
Design and Test of an Automatic Navigation Fruit-Picking Platform
Abstract
:1. Introduction
2. Materials and Methods
2.1. Machine Structure and Working Principle
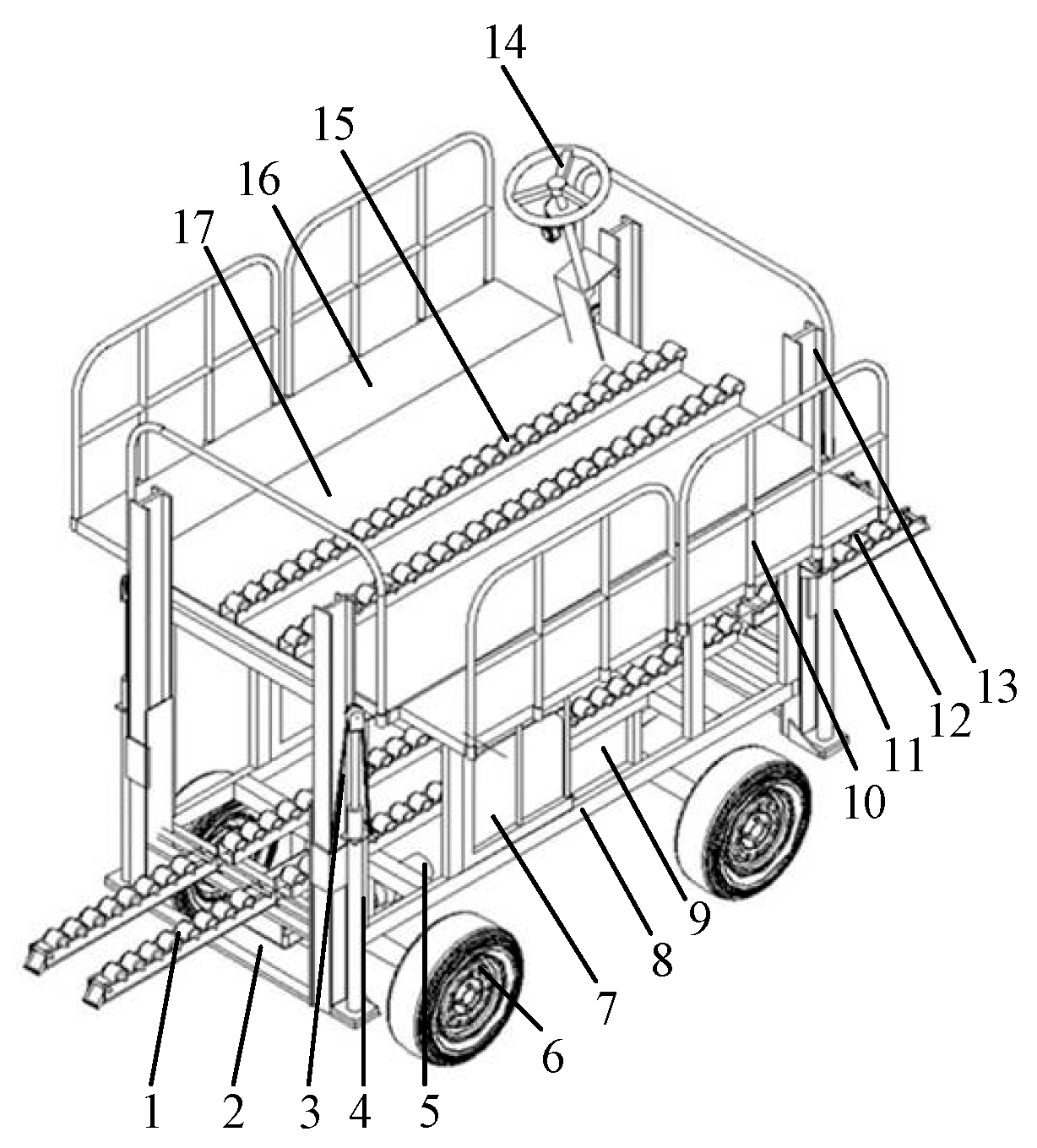
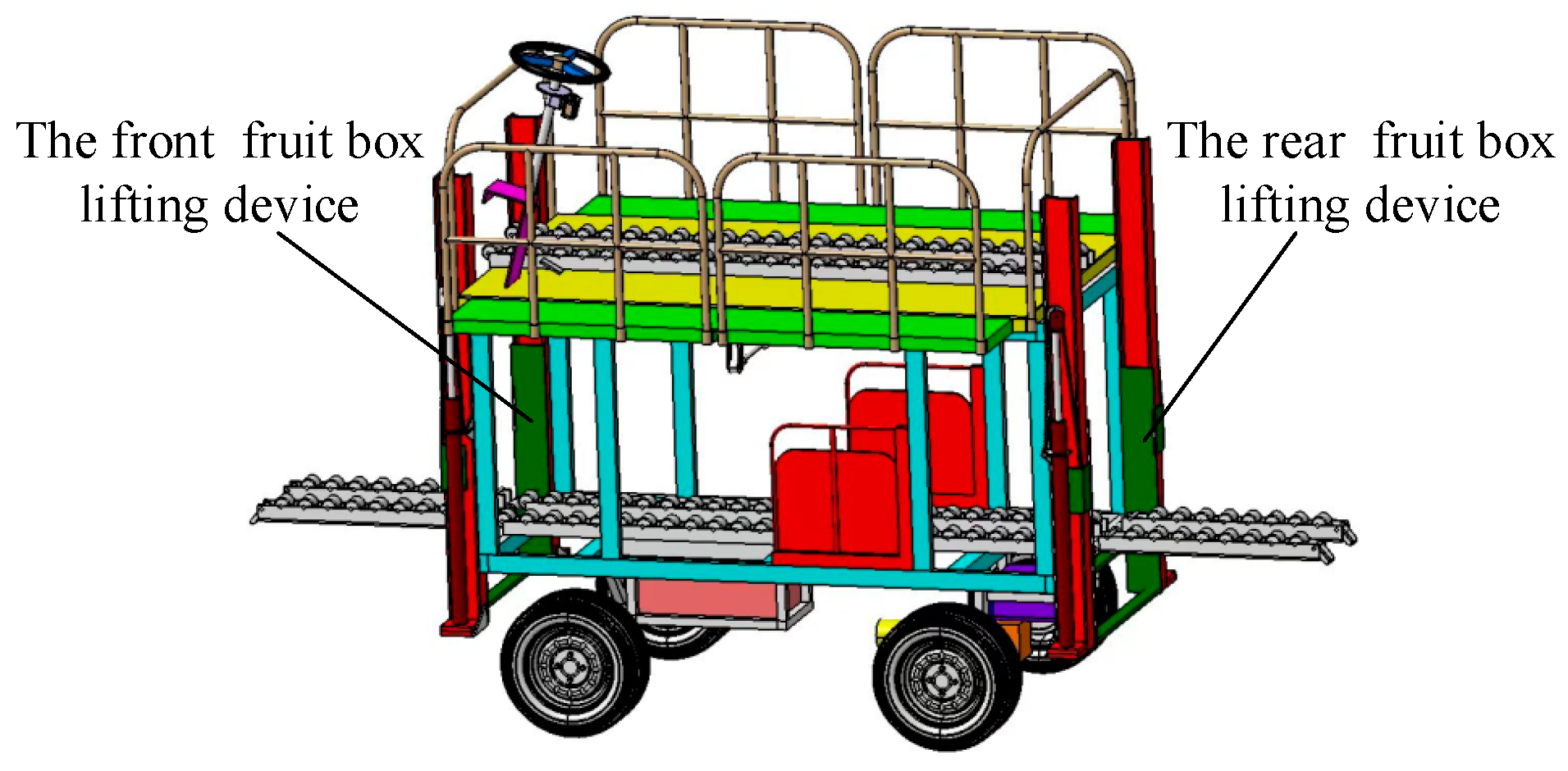
2.1.1. Machine Structure
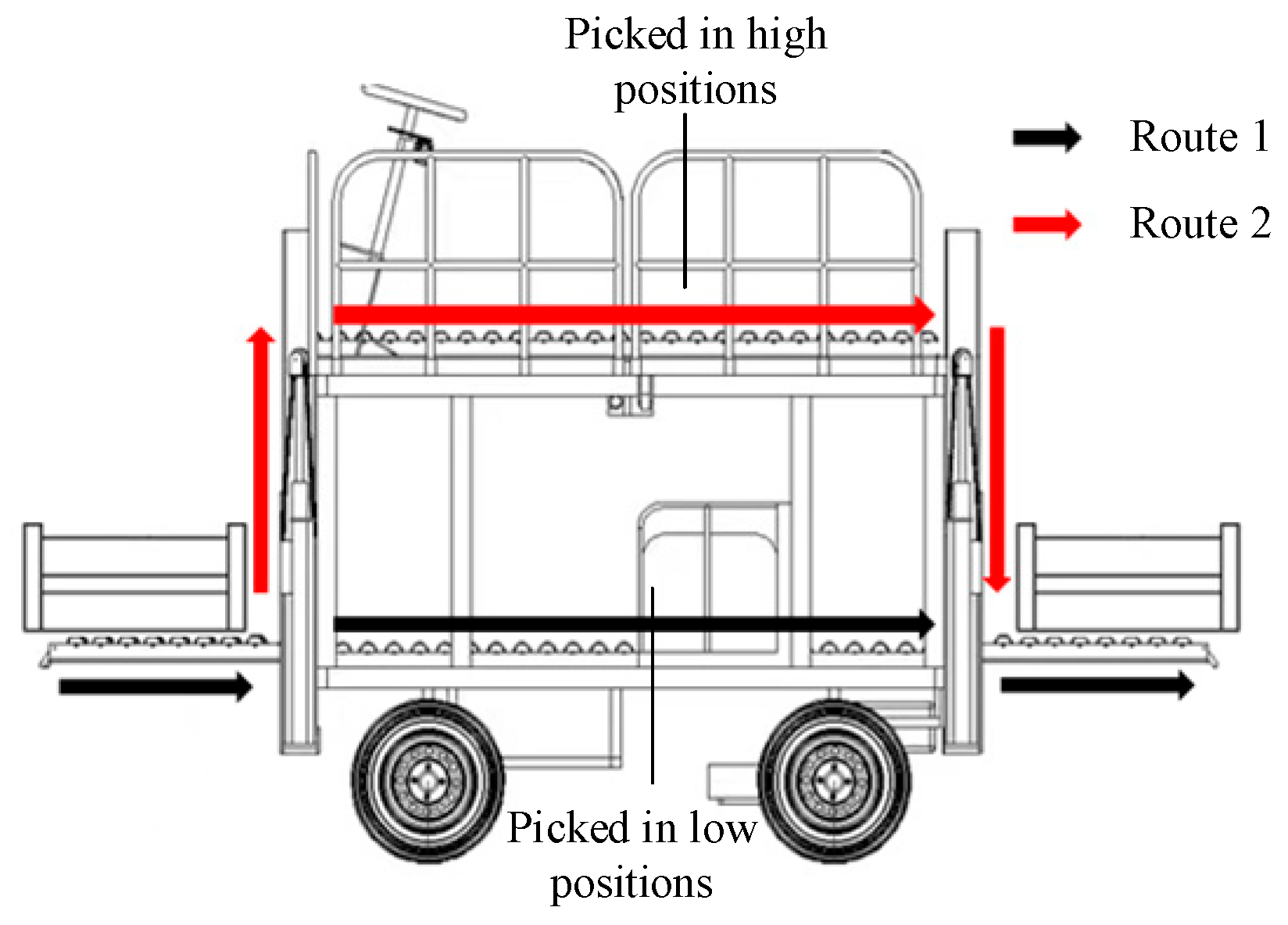
2.1.2. Working Principle
2.2. Key Component Design
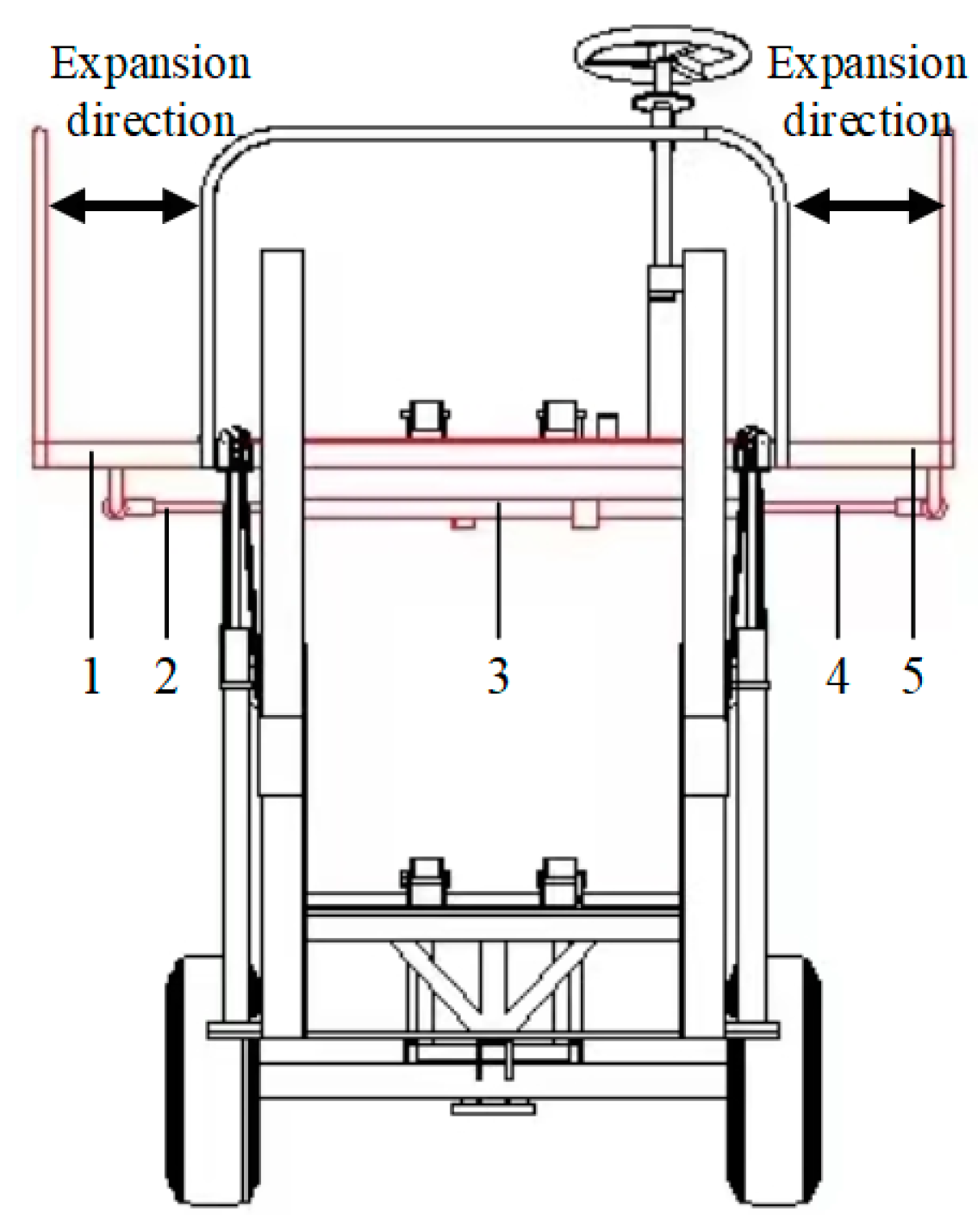
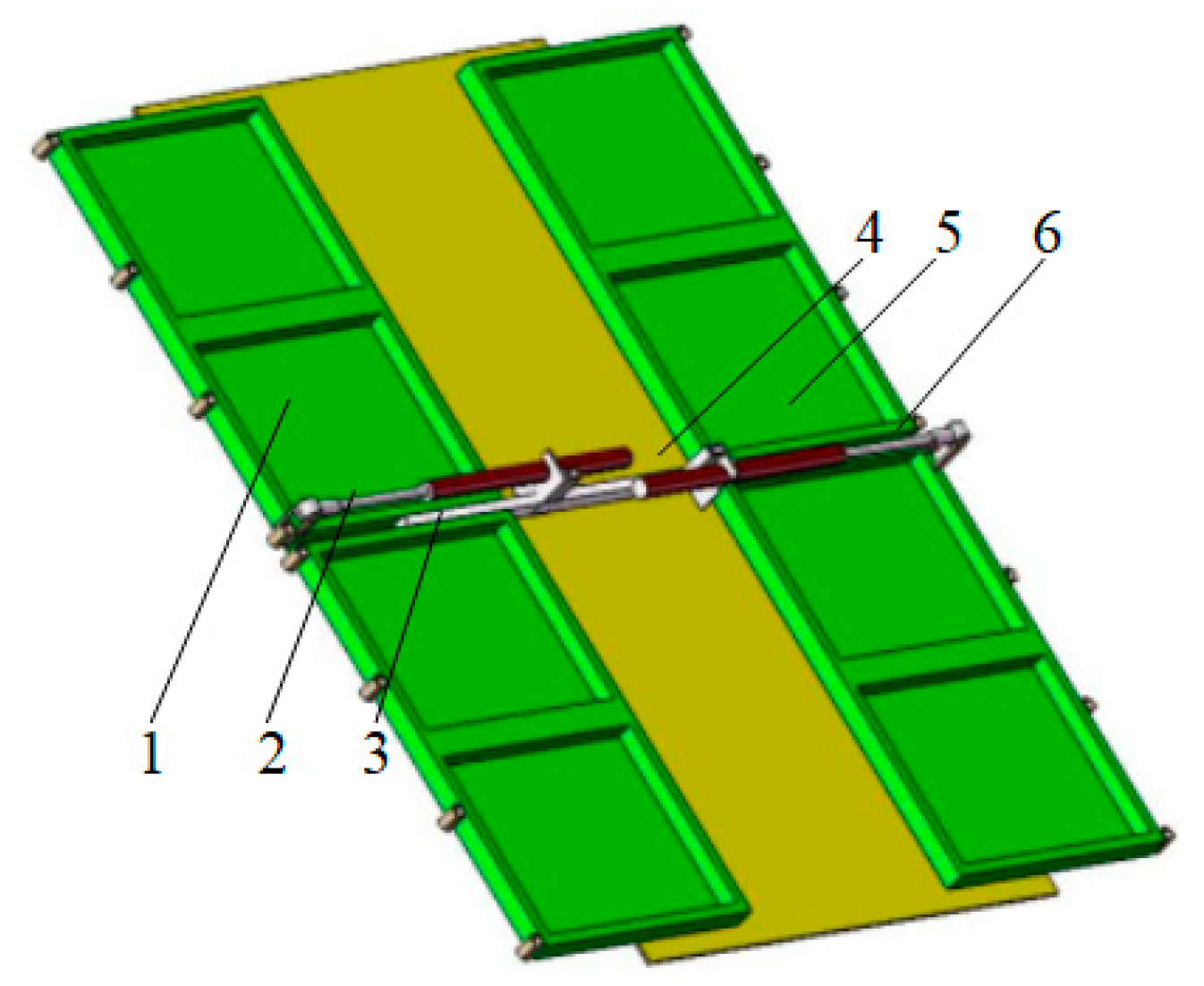
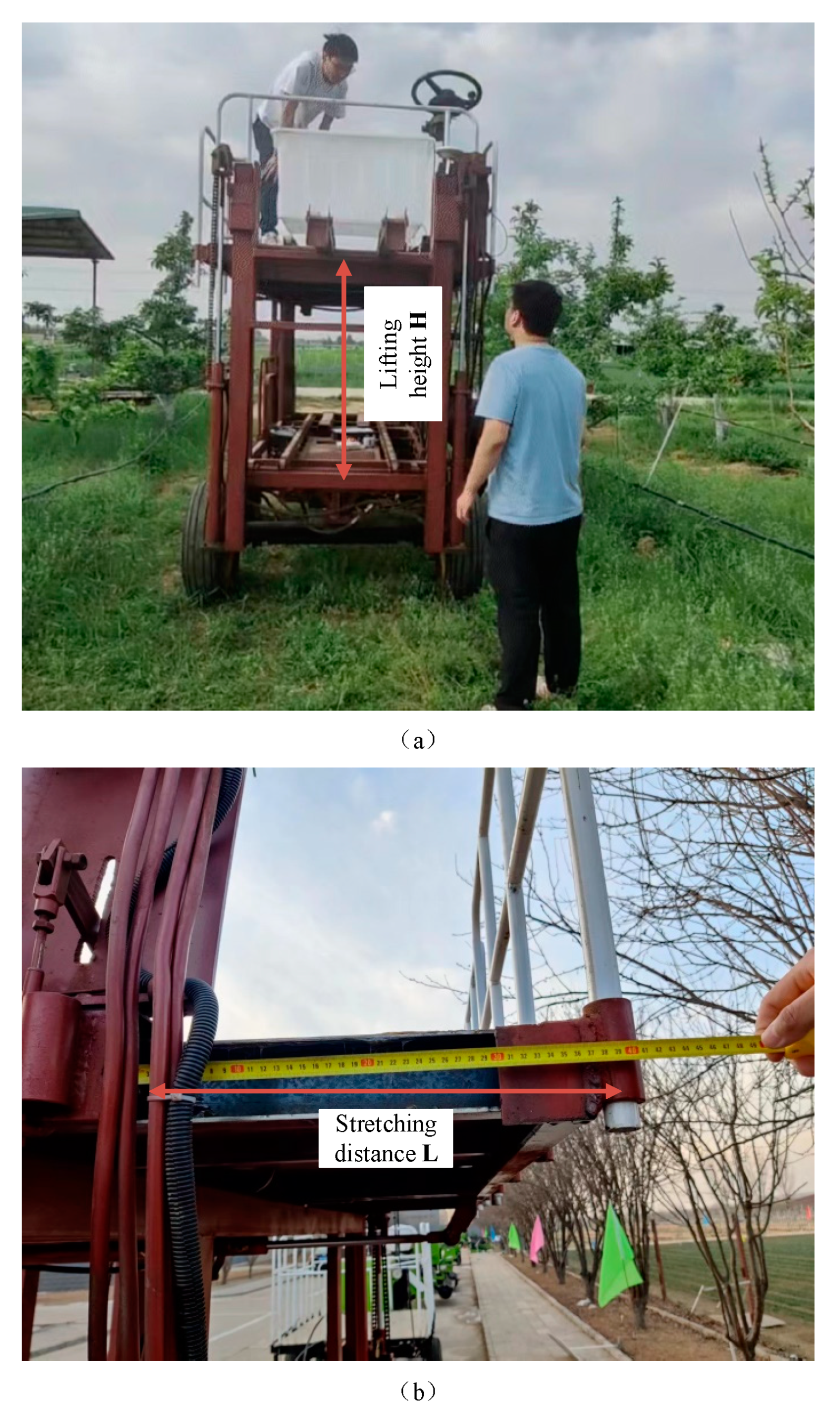
2.2.1. Design of High-Level Extendable Working Platform
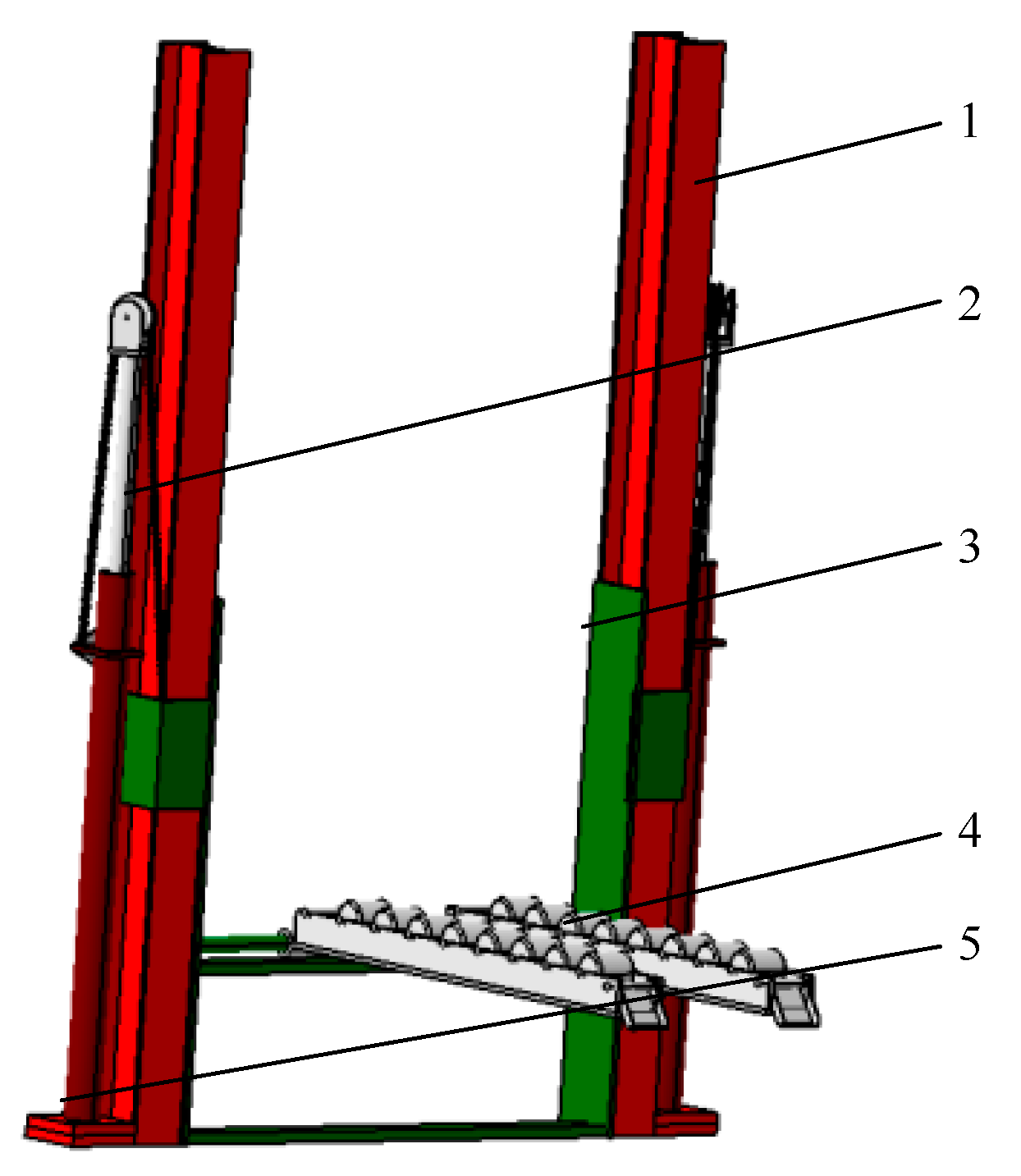
2.2.2. Design of the Fruit-Box-Lifting Devices
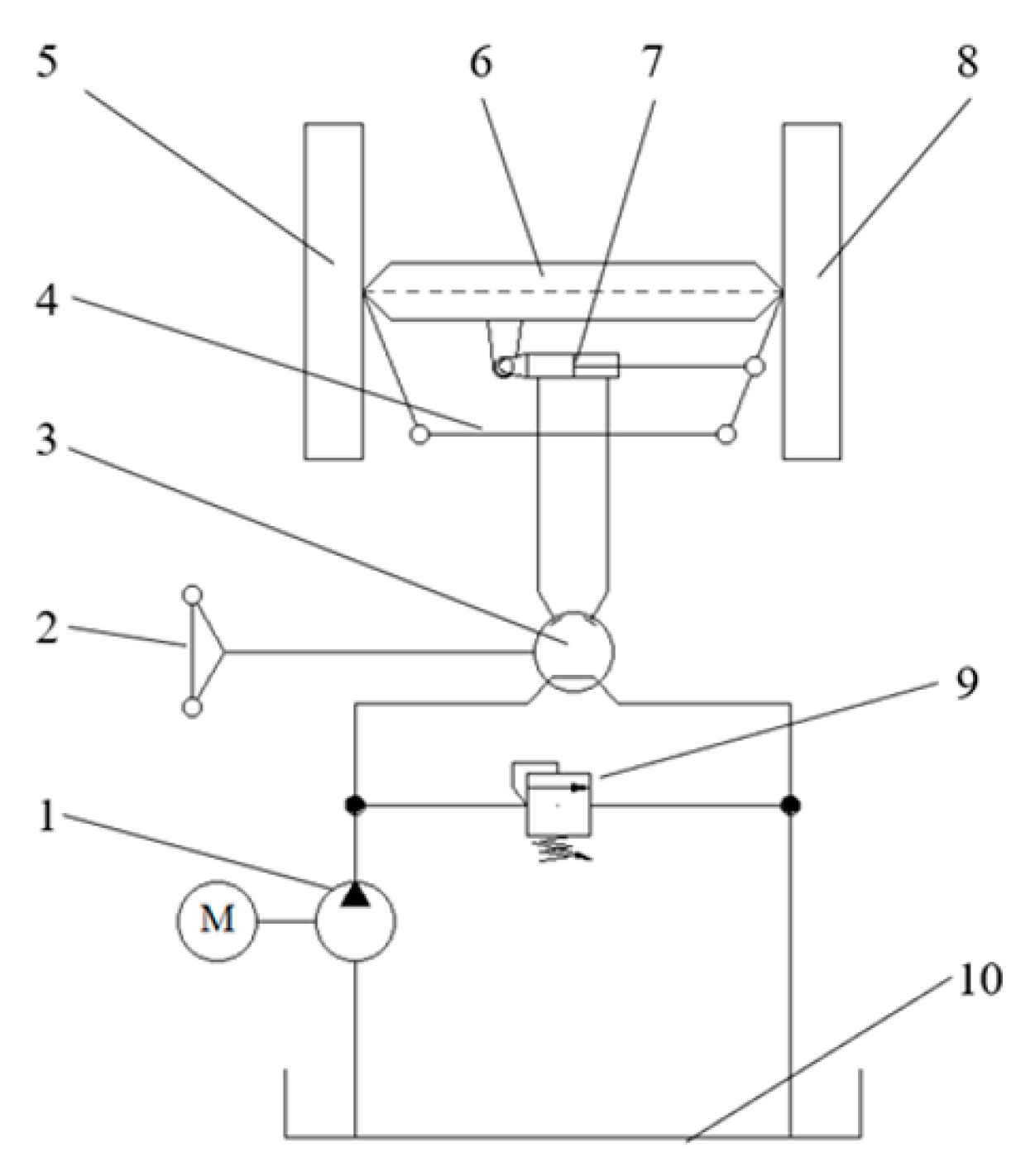
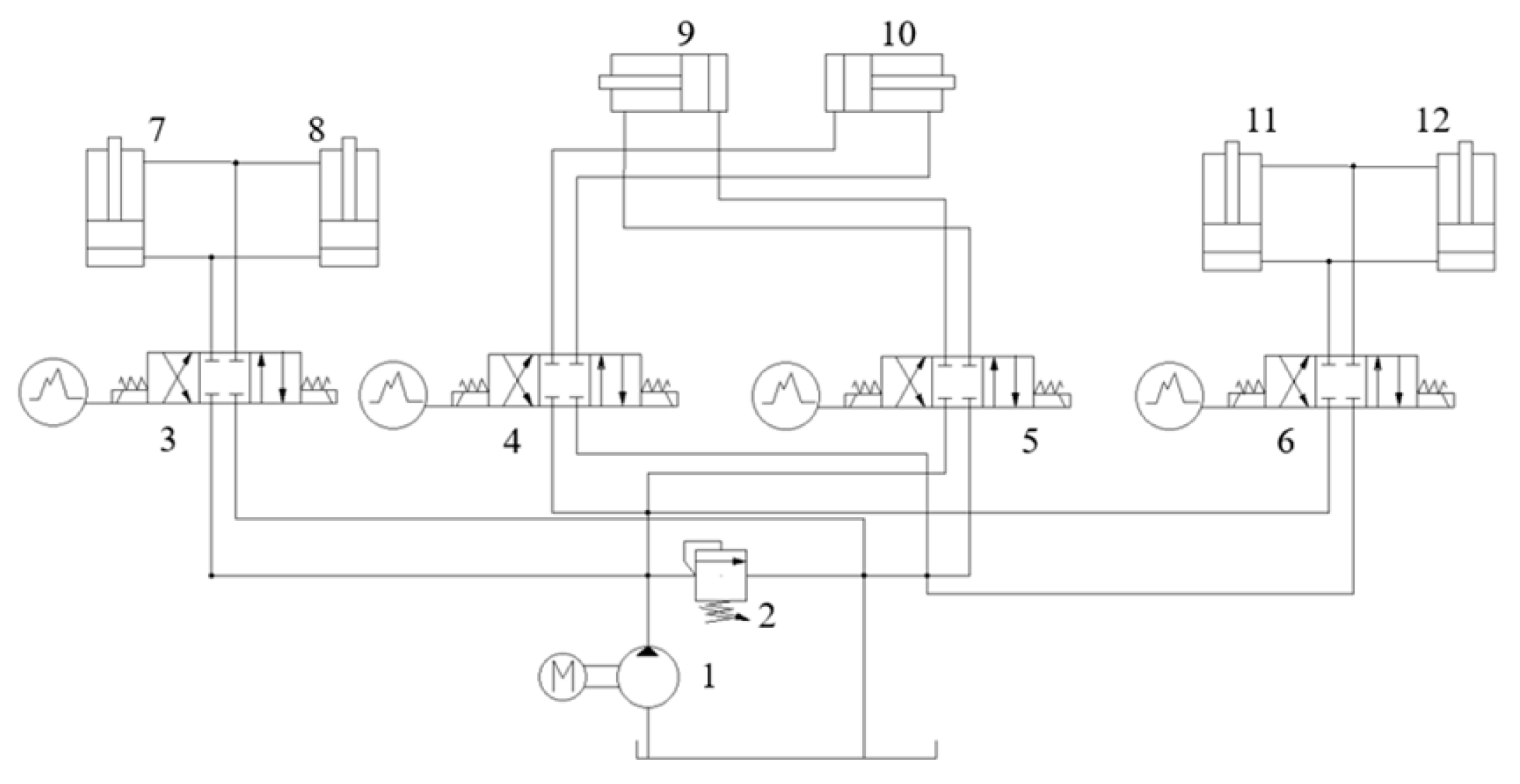
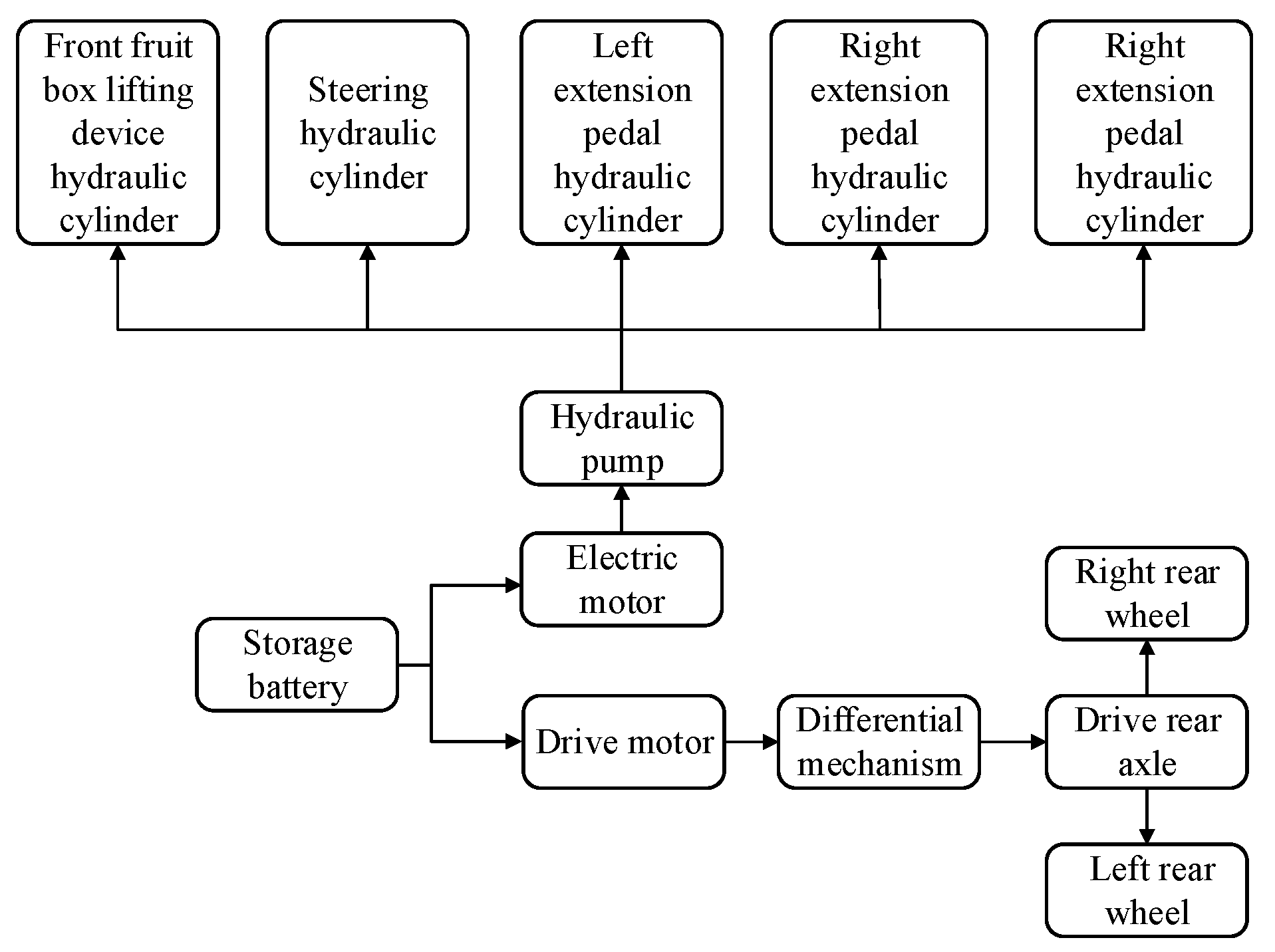
2.2.3. Design of the Drive System
2.3. Design of the Voice Control System
2.3.1. Functional Requirements and Principles of the System
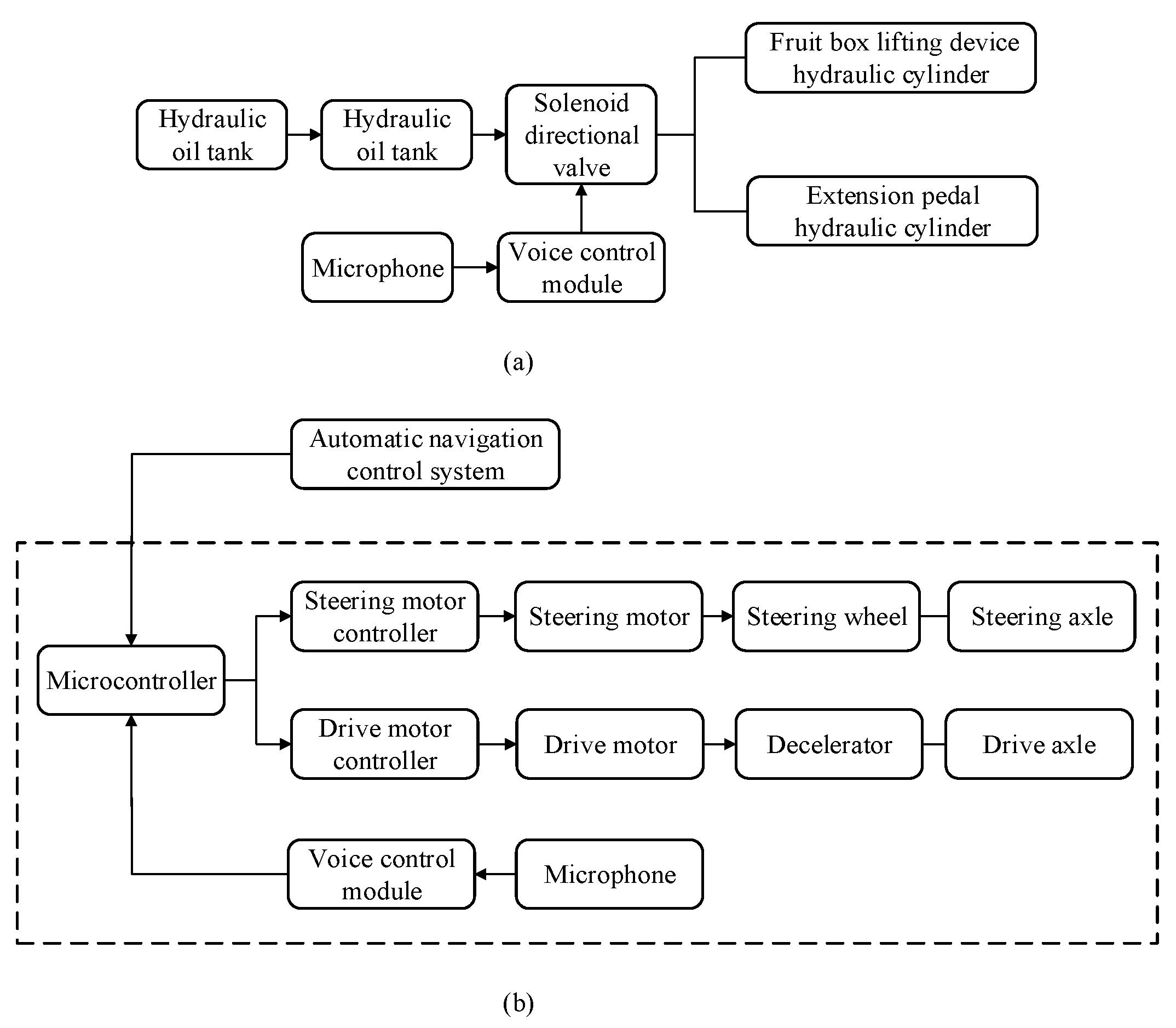
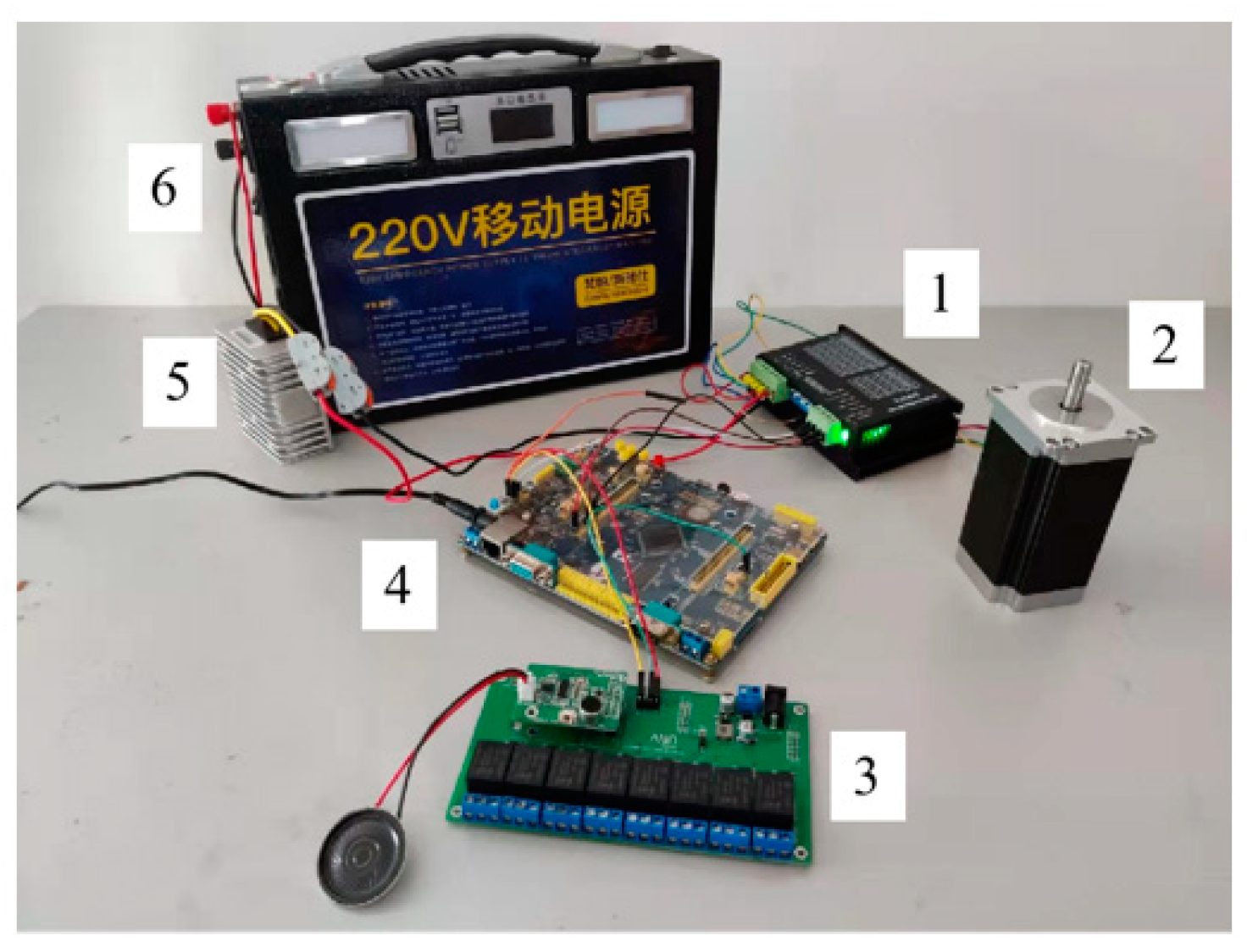
2.3.2. Design of the Voice Control System
- (1)
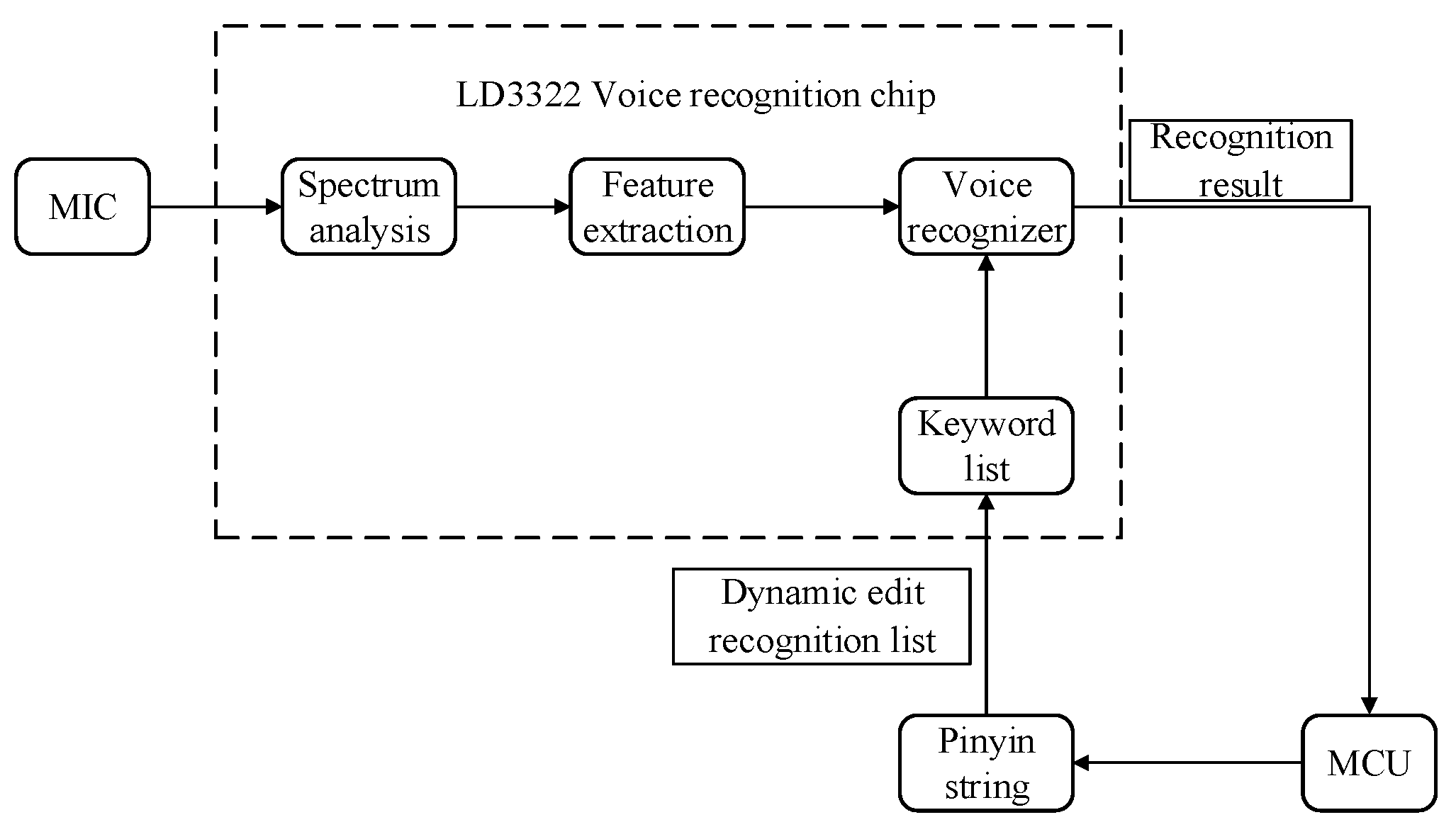
- Voice control chip
- (2)
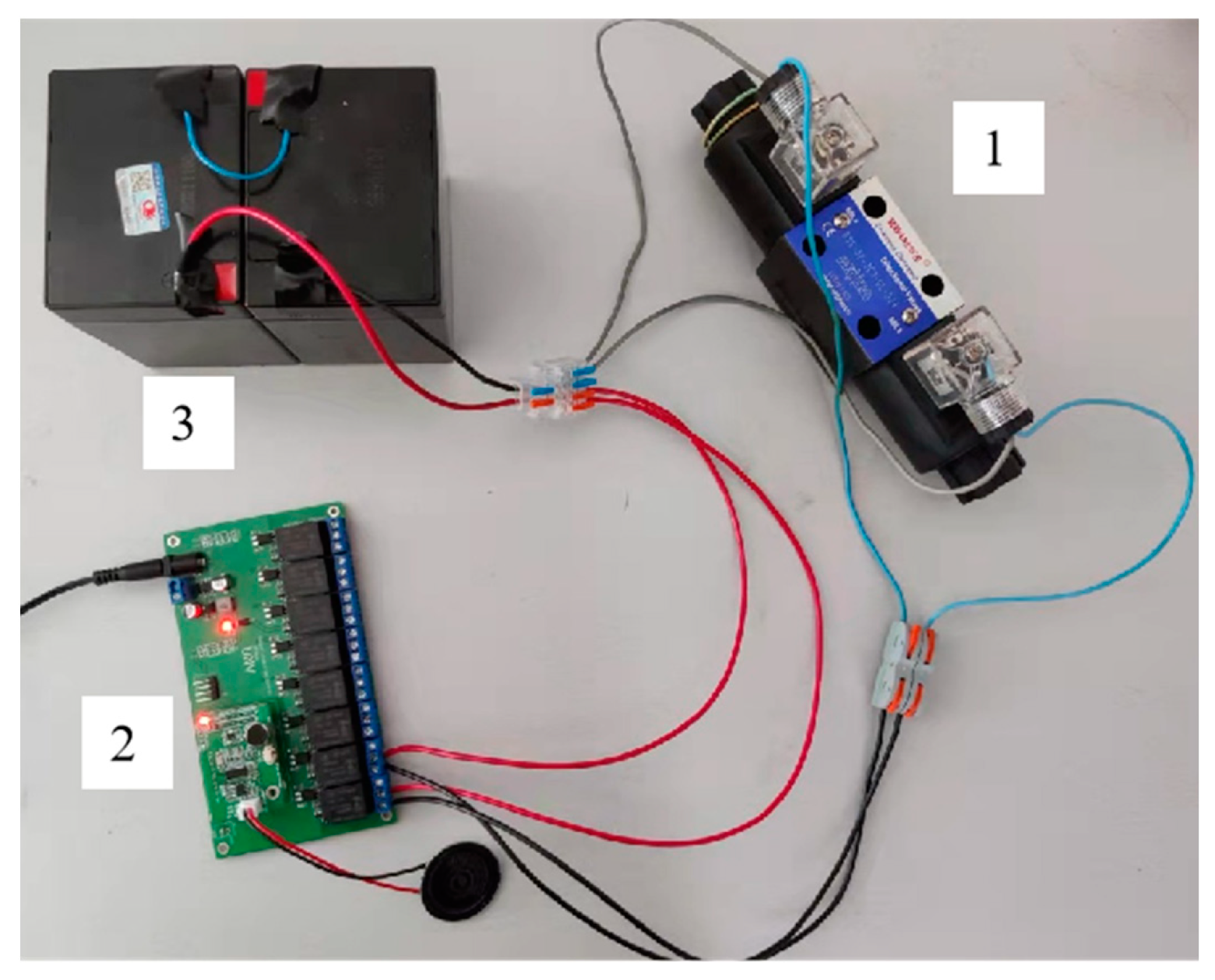
- Voice control system Debugging
2.4. Design of the Automatic Navigation System
2.4.1. Functional Requirements and Principles of the System
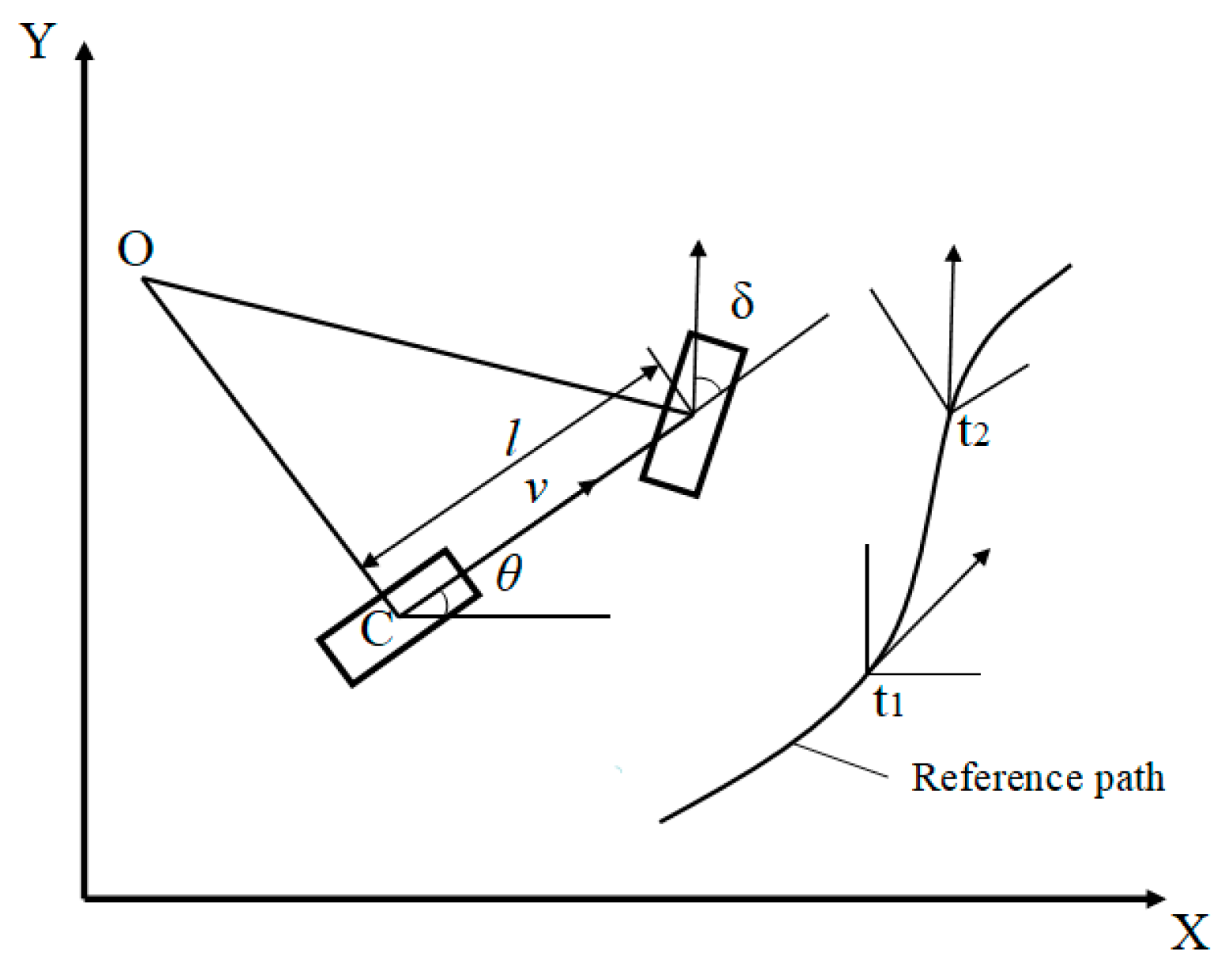
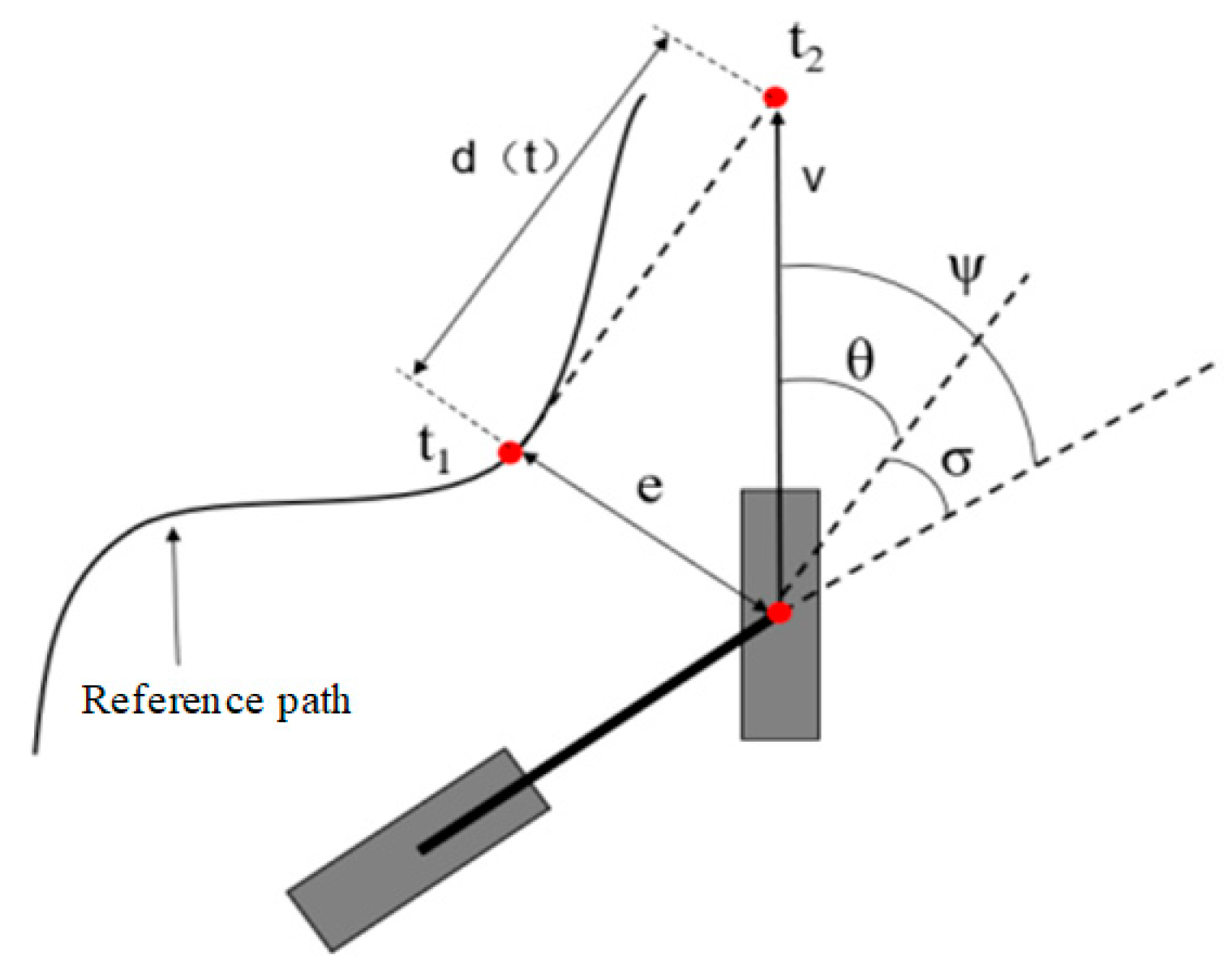
2.4.2. Path-Tracking Control Algorithm
2.4.3. The Working Process of the Automatic Navigation System
3. Results and Discussion
3.1. Manufacturing and Testing the Fruit-Picking Platform
Manufacturing the Prototype
3.2. Testing the Prototype
3.2.1. Test Conditions and Materials
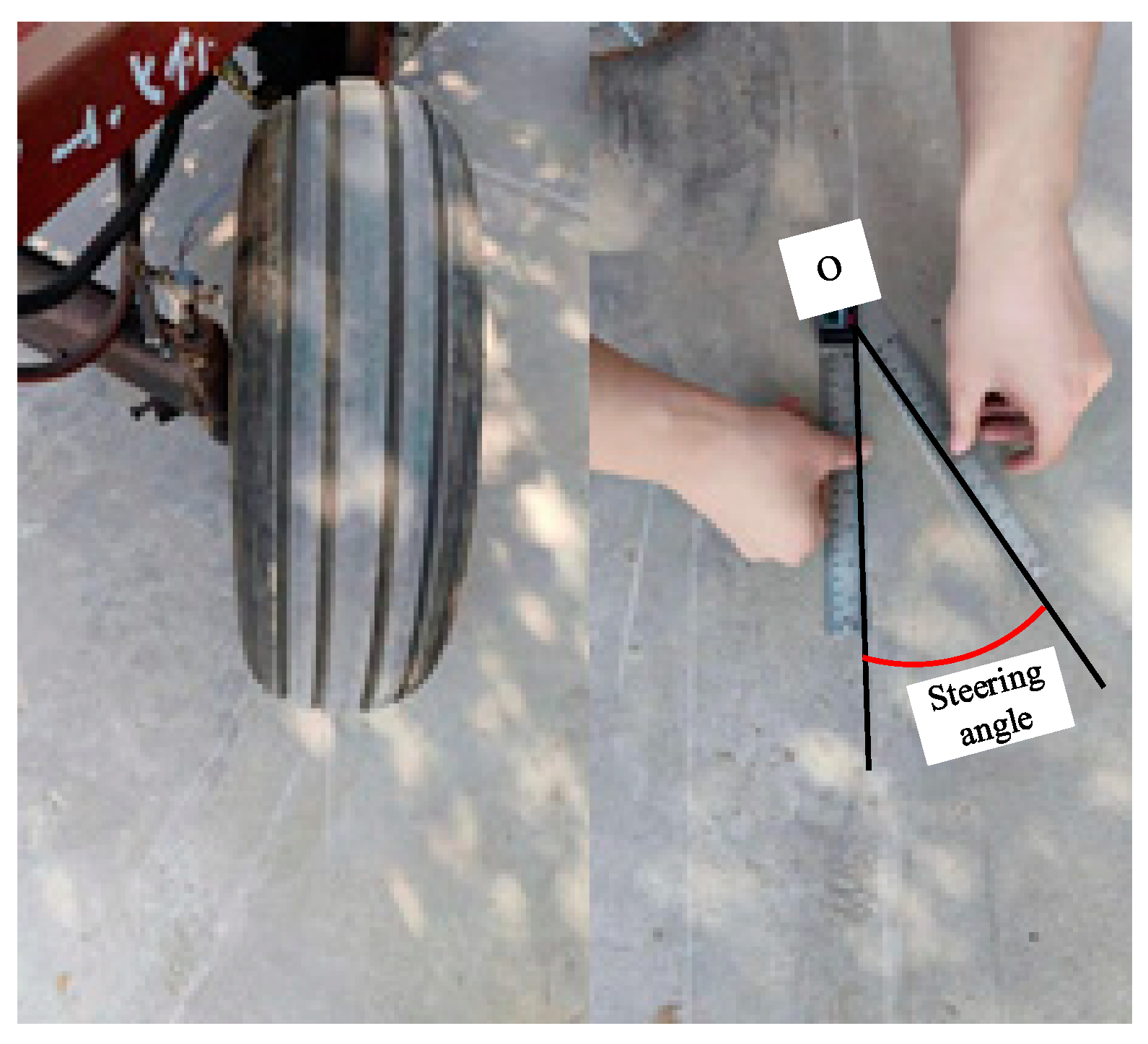
3.2.2. Steering Function Tests of the Picking Platform
- (1)
- Steering angle test
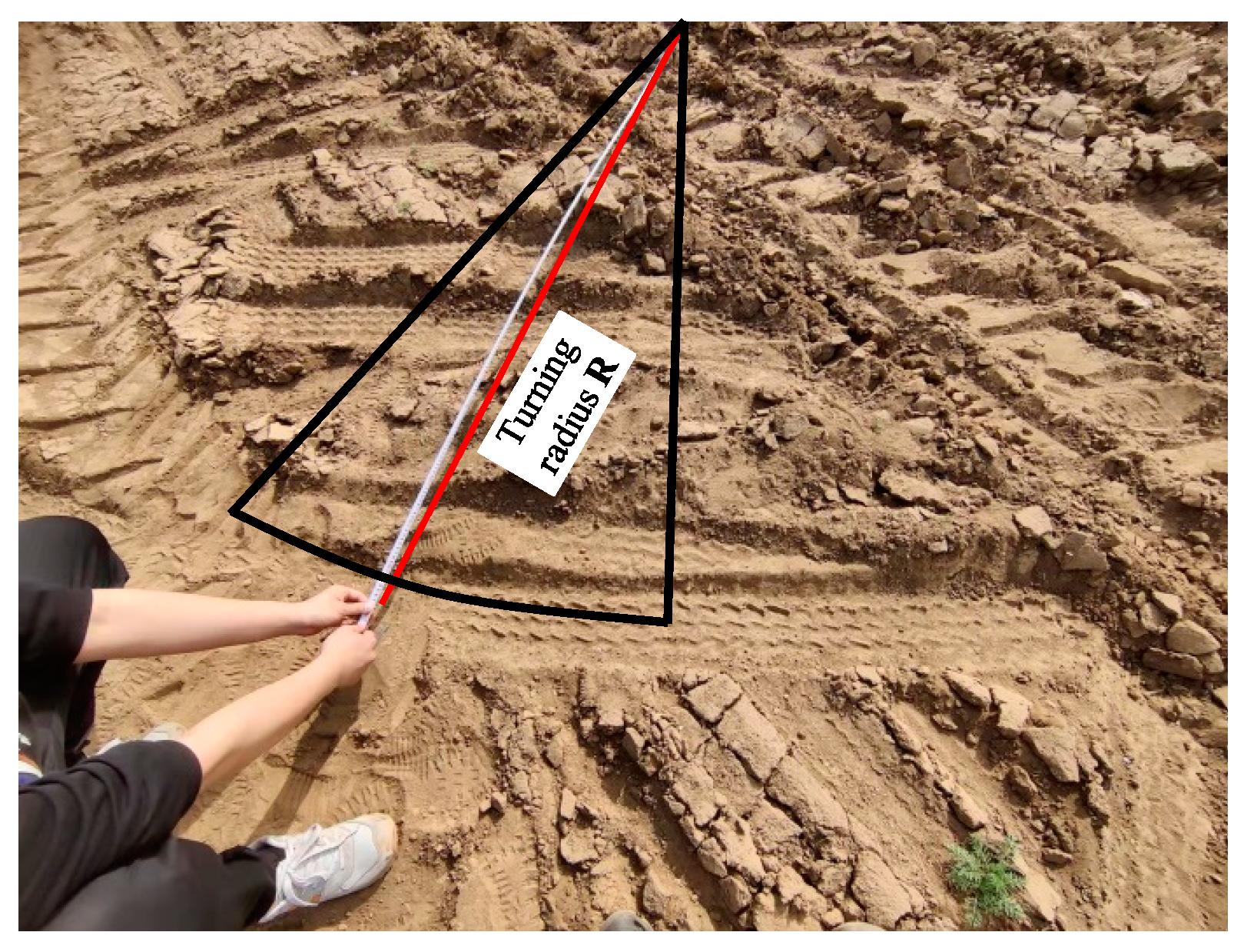
- (2)
- Turning radius test
3.2.3. Voice Control Tests of the Picking Platform
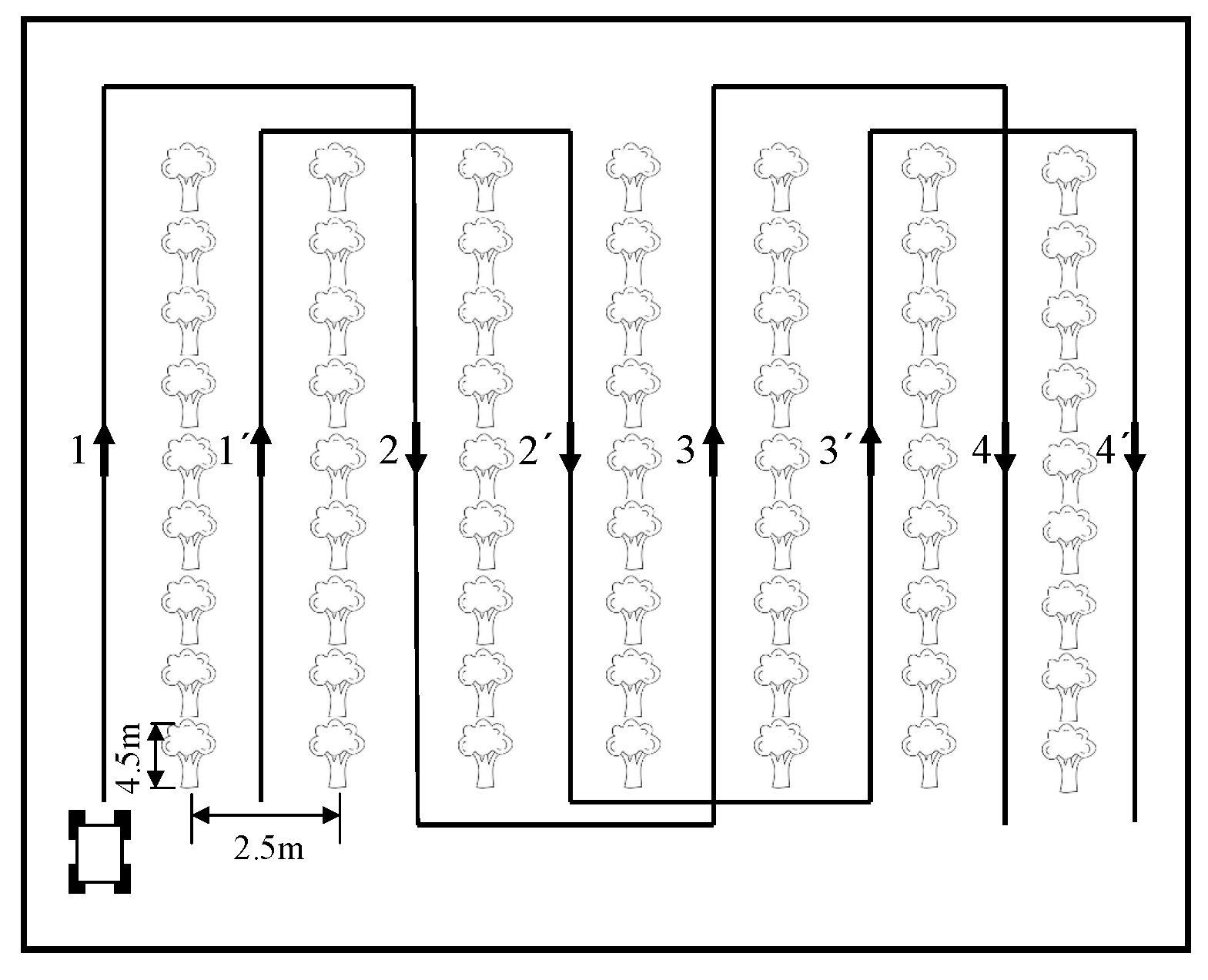
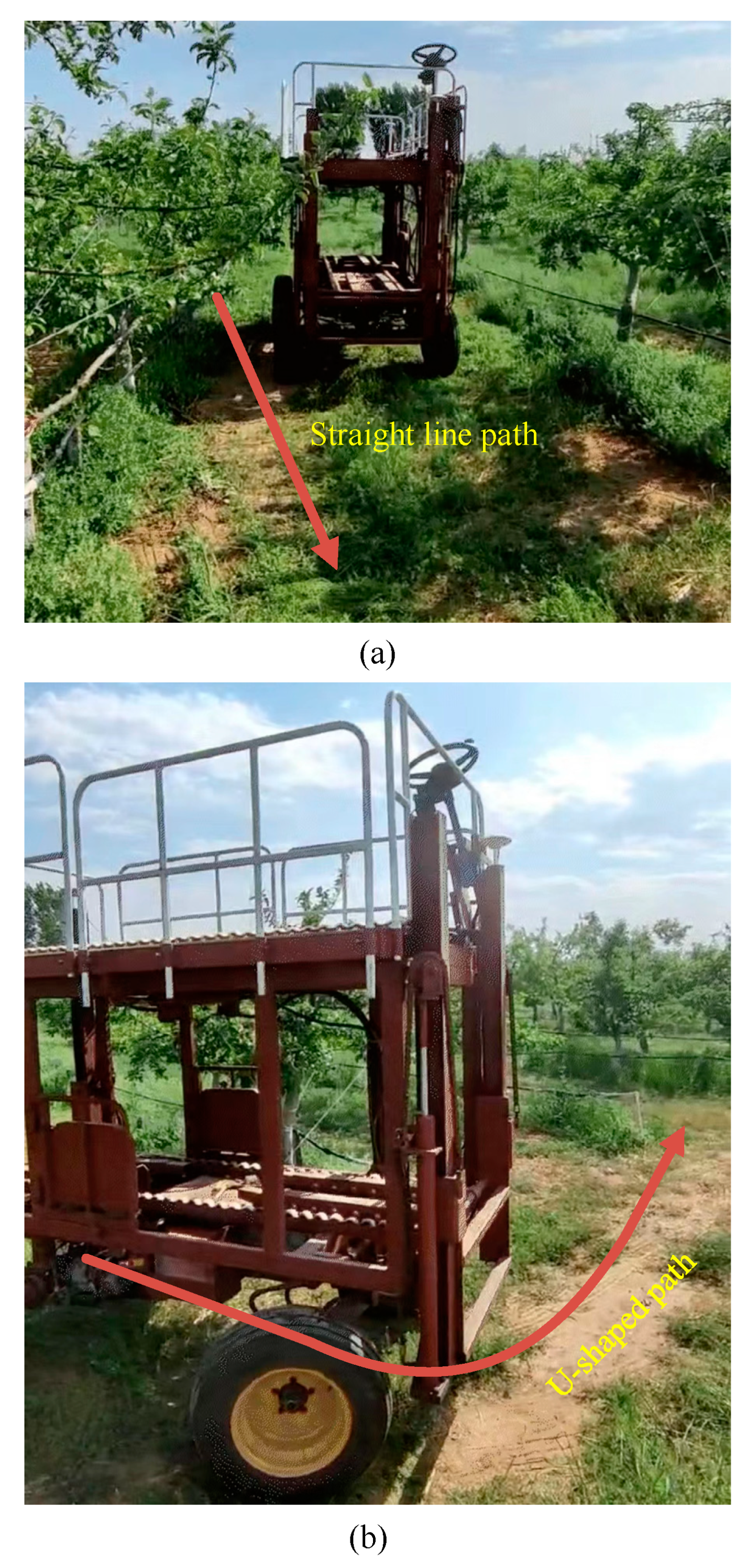
3.2.4. Automatic Navigation Tests of the Picking Platform
4. Summary
- (1)
- A high-level extendable working platform and fruit-box-lifting device operated via voice control were adopted with the purpose of improving the applicability and work efficiency of the picking platform. The accuracy of the speech recognition and the response time of the voice control system were tested and verified via system testing.
- (2)
- The assembly of the picking platform prototype was completed and the average minimum turning radius of the picking platform was 4.5 m, meeting the requirements of the minimum turning radius in the orchard. Furthermore, the operating tests of the voice control system were conducted on the prototype. The results showed that both the maximum elevated height deviation of the front and rear fruit box and the maximum distance deviation of the high-level extendable working platform pedals were within 10 mm compared with the design value, meeting the requirements for fruit box loading and unloading and fruit picking.
- (3)
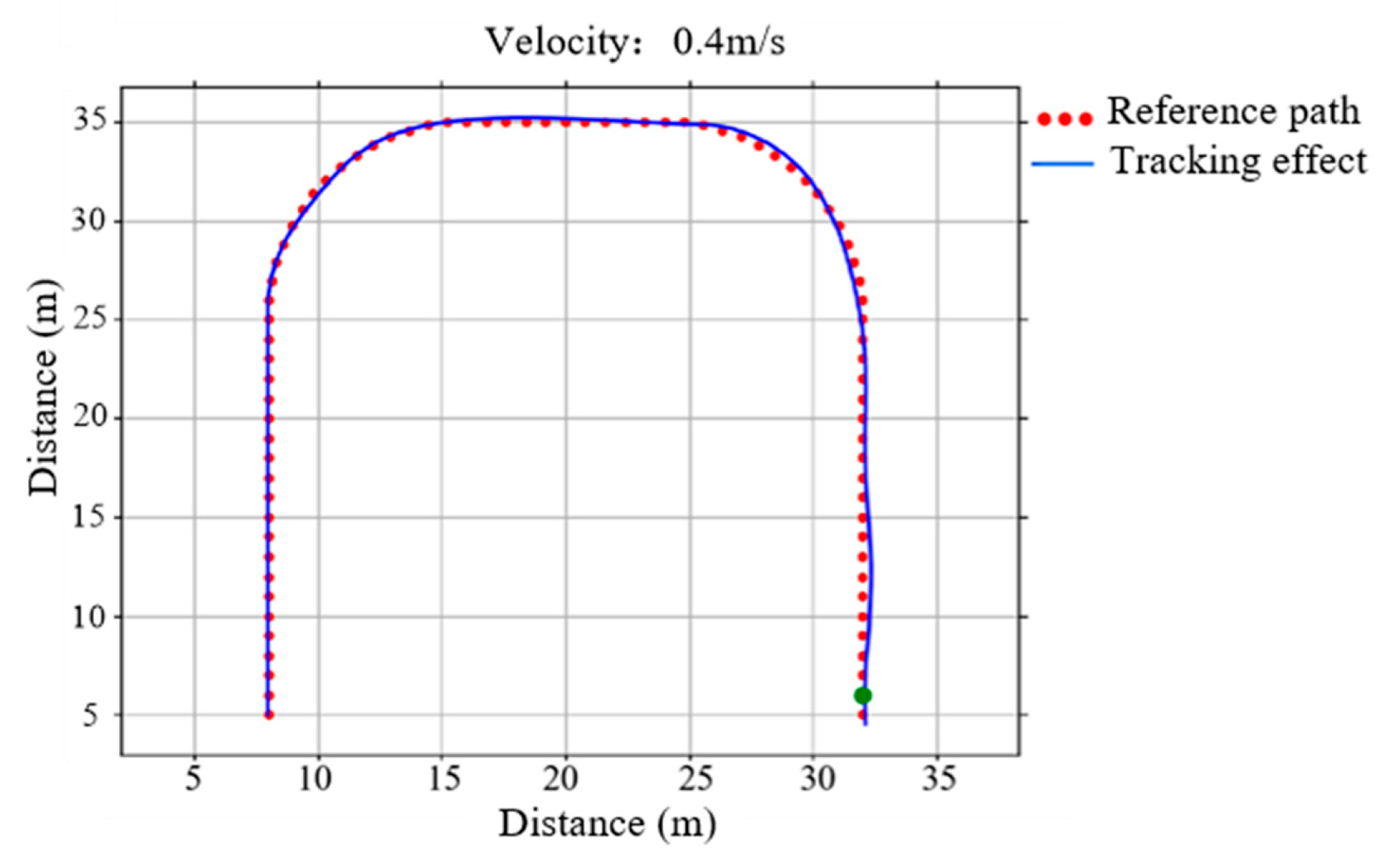
- Automatic navigation tests of the picking platform were conducted in the orchards. The results indicated that at 0.4 m/s, the maximum lateral deviation in straight-line path tracking was 101.5 mm and the maximum lateral deviation in U-shaped path tracking was 148.6 mm. The results demonstrated that the picking platform’s path-tracking accuracy meets the requirements for orchard picking operations.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- National Bureau of Statistics. 2020 China Statistical Yearbook. Stat. Theory Pract. 2021, 1, 2. [Google Scholar]
- Liu, M.C. Research on the development status of forest and fruit industry at home and abroad. Flowers Plants 2017, 14, 211–212. [Google Scholar]
- Lan, F.; Su, Z.H.; Li, Z.M.; Xie, S. Current situation and development trend of orchard picking machinery. Agric. Mech. Res. 2010, 11, 249–252. [Google Scholar]
- Song, Z.; Wang, H.; Li, C.H.; Yu, N.W.; Zhang, X.M.; Li, H.J. Chinese apple industry existing main problems, development trend and solutions. Jiangsu Agric. Sci. 2016, 09, 4–8. [Google Scholar]
- Fu, W.; Liu, Y.D.; Kan, Z.; Pan, J.B.; Cui, J.; Zhang, H.M. Current situation and trend of orchard pruning machinery. Agric. Mech. Res. 2017, 10, 7–11. [Google Scholar]
- Wei, S.; Li, S.C.; Zhang, M.; Ji, Y.H.; Xiang, M.; Li, M.Z. Path search and steering control of agricultural machinery automatic navigation based on GNSS. Trans. Chin. Soc. Agric. Eng. 2017, S1, 70–77. [Google Scholar]
- Liu, J.; Yuan, J.; Cai, J.Y.; Tao, C.L.; Wang, L.M.; Cheng, W. Automatic driving system of agricultural machinery based on GPS/INS and steering by wire. Trans. Chin. Soc. Agric. Eng. 2016, 1, 46–53. [Google Scholar]
- Li, T.C.; Hu, J.T.; Gao, L.; Liu, X.G.; Bai, X.P. Path tracking method of agricultural machinery based on fuzzy adaptive pure tracking model. Trans. Chin. Soc. Agric. Mach. 2013, 1, 205–210. [Google Scholar]
- Han, K.L.; Zhu, Z.X.; Mao, E.R.; Song, Z.H.; Xie, B.; Li, M.S. Joint control method for speed and heading of navigation tractors based on optimal control. Trans. Chin. Soc. Agric. Mach. 2013, 2, 165–170. [Google Scholar]
- Ding, Y.C.; Xia, Z.Z.; Peng, J.Y.; Hu, Z.Q. Design and experiment of Single neuron PID Navigation Controller for Combine Harvester. Trans. Chin. Soc. Agric. Eng. 2020, 7, 34–42. [Google Scholar]
- Zhang, C.Y.; Dong, W.J.; Xiong, Z.Q.; Hu, Z.Q.; Wang, D.H.; Ding, Y.C. Design and experiment of fuzzy adaptive Pure Tracking Controller for crawler rape seeder. Trans. Chin. Soc. Agric. Mach. 2021, 12, 105–114. [Google Scholar]
- Wang, M.; Zhao, B.; Wang, C.W.; Li, H.W.; Liu, Y.C.; Fang, Z.X. Control method of turning radius of crawler tractor based on Gaussian mixture model. Trans. Chin. Soc. Agric. Mach. 2020, S1, 557–563. [Google Scholar]
- Gao, M.J.; Yang, Z.X.; Tian, J.W. Implementation of real-time voice control for mobile robots. Electron. Meas. Tech. 2011, 7, 53+50–79. [Google Scholar]
- Guo, C.Y.; Fan, Y.H.; Zhang, S.; Chen, J. Research progress of orchard vehicle automatic navigation technology. J. Northeast Agric. Univ. 2019, 8, 87–96. [Google Scholar]
- Ji, C.Y.; Zhou, J. Development analysis of agricultural machinery navigation technology. Trans. Chin. Soc. Agric. Mach. 2014, 9, 44–54. [Google Scholar]
- Zhang, M.; Ji, Y.H.; Li, S.C.; Cao, R.Y.; Xu, H.Z.; Zhang, Z.Q. Research progress of agricultural machinery navigation technology. Trans. Chin. Soc. Agric. Mach. 2020, 4, 1–18. [Google Scholar]
- Shamshiri, R.R.; Weltzien, C.; Hameed, I.A.; Yule, I.J.; Chowdhary, G. Research and development in agricultural robotics: A perspective of digital farming. Int. J. Agric. Biol. Eng. 2018, 11, 14. [Google Scholar] [CrossRef]
- Li, M.; Imou, K.; Wakabayashi, K.; Yokoyama, S. Review of research on agricultural vehicle autonomous guidance. Int. J. Agric. Biol. Eng. 2009, 2, 1. [Google Scholar]
- Feng, Q.; Zhao, C.; Kai, J.; Fan, P.; Wang, X. Design and test of tray-seedling sorting transplanter. Int. J. Agric. Biol. Eng. 2015, 8, 14–20. [Google Scholar]
- Lv, Q.; Cai, J.R.; Liu, B.; Deng, L.; Zhang, Y.J. Identification of fruit and branch in natural scenes for citrus harvesting robot using machine vision and support vector machine. Int. J. Agric. Biol. Eng. 2014, 7, 115–121. [Google Scholar]
- Guo, R.; Li, Z.; Zhao, P.; Yu, T.; Yang, Y.; Bai, X. Design and operating parameter optimization of a harvester for efficient lily bulb cultivation. Appl. Eng. Agric. 2021, 4, 37. [Google Scholar] [CrossRef]
- Almady, S.; Khelifi, M. Design and preliminary testing of a pneumatic prototype machine to control the colorado potato beetle. Appl. Eng. Agric. 2021, 4, 37. [Google Scholar] [CrossRef]
- Chang, Y.H.; Lv, X.L.; Lin, J.; Xue, X.Y.; Wang, Z.H. Current situation and development idea of the orchard mechanization. Chin. J. Agric. Mech. 2013, 6, 21–26. [Google Scholar]
- Albrigo, L.G.; Ehsani, R.; Albrigo, L.G.; Ehsani, R. Proceedings of the International Symposium on Application of Precision Agriculture for Fruits and Vegetables, Orlando, Florida, USA, 6–9 January 2008; International Society for Horticultural Science (ISHS): Leuven, Belgium, 2009. [Google Scholar]
- Reid, J.F.; Qin, Z.; Noguchi, N.; Dickson, M. Agricultural automatic guidance research in north America. Comput. Electron. Agric. 2000, 25, 155–167. [Google Scholar] [CrossRef]
- Zhang, Q.; Qiu, H. A dynamic path search algorithm for tractor automatic navigation. Trans. ASAE 2004, 47, 639–646. [Google Scholar] [CrossRef]
- Cho, S.I.; Ki, N.H. Autonomous speed sprayer guidance using machine vision and fuzzy logic. Trans. ASAE 1999, 42, 1137–1143. [Google Scholar] [CrossRef]
- Bell, T. Automatic tractor guidance using carrier-phase differential GPS. Comput. Electron. Agric. 2000, 25, 53–66. [Google Scholar] [CrossRef]
- Nagasaka, Y.; Saito, H.; Tamaki, K.; Seki, M.; Kobayashi, K.; Taniwaki, K. An autonomous rice transplanter guided by global positioning system and inertial measurement unit. J. Field Robot. 2010, 26, 537–548. [Google Scholar] [CrossRef]
- Gomez-Gil, J.; Alonso-Garcia, S.; Gómez-Gil, F.J.; Stombaugh, T. A simple method to improve autonomous GPS positioning for tractors. Sensors 2011, 11, 5630–5644. [Google Scholar] [CrossRef] [PubMed]
- Torii, T.; Teshima, T.; Okamoto, T.; Imou, K.; Kaizu, Y.; Taniwaki, K. Vision based navigation of a boom sprayer. J. Jpn. Soc. Agric. Mach. 2003, 65, 70–75. [Google Scholar]
- Song, J.; Zhang, T.Z.; Xu, L.M.; Tang, X.Y. Research progress and prospect of fruit and vegetable picking robot. Trans. Chin. Soc. Agric. Mach. 2006, 5, 158–162. [Google Scholar]
- Yang, C.L.; Fan, G.J.; Wang, C.W.; Song, Y.P.; Hou, J.L. Design and experiment of multifunctional fully hydraulic orchard operating platform. Agric. Mech. Res. 2019, 1, 110–114+126. [Google Scholar]
- Hou, Z.W. Wheeled Orchard Work Platform Performance Analysis and Simulation. Master’s Thesis, Northwest Agriculture and Forestry University of Science and Technology, Xianyang, China, 2016. [Google Scholar]
- Thrun, S.; Montemerlo, M.; Palatucci, M. Stanley: The robot that won the DARPA grand challenge. J. Field Robot. 2009, 23, 661–692. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Hydraulic cylinder diameter (mm) | 50 |
| Piston rod diameter (mm) | 25 |
| Maximum working pressure (MPa) | 20 |
| Piston rod speed (m/s) | 0~0.6 |
| Piston rod stroke (mm) | 380 |
| Parameters | Rated Voltage (V) | Rated Speed (r/min) | Output Speed (r/min) | Rated Power (kW) |
|---|---|---|---|---|
| valve | 60 | 3500 | 700 | 1.5 |
| Parameters | Rated Voltage (V) | Electric Capacity (Ah) | Operation Temperature (℃) | Overall Dimension |
|---|---|---|---|---|
| valve | 12 | 400 | −20~60 | 400 × 250 × 225 |
| Voice Recognition Keywords | Voice Recognition Output | Hydraulic Cylinder Actions |
|---|---|---|
| “cai3 zhai1 ping2 tai2” | “wo3 zai4” | Waiting for commands |
| “qian2 sheng1” | GPIO_B3 high level | The front lifting hydraulic cylinder extends |
| “ting2 zhi3 qian2 sheng1” | GPIO_B3 low level | The front lifting hydraulic cylinder stops extending |
| “qian2 jiang4” | GPIO_B2 high level | The front lifting hydraulic cylinder retracts |
| “ting2 zhi3 qian2 jiang4” | GPIO_ B2 low level | The front lifting hydraulic cylinder stops retracting |
| “hou4 sheng1” | GPIO_B6 high level | The rear lifting hydraulic cylinder extends |
| “ting2 zhi3 hou4 sheng1” | GPIO_B6 low level | The rear lifting hydraulic cylinder stops extending |
| “hou4 jiang4” | GPIO_B7 high level | The rear lifting hydraulic cylinder retracts |
| “ting2 zhi3 hou4 jiang4” | GPIO_B7 low level | The rear lifting hydraulic cylinder stops retracting |
| “zuo3 shen1” | GPIO_A25 high level | The left telescopic hydraulic cylinder extends |
| “ting2 zhi3 zuo3 shen1” | GPIO_A25 low level | The left telescopic hydraulic cylinder stops extending |
| “zuo3 suo1” | GPIO_A26 high level | The left telescopic hydraulic cylinder retracts |
| “ting2 zhi3 zuo3 suo1” | GPIO_A26 low level | The left telescopic hydraulic cylinder stops retracting |
| “you4 shen1” | GPIO_A27 high level | The right telescopic hydraulic cylinder extends |
| “ting2 zhi3 you4 shen1” | GPIO_A27 low level | The right telescopic hydraulic cylinder stops extending |
| “you4 suo1” | GPIO_A28 high level | The right telescopic hydraulic cylinder retracts |
| “ting2 zhi3 you4 suo1” | GPIO_A28 low level | The right telescopic hydraulic cylinder stops retracting |
| Commands | Recognition Rate in the Quiet Environment (%) | Recognition Rate in the Noisy Environment (%) |
|---|---|---|
| “cai3 zhai1 ping2 tai2” | 93.0 | 90.0 |
| “qian2 sheng1” | 95.0 | 92.0 |
| “ting2 zhi3 qian2 sheng1” | 93.0 | 85.0 |
| “zuo3 suo1” | 96.0 | 85.0 |
| “ting2 zhi3 zuo3 suo1” | 90.0 | 83.0 |
| Average recognition rate | 93.4 | 87.0 |
| Commands | Recognition Time in the Quiet Environment (s) | Recognition Time in the Noisy Environment (s) |
|---|---|---|
| “cai3 zhai1 ping2 tai2” | 1.4 | 1.6 |
| “qian2 sheng1” | 1.0 | 1.3 |
| “ting2 zhi3 qian2 sheng1” | 1.6 | 1.8 |
| “zuo3 suo1” | 1.2 | 1.5 |
| “ting2 zhi3 zuo3 suo1” | 1.6 | 1.8 |
| Average recognition time | 1.4 | 1.6 |
| Voice Recognition Keywords | Voice Recognition Output | Walking Actions |
|---|---|---|
| “cai3 zhai1 ping2 tai2” | “wo3 zai4” | Waiting for commands |
| “qian2 jin4” | 0 | Walk forward |
| “ting2 zhi3 qian2 jin4” | 1 | Stop walking forward |
| “hou4 tui4” | 2 | Walk backward |
| “ting2 zhi3 hou4 tui4” | 3 | Stop walking backward |
| Commands | Recognition Rate in the Quiet Environment (%) | Recognition Rate in the Noisy Environment (%) |
|---|---|---|
| “cai3 zhai1 ping2 tai2” | 96.0 | 92.0 |
| “qian2 jin4” | 95.0 | 89.0 |
| “ting2 zhi3 qian2 jin4” | 90.0 | 81.0 |
| “hou4 tui4” | 92.0 | 87.0 |
| “ting2 zhi3 hou4 tui4” | 97.0 | 90.0 |
| Average recognition rate | 94.0 | 87.8 |
| Commands | Recognition Time in the Quiet Environment (s) | Recognition Time in the Noisy Environment (s) |
|---|---|---|
| “cai3 zhai1 ping2 tai2” | 1.3 | 1.5 |
| “qian2 jin4” | 1.0 | 1.2 |
| “ting2 zhi3 qian2 jin4” | 1.4 | 1.7 |
| “hou4 tui4” | 1.1 | 1.3 |
| “ting2 zhi3 hou4 tui4” | 1.5 | 1.7 |
| Average recognition time | 1.2 | 1.5 |
| Parameter | Left Wheel Steering Angle (°) | Right Wheel Steering Angle (°) | Steering Wheel Angle (°) |
|---|---|---|---|
| Initial angle | 0 | 0 | 0 |
| Right steering maximum angle | 26.5 | 30.3 | 550 |
| Left steering maximum angle | −28.3 | −24.5 | −510 |
| Number of Tests | Turning Radius of Outer Wheel (m) | Average Value (m) |
|---|---|---|
| 1 | 4.6 | 4.5 |
| 2 | 4.3 | |
| 3 | 4.7 |
| Number of Tests | Theoretical Lifting Height (mm) | Lifting Height of Front Lifting Device (mm) | Absolute Error of Lifting Height (mm) | Relative Error of Lifting Height (%) | Lifting Height of Rear Lifting Device (mm) | Absolute Error of Lifting Height (mm) | Relative Error of Lifting Height (%) |
|---|---|---|---|---|---|---|---|
| 1 | 1940 | 1935 | 5 | 0.26 | 1934 | 6 | 0.31 |
| 2 | 1940 | 1937 | 3 | 0.15 | 1936 | 4 | 0.21 |
| 3 | 1940 | 1934 | 6 | 0.31 | 1935 | 5 | 0.26 |
| 4 | 1940 | 1936 | 4 | 0.21 | 1937 | 3 | 0.15 |
| 5 | 1940 | 1934 | 6 | 0.31 | 1938 | 2 | 0.10 |
| Number of Tests | Theoretical Extension Length (mm) | Left Extension Pedal Extension Length (mm) | Extension Length Absolute Error (mm) | Extension Length Relative Error (%) | Right Extension Pedal Extension Length (mm) | Extension Length Absolute Error (mm) | Extension Length Relative Error (%) |
|---|---|---|---|---|---|---|---|
| 1 | 380 | 376 | 4 | 1.05 | 378 | 2 | 0.52 |
| 2 | 380 | 375 | 5 | 1.32 | 376 | 4 | 1.05 |
| 3 | 380 | 373 | 7 | 1.84 | 375 | 5 | 1.32 |
| 4 | 380 | 374 | 6 | 1.57 | 377 | 3 | 0.79 |
| 5 | 380 | 375 | 5 | 1.32 | 376 | 4 | 1.05 |
| Number of Tests | Maximum Lateral Deviation (mm) | Average Lateral Deviation (mm) | Absolute Average Deviation (mm) | Standard Deviation (mm) |
|---|---|---|---|---|
| 1 | 100.3 | 3.1 | 39.0 | 20.5 |
| 2 | 93.2 | 1.4 | 39.5 | 17.1 |
| 3 | 101.5 | −1.4 | 44.1 | 19.5 |
| Number of Tests | Maximum Lateral Deviation (mm) | Average Lateral Deviation (mm) | Absolute Average Deviation (mm) | Standard Deviation (mm) |
|---|---|---|---|---|
| 1 | 129.2 | −6.9 | 51.9 | 23.4 |
| 2 | 140.4 | 1.5 | 57.2 | 28.0 |
| 3 | 148.6 | 9.7 | 57.0 | 26.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, S.; Pan, K.; Wang, S.; Zhu, Y.; Zhang, Q.; Su, X.; Yu, H. Design and Test of an Automatic Navigation Fruit-Picking Platform. Agriculture 2023, 13, 882. https://doi.org/10.3390/agriculture13040882
Huang S, Pan K, Wang S, Zhu Y, Zhang Q, Su X, Yu H. Design and Test of an Automatic Navigation Fruit-Picking Platform. Agriculture. 2023; 13(4):882. https://doi.org/10.3390/agriculture13040882
Chicago/Turabian StyleHuang, Shaojiong, Kaoxin Pan, Sibo Wang, Ying Zhu, Qing Zhang, Xin Su, and Hongjun Yu. 2023. "Design and Test of an Automatic Navigation Fruit-Picking Platform" Agriculture 13, no. 4: 882. https://doi.org/10.3390/agriculture13040882