1. Introduction
Ship electric propulsion systems have grown significantly over the last century, but at present advanced new energy ship propulsion technologies require lower pollutant emissions from ships [
1]. Clean energy (fuel cells, photovoltaic power generation, wind power generation), advanced control technology, and power energy management technology are being introduced into ship power systems [
2,
3,
4]. As these technologies develop and change, future marine power systems are expected to include generator sets and other alternative power sources with different characteristics. Therefore, electric propulsion systems will become multi-energy complementary, and new hybrid-energy ship propulsion systems will be built to meet the new demands [
5,
6,
7].
Mixing the two types of energy storage systems, Fang, S., et al., proposed a two-step multi-objective optimization method for optimizing the management of all-electric ships, striving to minimize the total operating cost [
8]. In order to optimize the operating cost of diesel generators and energy storage systems, Anvari, M., et al., extended the principles of optimal planning and economic dispatch problems to shipboard systems in order to realize the coordinated power supply of diesel generators and energy storage systems [
9]. Mistress, G., et al., focused on the parameter identification method of the onboard battery storage system electrical model, which solves the energy storage system degradation problem [
10]. Lee, K., et al. realized green ship and low-carbon operation by showing the experimental results of a prototype green ship and achieved the demanding output on the load side with the minimum cost and less volatility [
11]. In order to minimize fuel consumption and verify the feasibility of its scheme through simulation, Accetta et al. proposed an energy management system for the electrical system of yachts [
12], but most of the existing research focuses on optimizing energy storage. Energy systems and controllers ignore the overall scheduling of power system energy. In addition, previous work has rarely noted that for the hybrid propulsion systems of photovoltaic power generation systems, wind turbines, and diesel generators. It is necessary to carry out the maximum power point tracking control of wind and photovoltaic power generation systems and the system connection of distributed power sources.
Hybrid electric ships are generally designed to improve energy utilization: Brizuela-Mendoza, J.A., et al. [
13] analyzed in detail the efficiency of a ship’s DC hybrid power system, constructed an optimization strategy aiming at improving energy efficiency, and provided the optimal on-load operating point of the generator set. Zhu, L., et al. [
14] proposed an energy management strategy based on fuzzy logic for a hybrid ship that uses fuel cells, batteries, and supercapacitors as energy sources, aiming to optimize the power distribution among generating units and optimize the performance and fuel economy of the hybrid system.
Fully electric ships in the military field, equipped with sophisticated electronic instruments, require high power quality and fault handling capabilities: Feng, X., et al. [
15] proposed a multi-agent system coordination controller for the Marine MVAC power system, which can balance load and power generation in real-time while meeting system operation constraints while considering load priority and reducing the influence of pulse load on power quality by coordinating pulse load and propulsion load. Seenumani, G., et al. [
16] proposed a hierarchical control method to meet the real-time requirements, aiming at the power failure problem of all-electric ships for military applications. The top-level controller realized the suboptimal power decomposition of batteries and online power supply to meet the system power demand, while the local controller regulated the power command of each independent power supply. Nelson, M., et al. [
17] proposed the use of graph theory to provide complete autonomous control for the power system when the power system fails or the ship task changes.
There are also some energy management strategies for specific needs: Mensah, E., et al. [
18] built a model for the design of energy management systems for simulation and including system reconfiguration and load shedding functions, allowing the simulation and analysis of power systems with discrete events. Hou, J., et al. [
19] evaluated the interaction of multiple power sources in the ship electric propulsion system with a hybrid energy storage system on the basis of model analysis and revealed the important role of system-level energy management strategy. Kanellos, F. D., et al. [
20] proposed an optimization method of load-side management and power generation planning, in which the load-side management is realized by adjusting the power consumption of the propulsion motor and the dynamic programming algorithm is used to solve the optimization problem according to the constraints of ship operation and environment, so as to ensure the operation mode with minimum cost. López, A. R., et al. [
21] proposed the adoption of load-shedding technology based on expert system rules in order to control the voltage level of the ship power grid, and the application was verified in a ship power grid. Paran, S., et al. [
22] proposed the energy management of ship DC power system based on model predictive control to ensure reasonable load-sharing among generators while maintaining a stable DC bus voltage.
There have been several identified optimization methods for hybrid schemes, such as the use of artificial intelligence, as the appropriate way to enhance the optimization process. Hatata, A. Y., et al. [
23] used clonal selection techniques to optimize hybrid solar and wind power schemes with batteries to utilize their outputs with minimal cost and small volatility. Hadidian, M. J., et al. [
24] used an intelligent pollination algorithm to optimize the power output of a hybrid system (solar/wind/hydrogen) so as to minimize the total operating cost. Sanajaoba Singh, S., et al. [
25] analyzed and studied the effectiveness of cuckoo search using a hybrid solar/wind/battery scheme design problem in remote areas of India. De la Cruz, J., et al. [
26] used a well-known heuristic algorithm based on simulated annealing to optimize independent wind power and photovoltaic systems. In another paper, the influence of using predicted load information on the performance of small independent hybrid power was studied [
27]. Maleki, A., et al. [
28] optimized the size of the battery pack, the area of the PV system, and the fuel consumption of the diesel generator in the hybrid system to minimize the cycle operation cost of the system and used a heuristic algorithm based on tabu search. These hybrid methods provide a new way for microgrid optimization and show certain advantages and application prospects.
In the master–slave control, one of the distributed power supply (or energy storage unit) controllers is selected as the master controller, and the others are used as the slave controllers. In this mode, the distributed power supply of the main control unit needs to track the change of charge, which requires its power output to be controlled within a certain range, and it can also respond quickly to charge fluctuation. In peer-to-peer control, all distributed power controllers are in the same position [
29]. Therefore, when the power required by the load changes, the distributed power supply can make the microgrid return to a stable state by properly adjusting its voltage and frequency, but its control results have certain deviations.
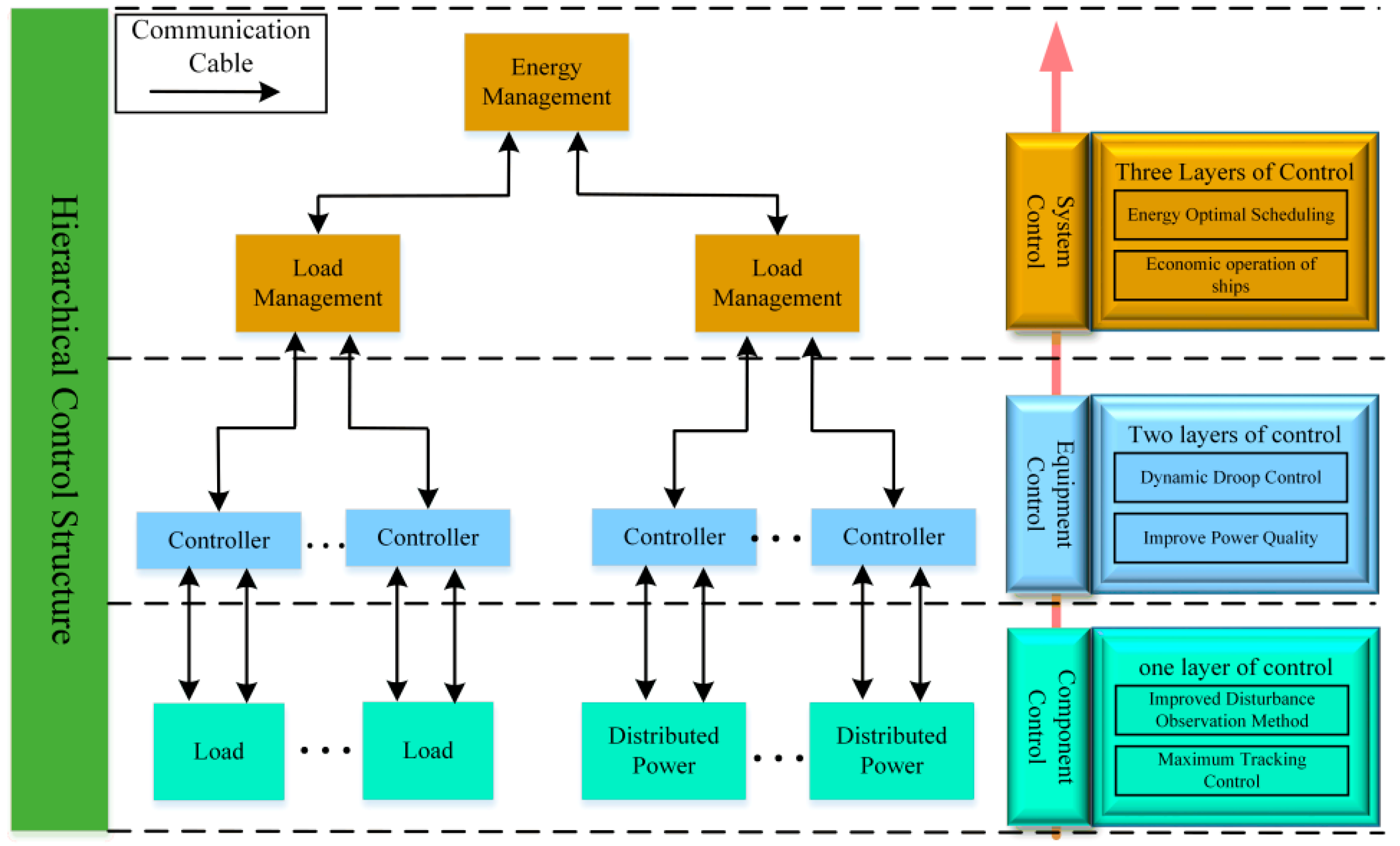
According to the existing research literature, the strategies of paralleling multiple distributed power sources are generally divided into master–slave control and peer-to-peer control. The master–slave control method is simple and easy to implement, mainly relying on high-speed communication units, but the communication cost is high and the system redundancy is poor. The peer-to-peer control in the form of point-to-point, such as droop control, does not require high-bandwidth communication and is easy to implement using the “plug and play” of micro-sources, which meets the needs of the distributed system. Therefore, droop control can be used as an ideal load voltage and frequency control method for the ship propulsion system. There is a conflict between current sharing and voltage regulation due to the virtual impedance introduced by droop control. Additionally, there are problems with the steady-state oscillation phase and deviation from tracking direction. In order to solve the above contradictions, a hierarchical control collaborative optimization strategy for propulsion systems with multiple distributed power sources is proposed.
4. Simulation Verification and Analysis
4.1. Simulation and Verification of MPPT Control Strategy Based on Improved Disturbance Observation Method
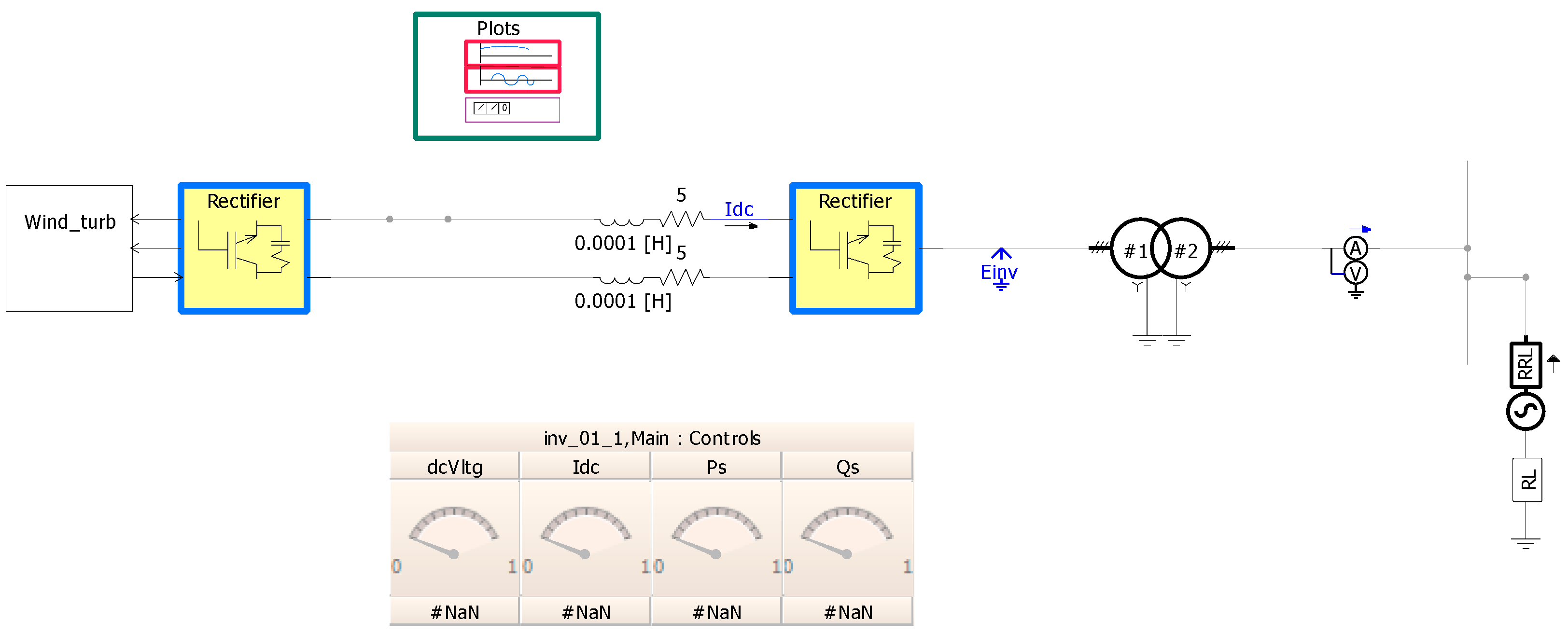
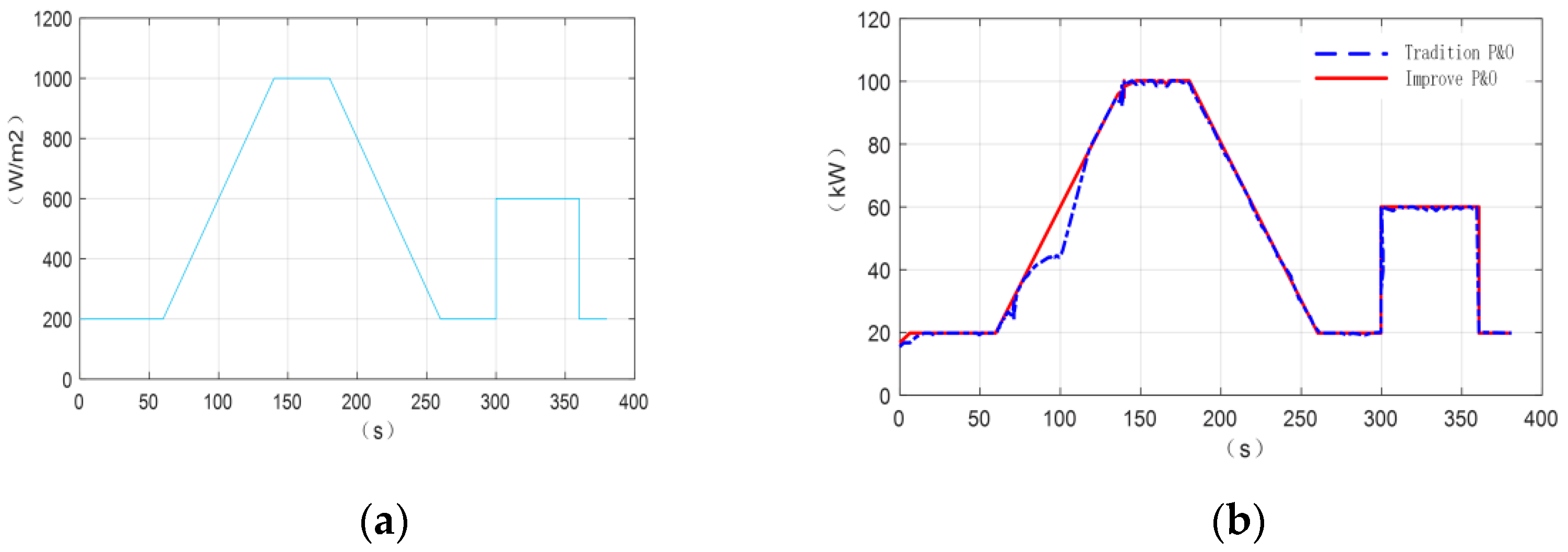
In order to verify the feasibility and effectiveness of the algorithm, a mathematical model of the related system is built in this paper, in which the maximum output power of the wind and photovoltaic power generation systems are 200 kW and 120 kW and the wind speed drive simulates the input wind speed. The MPPT module is used to achieve the maximum wind mechanical power tracking.
The irradiance change curve shown in
Figure 15a is used as the test input signal, and the simulation duration is set to 400 s to verify the effectiveness of the control strategy in dealing with the gradual and sudden change of irradiance.
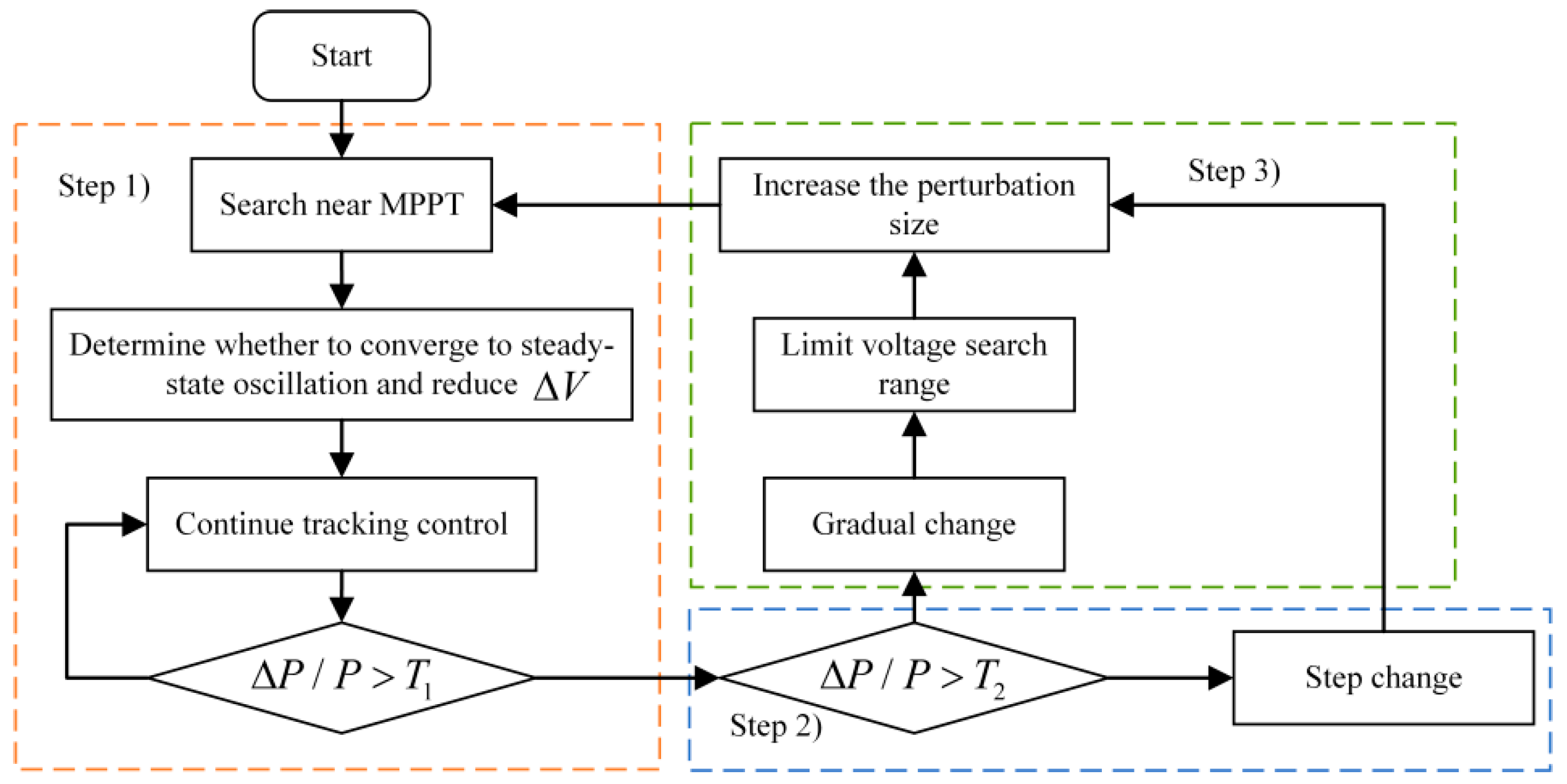
The two curves in the figure are the output power curves of the traditional and improved P&O algorithms, and the voltage disturbance is fixed at 2% of . From the overall simulation results, the improved algorithm only consumes 6.3 s in approaching the maximum power point at the beginning, the oscillation amplitude is relatively small, and the trajectory can be tracked well.
The tracking effects of the two algorithms are shown in
Table 2. It can be seen more intuitively that the tracking time of the improved P&O algorithm is increased by 15.4% compared with the traditional P&O algorithm, and the power loss is reduced by 39.3%. Therefore, the improved P&O algorithm can effectively reduce power loss to achieve the full tracking of the maximum power point, which will improve the efficiency of renewable energy generation.
- 2.
Wind Power System Simulation
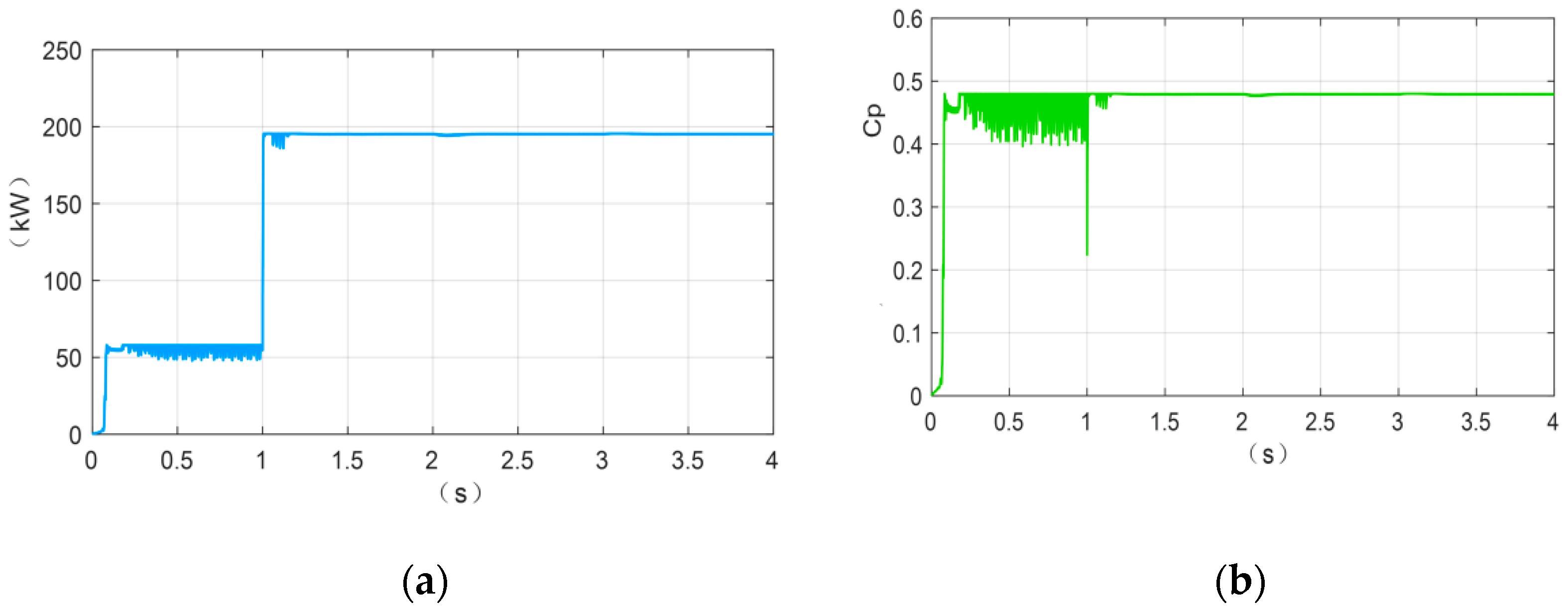
Based on the improved P&O algorithm to verify the performance of the system in dealing with sudden changes in wind speed and in steady state, two main working conditions are set to detect in the simulation verification; step signal detection is working condition one and steady output signal is working condition two. The simulation time is set to 4 s, and the initial wind speed is set to 8 m/s. Entering the step signal detection part at 1 s, the wind speed suddenly changes from 8 m/s to 12 m/s, and then enters the steady-state output part of working condition two.
At the beginning of the simulation, the wind turbine is in the state of starting. Since the wind speed has not stabilized, the power will fluctuate in a small range, but it is still within the controllable range. At 1 s, the system enters the step signal detection stage of working condition one, the wind speed suddenly increases from 8 m/s to 12 m/s, the output power fluctuates slightly, and the output power remains stable at 180 kW. Then enter the steady state stage of working condition two, and the output power curve does not fluctuate.
Figure 16b is the simulation diagram of the wind energy utilization coefficient curve. The transient fluctuation occurs at the time of 1 s. After the dynamic adjustment of the algorithm, it quickly recovers and stabilizes, and finally stabilizes at a maximum value of about 0.48.
4.2. Simulation Verification of Control Strategy Based on the Dynamic Droop Controller
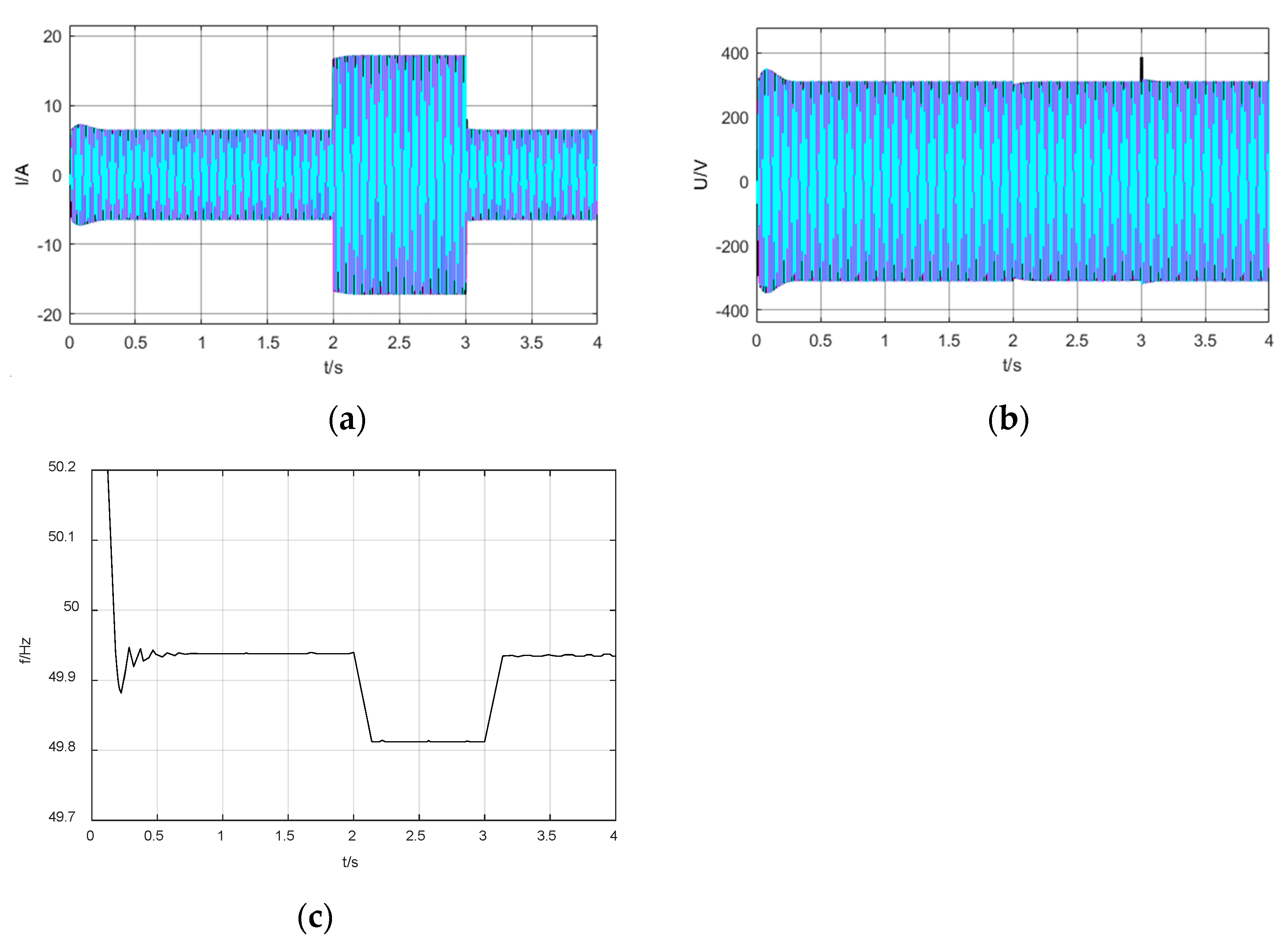
In the system-connected mode of distributed power generation, the process of adding and cutting off the load of the propulsion system is simulated. The simulation time is set to 4 s, and the initial value of the load power is set to 10 kW. The load power suddenly changes from 10 kW to 70 kW in 2 s and then drops back to 10 kW in 3 s, and the system-connected side voltage, current waveform, and frequency fluctuation are detected.
It can be seen from the figure that the output voltage and current are standard sinusoidal waveforms. The system enters a stable state at about 0.2 s, the current amplitude increases to about 16.5 A after a sudden load is applied at 2 s, and the current waveform stabilizes around 16.5 A in 2~3 s;
Figure 17b shows the voltage curve of the system-connected side, which is maintained at around 300 V after the system is stable, and the voltage waveform not change significantly after the load suddenly changes;
Figure 17c displays the frequency change curve when the system is running, where the system frequency can be maintained at around 50 Hz and the load switching process can be realized smoothly and quickly.
It can be seen from the simulation results that the designed two-layer coordinated control strategy of the propulsion system, which is based on the dynamic droop coefficient, has a significant effect on eliminating the voltage and frequency deviation. The system has the characteristics of rapid dynamic response and strong stability.
4.3. Simulation Verification of Day-Ahead Optimal Scheduling Control Strategy
Through the wind and solar forecast data and the electricity consumption of the shipload, the forecast curve of the day-ahead load power and the output power of the renewable energy is given, as shown in
Figure 18.
The day-ahead load power and renewable energy output power are input into system, and the day-ahead optimal dispatch curve and the energy storage system SOC curve can be obtained through the control calculation of each layer, as shown in
Figure 19. It can be seen that the diesel generator set is basically maintained near the minimum operating power, which effectively reduces the pollutants produced by diesel generator sets.
During the period from 0:00 to 5:00, since the light intensity is zero, renewable energy is supplied by the wind power generation part, and through the charge and discharge control of the energy storage system, the output power of the diesel unit is maintained at the minimum operating power of about 100 kW. From 6:00 to 11:00, the first peak period of electricity consumption is ushered in. The load power increases, and the output power of the diesel generator needs to be started to make up for the remaining power required by the load. From 12:00 to 16:00, since the light intensity reaches the highest value, the total output power of renewable energy reaches the maximum. From 17:00 to 21:00, the second peak period of electricity consumption is ushered in. The load power of the ship power system increases. Due to the reduction of the light intensity to zero, the total output power of renewable energy begins to decrease. After 21:00, as the power required by the ship power system load decreases, SOC returns to around 50% and the SOC value remains within the optimal range.
In order to verify the economy of the IPSO algorithm proposed in the optimal scheduling problem in this paper, the day-ahead optimal scheduling strategy of traditional logic is used as a comparison with the strategy proposed in this paper. In the fixed logic day ahead optimal scheduling strategy, the energy storage unit only charges and discharges according to the predetermined fixed time period (selects the charging and discharging periods according to the wind and solar load day ahead prediction results to ensure the life of energy storage) and uses the diesel generator set as the main power source for distributed discharge to track the ship load data and the total charging and discharging power of the energy storage system. The economic cost is shown in
Table 3.
The above economic operation cost formula is used to calculate the economic costs of the two methods. Since renewable energy always maintains the maximum power output and no load is in the state of power loss, the renewable energy operation cost and load income of the two strategies are consistent. Through calculation, it can be concluded that compared with the fixed logic strategy, the diesel generator fuel cost of the proposed strategy is reduced by 8.4%, the energy storage cost is reduced by 30%, and the total cost is saved by 8.2%. It not only saves energy but also reduces the pollution to the environment, which proves the superiority of the optimization algorithm proposed in this paper.
Traditional PSO, GA, and DE algorithms are used as comparison algorithms for a performance comparison test to prove the superiority of the proposed IPSO algorithm. The dimension of the standard test function is D = 30. For all test functions and algorithms, the initial value of the algorithm is set as follows: population size
= 100; the maximum number of iterations
= 30; threshold
= 20; and the maximum number of fitness calculations
=
and the convergence error
is set as the termination condition of the algorithm. The simulation results are shown in
Figure 20.
In addition to the function speed of IPSO algorithm is slightly slower than DE algorithm except for function, compared with the other three algorithms, the convergence speed is faster. Among them, when solving function , PSO and GA algorithms have not converged to the allowable error range of when the maximum computation times of 10,000 D are reached, and the same situation also occurs when solving function for PSO algorithm. Both DE and IPSO algorithms achieve global optimal solutions on functions. In addition, the GA algorithm achieves global optimal solutions on functions, but its performance in other functions is not as good as the IPSO algorithm. Although the convergence speed of the DE algorithm is faster than that of the IPSO algorithm on function, the convergence speed of the DE algorithm is not as fast as that of the IPSO algorithm on other functions, so it can be seen that the overall quality of its solution is not as good as that of the IPSO algorithm.
The above figure show the convergence curve of the tested algorithm. Under different test functions, the IPSO algorithm (the solid red line in the figure) is more competitive than the other three algorithms regarding solution quality and convergence speed. The search speed has also been improved while ensuring the accuracy of solution.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



















