

System Design, Analysis, and Control of an Intelligent Vehicle for Transportation in Greenhouse
Abstract
:1. Introduction
- The design of an intelligent vehicle for greenhouses, which can automatically switch between rail and flat ground;
- The adoption of a low-cost, reliable method for vehicle positioning and navigation without changing the existing environment;
- The verification of the effectiveness of a designed vehicle on road surfaces, and track driving and rail switching via a greenhouse test.
2. System Requirement and Design
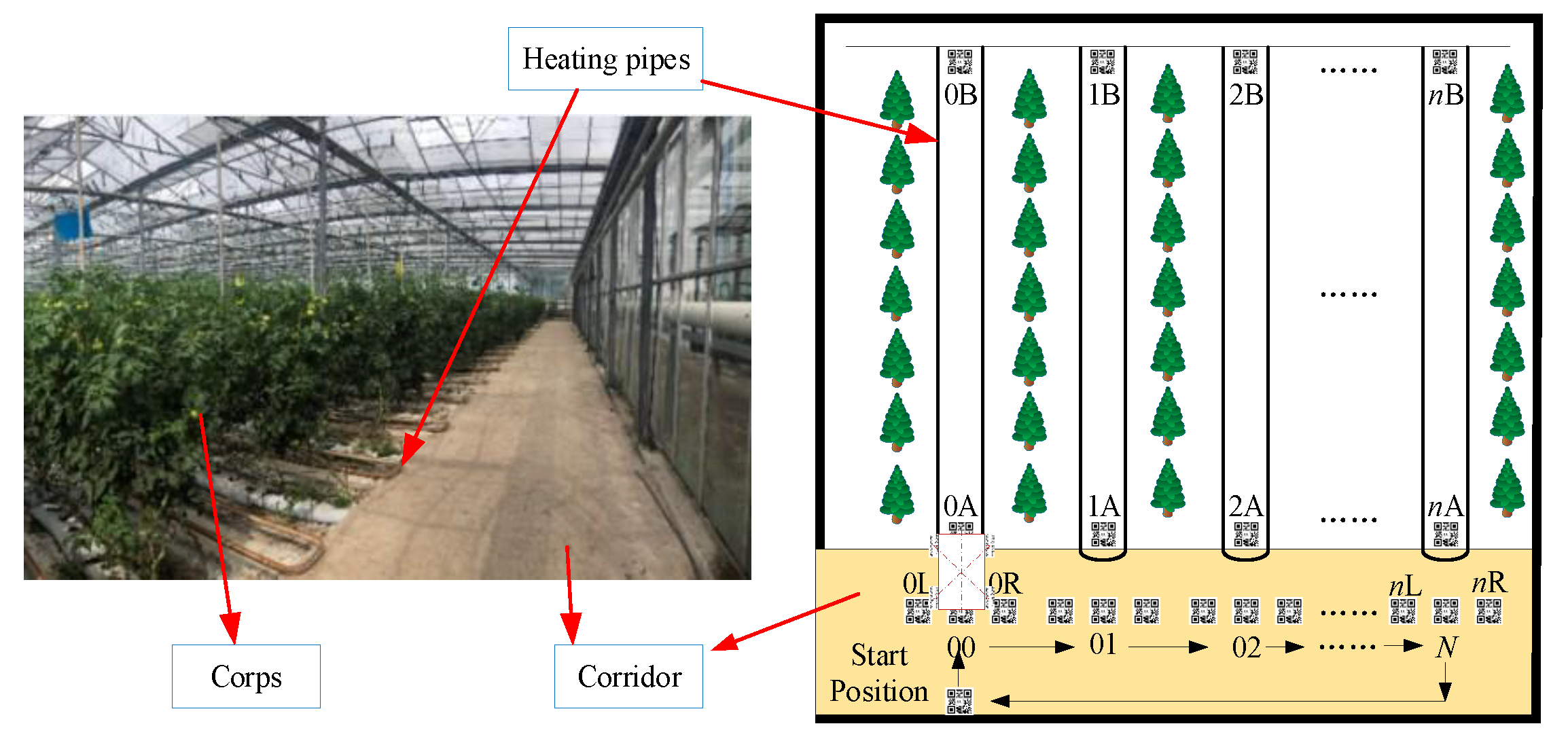
2.1. Environment of Greenhouse
- The intelligent vehicle must autonomously switch between flat ground and rail without altering the existing internal environment of the greenhouse.
- The positioning and navigation system should be as simple and feasible as possible, enabling unattended or remote control functionality within the closed environment of the greenhouse.
- The designed plant-protection vehicle must have a sufficient carrying capacity to perform tasks such as transportation or spraying.
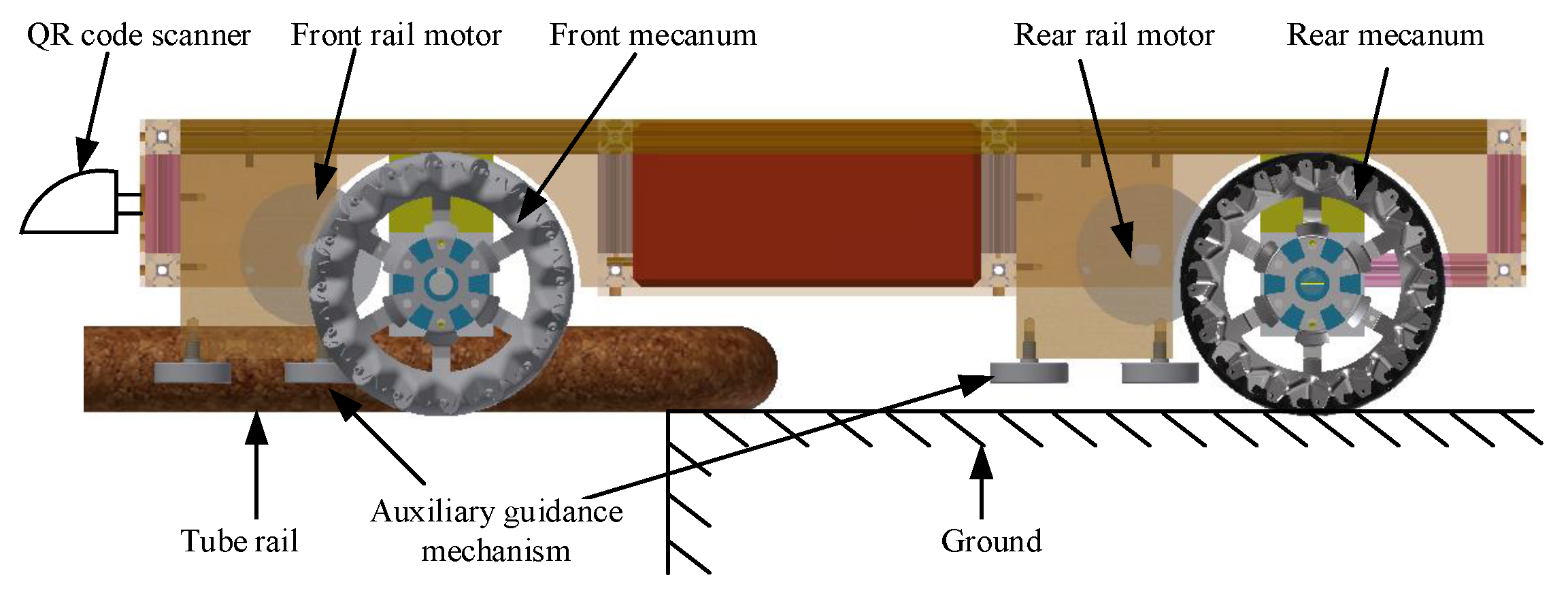
2.2. Vehicle Chassis Design
2.2.1. Ground-Driven Mechanism
2.2.2. Tube-Rail-Driven Mechanism
3. Localization and Navigation
3.1. Localization
- Most modern greenhouses have glass facades, which allow sunlight to enter and create shadows from the top support structures on the ground. This makes it difficult to use image processing technology for positioning;
- The crop growth environment inside a greenhouse is complex, leading to relatively large location errors when employing wireless positioning methods.
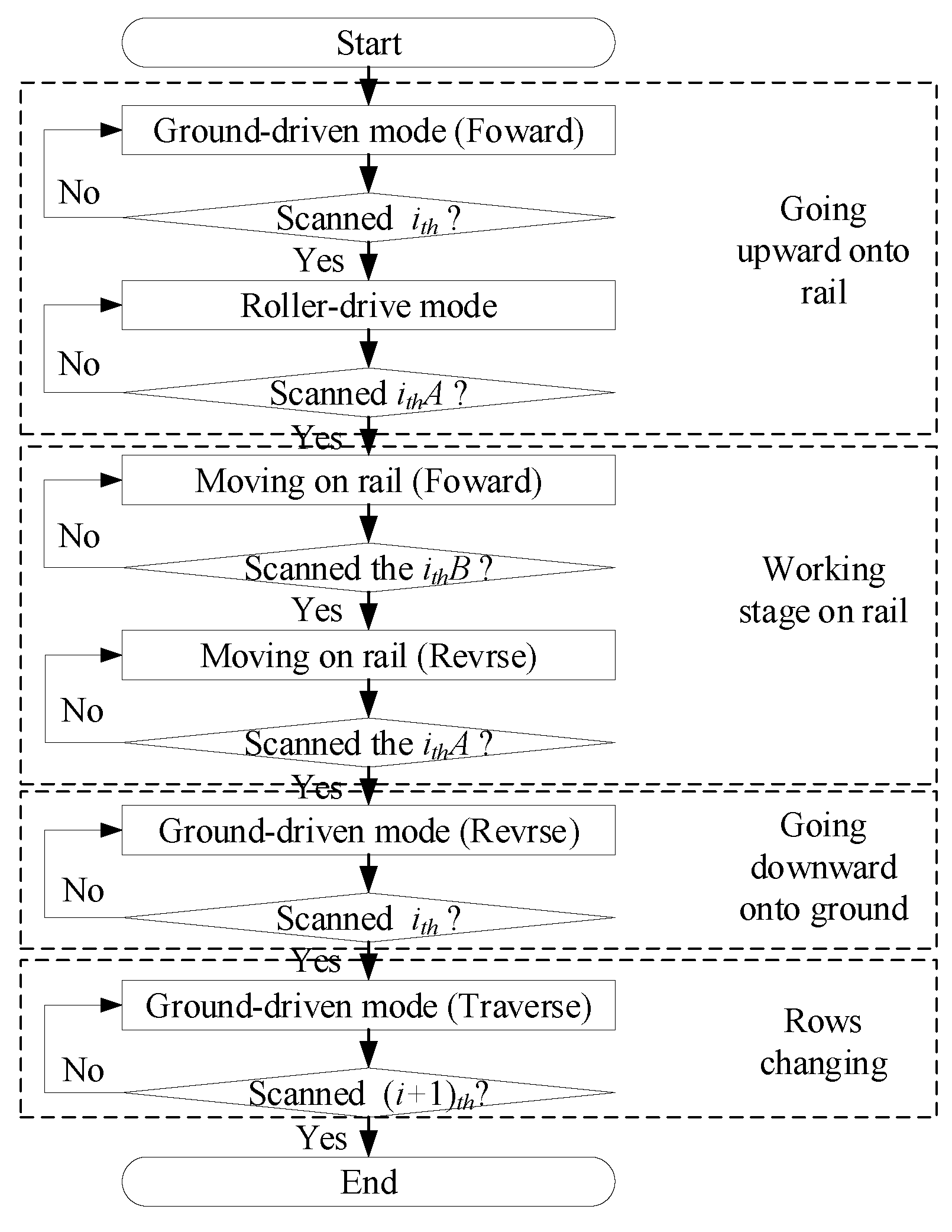
3.2. Navigation
4. Modelling and System Control
4.1. Vehicle Model
4.1.1. Kinematics Model
4.1.2. Dynamics Model
- The vehicle moves on a flat surface, with no potential energy change;
- The inertia of the mecanum wheel rollers is negligible;
- The vehicle’s self-coordinate system is situated at its center of gravity.
4.2. System Control Strategy
4.3. Vehicle Velocity Control
5. Vehicle Test and Results Analysis
5.1. System Test Environments
5.2. Results and Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cheng, C.; Fu, J.; Su, H.; Ren, L. Recent Advancements in Agriculture Robots: Benefits and Challenges. Machines 2023, 11, 48. [Google Scholar] [CrossRef]
- Bagagiolo, G.; Matranga, G.; Cavallo, E.; Pampuro, N. Greenhouse Robots: Ultimate Solutions to Improve Automation in Protected Cropping Systems—A Review. Sustainability 2022, 14, 6436. [Google Scholar] [CrossRef]
- Ullah, I.; Fayaz, M.; Aman, M.; Kim, D. Toward Autonomous Farming—A Novel Scheme Based on Learning to Prediction and Optimization for Smart Greenhouse Environment Control. IEEE Internet Things J. 2022, 9, 25300–25323. [Google Scholar] [CrossRef]
- Yang, Q.; Du, X.; Wang, Z.; Meng, Z.; Ma, Z.; Zhang, Q. A Review of Core Agricultural Robot Technologies for Crop Productions. Comput. Electron. Agric. 2023, 206, 107701. [Google Scholar] [CrossRef]
- Liu, X.; Hu, Y.; Zhou, G.; Cai, W.; He, M.; Zhan, J.; Hu, Y.; Li, L. DS-MENet for the Classification of Citrus Disease. Front. Plant Sci. 2022, 13, 884464. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Hu, Y.; Cai, W.; Zhou, G.; Zhan, J.; Li, L. DCCAM-MRNet: Mixed Residual Connection Network with Dilated Convolution and Coordinate Attention Mechanism for Tomato Disease Identification. Comput. Intell. Neurosci. 2022, 2022, 4848425. [Google Scholar] [CrossRef]
- Chen, X.; Zhou, G.; Chen, A.; Yi, J.; Zhang, W.; Hu, Y. Identification of Tomato Leaf Diseases Based on Combination of ABCK-BWTR and B-ARNet. Comput. Electron. Agric. 2020, 178, 105730. [Google Scholar] [CrossRef]
- Lv, M.; Zhou, G.; He, M.; Chen, A.; Zhang, W.; Hu, Y. Maize Leaf Disease Identification Based on Feature Enhancement and DMS-Robust Alexnet. IEEE Access 2020, 8, 57952–57966. [Google Scholar] [CrossRef]
- Watawana, B.; Isaksson, M. Design and Simulations of a Self-Assembling Autonomous Vertical Farm for Urban Farming. Agriculture 2023, 13, 112. [Google Scholar] [CrossRef]
- Kutyrev, A.; Kiktev, N.; Jewiarz, M.; Khort, D.; Smirnov, I.; Zubina, V.; Hutsol, T.; Tomasik, M.; Biliuk, M. Robotic Platform for Horticulture: Assessment Methodology and Increasing the Level of Autonomy. Sensors 2022, 22, 8901. [Google Scholar] [CrossRef]
- Tangarife, H.I.; Díaz, A.E. Robotic Applications in the Automation of Agricultural Production under Greenhouse: A Review. In Proceedings of the 2017 IEEE 3rd Colombian Conference on Automatic Control (CCAC), Cartagena, Colombia, 18–20 October 2017; pp. 1–6. [Google Scholar]
- Ko, M.H.; Ryuh, B.S.; Kim, K.C.; Suprem, A.; Mahalik, N.P. Autonomous Greenhouse Mobile Robot Driving Strategies from System Integration Perspective: Review and Application. IEEE/ASME Trans. Mechatronics 2014, 20, 1705–1716. [Google Scholar] [CrossRef]
- Kondoyanni, M.; Loukatos, D.; Maraveas, C.; Drosos, C.; Arvanitis, K.G. Bio-Inspired Robots and Structures toward Fostering the Modernization of Agriculture. Biomimetics 2022, 7, 69. [Google Scholar] [CrossRef] [PubMed]
- Ghobadpour, A.; Monsalve, G.; Cardenas, A.; Mousazadeh, H. Off-Road Electric Vehicles and Autonomous Robots in Agricultural Sector: Trends, Challenges, and Opportunities. Vehicles 2022, 4, 843–864. [Google Scholar] [CrossRef]
- Aslan, M.F.; Durdu, A.; Sabanci, K.; Ropelewska, E.; Gültekin, S.S. A Comprehensive Survey of the Recent Studies with UAV for Precision Agriculture in Open Fields and Greenhouses. Appl. Sci. 2022, 12, 1047. [Google Scholar] [CrossRef]
- Grimstad, L.; From, P.J. The Thorvald II Agricultural Robotic System. Robotics 2017, 6, 24. [Google Scholar] [CrossRef]
- Ye, Y.; Wang, Z.; Jones, D.; He, L.; Taylor, M.E.; Hollinger, G.A.; Zhang, Q. Bin-Dog: A Robotic Platform for Bin Management in Orchards. Robotics 2017, 6, 12. [Google Scholar] [CrossRef]
- Li, Y.; Zhou, W.; Song, S.; Qu, J.; Zhou, F.; Guo, K. Design of Experimental Prototype of Flexible Chassis Used in Greenhouse. Trans. Chin. Soc. Agric. Eng. 2017, 33, 41–50. [Google Scholar]
- Zhao, Y.; Gong, L.; Liu, C.; Huang, Y. Dual-Arm Robot Design and Testing for Harvesting Tomato in Greenhouse. IFAC-PapersOnLine 2016, 49, 161–165. [Google Scholar] [CrossRef]
- Roldán, J.J.; Garcia-Aunon, P.; Garzón, M.; De León, J.; Del Cerro, J.; Barrientos, A. Heterogeneous Multi-Robot System for Mapping Environmental Variables of Greenhouses. Sensors 2016, 16, 1018. [Google Scholar] [CrossRef]
- Fei, M.; Wendong, H.; Wu, C.; Sai, W. Design and Experimental Test of Multi-Functional Intelligent Vehicle for Greenhouse. In Proceedings of the 2021 4th IEEE International Conference on Industrial Cyber-Physical Systems (ICPS), Virtual, 10–12 May 2021; pp. 755–760. [Google Scholar]
- Ringdahl, O.; Kurtser, P.; Edan, Y. Evaluation of Approach Strategies for Harvesting Robots: Case Study of Sweet Pepper Harvesting. J. Intell. Robot. Syst. 2019, 95, 149–164. [Google Scholar] [CrossRef]
- Mousazadeh, H. A Technical Review on Navigation Systems of Agricultural Autonomous Off-Road Vehicles. J. Terramech. 2013, 50, 211–232. [Google Scholar] [CrossRef]
- Abanay, A.; Masmoudi, L.; El Ansari, M.; Gonzalez-Jimenez, J.; Moreno, F.A. LIDAR-Based Autonomous Navigation Method for an Agricultural Mobile Robot in Strawberry Greenhouse: AgriEco Robot. AIMS Electron. Electr. Eng. 2022, 6, 317–328. [Google Scholar] [CrossRef]
- Jiang, S.; Wang, S.; Yi, Z.; Zhang, M.; Lv, X. Autonomous Navigation System of Greenhouse Mobile Robot Based on 3D Lidar and 2D Lidar SLAM. Front. Plant Sci. 2022, 13, 815218. [Google Scholar] [CrossRef] [PubMed]
- Heidari, A.; Parian, J.A. Greenhouse Mobile Robot Navigation Using Wheel Revolution Encoding and Learning Algorithm. J. Agric. Mach. 2021, 11, 1–15. [Google Scholar]
- Roldán, J.J.; Cerro, J.; Garzón-Ramos, D.; Garcia-Aunon, P.; Garzón, M.; De León, J.; Barrientos, A. Robots in Agriculture: State of Art and Practical Experiences. In Service Robots; IntechOpen: London, UK, 2018; pp. 67–90. [Google Scholar]
- Shiigi, T.; Kondo, N.; Ogawa, Y.; Suzuki, T.; Harshana, H. Temperature Compensation Method Using Base-Station for Spread Spectrum Sound-Based Positioning System in Green House. Eng. Agric. Environ. Food 2017, 10, 233–242. [Google Scholar] [CrossRef]
- Yao, L.; Hu, D.; Zhao, C.; Yang, Z.; Zhang, Z. Wireless Positioning and Path Tracking for a Mobile Platform in Greenhouse. Int. J. Agric. Biol. Eng. 2021, 14, 216–223. [Google Scholar] [CrossRef]
- Saike, J.; Meina, Z.; Xue, L.; Yannan, Q.; Xiaolan, L. Development of Navigation and Control Technology for Autonomous Mobile Equipment in Greenhouses. J. Chin. Agric. Mech. 2022, 43, 159. [Google Scholar]
- Long, Z.; Xiang, Y.; Lei, X.; Li, Y.; Hu, Z.; Dai, X. Integrated Indoor Positioning System of Greenhouse Robot Based on UWB/IMU/ODOM/LIDAR. Sensors 2022, 22, 4819. [Google Scholar] [CrossRef]
- Yang, L.J.; Pitla, S.; Yang, Z.D.; Xia, P.P.; Zhao, C.Y. Path Tracking of Mobile Platform in Agricultural Facilities Based on Ultra Wideband Wireless Positioning. Trans. CSAE 2019, 35, 17–24. [Google Scholar]
- Chen, W.H.; You, F. Semiclosed Greenhouse Climate Control under Uncertainty via Machine Learning and Data-Driven Robust Model Predictive Control. IEEE Trans. Control Syst. Technol. 2022, 30, 1186–1197. [Google Scholar] [CrossRef]
- Gat, G.; Gan-Mor, S.; Degani, A. Stable and Robust Vehicle Steering Control Using an Overhead Guide in Greenhouse Tasks. Comput. Electron. Agric. 2016, 121, 234–244. [Google Scholar] [CrossRef]
- Yuan, Z.; Tian, Y.; Yin, Y.; Wang, S.; Liu, J.; Wu, L. Trajectory Tracking Control of a Four Mecanum Wheeled Mobile Platform: An Extended State Observer-Based Sliding Mode Approach. IET Control Theory Appl. 2020, 14, 415–426. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, H.; Liang, X.; Huang, B. Event-Triggered-Based Distributed Cooperative Energy Management for Multienergy Systems. IEEE Trans. Ind. Inform. 2019, 15, 2008–2022. [Google Scholar] [CrossRef]
- Nguyen, A.T.; Rath, J.; Guerra, T.M.; Palhares, R.; Zhang, H. Robust Set-Invariance Based Fuzzy Output Tracking Control for Vehicle Autonomous Driving under Uncertain Lateral Forces and Steering Constraints. IEEE Trans. Intell. Transp. Syst. 2020, 22, 5849–5860. [Google Scholar] [CrossRef]
- Henten, E.J.; Hemming, J.; Tuijl, B.A.J.; Kornet, J.; Meuleman, J.; Bontsema, J.; Os, E.A. An Autonomous Robot for Harvesting Cucumbers in Greenhouses. Auton. Robot. 2002, 13, 241–258. [Google Scholar] [CrossRef]
- Singh, S.; Burks, T.F.; Lee, W.S. Autonomous Robotic Vehicle Development for Greenhouse Spraying. Trans. ASAE 2005, 48, 2355–2361. [Google Scholar] [CrossRef]
- Masoudi, H.; Alimardani, R.; Omid, M.; Mohtasebi, S.S.; Bagheri, S.S. Design, Fabrication and Evaluation of a Mobile Robot for Spraying in Greenhouses. J. Agric. Eng. Res. 2011, 12, 87–100. [Google Scholar]
- Sánchez-Hermosilla, J.; González, R.; Rodríguez, F.; Donaire, J.G. Mechatronic Description of a Laser Autoguided Vehicle for Greenhouse Operations. Sensors 2013, 13, 769–784. [Google Scholar] [CrossRef]
- Gázquez, J.A.; Castellano, N.N.; Manzano-Agugliaro, F. Intelligent Low Cost Telecontrol System for Agricultural Vehicles in Harmful Environments. J. Clean. Prod. 2016, 113, 204–215. [Google Scholar] [CrossRef]
- Sharifi, M.; Young, M.S.; Chen, X.; Clucas, D.; Pretty, C. Mechatronic Design and Development of a Non-Holonomic Omnidirectional Mobile Robot for Automation of Primary Production. Cogent Eng. 2016, 3, 1250431. [Google Scholar] [CrossRef]
- Cantelli, L.; Bonaccorso, F.; Longo, D.; Melita, C.D.; Schillaci, G.; Muscato, G. A Small Versatile Electrical Robot for Autonomous Spraying in Agriculture. AgriEngineering 2019, 1, 391–402. [Google Scholar] [CrossRef]
- Heravi, A.; Ahmad, D.; Hameed, I.A.; Ramin Shamshiri, R.; Balasundram, S.K.; Yamin, M. Development of a Field Robot Platform for Mechanical Weed Control in Greenhouse Cultivation of Cucumber. In Agricultural Robots—Fundamentals and Applications; Zhou, J., Zhang, B., Eds.; IntechOpen: London, UK, 2019. [Google Scholar] [CrossRef]
- Mosalanejad, H.; Minaei, S.; Borghei, A.; Farzaneh, B. Evaluation of Navigation System of a Robot Designed for Greenhouse Spraying. Int. J. Smart Sens. Intell. Syst. 2020, 13, 1. [Google Scholar] [CrossRef]
- Xiong, Y.; Ge, Y.; Grimstad, L.; From, P.J. An Autonomous Strawberry-Harvesting Robot: Design, Development, Integration, and Field Evaluation. J. Field Robot. 2020, 37, 202–224. [Google Scholar] [CrossRef]
- Baek, E.T.; Im, D.Y. ROS-Based Unmanned Mobile Robot Platform for Agriculture. Appl. Sci. 2022, 12, 4335. [Google Scholar] [CrossRef]
- Su, L.; Liu, R.; Liu, K.; Li, K.; Liu, L.; Shi, Y. Greenhouse Tomato Picking Robot Chassis. Agriculture 2023, 13, 532. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, C.; Ni, Y.; He, S.; Wen, X. Development of Multifunctional Greenhouse Agricultural Robot. In Proceedings of the 2019 2nd International Conference on Informatics, Control and Automation (ICA 2019), Hangzhou, China, 26–27 May 2019; pp. 181–186. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Reference | Mobility | Terrain | Rows Switching |
|---|---|---|---|---|
| 2002 | [38] | 2WD | Rail | Manual |
| 2005 | [39] | 6WD | Sand and concrete | Automatic |
| 2011 | [40] | 3WD | Concrete | Automatic |
| 2013 | [41] | 4WD | Sand | Automatic |
| 2016 | [42] | Track | Earth | Manual |
| 2016 | [43] | 4WD4S | Earth | Automatic |
| 2017 | [18] | 4WD4S | Earth | Automatic |
| 2019 | [44] | Track | Earth | Automatic |
| 2019 | [45] | 1WD | Monorail | Rail-guided |
| 2019 | [22] | 2WD | Rail | Rail-guided |
| 2020 | [46] | 2WD | Concrete | Automatic |
| 2020 | [47] | 4WD4S | Sand | Automatic |
| 2021 | [26] | 4WD4S | Earth/Concrete | Automatic |
| 2021 | [24] | 4WD | Earth | Automatic |
| 2022 | [48] | 2WD | Concrete and rail | Automatic |
| 2022 | [10] | 2WD | Earth | Automatic |
| 2023 | [49] | 4WD | Plastic woven mesh | Automatic |
| Items | Unit | Requirements |
|---|---|---|
| Maximum rated load | kg | 100 |
| Speed on the ground | m/s | |
| Working speed on rail | m/s | |
| Non-working speed on rail | m/s | 1 |
| Change between rail and rail | - | Automatic |
| Change between rail and ground | - | Automatic |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, C.; Tang, X.; Xu, X. System Design, Analysis, and Control of an Intelligent Vehicle for Transportation in Greenhouse. Agriculture 2023, 13, 1020. https://doi.org/10.3390/agriculture13051020
Wu C, Tang X, Xu X. System Design, Analysis, and Control of an Intelligent Vehicle for Transportation in Greenhouse. Agriculture. 2023; 13(5):1020. https://doi.org/10.3390/agriculture13051020
Chicago/Turabian StyleWu, Changjie, Xiaolong Tang, and Xiaoyan Xu. 2023. "System Design, Analysis, and Control of an Intelligent Vehicle for Transportation in Greenhouse" Agriculture 13, no. 5: 1020. https://doi.org/10.3390/agriculture13051020