
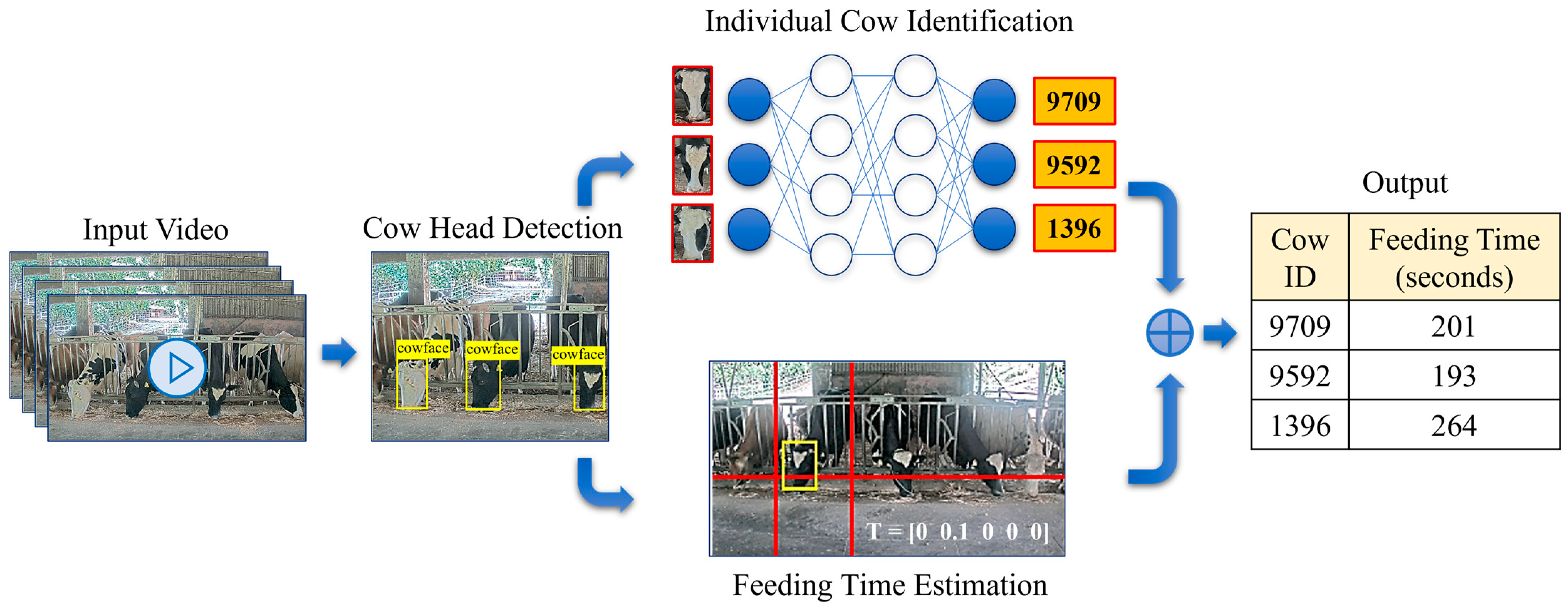
Facial Region Analysis for Individual Identification of Cows and Feeding Time Estimation


Abstract
:1. Introduction
- (1)
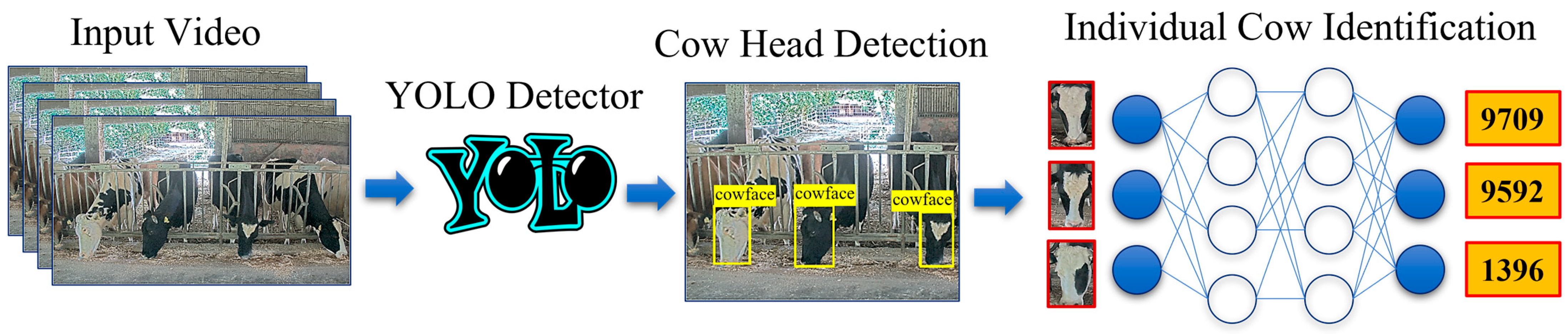
- The use of YOLO, which provides the real-time detection of cow head regions and real-time confirmation of feeding time.
- (2)
- The ability to diagnose cow diseases and movement disorders by recording changes in feeding time, which helps improve health management.
- (3)
- The potential to improve farmers’ work efficiency and reduce their workload by managing the feeding time of all cows.
2. Materials and Methods
2.1. Individual Identification Using Face Region Images of Cow
2.1.1. Cow Head Region Detection
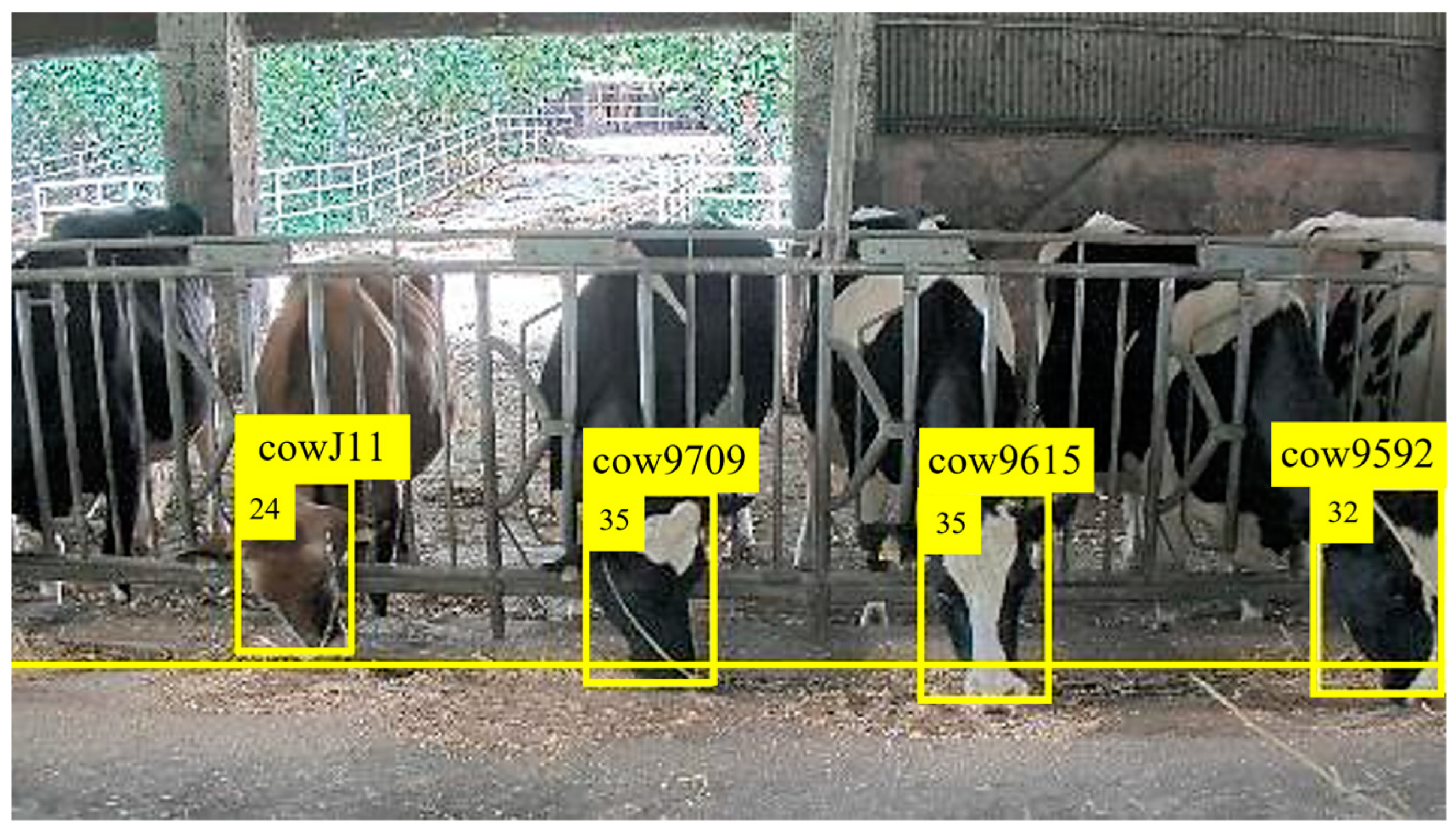
2.1.2. Individual Identification Using Face Region Images of Cow
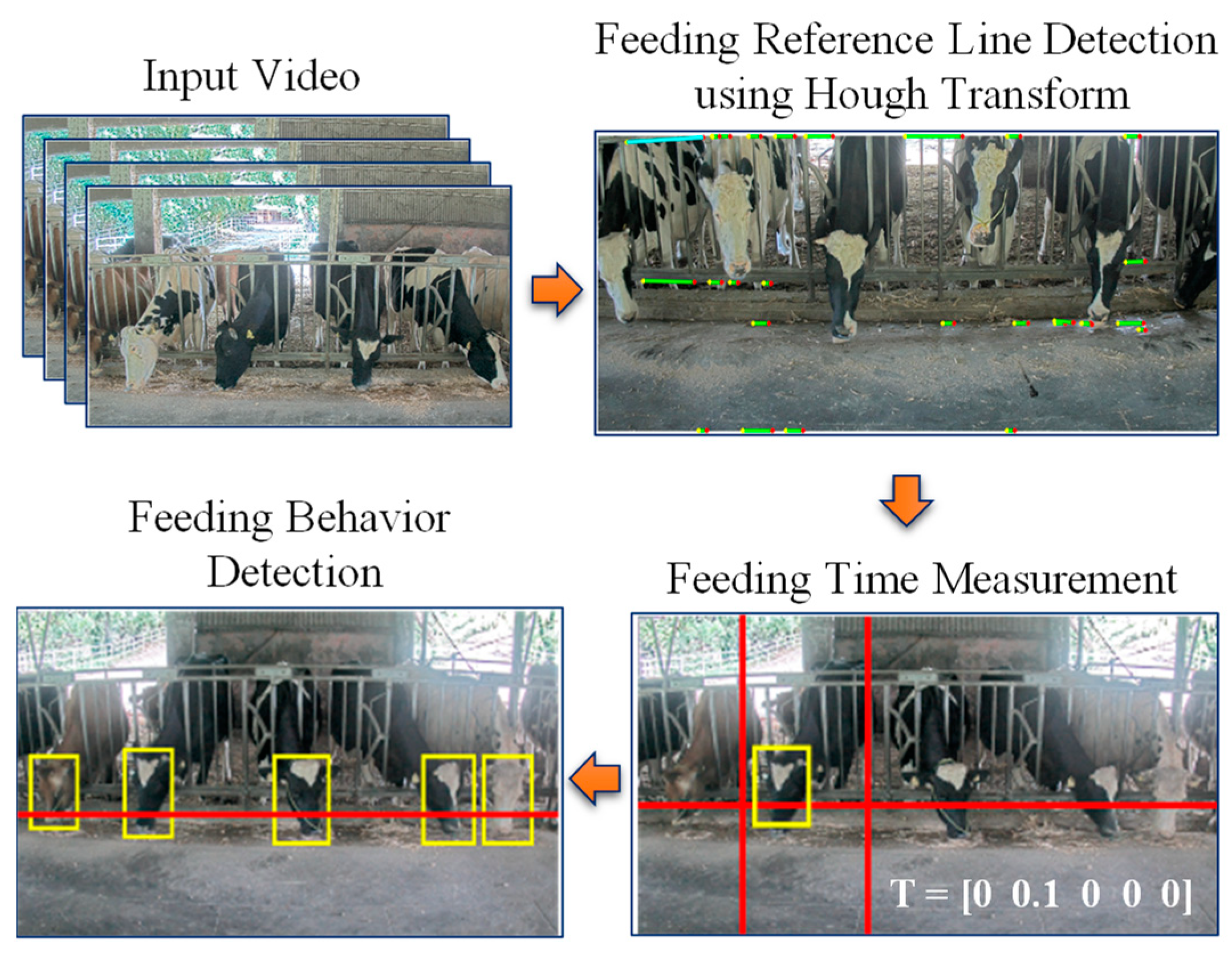
2.2. Feeding Time Estimation
2.2.1. Preprocessing
2.2.2. Reference Line Detection for Feeding Behavior Detection
2.2.3. Detection of Feeding Behavior
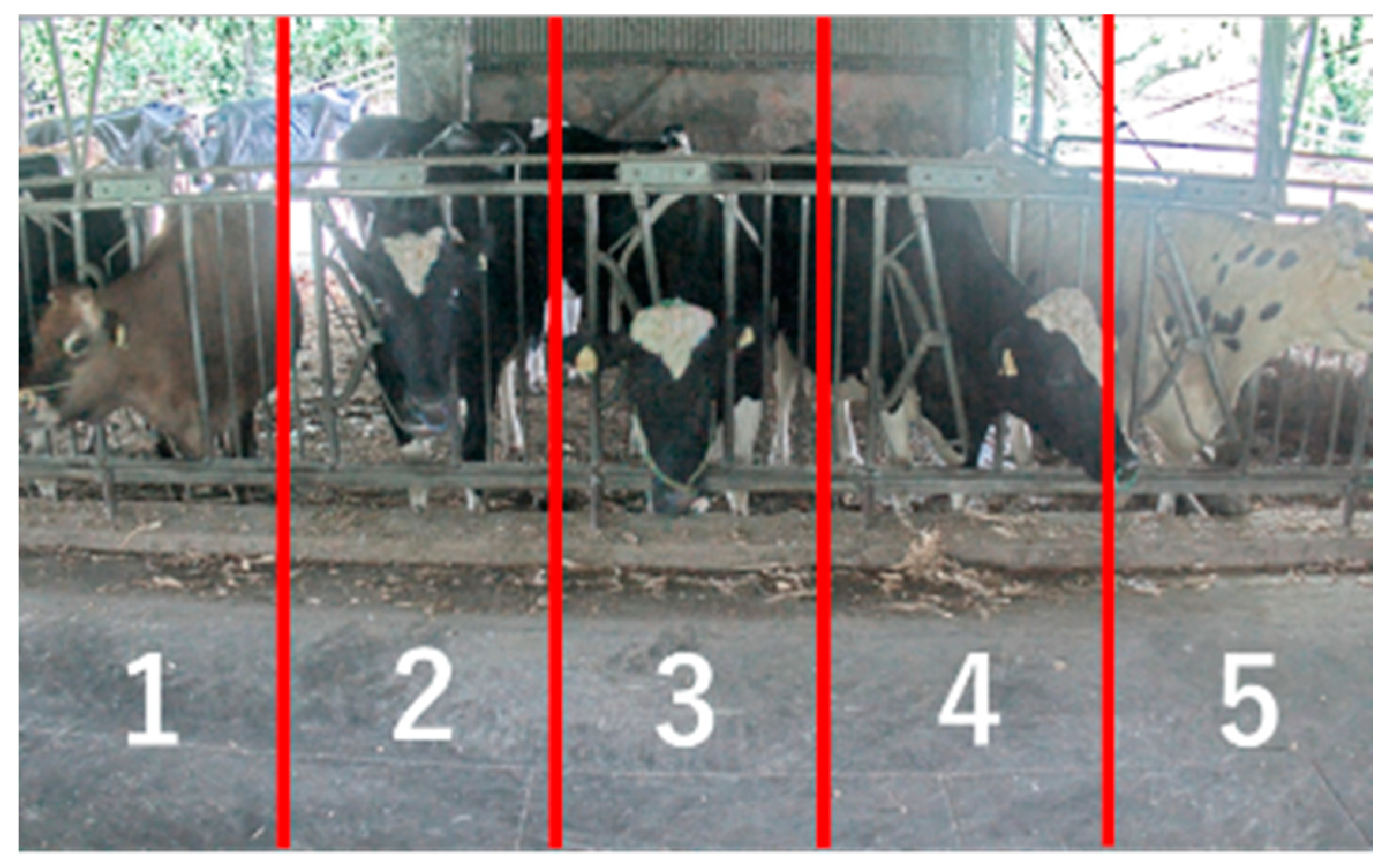
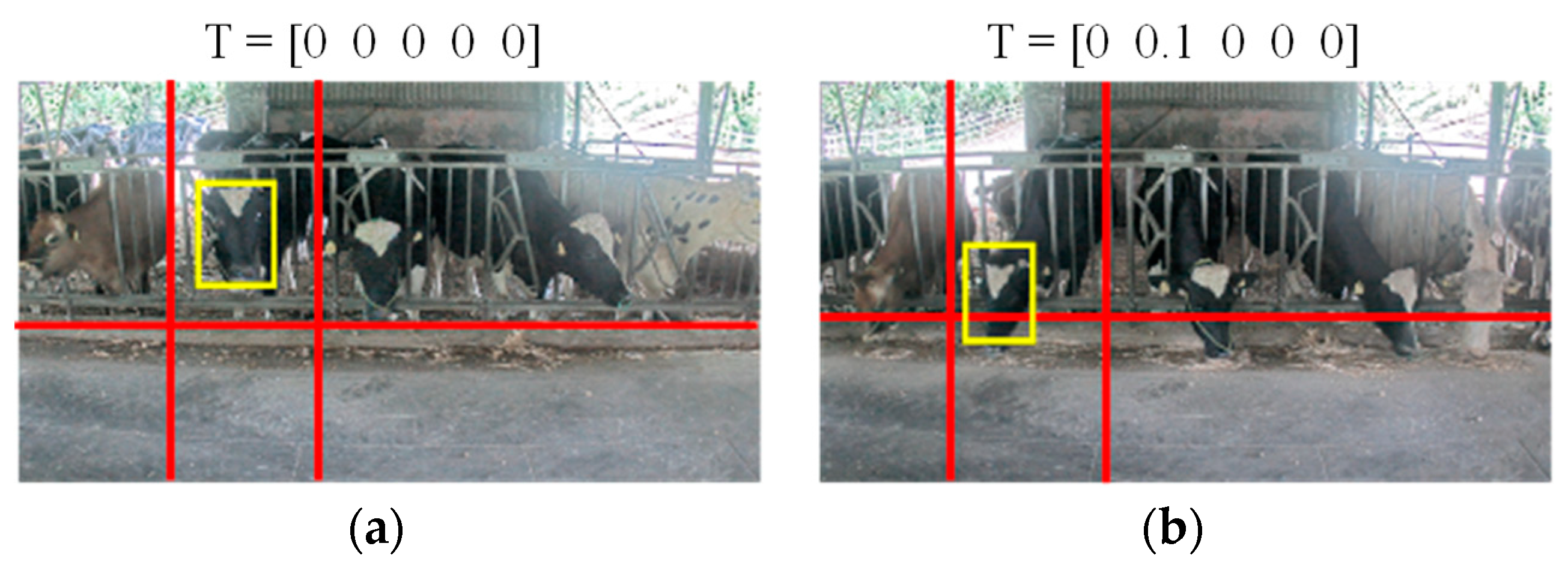
2.2.4. Region Segmentation of Images and Creation of Feeding Time Matrices
2.2.5. Bounding Box Existence Area Identification
2.2.6. Feeding Time Estimation
3. Results
3.1. Cow Head Region Detection
3.2. Individual Identification
3.3. Feeding Time Estimation
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ministry of Agriculture, Forestry and Fisheries, Livestock Statistics Survey, Livestock Statistics, Dairy Cattle, and Beef Cattle, Number of Houses and Number of Cattle. Available online: https://www.maff.go.jp/j/tokei/kouhyou/tikusan/ (accessed on 15 February 2023).
- Present Situation of Japanese Dairy Farming (National Survey). Available online: https://www.dairy.co.jp/news/kulbvq000000mybw-img/kulbvq000000myd8.pdf (accessed on 15 February 2023).
- Zin, T.T.; Misawa, S.; Pwint, M.Z.; Thant, S.; Seint, P.T.; Sumi, K.; Yoshida, K. Cow Identification System using Ear Tag Recognition. In Proceedings of the 2020 IEEE 2nd Global Conference on Life Sciences and Technologies (LifeTech), Kyoto, Japan, 10–12 March 2020. [Google Scholar] [CrossRef]
- González, L.A.; Tolkamp, B.J.; Coffey, M.P.; Ferret, A.; Kyriazakis, I. Changes in Feeding Behavior as Possible Indicators for the Automatic Monitoring of Health Disorders in Dairy Cows. J. Dairy Sci. 2008, 91, 1017–1028. [Google Scholar] [CrossRef] [PubMed]
- Bao, J.; Giller, P.S. Observations on the changes in behavioral activities of dairy cows prior to and after parturition. Ir. Vet. J. 1991, 44, 43–47. [Google Scholar]
- Schirmann, K.; Chapinal, N.; Weary, D.M.; Vickers, L.; Von Keyserlingk, M.A.G. Rumination, and feeding behavior before and after calving in dairy cows. J. Dairy Sci. 2013, 96, 7088–7092. [Google Scholar] [CrossRef]
- Büchel, S.; Sundrum, A. Decrease in rumination time as an indicator of the onset of calving. J. Dairy Sci. 2014, 97, 3120–3127. [Google Scholar] [CrossRef] [PubMed]
- Shiiya, K.; Otsuka, F.; Zin, T.T.; Kobayashi, I. Image-Based Feeding Behavior Detection for Dairy Cow. In Proceedings of the 2019 IEEE 8th Global Conference on Consumer Electronics (GCCE), Osaka, Japan, 15–18 October 2019. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. arXiv 2016, arXiv:1506.02640. [Google Scholar]
- Kawagoe, Y.; Zin, T.T.; Kobayashi, I. Individual Identification of Cow Using Image Processing Techniques. In Proceedings of the 2022 IEEE 4th Global Conference on Life Sciences and Technologies (Life Tech), Osaka, Japan, 7–9 March 2022. [Google Scholar] [CrossRef]
- Iandola, F.N.; Han, S.; Moskewicz, M.W.; Ashraf, K.; Dally, W.J.; Keutzer, K. SqueezeNet: AlexNet-level accuracy with 50x fewer parameters and <0.5 MB model size. arXiv 2016, arXiv:1602.07360. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. arXiv 2015, arXiv:1512.03385. [Google Scholar]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the Inception Architecture for Computer Vision. arXiv 2015, arXiv:1512.00567. [Google Scholar]
- Kumar, S.; Singh, S.K. Automatic identification of cattle using muzzle point pattern: A hybrid feature extraction and classification paradigm. Multimed. Tools Appl. 2017, 76, 26551–26580. [Google Scholar] [CrossRef]
- Yu, Z.; Liu, Y.; Yu, S.; Wang, R.; Song, Z.; Yan, Y.; Li, F.; Wang, Z.; Tian, F. Automatic Detection Method of Dairy Cow Feeding Behaviour Based on YOLO Improved Model and Edge Computing. Sensors 2022, 22, 3271. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Yang, T.; Mai, K.; Liu, C.; Xiong, J.; Kuang, Y.; Gao, Y. Holstein Cattle Face Re-Identification Unifying Global and Part Feature Deep Network with Attention Mechanism. Animals 2022, 12, 1047. [Google Scholar] [CrossRef] [PubMed]
- Achour, B.; Belkadi, M.; Filali, I.; Laghrouche, M.; Lahdir, M. Image analysis for individual identification and feeding behavior monitoring of dairy cows based on Convolutional Neural Networks (CNN). Biosyst. Eng. 2020, 198, 31–49. [Google Scholar] [CrossRef]
- Zhao, K.; Jin, X.; Ji, J.; Wang, J.; Ma, H.; Zhu, X. Individual identification of Holstein dairy cows based on detecting and matching feature points in body images. Biosyst. Eng. 2019, 181, 128–139. [Google Scholar] [CrossRef]
- Zin, T.T.; Phyo, C.N.; Tin, P.; Hama, H.; Kobayashi, I. Image technology based cow identification system using deep learning. In Proceedings of the International MultiConference of Engineers and Computer Scientists (IMECS2018), Hong Kong, China, 14–16 March 2018; pp. 320–323. [Google Scholar]
- Yang, Z.; Xiong, H.; Chen, X.; Liu, H.; Kuang, Y.; Gao, Y. Dairy cow tiny face recognition based on convolutional neural networks. In Proceedings of the 14th Chinese Conference on Biometric Recognition, Zhuzhou, China, 12–13 October 2019; pp. 216–222. [Google Scholar]
- Zhang, R.; Ji, J.; Zhao, K.; Wang, J.; Zhang, M.; Wang, M. A Cascaded Individual Cow Identification Method Based on DeepOtsu and EfficientNet. Agriculture 2023, 13, 279. [Google Scholar] [CrossRef]
- Antanaitis, R.; Anskienė, L.; Palubinskas, G.; Džermeikaitė, K.; Bačėninaitė, D.; Viora, L.; Rutkauskas, A. Ruminating, Eating, and Locomotion Behavior Registered by Innovative Technologies around Calving in Dairy Cows. Animals 2023, 13, 1257. [Google Scholar] [CrossRef] [PubMed]
- Ding, L.; Lv, Y.; Jiang, R.; Zhao, W.; Li, Q.; Yang, B.; Yu, L.; Ma, W.; Gao, R.; Yu, Q. Predicting the Feed Intake of Cattle Based on Jaw Movement Using a Triaxial Accelerometer. Agriculture 2022, 12, 899. [Google Scholar] [CrossRef]
- Bloch, V.; Frondelius, L.; Arcidiacono, C.; Mancino, M.; Pastell, M. Development and Analysis of a CNN- and Transfer-Learning-Based Classification Model for Automated Dairy Cow Feeding Behavior Recognition from Accelerometer Data. Sensors 2023, 23, 2611. [Google Scholar] [CrossRef] [PubMed]
- Pires, B.V.; Reolon, H.G.; Abduch, N.G.; Souza, L.L.; Sakamoto, L.S.; Mercadante, M.E.Z.; Silva, R.M.O.; Fragomeni, B.O.; Baldi, F.; Paz, C.C.P.; et al. Effects of Feeding and Drinking Behavior on Performance and Carcass Traits in Beef Cattle. Animals 2022, 12, 3196. [Google Scholar] [CrossRef] [PubMed]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Images | Number of Cows That Were Annotated | Input Size |
|---|---|---|
| 2819 | 11 | 1920 × 1080 |
| Epoch | Minibatch Size | Leaning Rate | Optimization Algorithm |
|---|---|---|---|
| 50 | 16 | 0.001 | Momentum SDG |
| Cow Number | Number of Images | Cow Number | Number of Images |
|---|---|---|---|
| cow1 | 4117 | cow11 | 4321 |
| cow2 | 4287 | cow12 | 4383 |
| cow3 | 3896 | cow13 | 3063 |
| cow4 | 4349 | cow14 | 3440 |
| cow5 | 4246 | cow15 | 2262 |
| cow6 | 4132 | cow16 | 4295 |
| cow7 | 4257 | cow17 | 4235 |
| cow8 | 4227 | cow18 | 4351 |
| cow9 | 4113 | cow19 | 4164 |
| cow10 | 4158 | cow20 | 2495 |
| cow21 | 4379 |
| Detected Line | Y-Coordinate |
|---|---|
| 1 | 2 |
| 2 | 2 |
| 3 | 2 |
| 12 | 775 |
| 13 | 777 |
| 14 | 781 |
| 15 | 979 |
| 16 | 993 |
| 25 | 1562 |
| 26 | 1562 |
| 27 | 1562 |
| Video | Number of Detections | Number of Undetected | False Positives | Detection Rate | Accuracy |
|---|---|---|---|---|---|
| 1 | 988 | 8 | 32 | 99.2 | 96.1 |
| 2 | 1038 | 6 | 3 | 99.4 | 99.1 |
| 3 | 1202 | 64 | 3 | 94.9 | 94.7 |
| 4 | 1173 | 8 | 3 | 99.3 | 99.1 |
| 5 | 1106 | 28 | 110 | 91.0 | 88.9 |
| 6 | 1095 | 43 | 10 | 99.1 | 95.4 |
| 7 | 1133 | 50 | 86 | 92.9 | 89.3 |
| 8 | 1150 | 122 | 223 | 83.8 | 76.9 |
| Video | SqueezeNet | ResNet-18 | ResNet-50 | ResNet-101 | Inception-V3 |
|---|---|---|---|---|---|
| 1 | 97.9 | 98.7 | 99.2 | 99.2 | 99.7 |
| 2 | 97.0 | 99.9 | 99.7 | 100 | 99.8 |
| 3 | 89.3 | 99.8 | 99.9 | 99.8 | 99.9 |
| 4 | 75.4 | 95.7 | 96.2 | 100 | 99.1 |
| 5 | 99.5 | 99.8 | 99.9 | 100 | 100 |
| 6 | 98.7 | 98.8 | 99.1 | 99.4 | 99.2 |
| 7 | 94.1 | 94.9 | 96.3 | 94.9 | 97.0 |
| Video | Cow | Estimated Time (s) | Visual (s) | Number of Detections | Number of Undetected | False Positives | Accuracy |
|---|---|---|---|---|---|---|---|
| 1 | J11 | 165 | 263 | 163 | 100 | 1 | 61.7 |
| 9709 | 201 | 246 | 240 | 6 | 0 | 97.6 | |
| 9615 | 264 | 264 | 264 | 0 | 0 | 100 | |
| 9592 | 193 | 254 | 180 | 74 | 0 | 70.9 | |
| 2 | 9779 | 240 | 241 | 238 | 5 | 13 | 93.0 |
| 9817 | 255 | 262 | 255 | 0 | 7 | 97.3 | |
| M60 | 223 | 263 | 223 | 0 | 41 | 84.5 | |
| 9615 | 262 | 258 | 260 | 0 | 2 | 99.2 | |
| 3 | 9779 | 215 | 299 | 215 | 57 | 28 | 71.7 |
| 9642 | 249 | 300 | 244 | 2 | 52 | 81.9 | |
| M35 | 264 | 300 | 263 | 0 | 38 | 87.4 | |
| 4 | M35 | 193 | 300 | 198 | 100 | 3 | 65.8 |
| 9592 | 267 | 300 | 267 | 5 | 27 | 89.3 | |
| 9642 | 293 | 300 | 292 | 1 | 3 | 98.6 | |
| 5 | 9718 | 288 | 288 | 288 | 0 | 0 | 100 |
| 9817 | 285 | 288 | 285 | 3 | 0 | 99.0 | |
| 9707 | 277 | 288 | 266 | 22 | 0 | 92.4 | |
| M60 | 238 | 288 | 212 | 0 | 74 | 74.1 | |
| 6 | M40 | 226 | 288 | 226 | 49 | 0 | 82.2 |
| 9709 | 244 | 277 | 247 | 12 | 1 | 95.0 | |
| 1396 | 264 | 279 | 264 | 5 | 6 | 96.0 | |
| J11 | 180 | 286 | 177 | 101 | 2 | 63.2 | |
| 7 | M69 | 213 | 300 | 211 | 88 | 2 | 70.1 |
| 9825 | 253 | 300 | 226 | 5 | 56 | 78.7 | |
| 9641 | 231 | 300 | 231 | 0 | 70 | 76.7 | |
| 9829 | 265 | 285 | 268 | 24 | 19 | 86.2 | |
| M40 | 132 | 291 | 132 | 162 | 0 | 44.9 | |
| 8 | 9641 | 175 | 290 | 165 | 109 | 0 | 60.2 |
| 9818 | 277 | 300 | 246 | 0 | 25 | 90.8 | |
| 9707 | 266 | 291 | 227 | 2 | 72 | 75.4 | |
| 9825 | 289 | 300 | 288 | 12 | 1 | 95.7 | |
| 9829 | 236 | 290 | 236 | 54 | 1 | 81.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kawagoe, Y.; Kobayashi, I.; Zin, T.T. Facial Region Analysis for Individual Identification of Cows and Feeding Time Estimation. Agriculture 2023, 13, 1016. https://doi.org/10.3390/agriculture13051016
Kawagoe Y, Kobayashi I, Zin TT. Facial Region Analysis for Individual Identification of Cows and Feeding Time Estimation. Agriculture. 2023; 13(5):1016. https://doi.org/10.3390/agriculture13051016
Chicago/Turabian StyleKawagoe, Yusei, Ikuo Kobayashi, and Thi Thi Zin. 2023. "Facial Region Analysis for Individual Identification of Cows and Feeding Time Estimation" Agriculture 13, no. 5: 1016. https://doi.org/10.3390/agriculture13051016