
Hybrid Modeling and Simulation for Shipboard Power System Considering High-Power Pulse Loads Integration
Abstract
:1. Introduction
- (1)
- This paper seeks a hybrid model for shipboard power systems considering high-power pulse loads integration, which can deal with multiple concurrent extreme events arriving randomly and fluctuating pulse-load operation, to illustrate the hybrid dynamic evolution process of SPS.
- (2)
- This paper presents the hybrid model in a distributed manner. The proposed model takes full advantage of the zonal distribution structure of SPS and allows each zone in SPS to handle the external events autonomously.
- (3)
- The proposed hybrid model provides a direct input/output interface to be integrated with different-scale continuous models, which allows easy refinement and adjustment to adapt to different ship design intentions and control requirements.
2. Hybrid Model Description for SPS
2.1. Representative SPS
2.2. Automata-Based Hybrid Model for Each Zone
2.3. Global Hybrid Model for SPS
3. Hybrid Simulation Method for SPS
3.1. Continuous Dynamic Mutation Due to Discrete State Transition
3.2. Continuous Dynamic Model Reconstruction and Solving after Discrete State Transition
4. Simulation and Results Analysis
4.1. SPS Start-Up Scenario
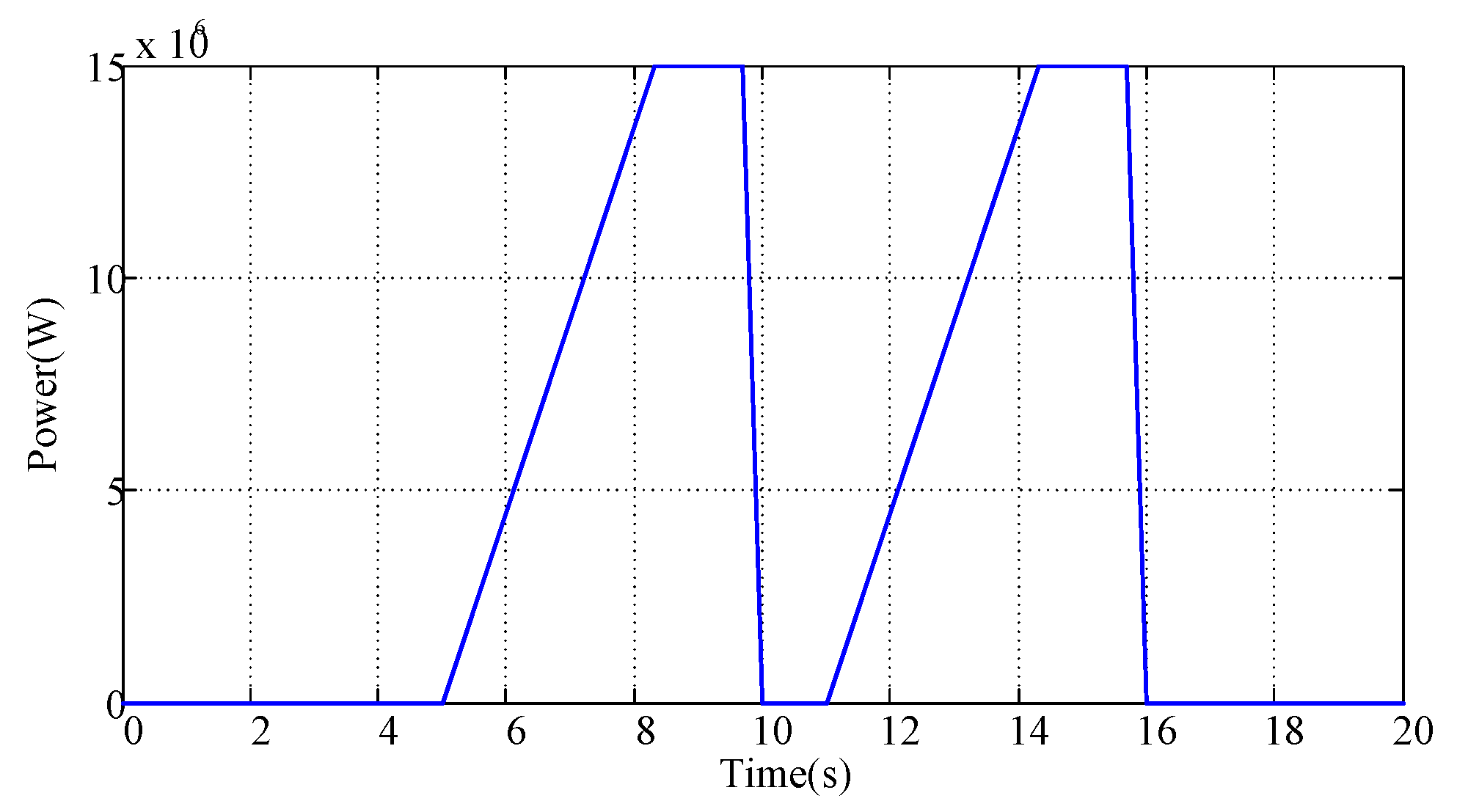
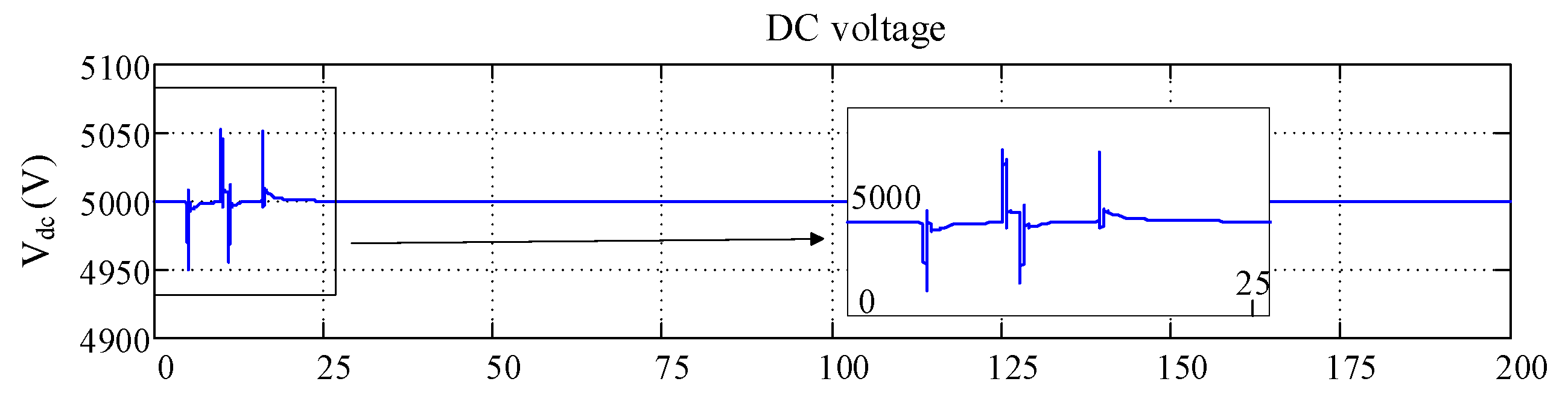
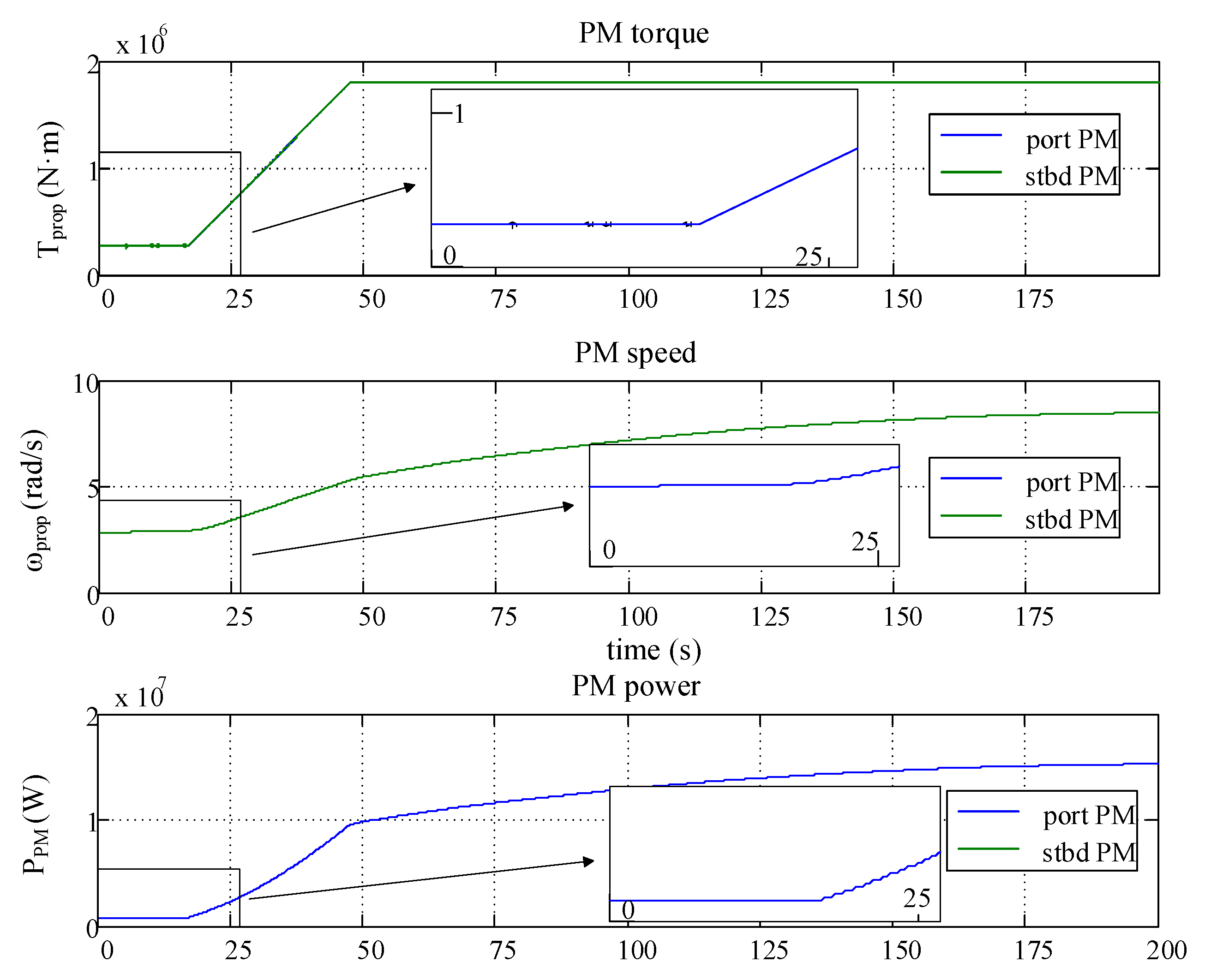
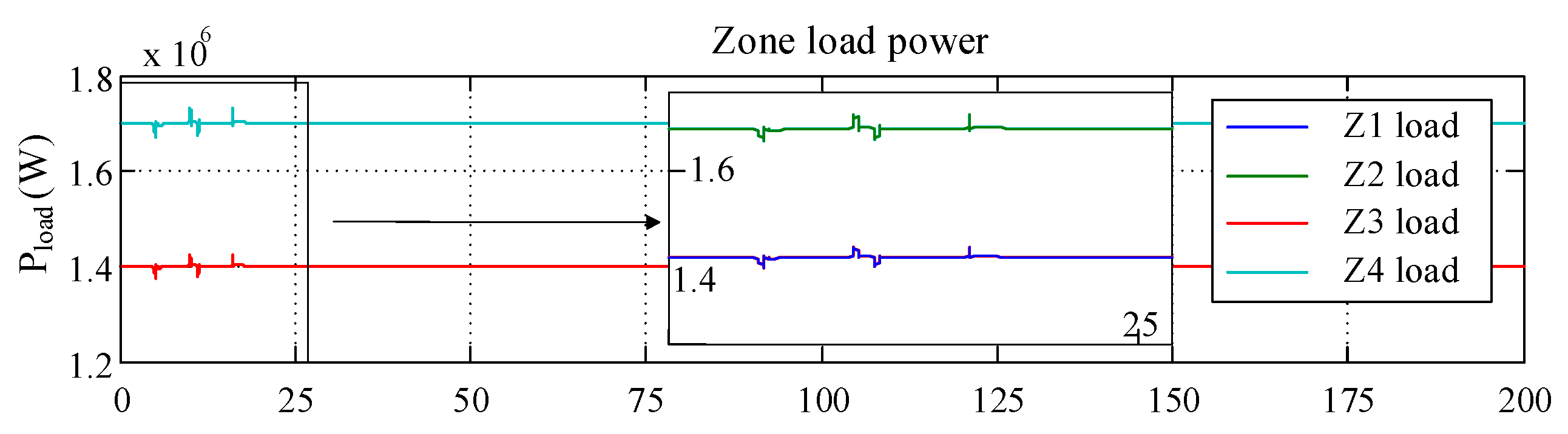
4.2. Pulse Load Launch Scenario
4.3. Comparison and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chalfant, J.S.; Chryssostomidis, C. Analysis of various all-electric-ship electrical distribution system topologies. In Proceedings of the 2011 IEEE Electric Ship Technologies Symposium, Alexandria, VA, USA, 10–13 April 2011; pp. 72–77. [Google Scholar] [CrossRef] [Green Version]
- Doerry, N.; McCoy, K. Next Generation Integrated Power System: NGIPS Technology Development Roadmap; No. SER-05D/349; Naval Sea Systems Command: Washington, DC, USA, 2007. [Google Scholar]
- Doerry, N. Naval Power Systems: Integrated power systems for the continuity of the electrical power supply. IEEE Electrif. Mag. 2015, 3, 12–21. [Google Scholar] [CrossRef]
- Doerry, N.; Amy, J. Design considerations for a reference MVDC power system. Proc. SNAME Marit. Conv. 2016, 124, 40–59. [Google Scholar]
- Zohrabi, N.; Shi, J.; Abdelwahed, S. An overview of design specifications and requirements for the MVDC shipboard power system. Int. J. Electr. Power Energy Syst. 2019, 104, 680–693. [Google Scholar] [CrossRef]
- Domaschk, L.N.; Ouroua, A.; Hebner, R.E.; Bowlin, O.E.; Colson, W.B. Coordination of Large Pulsed Loads on Future Electric Ships. IEEE Trans. Magn. 2007, 43, 450–455. [Google Scholar] [CrossRef] [Green Version]
- Clayton, D.H.; Jebsen, G.M.; Sofia, J.M. The All Electric Warship from Vision to Total Ship System Integration. Nav. Surf. Warf. Cent. Dahlgren Div. 2002, 86, 1–9. [Google Scholar]
- Smart, R.; Chalfant, J.; Herbst, J.; Langland, B.; Card, A.; Leonard, R.; Gattozzi, A. Using S3D to analyze ship system alternatives for a 100 MW 10,000 ton surface combatant. In Proceedings of the 2017 IEEE Electric Ship Technologies Symposium (ESTS), Arlington, VA, USA, 15–17 August 2017; pp. 96–103. [Google Scholar] [CrossRef]
- McCoy Timothy, J.; John, V. The state-of-the-art of integrated electric power and propulsion systems and technologies on ships. In Proceedings of the 2009 IEEE Electric Ship Technologies Symposium, Baltimore, MD, USA, 20–22 April 2009. [Google Scholar]
- Trinklein, E.H.; Parker, G.G.; McCoy, T.J. Modeling, optimization, and control of ship energy systems using exergy methods. Energy 2020, 191, 116542. [Google Scholar] [CrossRef]
- Weaver, W.W.; Robinett, R.D.; Wilson, D.G.; Matthews, R.C. Metastability of pulse power loads using the hamiltonian surface shaping method. IEEE Trans. Energy Convers. 2017, 32, 820–828. [Google Scholar] [CrossRef]
- Shi, J.; Amgai, R.; Abdelwahed, S. Modelling of shipboard medium-voltage direct current system for system level dynamic analysis. IET Electr. Syst. Transp. 2015, 5, 156–165. [Google Scholar] [CrossRef]
- Zahedi, B.; Norum, L.E. Modeling and Simulation of All-Electric Ships With Low-Voltage DC Hybrid Power Systems. IEEE Trans. Power Electron. 2013, 28, 4525–4537. [Google Scholar] [CrossRef]
- Shajari, Z.; Savaghebi, M.; Guerrero, J.M.; Javidi, M.H. Dynamic Performance Assessment of NG-MVDC Shipboard Power System with Distributed Electric Propulsions. In Proceedings of the 2020 IEEE Electric Power and Energy Conference (EPEC), Edmonton, AB, Canada, 14–16 October 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Andrus, M. NGIPS MVDC Baseline Architecture Definition-RTDS Implementation. Center for Advanced Power Systems, Florida State University. 2010. Available online: https://www.esrdc.com/library (accessed on 23 August 2022).
- Lahiri, S. Modeling and Simulation of Shipboard Integrated Power Systems; Drexel University: Philadelphia, PA, USA, 2011. [Google Scholar]
- Skjong, S.; Pedersen, E. A real-time simulator framework for marine power plants with weak power grids. Mechatronics 2017, 47, 24–36. [Google Scholar] [CrossRef] [Green Version]
- Abdelwahed, S.; Asrari, A.; Crider, J.; Dougal, R.A.; Faruque, M.O.; Fu, Y.; Langston, J.; Lee, Y.; Mohammadpour, H.A.; Ouroua, A.; et al. Reduced order modeling of a shipboard power system. In Proceedings of the 2013 IEEE Electric Ship Technologies Sympo-sium (ESTS), Arlington, VA, USA, 22–24 April 2013; pp. 256–263. [Google Scholar] [CrossRef] [Green Version]
- Park, D.; Zadeh, M.K. Dynamic Modeling and Stability Analysis of Onboard DC Power System for Hybrid Electric Ships. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo (ITEC), Novi, MI, USA, 19–21 June 2019; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Zhu, W.; Shi, J.; Abdelwahed, S. End-to-end system level modeling and simulation for medium-voltage DC electric ship power systems. Int. J. Nav. Archit. Ocean. Eng. 2018, 10, 37–47. [Google Scholar] [CrossRef]
- Ghimire, P.; Reddy, N.P.; Zadeh, M.K.; Pedersen, E.; Thorstensen, J. Dynamic Modeling and Real-Time Simulation of a Ship Hybrid Power System Using a Mixed-Modeling Approach. In Proceedings of the 2020 IEEE Transportation Electrification Conference & Expo (ITEC), Chicago, IL, USA, 22–26 June 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Yang, Y.; Zhengming, Z.; Tan, T.; Boyang, L.; Liqiang, Y. Discrete State Event Driven Method and Self-Adapted Pre-dictor-Corrector Algorithm. Trans. China Electrotech. Soc. 2017, 32, 33–41. [Google Scholar]
- Bochen, S.; Zhengming, Z.; Yicheng, Z.; Zhujun, J. Discrete-state Event-driven Simulation Approach for Multi-time-scale Power Electronic Hybrid System. Proc. CSEE 2021, 41, 2980–2989. [Google Scholar]
- Khan, M.S.; Iravani, M.R. Supervisory Hybrid Control of a Micro Grid System. In Proceedings of the 2007 IEEE Canada Electrical Power Conference, Montreal, QC, Canada, 25–26 October 2007; pp. 20–24. [Google Scholar] [CrossRef]
- Sun, L.Y.; Zhang, P.F.; Lv, J.J. Design of Dual-mode Control for Microgrid Inverter Based on Switching System. Control. Eng. China 2021, 28, 1567–1579. [Google Scholar]
- Jiawei, H.; Tong, W.; Zengping, W.; Jiuliang, L.; Jingtian, B. Switching System’s MLE Based Transient Stability Assessment of AC/DC Hybrid System Considering Continuous Commutation Failure. IEEE Trans. Power Syst. 2021, 36, 757–768. [Google Scholar]
- Ke, C.; Yiguo, L.; Junli, Z.; Songlin, C.; Honghai, N.; Bing, L. Dynamic economic dispatch for CHP-MG system based on mixed logical dynamic model and MPC method. In Proceedings of the IEEE 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 1630–1636. [Google Scholar]
- Chamorro, H.R.; Pazmino, C.; Paez, D.; Jimenez, F.; Guerrero, J.M.; Sood, V.K.; Martinez, W. Multi-agent Control Strategy for Microgrids using Petri Nets. In Proceedings of the 2020 IEEE 29th International Symposium on Industrial Electronics (ISIE), Delft, Netherlands, 17–19 June 2020; pp. 1141–1146. [Google Scholar] [CrossRef]
- Lu, X.; Zhou, M.; Ammari, A.C.; Ji, J. Hybrid Petri nets for modeling and analysis of microgrid systems. IEEE/CAA J. Autom. Sin. 2016, 3, 349–356. [Google Scholar] [CrossRef]
- Silva, D.P.; Queiroz, M.D.; Fardin, J.F.; Sales, J.L.F.; Orlando, M.T.D. Hybrid modeling of energy storage system and electrical loads in a pilot-microgrid. In Proceedings of the 2018 13th IEEE International Conference on Industry Applications (INDUSCON), São Paulo, Brazil, 11–14 November 2018; pp. 433–438. [Google Scholar] [CrossRef]
- Babaei, M.; Shi, J.; Zohrabi, N.; Abdelwahed, S. Development of a hybrid model for shipboard power systems. In Proceedings of the 2015 IEEE Electric Ship Technologies Symposium (ESTS), Alexandria, VA, USA, 21–24 June 2015; pp. 145–149. [Google Scholar] [CrossRef]
- Lahiri, S.; Niebur, D.; Kwatny, H.; Bajpai, G.; Beytin, A.; Patel, J.; Kang, R. A software tool for automated management and supervisory control of shipboard Integrated Power Systems. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting, 22–26 July 2012; pp. 1–7. [Google Scholar] [CrossRef]
- Yasar, M.; Beytin, A.; Bajpai, G.; Kwatny, H.G. Integrated Electric Power System supervision for reconfiguration and damage mitigation. In Proceedings of the 2009 IEEE Electric Ship Technologies Symposium, Baltimore, MD, USA, 20–22 April 2009; pp. 345–352. [Google Scholar] [CrossRef]
- Zhu, W.; Liang, Z.; Zhu, Z.; Zhi, P. A Distributed Hybrid Control Framework for Shipboard Power System Reconfiguration. In Proceedings of the 2021 4th IEEE International Conference on Industrial Cyber-Physical Systems (ICPS), Victoria, BC, USA, 10–12 May 2021; pp. 769–774. [Google Scholar] [CrossRef]
- Zhengzhuo, L.; Wanlu, Z.; Jian, S.; Zhiyu, Z.; Pengfei, Z. Ship Integrated Power System reconfiguration research under partial observation. Energy Rep. 2022, 8, 444–452. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | Zone 1 | Zone 2 | Zone 3 | Zone 4 |
|---|---|---|---|---|
| PGM | ATG 4MW | MTG 36MW | MTG 36MW | ATG 4MW |
| PM | 36MW | 36MW | ||
| Pulse Load | 20MW | 1MW | 1MW | |
| Zonal Load | 2MW | 2MW | 2MW | 2MW |
| Devices/Components | Status | ||||
|---|---|---|---|---|---|
| 0 | 1 | 2 | 3 | ||
| Z1 | ATG1 | Offline | Online | ||
| PL1 | Offline | Port Supply | Stbd Supply | Both Supply | |
| ZL1 | Offline | Port Supply | Stbd Supply | Both Supply | |
| Brk1 | Open | Close | |||
| Z2 | MTG1 | Offline | Online | ||
| PL2 | Offline | Port Supply | Stbd Supply | Both Supply | |
| ZL2 | Offline | Port Supply | Stbd Supply | Both Supply | |
| PM1 | Offline | 50% power | Rated power | ||
| Z3 | MTG3 | Offline | Online | ||
| PL3 | Offline | Port Supply | Stbd Supply | Both Supply | |
| ZL3 | Offline | Port Supply | Stbd Supply | Both Supply | |
| PM2 | Offline | 50% power | Rated power | ||
| Z4 | ATG2 | Offline | Online | ||
| ZL4 | Offline | Port Supply | Stbd Supply | Both Supply | |
| Brk2 | Open | Close | |||
| ID | Time (s) | Event Description |
|---|---|---|
| 1 | 0 | Simulation starts; all generator sets running at rated speed |
| 2 | 5 | All generator sets connect to the DC bus |
| 3 | 20 | All zone loads online |
| 4 | 30 | Propulsion subsystems connect to DC bus and ship speed gradually increases to 32 knots |
| 5 | 300 | Simulation ends and record the results |
| ID | Time (s) | Event Description |
|---|---|---|
| 1 | 0 | Simulation starts, ship speed 8 knots |
| 2 | 5 | EMRG starts charging |
| 3 | 10 | EMRG launches |
| 4 | 11 | EMRG charging again |
| 5 | 16 | EMRG launches again |
| 6 | 17 | EMRG disconnects, ship accelerates to 25 knots |
| 7 | 200 | Simulation ends and record the results |
| Research | SPS Topology | Model Type | Model Configuration | Modeling Method | Case Studies |
|---|---|---|---|---|---|
| [12] | DC + Zonal | Continuous | Centralized | Simulink | Pulse load |
| [13] | DC + Radial | Continuous | Centralized | Simulink | Ship acceleration and deceleration |
| [14] | DC + Radial | Continuous | Centralized | Simulink | Ship acceleration + Overloaded + Restoration |
| [15] | DC + Zonal | Continuous | Centralized | RTDS | N/A |
| [20] | DC + Zonal | Continuous | Centralized | Simulink | Ship acceleration + Pulse load |
| [31] | DC + Radial | Hybrid | Centralized | Simulink | Load shedding |
| [32] | AC + Ring | Hybrid | Centralized | Simulink | Supervisory control |
| [33] | AC + Ring | Hybrid | Centralized | Simulink | Reconfiguration |
| Our work | DC + Zonal | Hybrid | Distributed | Simulink | Ship acceleration + Pulse load |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, W.; Jin, C.; Liang, Z. Hybrid Modeling and Simulation for Shipboard Power System Considering High-Power Pulse Loads Integration. J. Mar. Sci. Eng. 2022, 10, 1507. https://doi.org/10.3390/jmse10101507
Zhu W, Jin C, Liang Z. Hybrid Modeling and Simulation for Shipboard Power System Considering High-Power Pulse Loads Integration. Journal of Marine Science and Engineering. 2022; 10(10):1507. https://doi.org/10.3390/jmse10101507
Chicago/Turabian StyleZhu, Wanlu, Chunpeng Jin, and Zhengzhuo Liang. 2022. "Hybrid Modeling and Simulation for Shipboard Power System Considering High-Power Pulse Loads Integration" Journal of Marine Science and Engineering 10, no. 10: 1507. https://doi.org/10.3390/jmse10101507