
Extrapolation of Tractor Traction Resistance Load Spectrum and Compilation of Loading Spectrum Based on Optimal Threshold Selection Using a Genetic Algorithm

Abstract
:1. Introduction
2. Materials and Methods
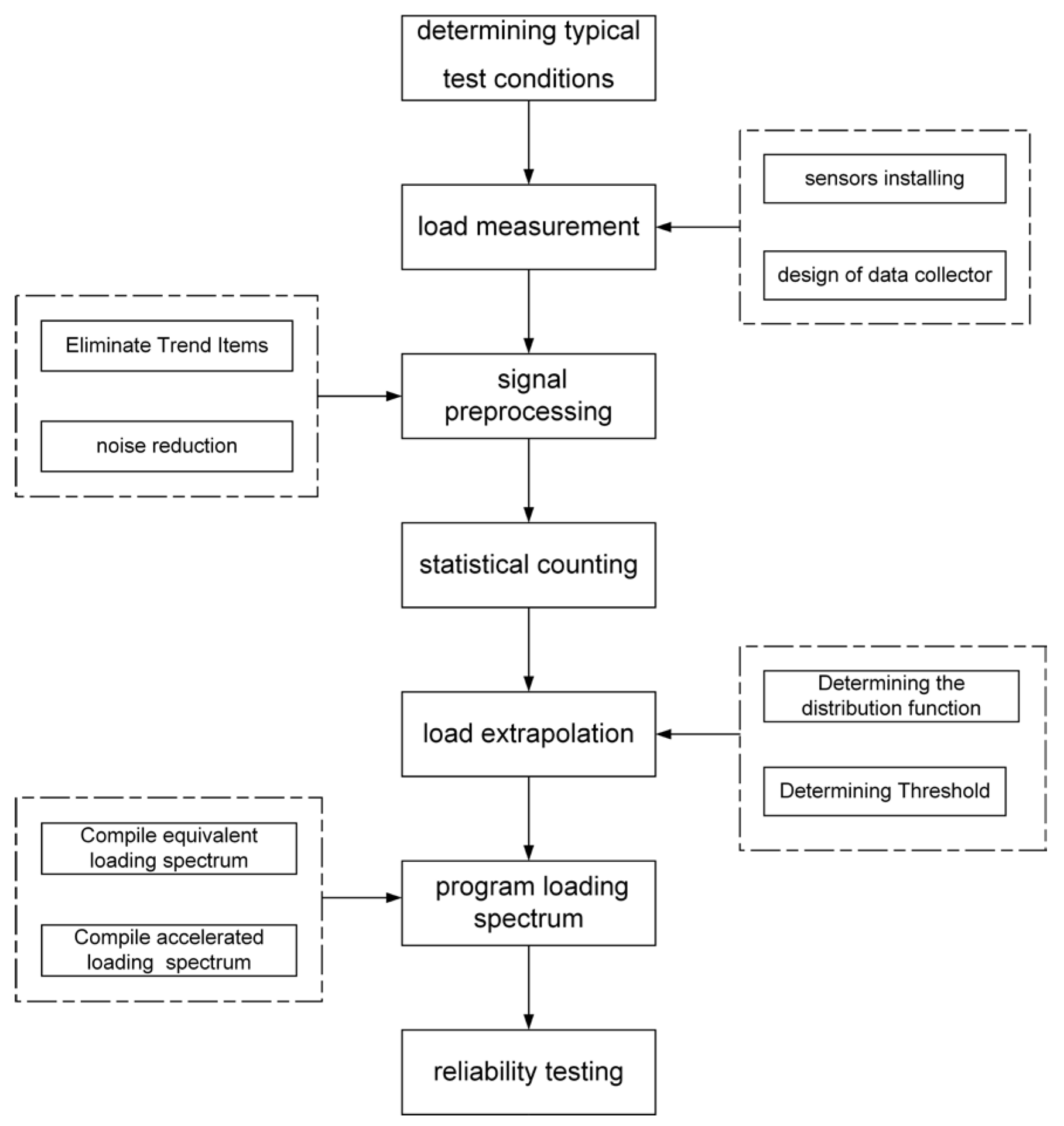
2.1. Load Spectrum Extrapolation Principle and Process
2.2. Collection and Data Preprocessing of Traction Resistance Load Signal
2.2.1. Collection of Traction Resistance Load Signal
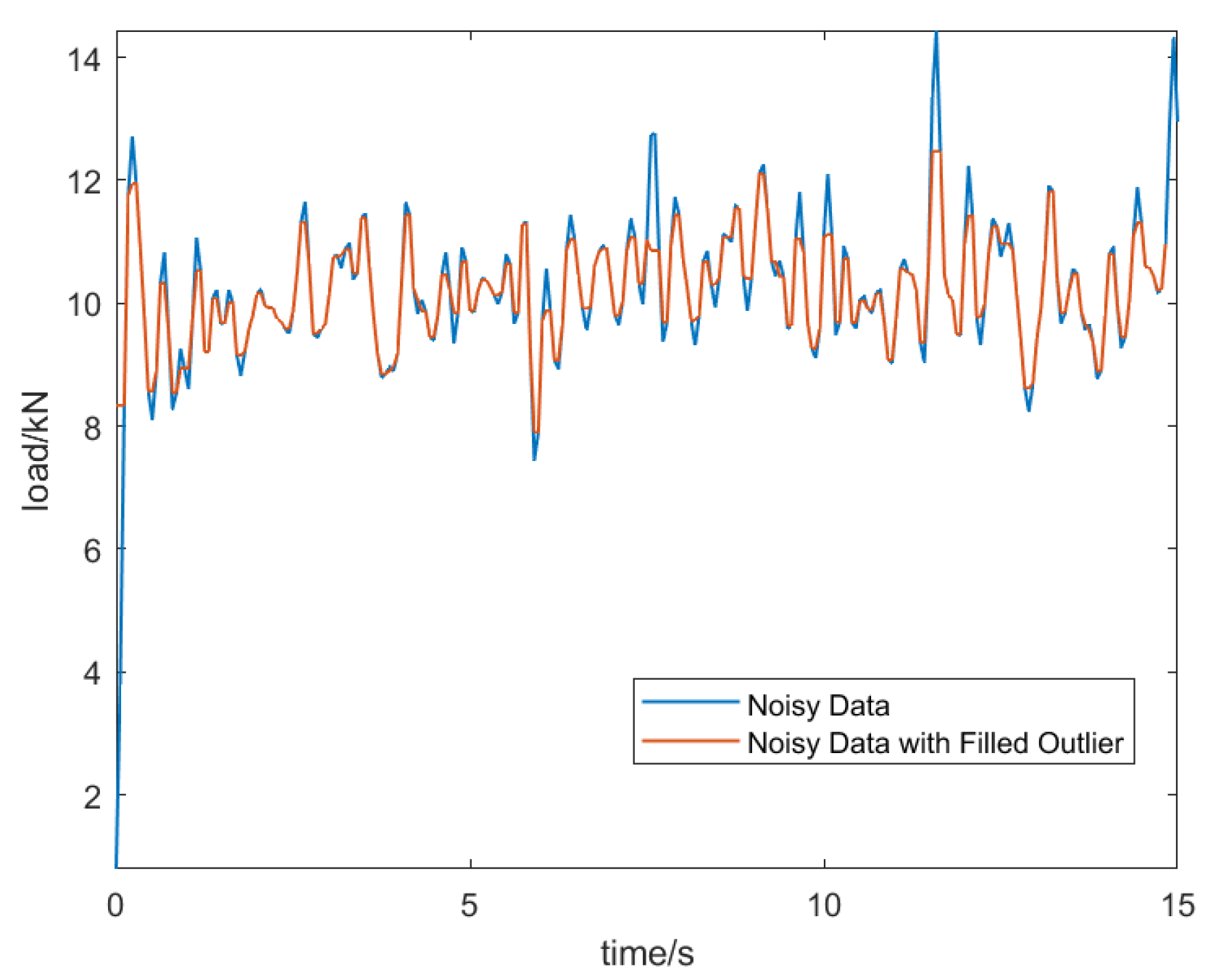
2.2.2. Preprocessing of Traction Resistance Load Signal
2.3. Extrapolation of Traction Resistance Load Spectrum
2.3.1. Determine the Distribution Function
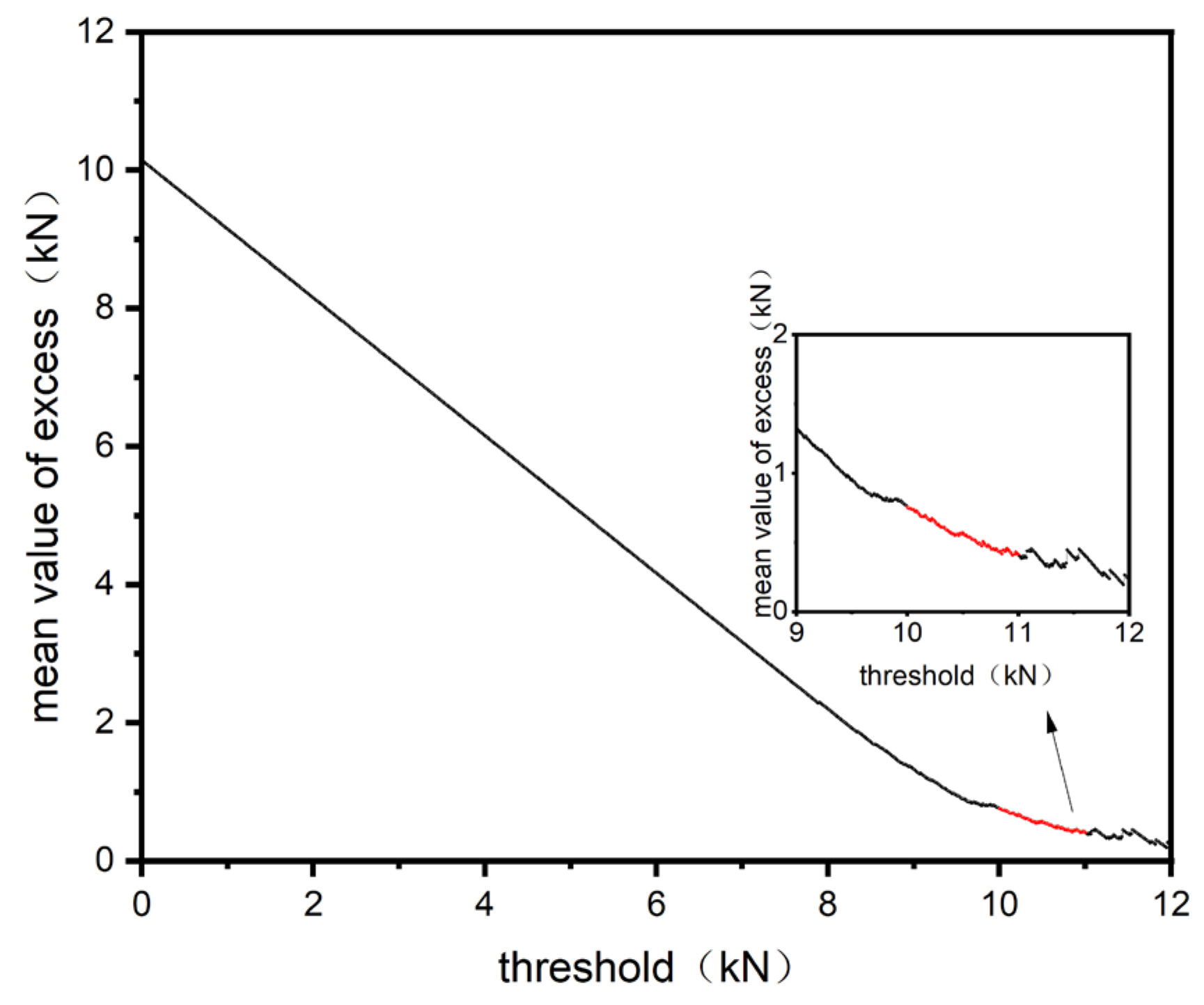
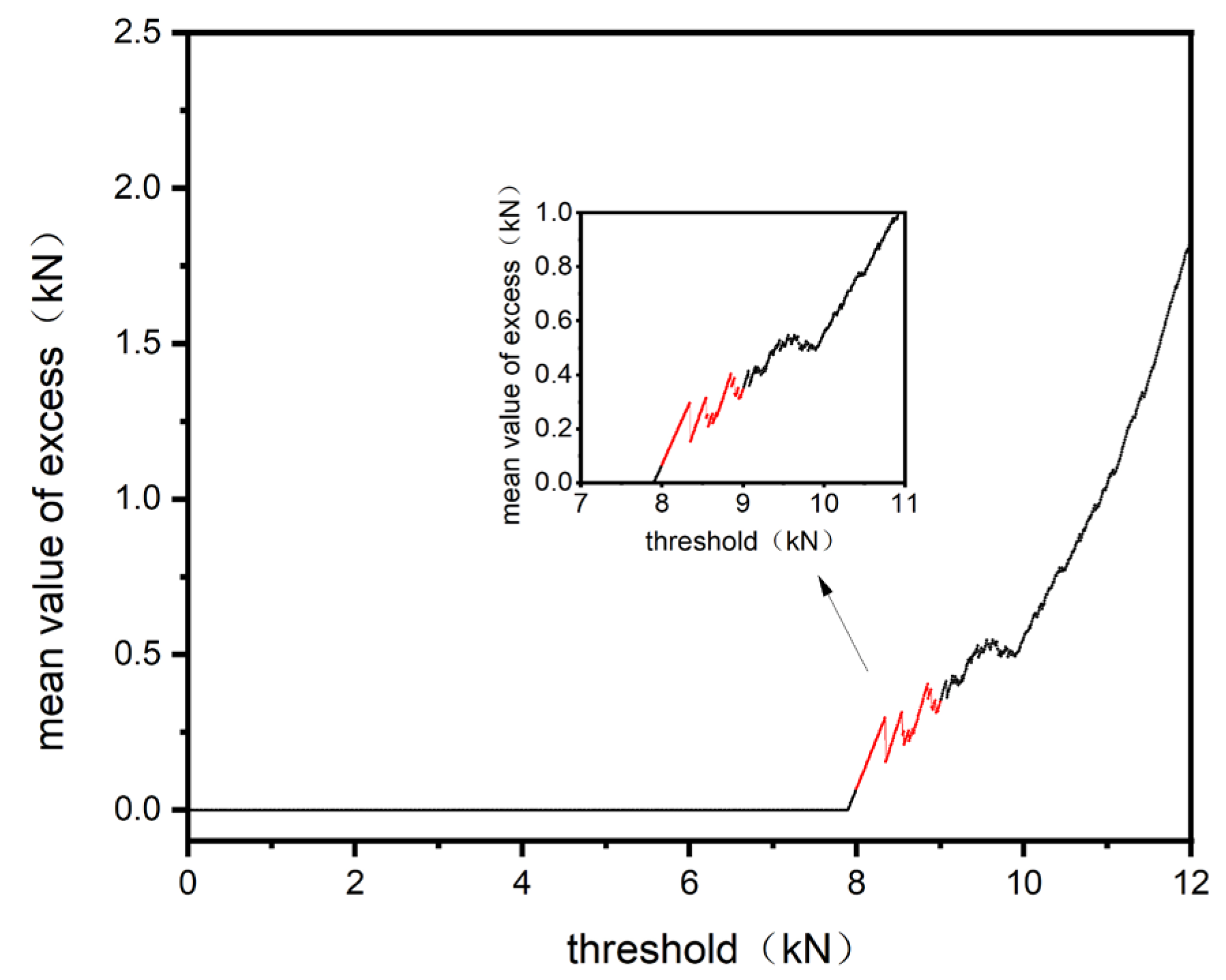
2.3.2. Determining the Threshold
- Threshold selection method based on grey correlation analysis;
- (1)
- Given an alternative threshold, the corresponding excess sample data, and GPD fitting data are shown in Equation (7).
- (2)
- Using the averaging method to perform dimensionless processing on the load sample data and fitting data, as shown in (8).
- (3)
- Calculate the absolute difference between the sample and the fitted data after normalization and calculate the correlation coefficient based on the extreme values.
- (1)
- Calculate alternative thresholds μ Corresponding grey correlation degree λ.
- Optimal threshold selection based on genetic algorithm;
- (2)
- Determine the threshold range and initialize the population. The sample accuracy of the input data is 10−2. If the input data is converted into binary encoding, the encoding length of the individual is:
- (3)
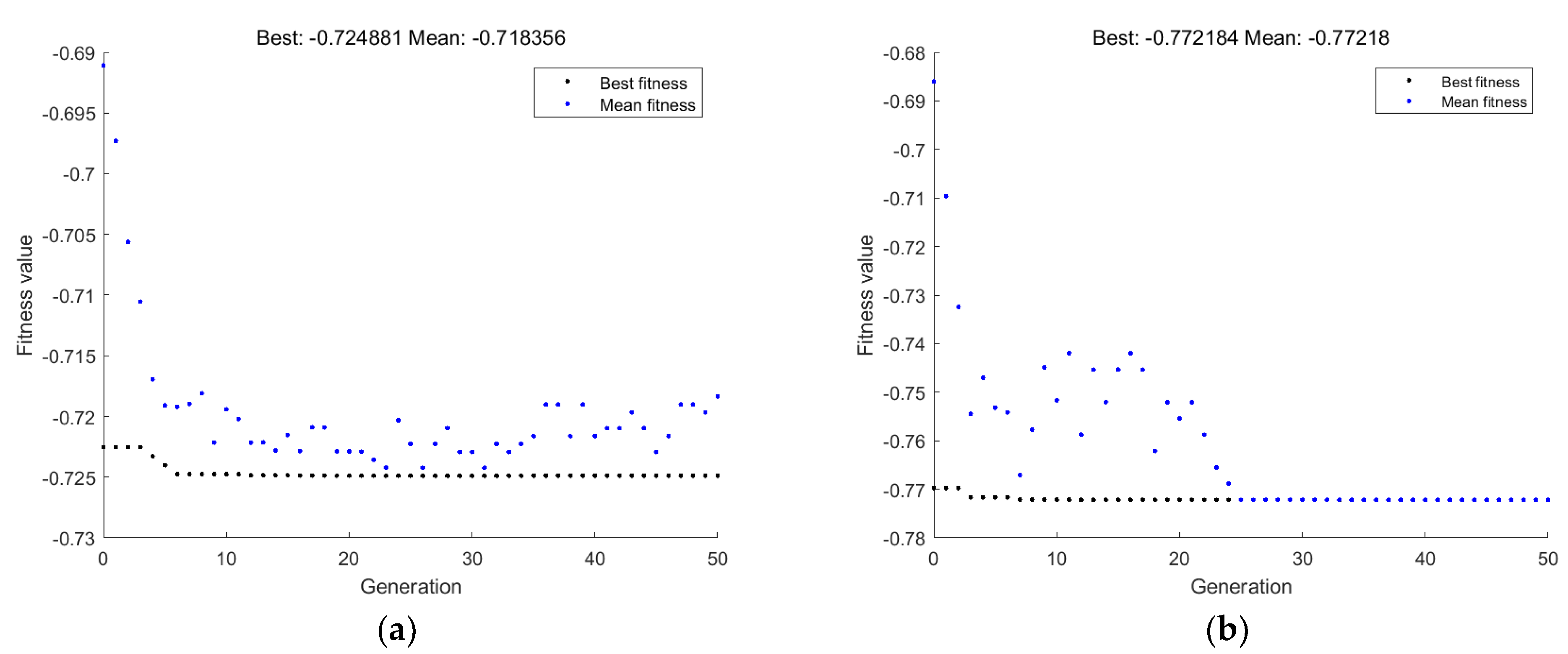
- Calculate individual fitness. Individual fitness is the survival probability of an individual under given environmental conditions. Based on the optimization objective, select the fitness function as the “environmental condition” in the genetic algorithm. This article aims to find the threshold that best fits the GPD function. Therefore, the goodness of fit of each candidate threshold is calculated as the fitness of the individual in the “environment”. This paper takes the grey relational degree as the fitness function. The greater the grey relational degree, the higher the probability that individuals can survive in the environment and pass on genes to the next generation and vice versa.
- (4)
- Individual survival rate. The survival rate of individuals in the environment is essentially the principle of “survival of the fittest” proposed by evolutionary theory. According to the choice function, the individuals with high fitness will have a higher survival rate, and the good genes will be passed on to the next generation, whereas the inferior genes in the population will be eliminated. The common roulette wheel method is selected as the choice function, in which the survival rate of each individual in the population is proportional to its fitness.
- (5)
- Intersection and variation. The crossover and mutation process in genetic algorithms simulates the pairing and mutation of two pairs of chromosomes in nature. During the crossover process, two sets of data exchange “chromosomes” through certain crossover methods to form new individuals. This article adopts a single-point crossover. Mutation refers to the phenomenon where a certain “gene” within the data has a certain probability of being transformed into an opposite gene.
2.4. Equivalence of Traction Resistance Load Signal
3. Results and Discussions
3.1. Load Characterization and Smoothness Testing after Pre-Processing
3.2. Threshold Selection Results and Analysis
3.2.1. Threshold Selection Method Based on Grey Correlation Analysis
3.2.2. Optimal Threshold Selection Based on Genetic Algorithm
3.3. Load Spectrum Extrapolation Reconstruction Results and Validation
3.4. Plotting of Loading Spectra and Accelerated Loading Spectra
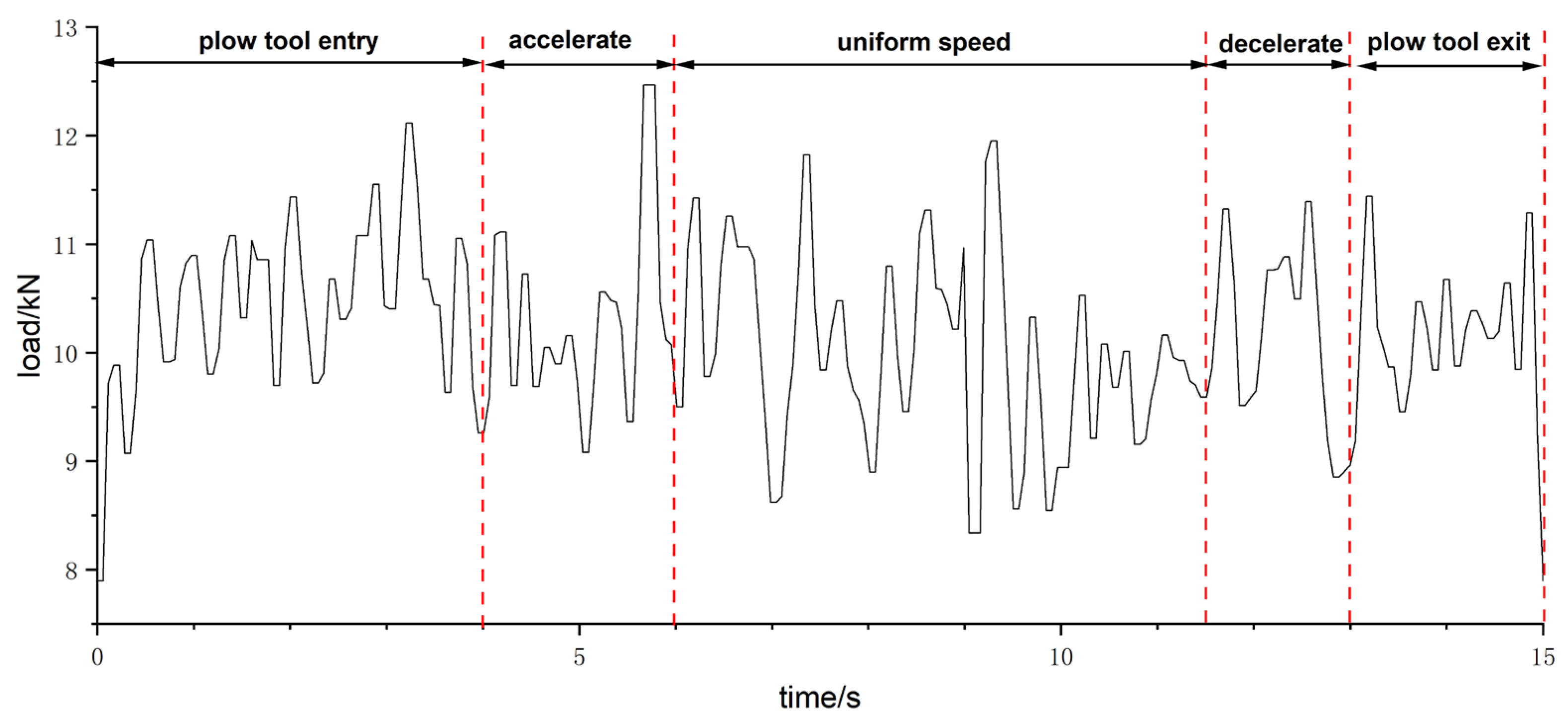
3.4.1. Analysis of the Plowing Process
3.4.2. Division of Loading Loops
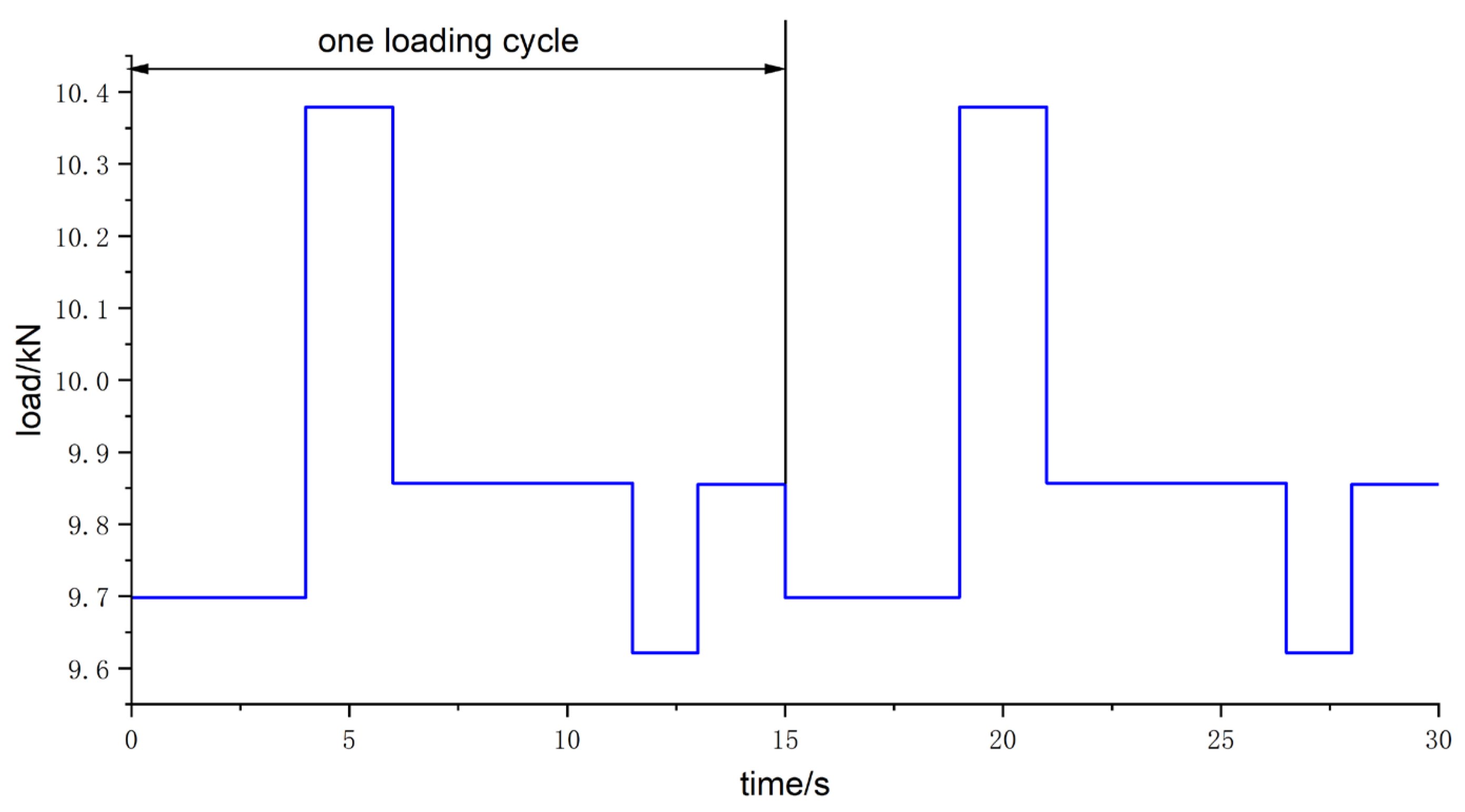
3.4.3. Preparation of Loading Spectra
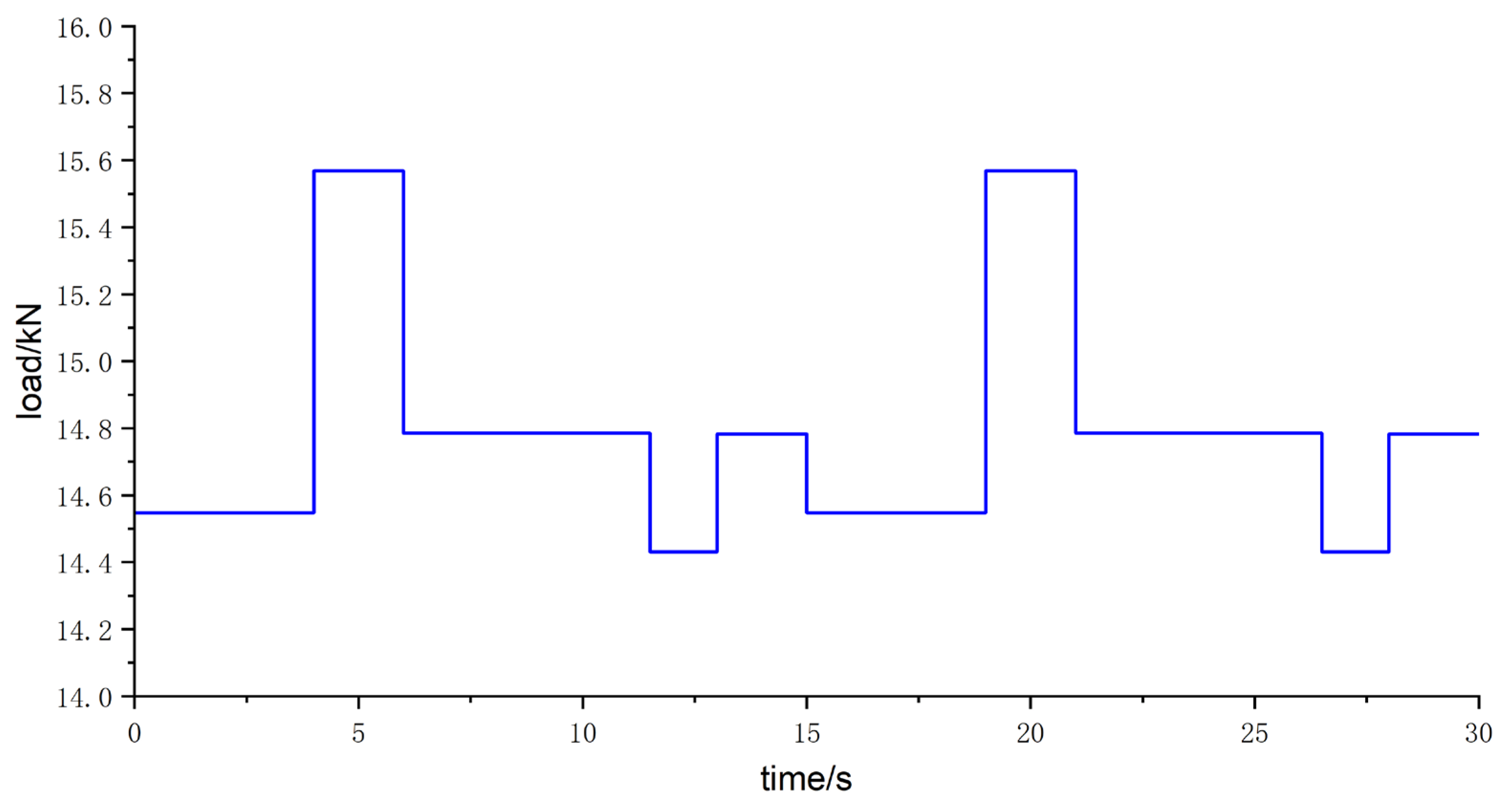
3.4.4. Development of Accelerated Loading Spectrum
4. Conclusions
- (1)
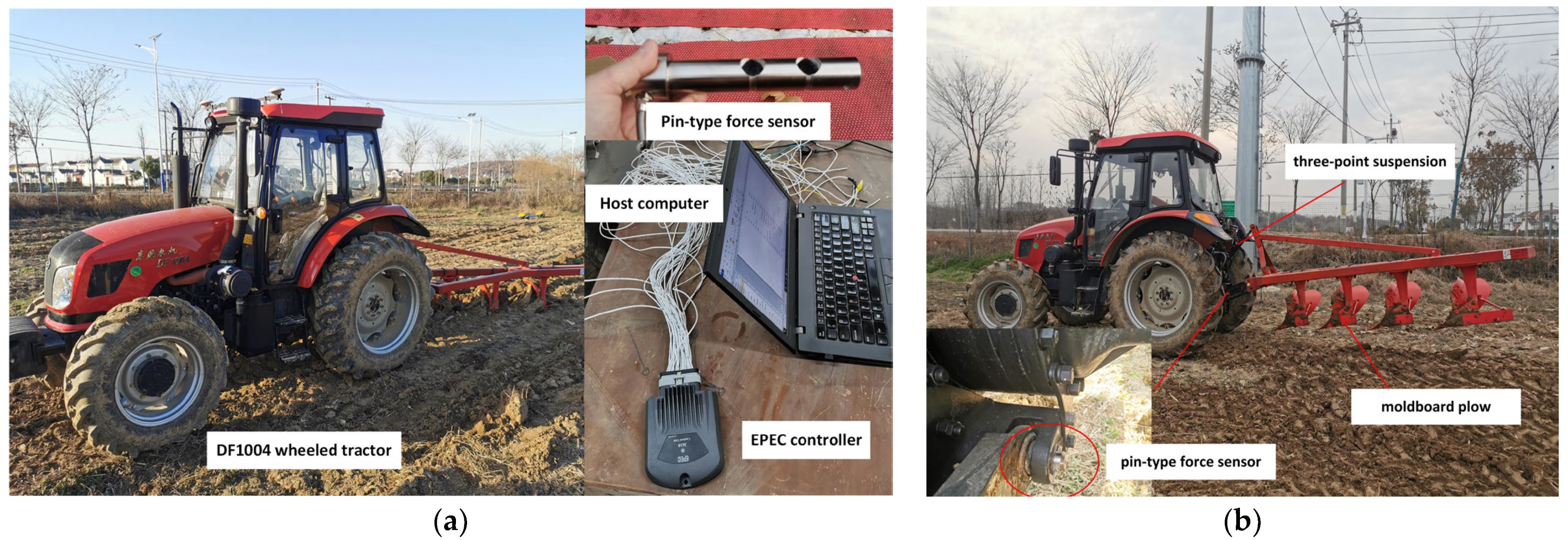
- Taking the Dongfeng DF1004 tractor as the research object, the plowing operation was carried out in a test field with an area of about 5000 m2, and the axle-pin force sensor was used to collect the traction resistance load signal of the three-point suspension device under the plowing condition. We stored sensor signals with the EPEC controller and transmitted them to the host computer. The foundation was laid for plotting the load time course curve later on;
- (2)
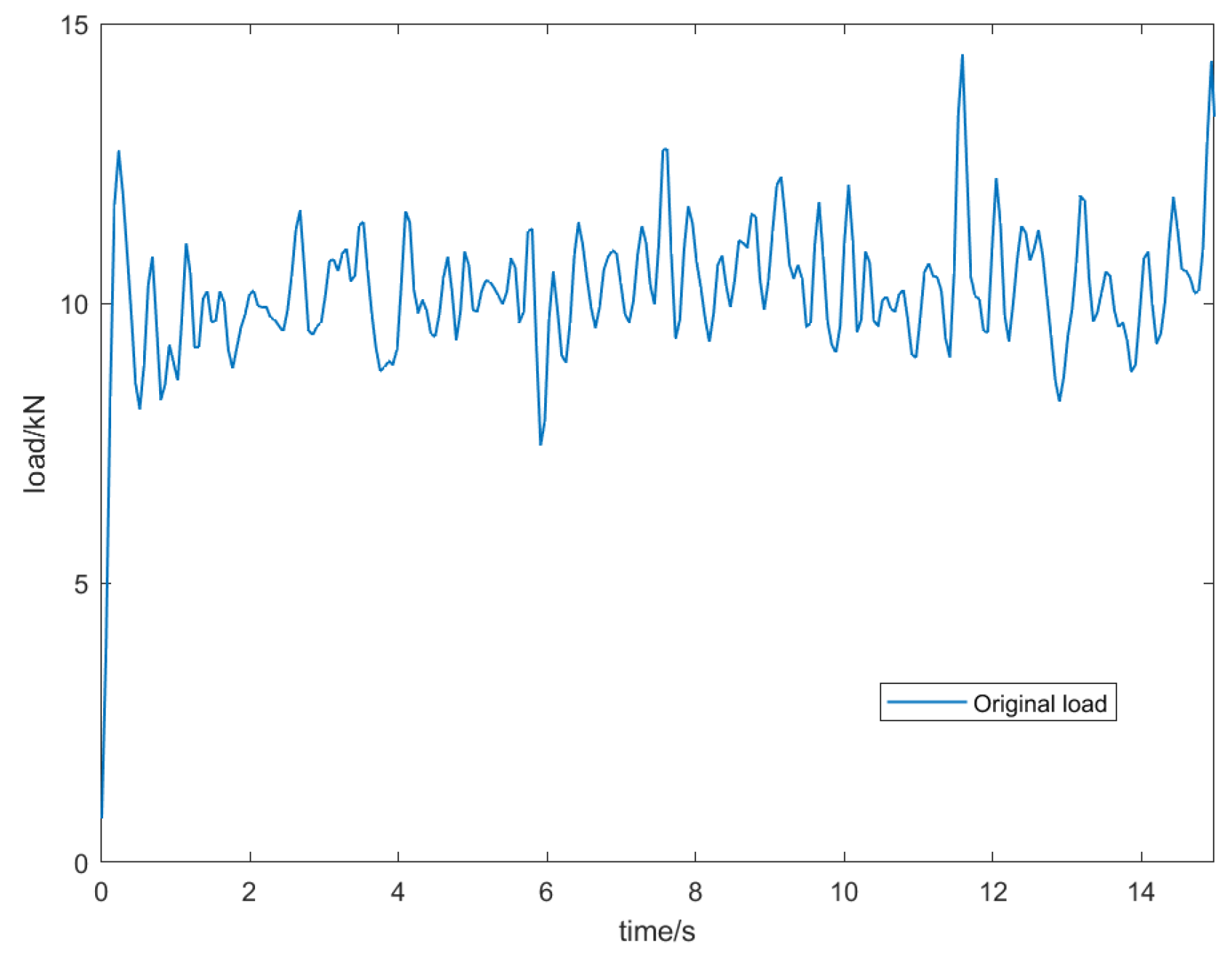
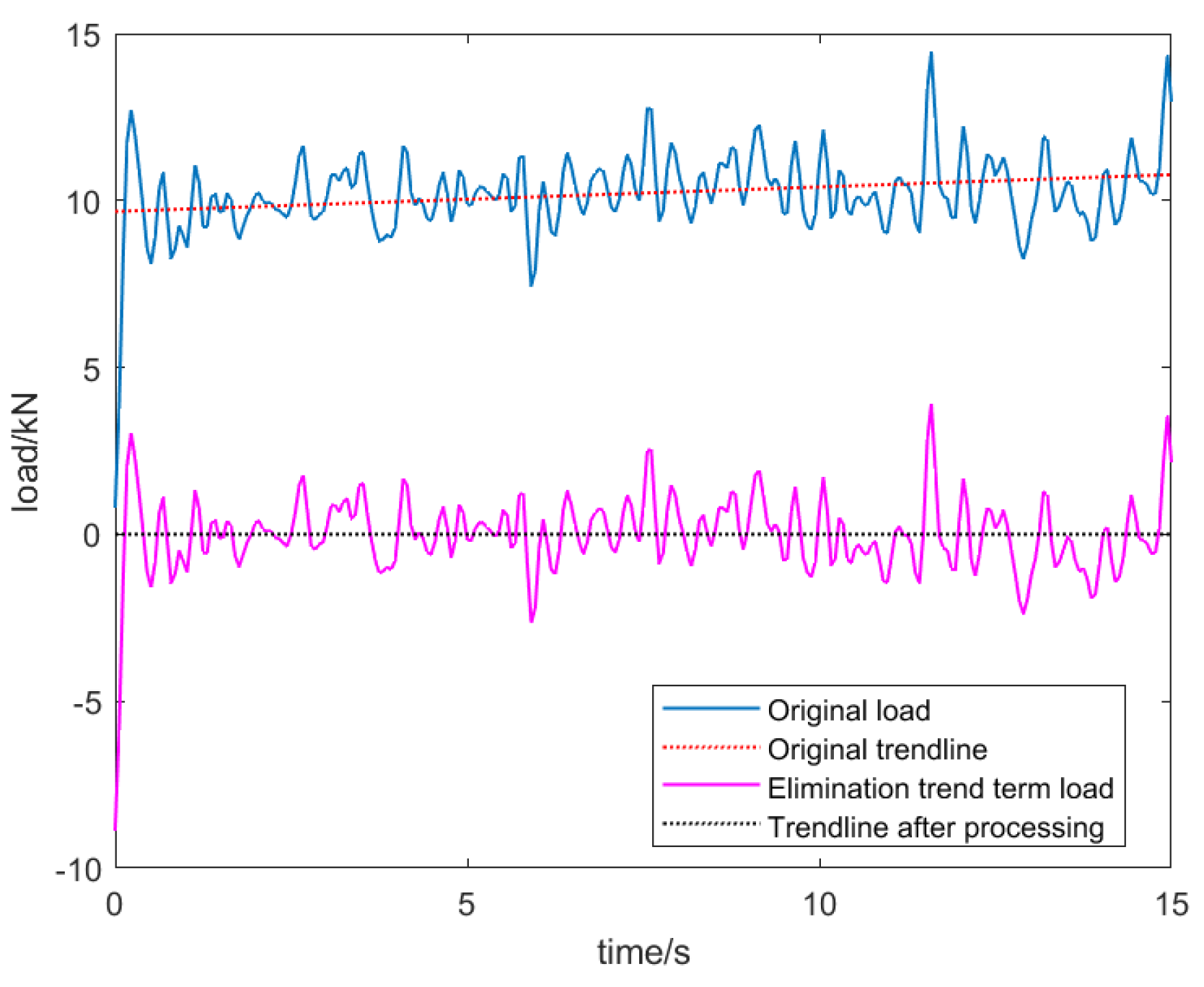
- Based on the least squares method, the original load signal was processed by detrending, the data was noise-reduced by smoothing, and the smoothness of the pre-processed traction resistance load signal was verified by ADF test to obtain the original load time history of traction resistance under plowing conditions, which laid the foundation for the extrapolation and reconstruction of the load spectrum later on;
- (3)
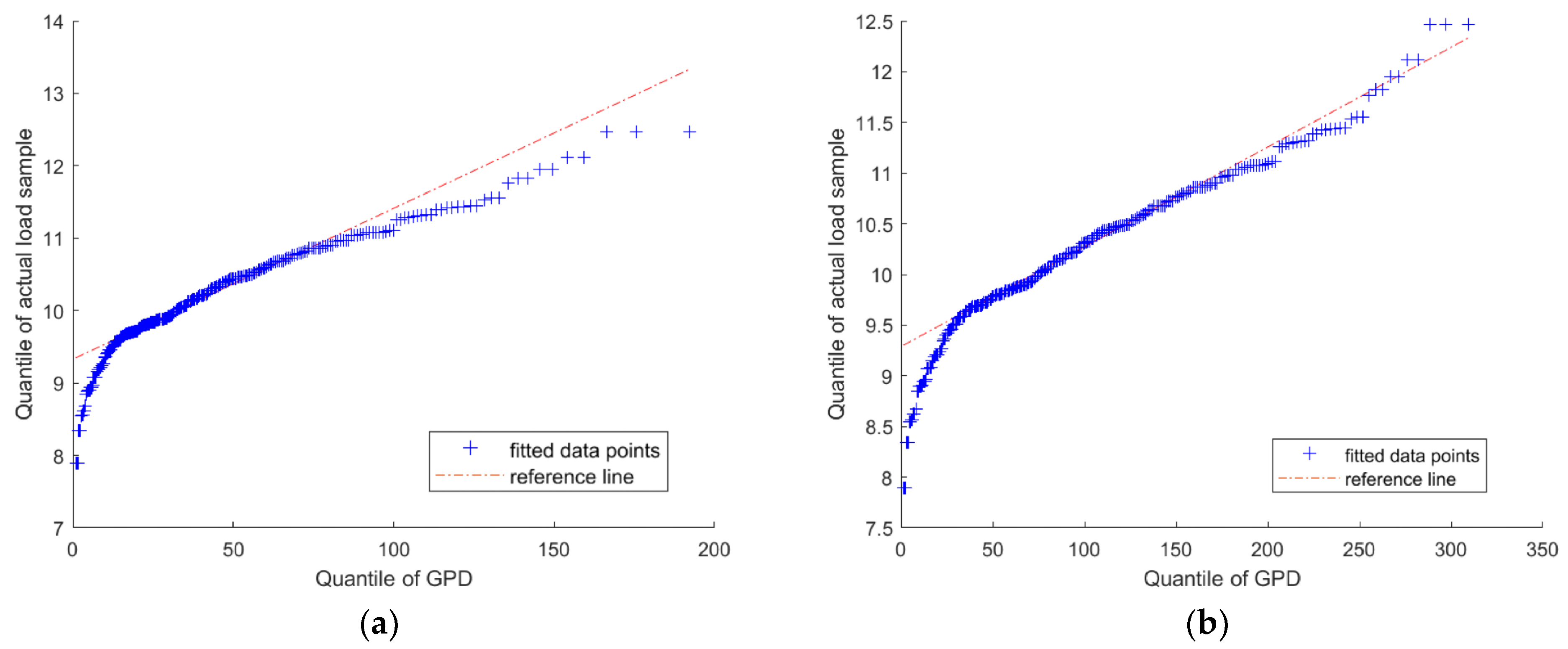
- Based on the POT model, the time-domain extrapolation of the original load data is carried out, and the excess threshold values are selected using gray correlation analysis and genetic algorithm. The threshold values obtained are [8.80 kN, 10.90 kN] and [8.5455 kN, 10.975 kN], respectively, and the GPD distribution goodness-of-fit test is performed on the selected upper and lower thresholds. The fit superiority of the upper and lower thresholds obtained by the genetic algorithm is improved by 0.933% and 7.95%, respectively, which proves that the fitted curves obtained based on the optimal threshold selection of the genetic algorithm can better reflect the actual loading situation;
- (4)
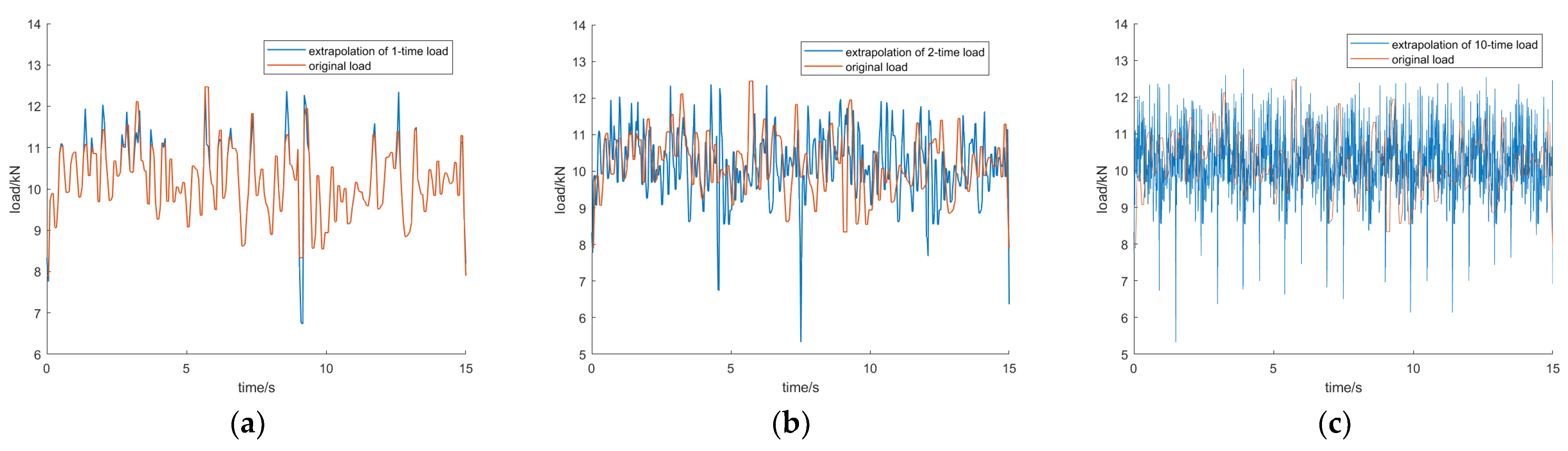
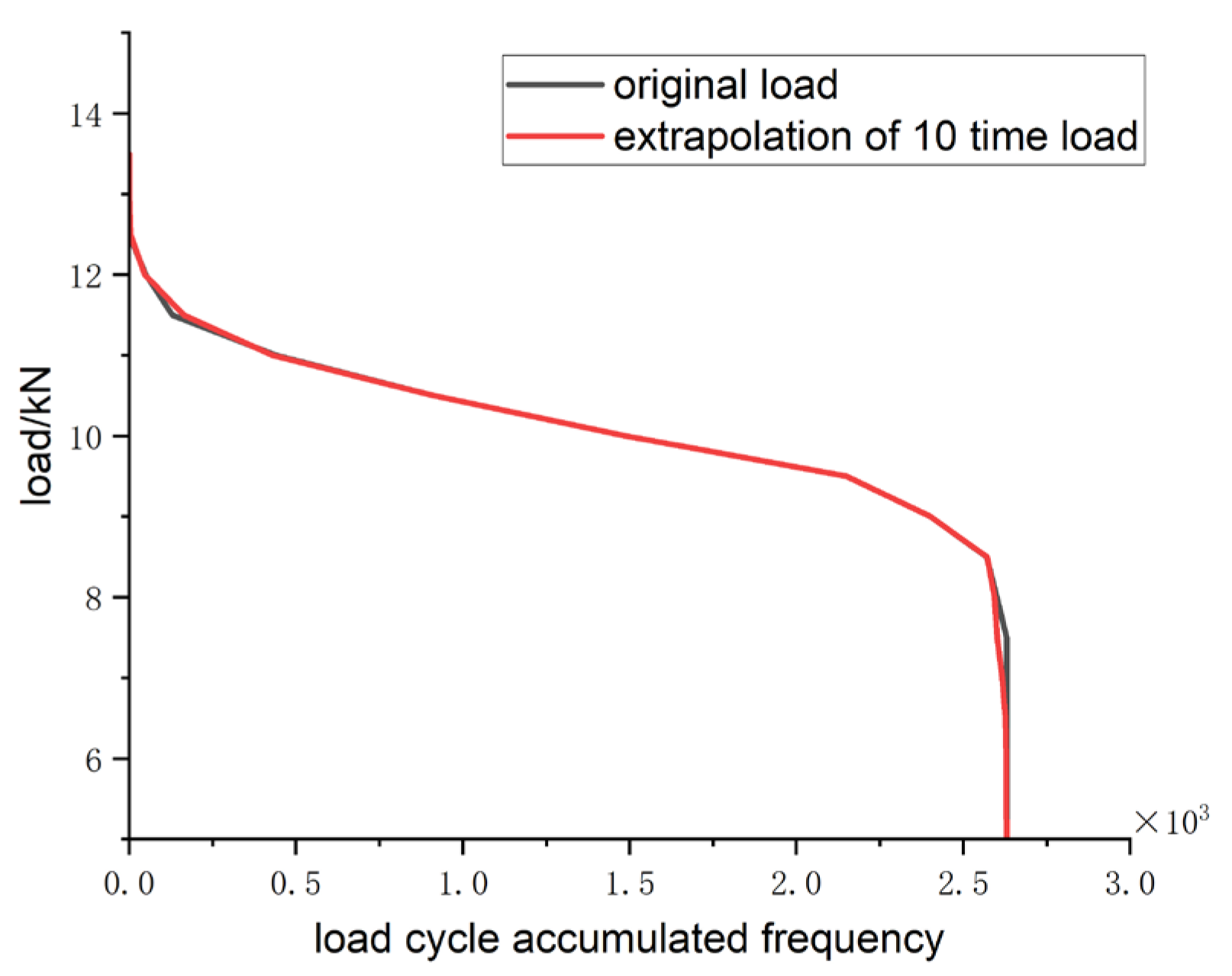
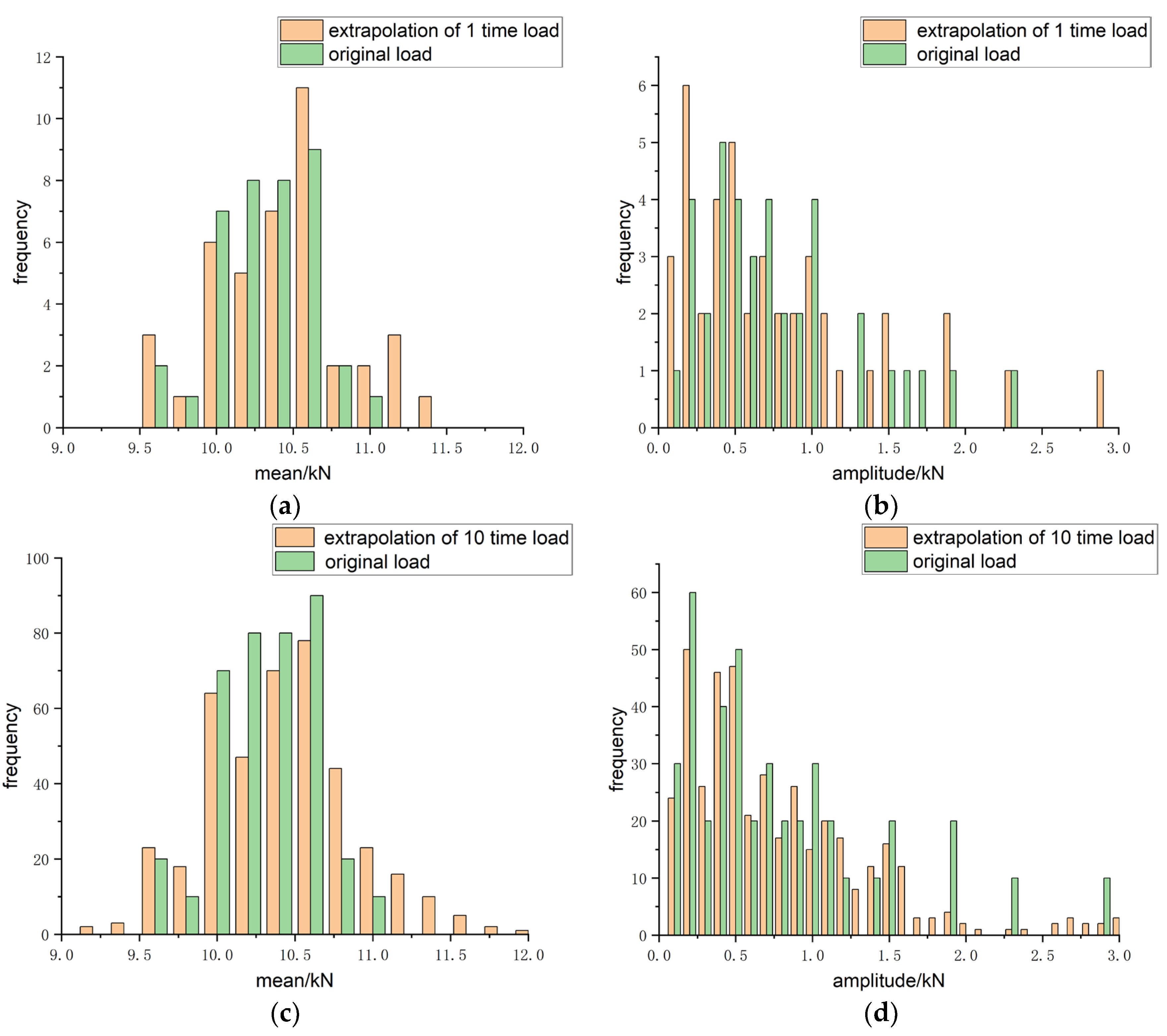
- Based on the threshold thresholds obtained from the optimal threshold selection of the genetic algorithm, the original load time histories were extrapolated and reconstructed. The extrapolated load spectra obtained from the original load signal and 10-fold extrapolation were compared and analyzed by rain flow counting. The results show that the changing trend of the extrapolated load and the accumulated frequency of the original load are basically the same, and the extrapolation method is reasonable; the load cycle distribution obtained by time-domain extrapolation is similar to the load cycle distribution of the original data, and the correlation coefficients of its amplitude and mean value are 0.95913 and 0.99187, respectively. The load cycle distribution can better simulate the real load under the working condition of tractor plowing-distribution law;
- (5)
- The plowing condition is divided into five working stages: plow tool entry, accelerated operation, uniform speed operation, deceleration operation, and plow tool exit. The accumulated frequency of load cycles was extended to 106 times to obtain the amplitude equivalent load spectrum. Based on Miner fatigue theory, the equivalent force of each working stage was calculated, and the loading spectrum under plowing working conditions was drawn. Based on the accelerated life theory, the acceleration factor of 1.5 is obtained according to the S-N curve, and the accelerated loading spectrum under plowing conditions is finally drawn. The accelerated loading spectrum is consistent with the loading spectrum waveform, and only the stress is accelerated to the loading stress, which is convenient for loading on the test bench.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zheng, G.; Wang, Q.; Cai, C. Criterion to determine the minimum sample size for load spectrum measurement and statistical extrapolation. Measurement 2021, 178, 109387. [Google Scholar] [CrossRef]
- He, C. Research on Extrapolation and Compilation Method of Pressure Load Spectrum of Excavator Main Pump. Master’s Thesis, Jilin University, Jilin, China, 2022. [Google Scholar]
- Wang, Q.; Zhou, J.; Gong, D.; Wang, T.; Sun, Y. Fatigue life assessment method of bogie frame with time-domain extrapolation for dynamic stress based on extreme value theory. Mech. Syst. Signal Process. 2021, 159, 107829. [Google Scholar] [CrossRef]
- Shao, X.; Yang, Z.; Mowafy, S.; Zheng, B.; Song, Z.; Luo, Z.; Guo, W. Load characteristics analysis of tractor drivetrain under field plowing operation considering tire-soil interaction. Soil Tillage Res. 2023, 227, 105620. [Google Scholar] [CrossRef]
- Tovo, R. A damage-based evaluation of probability density distribution for rain-flow ranges from random processes. Int. J. Fatigue 2000, 22, 425–429. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, L.; Lv, D.; Wang, S. Extrapolation of Tractor PTO Torque Load Spectrum Based on Automated Threshold Selection with FDR. Trans. J. Agric. Mach. 2021, 52, 364–372. [Google Scholar] [CrossRef]
- Yang, Z.; Song, Z.; Luo, Z.; Zhao, X.; Yin, Y. Time-domain Load Extrapolation Method for Tractor Key Parts Based on EMD-POT Model. J. Mech. Eng. 2022, 58, 252–262. [Google Scholar] [CrossRef]
- He, J.L.; Zhao, X.Y.; Li, G.F.; Chen, C.; Yang, Z.; Hu, L.; Xinge, Z. Time domain load extrapolation method for CNC machine tools based on GRA-POT model. Int. J. Adv. Manuf. Technol. 2019, 103, 3799–3812. [Google Scholar] [CrossRef]
- Yang, Z.H.; Song, Z.H.; Zhao, X.Y.; Zhou, X. Time-domain extrapolation method for tractor drive shaft loads in stationary operating conditions. Biosyst. Eng. 2021, 210, 143–155. [Google Scholar] [CrossRef]
- Yang, Z.; Song, Z.; Yin, Y.; Zhao, X.; Liu, J.; Han, J. Time domain extrapolation method for load of drive shaft of high-power tractor based on POT model. Trans. Chin. Soc. Agric. Eng. 2019, 35, 40–47. [Google Scholar] [CrossRef]
- Dai, D.; Chen, D.; Wang, S.; Li, S.; Mao, X.; Zhang, B.; Wang, Z.; Ma, Z. Compilation and Extrapolation of Load Spectrum of Tractor Ground Vibration Load Based on CEEMDAN-POT Model. Agriculture 2023, 13, 125. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, L.; Zong, J.; Lv, D.; Wang, S. Research on Loading Method of Tractor PTO Based on Dynamic Load Spectrum. Agriculture 2021, 11, 982. [Google Scholar] [CrossRef]
- Wang, L.; Zong, J.; Wang, Y.; Fu, L.; Mao, X.; Wang, S. Compilation and bench test of traction force load spectrum of tractor three-point hitch based on optimal distribution fitting. Trans. Chin. Soc. Agric. Eng. 2022, 38, 41–49. [Google Scholar] [CrossRef]
- Johannesson, P. Extrapolation of load histories and spectra. Fatigue Fract. Eng. Mater. Struct. 2006, 29, 201–207. [Google Scholar] [CrossRef]
- Yang, X.; Liu, X.; Tong, J.; Wang, Y.; Wang, X. Research on load spectrum construction of bench test based on automotive proving ground. J. Test. Eval. 2018, 46, 244–251. [Google Scholar] [CrossRef]
- Yang, X.; Zhang, J.; Ren, W.X. Threshold selection for extreme strain extrapolation due to vehicles on bridges. Procedia Struct. Integr. 2017, 5, 1176–1183. [Google Scholar] [CrossRef]
- Johannesson, P.; Thomas, J.J. Extrapolation of rainflow matrices. Extremes 2001, 4, 241–262. [Google Scholar] [CrossRef]
- Wang, M.; Liu, X.; Wang, X.; Wang, Y.S. Research on load spectrum construction of automobile key parts based on monte carlo sampling. J. Test. Eval. 2018, 46, 1099–1110. [Google Scholar] [CrossRef]
- Nagode, M.; Fajdiga, M. A general multi-modal probability density function suitable for the rainflow ranges of stationary random processes. Int. J. Fatigue 1998, 20, 211–223. [Google Scholar] [CrossRef]
- Yu, L.; An, Y.; He, J.; Li, G.; Wang, S. Research Progress and Development Trend of Load Spectrum Extrapolation Technology for Mechanical and Electrical Equipment. J. Jilin Univ. Eng. Technol. 2023, 53, 941–953. [Google Scholar] [CrossRef]
- Marty, C.; Blanchet, J. Long-term Changes in Annual Maximum Snow Depth and Snowfall in Switzerland Based on Extreme Value Statistics. Clim. Change 2012, 111, 705–721. [Google Scholar] [CrossRef]
- Shao, X.; Song, Z.; Yin, Y.; Xie, B.; Liao, P. Statistical Distribution Modelling and Parameter Identification of the Dynamic Stress Spectrum of a Tractor Front Driven Axle. Biosyst. Eng. 2021, 205, 152–163. [Google Scholar] [CrossRef]
- Wen, C.; Xie, B.; Song, Z.; Yang, Z.; Dong, N.; Han, J.; Yang, Q.; Liu, J. Methodology for designing tractor accelerated structure tests for an indoor drum-type test bench. Biosyst. Eng. 2021, 205, 59–67. [Google Scholar] [CrossRef]
- Deng, X.; Sun, H.; Lu, Z.; Cheng, Z.; An, Y.; Chen, H. Research on Dynamic Analysis and Experimental Study of the Distributed Drive Electric Tractor. Agriculture 2023, 13, 40. [Google Scholar] [CrossRef]
- Cheng, Z.; Lu, Z. Research on Dynamic Load Characteristics of Advanced Variable Speed Drive System for Agricultural Machinery during Engagement. Agriculture 2022, 161, 20161. [Google Scholar] [CrossRef]
- Cheng, Z.; Lu, Z. Research on Load Disturbance Based Variable Speed PID Control and a Novel Denoising Method Based Effect Evaluation of HST for Agricultural Machinery. Agriculture 2021, 960, 960. [Google Scholar] [CrossRef]
- Kayacan, E.; Ulutas, B.; Kaynak, O. Grey system theory-based models in time series prediction. Expert Syst. 2010, 37, 1784–1789. [Google Scholar] [CrossRef]
- Abhang, L.B.; Hameedullah, M. Determination of optimum parameters for multi-performance characteristics in turning by using grey relational analysis. Int. J. Adv. Manuf. Technol. 2012, 63, 13–24. [Google Scholar] [CrossRef]
- Cheng, Z.; Chen, Y.; Li, W.; Liu, J.; Li, L.; Zhou, P.; Chang, W.; Lu, Z. Full Factorial Simulation Test Analysis and I-GA Based Piecewise Model Comparison for Efficiency Characteristics of Hydro Mechanical CVT. Machines 2022, 358, 358. [Google Scholar] [CrossRef]
- Liu, J.; Wen, C.; Xie, B.; Han, J.; Yuan, W. Study on Load Spectrum of Axial Parts Durability Test Bench for Tractor Transmission System. Tractor Farm Transp. 2021, 48, 29–35. [Google Scholar] [CrossRef]
- Dong, G.; Zhang, M.; Wei, L.; Zhang, L. Study on High-cycle Fatigue Criteria of Chassis Components under Multi-axis Random Loads. Chin. Mech. Eng. 2021, 32, 2294–2304. [Google Scholar] [CrossRef]
- Han, Y.; Lin, Y.; Zhang, C.; Wang, D. Customer-related durability test of semi-trailer engine based on failure mode. Eng. Fail. Anal. 2021, 120, 105393. [Google Scholar] [CrossRef]
- Yang, Z.; Song, Z. MCMC Simulation of Agricultural Equipment Load Using Optimal State Number. Trans. Chin. Soc. Agric. Eng. 2021, 37, 15–22. [Google Scholar] [CrossRef]
- An, Z.; Gao, J.; Liu, B. Strength degradation stochastic model based on P-S-N curve. Chin. J. Comput. Mech. 2015, 32, 118–122. [Google Scholar] [CrossRef]
- Heidenreich, N.B.; Schindler, A.; Sperlich, S. Bandwidth Selection for Kernel Density Estimation: A Review of Fully Automatic Selectors. AStA Adv. Stat. Anal. 2013, 97, 403–433. [Google Scholar] [CrossRef]
- Zheng, G.; Zhu, H.; Wu, C.; Xiao, P. Research on Load Spectrum Extrapolation Method Based on Generalized Pareto Distribution of Extreme Value Exceedance. Chin. Mech. Eng. 2020, 31, 2262–2267. [Google Scholar] [CrossRef]
- Carboni, M.; Cerrini, A.; Johannesson, P.; Guidetti, M.; Beretta, S. Load spectra analysis and reconstruction for hydraulic pump components. Fatigue Fract. Eng. Mater. Struct. 2008, 31, 251–261. [Google Scholar] [CrossRef]
- Qin, D.; Xie, L. Fatigue Strength and Reliability Design; Chemical Industry Press: Beijing, China, 2013; pp. 58–262. [Google Scholar]
- Zhao, Y.; Song, Y. Study on Multi-axial Fatigue Experiment Spectrum Compilation Based on Damage Equivalence. J. Aerosp. Power 2009, 24, 2026–2032. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name of Part | Parameter | Parameter Value |
|---|---|---|
| The tractor | Model name | DF1004X |
| Outer dimension (mm × mm × mm) | 4555 × 2270 × 2775 | |
| Wheel pitch (Front wheel mm/rear wheel mm) | 1550–2010, 1650 | |
| Engine-calibrated power (kW) | 73.5 | |
| Minimum ground spacing (mm) | 425 | |
| Minimum service quality (kg) | 4340 | |
| Power output shaft power (kW) | 63 | |
| The sensor | Model name | XZNJNY-T3d30 KN |
| Supply voltage (V) | 12 | |
| Output signal (V) | 2.5–4.5 | |
| The moldboard plow | Model name | 1L-435 |
| Matching power (kW) | 66.1–88.2 | |
| Outer dimension (mm × mm × mm) | 3400 × 1650 × 1350 mm | |
| Total weight (kg) | 1050 | |
| Depth range (mm) | 200–350 | |
| Plow number | 4 | |
| Adjustable range of total tillage (mm) | 1400 | |
| Plow spacing (mm) | 880 | |
| Operating speed (km/h) | 8–12 | |
| Matching tire spacing (mm) | 1700–1900 | |
| Connection type | three-point suspension |
| Minimum /kN | Maximum /kN | Mean /kN | Median /kN | Std /kN | Range /kN | |
|---|---|---|---|---|---|---|
| Before | 0.7946 | 14.44 | 10.22 | 10.2 | 1.232 | 13.65 |
| After | 7.898 | 12.47 | 10.2 | 10.16 | 0.8382 | 4.57 |
| Upper Threshold | Lower Threshold | ||
|---|---|---|---|
| Threshold/kN | Gray Correlation | Threshold/kN | Gray Correlation |
| 10.10 | 0.6763 | 8.60 | 0.6942 |
| 10.20 | 0.6762 | 8.70 | 0.6630 |
| 10.30 | 0.6855 | 8.80 | 0.7153 |
| 10.40 | 0.6788 | 8.90 | 0.6443 |
| 10.50 | 0.6887 | 9.00 | 0.6962 |
| 10.60 | 0.6832 | 9.10 | 0.6738 |
| 10.70 | 0.7005 | 9.20 | 0.6598 |
| 10.80 | 0.7092 | 9.30 | 0.7001 |
| 10.90 | 0.7182 | 9.40 | 0.6620 |
| 11.00 | 0.7173 | 9.50 | 0.6540 |
| Threshold/kN | Scale Parameter σ | Shape Parameter ξ |
|---|---|---|
| 8.80 | 117.7353 | −1.3046 |
| 10.90 | 61.2523 | −0.2479 |
| Upper Threshold/kN | Gray Correlation | Lower Threshold/kN | Gray Correlation | |
|---|---|---|---|---|
| Threshold selection method based on grey correlation analysis | 10.90 | 0.7182 | 8.80 | 0.7153 |
| Threshold selection method based on genetic algorithm | 10.9750 | 0.7249 | 8.5455 | 0.7722 |
| Threshold/kN | Scale Parameter σ | Shape Parameter ξ |
|---|---|---|
| 8.54558 | 146.8319 | −0.4468 |
| 10.975 | 58.5881 | −0.2369 |
| Plow Tool Entry | Accelerated Operation | Uniform Speed Operation | Deceleration Operation | Plow Tool Exit | |
|---|---|---|---|---|---|
| Time/s | 4 | 2 | 5.5 | 1.5 | 2 |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | ||
|---|---|---|---|---|---|---|---|---|---|
| Plow tool entry | Amplitude/kN | 0.4963 | 0.9925 | 1.4888 | 1.985 | 2.4813 | 2.9775 | 3.4738 | 3.9658 |
| Frequency | 3 | 1 | 3 | 3 | 2 | 0 | 0 | 1 | |
| Accelerated operation | Amplitude/kN | 0.4129 | 0.8258 | 1.2387 | 1.6512 | 2.0646 | 2.4774 | 2.8903 | 3.3032 |
| Frequency | 1 | 2 | 2 | 0 | 0 | 1 | 1 | 0 | |
| Uniform speed operation | Amplitude/kN | 0.4563 | 0.9125 | 1.3688 | 1.8250 | 2.2813 | 2.7375 | 3.1938 | 3.6412 |
| Frequency | 12 | 1 | 5 | 0 | 2 | 1 | 2 | 1 | |
| Deceleration operation | Amplitude/kN | 0.4380 | 0.8761 | 1.3141 | 1.7522 | 2.1902 | 2.6282 | 3.0663 | 3.5043 |
| Frequency | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | |
| Plow tool exit | Amplitude/kN | 0.4488 | 0.8975 | 1.3463 | 1.795 | 2.2438 | 2.6925 | 3.1413 | 3.5891 |
| Frequency | 0 | 3 | 2 | 1 | 1 | 0 | 0 | 1 |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | ||
|---|---|---|---|---|---|---|---|---|---|
| Plow tool entry | Amplitude/kN | 0.4963 | 0.9925 | 1.4888 | 1.985 | 2.4813 | 2.9775 | 3.4738 | 3.9658 |
| Frequency | 54,546 | 18,182 | 54,546 | 54,546 | 36,364 | 0 | 0 | 18,182 | |
| Accelerated operation | Amplitude/kN | 0.4129 | 0.8258 | 1.2387 | 1.6512 | 2.0646 | 2.4774 | 2.8903 | 3.3032 |
| Frequency | 18,182 | 36,364 | 36,364 | 0 | 0 | 18,182 | 18,182 | 0 | |
| Uniform speed operation | Amplitude/kN | 0.4563 | 0.9125 | 1.3688 | 1.8250 | 2.2813 | 2.7375 | 3.1938 | 3.6412 |
| Frequency | 218,182 | 18,182 | 90,909 | 0 | 36,364 | 18,182 | 36,364 | 18,182 | |
| Deceleration operation | Amplitude/kN | 0.4380 | 0.8761 | 1.3141 | 1.7522 | 2.1902 | 2.6282 | 3.0663 | 3.5043 |
| Frequency | 0 | 18,182 | 0 | 0 | 18,182 | 0 | 0 | 18,182 | |
| Plow tool exit | Amplitude/kN | 0.4488 | 0.8975 | 1.3463 | 1.795 | 2.2438 | 2.6925 | 3.1413 | 3.5891 |
| Frequency | 0 | 54,546 | 36,364 | 18,182 | 18,182 | 0 | 0 | 18,182 |
| Plow Tool Entry | Accelerated Operation | Uniform Speed Operation | Deceleration Operation | Plow Tool Exit | |
|---|---|---|---|---|---|
| Time/s | 4 | 2 | 5.5 | 1.5 | 2 |
| Equivalent Amplitude/kN | 2.799476 | 2.289872 | 2.565511 | 3.016759 | 2.694487 |
| Equivalent Stress /kN | 9.698 | 10.379 | 9.857 | 9.621 | 9.855 |
| Plow Tool Entry | Accelerated Operation | Uniform Speed Operation | Deceleration Operation | Plow Tool Exit | |
|---|---|---|---|---|---|
| Accelerated Stress/kN | 14.547 | 15.5685 | 14.7855 | 14.4315 | 14.7825 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, M.; Sun, X.; Deng, X.; Lu, Z.; Wang, T. Extrapolation of Tractor Traction Resistance Load Spectrum and Compilation of Loading Spectrum Based on Optimal Threshold Selection Using a Genetic Algorithm. Agriculture 2023, 13, 1133. https://doi.org/10.3390/agriculture13061133
Yang M, Sun X, Deng X, Lu Z, Wang T. Extrapolation of Tractor Traction Resistance Load Spectrum and Compilation of Loading Spectrum Based on Optimal Threshold Selection Using a Genetic Algorithm. Agriculture. 2023; 13(6):1133. https://doi.org/10.3390/agriculture13061133
Chicago/Turabian StyleYang, Meng, Xiaoxu Sun, Xiaoting Deng, Zhixiong Lu, and Tao Wang. 2023. "Extrapolation of Tractor Traction Resistance Load Spectrum and Compilation of Loading Spectrum Based on Optimal Threshold Selection Using a Genetic Algorithm" Agriculture 13, no. 6: 1133. https://doi.org/10.3390/agriculture13061133