results regard the nominal speed of the vessel (Fn = 0.25 or Vnom = 1.42 m/s) in the case of the heavier condition (T = 0.135 m).
| Angle of Attack [deg] | Resistance [kp] | Trim [deg] | Sinkage [cm] |
|---|
| −3.1 | 1.031 | −0.159 | −0.198 |
| −1.6 | 1.007 | −0.039 | −0.291 |
| 1.6 | 1.028 | 0.264 | −0.494 |
| 0 | 1.042 | 0.132 | −0.401 |
Table 6.
Time-step independency study for the case study with regular waves. The table presents the mean value and amplitudes (A) of the heave (), pitch (), and resistance ().
Table 6.
Time-step independency study for the case study with regular waves. The table presents the mean value and amplitudes (A) of the heave (), pitch (), and resistance ().
| dt [s] | | | | | | |
|---|
| 0.003 | 1.93 | 2.27 | 1.18 | 1.93 | 2.27 | 1.18 |
| 0.002 | 1.79 | 2.19 | 1.10 | 1.79 | 2.19 | 1.10 |
| 0.001 | 1.75 | 2.14 | 1.08 | 1.75 | 2.14 | 1.08 |
Table 7.
Mean resistance per encounter cycle for the bare hull and foil configurations at considered wave excitations.
Table 7.
Mean resistance per encounter cycle for the bare hull and foil configurations at considered wave excitations.
| Wavelength to Ship Length Lw/Ls | Resistance [kp]
Bare Hull | Resistance [kp]
with Foil | Gain (%) |
|---|
| 0.87 | 1.153 | 0.883 | +23.5 |
| 1.09 | 1.165 | 0.801 | +31.2 |
| 1.16 | 1.177 | 0.774 | +34.2 |
| 1.62 | 0.854 | 0.747 | +12.5 |























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}