
Calibration of Contact Parameters for Particulate Materials in Residual Film Mixture after Sieving Based on EDEM

Abstract
:1. Introduction
2. Materials and Methods
2.1. Determination of Intrinsic Parameters and the Dynamic Angle of Repose
2.1.1. Particle Size Distribution and Moisture Content Determination
- Using a JMB 5003 electronic balance (range: 0~500 g; precision: 0.001 g; supplier: Suzhou Golden Diamond Weighing Equipment System Development Co., Ltd., Suzhou, China) for weighing the total mass.
- Using a standard sieve (aperture range: 1~5 mm; supplier: Zhejiang Shaoxing Shangyu Shengchao Instrument Equipment Co., Ltd., Shaoxing, China) to sieve and weigh the materials.
- Using a Sartorius MA-45 rapid moisture content tester (mass precision: 0.01 g; accuracy precision: 0.01%; supplier: Shanghai Minyi Electronics Co., Ltd., Shanghai, China) to test the moisture content of the soil and cotton residues.
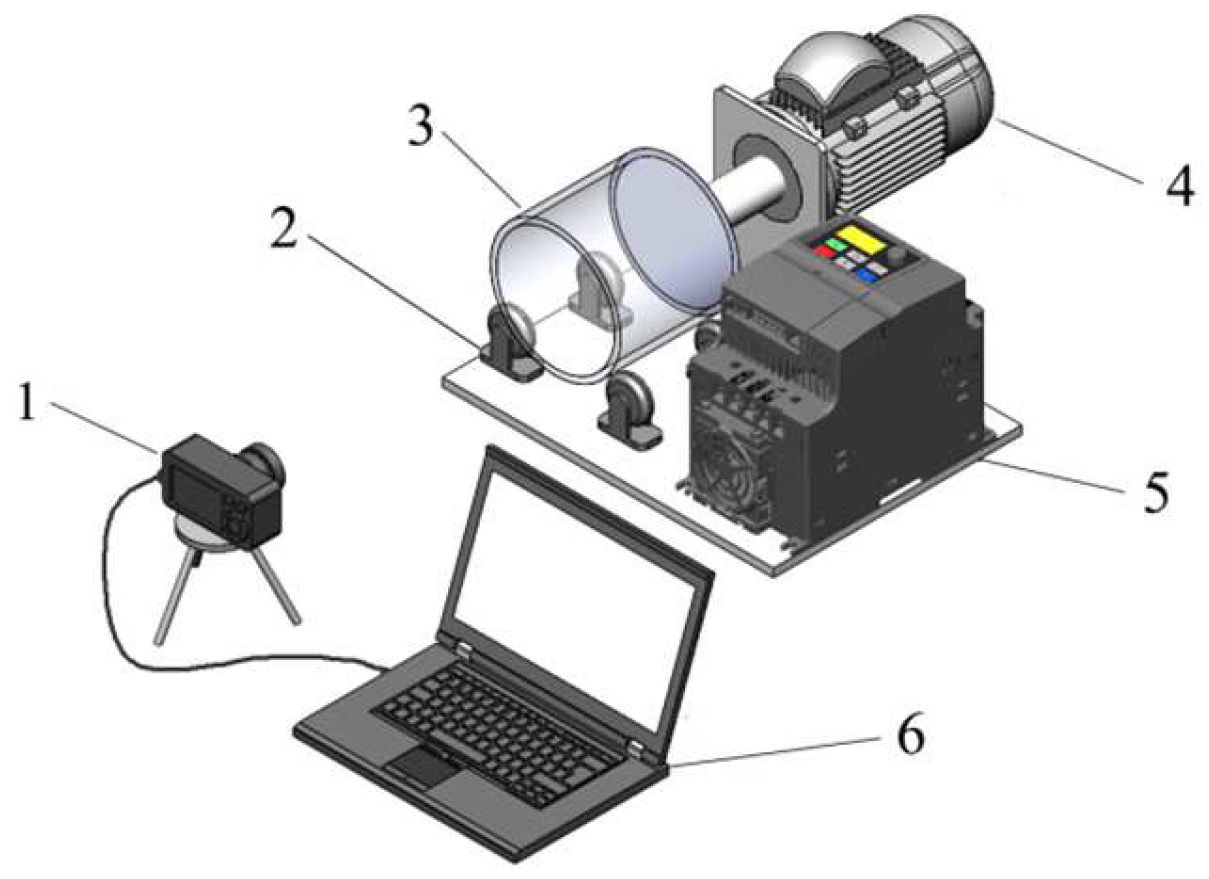
2.1.2. Determination of the Dynamic Angle of Repose
- Use a high-frame-rate camera (resolution ratio: 1280 × 720; frame rate: 120 fps) to capture the flow image of the materials in the drum.
- Apply OpenCV software to denoise the captured image to reduce the impact of noise on the image quality. Detect the edge of the material, extract the boundary and obtain the pixel coordinates of the particle boundary.
- Use the least square method for the fitting of the extracted particle boundary. Calculate the dynamic angle of repose by fitting the linear equation, as shown in Figure 3.
2.2. Simulated Calibration of Simulation Parameters
2.2.1. Geometric Model
2.2.2. Contact Model
- Soil: Poisson’s ratio, 0.4; shear modulus, 1.09 × 106 Pa; density, 1446 kg∙m−3;
- Cotton residue: Poisson’s ratio, 0.35; shear modulus, 1 × 106 Pa; density, 319 kg∙m−3;
- PMMA: Poisson’s ratio, 0.5; shear modulus, 3.5 × 107 Pa; density, 1180 kg∙m−3.
2.2.3. Plackett–Burman Test
2.2.4. Steepest Climbing Test
2.2.5. Box–Behnken Test
3. Results and Discussion
3.1. Analysis of Plackett–Burman Test Factor Significance
3.2. Analysis of Steepest Climbing Test Results
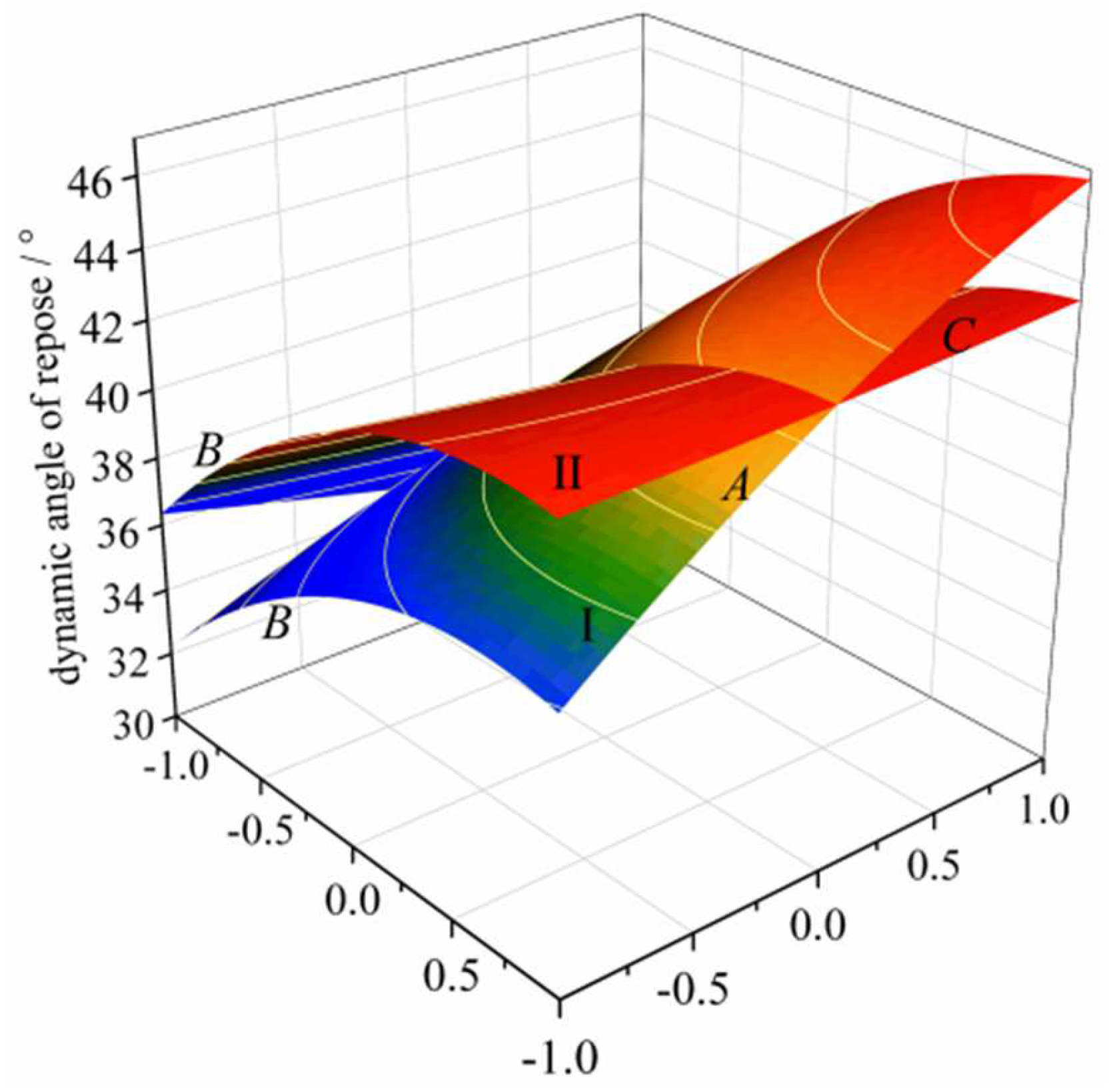
3.3. Analysis of Box–Behnken Test Results
4. Parameter Optimization and Verification Test
4.1. Determination of Optimal Parameter Combination
4.2. Verification Test
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, H.; Lin, T.; Tang, Q.; Cui, J.; Guo, R.; Wang, L.; Zheng, Z. Effects of planting pattern on canopy light utilization and yield formation in machine-harvested cotton field. Trans. Chin. Soc. Agric. Eng. 2021, 37, 54–63. [Google Scholar]
- Wang, Z.; He, H.; Zheng, X.; Zhang, J.; Li, W. Effect of cotton stalk returning to fields on residual film distribution in cotton fields under mulched drip irrigation in typical oasis area in Xinjiang. Trans. Chin. Soc. Agric. Eng. 2018, 34, 120–127. [Google Scholar]
- Hu, C.; Wang, X.; Chen, X.; Tang, X.; Zhao, Y.; Yan, C. Current situation and control strategies of residual film pollution in Xinjiang. Trans. Chin. Soc. Agric. Eng. 2019, 35, 223–234. [Google Scholar]
- Zhao, Y.; Chen, X.; Wen, H.; Zheng, X.; Niu, Q.; Kang, J. Research status and prospect of control technology for residual plastic film pollution in farmland. Trans. Chin. Soc. Agric. Machin. 2017, 48, 1–14. [Google Scholar]
- Liang, R.; Chen, X.; Zhang, B.; Meng, H.; Jiang, P.; Peng, X.; Kan, Z.; Li, W. Problems and countermeasures of recycling methods and resource reuse of residual film in cotton fields of Xinjiang. Trans. Chin. Soc. Agric. Eng. 2019, 35, 1–13. [Google Scholar]
- Jiang, D.; Chen, X.; Yan, L.; Zhang, R.; Wang, Z.; Wang, M. Research on technology and equipment for utilization of residual film in farmland. Trans. Chin. Soc. Agric. Machin. 2021, 41, 179–190. [Google Scholar]
- Zeng, Z.; Ma, X.; Cao, X.; Li, Z.; Wang, X. Critical review of applications of discrete element method in agricultural engineering. Trans. Chin. Soc. Agric. Machin. 2021, 52, 1–20. [Google Scholar]
- Marshall, J.S. Discrete-element modeling of particulate aerosol flows. J. Comput. Phys. 2009, 228, 1541–1561. [Google Scholar] [CrossRef]
- Lorenzo, V.G.; Antonio, B.; Marco, V.; Graziano, F. Micromechanics and strength of agglomerates produced by spray drying. JCIS Open 2023, 9, 100068. [Google Scholar] [CrossRef]
- Wang, G. Discrete Element Method and Its Practice in EDEM; Northwest University of Technology Press: Xi’an, China, 2010; pp. 15–32. [Google Scholar]
- Hu, G. Analysis and Simulation of Particle System by Discrete Element Method; Wuhan University of Technology Press: Wuhan, China, 2010; pp. 7–15. [Google Scholar]
- Li, J.; Tong, J.; Hu, B.; Wang, H.; Mao, C.; Ma, Y. Calibration of parameters of interaction between clayey black soil with different moisture content and soil-engaging component in northeast China. Trans. Chin. Soc. Agric. Eng. 2019, 35, 130–140. [Google Scholar]
- Wang, X.; Hu, H.; Wang, Q.; Li, H.; He, J.; Chen, W. Calibration method of soil contact characteristic parameters based on DEM theory. Trans. Chin. Soc. Agric. Machin. 2017, 48, 78–85. [Google Scholar]
- Xiang, W.; Wu, M.; Lu, J.; Quan, W.; Ma, L.; Liu, J. Calibration of simulation physical parameters of clay loam based on soil accumulation test. Trans. Chin. Soc. Agric. Eng. 2019, 35, 116–123. [Google Scholar]
- Shi, L.; Zhao, W.; Sun, W. Parameter calibration of soil particles contact model of farmland soil in northwest arid region based on discrete element method. Trans. Chin. Soc. Agric. Eng. 2017, 33, 181–187. [Google Scholar]
- Zhang, R.; Han, D.; Ji, Q.; He, Y.; Li, J. Calibration methods of sandy soil parameters in simulation of discrete element method. Trans. Chin. Soc. Agric. Machin. 2017, 48, 49–56. [Google Scholar]
- Kanakabandi, C.K.; Goswami, T.K. Determination of properties of black pepper to use in discrete element modeling. Int. J. Food Eng. 2019, 246, 111–118. [Google Scholar] [CrossRef]
- Cunha, R.N.; Santos, K.G.; Lima, R.N.; Duarte, C.R.; Barrozo, M. Repose angle of monoparticles and binary mixture: An experimental and simulation study. Powder Technol. 2016, 303, 203–211. [Google Scholar] [CrossRef]
- Hao, J.; Long, S.; Li, J.; Ma, Z.; Zhao, X.; Zhao, J.; Li, H. Effect of granular ruler in discrete element model of sandy loam fluidity in Ma yam planting field. Trans. Chin. Soc. Agric. Eng. 2020, 36, 56–64. [Google Scholar]
- Geng, L.; Zuo, J.; Lu, F.; Jin, X.; Sun, C.; Ji, J. Calibration and experimental validation of contact parameters for oat seeds for discrete element method simulations. Appl. Eng. Agric. 2021, 37, 605–614. [Google Scholar] [CrossRef]
- Wang, L.; Fan, S.; Cheng, H.; Meng, H.; Shen, Y.; Wang, J.; Zhou, H. Calibration of contact parameters for pig manure based on EDEM. Trans. Chin. Soc. Agric. Eng. 2020, 36, 95–102. [Google Scholar]
- Sun, S. Simulation on the Repose Angle of Granular Materials Using Discrete Element Method. Master’s thesis, Hunan University, Changsha, China, 2020. [Google Scholar]
- Di Renzo, A.; Di Maio, F. Comparison of contact-force models for the simulation of collisions in DEM-based granular flow codes. Chem. Eng. Sci. 2004, 59, 525–541. [Google Scholar] [CrossRef]
- Malone, K.F.; Xu, B.H. Determination of contact parameters for discrete element method simulations of granular systems. Particuology 2008, 6, 521–528. [Google Scholar] [CrossRef]
- Johnson, K.L. Contact Mechanics; Cambridge University Press: Cambridge, UK, 1985; pp. 96–119. [Google Scholar]
- Jiang, D.; Chen, X.; Yan, L.; Mo, Y.; Yang, S. Design and experiment on spiral impurity cleaning device for profile modeling residual plastic film collector. Trans. Chin. Soc. Agric. Machin. 2019, 50, 137–145. [Google Scholar]
- Feng, D.; Zhao, J. Anatomical structure and basic density of Gossypium Hirsutum stalks. J. Northwest Forest. Univ. 2010, 25, 160–162. [Google Scholar]
- Feng, X.; Wang, L.; An, Z.; Hu, F.; Xu, G. Correlations between shearing force and nutrient contents of cotton stem. Chin. J. Anim. Nutr. 2016, 28, 3585–3589. [Google Scholar]
- Zhang, T.; Liu, F.; Zhao, M.; Liu, Y.; Li, F.; Ma, Q.; Zhang, Y.; Zhou, P. Measurement of physical parameters of contact between soybean seed and seed metering device and discrete element simulation calibration. J. China Agric. Univ. 2017, 22, 86–92. [Google Scholar]
- Ucgul, M.; Fielke, J.; Saunders, C. Three-dimensional discrete element modelling of tillage: Determination of a suitable contact model and parameters for a cohesionless soil. Biosyst. Eng. 2014, 121, 105–117. [Google Scholar] [CrossRef]
- Tian, Y.; Yao, Z.; Ouyang, S.; Zhao, L.; Meng, H.; Hou, S. Physical and chemical characterization of biomass crushed straw. Trans. Chin. Soc. Agric. Machin. 2011, 42, 124–128. [Google Scholar]
- Reng, L. Experimental Design and Optimisation, 2nd ed.; Science Press: Beijing, China, 2015; pp. 246–265. [Google Scholar]
- Douglas, C.M. Design and Analysis of Experiments, 6th ed.; Posts & Telecom Press: Beijing, China, 2009; pp. 354–372. [Google Scholar]
- Jia, H.; Deng, J.; Deng, Y.; Chen, T.; Wang, G.; Sun, Z.; Guo, H. Contact parameter analysis and calibration in discrete element simulation of rice straw. Int. J. Agric. Biol. Eng. 2021, 14, 72–81. [Google Scholar] [CrossRef]
- Bai, S.; Yang, Q.; Niu, K.; Zhao, B.; Zhou, L.; Yuan, Y. Discrete element-based optimization parameters of an experimental corn silage crushing and throwing device. Trans. ASABE 2021, 64, 1019–1026. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample | Particle Size Distribution (%) | Water Content (%) | Proportion of Mixture (%) | |||
|---|---|---|---|---|---|---|
| <1 | [1, 2) | [2, 5) | ≥5 | |||
| Soil residue | 54.33 | 12.58 | 13.84 | 19.25 | 12.64 | 89.73 |
| Cotton residue | 36.76 | 14.34 | 19.08 | 29.82 | 13.23 | 10.27 |
| Contact Parameters | Value |
|---|---|
| Soil PMMA static friction coefficient | 0.3 |
| Soil PMMA rolling friction coefficient | 0.05 |
| Soil PMMA collision recovery coefficient | 0.4 |
| Cotton residue PMMA static friction coefficient | 0.45 |
| Cotton residue PMMA rolling friction coefficient | 0.1 |
| Cotton residue PMMA collision recovery coefficient | 0.3 |
| Parameter Symbols | Parameters | Parameter Levels | ||
|---|---|---|---|---|
| −1 | 0 | +1 | ||
| T1 | Coefficient of recovery friction between soil and soil | 0.2 | 0.3 | 0.4 |
| T2 | Coefficient of static friction between soil and soil | 0.2 | 0.25 | 0.3 |
| T3 | Coefficient of rolling friction between soil and soil | 0.05 | 0.075 | 0.1 |
| T4 | Coefficient of recovery friction between cotton residue and cotton residue | 0.4 | 0.45 | 0.5 |
| T5 | Coefficient of static friction between cotton residue and cotton residue | 0.35 | 0.4 | 0.45 |
| T6 | Coefficient of rolling friction between cotton residue and cotton residue | 0.1 | 0.125 | 0.15 |
| T7 | Coefficient of recovery friction between soil and cotton residue | 0.3 | 0.4 | 0.5 |
| T8 | Coefficient of static friction between soil and cotton residue | 0.4 | 0.5 | 0.6 |
| T9 | Coefficient of rolling friction between soil and cotton residue | 0.1 | 0.15 | 0.2 |
| T10, T11 | Virtual parameters | —— | —— | —— |
| Test Serial Number | Parameters | Dynamic Angle of Repose σ/(°) | Relative Error ε/(%) | ||
|---|---|---|---|---|---|
| T2 | T3 | T5 | |||
| 1 | 0.1 | 0.05 | 0.1 | 27.72 | 32.91% |
| 2 | 0.2 | 0.10 | 0.2 | 36.35 | 12.03% |
| 3 | 0.3 | 0.15 | 0.3 | 42.25 | 2.25% |
| 4 | 0.4 | 0.20 | 0.4 | 45.88 | 11.04% |
| 5 | 0.5 | 0.25 | 0.5 | 48.92 | 18.39% |
| Code | Coefficient of Static Friction between Soil and Soil (T2) | Coefficient of Rolling Friction between Soil and Soil (T3) | Coefficient of Static Friction between Cotton Residue and Cotton Residue (T5) |
|---|---|---|---|
| +1 | 0.3 | 0.05 | 0.35 |
| 0 | 0.4 | 0.10 | 0.4 |
| −1 | 0.5 | 0.15 | 0.45 |
| Test Serial Number | Parameter Notations | Results of Simulation Tests σ/(°) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| T1 | T2 | T3 | T4 | T5 | T6 | T7 | T8 | T9 | T10 | T11 | ||
| 1 | +1 | +1 | −1 | +1 | +1 | +1 | −1 | −1 | −1 | +1 | −1 | 36.02 |
| 2 | −1 | +1 | +1 | −1 | +1 | +1 | +1 | −1 | −1 | −1 | +1 | 40.61 |
| 3 | +1 | −1 | +1 | +1 | −1 | +1 | +1 | +1 | −1 | −1 | −1 | 36.74 |
| 4 | −1 | +1 | −1 | +1 | +1 | −1 | +1 | +1 | +1 | −1 | −1 | 36.14 |
| 5 | −1 | −1 | +1 | −1 | +1 | +1 | −1 | +1 | +1 | +1 | −1 | 36.18 |
| 6 | −1 | −1 | −1 | +1 | −1 | +1 | +1 | −1 | +1 | +1 | +1 | 36.27 |
| 7 | +1 | −1 | −1 | −1 | +1 | −1 | +1 | +1 | −1 | +1 | +1 | 33.16 |
| 8 | +1 | +1 | −1 | −1 | −1 | +1 | −1 | +1 | +1 | −1 | +1 | 37.07 |
| 9 | +1 | +1 | +1 | −1 | −1 | −1 | +1 | −1 | +1 | +1 | −1 | 40.13 |
| 10 | −1 | +1 | +1 | +1 | −1 | −1 | −1 | +1 | −1 | +1 | +1 | 39.72 |
| 11 | +1 | −1 | +1 | +1 | +1 | −1 | −1 | −1 | +1 | −1 | +1 | 36.25 |
| 12 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | 33.61 |
| 13 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 37.73 |
| 14 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 41.36 |
| 15 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 38.05 |
| Parameters | Standardized Effects | Sum of Mean Squares | Contribution Degree (%) | Significance Ranking |
|---|---|---|---|---|
| T1 | −0.53 | 0.83 | 1.05 | 7 |
| T2 | 2.91 | 25.46 | 32.00 | 1 |
| T3 | 2.89 | 25.11 | 31.57 | 2 |
| T4 | 0.063 | 0.012 | 0.015 | 9 |
| T5 | −0.86 | 2.24 | 2.81 | 3 |
| T6 | 0.65 | 1.25 | 1.58 | 5 |
| T7 | 0.70 | 1.47 | 1.85 | 4 |
| T8 | −0.65 | 1.25 | 1.58 | 6 |
| T9 | 0.36 | 0.40 | 0.50 | 8 |
| Code | Coefficient of Static Friction between Soil and Soil (T2) | Coefficient of Rolling Friction between Soil and Soil (T3) | Coefficient of Static Friction between Cotton Residue and Cotton Residue (T5) |
|---|---|---|---|
| +1 | 0.3 | 0.05 | 0.35 |
| 0 | 0.4 | 0.10 | 0.4 |
| −1 | 0.5 | 0.15 | 0.45 |
| Test Serial Number | T2 | T3 | T5 | Dynamic Angle of Repose σ/(°) |
|---|---|---|---|---|
| 1 | −1 | −1 | 0 | 31.7 |
| 2 | +1 | −1 | 0 | 34.8 |
| 3 | −1 | +1 | 0 | 38.33 |
| 4 | +1 | +1 | 0 | 47.46 |
| 5 | −1 | 0 | −1 | 38.25 |
| 6 | +1 | 0 | −1 | 44.18 |
| 7 | −1 | 0 | +1 | 36.61 |
| 8 | +1 | 0 | +1 | 42.35 |
| 9 | 0 | −1 | −1 | 36.63 |
| 10 | 0 | +1 | −1 | 43.27 |
| 11 | 0 | −1 | +1 | 34.38 |
| 12 | 0 | +1 | +1 | 43.21 |
| 13 | 0 | 0 | 0 | 40.08 |
| 14 | 0 | 0 | 0 | 42.05 |
| 15 | 0 | 0 | 0 | 41.65 |
| 16 | 0 | 0 | 0 | 40.31 |
| 17 | 0 | 0 | 0 | 41.16 |
| Source of Variance | Sum of Squares | Degree of Freedom | Mean Square | F-Value | p-Value |
|---|---|---|---|---|---|
| Model | 261.34 | 9 | 29.04 | 43.40 | ¢0.0001 ** |
| T2 | 70.21 | 1 | 70.21 | 104.95 | ¢0.0001 ** |
| T3 | 149.30 | 1 | 149.30 | 223.17 | ¢0.0001 ** |
| T5 | 4.18 | 1 | 4.18 | 6.24 | 0.0411 * |
| T2T3 | 8.50 | 1 | 8.50 | 12.70 | 0.0092 ** |
| T2T5 | 9.025 × 10−3 | 1 | 9.025 × 10−3 | 0.013 | 0.9108 |
| T3T5 | 4.39 | 1 | 4.39 | 6.56 | 0.0375 * |
| T22 | 2.54 | 1 | 2.54 | 3.79 | 0.0925 |
| T32 | 21.34 | 1 | 21.34 | 31.90 | 0.0008 ** |
| T52 | 0.023 | 1 | 0.023 | 0.034 | 0.8585 |
| Residual | 4.68 | 7 | 0.67 | ||
| Lack of fit | 1.82 | 3 | 0.61 | 0.85 | 0.5348 Not significant |
| Pure error | 2.86 | 4 | 0.72 | ||
| Total | 266.02 | 16 | |||
| R2 = 0.9824; R2adj = 0.9598; CV = 2.06% | |||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, P.; Li, Y.; Liang, R.; Zhang, B.; Kan, Z. Calibration of Contact Parameters for Particulate Materials in Residual Film Mixture after Sieving Based on EDEM. Agriculture 2023, 13, 959. https://doi.org/10.3390/agriculture13050959
Zhou P, Li Y, Liang R, Zhang B, Kan Z. Calibration of Contact Parameters for Particulate Materials in Residual Film Mixture after Sieving Based on EDEM. Agriculture. 2023; 13(5):959. https://doi.org/10.3390/agriculture13050959
Chicago/Turabian StyleZhou, Pengfei, Yaping Li, Rongqing Liang, Bingcheng Zhang, and Za Kan. 2023. "Calibration of Contact Parameters for Particulate Materials in Residual Film Mixture after Sieving Based on EDEM" Agriculture 13, no. 5: 959. https://doi.org/10.3390/agriculture13050959