
Learning-Based Nonlinear Model Predictive Controller for Hydraulic Cylinder Control of Ship Steering System

Abstract
:1. Introduction
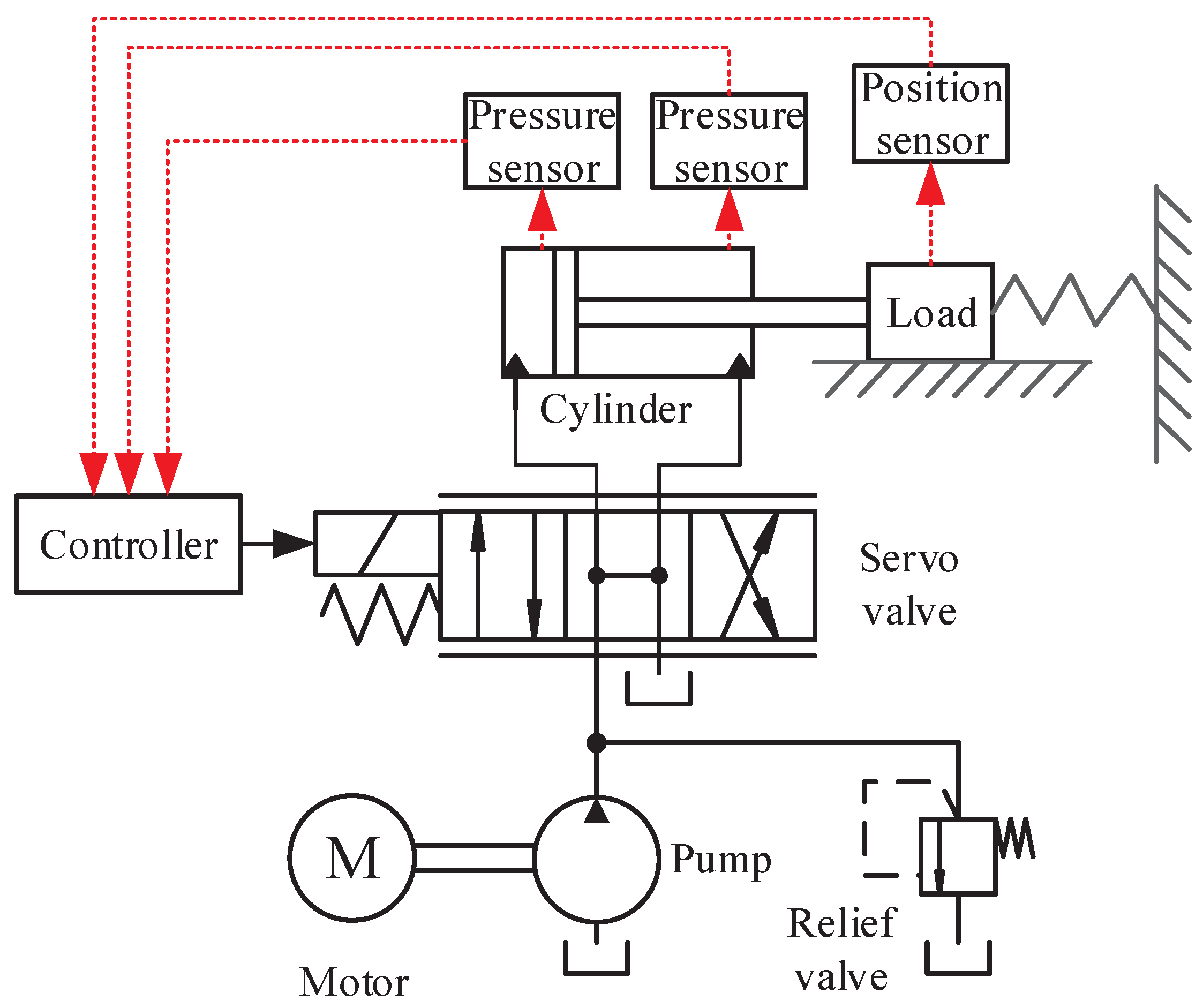
2. Modeling of Valve-Controlled Hydraulic System
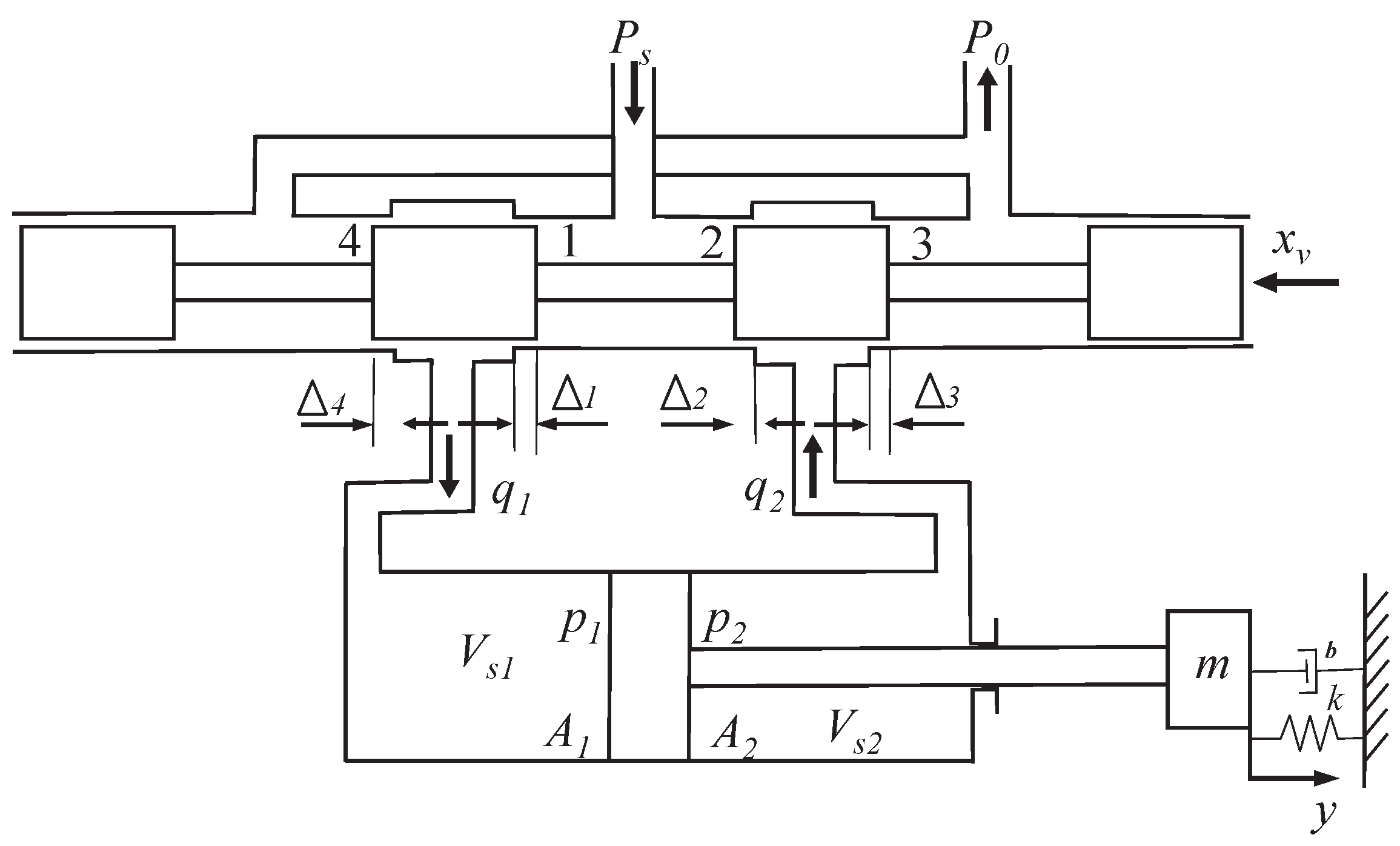
2.1. Solenoid Valve
2.2. Solenoid Valve Working at Left End
2.3. Solenoid Valve Working at Right End
2.4. Dynamical Model of the Cylinder
2.5. Model of Nonlinear State
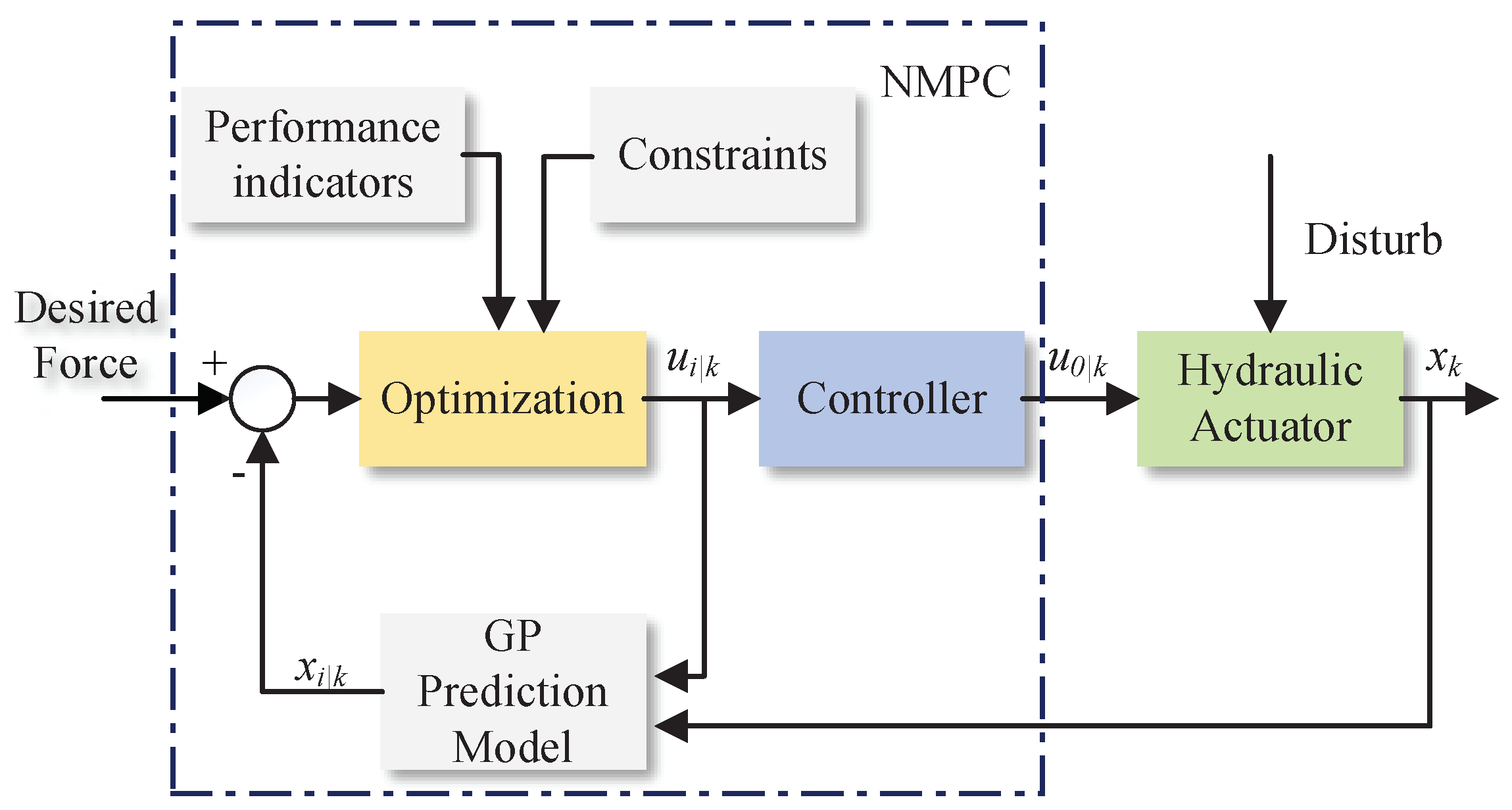
3. Algorithm Design
3.1. Model Predictive Control
- Assumption 1:
- is the uncertainty in the process of the hydraulic system and we consider it to obey the normal distribution at each sampling time k.
- Assumption 2:
- The nonlinear hydraulic valve control system (14) is controllable and observable. is a continuous Lipschitz function.
- Assumption 3:
- For the initial conditions, the nonlinear hydraulic valve control system model has a unique solution, that is, there exists an optimal control policy .
- Assumption 4:
- is the uncertainty in the process of the hydraulic system and we consider it to obey the normal distribution at each sampling time k.
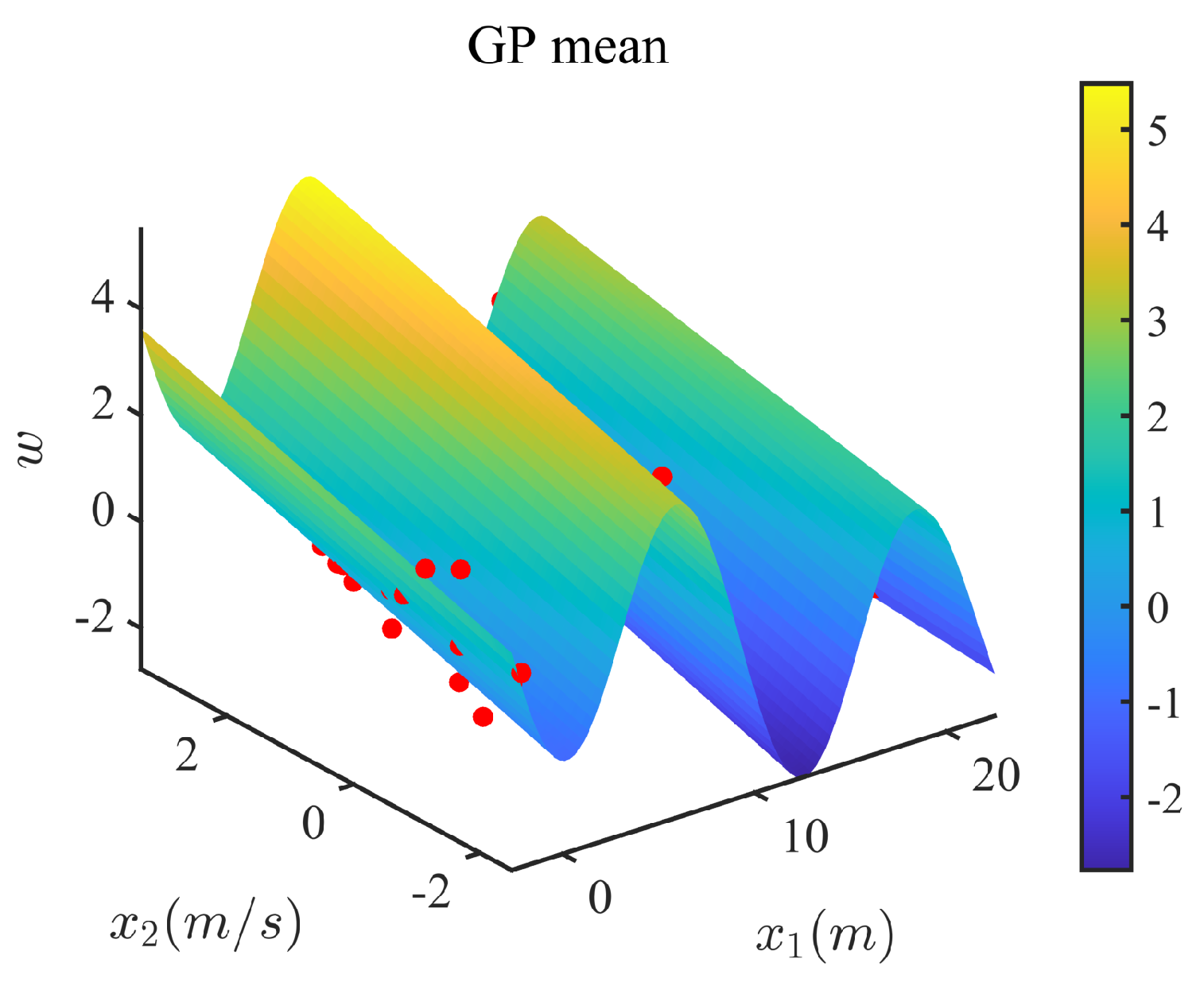
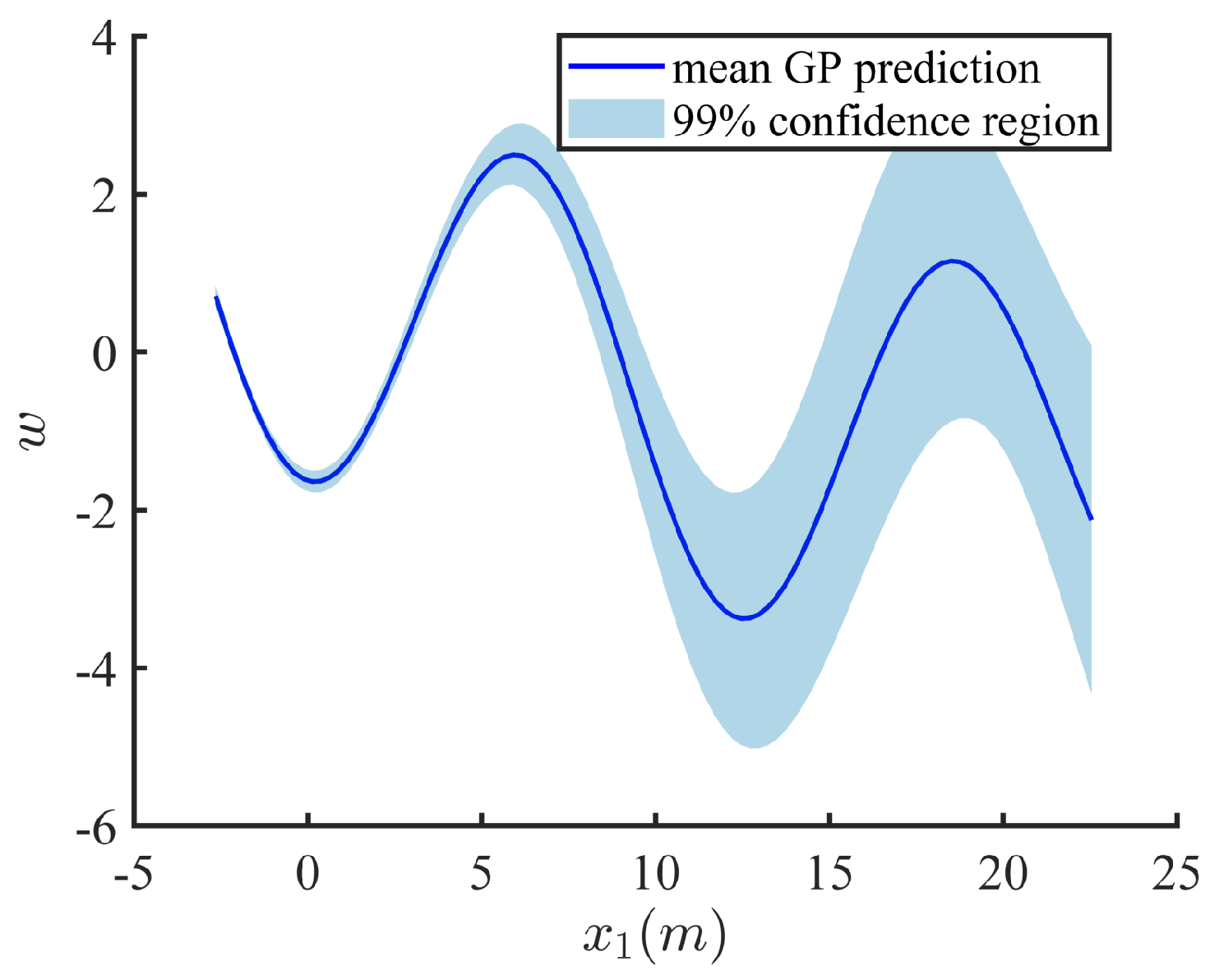
3.2. Model Predictive Control with Gaussian Process Uncertainty Models
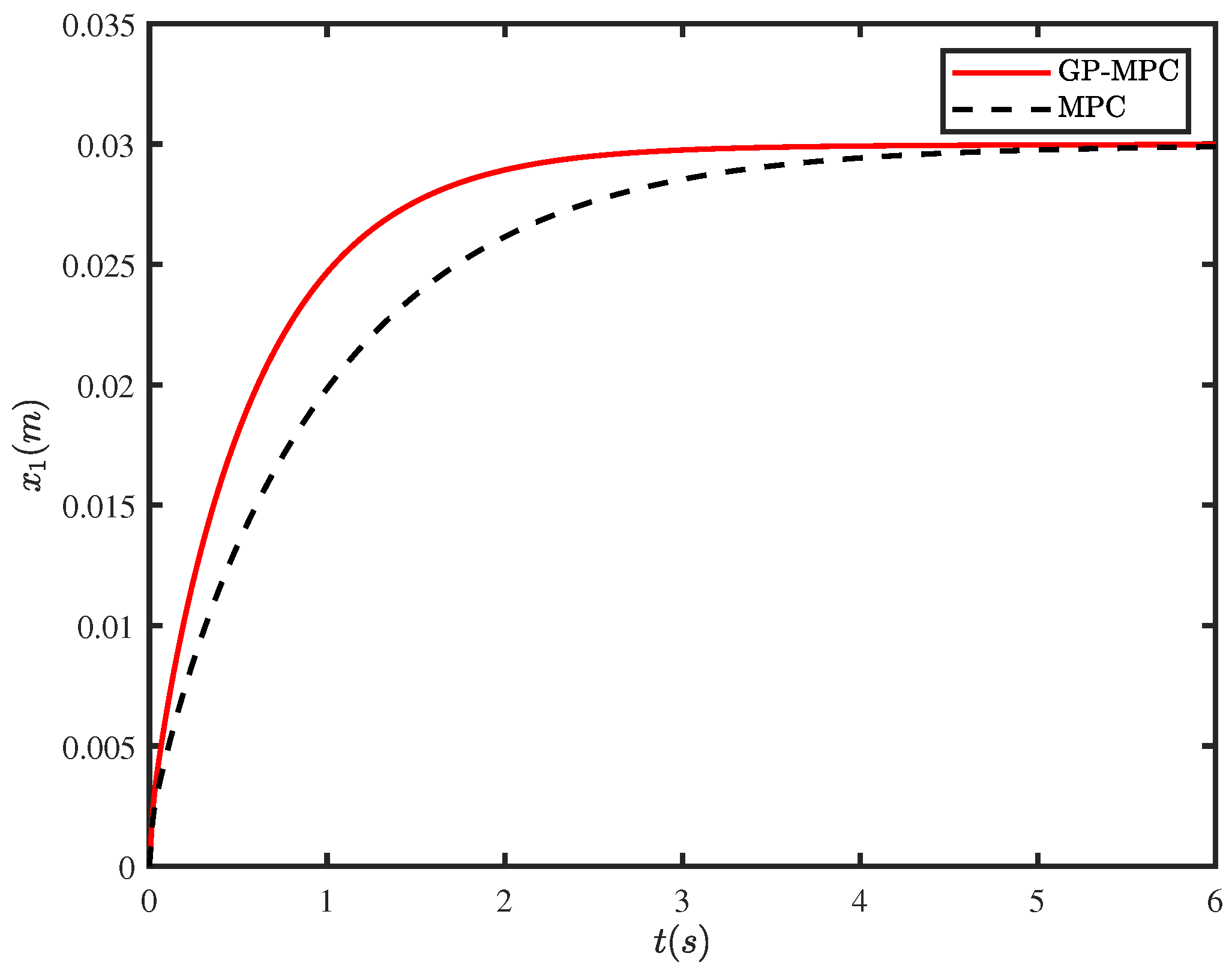
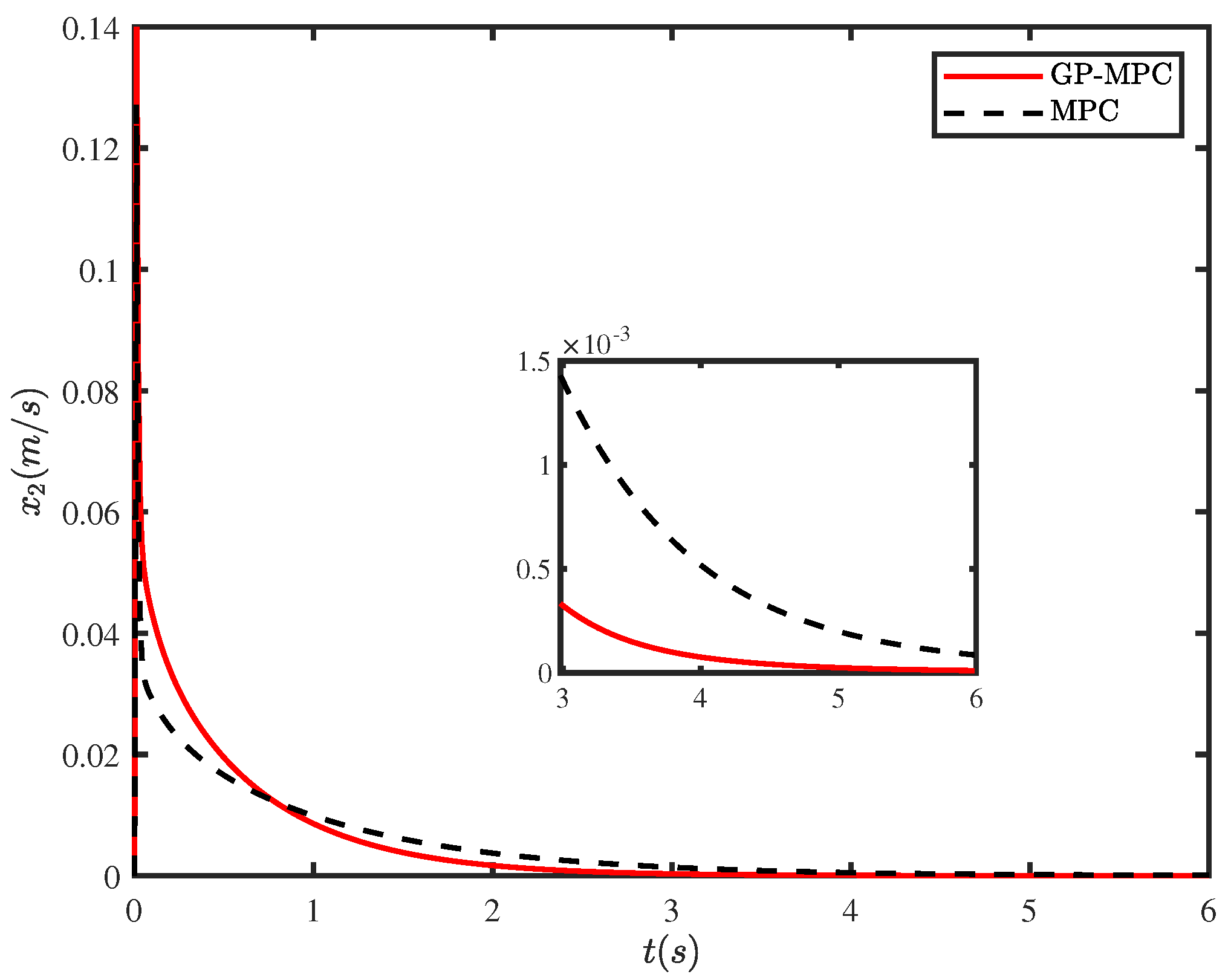
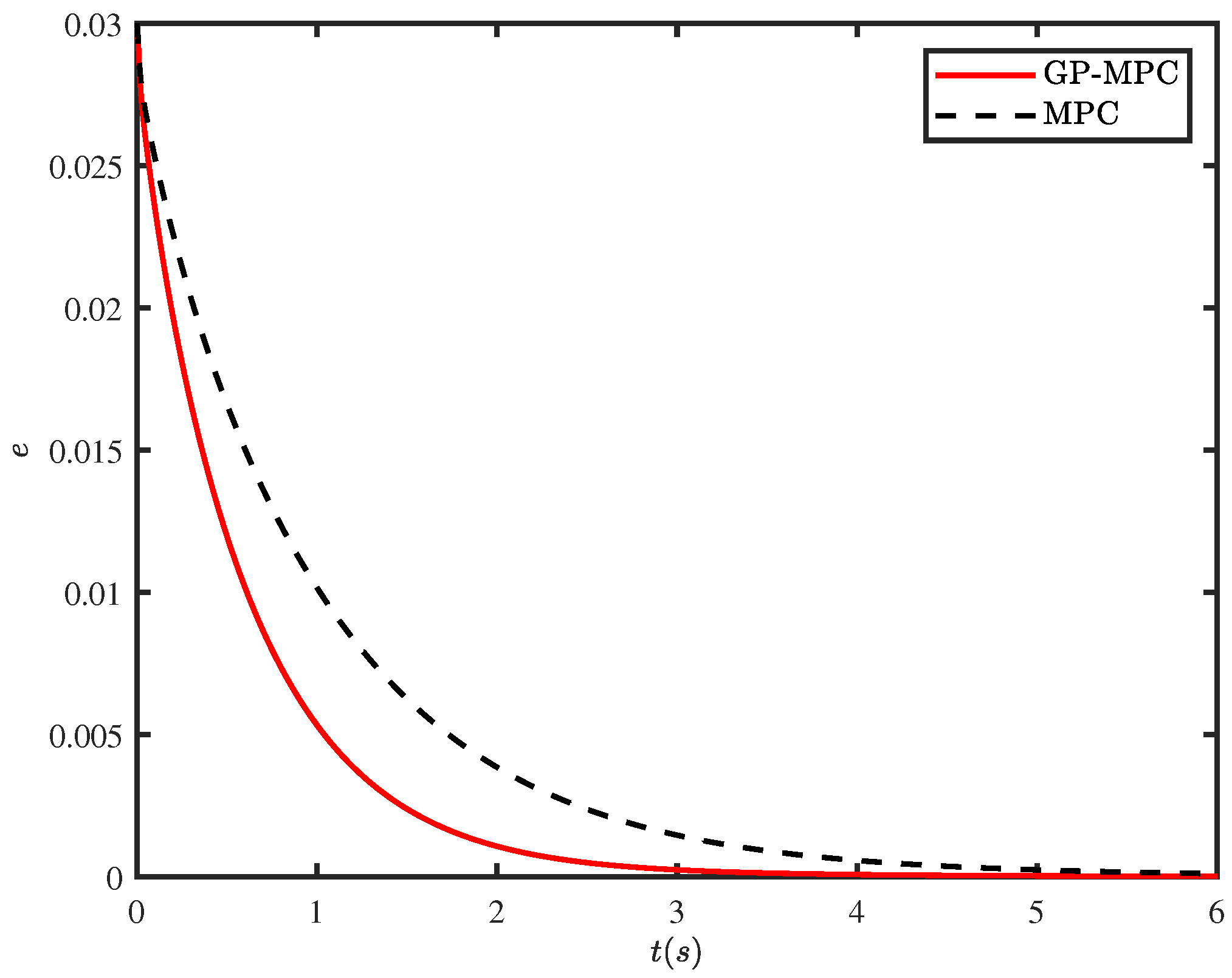
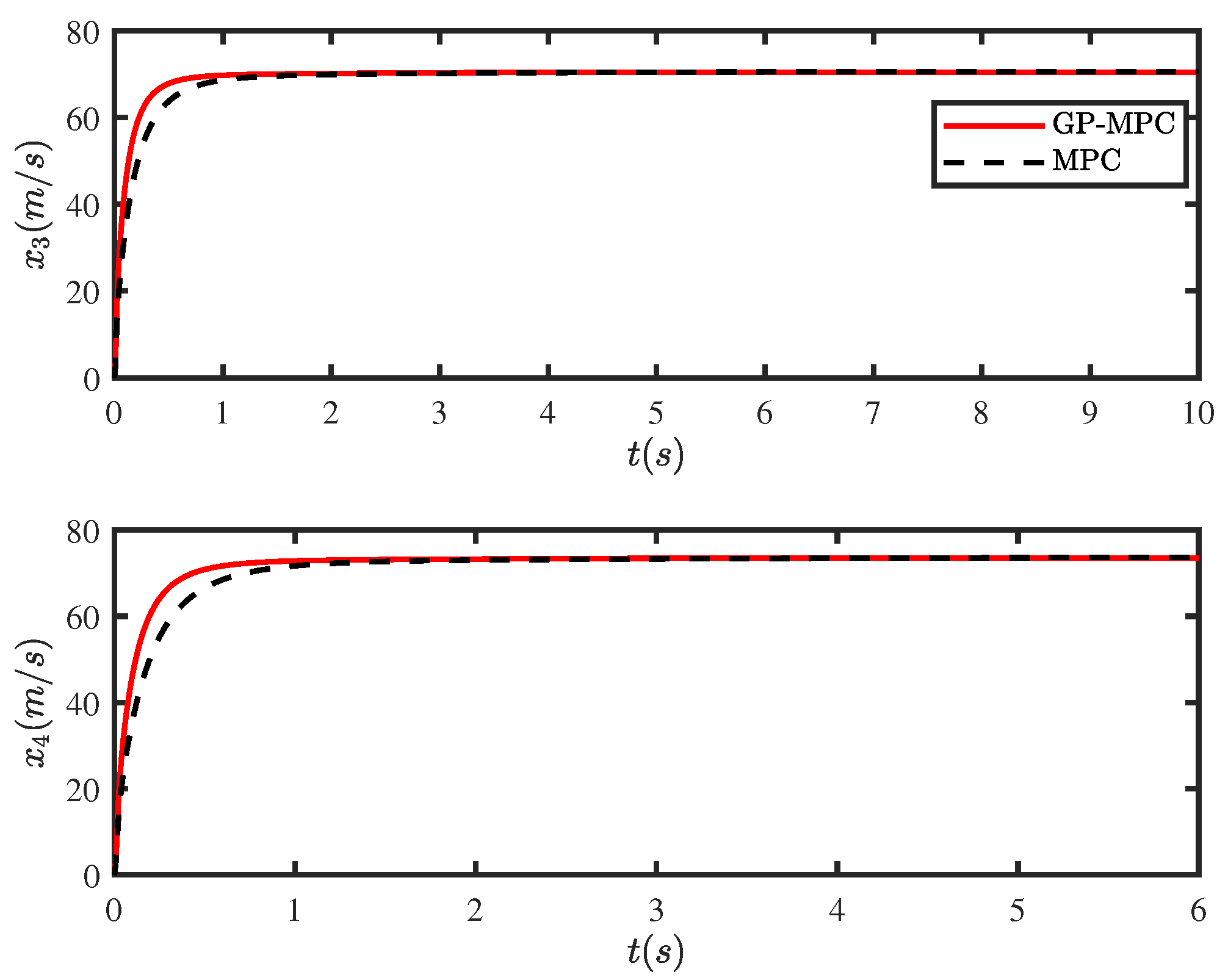
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| LB-NMPC | Learning Based Nonlinear Model Predictive Controller |
| MPC | Model Predictive Controller |
| GP | Gaussian process |
| PID | Proportional Integral Derivative |
| FLC | Fuzzy logic control |
| SVM | Support vector machine |
References
- Semini, C.; Tsagarakis, N.G.; Guglielmino, E.; Focchi, M.; Cannella, F.; Caldwell, D.G. Design of HyQ-a hydraulically and electrically actuated quadruped robot. IMechE Part I J. Syst. Control Eng. 2011, 225, 831–849. [Google Scholar] [CrossRef]
- Khamitov, A.; Swanson, J.; Van de Ven, J.; Severson, E.L. Modeling, Design, and Testing of a Linear Electric-Hydraulic Conversion Machine for Electrification of Off-Highway Vehicles. IEEE Trans. Ind. Appl. 2021, 57, 2449–2459. [Google Scholar] [CrossRef]
- Mao, Z.; Tao, R.; Chen, F.; Bi, H.; Cao, J.; Luo, Y.; Fan, H.; Wang, Z. Investigation of the starting-up axial hydraulic force and structure characteristics of pump turbine in pump mode. J. Mar. Sci. Eng. 2021, 9, 158. [Google Scholar] [CrossRef]
- Palma, G.; Mizar Formentin, S.; Zanuttigh, B.; Contestabile, P.; Vicinanza, D. Numerical simulations of the hydraulic performance of a breakwater-integrated overtopping wave energy converter. J. Mar. Sci. Eng. 2019, 7, 38. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.B.; Li, L.; Yan, Y.K.; Wang, P.J.; Wei, W. An Energy-Saving Position Control Strategy for Deep-Sea Valve-Controlled Hydraulic Cylinder Systems. J. Mar. Sci. Eng. 2022, 10, 567. [Google Scholar] [CrossRef]
- Sliwinski, P. The methodology of design of axial clearances compensation unit in hydraulic satellite displacement machine and their experimental verification. Arch. Civ. Mech. Eng. 2019, 19, 1163–1182. [Google Scholar] [CrossRef]
- Chiang, M.H.; Chen, C.C.; Kuo, J. The high response and high efficiency velocity control of a hydraulic injection molding machine using a variable rotational speed electro-hydraulic pump-controlled system. Int. J. Adv. Manuf. Technol. 2009, 43, 841–851. [Google Scholar] [CrossRef]
- Chrouta, J.; Chakchouk, W.; Zaafouri, A.; Jemli, M. Modeling and Control of an Irrigation Station Process Using Heterogeneous Cuckoo Search Algorithm and Fuzzy Logic Controller. IEEE Trans. Ind. Appl. 2019, 55, 976–990. [Google Scholar] [CrossRef]
- Kumari, R.; Prabhakaran, K.K.; Desingu, K.; Chelliah, T.R.; Sarma, S.V.A. Improved Hydroturbine Control and Future Prospects of Variable Speed Hydropower Plant. IEEE Trans. Ind. Appl. 2021, 57, 941–952. [Google Scholar] [CrossRef]
- Wang, C.N.; Yang, F.C.; Nguyen, V.T.T.; Vo, N.T.M. CFD Analysis and Optimum Design for a Centrifugal Pump Using an Effectively Artificial Intelligent Algorithm. Micromachines 2022, 13, 1208. [Google Scholar] [CrossRef]
- Liu, S.; Yao, B. Automated onboard modeling of cartridge valve flow mapping. IEEE/ASME Trans. Mechatronics 2006, 11, 381–388. [Google Scholar]
- Song, L.; Bin, Y. Coordinate Control of Energy Saving Programmable Valves. IEEE Trans. Control. Syst. Technol. 2008, 16, 34–45. [Google Scholar]
- Yao, J.; Jiao, Z.; Ma, D. Extended-State-Observer-Based Output Feedback Nonlinear Robust Control of Hydraulic Systems with Backstepping. IEEE Trans. Ind. Electron. 2014, 61, 6285–6293. [Google Scholar] [CrossRef]
- Jianyong, Y.; Zongxia, J.; Dawei, M. A Practical Nonlinear Adaptive Control of Hydraulic Servomechanisms With Periodic-Like Disturbances. IEEE/ASME Trans. Mechatron. 2015, 20, 2752–2760. [Google Scholar]
- Xu, X.; Chen, H.; Lian, C.; Li, D. Learning-Based Predictive Control for Discrete-Time Nonlinear Systems With Stochastic Disturbances. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 6202–6213. [Google Scholar] [CrossRef]
- Nguyen, T.; Huynh, T.; Vu Ngoc, C.; Kieu, V.; Huang, S.C. Optimizing compliant gripper mechanism design by employing an effective bi-algorithm: Fuzzy logic and ANFIS. Microsyst. Technol. 2021, 27, 1–24. [Google Scholar] [CrossRef]
- Mozaffari, A.; Vajedi, M.; Azad, N.L. A robust safety-oriented autonomous cruise control scheme for electric vehicles based on model predictive control and online sequential extreme learning machine with a hyper-level fault tolerance-based supervisor. Neurocomputing 2015, 151, 845–856. [Google Scholar] [CrossRef]
- Giraldo, S.A.C.; Flesch, R.C.C.; Normey-Rico, J.E.; Sejas, M.Z.P. A Method for Designing Decoupled Filtered Smith Predictor for Square MIMO Systems with Multiple Time Delays. IEEE Trans. Ind. Appl. 2018, 54, 6439–6449. [Google Scholar] [CrossRef]
- Qi, F.; Stippich, A.; Ralev, I.; Klein-Hessling, A.; De Doncker, R.W. Model Predictive Control of a Switched Reluctance Machine for Guaranteed Overload Torque. IEEE Trans. Ind. Appl. 2019, 55, 1321–1331. [Google Scholar] [CrossRef]
- Ostafew, C.J.; Schoellig, A.P.; Barfoot, T.D. Robust Constrained Learning-based NMPC enabling reliable mobile robot path tracking. Int. J. Robot. Res. 2016, 35, 1547–1563. [Google Scholar] [CrossRef]
- Xiong, Z.; Tao, J.; Zhang, F. A Model Predictive Control Strategy of Pump-controlled Asymmetric Cylinders Using State Estimation. J. Xi’an Jiaotong Univ. 2017, 51, 109–115. [Google Scholar]
- Yang, T.; Tao, J.; Qin, C. Model Predictive Control of Asymmetric Valve Control Hydraulic Cylinders Based on Support Vector Machine and Sequential Quadratic Programming Algorithm. J. Xi’an Jiaotong Univ. 2020, 54, 93–100. [Google Scholar]
- Deldar, M.; Izadian, A.; Vaezi, M.; Anwar, S. Modeling of a Hydraulic Wind Power Transfer Utilizing a Proportional Valve. IEEE Trans. Ind. Appl. 2015, 51, 1837–1844. [Google Scholar] [CrossRef] [Green Version]
- Karg, B.; Lucia, S. Learning-based approximation of robust nonlinear predictive control with state estimation applied to a towing kite. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019; pp. 16–22. [Google Scholar]
- Mehndiratta, M.; Kayacan, E. A constrained instantaneous learning approach for aerial package delivery robots: Onboard implementation and experimental results. Auton. Robot. 2019, 43, 2209–2228. [Google Scholar] [CrossRef]
- Aswani, A.; Gonzalez, H.; Sastry, S.S.; Tomlin, C. Provably Safe and Robust Learning-Based Model Predictive Control. Automatica 2013, 49, 1216–1226. [Google Scholar] [CrossRef]
- Busoniu, L.; De Bruin, T.; Tolic, D.; Kober, J.; Palunko, I. Reinforcement learning for control: Performance, stability, and deep approximators. Annu. Rev. Control 2018, 46, 8–28. [Google Scholar] [CrossRef]
- Datta, A.; Augustin, M.J.; Gupta, N.; Viswamurthy, S.R.; Gaddikeri, K.M.; Sundaram, R. Impact Localization and Severity Estimation on Composite Structure Using Fiber Bragg Grating Sensors by Least Square Support Vector Regression. IEEE Sens. J. 2019, 19, 4463–4470. [Google Scholar] [CrossRef]
- Bozorgi, A.M.; Gholami-Khesht, H.; Farasat, M.; Mehraeen, S.; Monfared, M. Model Predictive Direct Power Control of Three-Phase Grid-Connected Converters With Fuzzy-Based Duty Cycle Modulation. IEEE Trans. Ind. Appl. 2018, 54, 4875–4885. [Google Scholar] [CrossRef]
- Fairbank, M.; Li, S.; Fu, X.; Alonso, E.; Wunsch, D. An adaptive recurrent neural-network controller using a stabilization matrix and predictive inputs to solve a tracking problem under disturbances. Neural Netw. 2014, 49, 74–86. [Google Scholar] [CrossRef] [Green Version]
- Karg, B.; Lucia, S. Efficient representation and approximation of model predictive control laws via deep learning. IEEE Trans. Cybern. 2020, 50, 3866–3878. [Google Scholar] [CrossRef]
- Park, J.; Sandberg, I. Universal Approximation Using Radial-Basis-Function Networks. Neural Comput. 2014, 3, 246–257. [Google Scholar] [CrossRef]
- Bonzanini, A.D.; Paulson, J.A.; Makrygiorgos, G.; Mesbah, A. Fast approximate learning-based multistage nonlinear model predictive control using Gaussian processes and deep neural networks. Comput. Chem. Eng. 2021, 145, 107174. [Google Scholar] [CrossRef]
- Hewing, L.; Wabersich, K.P.; Menner, M.; Zeilinger, M.N. Learning-Based Model Predictive Control: Toward Safe Learning in Control. Annu. Rev. Control. Robot. Auton. Syst. 2020, 3, 269–296. [Google Scholar] [CrossRef]
- Hongbo, G.; Yongtao, S.; LI Lei, e.a. Nonlinear Modeling and Validation of Hydraulic Valve-controlled Cylinder Power Mechanism. Mach. Des. Manuf. Engeering 2018, 47, 95–98. [Google Scholar]
- Meng, F.; Shen, X.; Karimi, H.R. Emerging methodologies in stability and optimization problems of learning-based nonlinear model predictive control: A survey. Int. J. Circuit Theory Appl. 2022, 50, 4146–4170. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Spec |
|---|---|
| Mass of load | 100 kg |
| Piston diameter | 0.12 m |
| Rod diameter | 0.025 m |
| Length of stroke | 1 m |
| Dead volume at port 1 end | 0.00005 m |
| Dead volume at port 2 end | 0.00005 m |
| Valve rated current | 40 mA |
| Valve natural frequency | 80 Hz |
| Characteristic flow rate at maximum opening | 80 L/min |
| Pressure drop | 10 bar |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, X.; Wu, C.; Xu, X. Learning-Based Nonlinear Model Predictive Controller for Hydraulic Cylinder Control of Ship Steering System. J. Mar. Sci. Eng. 2022, 10, 2033. https://doi.org/10.3390/jmse10122033
Tang X, Wu C, Xu X. Learning-Based Nonlinear Model Predictive Controller for Hydraulic Cylinder Control of Ship Steering System. Journal of Marine Science and Engineering. 2022; 10(12):2033. https://doi.org/10.3390/jmse10122033
Chicago/Turabian StyleTang, Xiaolong, Changjie Wu, and Xiaoyan Xu. 2022. "Learning-Based Nonlinear Model Predictive Controller for Hydraulic Cylinder Control of Ship Steering System" Journal of Marine Science and Engineering 10, no. 12: 2033. https://doi.org/10.3390/jmse10122033