
Experimental Study on the Target–Receiver Formation Problem with the Exploitation of Coherent and Non-Coherent Bearing Information
Abstract
:1. Introduction
2. Problem Description and Its Proposed Solution
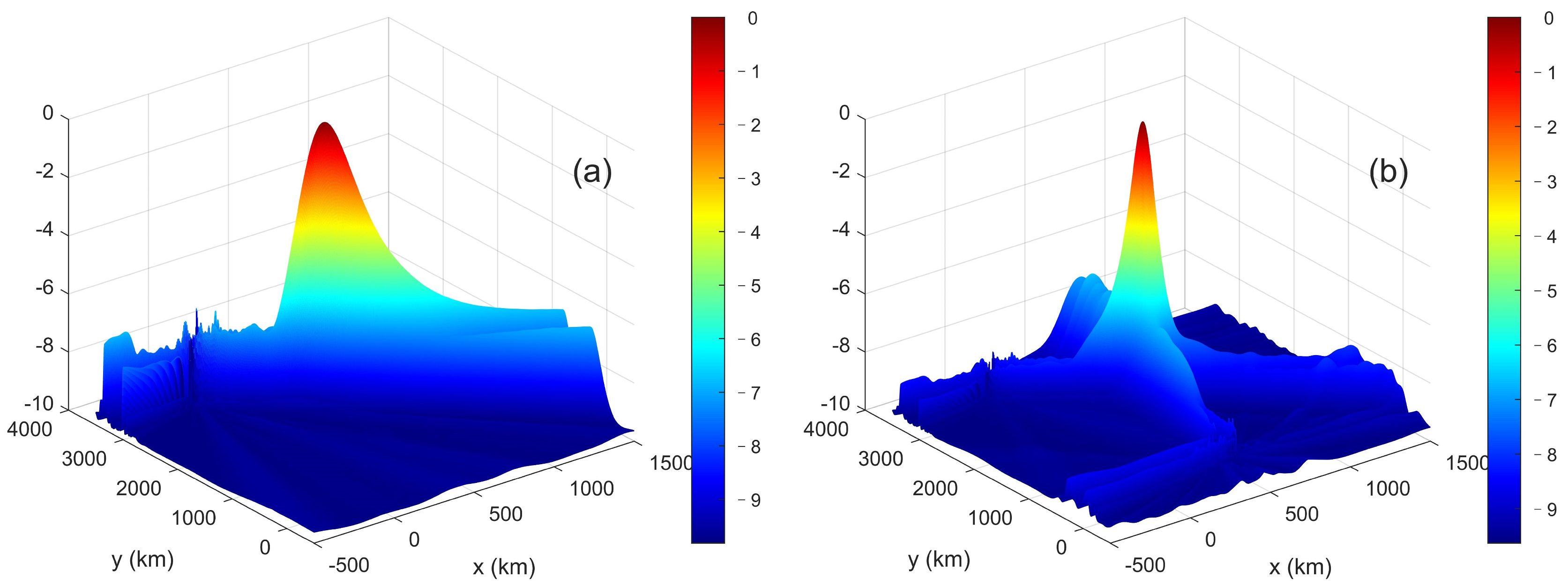
2.1. Global Coherent Processing
2.2. Non-Coherent Processing
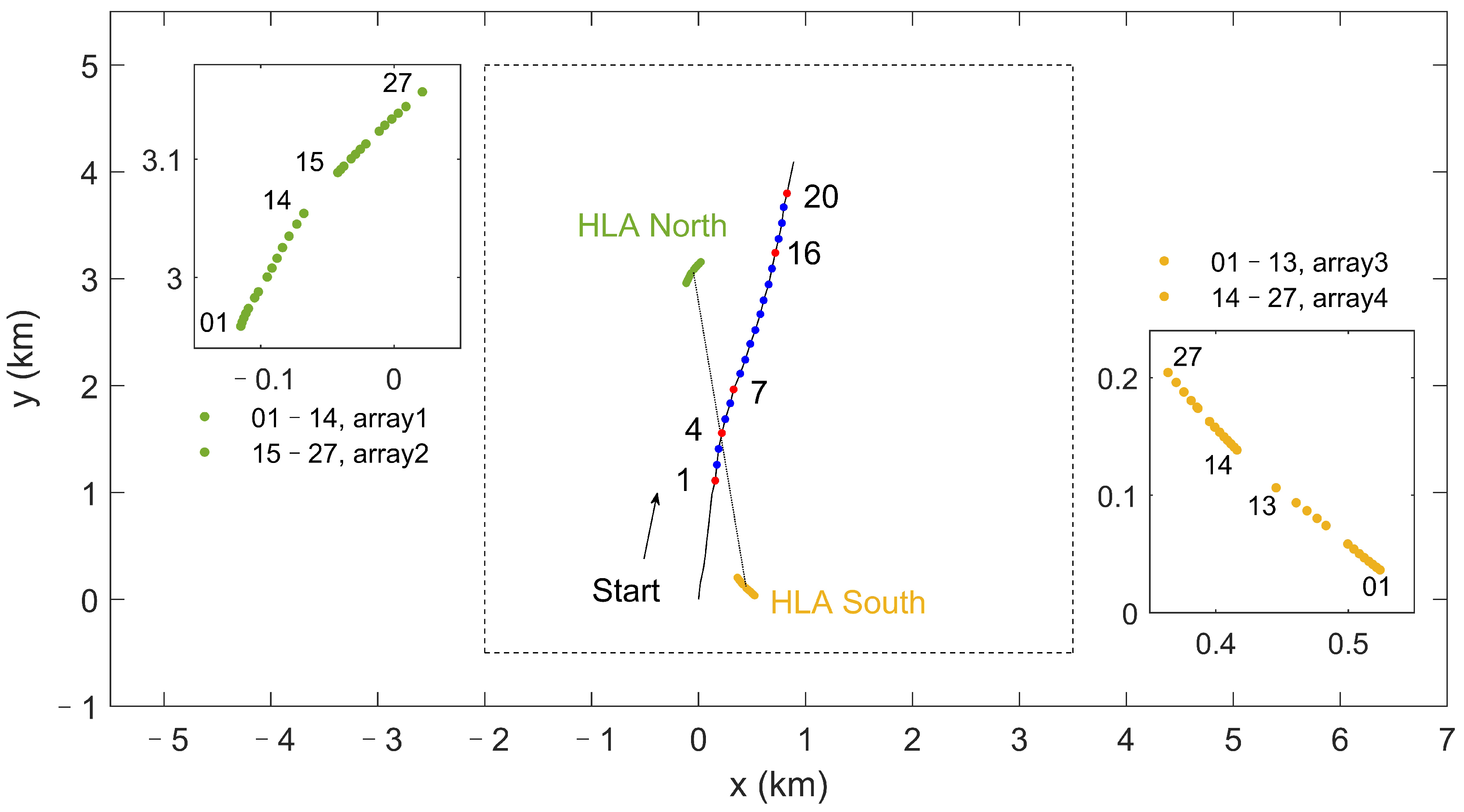
3. Application to Experimental Data
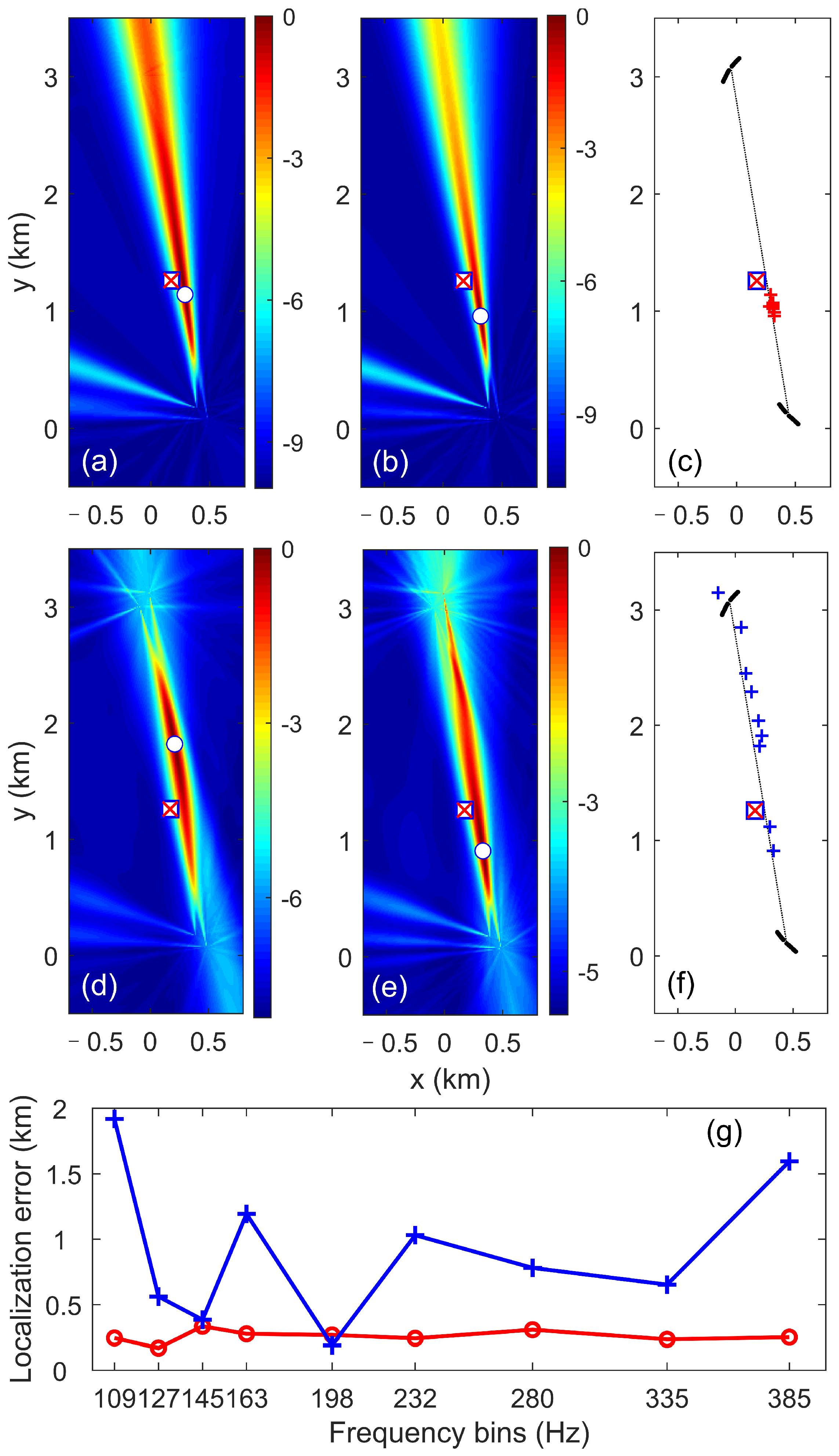
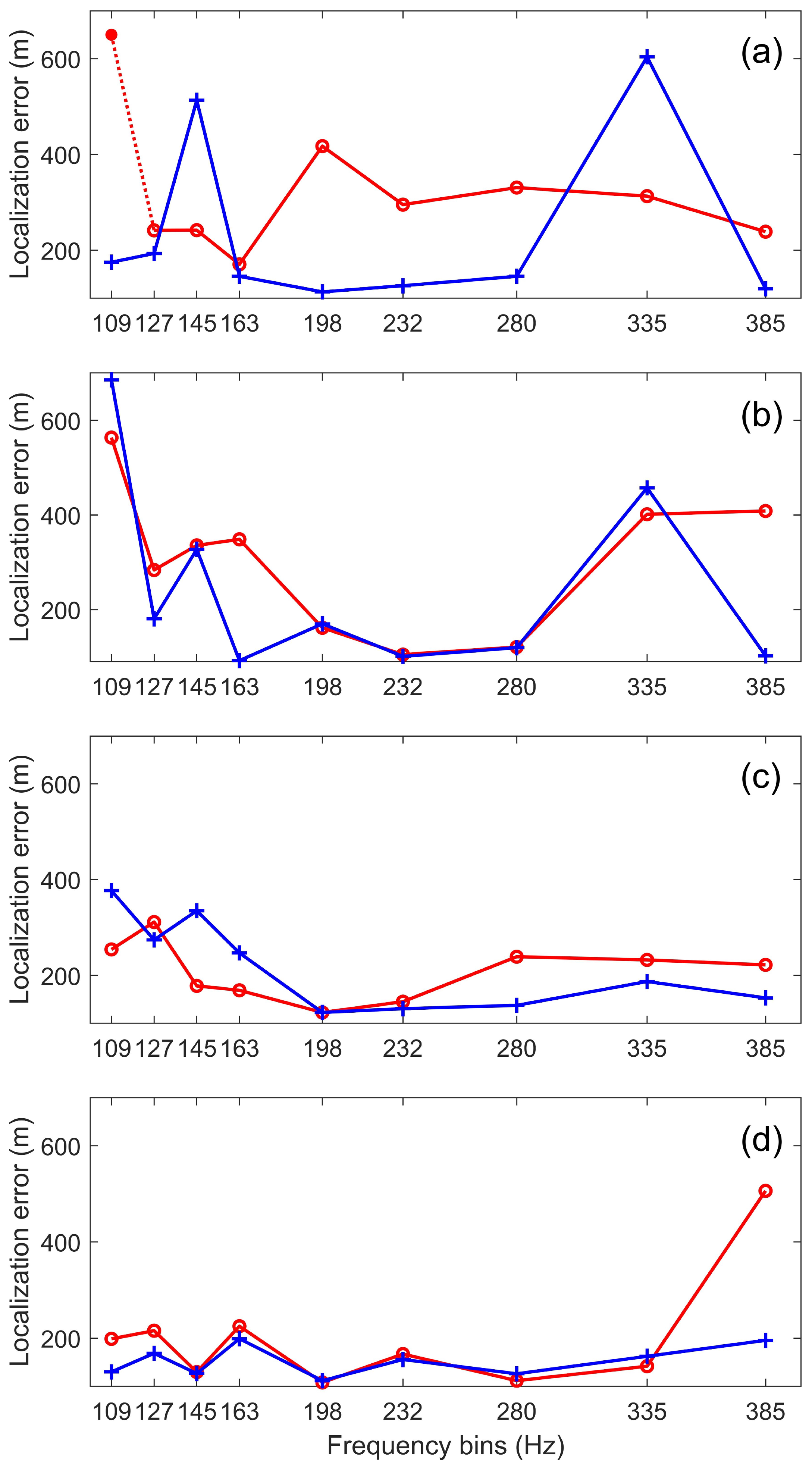
3.1. Section 1: Line Formation
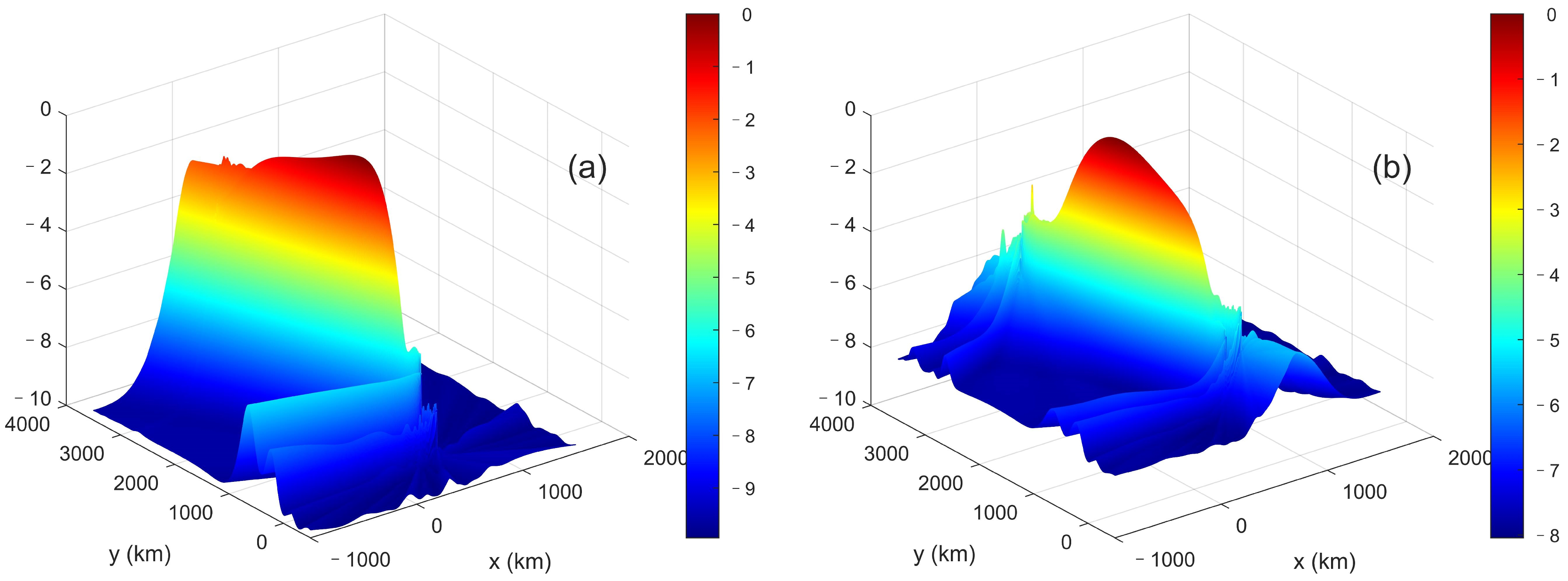
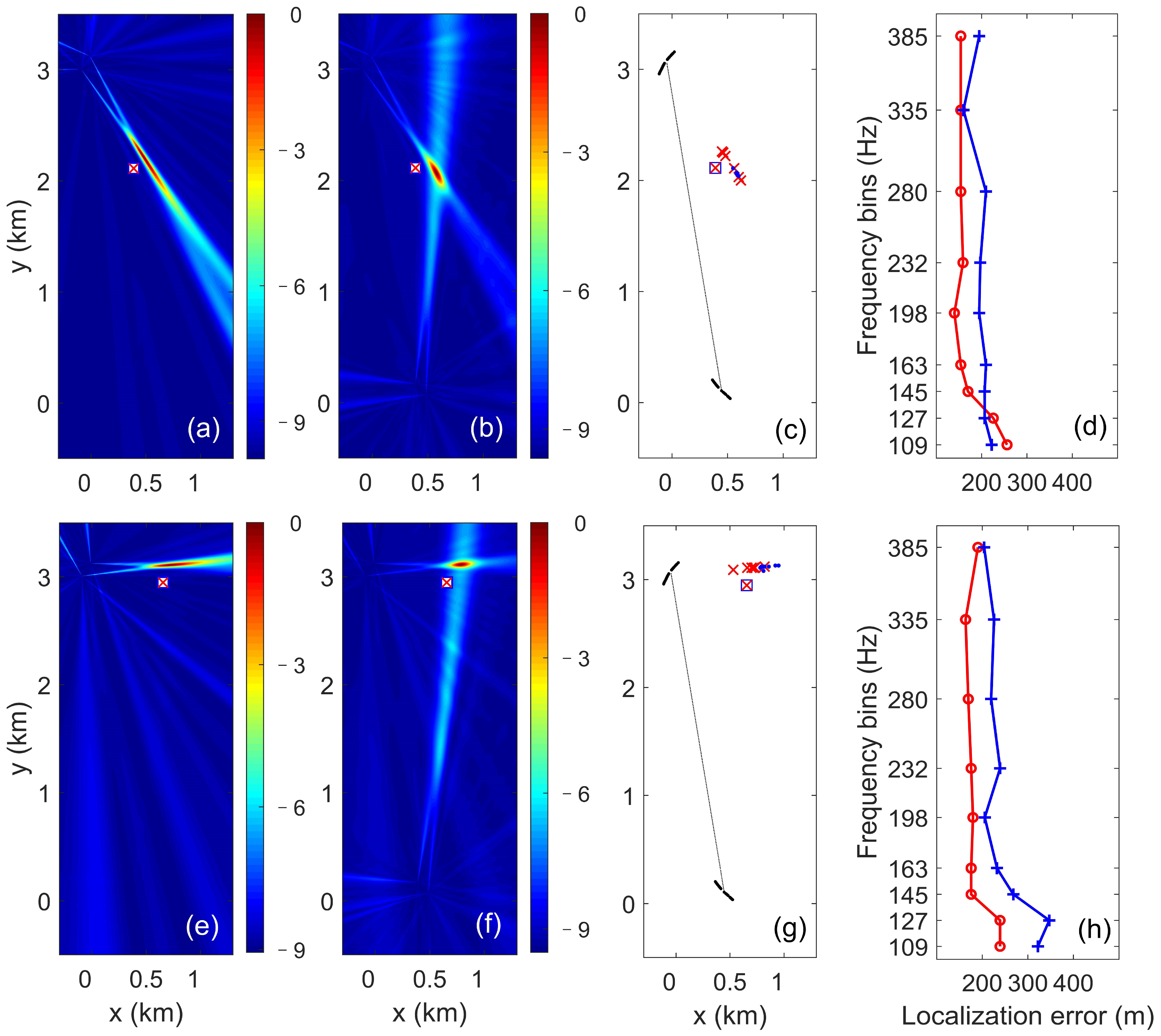
3.2. Section 2: Near-Broadside Formation
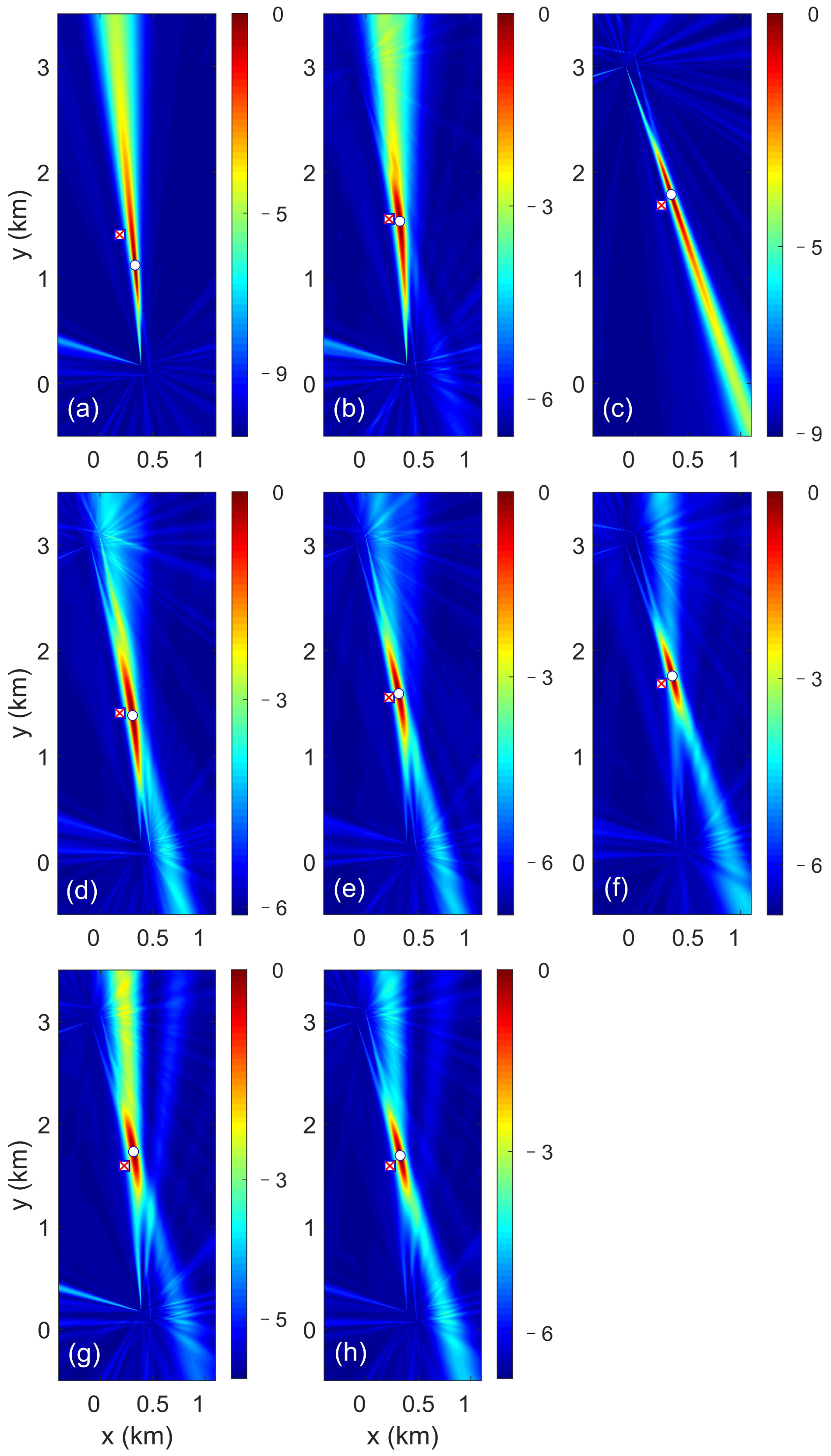
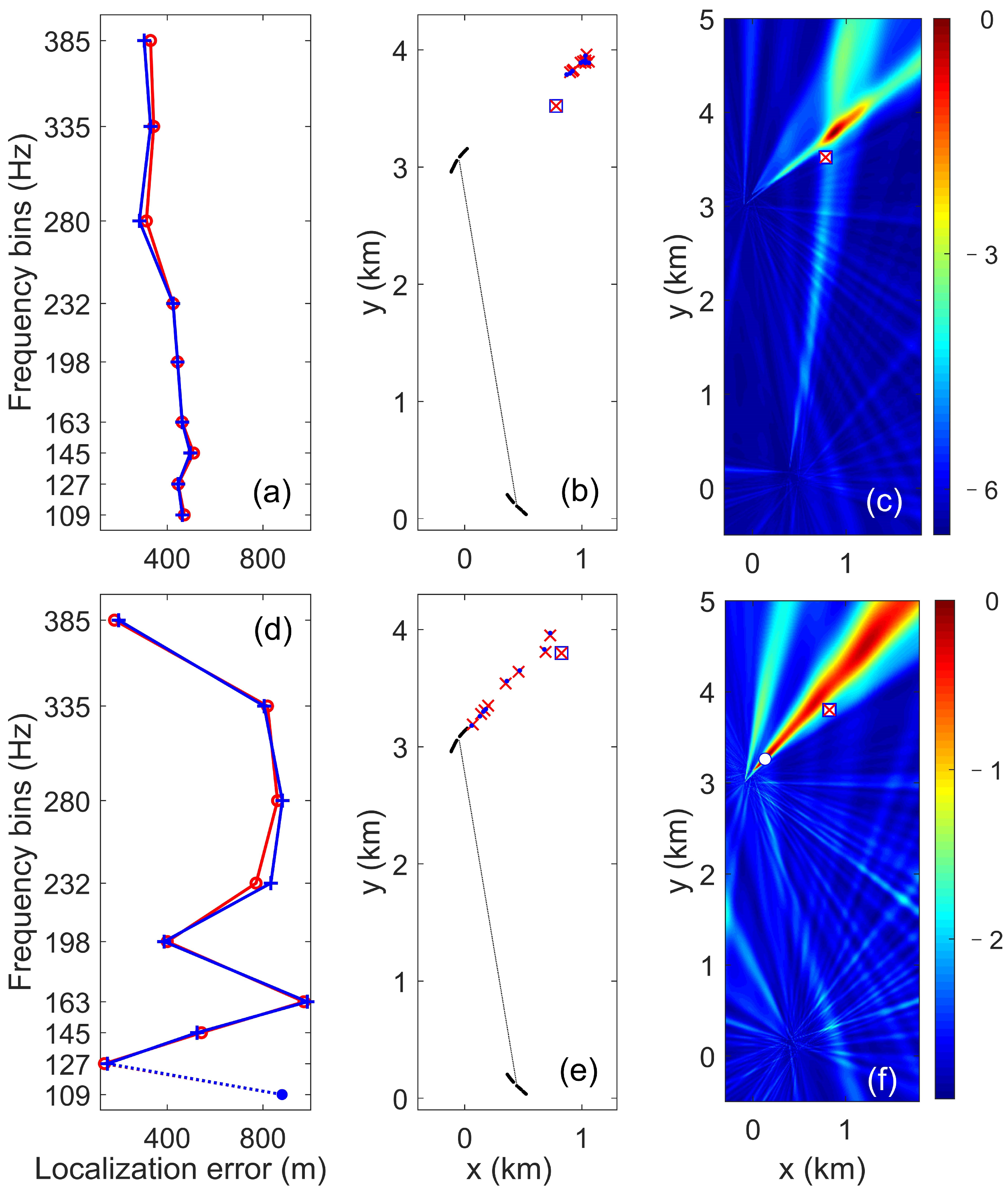
3.3. Section 3: Near-Endfire Formation
3.4. Comparison between DPD and MFP
4. Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nguyen, N.H.; Dogancay, K. Closed-Form Algebraic Solutions for Angle-of-Arrival Source Localization With Bayesian Priors. IEEE Trans. Wirel. Commun. 2019, 18, 3827–3842. [Google Scholar] [CrossRef]
- Wang, G.; Ho, K.C. Convex Relaxation Methods for Unified Near-Field and Far-Field TDOA-Based Localization. IEEE Trans. Wirel. Commun. 2019, 18, 2346–2360. [Google Scholar] [CrossRef]
- Wang, D.; Yin, J.; Zhang, T.; Jia, C.; Wei, F. Iterative constrained weighted least squares estimator for TDOA and FDOA positioning of multiple disjoint sources in the presence of sensor position and velocity uncertainties. Digit. Signal Process. 2019, 92, 179–205. [Google Scholar] [CrossRef]
- Weiss, A.J. Direct position determination of narrowband radio frequency transmitters. IEEE Signal Process. Lett. 2004, 11, 513–516. [Google Scholar] [CrossRef]
- Weiss, A.J.; Alon, A. Direct Position Determination of Multiple Radio Signals. EURASIP J. Adv. Signal Process. 2005, 2005, 37–49. [Google Scholar]
- Weiss, A.J.; Alon, A. A decoupled algorithm for geolocation of multiple emitters. Signal Process. 2007, 87, 2348–2359. [Google Scholar]
- Tirer, T.; Weiss, A.J. High Resolution Direct Position Determination of Radio Frequency Sources. IEEE Signal Process. Lett. 2016, 23, 192–196. [Google Scholar] [CrossRef]
- Tzafri, L.; Weiss, A.J. High-Resolution Direct Position Determination Using MVDR. IEEE Trans. Wirel. Commun. 2016, 15, 6449–6461. [Google Scholar] [CrossRef]
- Bosse, J.; Ferréol, A.; Germond, C.; Larzabal, P. Passive geolocalization of radio transmitters: Algorithm and performance in narrowband context. Signal Process. 2012, 92, 841–852. [Google Scholar] [CrossRef]
- Bosse, J.; Ferréol, A.; Larzabal, P. A Spatio-Temporal Array Processing for Passive Localization of Radio Transmitters. IEEE Trans. Signal Process. 2013, 61, 5485–5494. [Google Scholar] [CrossRef]
- Bishop, A.; Fidan, B.; Anderson, B.; Doğançay, K.; Pathirana, P. Optimality analysis of sensor-target localization geometries. Automatica 2010, 46, 479–492. [Google Scholar] [CrossRef]
- Moreno-Salinas, D.; Pascoal, A.; Aranda, J. Optimal Sensor Placement for Acoustic Underwater Target Positioning With Range-Only Measurements. IEEE J. Ocean. Eng. 2016, 41, 620–643. [Google Scholar] [CrossRef]
- Xu, S.; Doğançay, K. Optimal Sensor Placement for 3-D Angle-of-Arrival Target Localization. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1196–1211. [Google Scholar] [CrossRef]
- Wax, M.; Kailath, T. Decentralized processing in sensor arrays. IEEE Trans. Acoust. Speech Signal Process. 1985, 33, 1123–1129. [Google Scholar] [CrossRef]
- Wang, L.; Yang, Y.; Liu, X. A distributed subband valley fusion (DSVF) method for low frequency broadband target localization. J. Acoust. Soc. Am. 2018, 143, 2269–2278. [Google Scholar] [CrossRef]
- Wang, L.; Yang, Y.; Liu, X. A Direct Position Determination Approach for Underwater Acoustic Sensor Networks. IEEE Trans. Veh. Technol. 2020, 69, 13033–13044. [Google Scholar] [CrossRef]
- Rieken, D.W.; Fuhrmann, D.R. Generalizing MUSIC and MVDR for multiple noncoherent arrays. IEEE Trans. Signal Process. 2004, 52, 2396–2406. [Google Scholar] [CrossRef]
- Wang, L.; Yang, Y.; Liu, X. A cluster-based direct source localization approach for large-aperture horizontal line arrays. J. Acoust. Soc. Am. 2020, 147, EL50–EL54. [Google Scholar] [CrossRef] [Green Version]
- Booth, N.O.; Hodgkiss, W.S.; Ensberg, D.E. SWellEx-96 Experiment Acoustic Data, UC San Diego Library Digital Collections. 2015. Available online: https://library.ucsd.edu/dc/collection/bb3312136z (accessed on 18 September 2019).
- Krim, H.; Viberg, M. Two decades of array signal processing research: The parametric approach. IEEE Signal Process. Mag. 1996, 13, 67–94. [Google Scholar] [CrossRef]
- Wilson, J.H.; Veenhuis, R.S. Shallow water beamforming with small aperture, horizontal, towed arrays. J. Acoust. Soc. Am. 1997, 101, 384–394. [Google Scholar] [CrossRef]
- Tollefsen, D.; Dosso, S.E. Source Localization With Multiple Hydrophone Arrays via Matched-Field Processing. IEEE J. Ocean. Eng. 2017, 42, 654–662. [Google Scholar] [CrossRef]
- Tollefsen, D.; Gerstoft, P.; Hodgkiss, W.S. Multiple-array passive acoustic source localization in shallow water. J. Acoust. Soc. Am. 2017, 141, 1501–1513. [Google Scholar] [CrossRef] [PubMed]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Gantmacher, F. Matrix Theory; American Mathematical Society: Providence, RI, USA, 1959; Volume I-II. [Google Scholar]
- Ferreol, A.; Boyer, E.; Larzabal, P. Low-cost algorithm for some bearing estimation methods in presence of separable nuisance parameters. Electron. Lett. 2004, 40, 966–967. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Formation Type | Coherent Bearing Information | Non-Coherent Bearing Information |
|---|---|---|
| Line formation | Close array domination | Large intersection area |
| Stationary localization results | Random localization results | |
| Near broadside | Close array domination | Close array domination |
| Stationary localization results | Stationary localization results | |
| Higher localization accuracy | Lower localization accuracy | |
| Near end-fire | Close array domination | Multiple intersection area |
| Stationary localization results | Dispersive localization results |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Fang, S.; Yang, Y.; Liu, X. Experimental Study on the Target–Receiver Formation Problem with the Exploitation of Coherent and Non-Coherent Bearing Information. J. Mar. Sci. Eng. 2022, 10, 1922. https://doi.org/10.3390/jmse10121922
Wang L, Fang S, Yang Y, Liu X. Experimental Study on the Target–Receiver Formation Problem with the Exploitation of Coherent and Non-Coherent Bearing Information. Journal of Marine Science and Engineering. 2022; 10(12):1922. https://doi.org/10.3390/jmse10121922
Chicago/Turabian StyleWang, Lu, Shiliang Fang, Yixin Yang, and Xionghou Liu. 2022. "Experimental Study on the Target–Receiver Formation Problem with the Exploitation of Coherent and Non-Coherent Bearing Information" Journal of Marine Science and Engineering 10, no. 12: 1922. https://doi.org/10.3390/jmse10121922