Design and Experimental Verification of Targeted and Variable Sprayer for the Potato


Abstract
:1. Introduction
2. Machine Structure and Working Principle
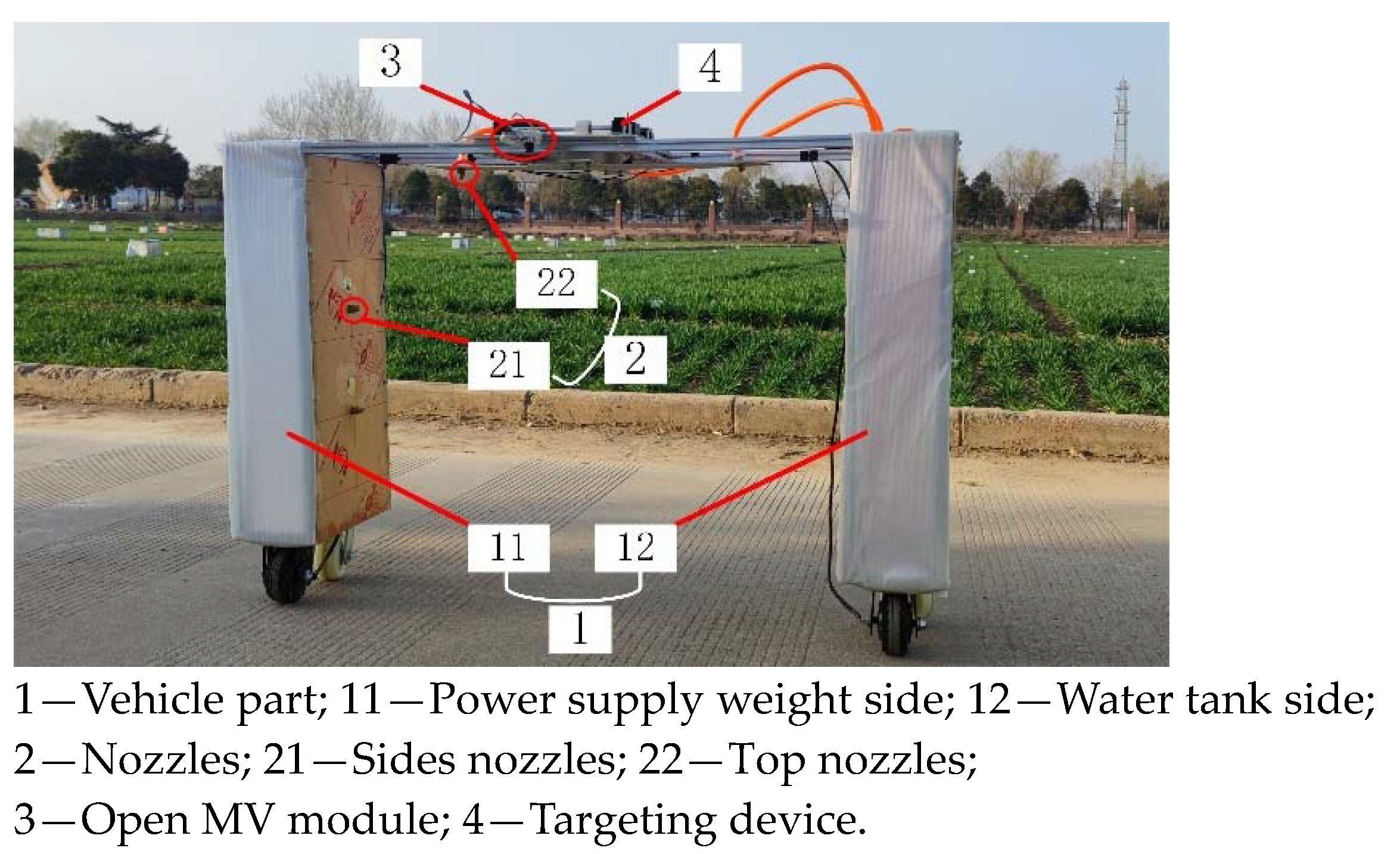
2.1. Machine Structure
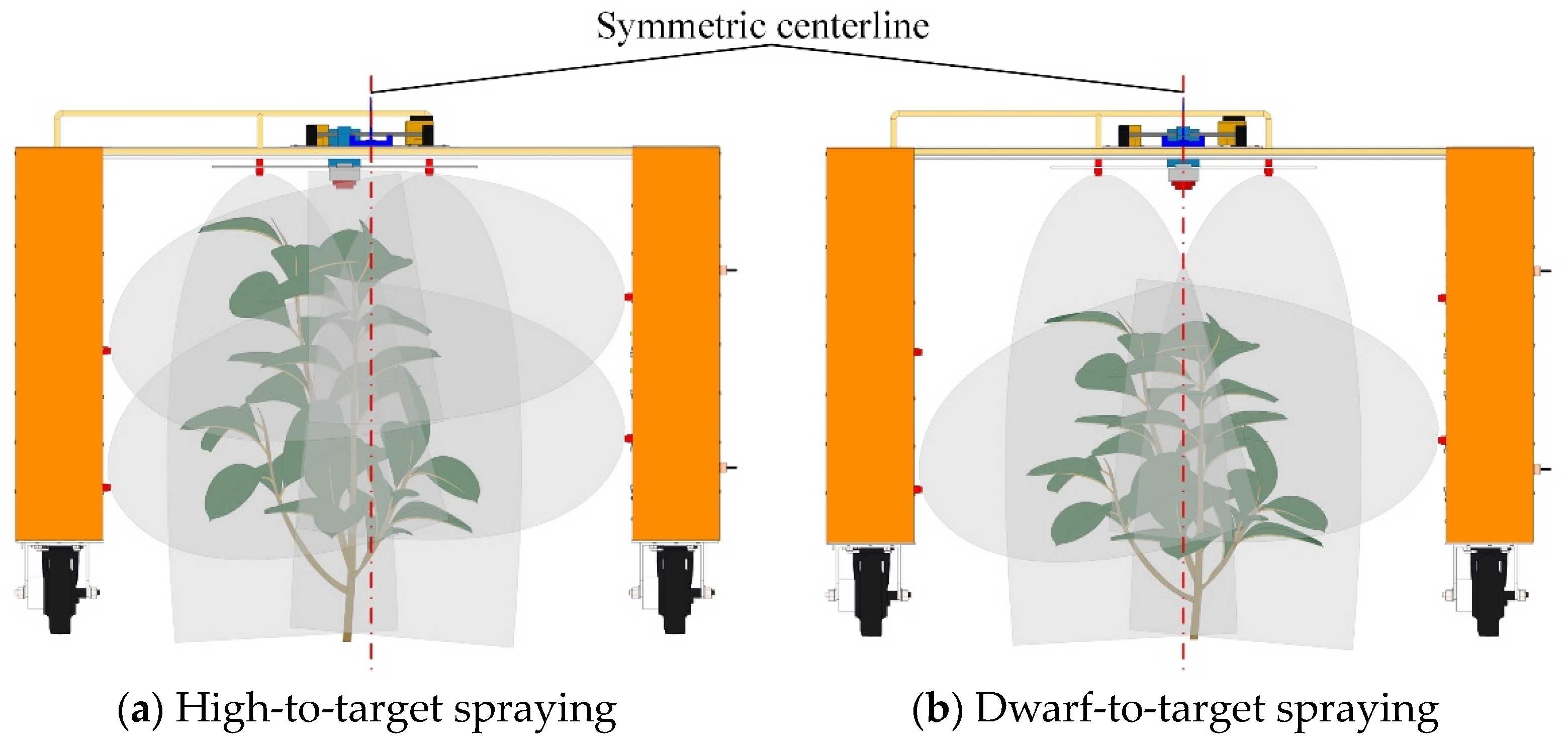
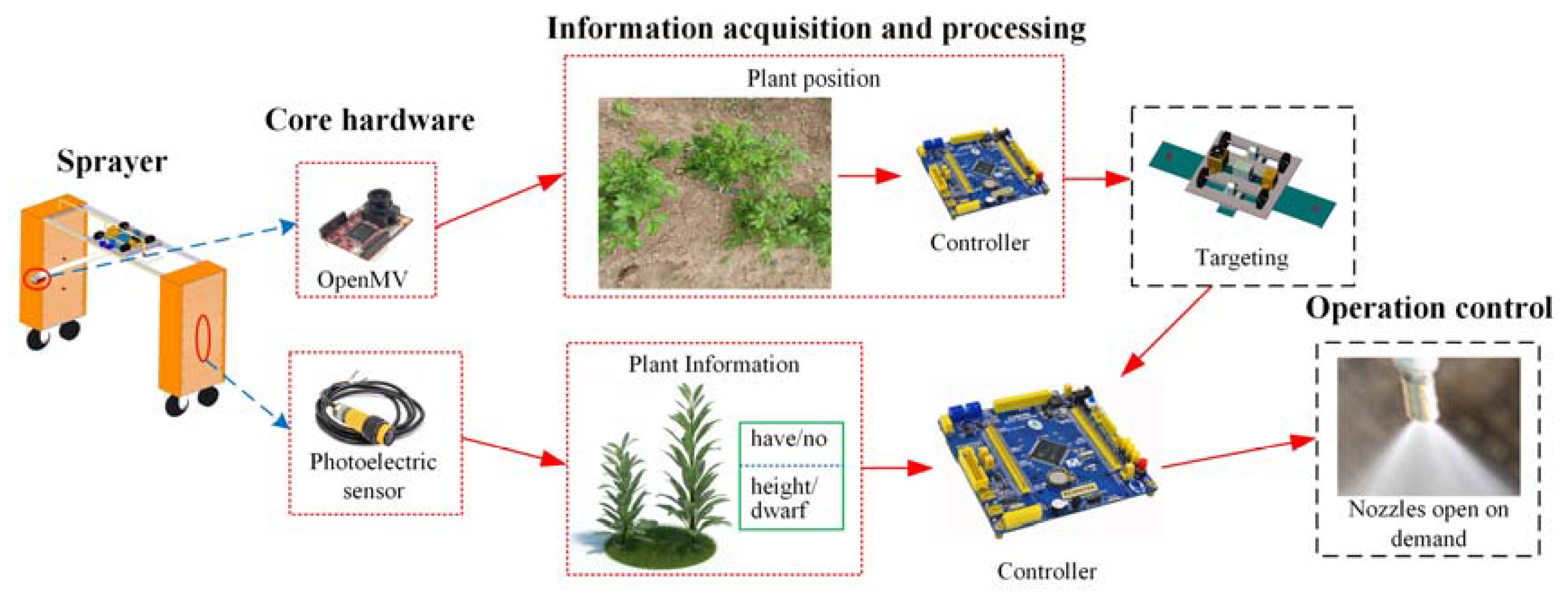
2.2. Working Principle
3. The Essential Components of Design
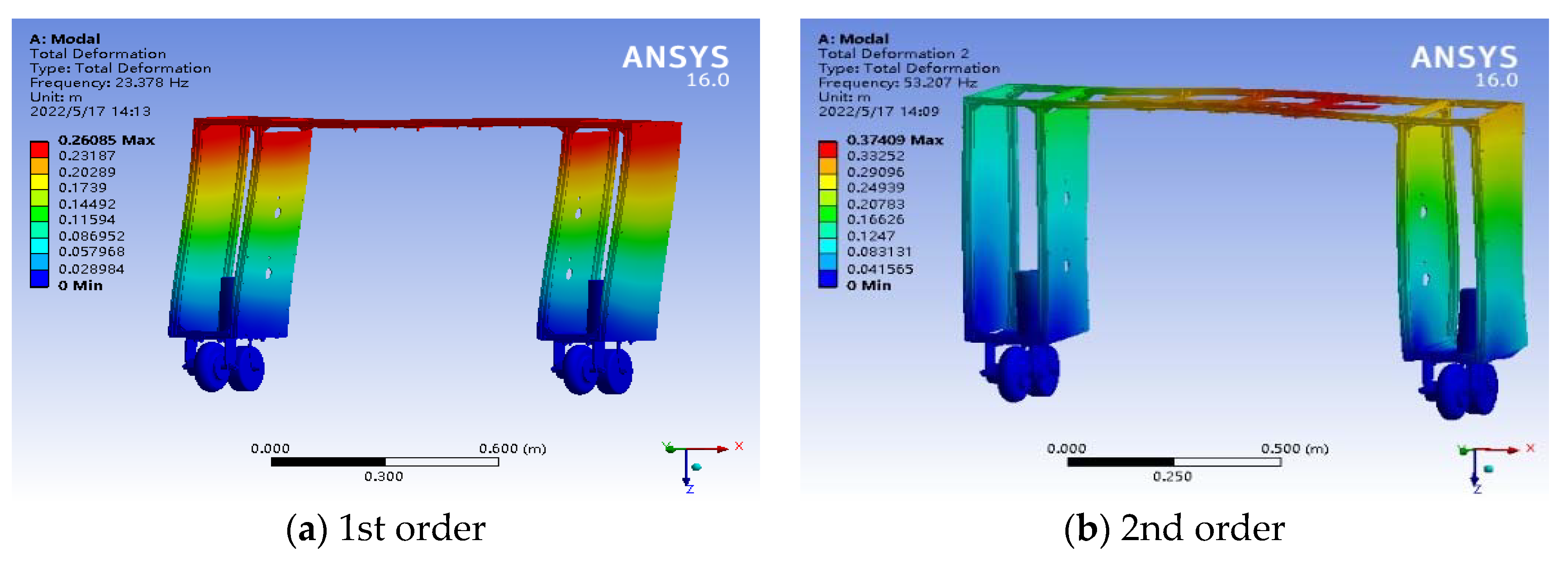
3.1. Vehicle Part Design and Verification
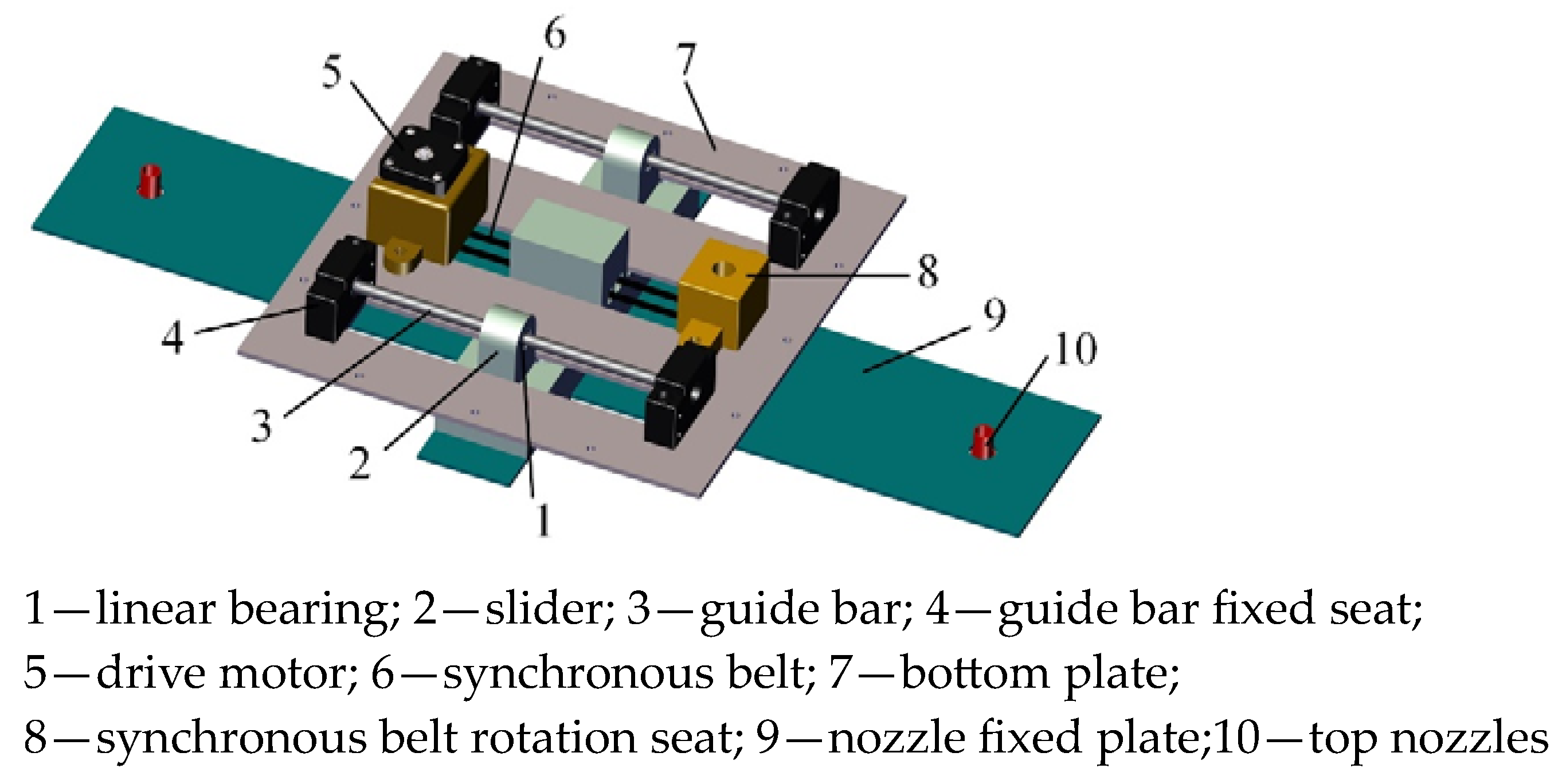
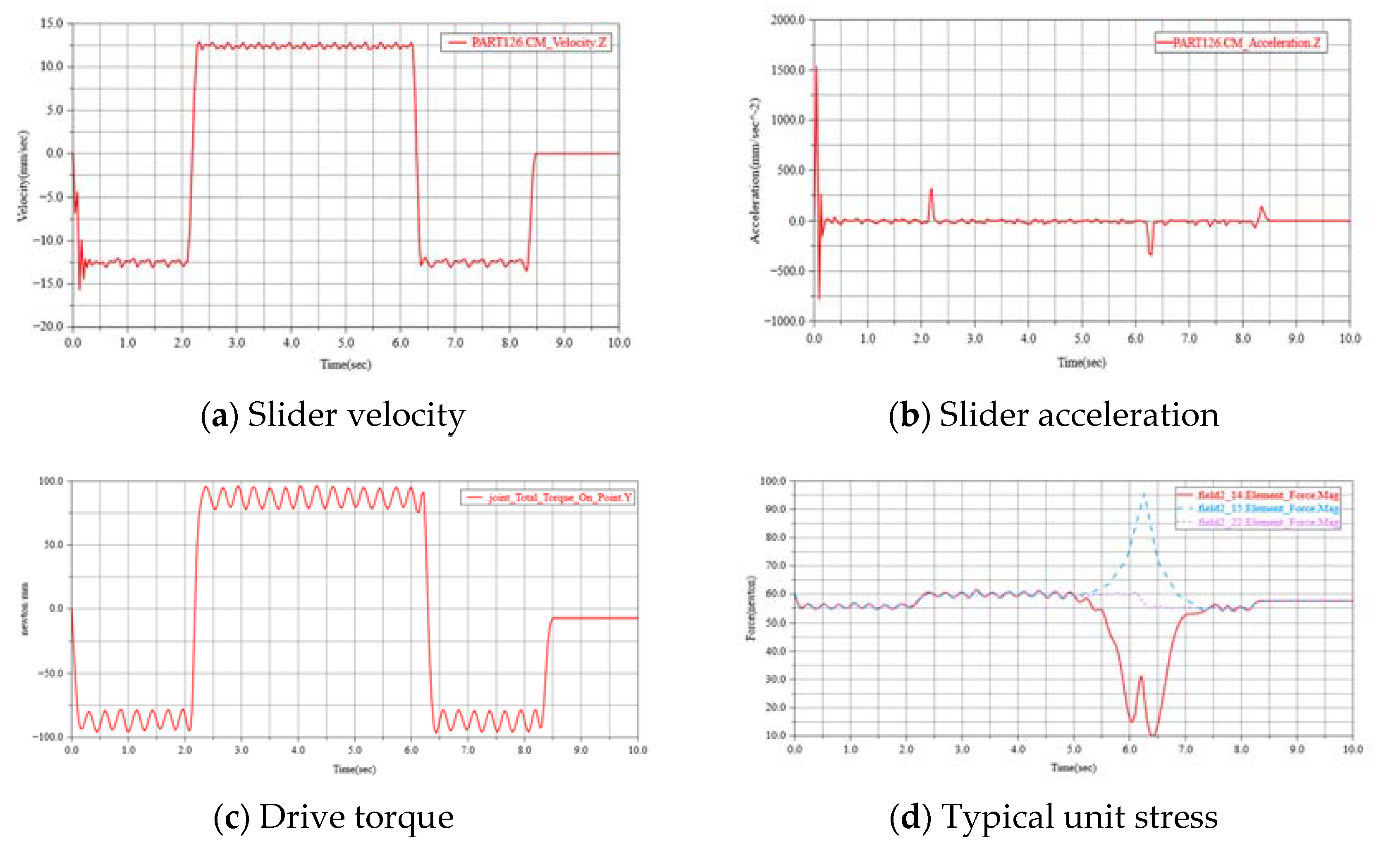
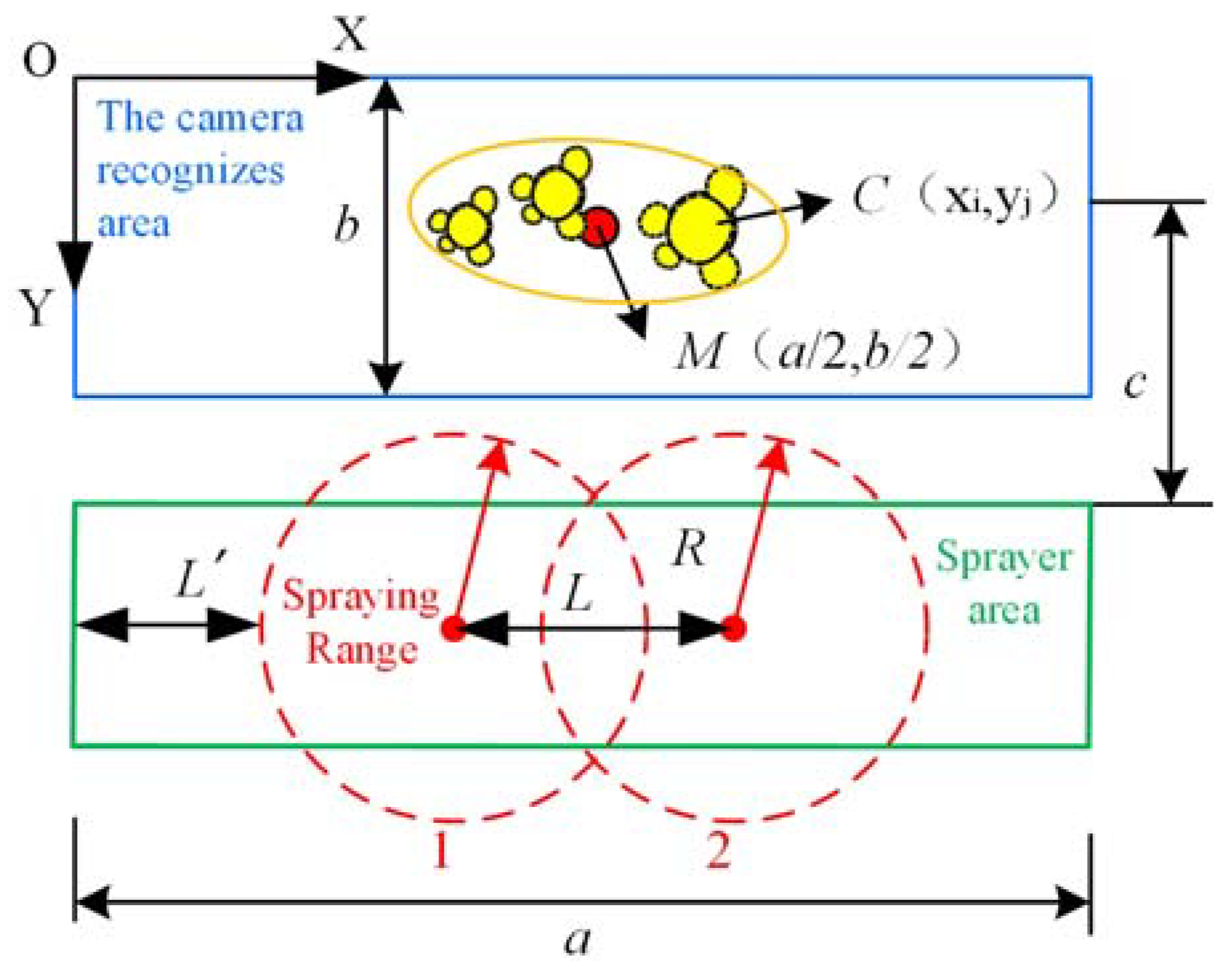
3.2. Targeting Device Design and Verification
4. Sprayer Control System Construction
4.1. Autonomous Marching System
4.2. Targeted and Variable Spray System
5. Sprayer Performance Testing Experiments
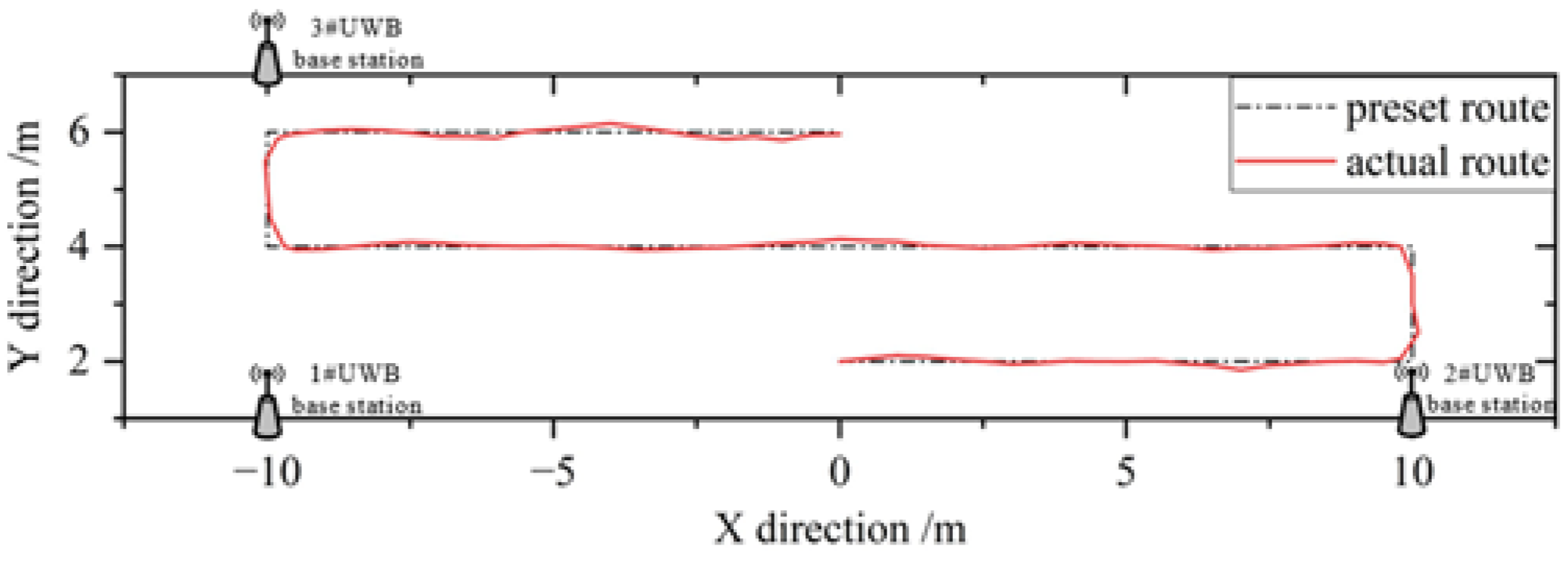
5.1. Autonomous Marching Experiment
- (1)
- Uneven ground surface causes a specific deviation in the driving angle of the sprayer.
- (2)
- The shaking of the medicine in the tank during the sprayer’s movement, combined with the vibration produced by the sprayer, affects the label fixed on the top of the sprayer, thus affecting the test results.
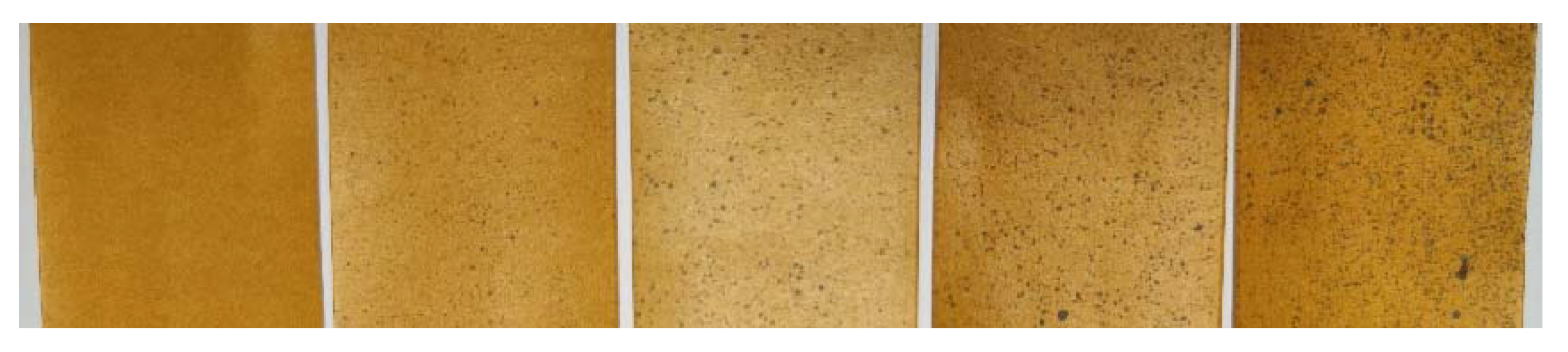
5.2. Targeted and Variable Spray Experiment
- (1)
- Increased the spraying precision by 12.2% while maintaining high precision, with the adhesion rate μ of the pesticide exceeding 66.4%, resulting in excellent disease control;
- (2)
- Reduced the coefficient of variation of the pesticide adhesion rate by 31.6%, resulting in a more uniform pesticide spray distribution;
- (3)
- Under similar working conditions, the targeted and variable spray effectively improved the targeting rate of the pesticide and saved 37.9% of the pesticide.
6. Conclusions
- (1)
- The operational reliability of the main working parts of the sprayer was analysed. The modal analysis of the vehicle part was carried out using ANSYS software. The resonance frequency was greater than 23.387 Hz, and the sprayer would not resonate. The motion of the targeting device was simulated using ADAMS software, and the motion reliability of the equipment can meet the requirements.
- (2)
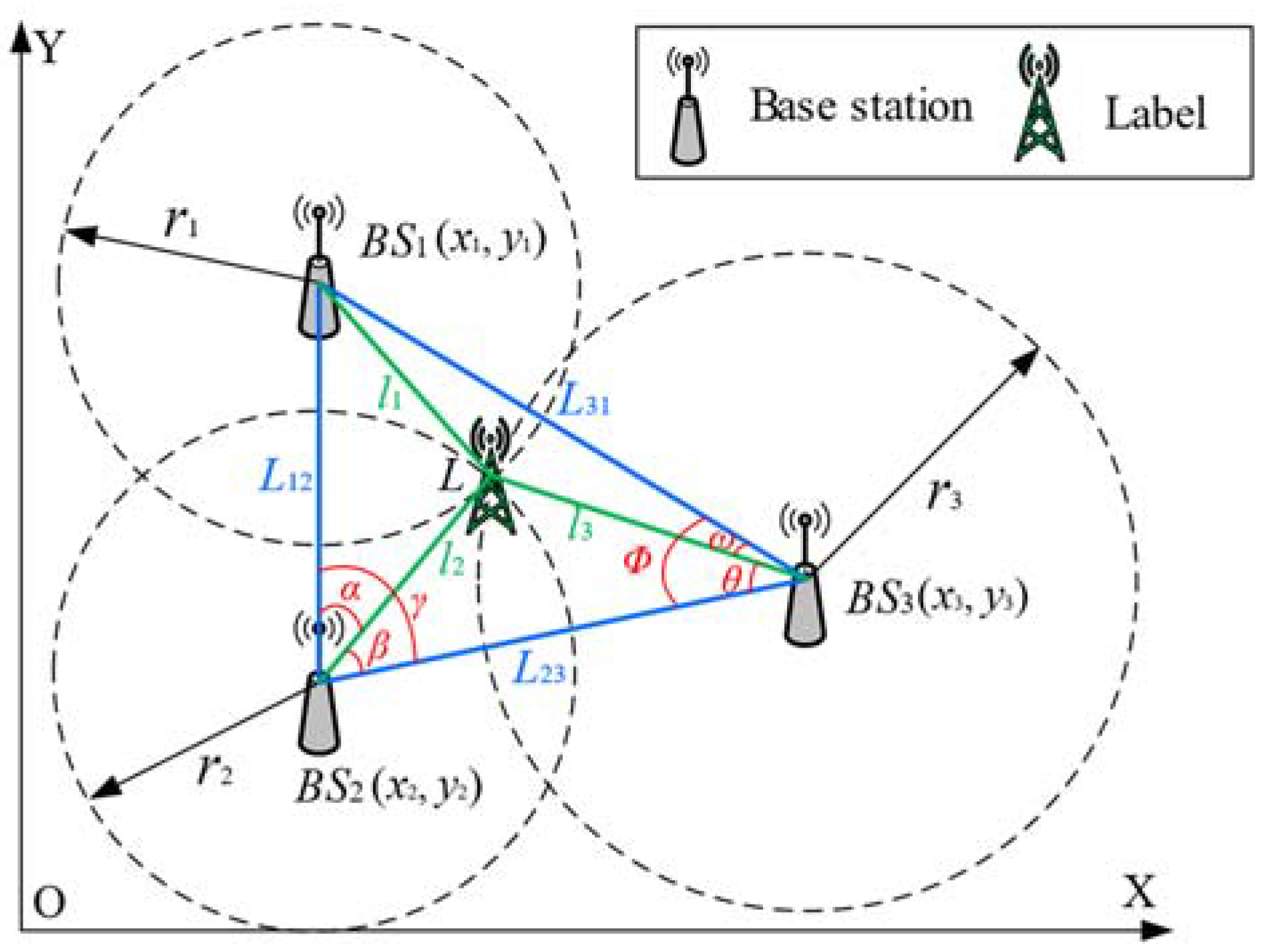
- The targeted and variable spray system was built with the design of an autonomous marching system with a positioning accuracy of up to 18 cm using the TOA principle in UWB technology. Plant position recognition was achieved using Open MV technology.
- (3)
- Performance validation tests were carried out on the sprayer based on field testing methods for plant protection machinery. The results proved that the sprayer could follow a preset route, identify potato plants, and carry out targeted and variable spraying based on relevant information, with an adherence rate of over 66% and a pesticide-saving rate of 37.9% compared to continuous spray.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tudi, M.; Li, H.; Li, H.; Wang, L.; Lyu, J.; Yang, L.; Tong, S.; Yu, Q.J.; Ruan, H.D.; Atabila, A.; et al. Exposure Routes and Health Risks Associated with Pesticide Application. Toxics 2022, 10, 335. [Google Scholar] [CrossRef]
- Liang, Z.; Abdelshafy, A.M.; Luo, Z.; Belwal, T.; Lin, X.; Xu, Y.; Wang, L.; Yang, M.; Qi, M.; Dong, Y.; et al. Occurrence, detection, and dissipation of pesticide residue in plant-derived foodstuff: A state-of-the-art review. Food Chem. 2022, 384, 132494. [Google Scholar] [CrossRef]
- Wang, P.; Yu, W.; Ou, M.; Gong, C.; Jia, W. Monitoring of the Pesticide Droplet Deposition with a Novel Capacitance Sensor. Sensors 2019, 19, 537. [Google Scholar] [CrossRef] [Green Version]
- An, Q.; Li, D.; Wu, Y.; Pan, C. Deposition and distribution of myclobutanil and tebuconazole in a semidwarf apple orchard by hand-held gun and air-assisted sprayer application. Pest Manag. Sci. 2020, 76, 4123–4130. [Google Scholar] [CrossRef]
- Kim, J.; Kim, S.; Ju, C.; Son, H.I. Unmanned Aerial Vehicles in Agriculture: A Review of Perspective of Platform, Control, and Applications. IEEE Access 2019, 7, 105100–105115. [Google Scholar] [CrossRef]
- Radoglou-Grammatikis, P.; Sarigiannidis, P.; Lagkas, T.; Moscholios, I. A compilation of UAV applications for precision agriculture. Comput. Netw. 2020, 172, 107148. [Google Scholar] [CrossRef]
- Mahmud, M.S.; Zahid, A.; He, L.; Martin, P. Opportunities and Possibilities of Developing an Advanced Precision Spraying System for Tree Fruits. Sensors 2021, 21, 3262. [Google Scholar] [CrossRef]
- Berenstein, R.; Edan, Y. Human-robot collaborative site-specific sprayer. J. Field Robot. 2017, 34, 1519–1530. [Google Scholar] [CrossRef]
- Xiang, D.; Tie, Z.; Mingde, Y. Design and experiment of 3WPZ-4 type air-assisted grape sprayer. Trans. Chin. Soc. Agric. Mach 2018, 49, 205–213. [Google Scholar]
- Baltazar, A.R.; dos Santos, F.N.; Moreira, A.P.; Valente, A.; Cunha, J.B. Smarter Robotic Sprayer System for Precision Agriculture. Electronics 2021, 10, 2061. [Google Scholar] [CrossRef]
- Changjie, H.; Kang, Z.; Xueguan, Z.; Shenyu, Z.; Hao, F.; Changyuan, Z. Design and Experiment of Row Identification and Row-oriented Spray Control System for Field Cabbage Crops. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2022, 53, 89–101. [Google Scholar] [CrossRef]
- Pintelon, R.; Guillaume, P.; Schoukens, J. Uncertainty calculation in (operational) modal analysis. Mech. Syst. Signal Process. 2007, 21, 2359–2373. [Google Scholar] [CrossRef]
- Wang, Y.; Pan, J. Applications of Operational Modal Analysis to a Single-Phase Distribution Transformer. IEEE Trans. Power Deliv. 2015, 30, 2061–2063. [Google Scholar] [CrossRef]
- Yao, Y.; Du, Y.; Zhu, Z.; Mao, E.; Song, Z. Vibration characteristics analysis and optimisation of corn combine harvester frame using modal analysis method. Trans. Chin. Soc. Agric. Eng. 2015, 31, 46–53. [Google Scholar]
- Bin Zahid, F.; Ong, Z.C.; Khoo, S.Y. A review of operational modal analysis techniques for in-service modal identification. J. Braz. Soc. Mech. Sci. Eng. 2020, 42, 398. [Google Scholar] [CrossRef]
- Jiang, X.; Jiang, F. Operational modal analysis using symbolic regression for a nonlinear vibration system. J. Low Freq. Noise Vib. Act. Control. 2021, 40, 120–134. [Google Scholar] [CrossRef] [Green Version]
- Ji, J.; Chen, K.; Jin, X.; Wang, Z.; Dai, B.; Fan, J.; Lin, X. High-efficiency modal analysis and deformation prediction of rice transplanter based on effective independent method. Comput. Electron. Agric. 2020, 168, 105126. [Google Scholar] [CrossRef]
- Uk, S. Tracing insecticide spray droplets by sizes on natural surfaces. The state of the art and its value. Pestic. Sci. 1977, 8, 501–509. [Google Scholar]
- Ghafoor, A.; Khan, F.A.; Khorsandi, F.; Khan, M.A.; Nauman, H.M.; Farid, M.U. Development and Evaluation of a Prototype Self-Propelled Crop Sprayer for Agricultural Sustainability in Small Farms. Sustainability 2022, 14, 9204. [Google Scholar] [CrossRef]
- Man, Z.; Yuhan, J.; Shichao, L.; Ruyue, C.; Hongzhen, X.; Zhenqian, Z. Research progress of agricultural machinery navigation technology. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2020, 51, 1–18. [Google Scholar] [CrossRef]
- Navarro, M.; Najar, M. Frequency Domain Joint TOA and DOA Estimation in IR-UWB. IEEE Trans. Wirel. Commun. 2011, 10, 3174–3184. [Google Scholar] [CrossRef]
- Alsindi, N.A.; Alavi, B.; Pahlavan, K. Measurement and Modeling of Ultrawideband TOA-Based Ranging in Indoor Multipath Environments. IEEE Trans. Veh. Technol. 2009, 58, 1046–1058. [Google Scholar] [CrossRef]
- Poulose, A.; Han, D.S. UWB Indoor Localization Using Deep Learning LSTM Networks. Appl. Sci. 2020, 10, 69–77. [Google Scholar] [CrossRef]
- Binbin, X.; Jizhan, L.; Meng, H.; Jian, W.; Zhujie, X. Research progress on Autonomous Navigation Technology of Agricultural Robot. In Proceedings of the 2021 IEEE 11th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Jiaxian, China, 27–31 July 2021; pp. 891–898. [Google Scholar]
- Rehman, T.U.; Mahmud, M.S.; Chang, Y.K.; Jin, J.; Shin, J. Current and future applications of statistical machine learning algorithms for agricultural machine vision systems. Comput. Electron. Agric. 2019, 156, 585–605. [Google Scholar] [CrossRef]
- McGuinness, B.; Duke, M.; Au, C.K.; Lim, S.H. Measuring radiata pine seedling morphological features using a machine vision system. Comput. Electron. Agric. 2021, 189, 106355. [Google Scholar] [CrossRef]
- Sarri, D.; Martelloni, L.; Rimediotti, M.; Lisci, R.; Lombardo, S.; Vieri, M. Testing a multi-rotor unmanned aerial vehicle for spray application in high slope terraced vineyard. J. Agric. Eng. 2019, 50, 38–47. [Google Scholar] [CrossRef] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Overate size (Length × Width × Height)/m × m × m | 1.3 × 0.35 × 0.9 |
| Operation speed/m/s | 0.5 |
| Suitable planting row spacing/m | 0.6–1 |
| Suitable planting height/m | 0.3–0.7 |
| Pesticide tank volume/L | 20 |
| Number of nozzles | 6 |
| Type of nozzle | 2 |
| Rated spray pressure/MPa | 0.3 |
| Order | Natural Frequencies/Hz | Corresponding Mode Shapes |
|---|---|---|
| 1 | 23.378 | Bending in the X direction |
| 2 | 53.207 | Bending in the Y direction |
| 3 | 61.500 | Torsion around the Z axis |
| 4 | 61.811 | Bending in the Z direction |
| Number | Identification of Photoelectric Sensors | Feedback Content | |
|---|---|---|---|
| Top | Below | ||
| I | 1 | 0/1 | Plants available, tall plants |
| II | 0 | 1 | Plants available, dwarf plants |
| III | 0 | 0 | no |
| Parameters | Values |
| Row spacing/m | 1.00 |
| Plant spacing/m | 0.40 |
| Plant height (median)/m | 0.49 |
| Plant height deviation/m | 0.16 |
| Intra-row deviation of plants/m | 0.22 |
| Parameter | Surface | Back | |||||
|---|---|---|---|---|---|---|---|
| Top | Middle | Below | Top | Middle | Below | ||
| Classes | 4 | 11/8 | 9/7 | 7/5 | 9/5 | 7/3 | 5/3 |
| 3 | 13/12 | 12/9 | 10/8 | 14/14 | 9/10 | 7/7 | |
| 2 | 6/7 | 7/10 | 8/9 | 5/9 | 10/10 | 13/13 | |
| 1 | 0/3 | 2/4 | 4/6 | 2/2 | 4/6 | 3/5 | |
| 0 | 0/0 | 0/0 | 1/2 | 0/0 | 0/1 | 2/2 | |
| Total | 30/30 | 30/30 | 30/30 | 30/30 | 30/30 | 30/30 | |
| μ/% | 79.2/70.8 | 73.3/65.8 | 65.0/56.7 | 75.0/68.3 | 65.8/56.7 | 58.3/53.3 | |
| Average μ/% | 72.5/64.4 | 66.4/59.4 | |||||
| Coefficient of variation/% | 22.9/33.5 | ||||||
| Relative consumption/% | 62.1/100 | ||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; He, X.; Xiao, Y.; Jiao, T.; Li, W. Design and Experimental Verification of Targeted and Variable Sprayer for the Potato. Agriculture 2023, 13, 797. https://doi.org/10.3390/agriculture13040797
Li L, He X, Xiao Y, Jiao T, Li W. Design and Experimental Verification of Targeted and Variable Sprayer for the Potato. Agriculture. 2023; 13(4):797. https://doi.org/10.3390/agriculture13040797
Chicago/Turabian StyleLi, Longfei, Xin He, Yumeng Xiao, Taowei Jiao, and Wei Li. 2023. "Design and Experimental Verification of Targeted and Variable Sprayer for the Potato" Agriculture 13, no. 4: 797. https://doi.org/10.3390/agriculture13040797