
Guidance-Based Path Following of an Underactuated Ship Based on Event-Triggered Sliding Mode Control

Abstract
:1. Introduction
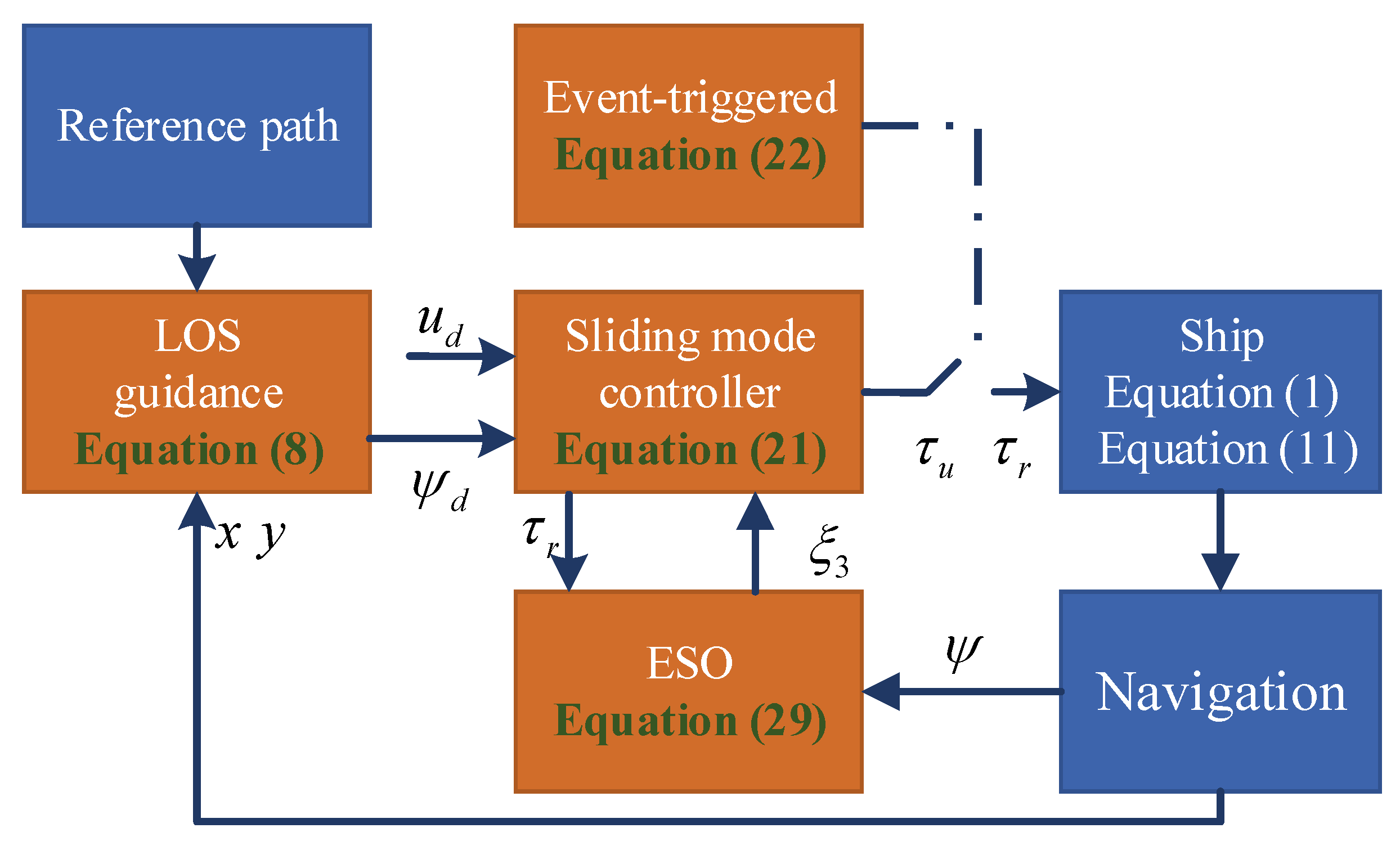
- The parameterized LOS guidance law is employed to lower dimensions of control outputs; then, the LOS guidance law is incorporated with the sliding mode method, where path following of the underactuated ship can be achieved through the heading control.
- The event-triggered strategy can effectively reduce the trigger times. Once the trigger conditions meet the requirements, the control action will be activated immediately, leading to a practical and efficient guidance-based sliding mode controller for the underactuated ship’s path following.
- Unknown dynamics of ship motion is augmented as an extra state, and the extended state observer is included to handle it herein. Finally, an event-triggered-based sliding mode controller with ESO is presented for the path following of the underactuated ship herein.
2. Preliminaries and Problem Formulation
2.1. Kinematics
2.2. Kinetics
2.3. Problem Formulation
3. Controller Design
3.1. Sliding Mode Design
3.2. Event-Triggering Design
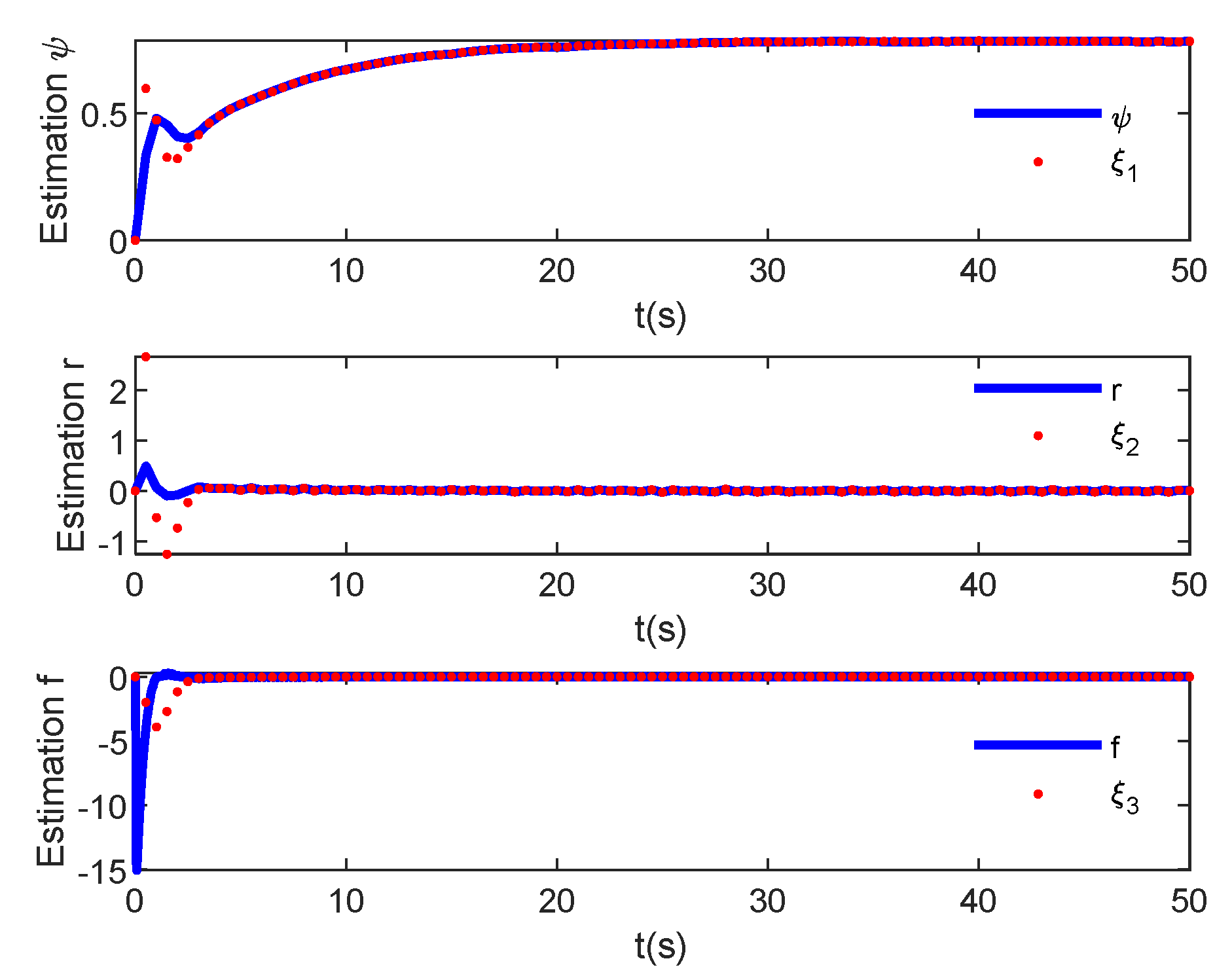
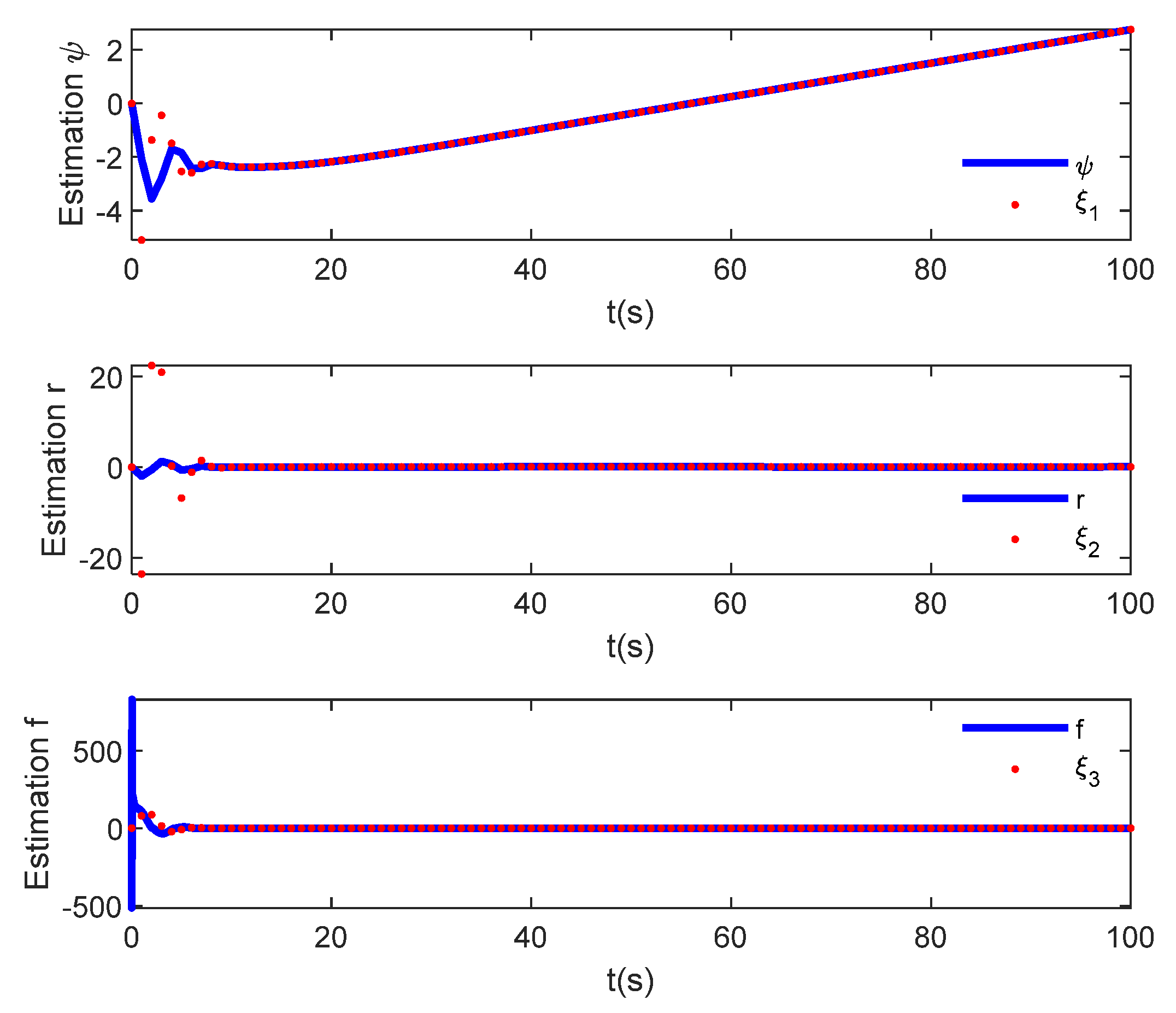
3.3. Extended State Observer
4. Simulation Results
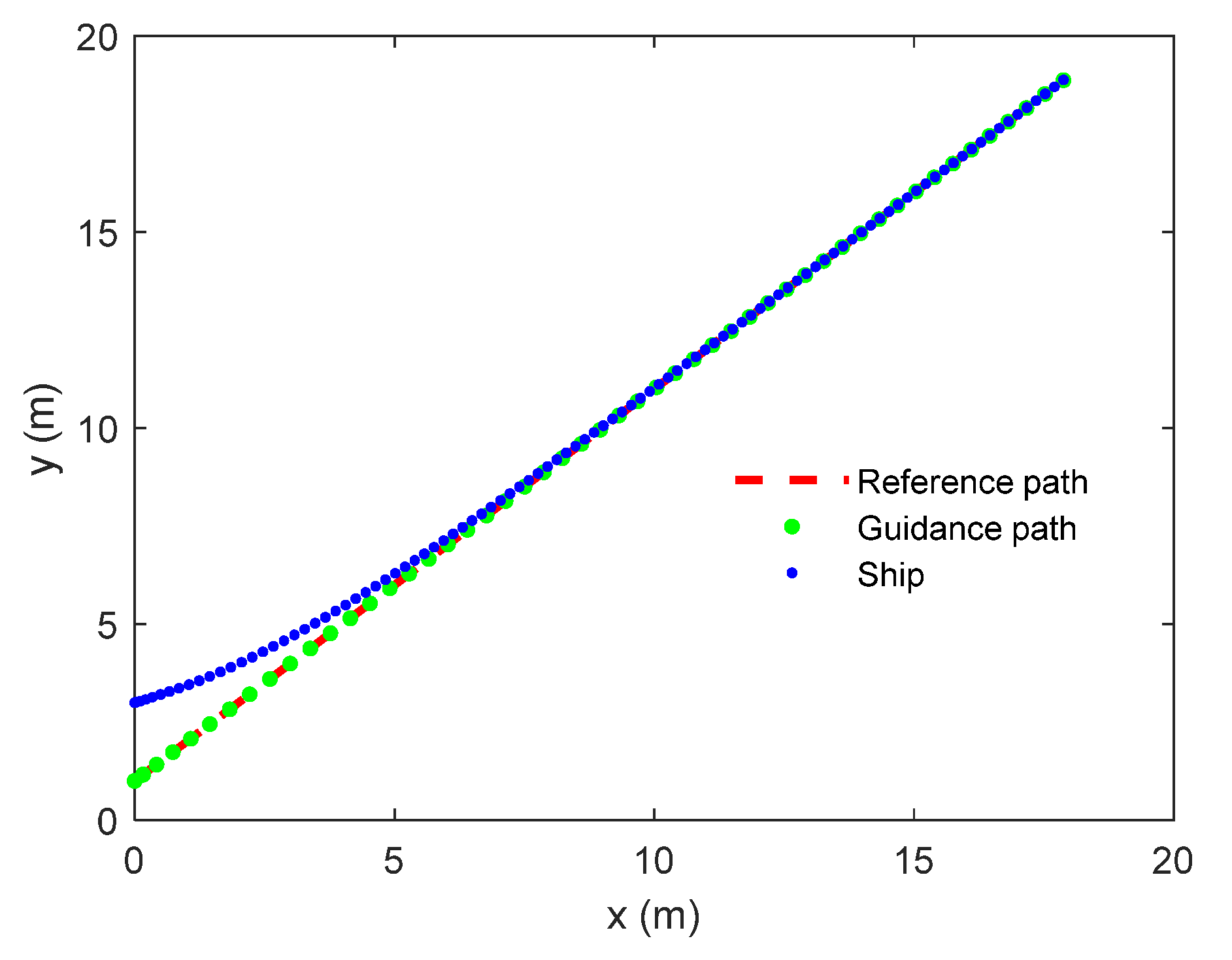
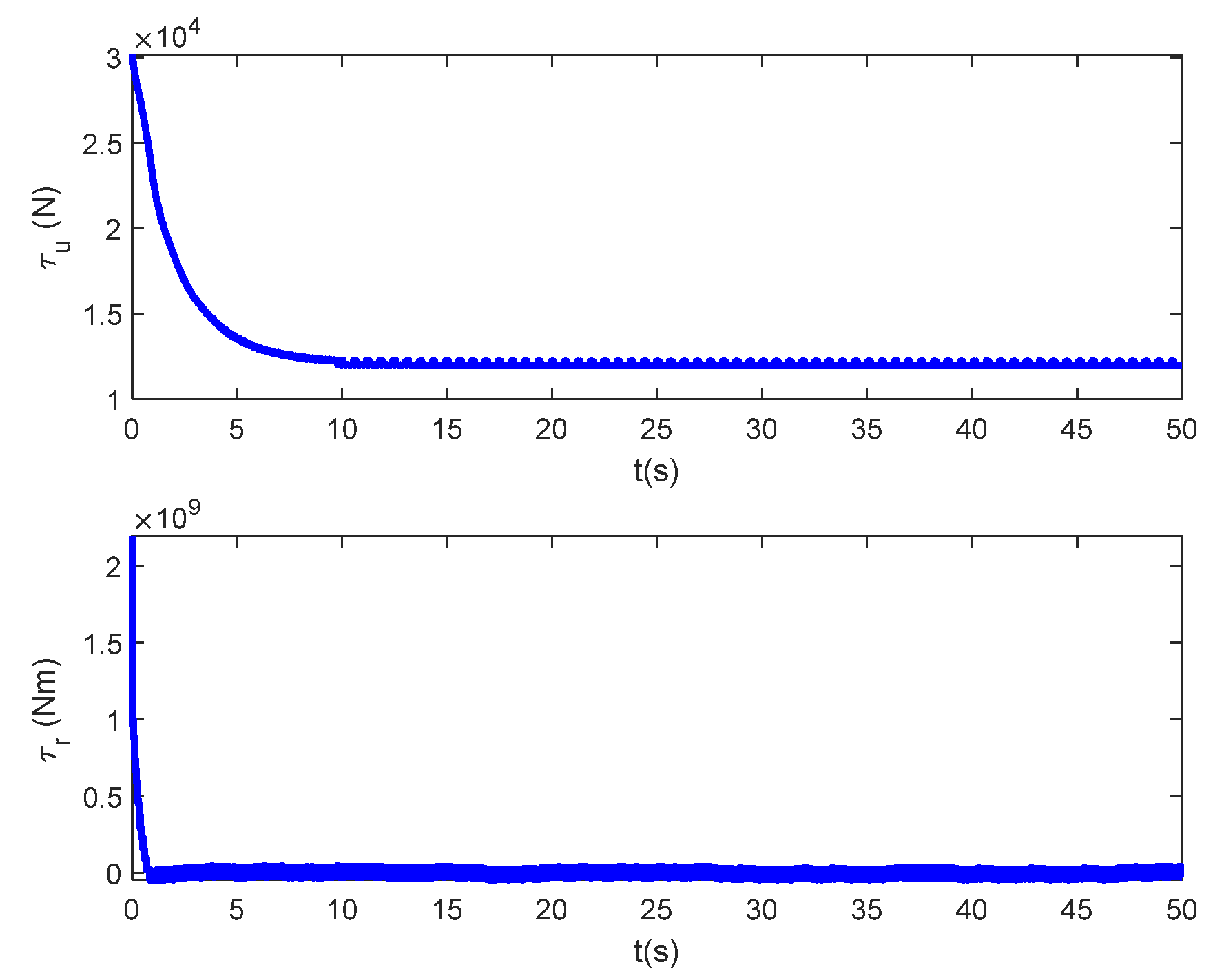
4.1. Straight Path Following
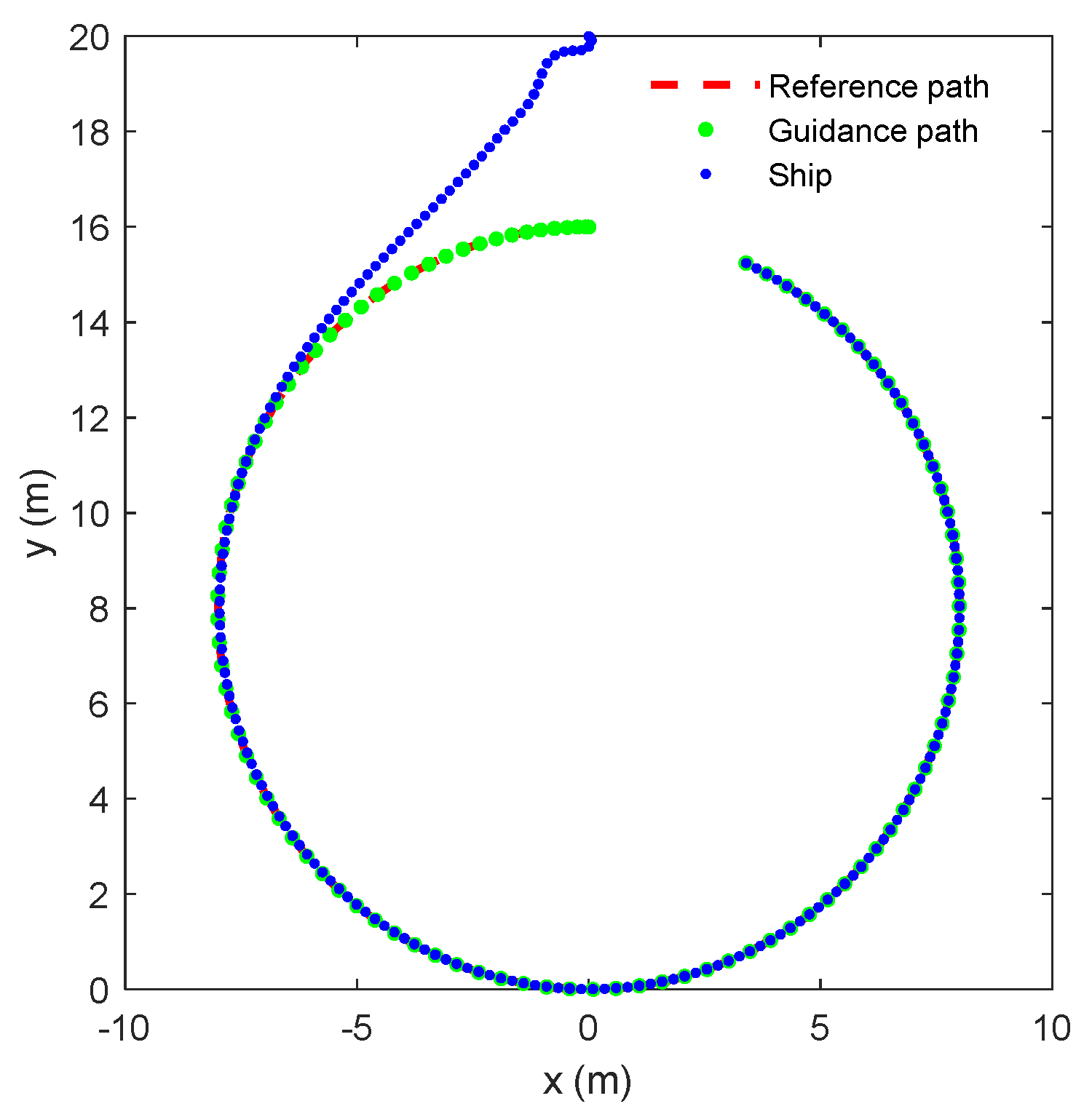
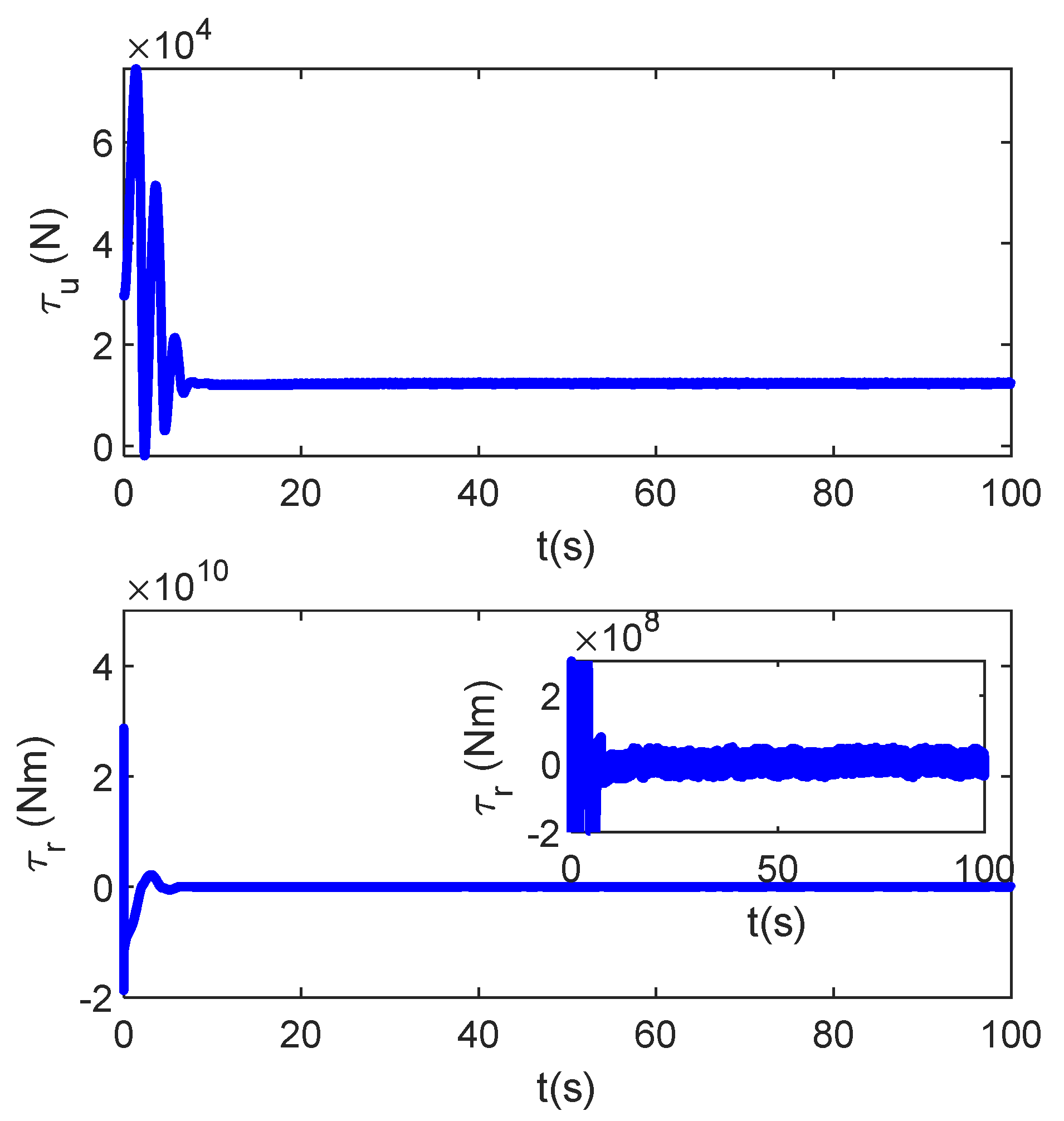
4.2. Curved Path Following
4.3. Comparative Study
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhu, G.; Du, J. Global Robust Adaptive Trajectory Tracking Control for Surface Ships Under Input Saturation. IEEE J. Ocean. Eng. 2018, 45, 442–450. [Google Scholar] [CrossRef]
- Du, J.; Yang, Y.; Wang, D.; Guo, C. A robust adaptive neural networks controller for maritime dynamic positioning system. Neurocomputing 2013, 110, 128–136. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, H.; Li, M.; Wang, D.; Fu, M. Adaptive fuzzy controller design for dynamic positioning ship integrating prescribed performance. Ocean Eng. 2021, 219, 107956. [Google Scholar] [CrossRef]
- Du, J.; Hu, X.; Liu, H.; Chen, C.L.P. Adaptive Robust Output Feedback Control for a Marine Dynamic Positioning System Based on a High-Gain Observer. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 2775–2786. [Google Scholar] [CrossRef] [PubMed]
- Wang, N.; Gao, Y.; Yang, C.; Zhang, X.F. Reinforcement learning-based finite-time tracking control for an unknown unmanned surface vehicle with input constraints. Neurocomputing 2022, 484, 26–37. [Google Scholar] [CrossRef]
- Do, K. Global robust adaptive path-tracking control of underactuated ships under stochastic disturbances. Ocean Eng. 2016, 111, 267–278. [Google Scholar] [CrossRef]
- Wang, N.; Su, S.-F.; Pan, X.; Yu, X.; Xie, G. Yaw-Guided Trajectory Tracking Control of an Asymmetric Underactuated Surface Vehicle. IEEE Trans. Ind. Inform. 2018, 15, 3502–3513. [Google Scholar] [CrossRef]
- Wang, N.; Ahn, C.K. Hyperbolic-tangent LOS guidance-based finite-time path following of underactuated marine vehicles. IEEE Trans. Ind. Electron. 2020, 67, 8566–8575. [Google Scholar] [CrossRef]
- Zhao, B.; Zhang, X.; Liang, C. A novel path-following control algorithm for surface vessels based on global course constraints and nonlinear feedback technology. Appl. Ocean Res. 2021, 111, 102635. [Google Scholar] [CrossRef]
- Zhang, G.Q.; Zhang, C.L.; Yang, T.T.; Zhang, W.D. Disturbance observer-based composite neural learning path following control of underactuated ships subject to input saturation. Ocean Eng. 2020, 216, 108033. [Google Scholar] [CrossRef]
- Liu, Z. Improved ELOS based path following control for underactuated surface vessels with roll constraints. Ocean Eng. 2022, 245, 110348. [Google Scholar] [CrossRef]
- Lefeber, E.; Pettersen, K.; Nijmeijer, H. Tracking control of an underactuated ship. IEEE Trans. Control Syst. Technol. 2003, 11, 52–61. [Google Scholar] [CrossRef] [Green Version]
- Do, K.; Jiang, Z.; Pan, J. Underactuated ship global tracking under relaxed conditions. IEEE Trans. Autom. Control 2002, 47, 1529–1536. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; Wiley: London, UK, 2011. [Google Scholar]
- Zhang, C.L.; Zhang, G.Q.; Zhang, X.K. DVSL guidance-based composite neural path following control for underactuated cable-laying vessels using event-triggered inputs. Ocean Eng. 2021, 238, 109713. [Google Scholar] [CrossRef]
- Breivik, M.; Fossen, T.I. Principles of guidance-based path following in 2D and 3D. In Proceedings of the 44th IEEE Conference on Decision and Control, and the European Control Conference, Seville, Spain, 12–15 December 2005. [Google Scholar]
- Fossen, T.I.; Breivik, M.; Skjetne, R. Line-of-sight path following of underactuated marine craft. In Proceedings of the IFAC Manoeuvring and Control of Marine Craft, Girona, Spain, 17–19 September 2003. [Google Scholar]
- Fossen, T.I.; Pettersen, K.Y.; Galeazzi, R. Line-of-sight path following for Dubins paths with adaptive sideslip compensation of drift forces. IEEE Trans. Control Syst. Technol. 2015, 23, 820–827. [Google Scholar] [CrossRef] [Green Version]
- Deng, Y.J.; Zhang, X.K.; Zhang, G.Q. Line-of-sight-based guidance and adaptive neural path-following control for sailboats. IEEE J. Ocean. Eng. 2020, 45, 1177–1188. [Google Scholar] [CrossRef]
- Liu, C.; Wang, D.; Zhang, Y.; Meng, X. Model predictive control for path following and roll stabilization of marine vessels based on neurodynamic optimization. Ocean Eng. 2020, 217, 107524. [Google Scholar] [CrossRef]
- Liu, L.; Wang, D.; Peng, Z. Path following of marine surface vehicles with dynamical uncertainty and time-varying ocean disturbances. Neurocomputing 2016, 173, 799–808. [Google Scholar] [CrossRef]
- Liu, L.; Wang, D.; Peng, Z. ESO-Based Line-of-Sight Guidance Law for Path Following of Underactuated Marine Surface Vehicles With Exact Sideslip Compensation. IEEE J. Ocean. Eng. 2016, 42, 477–487. [Google Scholar] [CrossRef]
- Liu, C.; Philip Chen, C.L.; Zou, Z.J.; Li, T.S. Adaptive NN-DSC control design for path following of underactuated surface vessels with input saturation. Neurocomputing 2017, 267, 466–474. [Google Scholar] [CrossRef]
- Yu, Y.; Guo, C.; Yu, H. Finite-Time PLOS-Based Integral Sliding-Mode Adaptive Neural Path Following for Unmanned Surface Vessels with Unknown Dynamics and Disturbances. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1500–1511. [Google Scholar] [CrossRef]
- Tabuada, P. Event-Triggered Real-Time Scheduling of Stabilizing Control Tasks. IEEE Trans. Autom. Control 2007, 52, 1680–1685. [Google Scholar] [CrossRef] [Green Version]
- Xing, L.; Wen, C.Y.; Liu, Z.T.; Su, H.Y.; Cai, J.P. Event-triggered adaptive control for a class of uncertain nonlinear systems. IEEE Trans. Autom. Control 2017, 62, 2071–2076. [Google Scholar] [CrossRef]
- Wang, A.; Liu, L.; Qiu, J.; Feng, G. Event-Triggered Robust Adaptive Fuzzy Control for a Class of Nonlinear Systems. IEEE Trans. Fuzzy Syst. 2018, 27, 1648–1658. [Google Scholar] [CrossRef]
- Wang, L.; Chen, C.L.P.; Li, H. Event-Triggered Adaptive Control of Saturated Nonlinear Systems With Time-Varying Partial State Constraints. IEEE Trans. Cybern. 2018, 50, 1485–1497. [Google Scholar] [CrossRef]
- Huang, C.; Zhang, X.; Zhang, G. Decentralized event-triggered cooperative path-following control for multiple autonomous surface vessels under actuator failures. Appl. Ocean Res. 2021, 113, 102751. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Zhang, X.; Zhang, W. Event-triggered robust adaptive control for path following of the URS in presence of the marine practice. Ocean Eng. 2021, 242, 110139. [Google Scholar] [CrossRef]
- Gao, Z. Active disturbance rejection control: A paradigm shift in feedback control system design. In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006. [Google Scholar]
- Yan, W.; Wang, L.F.; Zhang, J.Z.; Li, F. Path following control of autonomous ground vehicle based on nonsingular terminal sliding mode and active disturbance. IEEE Trans. Veh. Technol. 2019, 68, 6379–6390. [Google Scholar]
- Zhang, G.; Zhang, C.; Zhang, X.; Deng, Y. ESO-based path following control for underactuated vehicles with the safety prediction obstacle avoidance mechanism. Ocean Eng. 2019, 188, 106259. [Google Scholar] [CrossRef]
- Ye, J.; Roy, S.; Godjevac, M.; Baldi, S. A Switching Control Perspective on the Offshore Construction Scenario of Heavy-Lift Vessels. IEEE Trans. Control Syst. Technol. 2021, 29, 470–477. [Google Scholar] [CrossRef]
- Ye, J.; Roy, S.; Godjevac, M. Robustifying Dynamic Positioning of Crane Vessels for Heavy Lifting Operation. IEEE/CAA J. Autom. Sin. 2021, 8, 753–765. [Google Scholar] [CrossRef]
- Ye, J.; Roy, S.; Godjevac, M.; Baldi, S. Observer-based Robust Control for Dynamic Positioning of Large-Scale Heavy Lift Vessels. IFAC-Pap. Line 2019, 52, 138–143. [Google Scholar] [CrossRef]
- Roy, S.; Baldi, S.; Ioannou, P.A. An Adaptive Control Framework for Underactuated Switched Euler–Lagrange Systems. IEEE Trans. Autom. Control 2022, 67, 4202–4209. [Google Scholar] [CrossRef]
- Do, D.; Jiang, Z.; Pan, J. Robust adaptive path following of underactuated ships. Automatica 2004, 40, 929–944. [Google Scholar] [CrossRef]
- Young, K.D.; Utkin, V.I.; Zguner, U.O. A control engineer’s guide to sliding mode control. IEEE Trans. Control Syst. Technol. 1999, 7, 328–342. [Google Scholar] [CrossRef]
- Ren, B.; San, P.P.; Ge, S.S.; Lee, T.H. Adaptive dynamic surface control for a class of strict-feedback nonlinear systems with unknown backlash-like hysteresis. In Proceedings of the 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009; pp. 4482–4487. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Triggering Times | Sliding Mode Controller | Even-Triggered Sliding Mode Controller |
|---|---|---|
| Straight path following | 5000 | 491 |
| Curved path following | 10,000 | 1106 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Liu, Y. Guidance-Based Path Following of an Underactuated Ship Based on Event-Triggered Sliding Mode Control. J. Mar. Sci. Eng. 2022, 10, 1780. https://doi.org/10.3390/jmse10111780
Zhang Y, Liu Y. Guidance-Based Path Following of an Underactuated Ship Based on Event-Triggered Sliding Mode Control. Journal of Marine Science and Engineering. 2022; 10(11):1780. https://doi.org/10.3390/jmse10111780
Chicago/Turabian StyleZhang, Yuxi, and Yong Liu. 2022. "Guidance-Based Path Following of an Underactuated Ship Based on Event-Triggered Sliding Mode Control" Journal of Marine Science and Engineering 10, no. 11: 1780. https://doi.org/10.3390/jmse10111780