
Asymmetrical Oscillating Morphology Hydrodynamic Performance of a Novel Bionic Pectoral Fin


Abstract
:1. Introduction
2. Bionic Pectoral Fin Design and Analysis
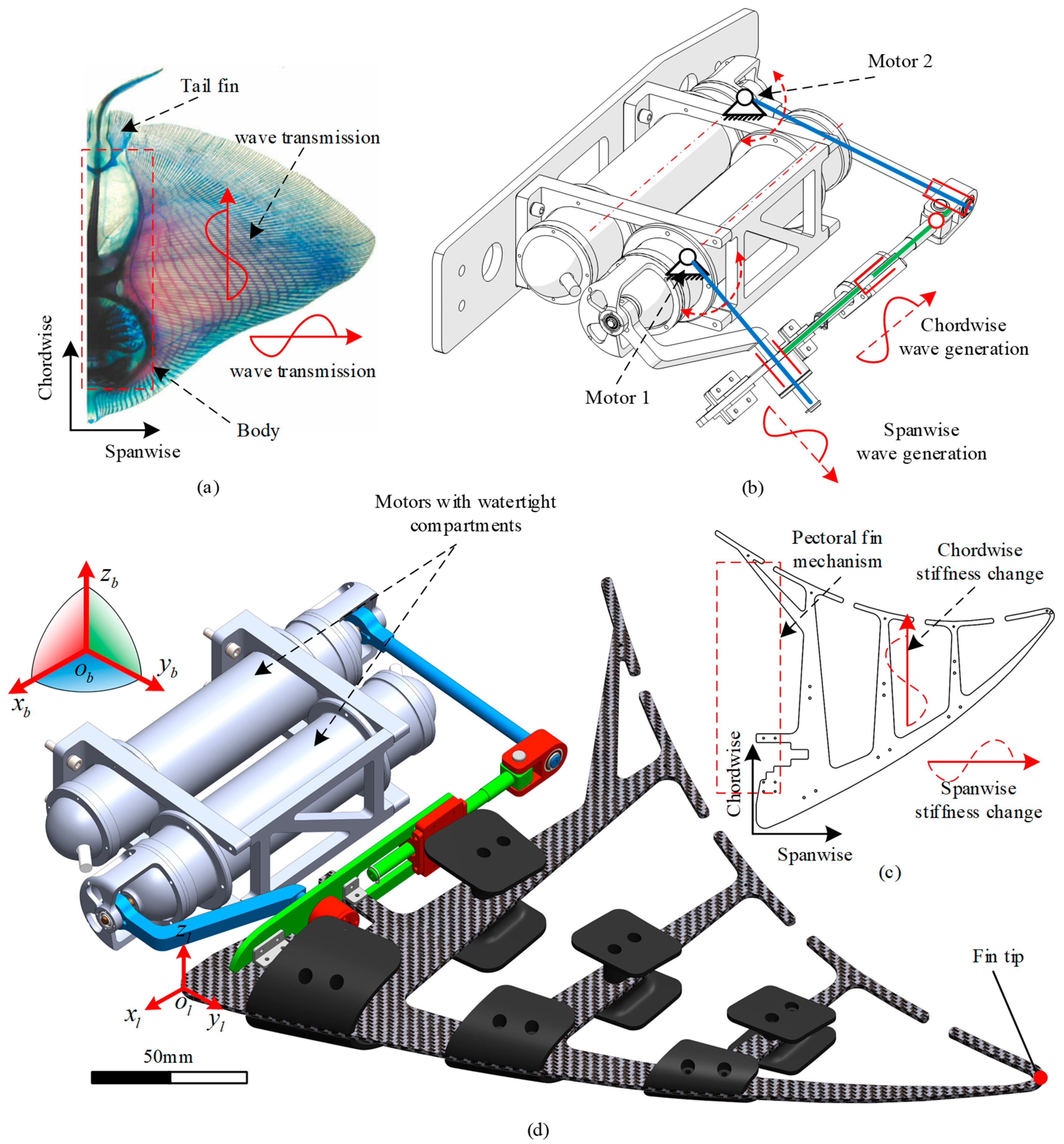
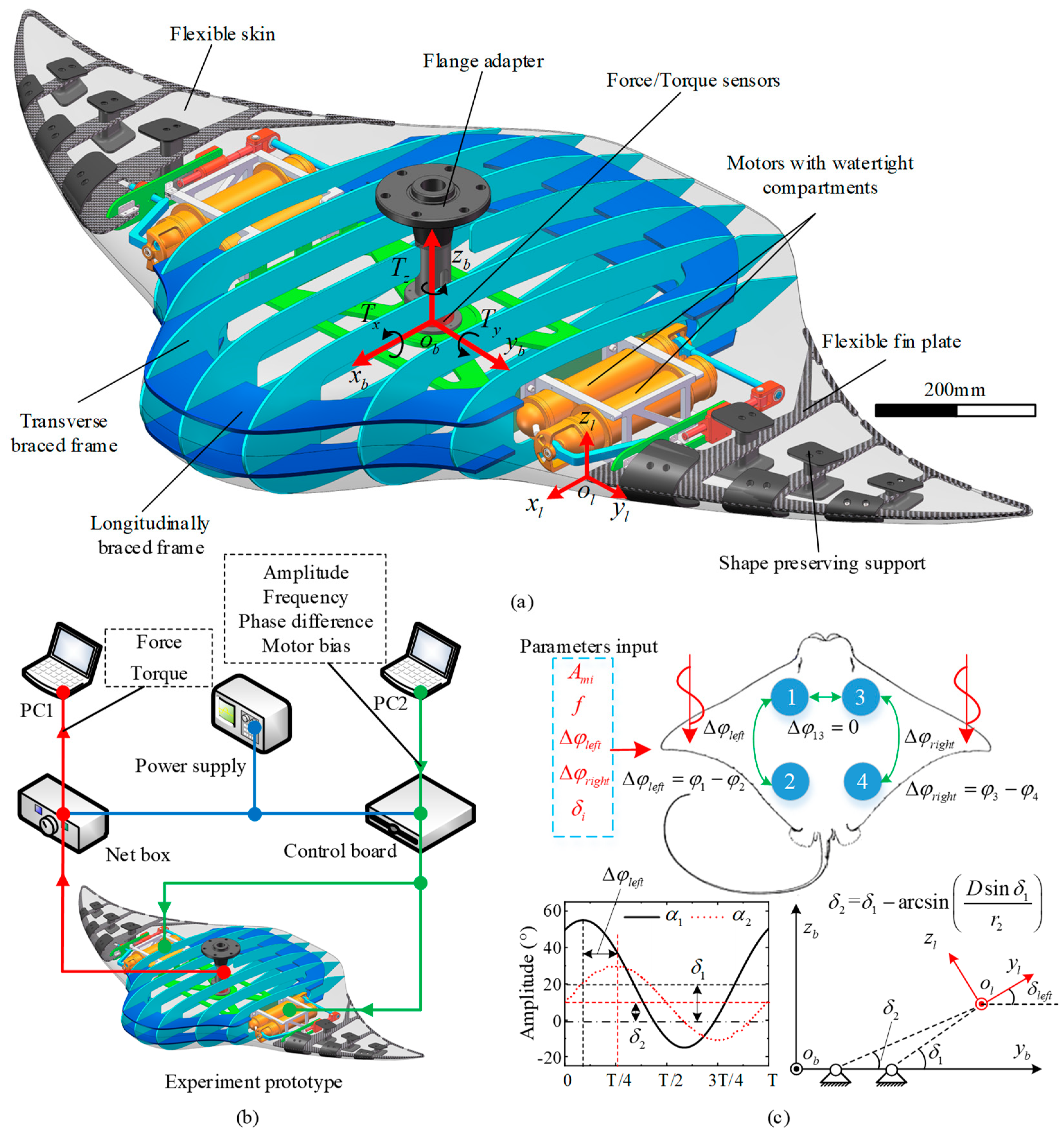
2.1. Mechanical Design of Bionic Pectoral Fin
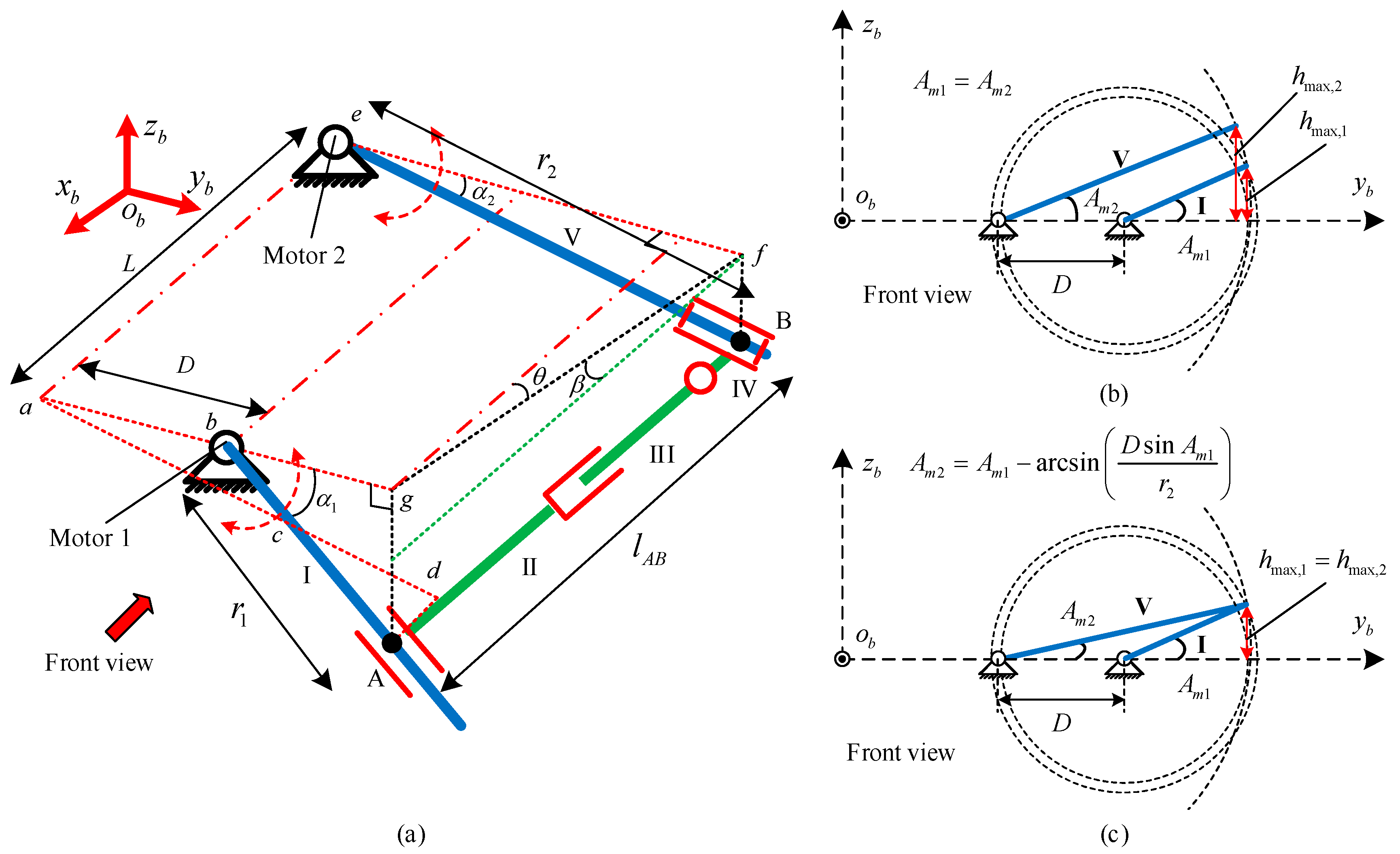
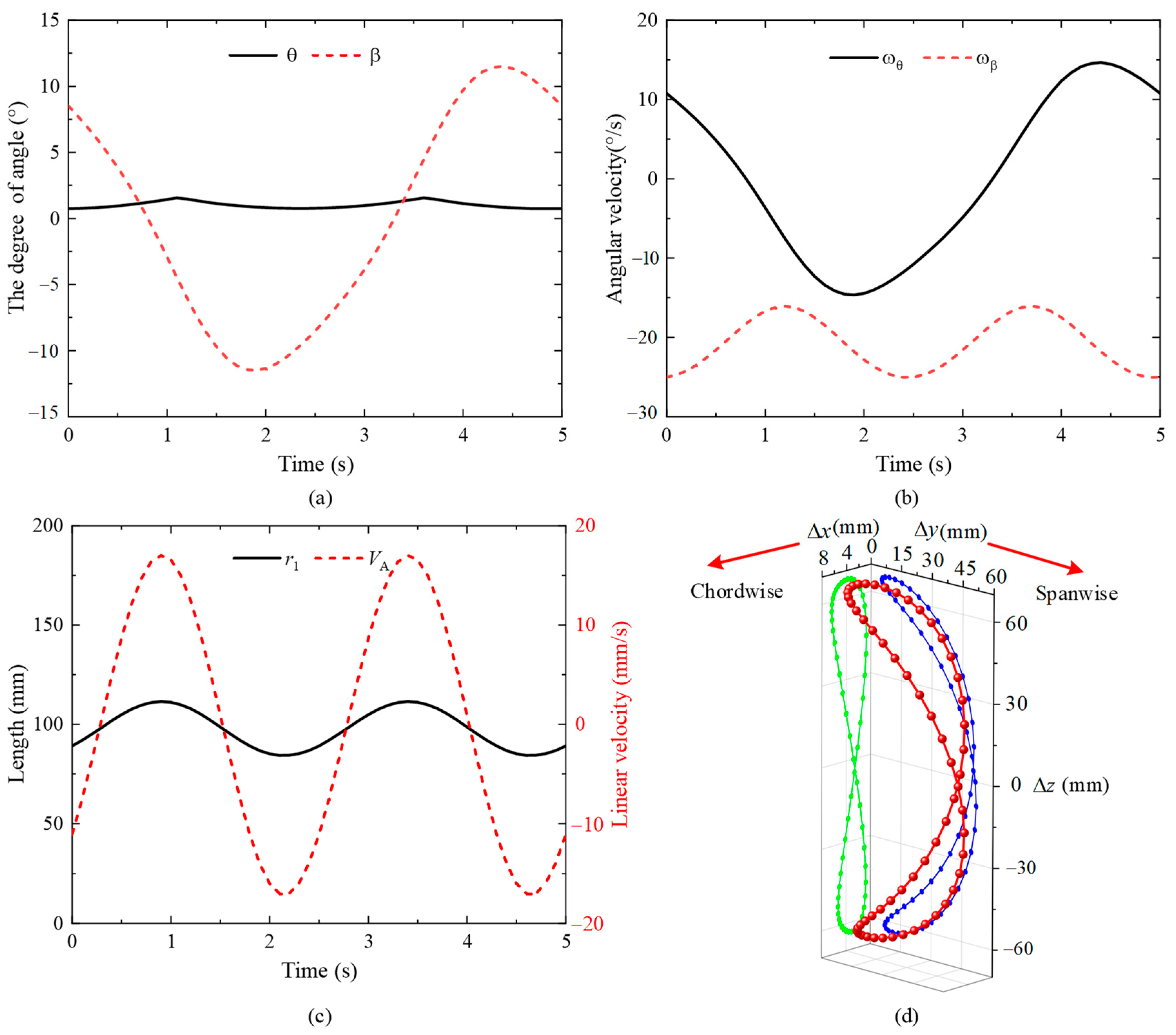
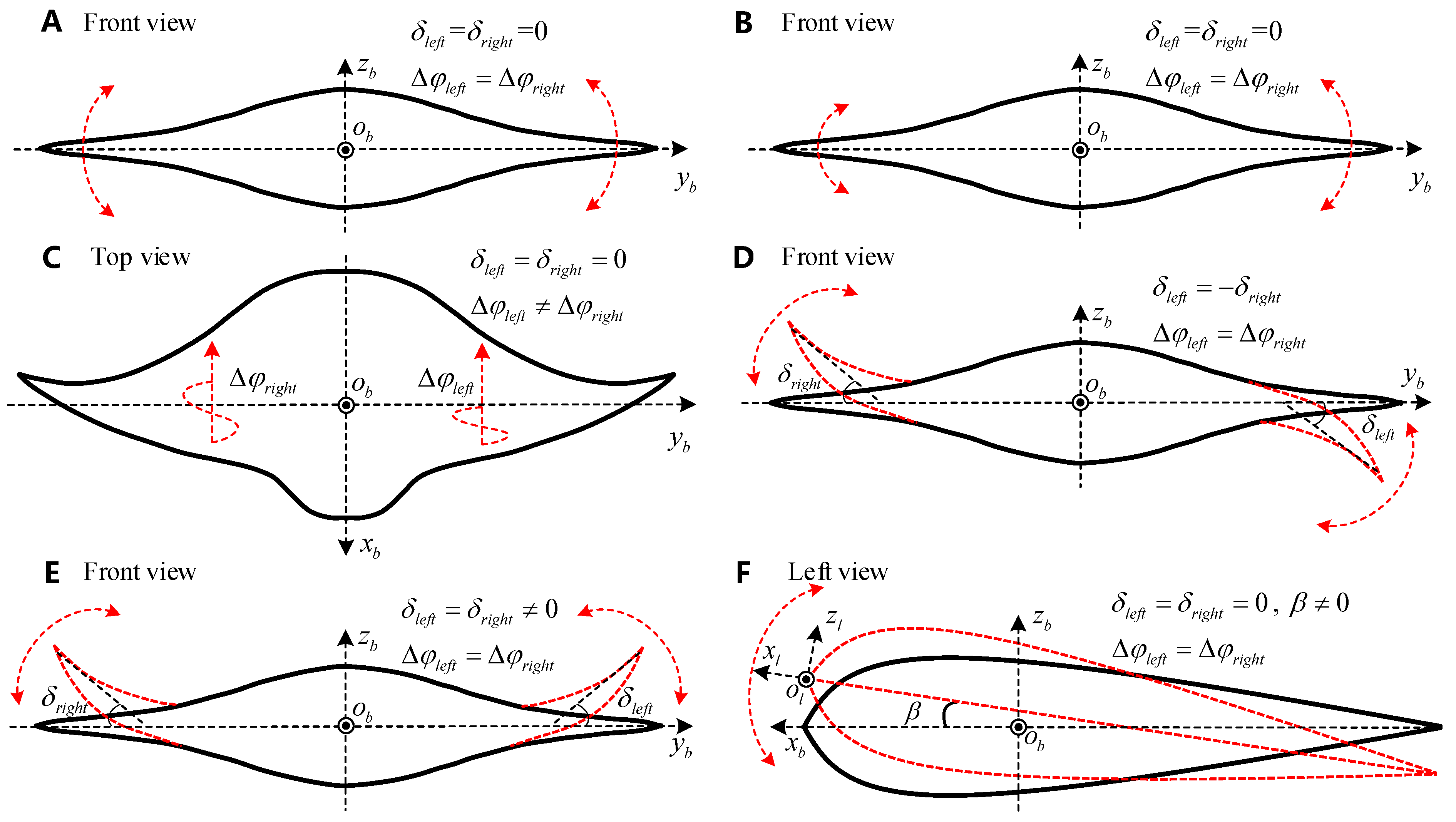
2.2. Bionic Pectoral Fin Motion Analysis Results
3. Experimental Results and Discussion
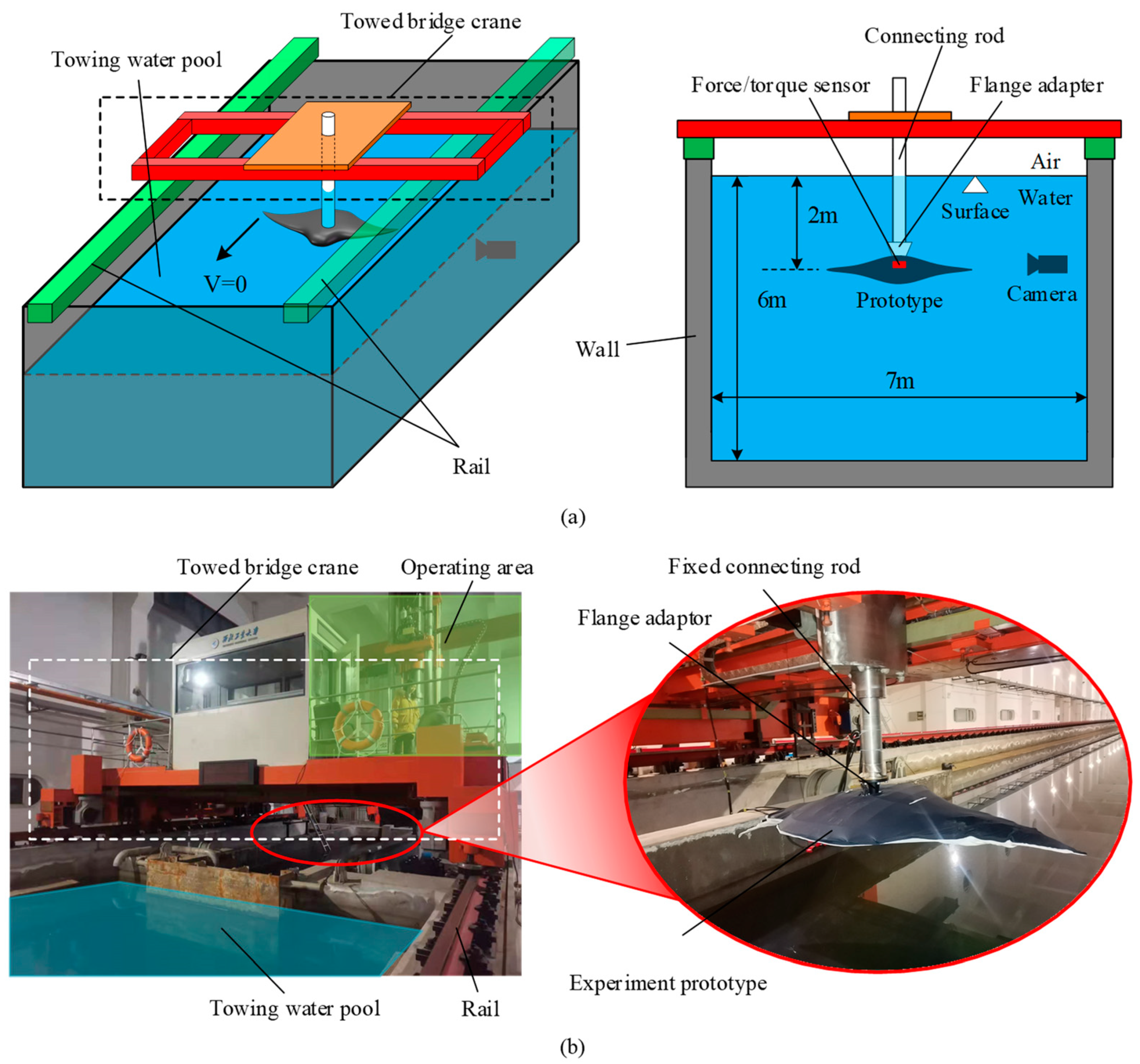
3.1. The Experimental Settings
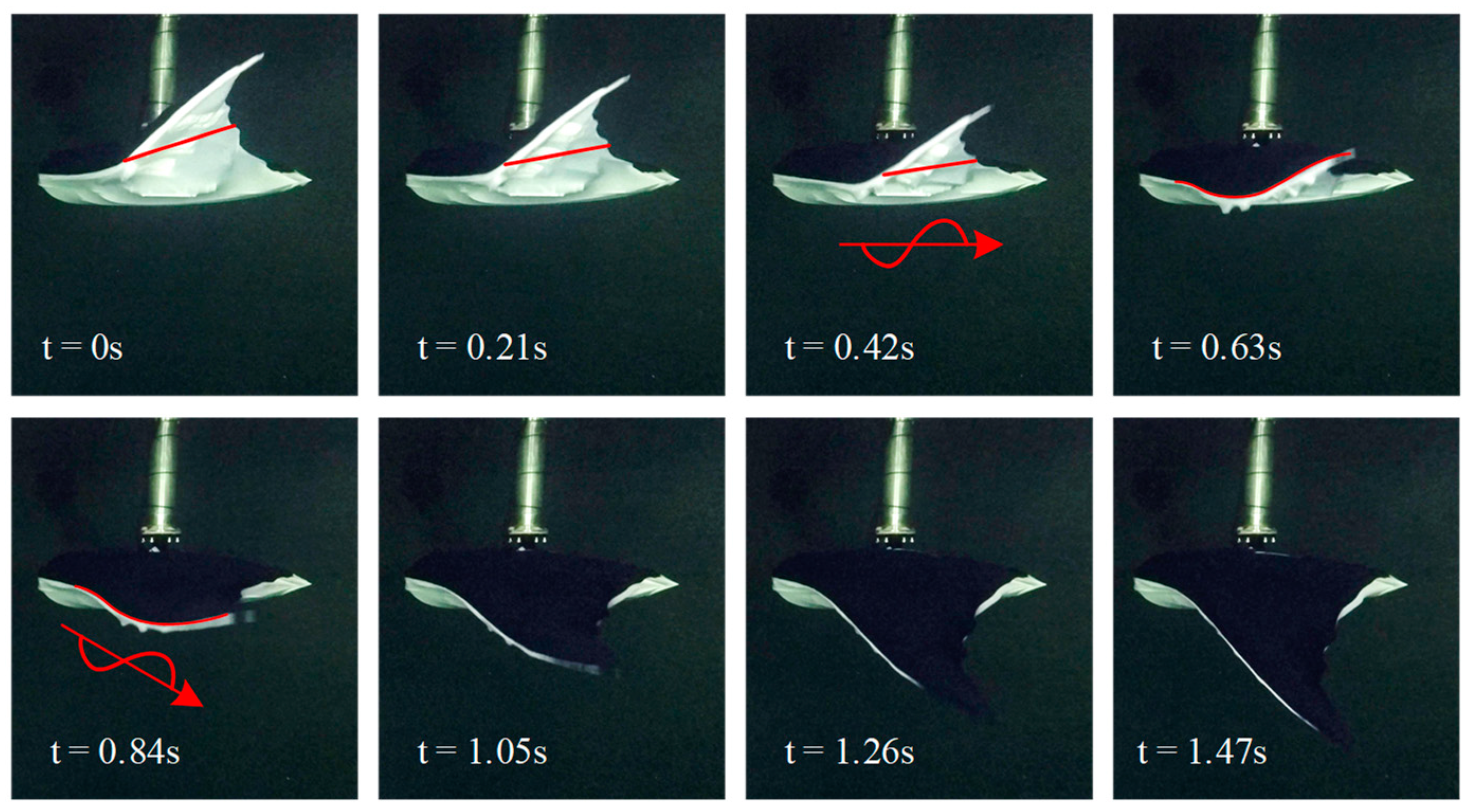
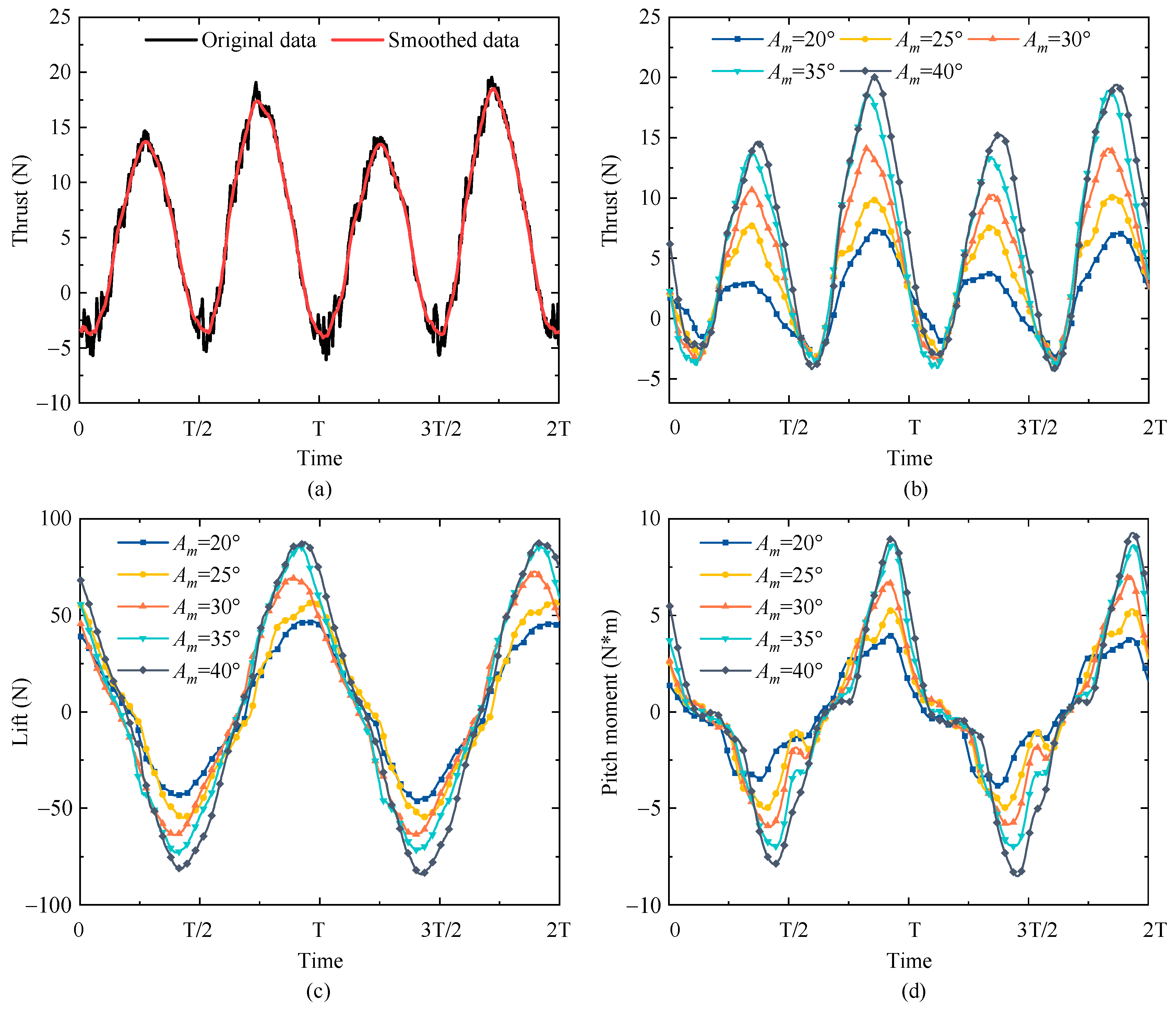
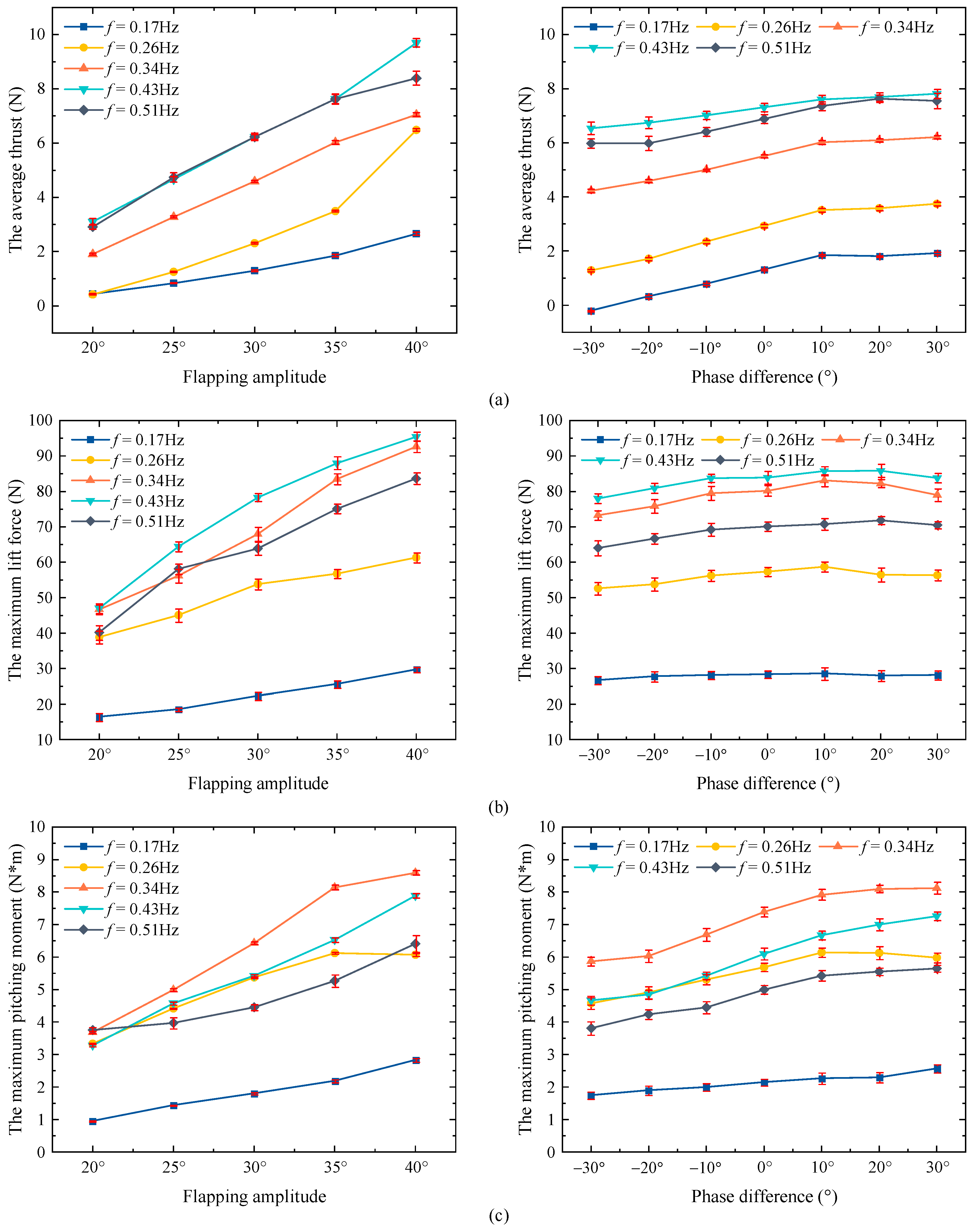
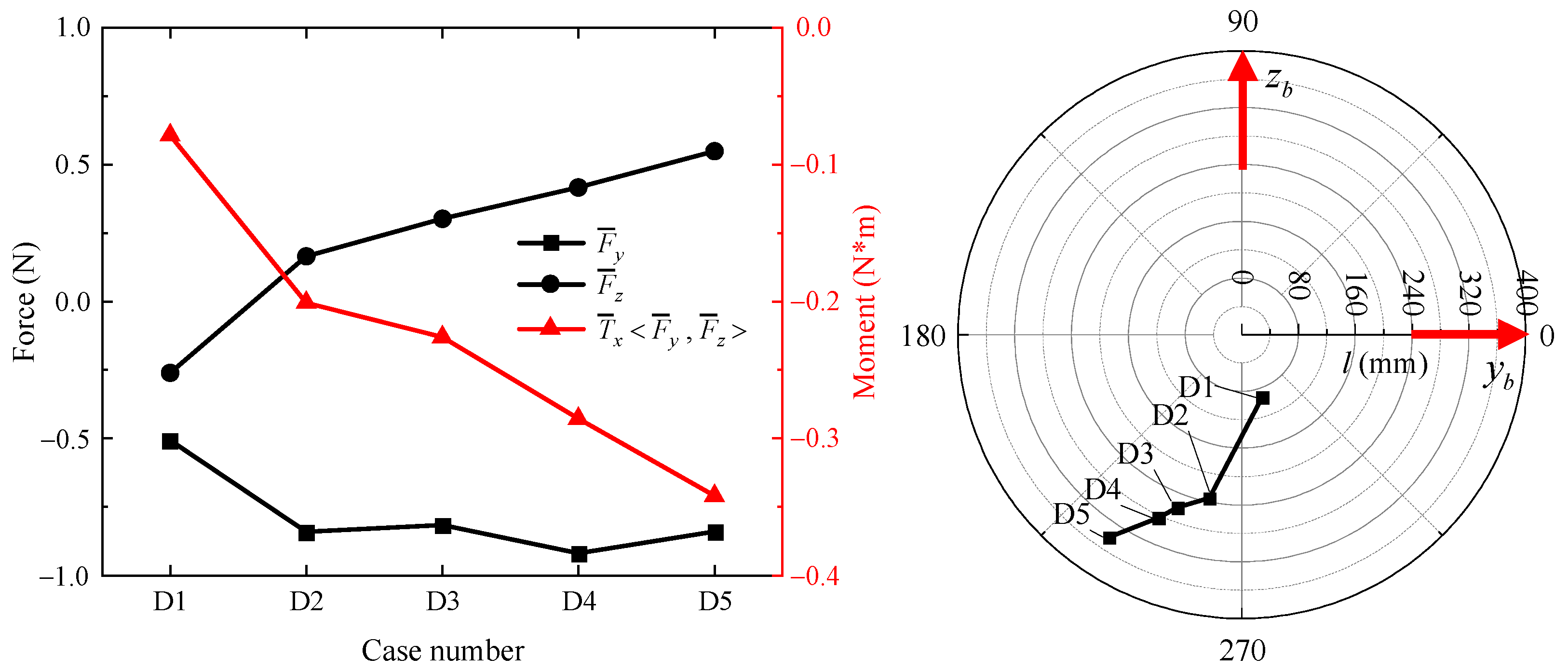
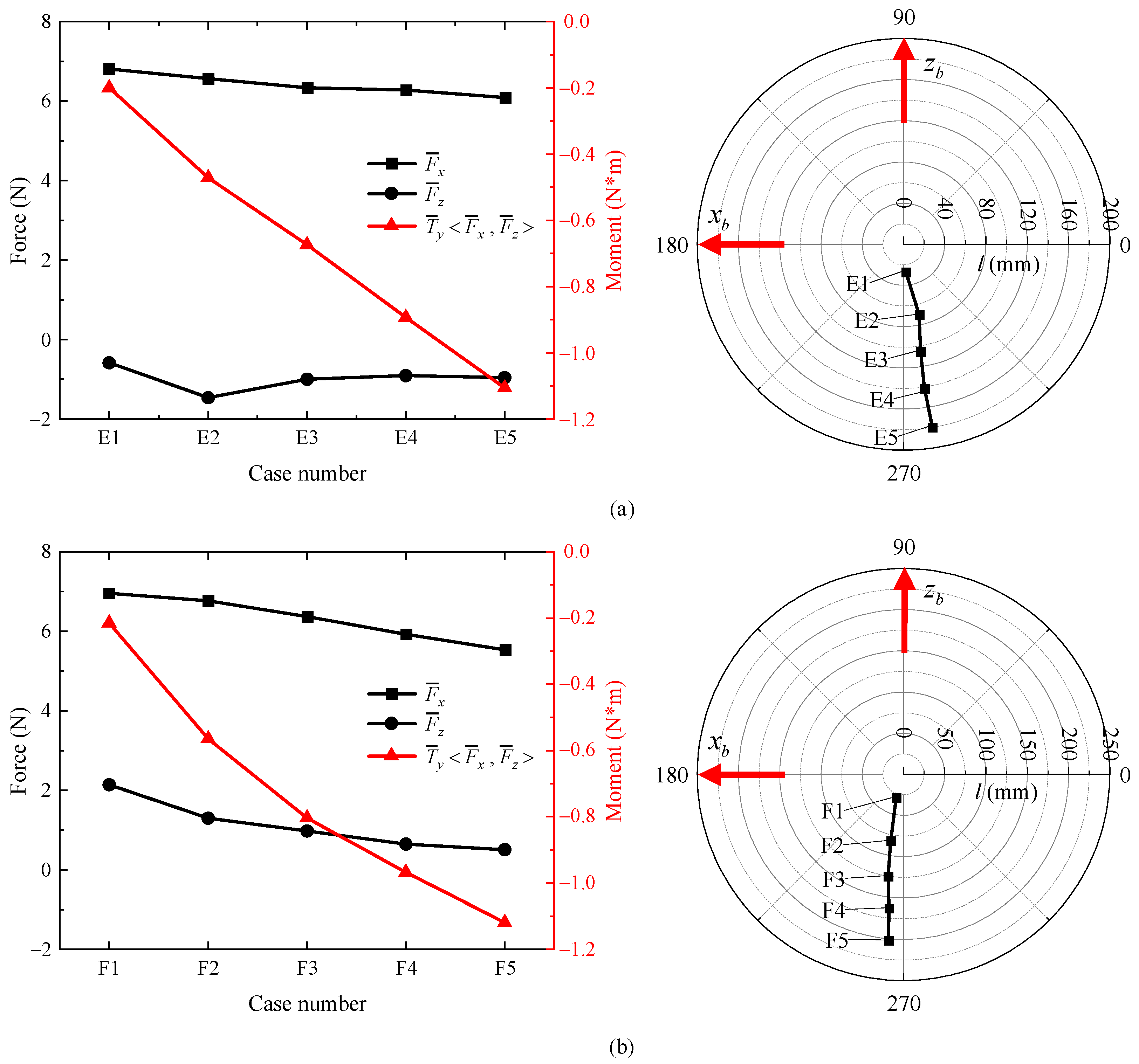
3.2. The Experimental Results
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Triantafyllou, M.S.; Triantafyllou, G.S. An efficient swimming machine. Sci. Am. 1995, 272, 64–74. [Google Scholar] [CrossRef]
- Altringham, J.D.; Ellerby, D.J. Fish swimming: Patterns in muscle function. J. Exp. Biol. 1999, 202, 3397–3403. [Google Scholar] [CrossRef]
- Blake, R.W. Swimming in the electric eels and knifefishes. Can. J. Zool. 1983, 61, 1432–1441. [Google Scholar] [CrossRef]
- Lauder, G.V.; Drucker, E.G. Forces, fishes, and fluids: Hydrodynamic mechanisms of aquatic locomotion. News Physiol. Sci. 2002, 17, 235–240. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Maciver, M.; Fontaine, E.; Burdick, J. Designing Future Underwater Vehicles: Principles and Mechanisms of the Weakly Electric Fish. IEEE J. Ocean. Eng. 2004, 29, 651–659. [Google Scholar] [CrossRef]
- Webb, P.W. Form and Function in Fish Swimming. Sci. Am. 1984, 251, 72–82. [Google Scholar] [CrossRef]
- Wang, T.M.; Yang, X.B.; Liang, J.H. A survey on bionic autonomous underwater vehicles propelled by median and/or paired fin mode. Robot 2013, 35, 352–363. [Google Scholar] [CrossRef]
- Xie, F.; Zuo, Q.; Chen, Q.; Fang, H.; He, K.; Du, R.; Zhong, Y.; Li, Z. Designs of the biomimetic robotic fishes performing body and/or caudal fin (BCF) swimming locomotion: A Review. J. Intell. Robot. Syst. 2021, 102, 1–19. [Google Scholar] [CrossRef]
- Scaradozzi, D.; Palmieri, G.; Costa, D.; Pinelli, A. BCF swimming locomotion for autonomous underwater robots: A review and a novel solution to improve control and efficiency. Ocean Eng. 2017, 130, 437–453. [Google Scholar] [CrossRef]
- Yu, J.; Wu, Z.; Su, Z.; Wang, T.; Qi, S. Motion Control Strategies for a Repetitive Leaping Robotic Dolphin. IEEE/ASME Trans. Mechatron. 2019, 24, 913–923. [Google Scholar] [CrossRef]
- Katzschmann, R.K.; Del Preto, J.; Mac Curdy, R.; Rus, D. Exploration of underwater life with an acoustically controlled soft robotic fish. Sci. Robot. 2018, 3, 3449. [Google Scholar] [CrossRef] [Green Version]
- Russo, R.S.; Blemker, S.S.; Fish, F.E.; Bart-Smith, H. Biomechanical model of batoid (skates and rays) pectoral fins predicts the influence of skeletal structure on fin kinematics: Implications for bio-inspired design. Bioinspir. Biomim. 2015, 10, 046002. [Google Scholar] [CrossRef] [Green Version]
- Sfakiotakis, M.; Lane, D.M.; Davies, J.B.C. Review of fish swimming modes for aquatic locomotion. IEEE J. Ocean. Eng. 1999, 24, 237–252. [Google Scholar] [CrossRef] [Green Version]
- Fish, F.E.; Schreiber, C.M.; Moored, K.W.; Liu, G.; Dong, H.; Bart-Smith, H. Hydrodynamic performance of aquatic flapping: Efficiency of underwater flight in the manta. Aerospace 2016, 3, 20. [Google Scholar] [CrossRef] [Green Version]
- Schaefer, J.T.; Summers, A.P. Batoid wing skeletal structure: Novel morphologies, mechanical implications, and phylogenetic patterns. J. Morphol. 2005, 264, 298–313. [Google Scholar] [CrossRef] [PubMed]
- Heine, C. Mechanics of Flapping Fin Locomotion in the Cownose Ray, Rhinoptera bonasus (Elasmobranchii: Myliobatidae). Ph.D. Thesis, Department of Zoology, Duke University, Durham, NC, USA, 1992. [Google Scholar]
- Rosenberger, L.J. Pectoral fin locomotion in batoid fishes: Undulation versus oscillation. J. Exp. Biol. 2001, 204, 379–394. [Google Scholar] [CrossRef] [PubMed]
- Dewey, P.A.; Carriou, A.; Smits, A.J. On the relationship between efficiency and wake structure of a batoid-inspired oscillating fin. J. Fluid Mech. 2011, 691, 245–266. [Google Scholar] [CrossRef]
- Liu, G.; Ren, Y.; Zhu, J.; Bart-Smith, H.; Dong, H. Thrust producing mechanisms in ray-inspired underwater vehicle propulsion. Theor. Appl. Mech. Lett. 2015, 5, 54–57. [Google Scholar] [CrossRef] [Green Version]
- Davis, H. Mechanization of Rajiform Swimming Motion: The Making of Robo-Ray; University of British Columbia: Vancouver, BC, Canada, 2002; Available online: https://www.researchgate.net/publication/266457567 (accessed on 14 January 2002).
- Robot Fish; Springer Tracts in Mechanical Engineering; Springer: Berlin/Heidelberg, Germany, 2015; pp. 219–253. [CrossRef]
- Chen, Z.; Um, T.I.; Zhu, J.; Bart-Smith, H. Bio-Inspired Robotic Cownose Ray Propelled by Electroactive Polymer Pectoral Fin. In Proceedings of the ASME 2011 International Mechanical Engineering Congress and Exposition, Denver, CO, USA, 11–17 November 2011; pp. 817–824. [Google Scholar] [CrossRef] [Green Version]
- Li, G.; Chen, X.; Zhou, F.; Liang, Y.; Xiao, Y.; Cao, X.; Zhang, Z.; Zhang, M.; Wu, B.; Yin, S.; et al. Self-powered soft robot in the Mariana Trench. Nature 2021, 591, 66–71. [Google Scholar] [CrossRef]
- Li, T.; Li, G.; Liang, Y.; Cheng, T.; Dai, J.; Yang, X.; Liu, B.; Zeng, Z.; Huang, Z.; Luo, Y.; et al. Fast-moving soft electronic fish. Sci. Adv. 2017, 3, e1602045. [Google Scholar] [CrossRef] [Green Version]
- Meng, Y.; Wu, Z.; Dong, H.; Wang, J.; Yu, J. Toward a Novel Robotic Manta with Unique Pectoral Fins. IEEE Trans. Syst. Man, Cybern. Syst. 2020, 1–11. [Google Scholar] [CrossRef]
- Cai, Y.; Chen, L.; Bi, S.; Li, G.; Zhang, H. Bionic Flapping Pectoral Fin with Controllable Spatial Deformation. J. Bionic Eng. 2019, 16, 916–930. [Google Scholar] [CrossRef]
- Animal Locomotion; Springer: Berlin/Heidelberg, Germany, 2010; pp. 3–15. [CrossRef]
- Cao, Y. Applying CPG to Study Manta Rotofish. Ph.D. Thesis, School of Mechanical Engineering and Automation, Beihang University, Beijing, China, 2015. [Google Scholar]
- Cao, Y.; Lu, Y.; Cai, Y.; Bi, S.; Pan, G. CPG-fuzzy-based control of a cownose-ray-like fish robot. Ind. Robot. Int. J. Robot. Res. Appl. 2019, 46, 779–791. [Google Scholar] [CrossRef]
- Michelin, S.; Llewellyn Smith, S.G. Resonance and propulsion performance of a heaving flexible wing. Phys. Fluids 2009, 21, 071902. [Google Scholar] [CrossRef] [Green Version]
- Aiello, B.R.; Hardy, A.R.; Cherian, C.; Olsen, A.M.; Ahn, S.E.; Hale, M.E.; Westneat, M.W. The relationship between pectoral fin ray stiffness and swimming behavior in Labridae: Insights into design, performance, and ecology. J. Exp. Biol. 2018, 221, jeb163360. [Google Scholar] [CrossRef] [PubMed] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Force/Torque | Sensing Ranges | Resolutions | Measuring Accuracy |
|---|---|---|---|
| 580 N | 1/4 N | 0.043% FR (full-range) | |
| 1160 N | 1/4 N | 0.022% FR | |
| 20 N∗m | 1/188 N∗m | 0.026% FR | |
| 20 N∗m | 1/376 N∗m | 0.013% FR |
| Item | Values |
|---|---|
| Dimension of towing water pool | 170 m × 7 m × 6 m |
| Towing speed | 0 m/s |
| Prototype body length | 1 m |
| Prototype span length | 2 m |
| Prototype weight | 30 kg |
| Motor power | 60 W × 4 |
| Parameters | Value | ||||||
|---|---|---|---|---|---|---|---|
| Frequency | 0.17 Hz | 0.26 Hz | 0.34 Hz | 0.43 Hz | 0.51 Hz | ||
| Amplitude | 20° | 25° | 30° | 35° | 40° | ||
| Phase difference | −30° | −20° | −10° | 0° | 10° | 20° | 30° |
| Number | Case B | Case C | Case D | Case E | Case F |
|---|---|---|---|---|---|
| 1 | |||||
| 2 | |||||
| 3 | |||||
| 4 | |||||
| 5 | |||||
| 6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing, C.; Cao, Y.; Cao, Y.; Pan, G.; Huang, Q. Asymmetrical Oscillating Morphology Hydrodynamic Performance of a Novel Bionic Pectoral Fin. J. Mar. Sci. Eng. 2022, 10, 289. https://doi.org/10.3390/jmse10020289
Xing C, Cao Y, Cao Y, Pan G, Huang Q. Asymmetrical Oscillating Morphology Hydrodynamic Performance of a Novel Bionic Pectoral Fin. Journal of Marine Science and Engineering. 2022; 10(2):289. https://doi.org/10.3390/jmse10020289
Chicago/Turabian StyleXing, Cheng, Yong Cao, Yonghui Cao, Guang Pan, and Qiaogao Huang. 2022. "Asymmetrical Oscillating Morphology Hydrodynamic Performance of a Novel Bionic Pectoral Fin" Journal of Marine Science and Engineering 10, no. 2: 289. https://doi.org/10.3390/jmse10020289