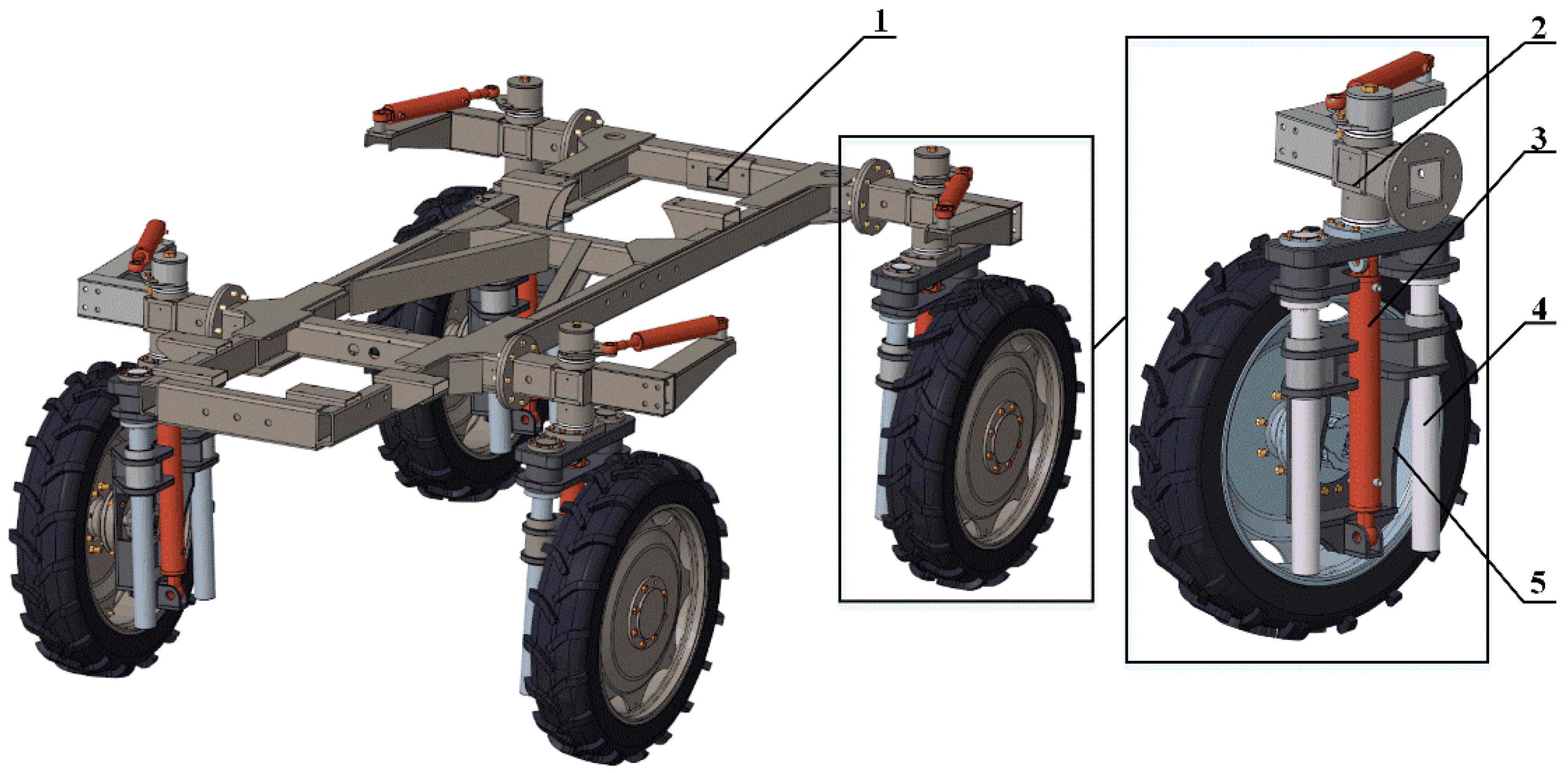
Figure 1.
Design of sprayer hydro-pneumatic suspension chassis: (1) the frame, (2) the steering system, (3) the hydro-pneumatic suspension hydraulic cylinder, (4) the guide mechanism and (5) connecting housing of hydro-pneumatic suspension.
Figure 1.
Design of sprayer hydro-pneumatic suspension chassis: (1) the frame, (2) the steering system, (3) the hydro-pneumatic suspension hydraulic cylinder, (4) the guide mechanism and (5) connecting housing of hydro-pneumatic suspension.
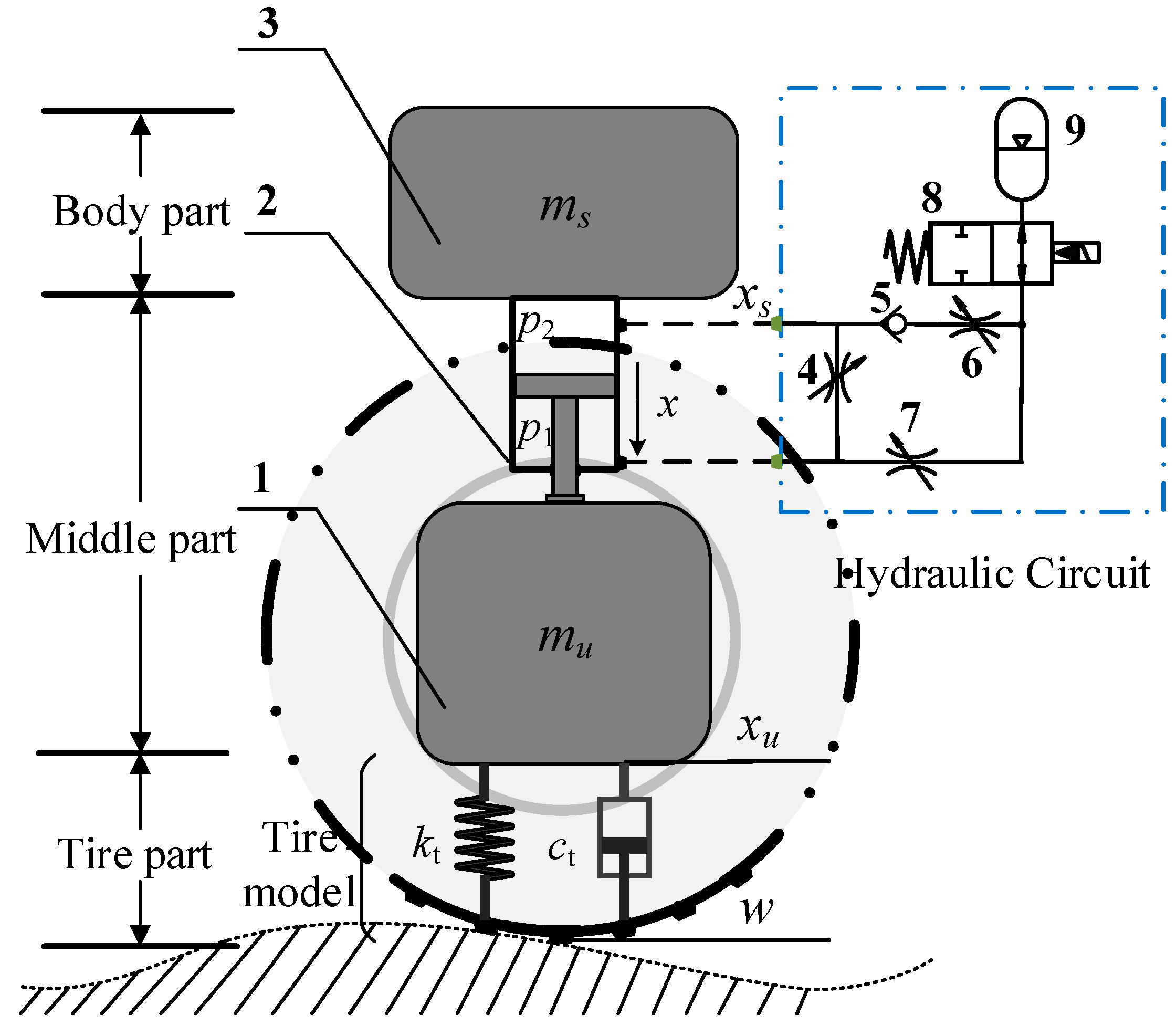
Figure 2.
Quarter hydro-pneumatic suspension model: (1) unsprung mass, (2) hydraulic cylinder, (3) sprung mass, (4) damping hole, (5) check valve, (6) damping hole, (7) damping hole, (8) electromagnetic on-off valve and (9) accumulator.
Figure 2.
Quarter hydro-pneumatic suspension model: (1) unsprung mass, (2) hydraulic cylinder, (3) sprung mass, (4) damping hole, (5) check valve, (6) damping hole, (7) damping hole, (8) electromagnetic on-off valve and (9) accumulator.
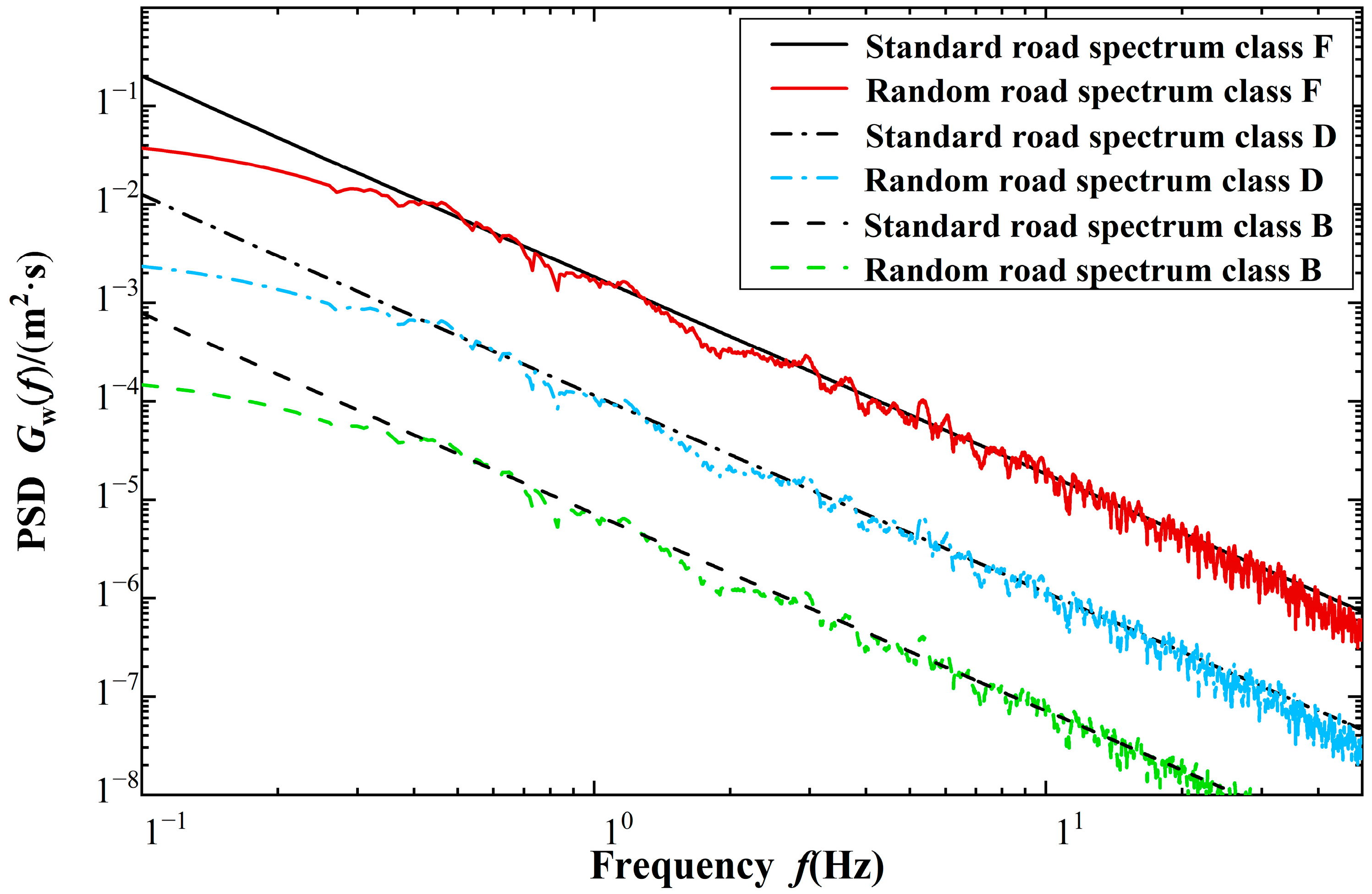
Figure 3.
Comparison of PSD curve between random road and standard road.
Figure 3.
Comparison of PSD curve between random road and standard road.
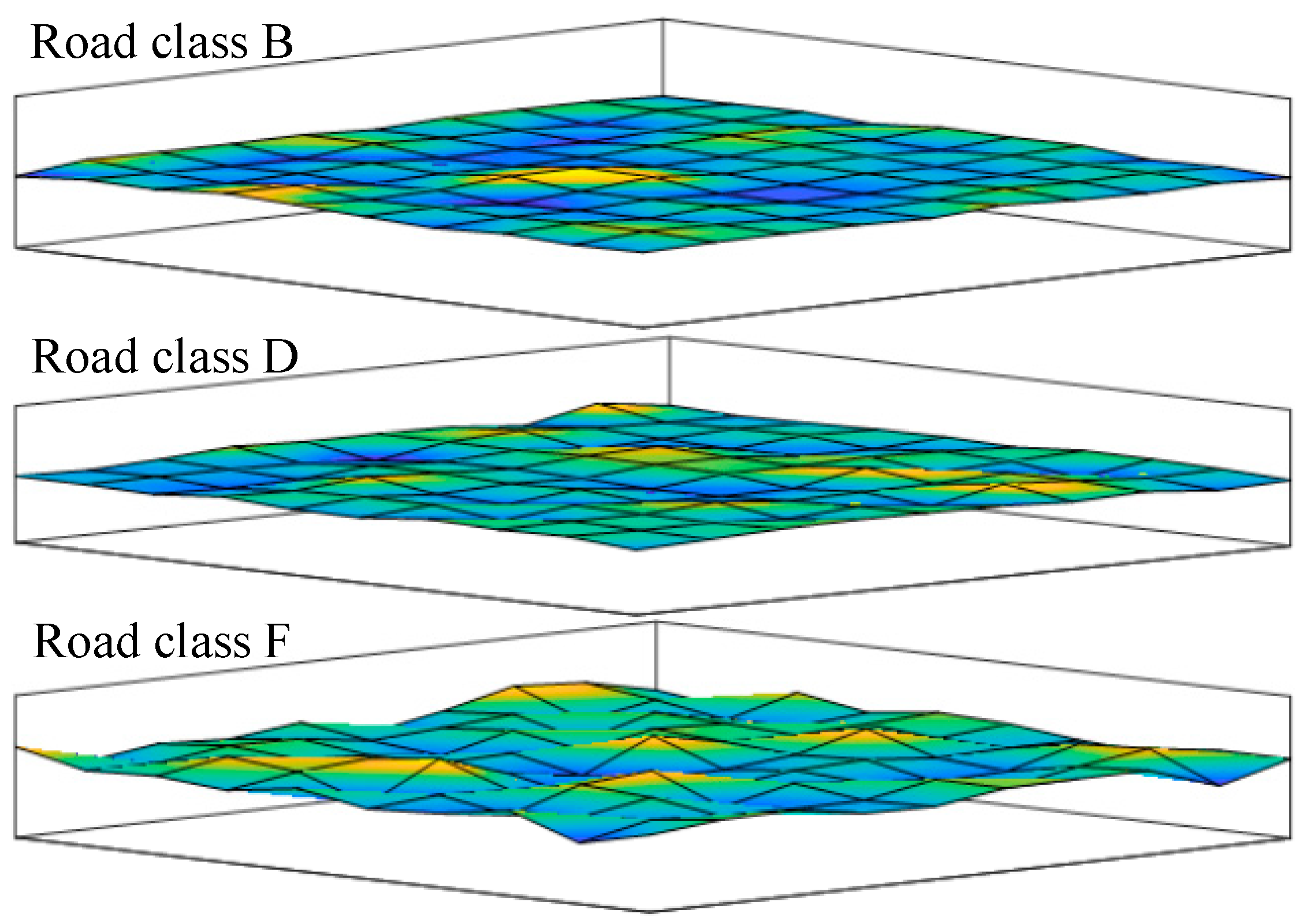
Figure 4.
Representation of the random surfaces for road classes B, D and F.
Figure 4.
Representation of the random surfaces for road classes B, D and F.
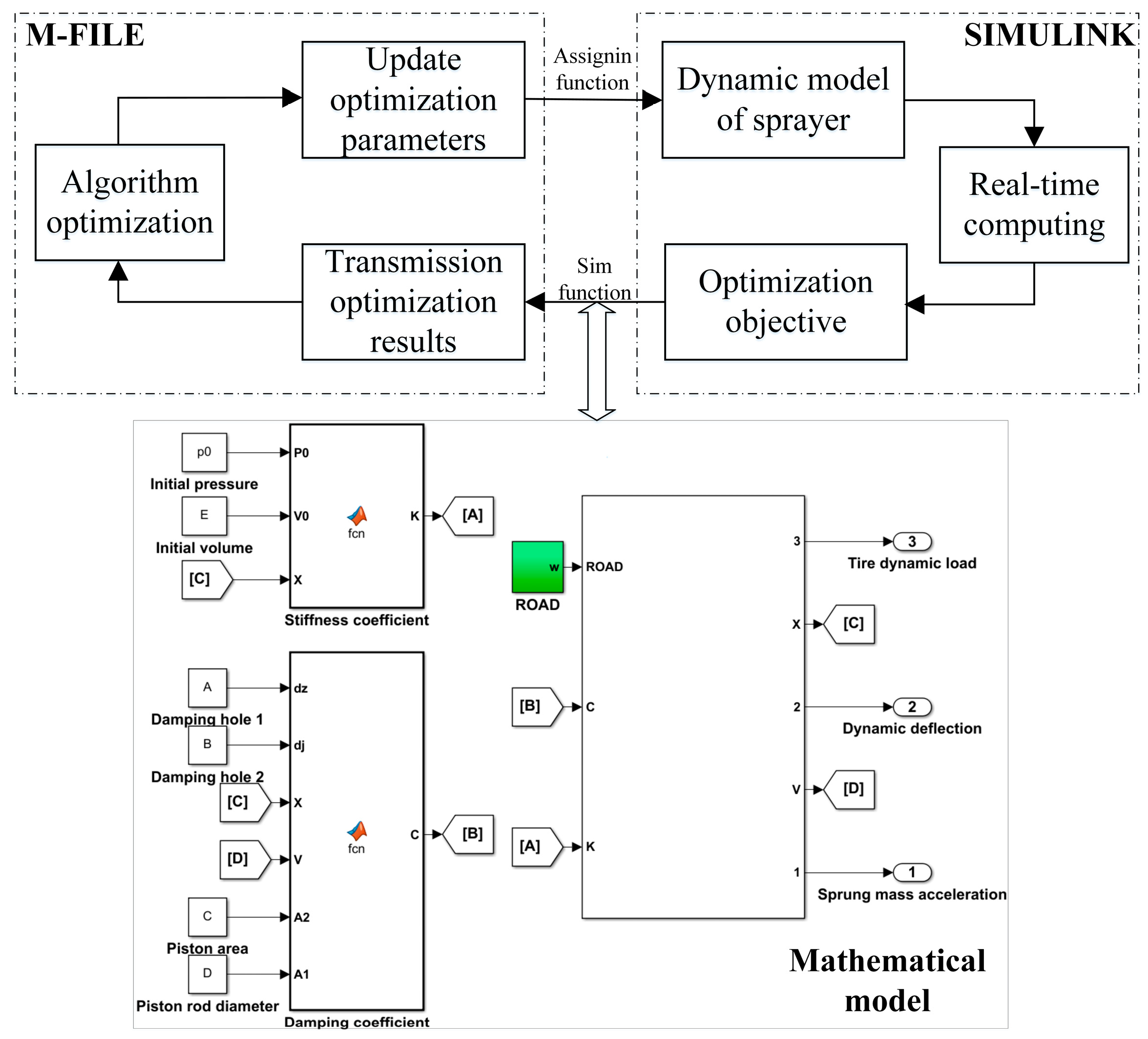
Figure 5.
Real-time time-varying model.
Figure 5.
Real-time time-varying model.
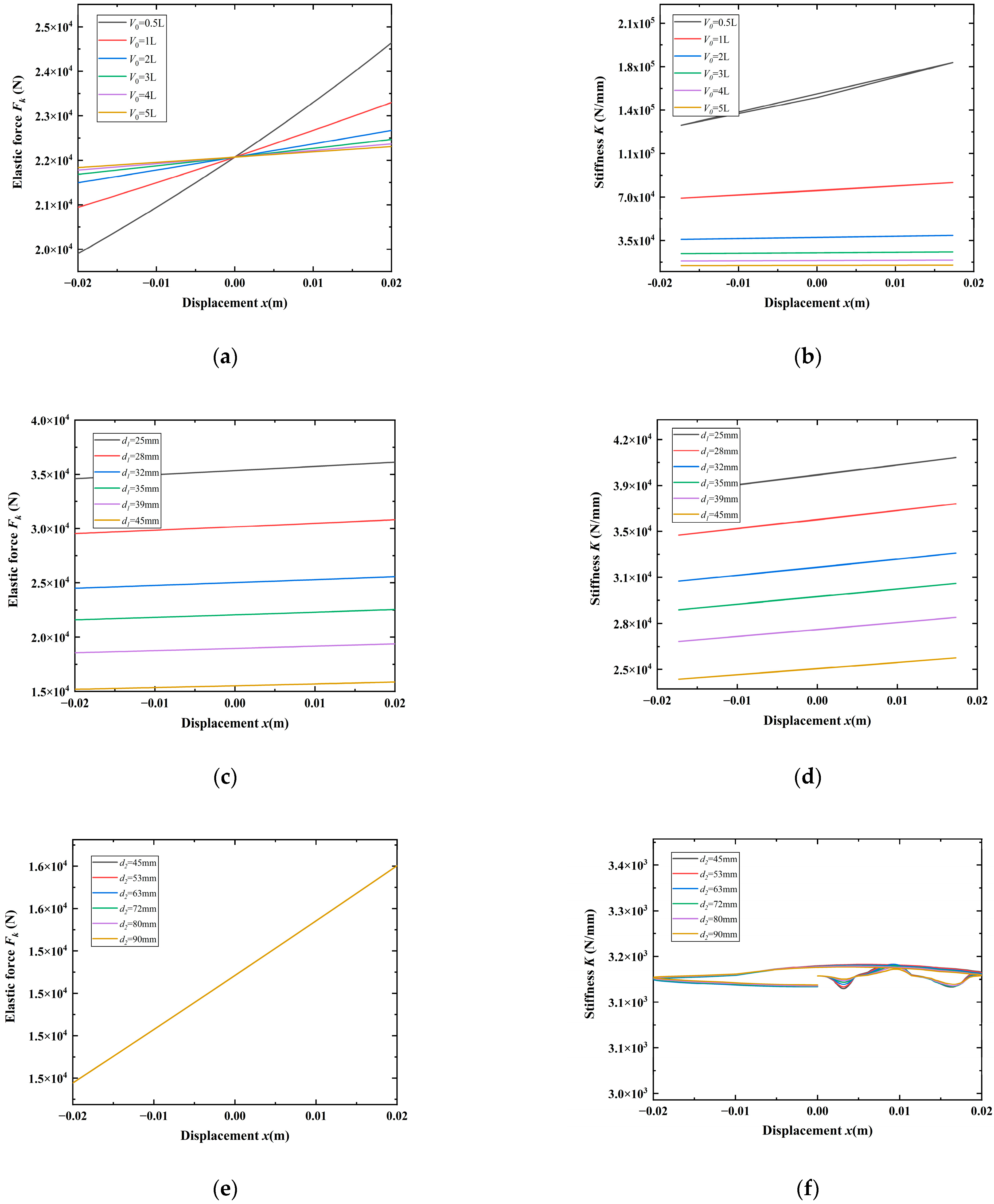
Figure 6.
Relationship between elastic force and stiffness with parameters: (a) relationship between elastic force and V0, (b) relationship between stiffness and V0, (c) relationship between elastic force and d1, (d) relationship between stiffness and d1, (e) relationship between elastic force and d2 and (f) relationship between stiffness and d2.
Figure 6.
Relationship between elastic force and stiffness with parameters: (a) relationship between elastic force and V0, (b) relationship between stiffness and V0, (c) relationship between elastic force and d1, (d) relationship between stiffness and d1, (e) relationship between elastic force and d2 and (f) relationship between stiffness and d2.
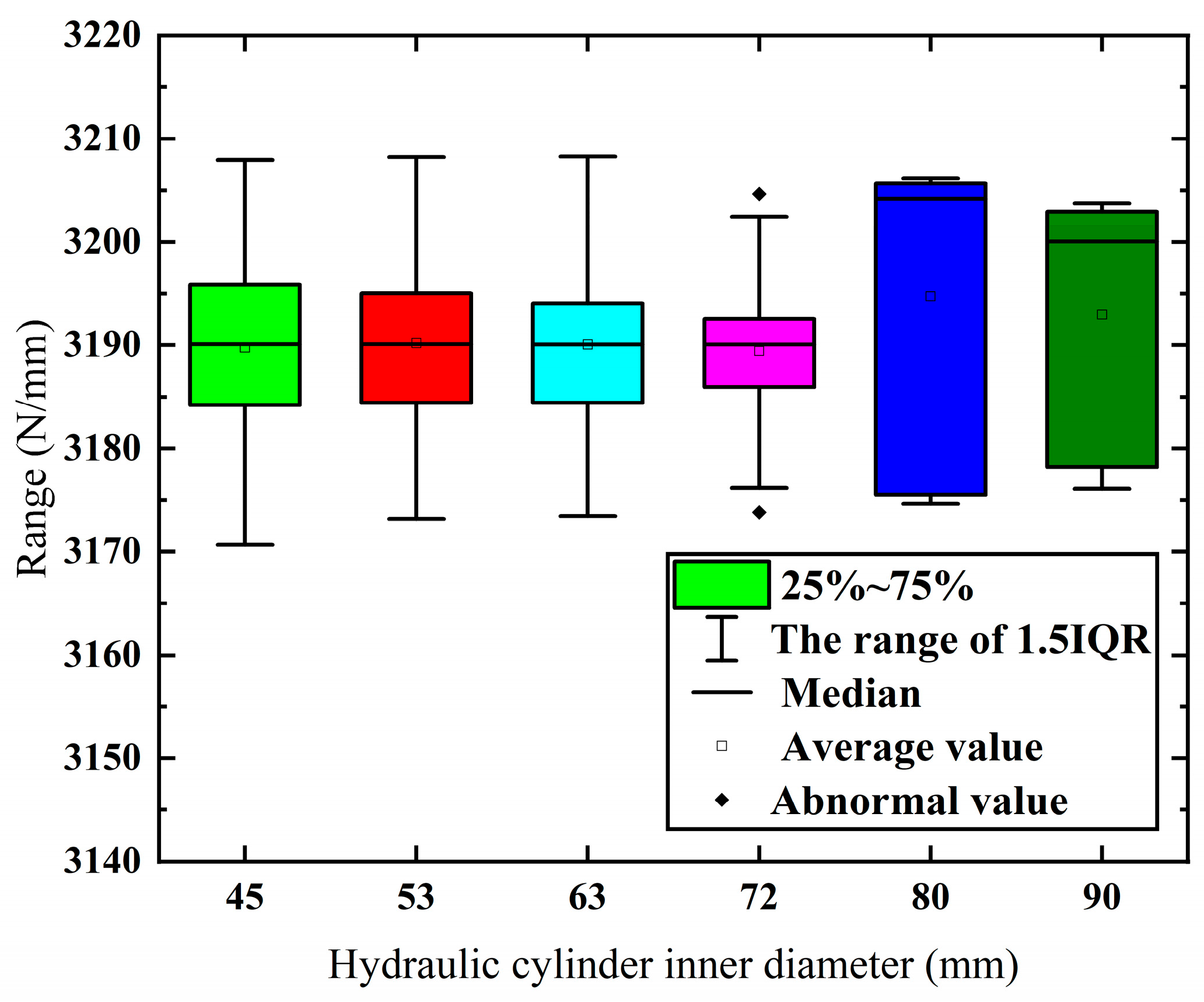
Figure 7.
Boxplot of K-W test results: The six colored lines from left to right represent the six curves in
Figure 6f, respectively.
Figure 7.
Boxplot of K-W test results: The six colored lines from left to right represent the six curves in
Figure 6f, respectively.
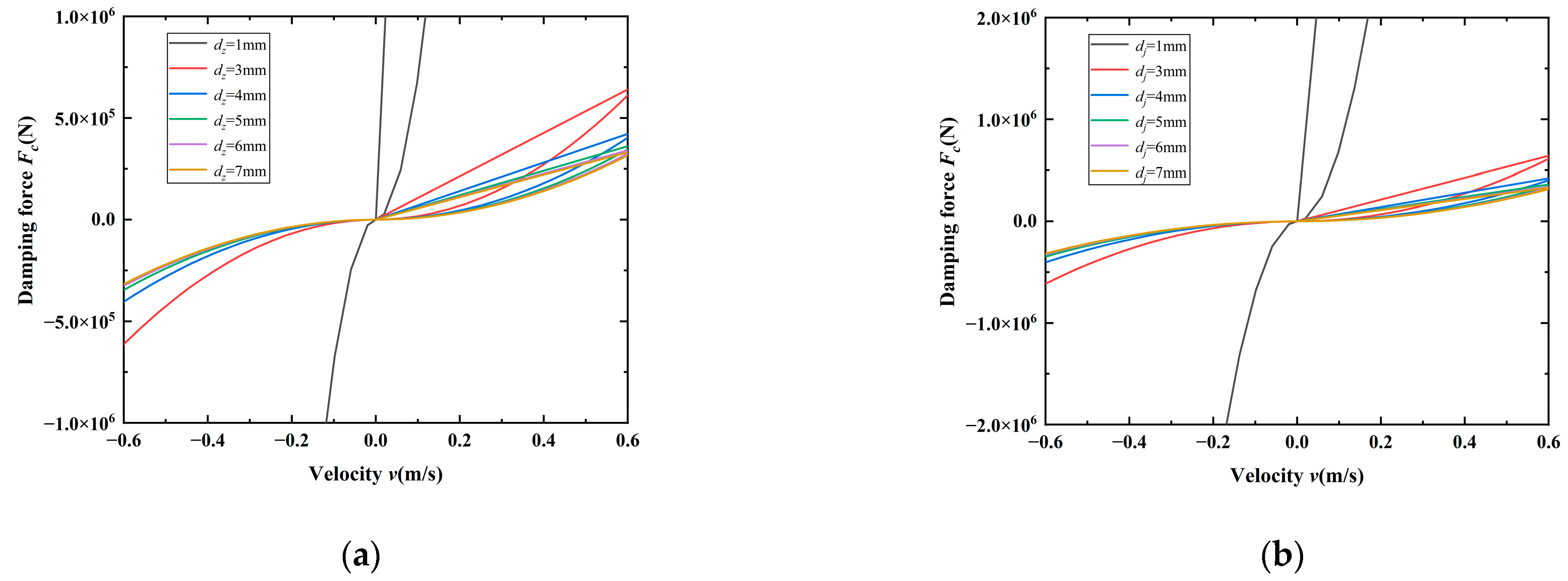
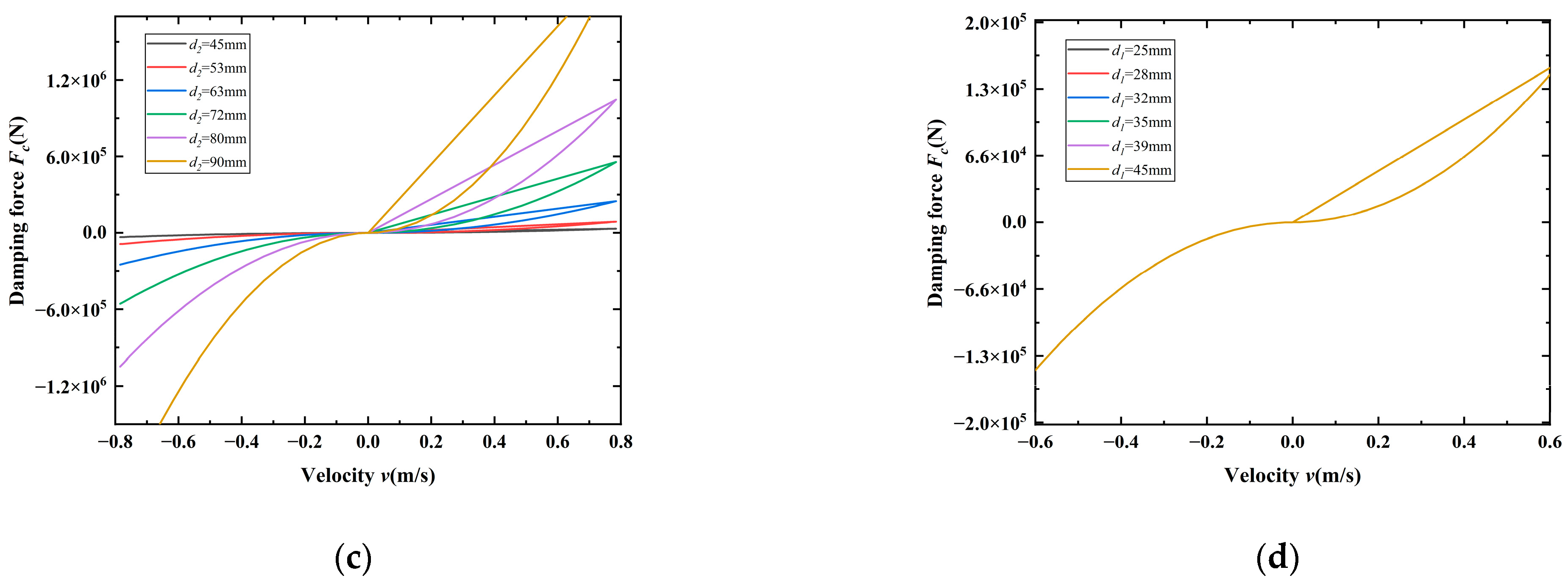
Figure 8.
Relationship between damping force and parameters: (a) relationship with dz, (b) relationship with dj, (c) relationship with d2 and (d) relationship with d1.
Figure 8.
Relationship between damping force and parameters: (a) relationship with dz, (b) relationship with dj, (c) relationship with d2 and (d) relationship with d1.
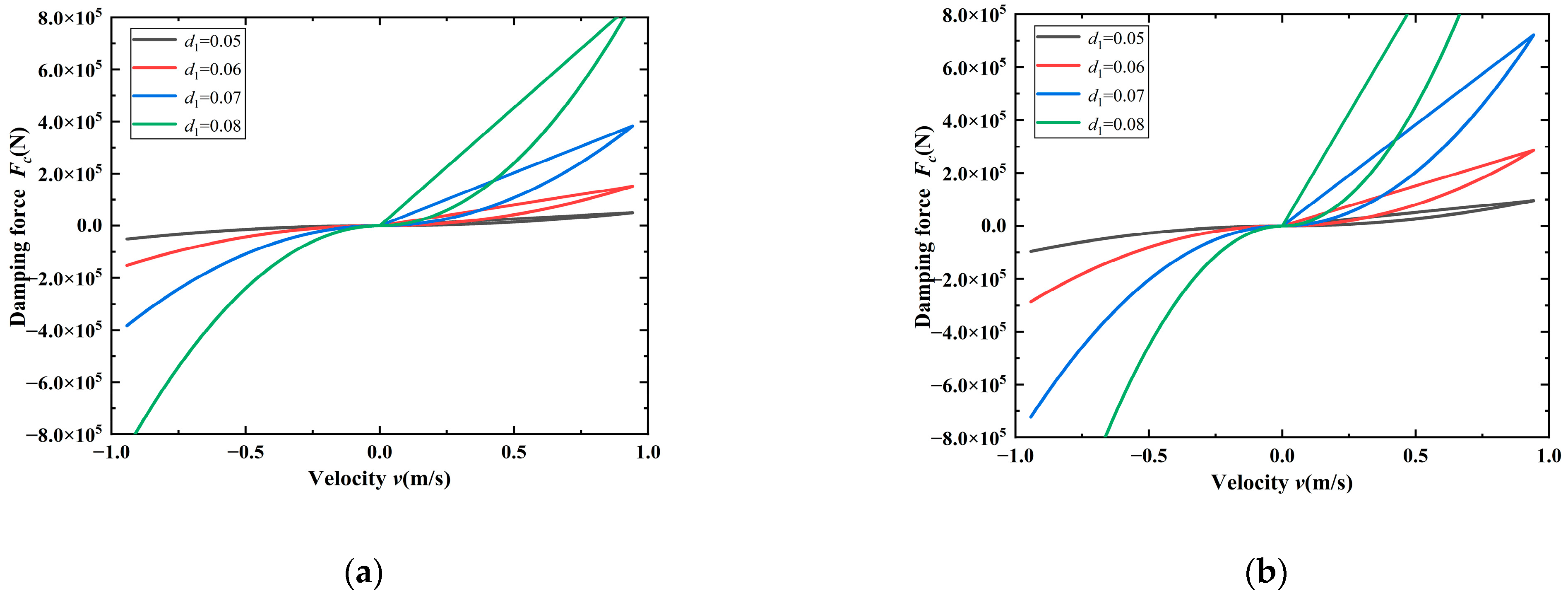
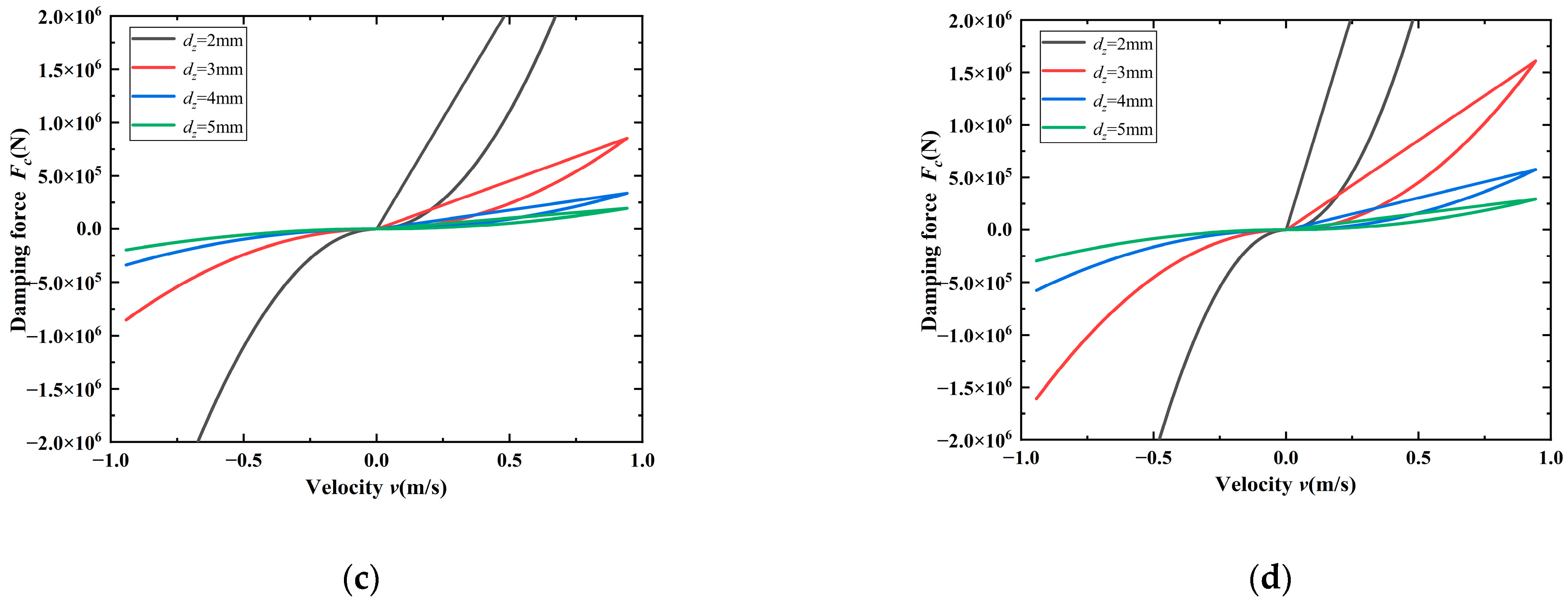
Figure 9.
Variation in damping force with parameters: (a,b) are the changing trends of the damping force of traditional hydro-pneumatic suspension and 3-damping hole hydro-pneumatic suspension with the cylinder diameter of the hydraulic cylinder; (c,d) are the changing trends of damping force of traditional hydro-pneumatic suspension and 3-damping hole hydro-pneumatic suspension with damping aperture.
Figure 9.
Variation in damping force with parameters: (a,b) are the changing trends of the damping force of traditional hydro-pneumatic suspension and 3-damping hole hydro-pneumatic suspension with the cylinder diameter of the hydraulic cylinder; (c,d) are the changing trends of damping force of traditional hydro-pneumatic suspension and 3-damping hole hydro-pneumatic suspension with damping aperture.
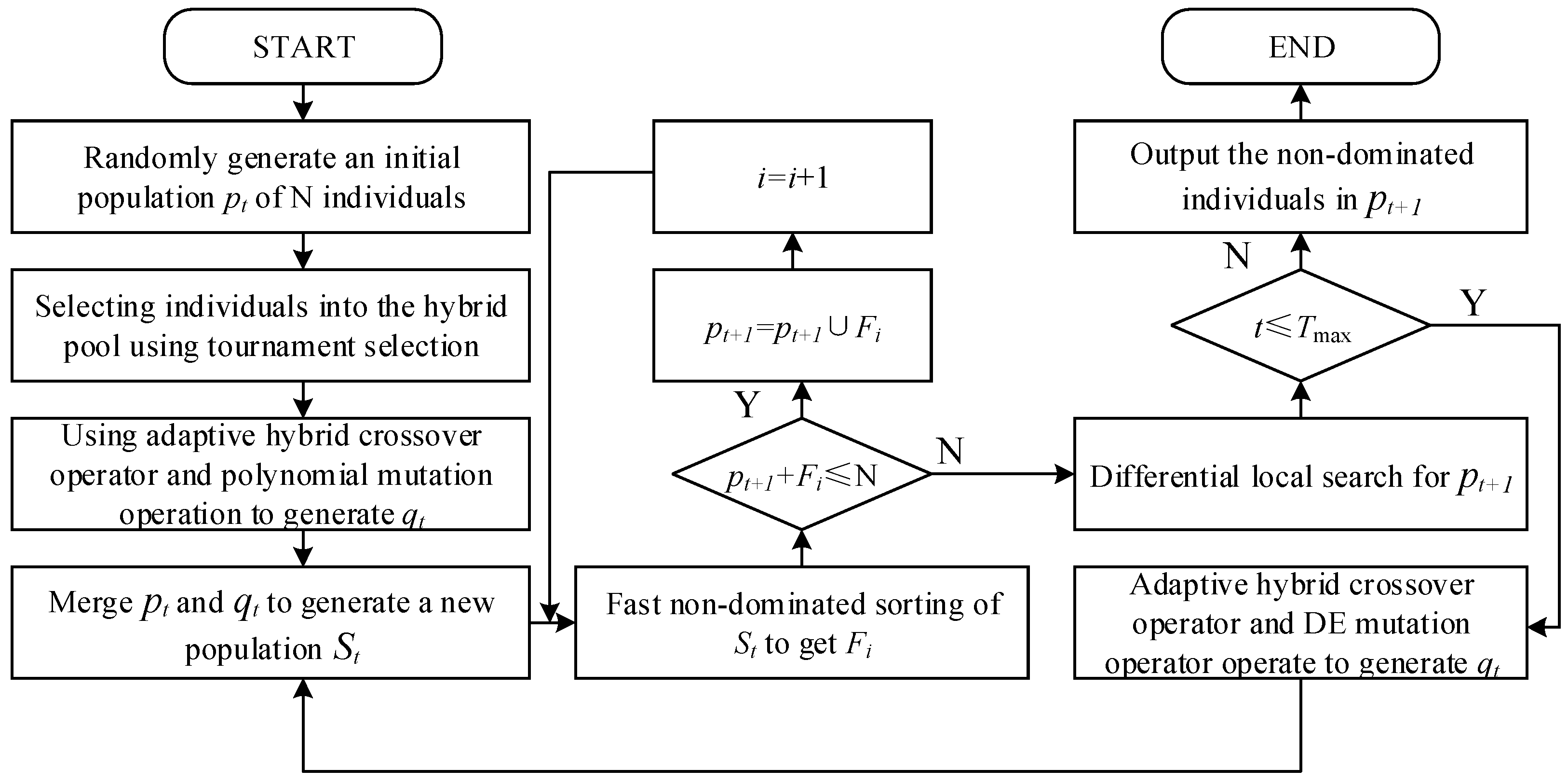
Figure 10.
Flow chart of improved algorithm.
Figure 10.
Flow chart of improved algorithm.
Figure 11.
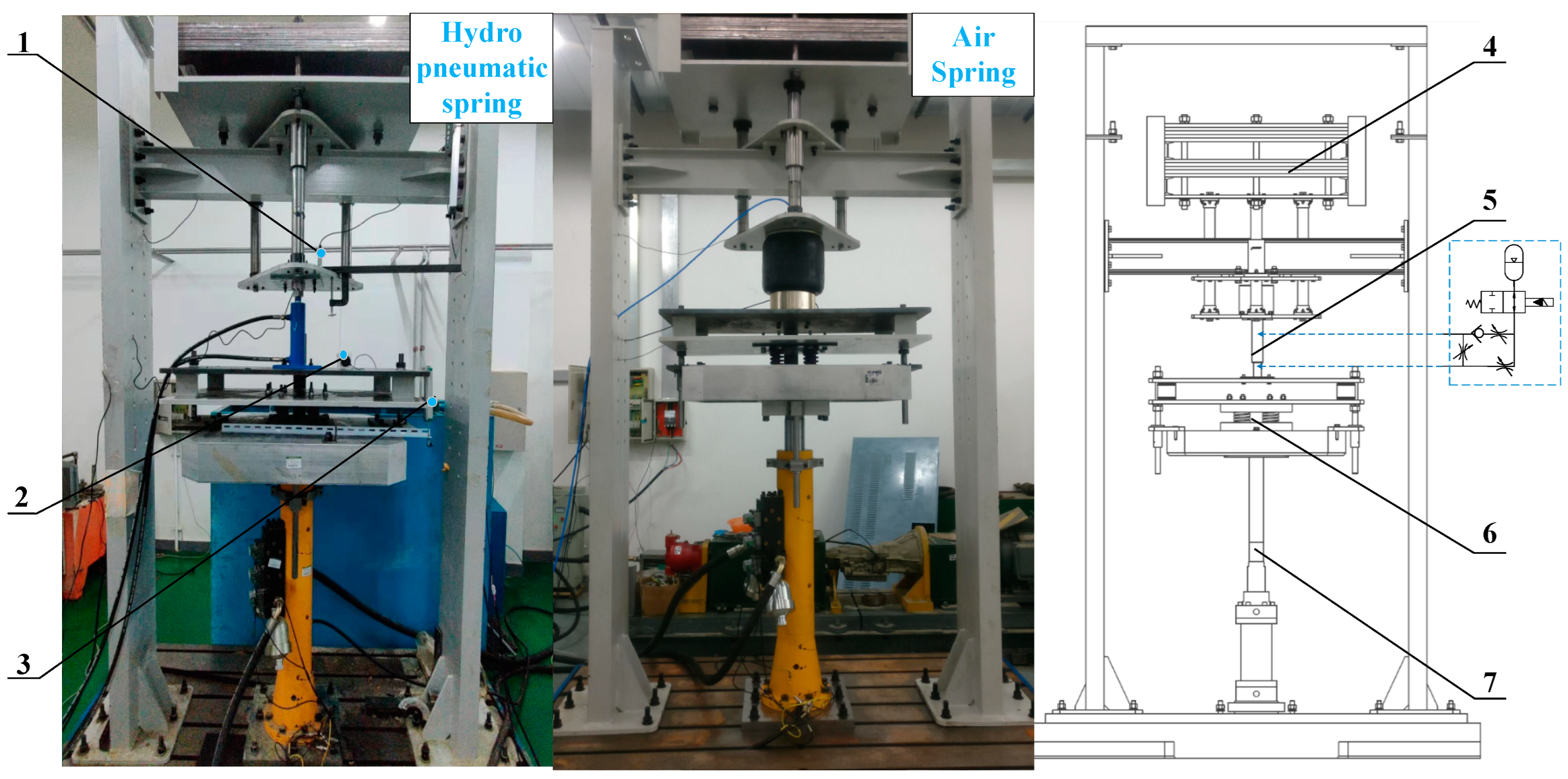
Vibration test bench based on air spring and hydro-pneumatic spring: (1) acceleration sensor, (2) displacement sensors, (3) displacement sensors, (4) steel plate, (5) hydraulic cylinder, (6) tire and (7) servo actuator.
Figure 11.
Vibration test bench based on air spring and hydro-pneumatic spring: (1) acceleration sensor, (2) displacement sensors, (3) displacement sensors, (4) steel plate, (5) hydraulic cylinder, (6) tire and (7) servo actuator.
Figure 12.
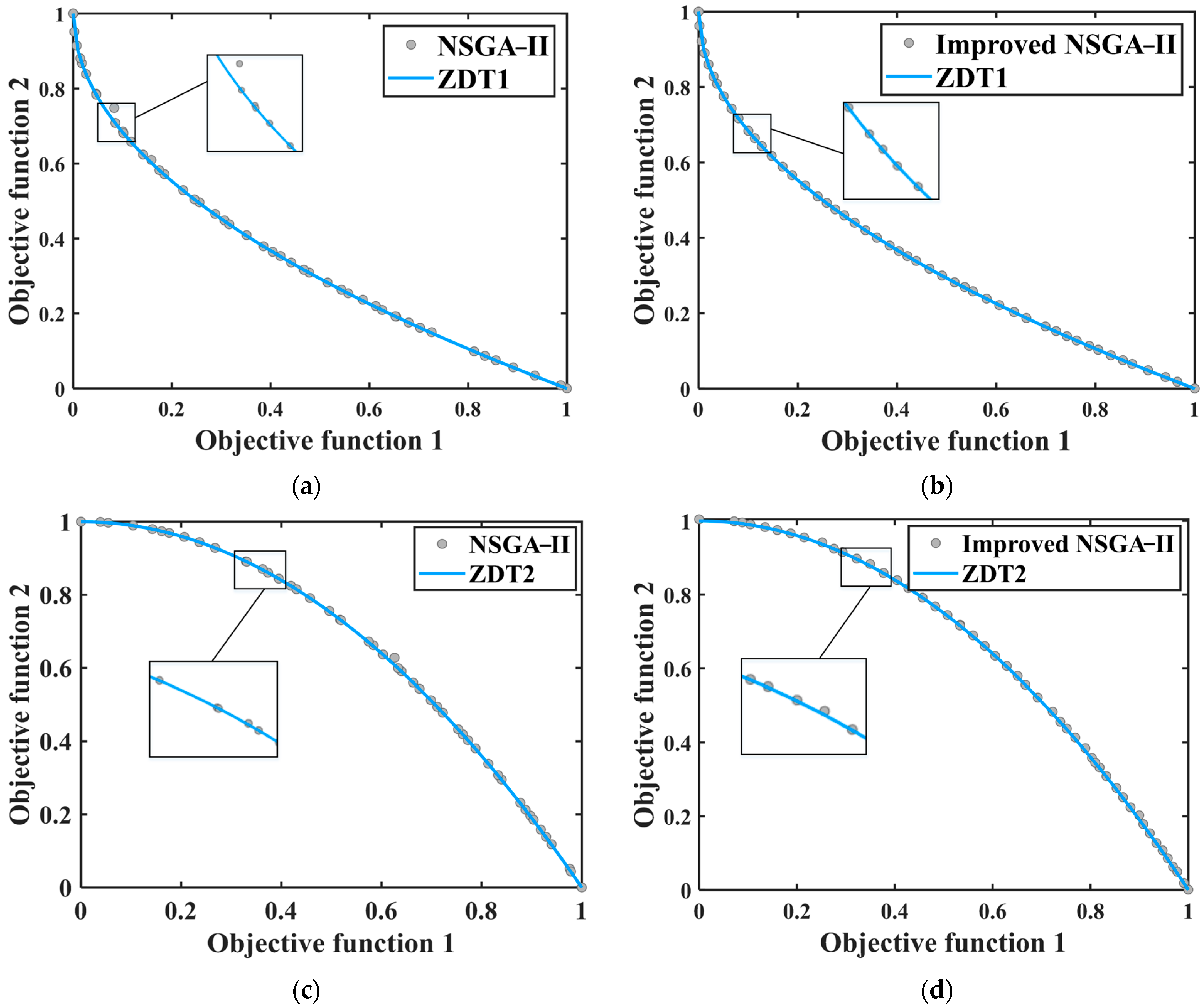
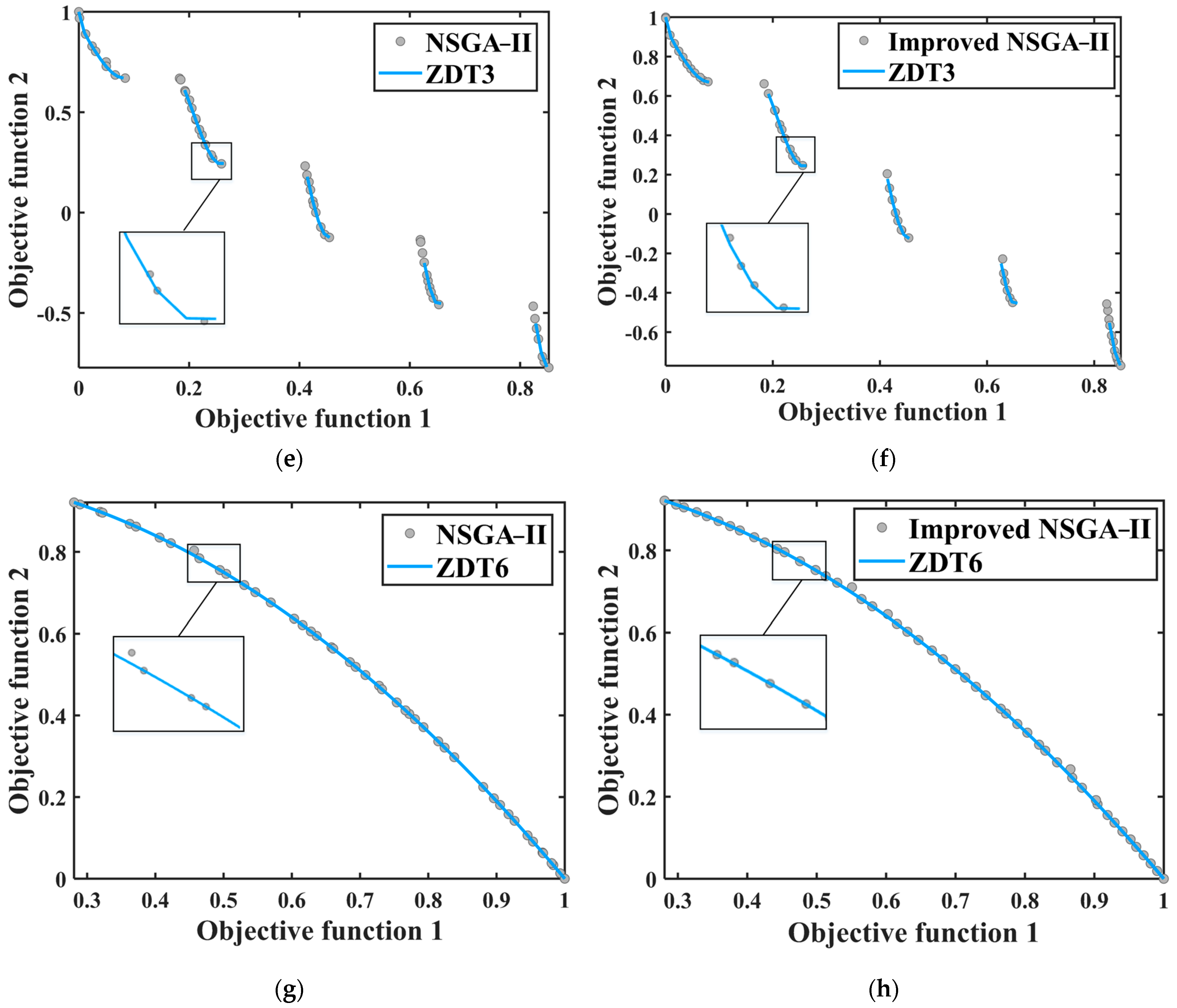
Comparison of Pareto fronts of NSGA-II and improved NSGA-II under different test functions: (a,b) are the simulation lines of the ZDT1 function before and after algorithm improvement, (c,d) are the simulation lines of the ZDT2 function before and after algorithm improvement, (e,f) are the simulation lines of the ZDT3 function before and after algorithm improvement, (g,h) are the simulation lines of the ZDT3 function before and after algorithm improvement.
Figure 12.
Comparison of Pareto fronts of NSGA-II and improved NSGA-II under different test functions: (a,b) are the simulation lines of the ZDT1 function before and after algorithm improvement, (c,d) are the simulation lines of the ZDT2 function before and after algorithm improvement, (e,f) are the simulation lines of the ZDT3 function before and after algorithm improvement, (g,h) are the simulation lines of the ZDT3 function before and after algorithm improvement.
Figure 13.
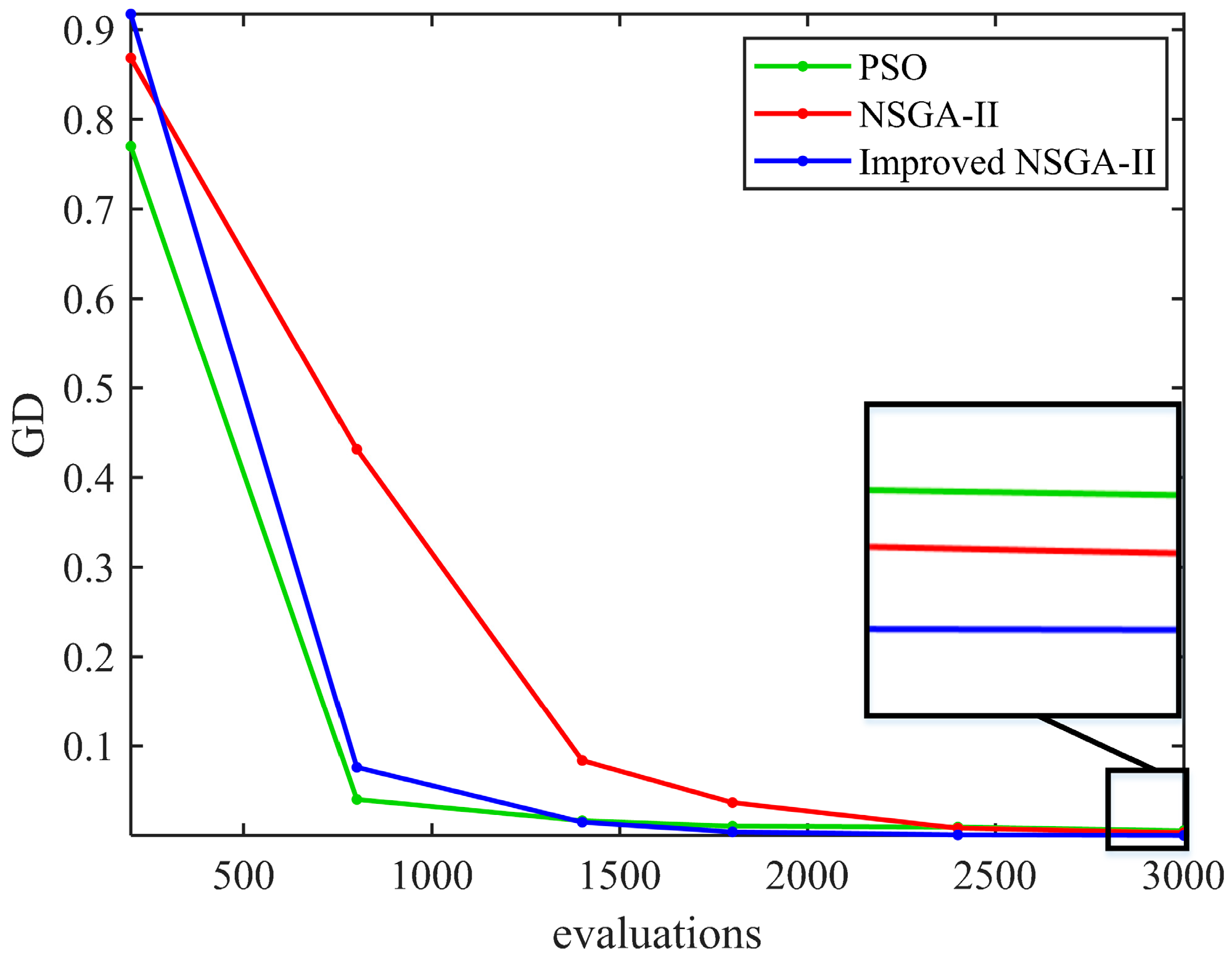
Comparison of GD values of three algorithms.
Figure 13.
Comparison of GD values of three algorithms.
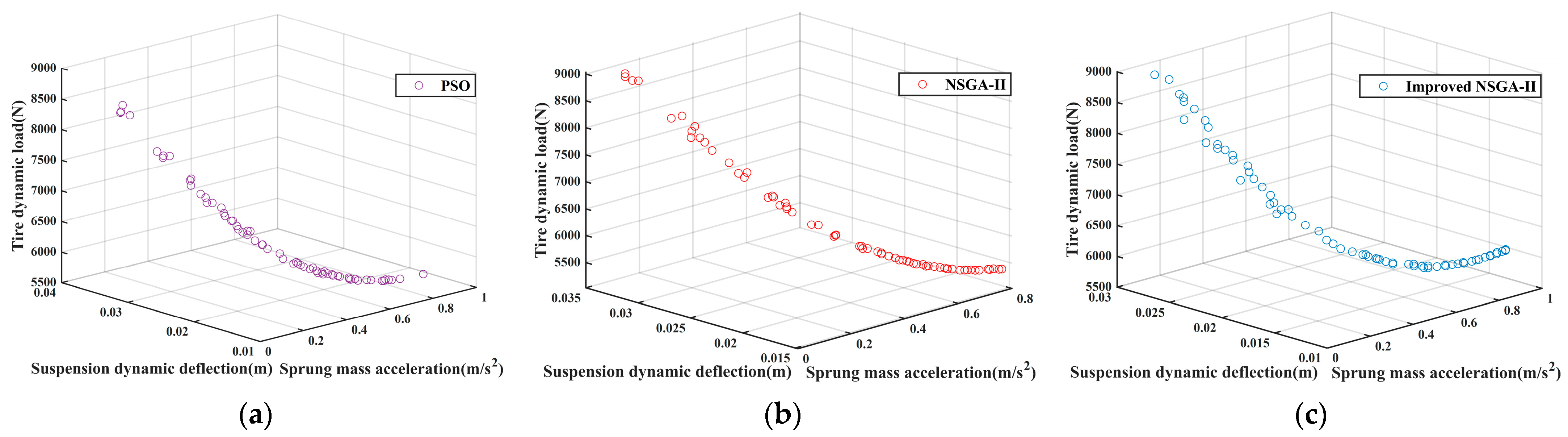
Figure 14.
Comparison of Pareto fronts of PSO, NSGA-II and improved NSGA-II: (a) is the Pareto fronts of the PSO algorithm, (b) is the Pareto fronts of the NSGA-II algorithm, (c) is the Pareto fronts of the improved NSGA-II algorithm.
Figure 14.
Comparison of Pareto fronts of PSO, NSGA-II and improved NSGA-II: (a) is the Pareto fronts of the PSO algorithm, (b) is the Pareto fronts of the NSGA-II algorithm, (c) is the Pareto fronts of the improved NSGA-II algorithm.
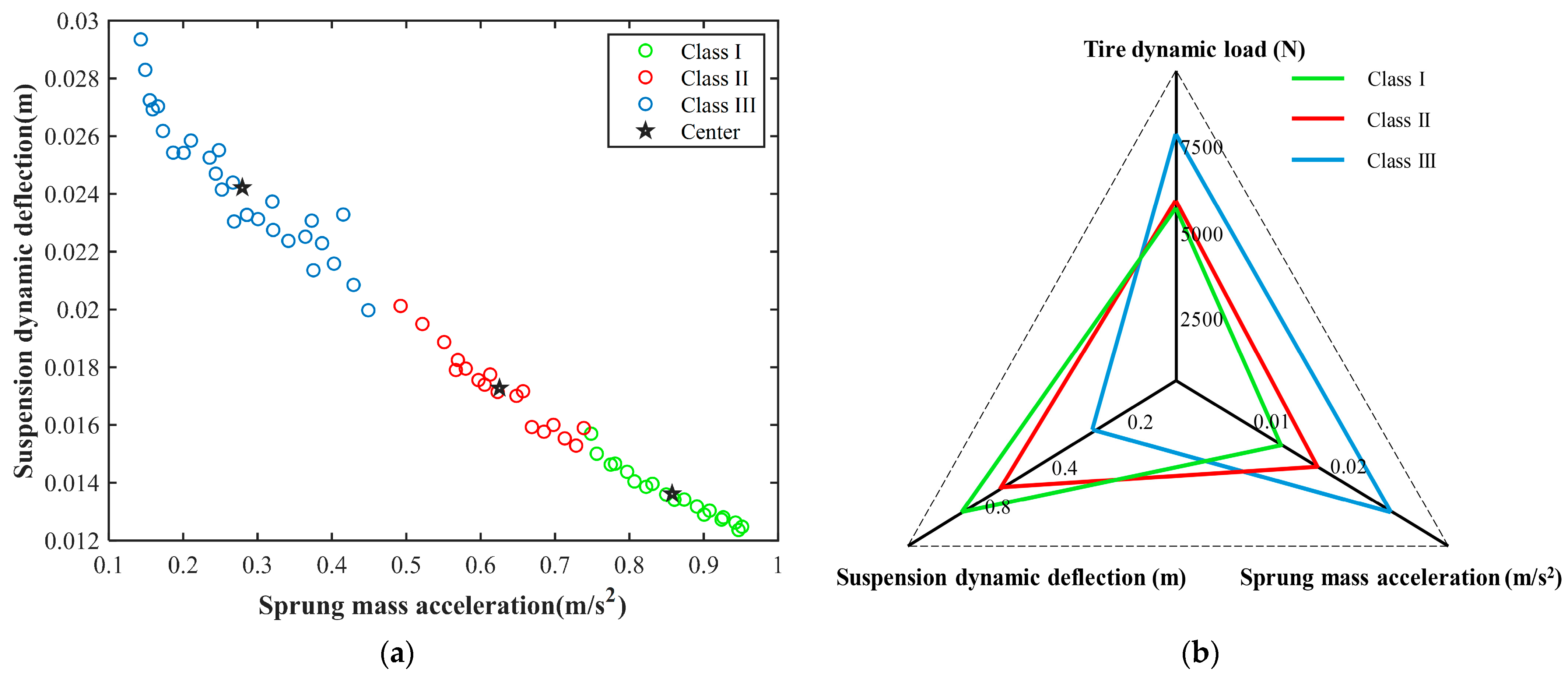
Figure 15.
K-means algorithm analysis results: (a) is the result graph of the K-means algorithm, (b) is the intuitive curve of the cluster center.
Figure 15.
K-means algorithm analysis results: (a) is the result graph of the K-means algorithm, (b) is the intuitive curve of the cluster center.
Figure 16.
Comparison of simulation results before and after parameter optimization.
Figure 16.
Comparison of simulation results before and after parameter optimization.
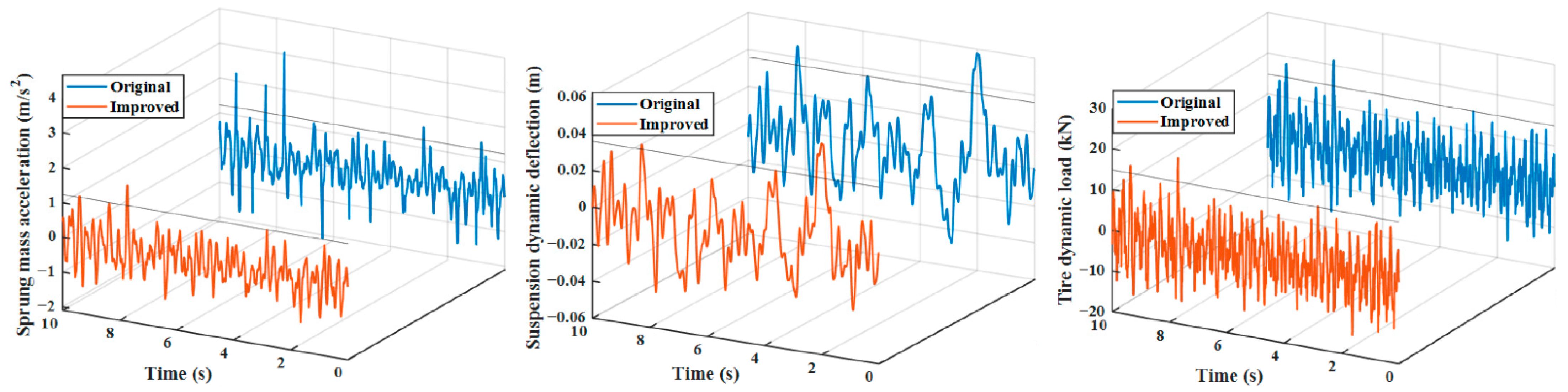
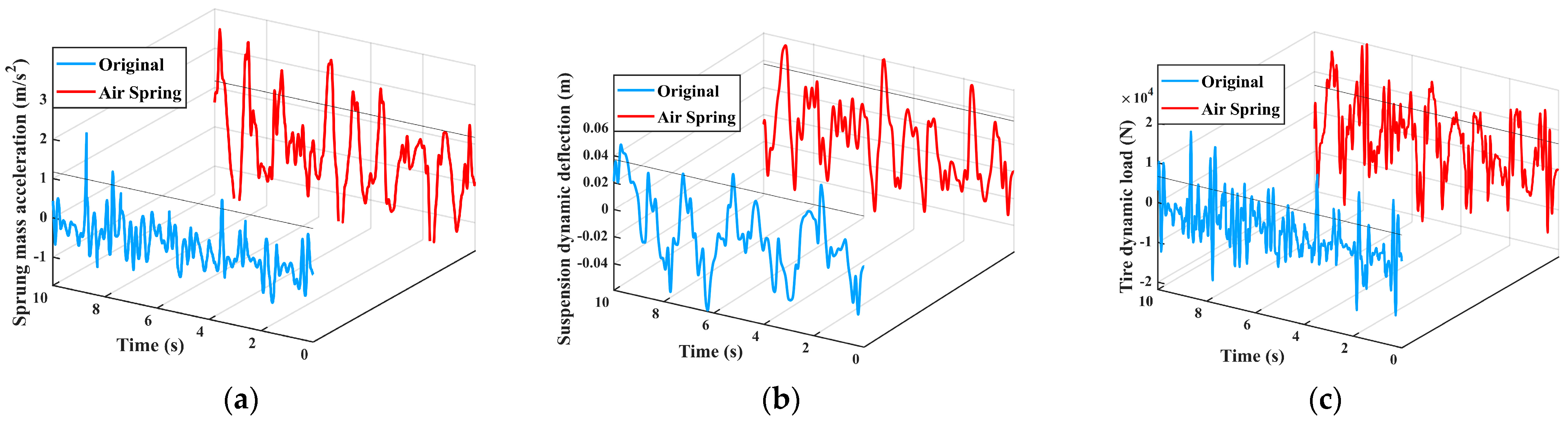
Figure 17.
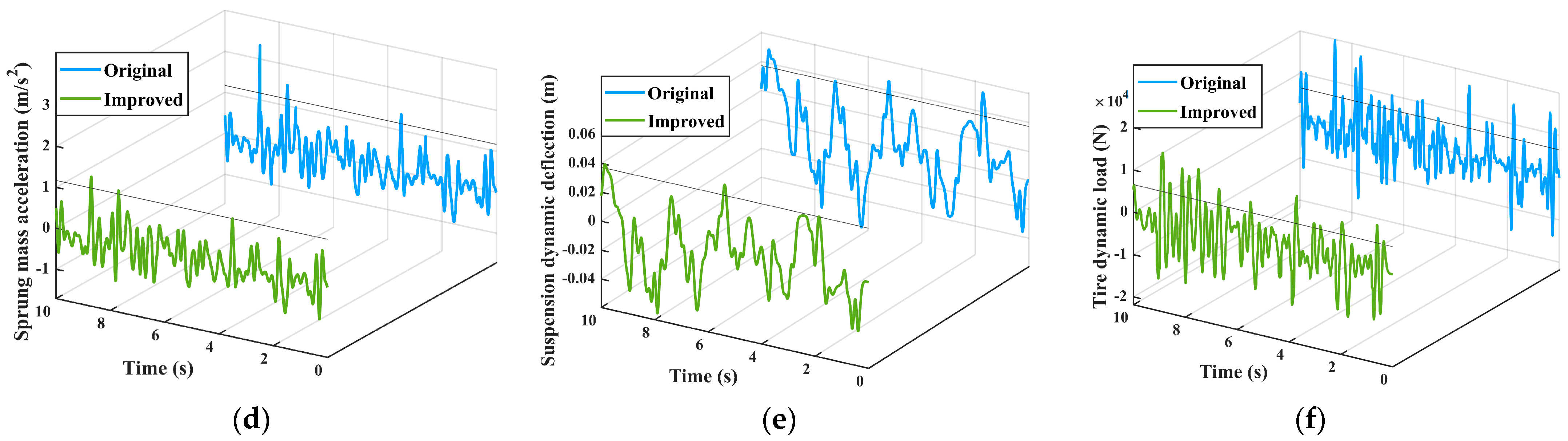
Comparison of test results of three kinds of suspension: (a–c) are the comparison between air suspension and original hydro-pneumatic suspension in terms of sprung mass acceleration, suspension dynamic deflection, and tire dynamic load, (d–f) are the comparison between the improved hydro-pneumatic suspension and the original hydro-pneumatic suspension in terms of sprung mass acceleration, suspension dynamic deflection, and tire dynamic load.
Figure 17.
Comparison of test results of three kinds of suspension: (a–c) are the comparison between air suspension and original hydro-pneumatic suspension in terms of sprung mass acceleration, suspension dynamic deflection, and tire dynamic load, (d–f) are the comparison between the improved hydro-pneumatic suspension and the original hydro-pneumatic suspension in terms of sprung mass acceleration, suspension dynamic deflection, and tire dynamic load.
Table 1.
Design parameters of hydro-pneumatic suspension.
Table 1.
Design parameters of hydro-pneumatic suspension.
| Parameter Symbol | Meaning | Numerical Value |
|---|
| ms/kg | Sprung mass of single wheel | 2400 |
| mu/kg | Unsprung mass of single wheel | 300 |
| d1/mm | Piston rod diameter | 35 |
| d2/mm | Inner diameter of hydraulic cylinder | 63 |
| dz/mm | Diameter of damping hole 4 | 3 |
| dj/mm | Diameter of damping holes 6 and 7 | 3 |
| P0/MPa | Initial pressure of accumulator | 12 |
| V0/L | Initial volume of accumulator | 2.5 |
| S/mm | Hydraulic cylinder stroke | 600 |
Table 2.
Simulation values compared with standard values.
Table 2.
Simulation values compared with standard values.
| Road Class | Mean Square Error σw × 10−3 m |
|---|
| Standard Value | 40 km/h |
|---|
| B | 7.61 | 7.91 |
| D | 30.45 | 31.07 |
| F | 121.80 | 119.63 |
Table 3.
Optimization range of parameters.
Table 3.
Optimization range of parameters.
| Parameter | Lower Limit | Upper Limit |
|---|
| Volume V0/L | 2.5 | 7 |
| Inner diameter d2/mm | 55 | 90 |
| Piston rod diameter d1/mm | 20 | 50 |
| Damping hole diameter dz/mm | 3 | 9 |
| Damping hole diameter dj/mm | 3 | 9 |
Table 4.
Sensor model and parameters.
Table 4.
Sensor model and parameters.
| Name | Model and Specification | Measure Range |
|---|
| Acceleration sensor 1 | Triaxial accelerometer | ±5 g |
| Displacement sensor 2 | Pull wire displacement sensor | 0~250 mm |
| Displacement sensor 3 | Pull rod displacement sensor | 0~100 mm |
Table 5.
Parameters of air spring for test.
Table 5.
Parameters of air spring for test.
| Air Spring Parameters | Numerical Value |
|---|
| Static height/mm | 380 |
| Initial gauge pressure/MPa | 0.518 |
| Static working volume/L | 19.1 |
| Diameter of throttle orifice/mm | 4.5 |
| Additional chamber volume/L | 19.1 |
Table 6.
Comparison of SP mean and SP standard deviation of functions under two algorithms.
Table 6.
Comparison of SP mean and SP standard deviation of functions under two algorithms.
| Test Functions | NSGA-II | Improved NSGA-II |
|---|
| SP(Avg) | SP(σ) | SP(Avg) | SP(σ) |
|---|
| ZDT1 | 0.01727 | 0.00364 | 0.01243 | 0.00138 |
| ZDT2 | 0.02143 | 0.00508 | 0.01561 | 0.00210 |
| ZDT3 | 0.01792 | 0.00339 | 0.01656 | 0.00257 |
| ZDT6 | 0.02359 | 0.00764 | 0.01807 | 0.00292 |
Table 7.
Comparison between the original suspension parameters and the parameters of the improved algorithm.
Table 7.
Comparison between the original suspension parameters and the parameters of the improved algorithm.
| Parameter | Original | Improved NSGA-II | Final Design Parameters |
|---|
| Initial volume V0/L | 2.5 | 3.98 | 4.00 |
| Inner diameter d2/mm | 63 | 79.37 | 80.00 |
| Piston rod diameter d1/mm | 35 | 43.27 | 45.00 |
| Damping hole diameter dz/mm | 3 | 5.56 | 5.50 |
| Damping hole diameter dj/mm | 3 | 4.49 | 4.50 |
Table 8.
Evaluation indicator value and promotion rate.
Table 8.
Evaluation indicator value and promotion rate.
| Evaluation Indicator | Original | Improved | Promotion Rate |
|---|
| RMS of sprung mass acceleration/(m/s2) | 0.78 | 0.57 | 26.9% |
| RMS of suspension dynamic deflection/m | 0.0194 | 0.0178 | 8.2% |
| RMS of tire dynamic load/N | 6077.85 | 5963.17 | 1.9% |
Table 9.
Comparison of test data.
Table 9.
Comparison of test data.
| Evaluation Indicator | Air Spring | Original Hydro-Pneumatic Suspension | Optimized Hydro-Pneumatic Suspension | Promotion Rate |
|---|
| RMS of sprung mass acceleration/(m/s2) | 1.42 | 0.93 | 0.75 | 19.4% |
| RMS of suspension dynamic deflection/m | 0.035 | 0.028 | 0.025 | 10.7% |
| RMS of tire dynamic load/N | 7535.69 | 6391.52 | 6136.07 | 4.0% |























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}