

Analysis of Rollover Characteristics of a 12 kW Automatic Onion Transplanter to Reduce Stability Hazards


 , ,
, ,  ,
, 
Abstract
:1. Introduction
2. Materials and Methods
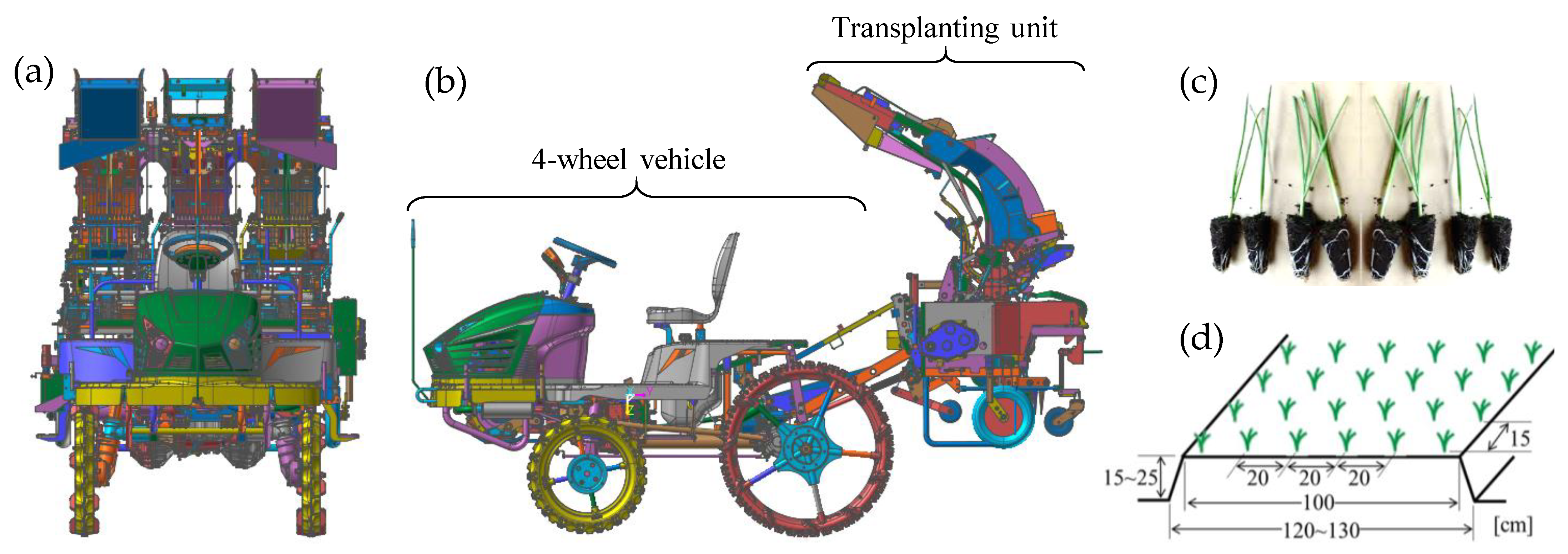
2.1. An Overview of the Underdeveloped Onion Transplanter
2.2. Stability Factors Influencing Rollover Severity
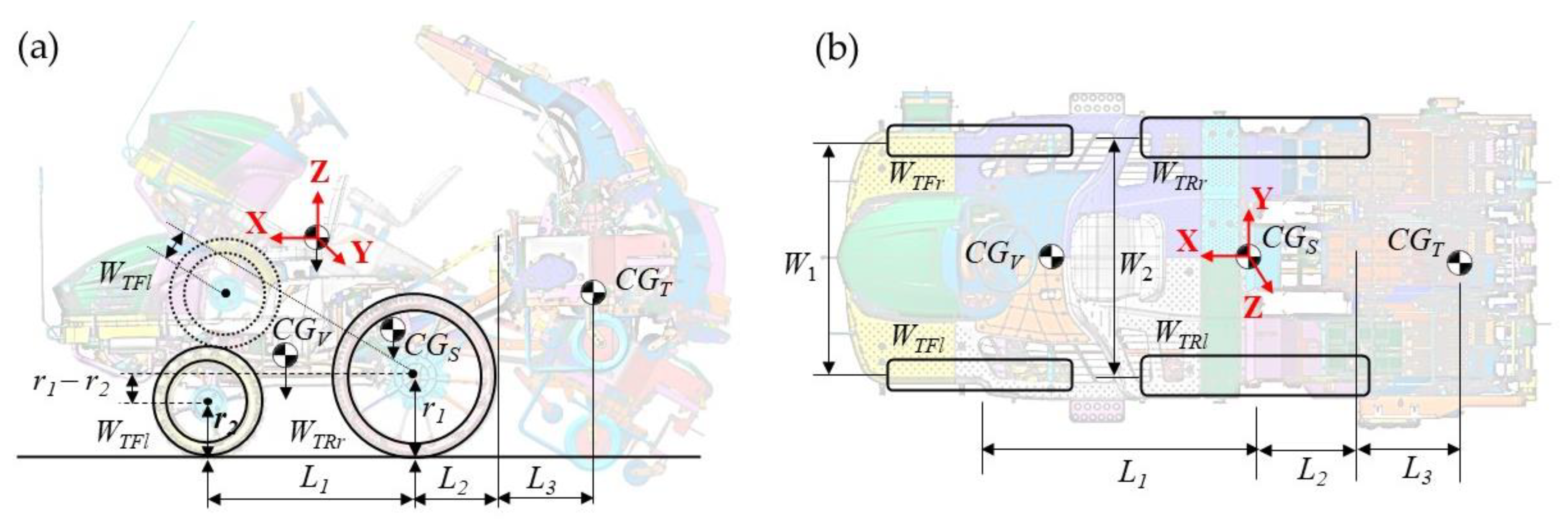
2.3. Determination of Center of Gravity Coordinates by Mass Distribution
2.4. Static Stability Analysis
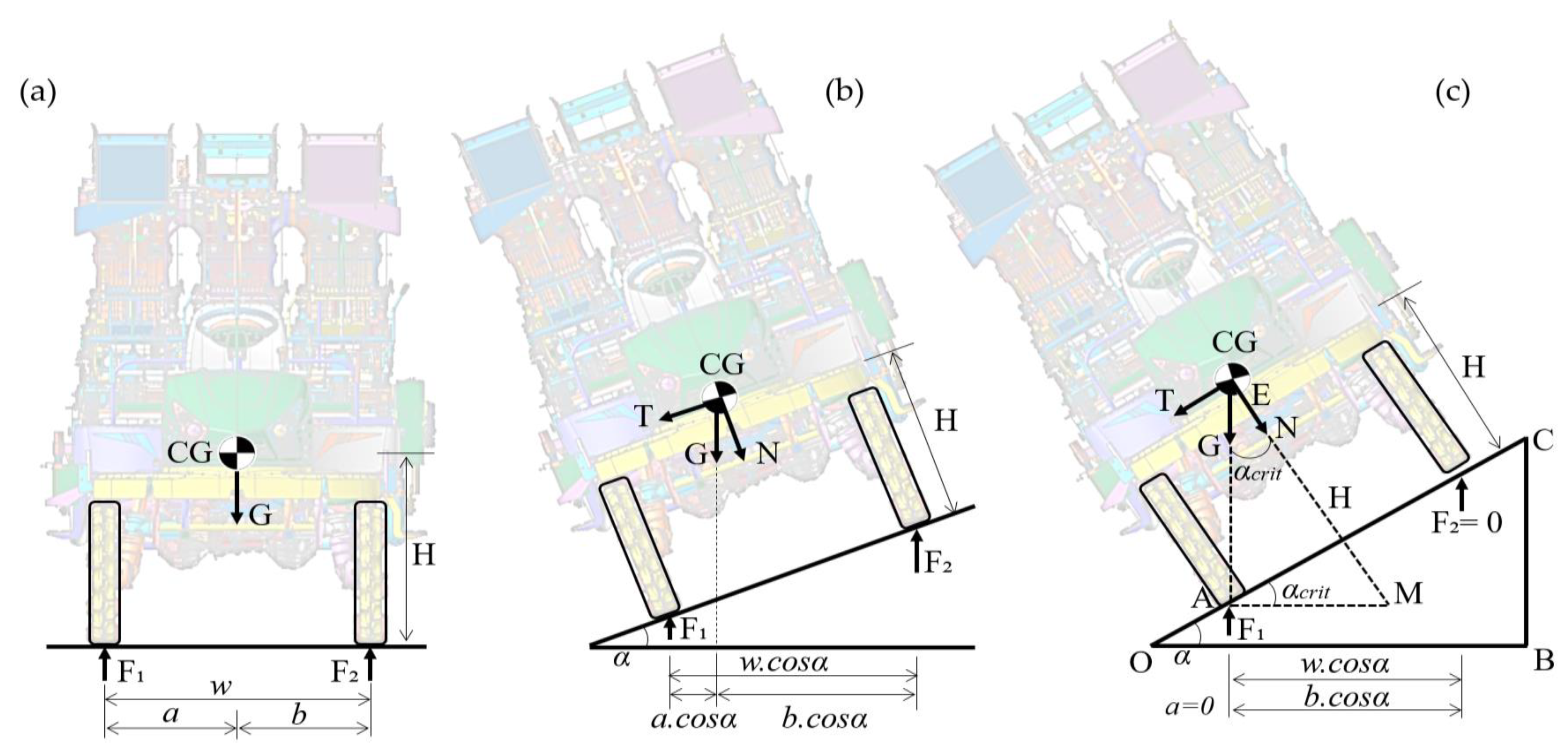
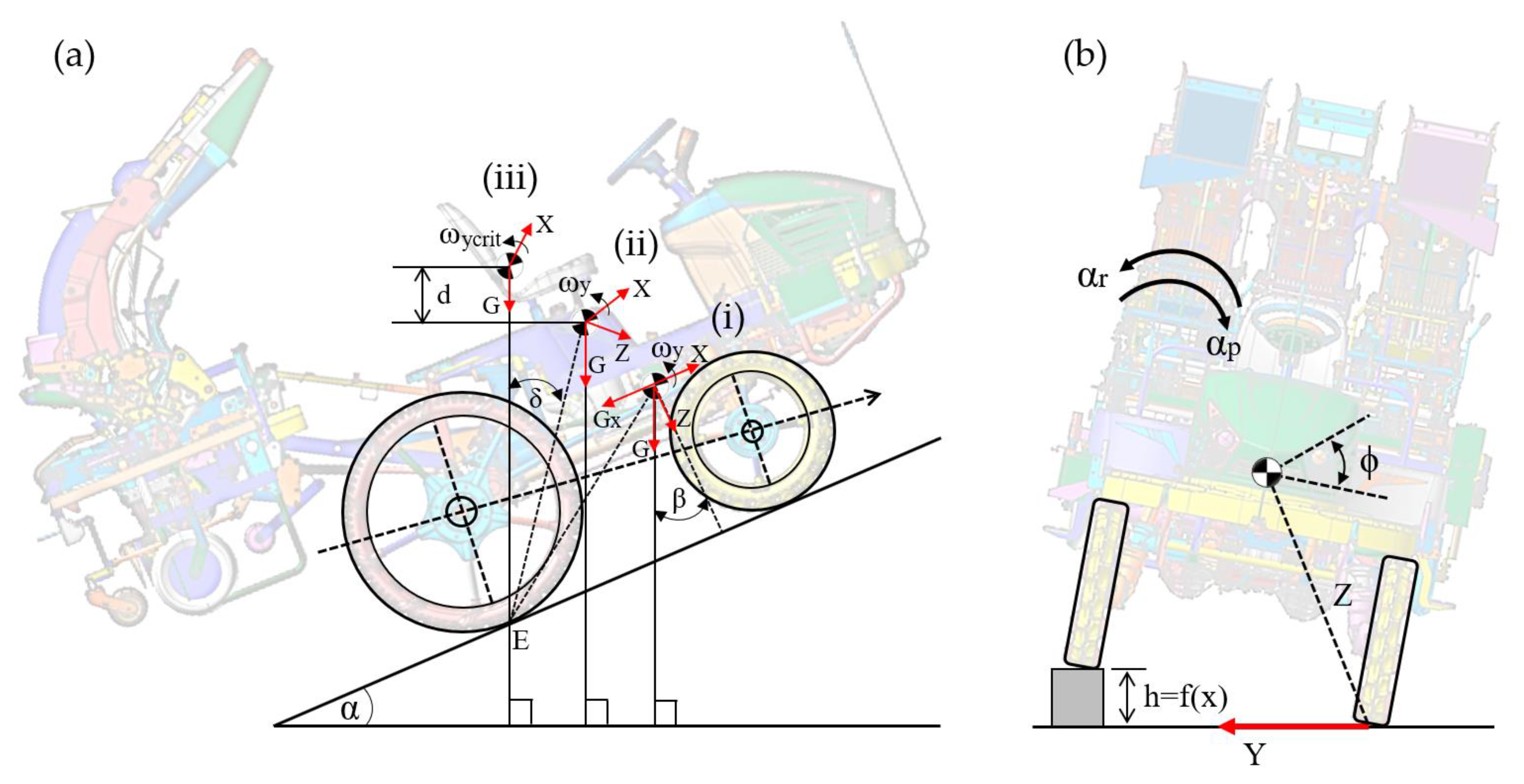
2.4.1. Theoretical Rollover under Static Conditions
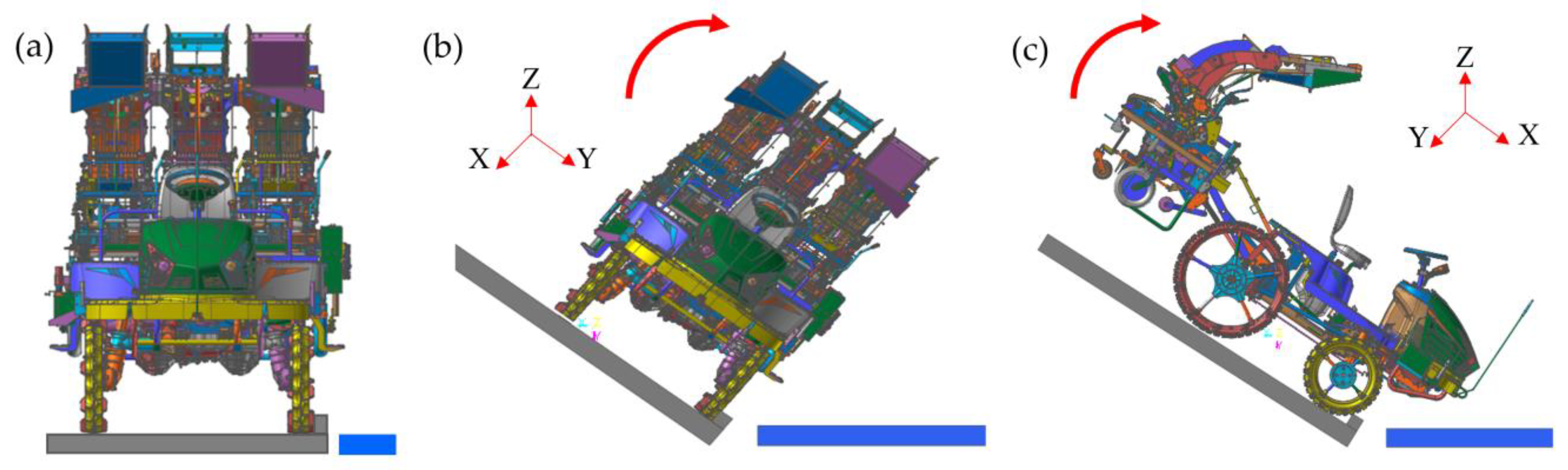
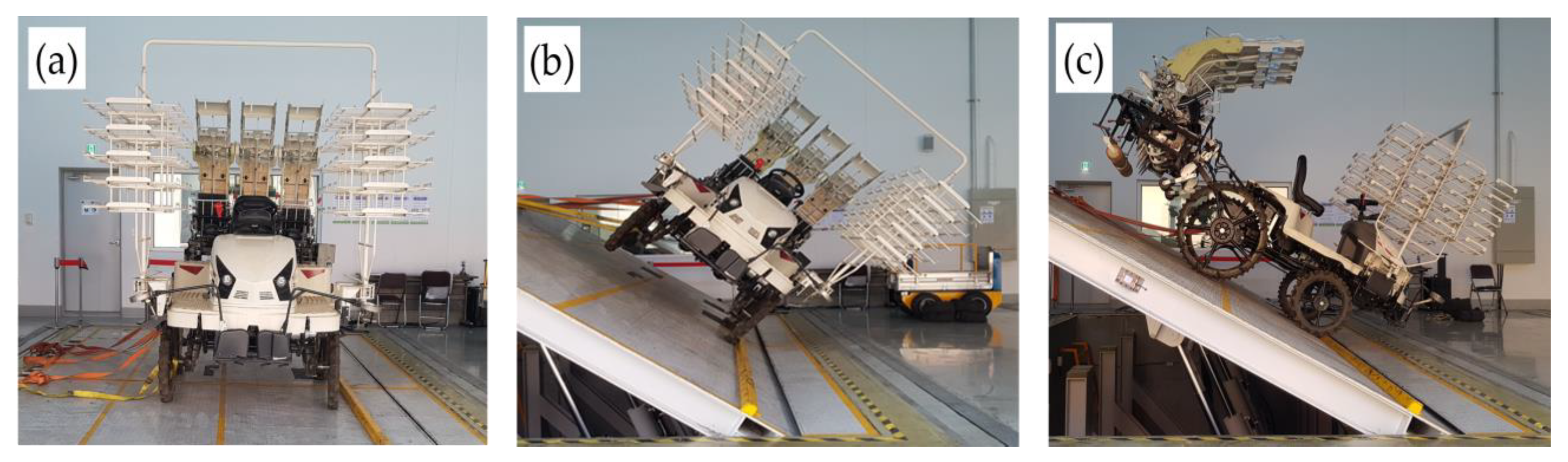
2.4.2. Simulation and Validation under Static Conditions
2.5. Dynamic Stability Analysis
2.5.1. Theoretical Rollover under Dynamic
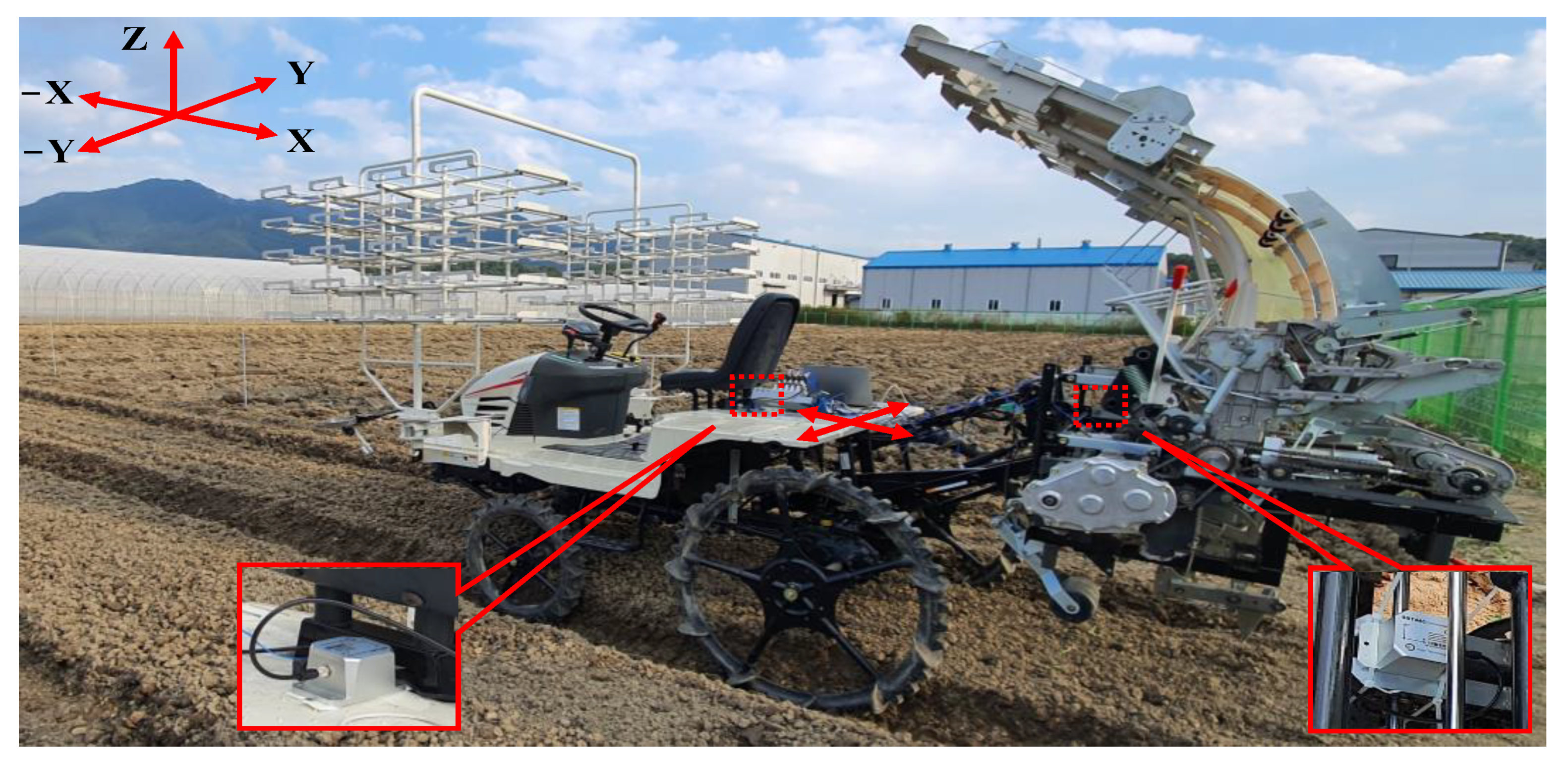
2.5.2. Analysis of Dynamic Stability Characteristics through Field Tests
2.6. Analytical Procedures
3. Results
3.1. Evaluation of Gravity Coordinates
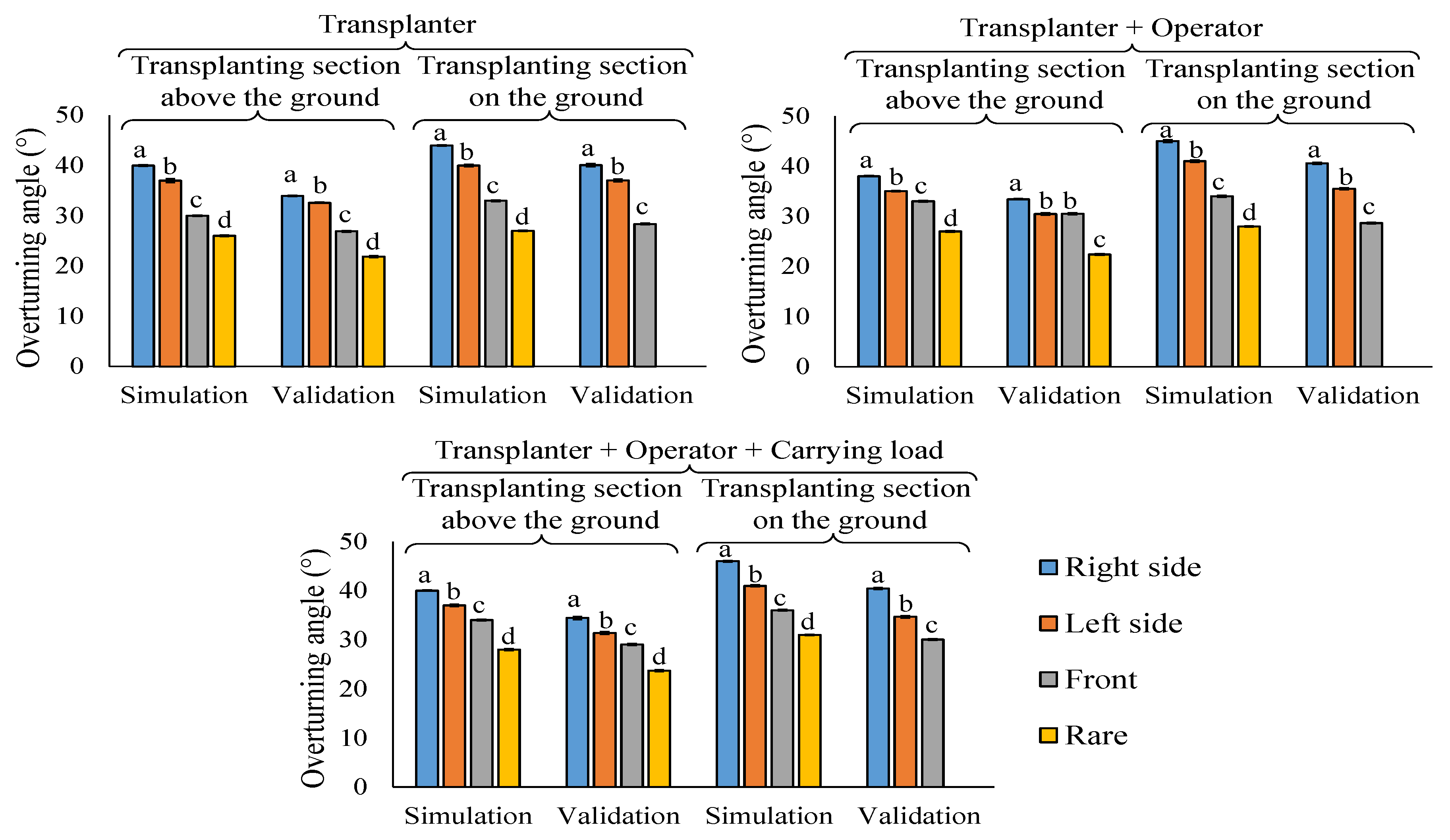
3.2. Characteristics of Static Stability
3.3. Characteristics of Dynamic Stability
4. Discussion
5. Directions for Further Research
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Variable notations, definitions, and measurement units | |
| Notations | Definitions and Units |
| F1, F2 | Ground reaction forces acting on two different wheels, N |
| G | Weight vector of the transplanter, N |
| Ga | Weight vector of the transplanter acting on the overturning point, N |
| w | Track width, mm |
| l | Wheelbase, mm |
| a, b | Distance of CG from the left and right wheel, respectively, mm |
| α | Slope angle, ° |
| αcrit | Critical slope angle, ° |
| T | Transverse force acting on CG, N |
| N | Ground reaction force acting on CG, N |
| Gx, Gz | Weight vector components for X-, and Z-axis, respectively |
| x | Vertical direction of the resultant weigh vector, rad |
| ξ | Stability coefficient, numeric |
| β | Angle between the weight vector and the component towards the Z-axis in position (i), rad |
| Xr | Vertical distance between the CG and rear-wheel overturning point, mm |
| ECG | Rotational radius of CG towards the overturning point, mm |
| δ | Angle between the (ii) and (iii) position of the CG, rad |
| γ | Angle between the X-axis and the connecting line of overturning point and CG of the transplanter in position (i), rad |
| KE | Kinetic energy induced for the rotation of the CG, J |
| PE | Potential energy induced for the rotation of the CG, J |
| ωy | Angular velocity of the transplanter related to Z-axis, rads−1 |
| ωycrit | Critical angular velocity of the transplanter related to Z-axis, rads−1 |
| Jy | Induced kinetic energy for the rotation of the CG, J |
| ωr | Angular velocity for the rolling of the transplanter, rads−1 |
| ωp | Angular velocity for the pitching of the transplanter, rads−1 |
| H | Height of the transplanter CG, mm |
| hcrit | Critical height of the CG of the transplanter, mm |
| hf | Final height of the CG of the transplanter while passing through any obstacle, mm |
| αr | Angular acceleration for the rolling of the transplanter, rads−2 |
| αp | Angular acceleration for the pitching of the transplanter, rads−2 |
| U | External force on the transplanter during the dynamic condition, N |
| ΔT | Difference in kinetic energy, J |
| ΔP | Difference in potential energy, J |
| I xx | Moment of inertia of the transplanter in X-axis, kg·mm−2 |
| I yy | Moment of inertia of the transplanter in Y-axis, kg·mm−2 |
| mt | Mass of the transplanter, N |
| Vc | The initial velocity of the transplanter while hits an obstacle in the path, mm·s−1 |
| Vf | The forward velocity of the transplanter, mm·s−1 |
| θ | Angle between the overturning point and the peak of the obstacle, rad |
| ϕ | Angular displacement of the CG during passes through an obstacle, rad |
| ζ | Damping coefficient, numeric |
| ζn, ζt | Normal and tangential damping coefficient, respectively, numeric |
| k | Spring coefficient, numeric |
| kn, kt | Normal and tangential spring coefficient, respectively, numeric |
| m1, m2, m3 | Stiffness, damping, and indentation exponent, respectively, numeric |
References
- Lanzotti, V. The analysis of onion and garlic. J. Chromatogr. A 2006, 1112, 3–22. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Law, Y.-Y.; Chiu, H.-F.; Lee, H.-H.; Shen, Y.-C.; Venkatakrishnan, K.; Wang, C.-K. Consumption of onion juice modulates oxidative stress and attenuates the risk of bone disorders in middle-aged and post-menopausal healthy subjects. Food Func. 2016, 7, 902–912. [Google Scholar] [CrossRef] [PubMed]
- Sami, R.; Elhakem, A.; Alharbi, M.; Almatrafi, M.; Benajiba, N.; Ahmed Mohamed, T.; Fikry, M.; Helal, M. In-vitro evaluation of the antioxidant and anti-inflammatory activity of volatile compounds and minerals in five different onion varieties. Separations 2021, 8, 57. [Google Scholar] [CrossRef]
- Sharma, K.; Mahato, N.; Hariram Nile, S.; Tal Lee, E.; Rok Lee, Y. Economical and environmentally-friendly approaches for usage of onion (Allium cepa L.) waste. Food Func. 2016, 7, 3354–3369. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.-X.; Lin, F.-J.; Li, H.; Li, H.-B.; Wu, D.-T.; Geng, F.; Ma, W.; Wang, Y.; Miao, B.-H.; Gan, R.-Y. Recent advances in bioactive compounds, health functions, and safety concerns of onion (Allium cepa L.). Front. Nutr. 2021, 8, 669805. [Google Scholar] [CrossRef] [PubMed]
- Geisseler, D.; Ortiz, R.S.; Diaz, J. Nitrogen nutrition and fertilization of onions (Allium cepa L.)—A literature review. Sci. Hortic. 2022, 291, 110591. [Google Scholar] [CrossRef]
- Rasool, K.; Islam, M.; Ali, M.; Jang, B.-E.; Khan, N.; Chowdhury, M.; Chung, S.-O.; Kwon, H.-J. Onion transplanting mechanisms: A review. Prec. Agri. Sci. Technol. 2020, 2, 195–208. [Google Scholar] [CrossRef]
- Li, J.; Tang, Y.; Zou, X.; Lin, G.; Wang, H. Detection of fruit-bearing branches and localization of litchi clusters for vision-based harvesting robots. IEEE Access 2020, 8, 117746–117758. [Google Scholar] [CrossRef]
- Lin, G.; Zhu, L.; Li, J.; Zou, X.; Tang, Y. Collision-free path planning for a guava-harvesting robot based on recurrent deep reinforcement learning. Comput. Electron. Agric. 2021, 188, 106350. [Google Scholar] [CrossRef]
- Li, C.E.; Tang, Y.; Zou, X.; Zhang, P.; Lin, J.; Lian, G.; Pan, Y. A novel agricultural machinery intelligent design system based on integrating image processing and knowledge reasoning. Appl. Sci. 2022, 12, 7900. [Google Scholar] [CrossRef]
- Gao, Q.; Gao, F.; Tian, L.; Li, L.; Ding, N.; Xu, G.; Jiang, D. Design and development of a variable ground clearance, variable wheel track self-leveling hillside vehicle power chassis (V2-HVPC). J. Terramech. 2014, 56, 77–90. [Google Scholar] [CrossRef]
- Iqbal, M.Z.; Islam, M.N.; Chowdhury, M.; Islam, S.; Park, T.; Kim, Y.-J.; Chung, S.-O. Working speed analysis of the gear-driven dibbling mechanism of a 2.6 kW walking-type automatic pepper transplanter. Machines 2021, 9, 6. [Google Scholar] [CrossRef]
- Reza, M.N.; Islam, M.N.; Chowdhury, M.; Ali, M.; Islam, S.; Kiraga, S.; Lim, S.-J.; Choi, I.-S.; Chung, S.-O. Kinematic analysis of a gear-driven rotary planting mechanism for a six-row self-propelled onion transplanter. Machines 2021, 9, 183. [Google Scholar] [CrossRef]
- Ali, M.; Lee, Y.-S.; Chowdhury, M.; Khan, N.A.; Swe, K.M.; Rasool, K.; Kabir, M.S.N.; Lee, D.-H.; Chung, S.-O. Analysis of driving stability and vibration of a 20-kW self-propelled 1-row Chinese cabbage harvester. J. Biosyst. Eng. 2021, 46, 48–59. [Google Scholar] [CrossRef]
- Islam, M.N.; Iqbal, M.Z.; Ali, M.; Chowdhury, M.; Kabir, M.S.N.; Park, T.; Kim, Y.-J.; Chung, S.-O. Kinematic analysis of a clamp-type picking device for an automatic pepper transplanter. Agriculture 2020, 10, 627. [Google Scholar] [CrossRef]
- Chowdhury, M.; Gulandaz, M.A.; Kiraga, S.; Ali, M.; Reza, M.N.; Kwon, H.J.; Lee, D.H.; Chung, S.O. Turning stability analysis of a 12-kW self-propelled riding-type automatic onion transplanter to ensure user safety. IOP Conf. Ser. Earth Environ. Sci. 2021, 924, 012014. [Google Scholar] [CrossRef]
- Islam, M.N.; Iqbal, M.Z.; Ali, M.; Chowdhury, M.; Kiraga, S.; Kabir, M.S.N.; Lee, D.-H.; Woo, J.-K.; Chung, S.-O. Theoretical transmission analysis to optimise gearbox for a 2.6 kW automatic pepper transplanter. J. Agric. Eng. 2022, 53. [Google Scholar] [CrossRef]
- Islam, M.N.; Iqbal, M.Z.; Chowdhury, M.; Ali, M.; Shafik, K.; Kabir, M.S.N.; Lee, D.-H.; Chung, S.-O. Stress and fatigue analysis of picking device gears for a 2.6 kW automatic pepper transplanter. Appl. Sci. 2021, 11, 2241. [Google Scholar] [CrossRef]
- Rasool, K.; Ali, M.; Chowdhury, M.; Kwon, H.J.; Swe, K.M.; Chung, S.O. Theoretical analysis of velocity, acceleration and torque calculation of a five-bar onion transplanting mechanism. IOP Conf. Ser. Earth Environ. Sci. 2021, 733, 012019. [Google Scholar] [CrossRef]
- Chowdhury, M.; Islam, M.N.; Iqbal, M.Z.; Islam, S.; Lee, D.-H.; Kim, D.-G.; Jun, H.-J.; Chung, S.-O. Analysis of overturning and vibration during field operation of a tractor-mounted 4-row radish collector toward ensuring user safety. Machines 2020, 8, 77. [Google Scholar] [CrossRef]
- Qin, J.; Zhu, Z.; Mitsuoka, M.; Inoue, E.; Okayasu, T.; Hirai, Y.; Li, Z.; Song, Z. Coupled effect of slope angle and terrain roughness on tractor stability. J. Fac. Agric. 2018, 63, 355–360. [Google Scholar] [CrossRef]
- Ayers, P.; Conger, J.B.; Comer, R.; Troutt, P. Stability analysis of agricultural off-road vehicles. J. Agric. Saf. Health 2018, 24, 167–182. [Google Scholar] [CrossRef] [PubMed]
- Gillespie, T. Fundamentals of Vehicle Dynamics; Revised edition; SAE International: Warrendale, PA, USA, 2021; pp. 249–260. [Google Scholar]
- Choi, K.; Kim, S.-M.; Hong, S. Analysis of static stability by modified mathematical model for asymmetric tractor-harvester system: Changes in lateral overturning angle by movement of center of gravity coordinates. J. Biosyst. Eng. 2017, 42, 127–135. [Google Scholar] [CrossRef]
- Hong, S.; Lee, K.; Kang, D.; Park, W. Analysis of static lateral stability using mathematical simulations for 3-axis tractor-baler system. J. Biosyst. Eng. 2017, 42, 86–97. [Google Scholar] [CrossRef]
- Myers, M.L. Folding ROPS or automatically deployable ROPS? J. Agric. Saf. Health 2015, 21, 201–204. [Google Scholar]
- MAFRA. Agricultural Mechanization Promotion Act. Article 9. Available online: https://elaw.klri.re.kr/eng_mobile/viewer.do?hseq=50965&type=part&key=24 (accessed on 15 February 2023).
- Lozia, Z. Rollover thresholds of the biaxial truck during motion on an even road. Veh. Syst. Dyn. 1998, 29, 735–740. [Google Scholar] [CrossRef]
- Dukkipati, R.V.; Pang, J.; Qatu, M.S.; Sheng, G.; Shuguang, Z. Road Vehicle Dynamics; SAE international: Warrendale, PA, USA, 2008; pp. 311–353. [Google Scholar]
- Lozia, Z. Rollover of the biaxial vehicle (untripped case). Logistyka 2010, 4, 1–8. [Google Scholar]
- MAFF. Specific Farming Village Law-Direct Support System for Middle Mountainous Area. Available online: https://www.maff.go.jp/e/data/publish/ (accessed on 25 December 2022).
- Cao, D.; Song, X.; Ahmadian, M. Editors’ perspectives: Road vehicle suspension design, dynamics, and control. Veh. Syst. Dyn. 2011, 49, 3–28. [Google Scholar] [CrossRef] [Green Version]
- ISO 789-6; 1982 Agricultural Tractors—Test Procedures—Part 6: Centre of Gravity. International Organization for Standardization, ISO: Geneva, Switzerland, 1982.
- ISO 16231-2; 2015 Self-Propelled Agricultural Machinery—Assessment of Stability—Part 2: Determination of Static Stability and Test Procedures. International Organization for Standardization, ISO: Geneva, Switzerland, 2015.
- Khorsandi, F.; Ayers, P.D.; Freeland, R.S.; Wang, X. Modeling the effect of liquid movement on the center of gravity calculation of agricultural vehicles. J. Terramech. 2018, 75, 37–48. [Google Scholar] [CrossRef]
- Wang, X.; Gao, L.; Ayers, P.D.; Su, S.; Yuan, C. The influence of the lift angle on the center of gravity: Measurements for zero turning radius mowers. Appl. Eng. Agric. 2016, 32, 189–199. [Google Scholar]
- ANSI/OPEI B71.9; 2016—Multipurpose Off-Highway Utility Vehicles. American National Standards Institute (ANSI): New York, NY, USA, 2016.
- ANSI/OPEI B71.4; 2017 Commercial Turf Care Equipment Safety Specifications: Changes. American National Standards Institute (ANSI): New York, NY, USA, 2017.
- ANSI/ASABE AD26322-1; 2008 Tractors for Agriculture and Forestry—Safety—Part 1: Standard Tractors. American National Standards Institute (ANSI): New York, NY, USA, 2008.
- ANSI/ASABE AD26322-2; 2010 Tractors for Agriculture and Forestry—Safety—Part 2: Narrow-Track and Small Tractors. American National Standards Institute (ANSI): New York, NY, USA, 2010.
- ASAE/ASABE S318.18; 2017 Safety for Agricultural Field Equipment. The American Society of Agricultural and Biological Engineers (ASABE): New York, NY, USA, 2017.
- ANSI/SVIA 1; 2017 American National Standard for Four Wheel All-Terrain Vehicles. American National Standards Institute (ANSI): New York, NY, USA, 2017.
- Dabbour, E.; Dabbour, O.; Martinez, A.A. Temporal stability of the factors related to the severity of drivers’ injuries in rear-end collisions. Accid. Anal. Prev. 2020, 142, 105562. [Google Scholar] [CrossRef] [PubMed]
- Phanomchoeng, G.; Rajamani, R. New rollover index for the detection of tripped and untripped rollovers. IEEE Trans. Ind. Electron. 2013, 60, 4726–4736. [Google Scholar] [CrossRef]
- Rédl, J.; Váliková, V.; Antl, J. Design of active stability control system of agricultural off-road vehicles. Res. Agric. Eng. 2014, 60, S77–S84. [Google Scholar] [CrossRef] [Green Version]
- Fargnoli, M.; Lombardi, M. Safety vision of agricultural tractors: An engineering perspective based on recent studies (2009–2019). Safety 2020, 6, 1. [Google Scholar] [CrossRef] [Green Version]
- Reński, A. Investigation of the Influence of the Centre of Gravity Position on the Course of Vehicle Rollover. In Proceedings of the 24th International Technical Conference on the Enhanced Safety of Vehicles (ESV) National Highway Traffic Safety Administration, Gothenburg, Sweden, 8–11 June 2015; pp. 8–11. [Google Scholar]
- Iqbal, M.Z.; Islam, M.N.; Ali, M.; Kiraga, S.; Kim, Y.-J.; Chung, S.-O. Theoretical overturning analysis of a 2.6-kW two-row walking-type automatic pepper transplanter. J. Biosyst. Eng. 2022, 47, 79–91. [Google Scholar] [CrossRef]
- Jang, B.E.; Chowdhury, M.; Ali, M.; Islam, M.N.; Swe, K.M.; Jung, D.U.; Lee, S.H.; Chung, S.O. Stability and vibration analysis of a tractor-mounted Chinese cabbage collector. IOP Conf. Ser. Earth Environ. Sci. 2021, 733, 012021. [Google Scholar] [CrossRef]
- Lysych, M.N. A study of the static lateral stability of a tillage machine-tractor unit on a virtual stand. J. Phys. Conf. Ser. 2020, 1515, 042033. [Google Scholar] [CrossRef]
- Mann, M.; Shiller, Z. Dynamic stability of off-road vehicles: Quasi-3D analysis. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 2301–2306. [Google Scholar]
- Bietresato, M.; Mazzetto, F. Definition of the layout for a new facility to test the static and dynamic stability of agricultural vehicles operating on sloping grounds. Appl. Sci. 2019, 9, 4135. [Google Scholar] [CrossRef] [Green Version]
- Noboru, N.; Michio, K.; Kazunobu, I.; Hideo, T. Field automation using robot tractor. In Proceedings of the Automation Technology for Off-Road Equipment Proceedings of the 2002 Conference, Chicago, IL, USA, 26–27 July 2002; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA; pp. 239–245. [Google Scholar]
- Shan, Y.; Yao, X.; Lin, H.; Zou, X.; Huang, K. LiDAR-based stable navigable region detection for unmanned surface vehicles. IEEE Trans. Instrum. Meas. 2021, 70, 8501613. [Google Scholar] [CrossRef]
- Li, Y.; Ibanez-Guzman, J. Lidar for autonomous driving: The principles, challenges, and trends for automotive lidar and perception systems. IEEE Signal Process. Mag. 2020, 37, 50–61. [Google Scholar] [CrossRef]
- Kanagasingham, S.; Ekpanyapong, M.; Chaihan, R. Integrating machine vision-based row guidance with GPS and compass-based routing to achieve autonomous navigation for a rice field weeding robot. Precis. Agric. 2020, 21, 831–855. [Google Scholar] [CrossRef]
- Wang, T.; Chen, B.; Zhang, Z.; Li, H.; Zhang, M. Applications of machine vision in agricultural robot navigation: A review. Comput. Electron. Agric. 2022, 198, 107085. [Google Scholar] [CrossRef]
- Pei, H.; Zhang, S.; Borana, L.; Zhao, Y.; Yin, J. Slope stability analysis based on real-time displacement measurements. Measurement 2019, 131, 686–693. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Physical Properties | Mass Distribution | |||
|---|---|---|---|---|
| Specification of 4-wheel vehicle | Mass of driver (kg) | 80 | ||
| Length (mm) | 2602 | Mass of carrying load (kg) | 40 | |
| Width (mm) | 1716 | 4-wheel vehicle | ||
| Height (mm) | 1648 | Mass in front left wheel, WVFl (kg) | 250 | |
| Front wheel track, W2 (mm) | 1400 | Mass in front right wheel, WVFr (kg) | 237 | |
| Rear wheel track, W1 (mm) | 1400 | Mass in rear left wheel, WVRl (kg) | 32 | |
| Front wheel radius, r2 (mm) | 650 | Mass in rear right wheel, WVRr (kg) | 56 | |
| Rear wheel radius, r1 (mm) | 950 | Total mass, WV (kg) | 575 | |
| Wheelbase, L1 (mm) | 1200 | Whole transplanter | Normal | Lifted |
| Rear axle to three-point hitch, L2 (mm) | 1200 | Mass in front left wheel, WTFl (kg) | 198 | 124 |
| Transmission level | HST | Mass in front right wheel, WTFr (kg) | 153 | 95 |
| Maximum power (kW·rpm−1) | 16.2/3400 | Mass in rear left wheel, WTRl (kg) | 385 | 464 |
| Front tread width (mm) | 80 | Mass in rear right wheel, WTRr (kg) | 409 | 462 |
| Rear tread width (mm) | 150 | Total mass, WT (kg) | 1145 | |
| Front and rear tire radius diff. (mm) | 70 | Whole Transplanter + Operator | ||
| Specification of the whole transplanter | Mass in front left wheel, WTFl (kg) | 230 | 149 | |
| Length (mm) | 875 | Mass in front right wheel, WTFr (kg) | 187 | 120 |
| Width (mm) | 1626 | Mass in rear left wheel, WTRl (kg) | 397 | 481 |
| Height (mm) | 2036 | Mass in rear right wheel, WTRr (kg) | 411 | 475 |
| Ground clearance (mm) | 850 | Total mass, WT (kg) | 1225 | |
| Number of rows | 6 | Whole transplanter + Operator + Carrying load | ||
| Row spacing (mm) | 200 | Mass in front left wheel, WTFl (kg) | 246 | 164 |
| Hill spacing (mm) | 174 | Mass in front right wheel, WTFr (kg) | 203 | 136 |
| Power take-off (rpm) | 74 | Mass in rear left wheel, WTRl (kg) | 401 | 487 |
| Transplanting speed (m·s−1) | 0.24 | Mass in rear right wheel, WTRr (kg) | 415 | 478 |
| Transplanting mechanism | Mechanical | Total mass, WT (kg) | 1265 | |
| CGS Coordinates | Transplanter | Transplanter + Operator | Transplanter + Operator + Carrying Load | |||
|---|---|---|---|---|---|---|
| Normal | Lifted | Normal | Lifted | Normal | Lifted | |
| XT (mm) | 367.86 | 229.52 | 408.49 | 263.51 | 425.93 | 284.58 |
| YT (mm) | −307.69 | −338.47 | −352.55 | −382.71 | −380.54 | −409.01 |
| ZT (mm) | 429.86 | 454.99 | 609.77 | 493.94 | 628.47 | 516.04 |
| Static Rollover Angle of Different Farm Machinery | Lateral Rollover | Reference | |
|---|---|---|---|
| Left | Right | ||
| Tractor-baler system | 19.5° | 19.5° | [25] |
| Cabbage harvester | 32° | 30° | [14] |
| Radish collector | 26.74° | 38.07° | [20] |
| Chinese cabbage collector | 33.2° | 45.6° | [49] |
| Pepper transplanter | 40.67° | 40.67° | [48] |
| Tractor with tillage implement | 36° | 36° | [50] |
| Terrain vehicles | 41.3° | 33.7° | [22] |
| Off-road utility vehicles | 46.2° | 37.7° | [22] |
| Lawn tractors | 40° | 36.4° | [22] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chowdhury, M.; Ali, M.; Habineza, E.; Reza, M.N.; Kabir, M.S.N.; Lim, S.-J.; Choi, I.-S.; Chung, S.-O. Analysis of Rollover Characteristics of a 12 kW Automatic Onion Transplanter to Reduce Stability Hazards. Agriculture 2023, 13, 652. https://doi.org/10.3390/agriculture13030652
Chowdhury M, Ali M, Habineza E, Reza MN, Kabir MSN, Lim S-J, Choi I-S, Chung S-O. Analysis of Rollover Characteristics of a 12 kW Automatic Onion Transplanter to Reduce Stability Hazards. Agriculture. 2023; 13(3):652. https://doi.org/10.3390/agriculture13030652
Chicago/Turabian StyleChowdhury, Milon, Mohammod Ali, Eliezel Habineza, Md Nasim Reza, Md Shaha Nur Kabir, Seung-Jin Lim, Il-Su Choi, and Sun-Ok Chung. 2023. "Analysis of Rollover Characteristics of a 12 kW Automatic Onion Transplanter to Reduce Stability Hazards" Agriculture 13, no. 3: 652. https://doi.org/10.3390/agriculture13030652